UNIVERSIDADE DE CABO VERDE
Universidade em Rede
www.unicv.edu.cv
FICHA TÉCNICA
Título
Fundamentos de Geometria Não-standard
Revisão
Paulino Fortes
Concepção Gráfica
GCI - Gabinete de Comunicação e Imagem da Uni-CV
Edições Uni-CV
Praça Dr. António Lereno, s/n - Caixa Postal 379-C
Praia, Santiago, Cabo Verde
Tel (+238) 260 3851 - Fax (+238) 261 2660
Email: [email protected]
Copyright©
Paulino Fortes / Universidade de Cabo Verde
ISBN
978-989-8707-04-8
Praia, junho de 2014
FUNDAMENTOS DE
GEOMETRIA NÃO - STANDARD
Paulino Fortes
Praia, Cabo Verde - 2014
Índice
Prefácio
v
Dedicatória
ix
Símbolos
xiii
Introdução
1
I
5
Algumas bases históricas
1 Introdução histórica à Geometria Não-Arquimediana
1.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Os primórdios: ângulos de contingência . . . . . . . . . . . . . . . .
1.3 Ressurgimento das ideias . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Dois posicionamentos referenciais: Poincaré e Schoën ies . . . . . .
1.4.1 O ponto de vista de H. Poincaré . . . . . . . . . . . . . . . .
1.4.2 O ponto de vista de A. Schoën ies . . . . . . . . . . . . . .
1.5 Notícias sobre outros desenvolvimentos . . . . . . . . . . . . . . . .
1.5.1 Sistemas ordenados Não-Arquimedianos de Hans Hahn . . .
1.5.2 Hensel, Kurshack e Tate: Geometria Não-Arquimediana de
números . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.3 Ideia da GNA Não-Comutativa de Alain Connes . . . . . . .
1.6 Conclusões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
9
9
10
12
14
14
16
19
19
. 22
. 26
. 28
2 A Geometria Não-Arquimediana segundo Hilbert
2.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.1 O contínuo Hilbertiano: axiomas de Arquimedes e de DedekindHilbert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.2 Consistência e independência dos modelos . . . . . . . . . . .
2.2 Geometria Não-Arquimediana de Hilbert . . . . . . . . . . . . . . . .
2.2.1 Um modelo analítico de GNA de Hilbert . . . . . . . . . . . .
2.2.2 Cálculo Não-Arquimediano das proporções . . . . . . . . . . .
2.2.3 O modelo geral de Geometria Analítica Não-Arquimediana de
Hilbert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
i
29
29
30
31
35
35
37
42
ii
2.2.4 Aplicação: teoria Não-Arquimediana de áreas planas . . . . . 44
2.2.5 Geometria Não-Arquimediana Não-Pascaliana . . . . . . . . . 51
2.3 Conclusões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3 A Geometria Não-Arquimediana segundo Veronese
3.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 O problema e as hipóteses do contínuo . . . . . . . . . . . . . . . .
3.3 Geometria Não-Arquimediana de Veronese . . . . . . . . . . . . . .
3.3.1 Elementos . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.2 Alguns resultados . . . . . . . . . . . . . . . . . . . . . . . .
3.3.3 Congruência de guras . . . . . . . . . . . . . . . . . . . . .
3.3.4 Geometria Não-Arquimediana de Hilbert versus Geometria
Não-Arquimediana de Veronese . . . . . . . . . . . . . . . .
3.4 Conclusões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
II
.
.
.
.
.
.
. 88
. 91
Análise Não-Standard e Geometria Não-Standard
4 Métodos da Análise Não-Standard
4.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Análise com ordens de grandeza . . . . . . . . . . . . . . . . .
4.2.1 Ordens de grandeza no conjunto dos números reais . .
4.2.2 Álgebra das ordens de grandezas . . . . . . . . . . . .
4.2.3 Algumas aplicações . . . . . . . . . . . . . . . . . . . .
4.3 Fundamentos da Análise Não-Standard . . . . . . . . . . . . .
4.3.1 Duas vias para a ANS – a construtiva e a axiomática
4.3.2 A teoria dos conjuntos internos (I.S.T) . . . . . . . . .
4.4 Conclusões . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 O conceito de Geometria Não-Standard
5.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Denições tentativas . . . . . . . . . . . . . . . . . .
5.2.1 Modelos Standard e Modelos Não-Standard de
5.2.2 Exemplos de Geometrias-Não Standard . . . .
5.2.3 Denição clássica de GNSNA (Analítica) . . .
5.2.4 Denição Kleiniana de GNSNA . . . . . . . .
5.3 Conclusões . . . . . . . . . . . . . . . . . . . . . . . .
59
59
68
79
81
84
86
93
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
95
95
95
95
98
100
103
103
105
117
. . . . . . .
. . . . . . .
Geometria .
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
119
119
119
120
121
125
126
127
.
.
.
.
.
.
.
.
.
III Modelos de Geometria Não-Standard Não-Arquimediana:
construção e aplicações
129
6 Revisões do modelo fundacional e da classicação Hilbertiana de
geometrias
133
6.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
iv
9.3.1
9.3.2
9.3.3
9.3.4
9.3.5
Apresentação do modelo . . . . . . . . . . . . . . . . . . . .
Generalidades sobre o modelo . . . . . . . . . . . . . . . . .
Estrutura geométrica da reta sincopada . . . . . . . . . . . .
Geometria plana . . . . . . . . . . . . . . . . . . . . . . . .
Aplicação: um exemplo da teoria Não-Arquimediana das áreas
planas (Hilbert) . . . . . . . . . . . . . . . . . . . . . . . . .
9.4 Conclusões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10 Um
10.1
10.2
10.3
modelo métrico Birkhoffiano de GNSNA
Introdução: . . . . . . . . . . . . . . . . . . .
Os axiomas de Birkhoff . . . . . . . . . . . . .
Réguas e transferidores Não-Standard . . . . .
10.3.1 Modelo geral Métrico Não-Standard . .
10.3.2 Principais consequências de 0 1 a 0 8 .
10.3.3 Exemplos de realizações do modelo . .
10.4 Novas noções . . . . . . . . . . . . . . . . . .
10.5 Conclusões . . . . . . . . . . . . . . . . . . . .
IV
Discussão e conclusões
11 Discussão e conclusões
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
200
201
204
214
. 221
. 223
225
. 225
. 225
. 228
. 228
. 230
. 231
. 234
. 234
237
239
A Representação geométrica de uma parte do contínuo absoluto (Veronese)243
B Axiomas da Geometria de Veronese
Bibliografia
245
247
Prefácio
A presente monografia foi escrita há dez anos. Durante esse tempo não tive a
oportunidade de a publicar, por razões várias, sobretudo de ordem profissional.
Com efeito, por estarmos ainda em fase de construção da Universidade de Cabo
Verde – a que sou profissionalmente afiliado – o que me levou sempre a ter uma
intensa atividade letiva e muitas vezes a assumir cargos de gestão. Assim, apesar das
recomendações do júri da tese de doutoramento [31] para a publicação da mesma,
não pude me dedicar a uma revisão, adaptação e integração das considerações então
produzidas.
Assim, aproveitando a licença sabática fiz uma revisão do texto, muito topicamente, uma vez que encontro-me dedicado a outro projeto de investigação.
Em dez anos o património matemático da Humanidade cresce desmesuradamente
e quem esteve nas circunstâncias que acima referi, não poderia ter acompanhado de
forma satisfatória os progressos da Ciência. Contudo, que seja do meu conhecimento,
ainda não se avançou rigorosamente nada na área dos Fundamentos da Geometria
Não-Arquimediana e da Geometria Não-Standard no geral. Esse facto convenceu-me
da utilidade da divulgação agora do presente texto.
Escrito em linguagem tentativamente pedagógica, com preocupações didáticas
evidentes1 , bastamente autosuficiente, o texto pretende ser acessível a estudantes
dos primeiros anos dos cursos de Matemática. Apesar disso, a monografia traz
o estilo de relatório de investigação, o que beneficia aqueles que procuram estas
matérias para se iniciarem na investigação e não prejudica o uso didático.
A monografia relata uma investigação sobre os Fundamentos da Geometria NãoStandard. Tal matéria ainda não existe nas classificações internacionais de Ciência,
emergente que é. De fato, as investigações em Matemática podem revestir-se de
dois aspetos, frequentemente conciliáveis: a construção de uma teoria ou a construção de um teorema (dentro de uma teoria). A primeira perspetiva corresponde
ao chamado esprit de géométrie e o segundo ao esprit de finesse. Um projeto de
fundamentos é necessariamente um projeto de teoria: a procura de axiomas, a construção de modelos e o respetivo estudo de consistência. Naturalmente durante a
investigação aparecem entes que devem ser batizados e classificados em definições e
devem aparecer resultados que relacionam os entes da teoria, entre si e com outros.
Esses resultados devem ser formulados como teoremas e proposições e serem demon1
Entre as quais conta o facto de as definições e alguns teoremas serem identificados pelo assunto
que tratam.
v
vi
strados. Durante a investigação seguimos este caminho. Deixamos para trabalhos
posteriores a exploração de resultados mais finos. Também não exibimos no texto a
demonstração de muitos resultados, o que constitui um convite ao leitor a ter sempre
durante a leitura lápis e papel.
O domínio desta investigação é bastante contra-intuitivo: escalas, numéricas e
geométricas, com várias ordens de grandeza, incluindo as infinitamente grandes e
as infinitamente pequenas atuais. Apesar de na Análise, quer standard quer nãostandard, já haverem muitos instrumentos para trabalhar os infinitos e apesar de
Georg Cantor ter aberto o universo numérico para além do finito, esse terreno continua ainda a ser desconfortável para quem por ele se aventura. Os caminhos de
Cantor são pouco intuitivos para além de requererem um aparato técnico não desprezável. Abre as portas do transfinito e dos infinitamente grande actuais. Mas não
aceita os infinitamente pequenos atuais [11]. Giuseppe Veronese, contemporâneo de
Cantor, segue outro caminho: olha com simetria para os processos de ultrapassagem
dos horizontes infinitamente grande e infinitamente pequeno. Considera que não há
razões para o espaço se comportar de maneira assimétrica em relação aos infinitos. Ataca a "origem do mal": o axioma de Arquimedes. Constrói um conjunto
numérico transescalar e geometrias sintética e analítica independentes do axioma
de Arquimedes [3]. Ultrapassa, de forma simétrica, todos os horizontes da escala
humana, confinados pelo axioma de Arquimedes. Reduz o nosso mundo, a nossa
matemática usual, a apenas local, tal como Riemann, Gauss, Lobatchewski e Bolyai
reduziram a Geometria Euclidiana a uma geometria local.
David Hilbert, com preocupações exclusivamente logicistas, também fundamentou uma Geometria Não-Arquimediana, não tendo, por aquela razão deduzido quaisquer consequências para uma geometria do nosso mundo. Contudo, a construção
Hilbertiana é definitiva e tem todos os ingredientes que faltam a Veronese: o rigor
lógico, no sentido de Peano e outros, para além do embasamento na recém criada
teoria de conjuntos de Cantor.
Na nossa investigação seguimos Hilbert para os aspetos logico-formais absolutamente indispensáveis e Veronese para a intuição geométrica, olhando para uma
geometria que ajude a entender o espaço. Trata-se de um projeto que tem de ser
continuado até ao amadurecimento e necessário apuramento.
Um trabalho de investigação nunca é isolado nem solitário. Registo mais uma
vez os meus agradecimentos ao Departamento de Matemática da Universidade de
Évora, que me acolheu, e me proporcionou boas condições de trabalho – as mesmas
que as dos seus membros –, que muito contribuíram para que o projeto e outras
investigações relativas fossem desenvolvidos.
O Centro Internacional de Matemática (CIM) ajudou-me na atribuição de uma
bolsa de estudos e facultou-me apoio para ações de formação.
A minha estadia na Universidade de Évora no quadro da realização dos trabalhos
conducentes a esta dissertação foi, em momentos diferentes e de formas diferentes,
suportada pela Universidade de Évora através da Fundação Luis de Molina, Centro
de Investigação em Matemática e Aplicações da Universidade de Évora (CIMAUE) – de que sou membro, Fundação Calouste Gulbenkian e, de forma largamente
viii
À memória de Manuel Fortes (1924-1992), meu Pai – Carpinteiro e Geómetra!
ix
x
[...] il est arrivé dans la haute Géométrie une chose bizarre, la certitude
a nui à lá clarté. On tient toujours le fil du calcul, guide infaillible, il
n’importe où l’on arrive, il y falloit arriver, quelques ténebres qu’on y
trouve. De plus, la gloire a toujours été attachée aux grandes recherches,
aux solutions des Problemes difficiles, & non à l’éclaircissement des
idées.
Je cru que cet éclaircissement, négligé par les habiles Géometres, pourroit
être utile à la Géométrie; on n’en marchera pas plus sûrement, mais on
verra plus clair autour de soi, avec le fil qu’on avoit dans des Labyrinthes
sombres, on aura un flambeau, dont la lueur ne sauroit être si petite,
qu’elle ne soit toujours de quelque usage, & même si cette petite lueur
que je présente n’est pas fausse, rien n’empechera qu’on ne l’augmente
beoucoup.
Fontenelle, 1727.
La raison se précipite des contre conceptions comme celle ci. Ça, parce
que, pour une question d’ habitude trés ancienne, elle cherche une image
visuelle. Mais on doit se dégager de ce préjugé, si on veut atteindre la
clairté, et ça c’est ici plus nécessaire que dans le cas de la géométrie
non-euclidienne.
Poincaré, 1901.
A la fin du siècle, deux brillants mathématiciens ce sont parti à des
régions inexplorées pour conquérir une nouvelle province pour les mathématiques. Leurs chemins bientôt se séparèrent: Cantor, l’astronaute a
quitté le champ gravitationnel du calcul habituel pour se lancer dans la
planète inconnue du transfini; Veronese l’explorateur est resté sur la terre
pour se diriger au pays de transarchimédeans qu’il pressentait derrière
l’horizon.
L’époque de ces conquéreurs intellectuels était sans doute passionnante
pour ceux qui l’ont vécu. Aussi pour nous, qui se penchés sur le chaudron
bouillante de tant d’idées, essayons de découvrir dans le magma encore
indifférencié des matériaux pour la science future.
R. P-Reuter, 1992
xi
xii
Símbolos
Siglas e abreviaturas
ANS – Análise Não-Standard
GNS – Geometria Não-Standard
GNA – Geometria Não-Arquimediana
GNSA – Geometria Não-Standard Não-Arquimediana
GNE – Geometria Não-Euclidiana
GNP – Geometria não Pascaliana ou não Papiana
GND – Geometria não Arguesiana ou não Saccheriana
ZFC – Teoria dos Conjuntos (com os axiomas de Zermelo-Fraenkel mais o axioma de escolha)
ZFNC – Teoria Interna dos Conjuntos com os axiomas de Zermelo-NelsonFraenkel mais o axioma de escolha
Notações
conjuntos, pontos
( ) () – relação Arquimediana
R – conjunto dos números reais
Q – conjunto dos números racionais
N – conjunto dos números naturais (inteiros positivos)
Z – conjunto dos números inteiros
C – conjunto dos números complexos
P() – conjunto das partes de ou conjunto potência de
– infinitamente pequeno atual
– infinitamente grande atual
– infinitamente pequeno potencial
– infinitamente grande potencial
∠ – ângulo
] – uma medida ou amplitude do ângulo
4 ¤ – triângulo, quadrilátero
– segmento de reta
←→
– reta incidente em e
|| – medida do comprimento do segmento
−→
– semirreta de origem no ponto
−
−→
→
– raio (reta orientada) incidente em e
xiii
xiv
− − – o ponto está entre o ponto e o ponto .
t – união disjunta de conjuntos
⊥ ⊥ – perpendicular, quase perpendicular.
k k – paralelo, quase paralelo.
k – paralelo no campo do ponto
( ), ( ) – campo de , campo infinitesimal de
( )
( ) – campo infinitesimal plano de , campo infinitamente grande
plano de
(·) – parte standard.
() – é standard
Algumas observações:
Usamos parênteses retos ([ ]) nas referências e citações para introduzir referências
do Autor.
Nos adjetivos referentes a nomes próprios de matemáticos e cientistas, utilizamos
letra maiúscula, seguindo a tradição Anglo-Saxónica, até para que se compreenda à
partida o sentido da palavra. Por exemplo, utilizamos o qualificativo "Carnotiano"
em vez de "carnotiano" para referir a um substantivo relacionado com Lazare
Carnot, Matemático Francês.
O texto segue normas do Acordo Ortográfico.
O texto foi escrito em Late e as referências bibliográficas seguem as normas
usuais na Matemática.
Introdução
A questão da fundamentação matematicamente rigorosa do uso dos infinitos atuais
na Análise só recentemente foi resolvida com a introdução da Análise Não-Standard
(ANS) por Abraham Robinson em 1960 [61]. A abordagem axiomática, cuja possibilidade foi sugerida pelo próprio Robinson [62] e realizada por Keisler e outros,
tornou a ANS mais popular2 , sendo a versão mais usada a de Edward Nelson (1977)
[57], que consiste numa extensão conservativa da teoria de conjuntos de ZermeloFraenkel3 . Contudo o uso dos infinitos atuais na Matemática foi prática bastante
corrente antes do século XIX, até ao seu quase completo apagamento com a criação
do chamado "método − ", por Cauchy, Bolzano e Weierstrass. Este método,
fundado na aproximação infinita potencial, baniu daquela ciência o uso de números
infinitamente pequenos e infinitamente grandes atuais. A utilização até então feita
carecia de uma fundamentação matemática sólida: estava eivada de inconsistências
que conduziram a paradoxos inultrapassáveis com o estádio de desenvolvimento da
lógica e da teoria dos conjuntos de então.
A consumação da retirada dos infinitos numéricos atuais veio a acontecer com
a fixação do conceito de número por Cantor, Dedekind, Peano e posteriormente,
Zermelo, que os reduziram ao conceito de conjunto, na sua recém criada e por
todos celebrada teoria de conjuntos. Nesses novos números não estavam os infinitamente grandes atuais () nem os infinitamente pequenos atuais () de Eudóxio,
Arquimedes, Galileu, Newton, Leibniz, Euler, Fontenelle, du Bois-Raymond, Stolz,
Veronese, Bettazzi, e tantos outros4 . Obras como os Fundamentos da Geometria
(Grundlagen der Geometrie) de Hilbert [50] celebraram e consagraram o conceito
de número Cantor—Dedekindiano, e obras como os Fondamenti di Geometria de
Veronese [72], fundadas sobre os “antigos” números “infinitos”, foram relegadas a
(quase) esquecimento.
Poucos foram os que ousaram, na fase subsequente, isto é, nos princípios do
2
Nomeadamente pela escola de Strasbourg, fundada por Georges Reeb, e a sua ramificação de
Oran, na Argélia.
3
Algumas outras propostas de axiomáticas alternativas são:
— K. Cuda, A Non Standard Set Theory, Comm. Math. Univ. Carolinae, 17 (1976), 647 - 663;
— K. Hrbacek, Axiomatic foundations for Nonstandard Analysis, Fund. Math., 98 (1978), 1- 19;
— Kawai, Nonstandard Analysis by axiomatic method, Southeast Asian Conference on logic,
North-Holland (1983), pp. 55-76;
— D. Ballard, Foundational aspects of “non” standard mathematics, AMS, 1994.
4
Cantor [11] considerou apenas os infinitamente grandes actuais, conceptualmente diferentes
dos considerados até então.
1
2
século XX, fazer estudos que incluíssem os infinitos numéricos atuais. Hans Hahn
foi uma das exceções, com a publicação em 1907 de um artigo, seminal de todos
os pontos de vista, com o título “Sistemas Não-Arquimedianos de Grandezas” [42]
onde lança as bases para o estudo de corpos Não-Arquimedianos, e onde aparecem
os infinitamente grandes e infinitamente pequenos atuais.
A questão dos e dos nos conjuntos numéricos, transporta-se de forma
natural para os espaços geométricos, pois, como se sabe desde Descartes na sua "La
Géométrie" [19], é importante (para a Geometria Analítica) o estabelecimento de um
isomorfismo entre a reta geométrica e um conjunto numérico (no sentido cantoriano
ou outro). Com a referida exclusão dos infinitos atuais da Análise, pode-se dizer que
o desenvolvimento das geometrias que incluem grandezas e , ficou bloqueado,
mais uma vez, quer do ponto de vista analítico, quer do ponto de vista sintético5 .
O aparecimento da ANS veio revelar, na Análise, para além de novos horizontes
de ensino e aplicações, um mundo absolutamente novo, tão presente nos objetos fundamentais, como desconhecido. No seu livro, Lectures on the Hyperreals, Goldblat
(1991) [39] faz uma pequena lista das vantagens da Análise Não-Standard sobre a
Análise clássica:
1) Novas definições de conceitos familiares, frequentemente mais simples, e mais
intuitivamente naturais;
2) Novas demostrações, mais admiráveis, frequentemente mais simples, de teoremas familiares;
3) Novas e admiráveis construções de objetos familiares;
4) Novos objetos com interesse matemático;
5) Novas propriedades e formas de raciocínio bastante poderosas;
Será que existirão igualmente novos horizontes e novos mundos a explorar no
domínio da Geometria? Um dos problemas resolvidos na investigação que desenvolvemos foi o de lançar as bases para uma resposta a esta questão.
Com o desenvolvimento da Lógica e da Teoria dos Modelos pode-se aspirar a,
tal como na Análise, aplicar as novas ferramentas descobertas na exploração da
Geometria.
Por outro lado, há que recuperar antigas obras dedicadas à Geometria NãoArquimediana, das quais destacamos duas: uma, a mais conhecida (sobretudo na
sua parte de Geometria elementar), os Grundlagen de Hilbert; outra, assaz desconhecida, embora bastante vasta, "profunda"6 e pioneira: os Fondamenti de Veronese.
Assim, outro problema que resolvemos na investigação foi o de encontrar em Hilbert
e Veronese, pistas para a fundamentação da Geometria acima referida, que denominaremos "Geometria Não-Standard" (GNS), em homologia à ANS.
Esta investigação é um primeiro trabalho para a fundamentação da GNS, na
tradição clássica da teoria ZFC de conjuntos e suas extensões conservativas7 . Por isso
5
O primeiro bloqueio terá acontecido com a retirada dos ângulos de contingência para fora do
convívio da Geometria, com os Elementos de Euclides (ver capítulo 1, secção 1.2).
6
Ver [49], pág. 34.
7
Excluem-se as tentativas recentes de fundamentação de “Análise suave” (soft Analysis) na
geometria diferencial sintética, a qual tem por base, não a teoria dos conjuntos, mas sim a teoria
4
– Resolução de alguns problemas elementares nos novos modelos.
Esta monografia está dividida em quatro partes, onze capítulos. A presente introdução é destinada à colocação e perspetivação do problema central a que concerne
a investigação.
Na primeira parte (Parte I), fazemos uma digressão pela história do conceito
de GNA, com dois objetivos, a saber: i) proceder a uma fundamentação histórica
da GNA; ii) clarificar as pistas que conduzem aos modelos exibidos e propostos
(Capítulo 1); introdução à Geometria Não-Arquimediana de Hilbert (Capítulo 2);
uma introdução à Geometria Não-Arquimediana de Veronese (Capítulo 3).
Na segunda parte (Parte II) fazemos uma introdução à Análise Não-Standard
com os seguintes objetivos: i) fixar o quadro onde viverão os modelos de GNS a
serem estudados, a saber, a teoria ZFNC de conjuntos (IST); ii) fixar a linguagem
e as notações não-standard; iii) estabelecer os mecanismos a serem usados na GNS;
iv) servir de referência para um paralelismo entre métodos de ANS e métodos de
GNS (Capítulo 4); também apresentamos definições de GNS (Capítulo 5), bem como
exemplos ilustrativos.
Na terceira parte (Parte III), iniciamos com um capítulo de revisão da classificação das geometrias segundo Hilbert, numa abordagem adequada ao tratamento
dos capítulos seguintes (Capítulo 6). Propomos um modelo sintético baseado nos
axiomas de Hilbert e Veronese (Capítulo 7), bem como uma sua realização analítica e
aplicações do modelo na resolução de alguns problemas standard elementares (Capítulo 8). No capítulo seguinte (Capítulo 9), propomos modelos sintéticos, com aplicações; no seguinte (Capítulo 10), propomos um modelo métrico baseado nos axiomas de Birkhoff bem como algumas realizações.
A quarta parte (Parte IV) é dedicada a uma revisão crítica do estudo, acompanhada de uma perspetivação de continuidade do projeto de investigação (Capítulo
11).
Parte I
Algumas bases históricas
5
7
Os matemáticos dos finais do século XIX e início do século XX foram impelidos
a lidar com o problema da Geometria Não-Arquimediana, quer em termos de contributos diretos, com produtos de investigação, quer através da participação em
discussões. Dessa época frutífera que, no que diz respeito à geometria, é apenas comparável à das geometrias Não-Euclidianas, que a antecedeu algumas décadas, resultou, em particular, a moderna teoria dos corpos ordenados e a Análise
Não-Arquimediana [8], mas também bases fundamentais para o desenvolvimento da
análise com infinitesimais9 , muito em voga nos séculos XVII e XVIII, na procura de
legitimar o uso dos números infinitos atuais, grandes e pequenos, na Análise.
A discussão desenvolveu-se em torno de dois eixos: Veronese, com os seus Fondamenti di Geometria [72] e Hilbert com os seus Grunlagen der Geometrie [50].
Veronese terá sido o primeiro em data a relançar o debate ao propor uma fundamentação sintética para uma geometria onde deliberadamente nega a necessidade do
axioma de Arquimedes; Hilbert, por força de uma investigação logico-geométrica que
o conduz à negação do axioma de Arquimedes no processo de teste da independência
dos axiomas por ele propostos.
O debate começara com Fontenelle [29], du Bois-Reymond, Hermann Helmholtz
e Otto Stolz. Muitos foram os intervenientes. Pode-se citar os casos de Bettazzi [9],
Levi-Civita, Hölder, Schöenflies, Hahn, no eixo Veronese, e Poincaré, Peano, Cantor,
Bernays, Schöenflies, Killing, Klein, no eixo Hilbert.
Nesta parte fazemos uma digressão pelos argumentos de alguns intervenientes e
pelas suas contribuições (capítulo I), dando obviamente principal destaque a David
Hilbert e Giuseppe Veronese (capítulos II e III, respetivamente).
Como ponto de partida histórico, relembramos os polémicos ângulos cuniformes
da geometria clássica, banidos por Euclides da sua sistematização da geometria, por
a álgebra daqueles não obedecer ao famoso axioma de Eudóxio-Arquimedes.
9
Ou Análise Não-Standard, como viria a ser conhecida mais tarde
8
CAPÍTULO 1
Introdução histórica à Geometria
Não-Arquimediana
1.1
Introdução
Os sistemas de grandezas Não-Arquimedianas, isto é, estruturas algébricas baseadas
em conjuntos com grandezas incomensuráveis – ou por terem natureza diferente,
ou por possuírem infinitos atuais1 – sempre assombraram filósofos e matemáticos.
Eudóxio e Euclides trataram de assumir postulados que debelavam as grandezas infinitesimais e as infinitamente grandes atuais2 . Com isso, eliminaram os ângulos de
contingência – criaturas que trazem para a escala macroscópica aquilo que se passa
a escalas infinitesimais: a incomensurabilidade de grandezas angulares aparentemente todas macroscópicas. Arquimedes estabeleceu no seu Tratado da Esfera [3]
um postulado para garantir a comensurabilidade de grandezas que usa no método de
exaustão. Mas o assunto dos infinitos atuais foi sempre recorrente. Foi bastamente
utilizado pelos matemáticos dos séculos XVIII e XIX tendo eles lançado as bases
para a Matemática pura e para a Matemática aplicada às ciências e às técnicas. Mas
apenas recentemente se veio a fundamentar rigorosamente o uso dos infinitos atuais,
com Robinson em 1960 [61]. Outros tomaram as rédeas e hoje podemos descomplexadamente usar esses infinitos na Matemática. Neste capítulo vamos seguir o fio
da História para acompanhar o desenvolvimento do pensamento matemático sobre
grandezas numéricas e geométricas infinitamente pequenas e infinitamente grandes
atuais.
1
Grandezas tais que uma não pode ser tomada como unidade para medir a outra e vice-versa.
A incomensurabilidade resulta tanto do facto de as grandezas terem natureza diferente (exemplos:
área e volume, espaço e tempo, real e imaginário) como por existirem infinitos actuais, inexcedíveis
num processo de medição com unidades inadequadas.
2
Na esteira da tradição Aristoteliana: "um infinito em ato não pode existir".
9
10
Introdução histórica à Geometria Não-Arquimediana
1.2
Os primórdios: ângulos de contingência
Os antigos já se tinham cruzado com grandezas geométricas Não-Arquimedianas: os
chamados ângulos cuniformes (pelos gregos) ou de contingência (por J. Nemorarius
[24]). Trata-se de ângulos entre uma curva e a sua tangente num ponto, ou entre duas
curvas. Nos seus Elementos, livro III, proposição XVI, Euclides mostra que o ângulo
formado por uma circunferência e a sua tangente é menor que todo o ângulo de lados
retilíneos, o que se pode generalizar a uma cónica qualquer. Essa demonstração, a
saber, de que o ângulo retilíneo e o de contingência não são "comensuráveis" foi,
como no caso da diagonal dum quadrado em relação ao seu lado, motivo de grande
pânico, que prolongou-se durante séculos, entre os matemáticos.
Com efeito, a avaliação da ordem de grandeza do ângulo de contingência levantou
muita controvérsia. Por um lado havia uns, como Peletier (século XVII), que diziam
que se tratava duma grandeza nula (quantitas non est [24]), e por outro lado havia
aqueles, como Clávio (mesmo século), para quem um tal ângulo devia ser considerado
não nulo, porém infinitamente pequeno em relação aos ângulos de lados retilíneos
– sujeito no entanto às operações usuais de adição e multiplicação.
Assim, a questão dos ângulos de contingência preocupou os melhores matemáticos da época, ao longo dos séculos XVI, XVII, e XVIII, tendo havido matemáticos
como Viète, Galileu e Wallis que tomaram o partido de Peletier, e outros como
Hobbes, Leibniz e Newton que adotaram o ponto de vista de Clávio.
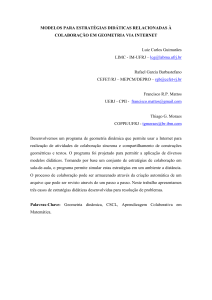
Uma generalização desse tipo de ângulos, os chamados ângulos lunares, foi introduzido por Klein [51] com vista a demonstrar a independência do axioma de
Eudóxio-Arquimedes na Geometria Euclidiana de Hilbert.
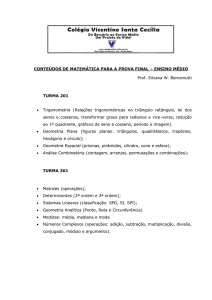
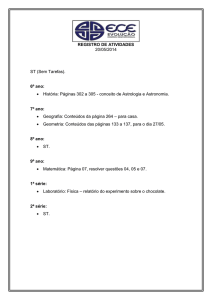
Um ângulo lunar obtém-se do seguinte modo: trace-se com origem num ponto
um arco de circunferência Γ de amplitude inferior a 180 , que intersecta uma
←→
←→
reta . No semiplano onde existe o arco, delimitado pela reta , trace-se uma
−→
semirreta que não intersecta Γ senão em . A figura obtida é um ângulo lunar
(figura 1).
Fig. 1. Ângulos lunares. Fonte: Autor.
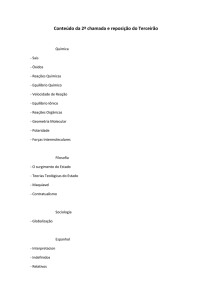
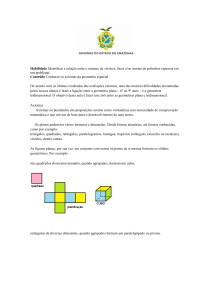
Um ângulo lunar cujo lado retilíneo é tangente ao lado curvilíneo (figura 1 B),
1.2
Os primórdios: ângulos de contingência
11
diz-se ângulo lunar de lado tangente.
Fig. 2. Ângulos lunares de lado tangente. Fonte: Autor.
−→
Dados dois ângulos lunares de lado retilíneo comum , o menor é aquele que
−→
numa vizinhança circular de tiver pontos mais próximos de (figura 2), isto
é, o maior é aquele cujo lado curvilíneo tiver menor curvatura. Dados dois ângulos
lunares de lados tangentes, o maior é aquele cujo lado curvilíneo tiver menor curvatura. Todo o ângulo lunar é decomponível num ângulo de lados retilíneos e
num ângulo lunar de lado tangente 0
= + 0
Na figura abaixo, = ∠ :
Fig. 3. Decomposição de um ângulo lunar. Fonte: Autor.
Um ângulo de lado tangente, decompõe-se em = 0 + 0 Consideremos dois
−→
ângulos lunares = + 0 , = + 0 de lado tangente comum , situados do
−→
mesmo lado de . Define-se a soma de com do seguinte modo:
+ = + + ( + )0
onde ( + )0 é ângulo de lado tangente de mesma natureza que e , e cujo lado
curvilíneo tem curvatura igual à soma das curvaturas dos lados curvilíneos de e
3
3
A amplitude de um ângulo cuniforme é a diferença entre as curvaturas dos lados. Tratase de um número real pertencente ao intervalo [0 +∞[ No caso de um ângulo lunar de lado
tangente, a amplitude do ângulo é igual à curvatura do lado curvilíneo visto que o lado retilineo
tem curvatura zero. Um ângulo lunar de lado não tangente tem amplitude de dupla natureza: a
circular, correspondente ao ângulo de lados retilíneos na decomposição e a curvatura correspondente
ao ângulo de lado tangente na mesma decomposição.
12
Introdução histórica à Geometria Não-Arquimediana
O conjunto A dos ângulos lunares fica assim munido duma estrutura de grupo
ordenado. De fato (A +) é um grupo ordenado, cujo elemento neutro é o ângulo de
lado tangente de lado curvilíneo com curvatura igual a zero (isto é, o lado curvilíneo
coincide com o retilíneo). Ademais, como faz notar Klein, (op. cit.) qualquer ângulo
lunar de lado tangente é inferior a qualquer ângulo de lados retilíneos. Assim, um tal
ângulo lunar é um infinitamente pequeno em relação aos ângulos retilíneos. Ora, os
ângulos lunares de lado tangente estão ordenados pela curvatura do lado curvilíneo.
Fica assim estabelecida uma ordem total dentro de uma classe de infinitamente
pequenos – são absolutamente distinguíveis, explicitáveis uns em relação aos outros.
Essa classe constitui um subgrupo ordenado Arquimediano de A, assim como o
conjunto dos ângulos de lado retilíneo. Em suma, (A +) é um grupo ordenado
Não-Arquimediano, pois para todo o ∈ N, arbitrário, e os ângulos lunares com
= 0 + 0 e = + 0 0, qualquer, tem-se:
1.3
Ressurgimento das ideias
De acordo com o que dissemos acima a propósito dos desenvolvimentos da Geometria
no século XIX, nos finais dos anos 1860 havia na Europa uma grande agitação4 ,
com o ressurgimento da Geometria Não-Euclidiana (GNE), com Riemann, Klein,
Beltrami, Poincaré, por um lado, e com a continuação do programa de rigorização
da Análise, iniciado com Bolzano [5] e Weierstrass, continuado então por Dedekind
e Cantor, por outro. Essa agitação terá sem dúvida levado a um renovado interesse
pelos sistemas ordenados Não-Arquimedianos de grandezas.
A GNE constituía o primeiro exemplo de uma geometria fundada sobre a chamada
Geometria Absoluta5 , mais um postulado que implica a negação de um dos axiomas
de Euclides, o já celebremente suspeito postulado das paralelas. É também o início
do próprio desenvolvimento da teoria das axiomáticas (teoria dos modelos), com um
salto qualitativo no sentido da rigorização (através da lógica) da própria axiomática:
ao exibirem modelos que verificam todos os axiomas de Euclides, excetuando-se o
das paralelas, Beltrami e Klein estabeleceram, por um lado a não-contradição relativa dos axiomas e, por outro lado, a independência desse axioma – método que
veio a tornar-se corrente para situações similares.
Por outro lado, as primeiras construções dos números reais, em bases puramente
algébrico-analíticas (Dedekind e outros), permitiram compreender a questão da continuidade, pondo a nu vários conceitos relacionados6 . O primeiro e mais importante
aspeto foi ter-se mostrado que o princípio de continuidade de Dedekind, originalmente de inspiração geométrica mas aplicado ao conjunto dos números reais [15],
podia ser usado como um axioma de continuidade para a reta geométrica [50]. O
programa de reformulação dos axiomas da Geometria, tendo em conta a sua natureza
e a sua precedência numa lista (Pasch, Stolz, Veronese), permitiu analisar melhor as
4
Ver, por exemplo, Veronese, Fondamenti [72].
Sem qualquer axioma de paralelas.
6
Ver [31], Apêndice D.
5
1.3
Ressurgimento das ideias
13
questões de independência relativa. A mais alta expressão de todo esse programa,
de cariz puramente lógico, é sem dúvida os Grundlagen de Hilbert, aparecido em
1899.
No meio de toda essa emulação parece natural que, depois da queda do postulado das paralelas de Euclides, as atenções se focassem no postulado de Arquimedes,
o qual, embora não tendo sido claramente explicitado por Euclides, foi largamente
por ele usado, nomeadamente na sua proposição I do livro V [43]. Os primeiros
matemáticos a estudar claramente essa questão foram Veronese (1882) e Otto Stolz,
que apresentou os resultados, em 1883, (ambos altamente influenciados pelos trabalhos de Cantor e Dedekind) nos quais estes últimos propõem axiomas de continuidade (embora nunca visando exclusivamente o caso Não-Arquimediano). Stolz
mostra que o axioma de Arquimedes não é uma consequência da noção de sistema
ordenado de grandezas, visto que consegue exibir sistemas ordenados de grandezas
Não-Arquimedianos – o próprio cálculo de du Bois-Reymond [1870-71] publicado
alguns anos antes, fornecia um exemplo (tão bem como os ângulos cuniformes da
antiguidade clássica). De fato, no seu livro Allgemeine Functiontheorie, distingue
as grandezas «lineares» de grandezas «não-lineares», atribuindo às primeiras a
propriedade de verificação do axioma de Arquimedes. Porém, é difícil dizer se du
Bois-Reymond de fato atribuiu às ordens de grandeza uma grande importância, uma
vez que, segundo Veronese [72] o seu “idealista” não define grandezas , embora
apresente algumas das propriedades dessas grandezas .
Em 1885, Stolz publica os seus Vorlesungen uber Allgemeine Aritmetik, apresentando de novo o seu modelo Não-Arquimediano, um sistema ordenado de funções,
comparáveis através dos respetivos limites no infinito. Nesse livro caracteriza um
sistema de grandezas, da seguinte maneira:
Gi) Duas grandezas podem ser iguais ou desiguais e, neste caso, uma é maior
que a outra;
Gii) As grandezas são adicionáveis, como os números naturais, em particular, a
soma de duas grandezas dum sistema é ainda uma grandeza do sistema;
Giii) se e só se existe no sistema uma grandeza tal que + = ;
Giv) Entre duas grandezas desiguais, existe ainda sempre uma grandeza do
sistema, e existe, ao lado de toda a grandeza do sistema uma grandeza menor que
ela, mas não há uma grandeza mínima.
Trata-se da caracterização dos racionais positivos, ordenados naturalmente, e
algebrizados pela adição.
Para mostrar qual o papel do princípio de continuidade de Dedekind em tais
sistemas, Stolz desenvolve a seguinte argumentação também usada por Veronese:
seja (1 2 ) uma partição do sistema, e um elemento de 1 , um elemento de
2 ( ). Tem-se os seguintes casos possíveis:
i) 1 tem um último elemento e 2 tem um primeiro elemento;
ii) 1 tem um último elemento e 2 não tem um primeiro elemento;
iii) 1 não tem um último elemento e 2 tem um primeiro elemento;
iv) 1 não tem um último elemento e 2 não tem um primeiro elemento;
O caso i) é excluído pela propriedade Giv) dos sistemas de Stolz. No caso iv),
14
Introdução histórica à Geometria Não-Arquimediana
( ) é denominado por Stolz, de uma lacuna. Define então sistema contínuo como
um sistema sem lacunas, e demonstra a seguinte propriedade importante:
Proposição 1.1 (Stolz) Um sistema contínuo (no sentido de Dedekind) é Arquimediano.¤
Isto é, um sistema no qual, todo o conjunto não vazio limitado superiormente
possui supremo (axioma de Dedekind), satisfaz o axioma de Arquimedes.
Num sistema com lacunas, Stolz considera dois casos: as lacunas de primeira
espécie, e os cortes, nos casos em que, respetivamente, se tem:
Li) existe uma grandeza tal que + , qualquer que seja de 1 e
de 2
Lii) para toda a grandeza , existe de 1 e de 2 tal que −
E finalmente prova que:
Proposição 1.2 (Stolz) Um sistema pode ser completado através de cortes (no
sentido de Dedekind) se e só se for Arquimediano.¤
A recíproca é verdadeira, isto é:
Proposição 1.3 (Veronese) Se um sistema for Arquimediano, então pode ser completado através de cortes (no sentido de Dedekind).¤
Stolz atribui este resultado a Veronese.
1.4
Dois posicionamentos referenciais: Poincaré e
Schoënflies
Apresentamos a seguir importantes análises da Geometria Não-Arquimediana, por
parte de dois intervenientes no debate aberto. Esses pontos de vista fornecem uma
antevisão das ideias críticas da GNA de Hilbert e de Veronese, respetivamente.
1.4.1
O ponto de vista de H. Poincaré
As ideias iniciais de Poincaré sobre a Geometria Não-Arquimediana são apresentadas no seguimento da sua leitura dos Grundlagen de Hilbert, a quem atribui a
originalidade da conceção dessa geometria (ver [50], suplemento V). Essa atribuição
é injusta visto que Veronese já houvera publicado (1891) os seus Fondamenti, depois
de vários anos de divulgação de ideias sobre a Geometria Não-Arquimediana [72].
A Geometria Não-Arquimediana é, para Poincaré, essencialmente analítica: tratase de um sistema Não-Arquimediano de coordenadas, digamos de dimensão 3, que
serve para referenciar figuras geométricas num espaço mais complexo que o Euclidiano. Assim o corpo de base duma Geometria Não-Arquimediana é um corpo
Não-Arquimediano.
1.4
Dois posicionamentos referenciais: Poincaré e Schoënflies
15
Para construir um corpo Não-Arquimediano Poincaré indica, em primeiro lugar,
que é preciso criar um conjunto Λ de números Não-Arquimedianos devidamente
ordenado e algebrizado com operações de + e × (compatíveis com a ordem, com a
estrutura algébrica de corpo ordenado), o que propõe dever ser feito em 3 passos:
1 As regras aritméticas para as operações de adição e multiplicação (as leis
comutativa, associativa, distributiva, etc..) devem aplicar-se sem qualquer alteração;
2 As regras para o estabelecimento e a transformação de desigualdades também
devem ser mantidas (princípios lógicos de equivalência de equações, por exemplo);
3 O axioma de Arquimedes não deve ser universalmente aplicável.
O objetivo da criação de um tal corpo Λ é o de transferir a sua estrutura para a
reta geométrica através de um isomorfismo de ordem conveniente.
Poincaré consegue esse corpo generalizando o corpo Ω de Hilbert7 , procedendo
da seguinte forma: Λ é o conjunto das séries formais
0 + 1 −1 + 2 −2 +
onde ∈ Z e ∈ R.
Sejam em Λ definidas as operações + e × como as operações ordinárias de adição
e multiplicação para as séries formais. Fica Λ um corpo, para o qual se deve definir
a seguinte ordem: atribuindo a cada série ∈ Λ o sinal de 0 e pondo 1 2
quando 1 − 2 0.
Esta ordem é compatível com a estrutura de corpo de Λ mas o axioma de Arquimedes já não é aplicável. Basta ver que se se considerar dois elementos, 1 e ,
o primeiro adicionado a si próprio tantas vezes quanto se quiser mantém-se sempre
inferior ao segundo. Tem-se sempre , qualquer que seja o número natural ,
visto que a diferença − será sempre positiva pois o coeficiente do primeiro termo
, que, por definição, lhe dá o sinal, mantém-se sempre igual a 1.
É evidente que R ⊂ Λ. Os novos números estão intercalados, nas séries de
números ordinários, de tal forma que se pode ter, por exemplo, uma infinidade de
novos números menores que um número ordinário e maior que todos os números
ordinários menores que o coeficiente .
Com estas premissas, constrói-se um espaço a três dimensões no qual as coordenadas dos pontos são medidas, não pelos números ordinários mas por números
de um corpo Não-Arquimediano, enquanto que as equações usuais das retas e do
plano são mantidas, assim como as expressões analíticas para ângulos e comprimentos. É claro que neste espaço todos os axiomas da Geometria Absoluta permanecem
verdadeiros, mas não o de Arquimedes.
Em toda a reta, pontos novos estariam intercalados entre os pontos ordinários.
Se, por exemplo, 0 é uma reta ordinária, e 1 a correspondente reta Não-Arquimediana;
se é um ponto ordinário qualquer de 0 , e se este ponto divide 0 em duas semirretas e 0 ( não pertencente a nem a 08 ); então haverá em 1 uma infinidade
de pontos novos quer entre e , quer entre e 0 . Existirá ainda em 1 uma
infinidade dos novos pontos que estarão à direita de qualquer ponto ordinário de 0 .
7
8
Ver capítulo 2.
é um "ponto novo".
16
Introdução histórica à Geometria Não-Arquimediana
Resumindo, o espaço ordinário R3 é apenas uma parte deste espaço Não-Arquimediano.
Poincaré é um dos matemáticos que com melhor clareza expôs as ideias associadas
à intuitividade (ou não intuitividade) das geometrias Não-Arquimedianas:
À primeira vista, a mente revolta-se contra conceções como esta (Geometria Não-Arquimediana). Isso porque, por uma questão de hábito
antigo, está à procura de uma imagem visual. Ela deve libertar-se desse
preconceito se quiser atingir a compreensão, e isso é muito mais necessário
aqui do que no caso da Geometria Não-Euclidiana ([50], Suplemento V).
Para Poincaré a construção Não-Arquimediana do espaço é concetualmente mais
exigente (no sentido da profundidade da rutura que se deve fazer com hábitos antigos de intuição espacial) que a conceção não-Euclidiana. Acrescenta no mesmo
documento:
Podemos observar, de passagem, que a Geometria Não-Euclidiana
respeita, por assim dizer, a nossa conceção qualitativa do contínuo geométrico, embora subvertendo as nossas ideias sobre a medição deste
contínuo. A Geometria Não-Arquimediana destrói este conceito através
da dissecação do contínuo, pela introdução de novos elementos ([50], Suplemento V).
Exímio defensor da intuitividade do espaço como motor da Geometria9 , Poincaré
acha estranho que Hilbert – a quem, como se disse, atribui inicialmente a paternidade da Geometria Não-Arquimediana – não exprima nos seus Grundlagen o que
significa, para a intuitividade do espaço, a conceção Não-Arquimediana. Escreve,
quase em forma de lamento:
O Professor Hilbert tem apenas um objetivo em vista: construir um
sistema de elementos capaz de comportar certas relações lógicas; e para
ele é suficiente mostrar que estas relações não envolvem nenhuma autocontradição ([50], Suplemento V).10
1.4.2
O ponto de vista de A. Schoënflies
Arthur Schöenflies, que muito participou nas discussões sobre a Geometria NãoArquimediana, inicia os seus contributos em artigos onde ele revê os fundamentos
9
Não no sentido estático de intuitividade ingénua, mas no sentido dinâmico do desenvolvimento
da capacidade da mente humana para compreender e ter insights sobre novas formas e relações, e
fazer delas um património cultural sempre crescente, sobre a qual se assentam novas intuições.
10
Essa diferença de pontos de vista – lógico-formalista de Hilbert e Platónico-intuicionista de
Poincaré – agudiza-se com o tempo, o que não impede que estes dois monstros sagrados da
Geometria prossigam, cada um na sua senda, dando valiosos contributos no lançamento das bases
da geometria moderna.
1.4
Dois posicionamentos referenciais: Poincaré e Schoënflies
17
algébricos e geométricos da GNA de Stolz e de Veronese. Vejamos as suas posições,
expressas no artigo [66]:
Começa por considerar o sistema de números transfinitos de Veronese. Seja
um número positivo tal que, qualquer que seja ∈ N se tem 1 O número
é um infinitamente pequeno (). O conjunto 1 dos números da forma + com
números para os quais o postulado de Arquimedes é verificado, é um conjunto
de números transfinitos11 de Veronese, do tipo mais simples:
1 = { : = + }
De uma maneira mais geral os números de Veronese constituem um conjunto de
números transfinitos formados com recurso a um número finito de unidades transfinitas, infinitamente grandes () e infinitamente pequenas (), como por exemplo
o conjunto seguinte
2 = { : = + −1 −1 + + 1 + 0 + 1 + + }
onde ∈ N e onde as unidades () e () são números transfinitos tais que
para todo o número finito se tenha
−1
e
−1
qualquer que seja ∈ N
O postulado de continuidade surge com a seguinte forma:
– Se um intervalo (segmento) 0 de um conjunto , cujas extremidades variam, sempre em direções opostas, se tornar indefinidamente
pequeno 12 , existe sempre em 0 um elemento de diferente de
e de 0 (Veronese, [72], p. 612, princípio IV).
Schöenflies nota que para que a continuidade assista a um conjunto de números
transfinitos que seja formado com recurso a um número finito de unidades infinitamente grandes ou infinitamente pequenas, em particular, para os sistemas como os
conjuntos 1 e 2 acima, a aplicação do postulado de Veronese impõe que o conjunto
dos números deve ser contínuo no sentido de R. Dedekind, podendo cada um dos
coeficientes bem como cada um dos coeficientes ser escolhido arbitrariamente
entre os números para os quais seja verificado o postulado de Arquimedes, podendo
11
O termo “transfinito” é aqui utilizado em sentido diverso daquele que geralmente se lhe atribui,
e que está associado aos transfinitos Cantorianos.
12
Para Veronese, as expressões “indefinidamente pequeno” () e “infinitamente pequeno” ()
têm significados diferentes, na medida em que, como convenciona [72], a primeira expressão refere-se
a um processo potencialmente infinito (que aplicado a este caso particular resultaria num segmento
potencialmente infinitésimo); a segunda expressão refere-se a um objeto infinitamente pequeno
atual.
18
Introdução histórica à Geometria Não-Arquimediana
inclusivamente tomar apenas um número finito de valores. Em particular, para o
conjunto 1 de números da forma + a condição a impor é que pertença a um
conjunto contínuo no sentido dos cortes de Dedekind, podendo os números provir
de um conjunto qualquer.
Os números transfinitos mais simples que correspondem ao conceito de contínuo
de G. Veronese são formados recorrendo a um número infinito de unidades transfinitas; duma maneira mais precisa, são da forma
+ −1 −1 + + 1 + 0 + 1 + + +
e contêm um número finito13 de potências de mas uma infinidade de potências
de Schöenflies nota que a restrição ao número de potências de (número que
deve ser finito) é essencial para a manutenção das regras de cálculo, como pretende
Veronese.
Seja
= { : = + −1 −1 + + 1 + 0 + 1 + + + }
verificando as condições de continuidade acima. é um conjunto de números transfinitos de Veronese.
Para que seja munido da estrutura de corpo, Schöenflies, em primeiro lugar, define as operações + e × em considerando as operações + e × usualmente definidas
para séries inteiras formais. Depois nota que é preciso impor certas condições aos
coeficientes e em particular as de pertencerem a um corpo numérico (Q, por
exemplo). Se se impuser a condição de os coeficientes e pertencerem a um corpo
contínuo (como R, por exemplo) obtém-se números mais gerais que os elementos de
.14
Nos seus Fondamenti, Veronese tem como um dos objetivos principais a construção sintética da Geometria projetiva Não-Arquimediana (outro será a Geometria
Multidimensional Não-Arquimediana). Mas, segundo Schöenflies, no cumprimento
desse programa Veronese falha de novo num aspeto essencial: a continuidade (no
sentido de Dedekind).
Schöenflies nota que o conjunto dos números de Veronese pode servir de base
para a Geometria projetiva, desde que não se saia do domínio das relações geométricas lineares visto que todas as operações racionais aplicam-se aos números de G.
Veronese:
13
Esta restrição aqui é essencial. G. Veronese, nos seus Fondamenti, dera um exemplo no qual
figuravam números com uma infinidade de potências de As regras habituais do cálculo não são
mais aplicáveis a tais números; é, no fundo, a objeção de A. Schoënflies (Atti Accad. Lincei Rendic.
Mat.(5) 6 II(1897) pág. 362) à introdução destes números.
G. Veronese e Tulio Levi-Civita (Atti Accad. Lincei Rendic. Mat.(5). 7 I (1898) pág. 79, 91, 113)
observaram que a conceção geral dos números transfinitos de G. Veronese opõem-se à introdução
desses números, que usou inadvertidamente num exemplo; a objeção de A. Schoënflies deixou então
de ter razão de existência.
14
Ver corpos de Laugwitz, por exemplo [68].
1.5
Notícias sobre outros desenvolvimentos
19
Mas quando se sai do domínio dos números racionais, os números
de G.Veronese não são suficientes, apesar das suas propriedades de continuidade, na representação dos pontos, e isso até mesmo se se toma
como coeficientes e que figuram nas expressões dos números de
Veronese, todo os números ordinários (arquimedianos) possíveis.
A causa profunda desta anomalia é que, na continuidade de G. Veronese,
ao contrário da de R. Dedekind, aparecem lacunas às quais não corresponde nenhuma quantidade numérica do sistema contínuo. A continuidade de G. Veronese é, deste ponto de vista, num certo sentido,
mais restrita que a de Dedekind [66].
E Schöenflies cita como exemplo, o caso da determinação dos pontos duplos de
duas pontuais projetivas situadas sobre a mesma reta. Tal determinação pode, em
certos casos, ser ilusória por não existirem tais pontos (coincidiriam com lacunas). O
mesmo problema pode-se colocar na determinação dos pontos de intersecção duma
cónica com uma reta, ou em problemas gerais de intersecção. A resolução do problema deve passar pela introdução de novas unidades de modo a tornar possível a
resolução dos diversos problemas da geometria projetiva.
Schöenflies propõe que para tal se tome como novas unidades potências fracionárias de e de nas quais os expoentes verifiquem certas condições e formando
com estas novas unidades e as potências inteiras positivas de e números mais
gerais que os de G. Veronese [66].
1.5
1.5.1
Notícias sobre outros desenvolvimentos
Sistemas ordenados Não-Arquimedianos de Hans Hahn
Confessadamente influenciado por Veronese, Hans Hahn procurou tirar consequências algébricas da estrutura geométrica da reta (forma fundamental) de Veronese
e com isso lançou as bases para uma teoria geral dos corpos ordenados. Terá
sido o primeiro a classificar os conjuntos ordenados em Arquimedianos e NãoArquimedianos através de um grupo (o grupo de Hahn), lançando as bases para
a teoria dos corpos valuados.15
As ideias de Hahn foram publicadas no artigo seminal “Sobre sistemas NãoArquimedianos de grandezas (Uber die Nichtarchimedishen Grossensysteme, Sitzungsberichte der Mathematisch-naturwissenschaftlichen Klasse der wissenschaften, Wien,
Abteilung 2a, 116, 601-655)” [42]. Hahn apresenta nesse artigo uma definição geral
para um conjunto Não-Arquimediano de grandezas : é um conjunto munido da
estrutura de grupo comutativo totalmente ordenado. Num tal sistema de grandezas,
pode-se estabelecer uma relação de equivalência e de acordo com ela os seus elementos podem ser colocadas em classes de equivalência totalmente ordenadas tais que
para cada classe o axioma de Arquimedes seja válido. Define o tipo de classe do
15
Ver [30].
20
Introdução histórica à Geometria Não-Arquimediana
sistema Não-Arquimediano como sendo o tipo de ordem (Cantoriano) do conjunto
de classes de equivalência.
Proposição 1.4 (Hahn 1907) Existem sistemas Não-Arquimedianos de qualquer
tipo de classe arbitrariamente fixado.¤
Exemplo 1.1 Os números complexos (séries formais) com unidades básicas e
totalmente ordenados, são exemplos de sistemas Não-Arquimedianos de tipo de classe
finito (ver adiante, exemplo 1.2).
Proposição 1.5 (Bettazzi 1890) Qualquer sistema Não-Arquimediano de quantidades, de tipo de classe finito, pode ser representado aritmeticamente através de
números complexos com unidades.¤[9]
Assumindo o princípio da boa ordenação, isto é, qualquer conjunto de grandezas
pode ser bem ordenado, Hanh demonstra os seguintes resultados:
Proposição 1.6 (Hahn 1907) Qualquer sistema Não-Arquimediano de quantidades
pode ser representado por números complexos cujas unidades formam um conjunto
totalmente ordenado, em geral infinito, em que o tipo de ordem do sistema de
unidades é igual ao tipo de classe do sistema Não-Arquimediano.¤
Teorema 1.1 (Hahn 1907) As grandezas de um sistema Não-Arquimediano arbitrário de grandezas (isto é, um grupo totalmente ordenado, abeliano) podem ser
expressas como números complexos cujas unidades formam um conjunto ordenado
Γ, e cujo tipo de ordem é o tipo de classe do sistema Não-Arquimediano.¤
Em cada um desses números complexos, as unidades com coeficientes não nulos
formam em Γ um conjunto bem-ordenado. Hahn aplica para a adição as regras
da adição de séries formais definidas por Veronese, isto é, somando os coeficientes
de unidades iguais. A ordem é obtida estabelecendo que entre dois destes números
complexos, o maior é aquele no qual a primeira unidade que não tem coeficientes
iguais em ambos os números complexos, tem o coeficiente maior (isto é, a ordem
lexicográfica).
Exemplo 1.2 Um sistema Arquimediano é um tipo especial de sistema Não-Arquimediano, de tipo de classe igual a 1. Os números complexos (ordinários, elementos de C) são um sistema Não-Arquimediano de tipo classe igual a 2, se se puser
+ 0 + 0 quando 0 , e + + 0 quando 0 . Todo o imaginário
puro é “menor” que um número complexo não imaginário puro.
Uma parte importante da construção de Hahn é aquela em que a cada elemento
de é associado uma soma, obtida do seguinte modo:
(i) Considerar um conjunto de unidades que formam um conjunto Γ, do
mesmo tipo de ordem que e que são ordenados por “nível”;
1.5
Notícias sobre outros desenvolvimentos
21
(ii) Considerar qualquer conjunto infinito dos com esta ordem, e associando
um real número a cada ;
(iii) Escrever o resultado como uma soma
1 1 + +
Contudo, cada uma dessas somas pode ser vista como uma soma infinita que
contém como parcelas as outras “unidades”, com coeficiente zero, ordenadas segundo
o nível.
No processo acima descrito para associar símbolos a um sistema Não-Arquimediano
, pode acontecer que faltem elementos de para alguma escolha de números reais
numa soma. Nesse caso o sistema diz-se incompleto. Quando existe sempre um
elemento de qualquer que seja a tal “soma”, o sistema é completo.16
Pode-se escolher os sistemas Arquimedianos de Hahn dos grupos totalmente ordenados, impondo que sejam os sistemas com classe tipo 1. Então, diz ele, podese escolher fora deste, os sistemas Arquimedianos completos, impondo o axioma
da completude de Hilbert, aplicada ao seu sistema de grandezas, que enuncia na
forma seguinte: “Não será possível, juntando novas quantidades às quantidades do
nosso sistema, obter um sistema totalmente ordenado mais simples, no qual as seis
condições relativas à adição continuem possíveis17 , sem que disso resultem novas
classes de quantidades”. O que se exige é que nenhuma extensão de um sistema
Arquimediano possa ser feita preservando os axiomas de grupo ordenado.
Para os sistemas Não-Arquimedianos completos, diz Hahn, apenas é necessário
requerer que o sistema tenha um tipo de classe diferente de 1, e requerer a mesma
condição de completude.
Teorema 1.2 (Hahn 1907) Um sistema Arquimediano completo não difere de modo
essencial do sistema de números reais.¤
Hahn mostra que a multiplicação e a divisão podem ser introduzidas como se
segue: suponha-se que se tem um grupo totalmente ordenado , e um conjunto
Γ totalmente ordenado de unidades para elementos de . Suponha-se ainda, que
não apenas mas também Γ é um grupo ordenado, i.e. que há uma adição em Γ
compatível com a sua ordem. Como anteriormente Γ e devem ser do mesmo tipo
de ordem. Dados os elementos 1 1 e 2 2 de , tem-se, para o produto
1 1 · 2 2 = 1 2 1 +2
Sabe-se que 1 +2 ∈ Γ, visto que Γ é um grupo.
Hahn prova ainda que quando 1 e 2 variam independentemente num conjunto bem ordenado, o conjunto de todos os 1 +2 resultantes é um conjunto bemordenado, e além disso que todo o 1 + 2 pode ser obtido como uma soma de
elementos de Γ apenas de um número finito de maneiras.
16
17
Hahn prova que esta definição é independente da escolha da boa ordem das “unidades”.
Válidas.
22
Introdução histórica à Geometria Não-Arquimediana
P
P
Sejam =
e =
dois elementos de . Para determinar o
coeficiente de um arbitrário de no produto de e , expressa-se como
uma soma dos dois elementos de Γ de todas as maneiras possíveis. O número de
maneiras será finito e portanto tem-se
= (11) + (21) = = (1) + (2)
O coeficiente de em é
(11) (21) + + (1) (2)
Hahn mostra que para todo o par de elementos 1 e 3 de , 1 diferente do zero
de , existe um elemento 2 de (quociente de 3 por 1 ) tal que 1 2 = 3 , onde
1 2 são determinados pela multiplicação definida acima. Fica assim demonstrado
que , com sua a adição e subtração definidas acima é um corpo ordenado (com
compatibilidade de multiplicação e ordem) quando a multiplicação e a divisão são
definidas como acima.
Finalmente, Hahn toma a identidade aditiva 0 de Γ e identifica o sistema de
números reais com os elementos 0 onde é real. Então todo o número positivo do
seu sistema Não-Arquimediano, cuja classe é mais alta que , é mais alto que todo
na múltiplo de , e pode ser denominado infinitamente grande atual, em relação a
todo o número das classes inferiores. Semelhantemente, todo múltiplo por de um
número cuja classe é mais baixa que é infinitamente pequeno atual, em relação
aos números das classes superiores.
1.5.2
Hensel, Kurshack e Tate: Geometria Não-Arquimediana
de números
Nesta secção pretendemos clarificar a intuição geométrica que está presente nas
geometrias Não-Arquimedianas dos números -ádicos18 , que constituem exemplos
da vasta classe de geometrias Não-Arquimedianas.
Os números -ádicos foram criados em 1905 por K. Hensel (1861-1941), e constituem uma das mais notáveis extensões do conceito de número, originalmente
identificado com o conceito de número natural. Os corpos Q de números -ádicos
são extensões Não-Arquimedianas do conjunto Q, ao contrário do conjunto R que
constitui uma extensão Arquimediana de R.19
Assim como a Análise Matemática é fundada no conjunto R, existe uma Análise
(Não-Arquimediana) fundada nos corpos Q . Por outro lado, assim como as geometrias clássicas (completas no sentido de Dedekind) são fundadas no isomorfismo
entre a reta geométrica e o conjunto R, existem geometrias Não-Arquimedianas (não
completas no sentido de Dedekind) baseadas nos corpos Q .
18
Uma Geometria de números Não-Arquimediana Não Comutativa tem sido proposta por Paulo
Almeida [Série de conferências proferidas no Departamento de Matemática da Universidade de
Évora, 2003], onde desenvolve uma geometria dos idelos e adelos[2].
19
A única, a menos de isomorfismos.
1.5
Notícias sobre outros desenvolvimentos
23
Ao criar a teoria dos números -ádicos, Hensel veio permitir uma transferência
para a Aritmética das grandes ideias da Análise, e em particular dos desenvolvimentos em série, num quadro que não é o das funções a uma variável real ou complexa,
mas o dos “espaços analíticos rígidos”, como J. Tate os batizou em 1961. Tate
é considerado o pai da moderna teoria Não-Arquimediana das funções, depois de
ter sistematizado a área, na senda de J. Kurschak (1913), A. Ostrowski (1918), R.
Strassmann e W. Schobe (1930) e M. Krasner, nos anos 1940 [8].
Seja um número primo. Qualquer inteiro não nulo pode escrever-se
= 0
em que 0 é um inteiro não divisível por , e é um inteiro ≥ 0. O número é a
valuação -ádica de e escreve-se (), tendo-se portanto
() = 0 se não divide
Proposição 1.7 (i) (−) = ()
(ii) () = () + ().¤
Proposição 1.8 (desigualdade ultramétrica) (+) ≥ min( () ()) se
+ 6= 0 sendo () ().
Dem. Para o provar, escrevamos = 0 , = 0 , em que não divide nem
0 nem 0 ; suponha-se por exemplo ≥ ; então
+ = (− 0 + 0 )
Como pode acontecer que divida − 0 + 0 quando = , pode-se dizer
apenas que ( + ) ; todavia, se , tem-se a igualdade ( + ) =
min( () ()). ¤
Definamos agora, para qualquer inteiro , o valor absoluto -ádico, || :
Definição 1.1 Para = 0, põe-se |0| = 0; se não, toma-se
|| = − ()
Da definição 1.5.2, mais a proposição 1.7, deduz-se então para 6= 0, 6= 0, a
Proposição 1.9 (i) || = 1 se 6= 0 e não dividir ;
(ii) |−| = || ;
(iii) || = || · || .¤
24
Introdução histórica à Geometria Não-Arquimediana
Nota 1.1 As relações (ii) e (iii) desta proposição, são ainda verdadeiras se = 0
ou = 0.
Finalmente tem-se:
Proposição 1.10 Para todos os inteiros , , tem-se
| + | ≤ max(|| || ) ≤ || + ||
Dem. Evidente por definição, se = 0 ou = 0 ou + = 0 ou como
consequência imediata da definição 1.1.¤
Pode-se finalmente definir sobre o conjunto Z dos inteiros uma distância
Definição 1.2
( ) = | − | ;
A verificação dos axiomas das distâncias resulta imediatamente das definições e
das relações (i) e (ii) da proposição 1.9; ( ) é a distância -ádica de a .
Esta distância tem propriedades muito diferentes da distância habitual | − |
e que podem parecer estranhas; se um inteiro 6= 0 não for divisível por , tem-se
| | = 1 para qualquer ≥ 0; pelo contrário | | = tende para 0 quando
tende para +∞. Isso mostra também que para dois números primos diferentes
as distâncias e não são equivalentes.
Em virtude da propriedade ultramétrica dos números -ádicos, uma geometria
que tenha por base um corpo de números -ádicos é muito diferente da geometria
real, seja ela Euclidiana ou Não-Euclidiana.
Exemplo 1.3 Dado um triângulo num espaço -ádico, nenhum dos seus lados pode
ser maior que os outros dois, donde resulta que todos os triângulos são isósceles.
Também, todos os pontos de um círculo estão equidistantes da circunferência do
bordo.
Exemplo 1.4 Num espaço vetorial normado -ádico, dadas três bolas infinitamente
próximas, existe sempre um plano que (num sentido bem preciso) separa uma das
bolas das outras duas.
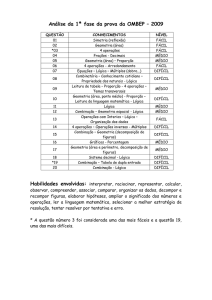
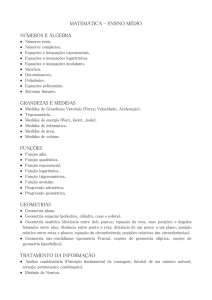
Estes exemplos mostram que a geometria usual não ajuda a intuir os espaços ádicos. Uma maneira visual simples de representar os -ádicos, é através de árvores.
Consideremos, por exemplo, = 2. Qualquer inteiro natural tem uma representação
escrita na base 2 e identifica-se portanto com um ramo de uma árvore diádica (figura
1.5
Notícias sobre outros desenvolvimentos
25
abaixo):
Fig. 4: Árvore diádica. Fonte: Autor.
Qualquer inteiro compreendido entre 0 e 7 escreve-se de uma única maneira
= 0 20 + 1 21 + 2 22 com 0 1 e 2 pertencendo ao conjunto com dois elementos
{0 1}. Para associar a um número inteiro um ramo da árvore, começa-se esse
ramo à esquerda se 0 = 0, à direita se 0 = 1, e continua-se do mesmo modo à
esquerda ou à direita segundo o valor de 1 e assim sucessivamente. Cada inteiro
natural é assim identificado a um ramo da árvore, lido de cima para baixo.
Para representar a ultramétrica -ádica (2-ádica, neste caso) entre dois ramos
desta árvore, basta ver em que nível estes se separam. Os dois ramos estão por
definição tanto mais afastados um do outro quanto mais próximo da raiz da árvore
está o ponto em que se separam. Verifica-se facilmente que dois ramos estão tanto
mais próximos quanto a diferença entre os inteiros correspondentes for divisível por
uma maior potência de 2. É evidente que se os ramos e coincidem até ao nível
, e os ramos e coincidem até ao nível , então os ramos e coincidem pelo
menos até ao nível , em que é o mais pequeno dos números e .
Apesar da geometria -ádica envolver uma intuição diferente da usual para o
espaço físico, por exemplo, hoje é aceite que tais espaços podem ter um papel importante nas escalas de espaço e de tempo extremamente pequenas consideradas
pela Física das partículas.
Desde Hensel, que se sabe utilizar ideias de Análise e de Geometria nas investigações aritméticas. Um dos principais resultados foi obtido por Alexander Ostrowski, que mostrou que, a única maneira Arquimediana de completar o corpo Q
dos racionais, a menos de isomorfismos, é construir a reta real R (correspondente ao
valor absoluto |·|∞ ) . Da mesma forma, qualquer completamento Não-Arquimediano
é, a menos de isomorfismos, igual ao de um dos corpos Q com os valores absolutos |·| . Algumas das aplicações fundamentais dos números -ádicos derivam deste
resultado: por exemplo, uma forma quadrática de coeficientes racionais representa
0 em Q (isto é, anula-se para determinados racionais que não são todo nulos) se e
apenas se ela representa 0 em R e em todos os corpos Q . Pode-se deduzir daqui
que, se o número de variáveis que figuram numa forma quadrática com coeficientes
26
Introdução histórica à Geometria Não-Arquimediana
racionais é pelo menos igual a cinco, esta forma representa 0 em Q desde que representa 0 em R. Um corolário deste último resultado é um teorema devido a Lagrange,
que afirma que qualquer inteiro positivo é a soma de quatro quadrados.
1.5.3
Ideia da GNA Não-Comutativa de Alain Connes
A ideia de base da geometria analítica é, desde Descartes, reduzir o estudo de espaços
geométricos ao estudo das álgebras de polinómios, ou mais geralmente, álgebras de
funções reais ou complexas e delas derivar propriedades geométricas. Como uma
grandeza física que representa a função do estado de um sistema, corresponde a
um operador, torna-se natural quantificar a Geometria, isto é, introduzir noções
quânticas na Geometria, substituindo o corpo de base por uma álgebra, geralmente
não-comutativa, de operadores sobre um espaço de Hilbert.
Esta intuição surgiu em primeiro lugar a Alain Connes e nos últimos vinte anos
tem-se assistido a um interesse crescente em relação à Geometria Não-Comutativa
(ou quântica), quer na Matemática, quer na Física20 . Na abordagem fundacional de
Connes, funcional analítica, as estruturas não-comutativas suaves aparecem nos duais das álgebras-∗ não-comutativas21 . Com efeito são bem conhecidas as dualidades
espaços ←→ álgebras comutativas
espaços produto ←→ álgebras não comutativas
A Geometria Não-Comutativa é baseada na noção de triplo espetral (A H D),
onde A é uma álgebra-∗ não-comutativa, H é um espaço de Hilbert no qual a álgebra A é realizada como uma álgebra de operadores limitados, e é um operador
em H, com as propriedades convenientes, e que contém a informação considerada
geométrica. Está provado que a toda a variedade Riemanniana fechada de dimensão , está associado um triplo espetral canónico, com A = ∞ () a álgebra
das funções complexas suaves em ; H = 2 ( ) o espaço de Hilbert das secções
20
Na secção 2.2.5 mais adiante, vemos que Hilbert desenvolveu em [50] uma Geometria NãoArquimediana Não-Comutativa tendo sido pioneiro nessa matéria.
21
Recordemos que uma álgebra A (complexa) é um espaço vetorial sobre C, munido de um
produto
· : A2 → A; ( ) 7→ · =
distributivo em relação à adição.
O produto · não é, em geral, comutativo.
Uma álgebra unitária possui um elemento I tal que I = I, ∀ ∈ A
Uma álgebra-∗ é uma álgebra munida duma aplicação antilinear de involução:
∗:A→A
tal que:
∗∗ = ; ()∗ = ∗ ∗ ; ( + )∗ = ∗ + ∗
para ∈ A ∈ C (a barra representa a operação de conjugação).
1.6
Conclusões
27
de quadrado integrável do fibrado spinorial irredutível sobre ; e o operador de
Dirac associado à conexão de Levi-Civita da métrica.
O interesse desta breve referência à geometria de A. Connes, é o fato de esta ser
uma Geometria Não-Arquimediana, no sentido que abaixo se vai precisar.
No seu livro de resultados “Noncomutative Geometry” [13], Connes mostra que
uma das mais relevantes consequências da quantificação geométrica é o fato de a
sua geometria não-comutativa ser Não-Arquimediana, isto é, admitir elementos infinitamente pequenos atuais, que são os operadores compactos.
Com efeito, seja K(H) a álgebra dos operadores compactos no espaço de Hilbert
H. Tem-se a
Definição 1.3 (operador de ordem finita) Um operador no espaço de Hilbert H
é dito de ordem finita se o complemento ortogonal do seu espaço nulo é de dimensão
finita.
Basicamente, operador de ordem finita é uma matriz de dimensão finita, mesmo
no caso de H ter dimensão infinita. Tem-se a
Definição 1.4 (operador compacto) Um operador no espaço de Hilbert H é
compacto se puder ser aproximado em norma, por operadores de ordem finita, ou o
que é equivalente, para qualquer que seja 0 existe um subespaço de dimensão
finita de H tal que
k | ⊥ k
Neste sentido, os operadores compactos são infinitamente pequenos. A ordem
de grandeza do operador compacto , ∈ K(H) é dada pelo comportamento da
sucessão de valores característicos { ( )} para suficientemente grande, de acordo
com a
Definição 1.5 (operador de ordem ) Para todo o ∈ R+ os de ordem
são todos os operadores ∈ K(H) tais que, para suficientemente grande se tem
( ) = (− )
A definição é equivalente à seguinte condição
∃ ∞ : ( ) ≤ − ∀ ≥ 1
que evidencia o carácter Não-Arquimediano da geometria não-comutativa de Connes.
Tal como Leibniz, Connes usa os seus infinitesimais para derivar e integrar, o
que lhe permite fazer geometria de variedades, dum ponto de vista absolutamente
novo.
1.6
Conclusões
A história do pensamento matemático e da própria Matemática são estações necessárias a quem investiga matemática, mormente na área dos fundamentos. Para se
poder olhar mais longe devemos "subir aos ombros dos gigantes"22 . Assim, neste
22
Expressão atribuída a Newton.
28
Introdução histórica à Geometria Não-Arquimediana
capítulo seguimos, de forma introdutória, o fio da história do conceito de Geometria Não-Arquimediana, desde os ângulos cuniformes até aos nossos dias. As duas
estações maiores foram sem dúvida os contributos de Hilbert e Veronese, estudado
através das suas obras de referência, os Grundlagen e os Fondamenti, respetivamente. Também vimos o olhar de contemporâneos desses matemáticos sobre as
suas obras nesse campo particular. Dessa revisão retivemos os conceitos e algumas
notações que serão usados nos próximos capítulos.
Concluímos o capítulo passando um rápido olhar sobre alguns desenvolvimentos
modernos na área de geometrias com álgebras de base Não-Arquimedianas.
CAPÍTULO 2
A Geometria Não-Arquimediana
segundo Hilbert
2.1
Introdução
Aproveitando a grande emulação em torno do tema da GNA do seu tempo, Hilbert
desenvolveu uma parte significativa dos seus Grundlagen, expressamente sem recurso ao axioma de Arquimedes. O programa era simples: mostrar a possibilidade
lógica de uma tal geometria e levar tão longe quanto possível as consequências dessa
possibilidade. Para tal mostrou que boa parte dos temas e resultados clássicos são
independentes do axioma de Arquimedes.
Contudo, Hilbert acabou por abrir novos universos, criando sistemas algébricos Não-Arquimedianos próprios, bem como geometrias Não-Arquimedianas especiais (Não-Pascalianas, Não-Arguesianas,...). Neste capítulo pretendemos fazer uma
visita aos seus resultados publicados nos Grundlagen, incluindo os apêndices, acrescentados nas sucessivas edições, seguindo essa publicação1 .
Como ponto de partida para o estudo das questões relacionadas com a Geometria
Não-Arquimediana de Hilbert colocamo-nos em dois temas básicos: as questões de
continuidade e completude geométrica, por um lado, e as questões de consistência
das geometrias e independência dos grupos de axiomas, por outro. Vamos tratar
dessas questões nesta introdução ao presente capítulo.
1
A primeira edição portuguesa, de 1952, deveu-se ao Instituto da Alta Cultura, tradução de
Pilar Ribeiro com a colaboração de Silva Paulo, a partir da sétima edição alemã, sem apêndices
nem complementos. A segunda edição portuguesa foi publicada em 2003 pela editora Gradiva,
tradução de Franco Oliveira e Paulino Fortes, a partir da décima edição inglesa, com apêndices e
complementos de Paul Bernays (colaborador de Hilbert), bem como complementos acrescentados
pelos tradutores, consistindo nas revisões de Poincaré e Enriques.
29
30
2.1.1
A Geometria Não-Arquimediana segundo Hilbert
O contínuo Hilbertiano: axiomas de Arquimedes e de
Dedekind-Hilbert
O contínuo surge na geometria de Hilbert sob a forma de dois postulados que constituem o chamado grupo V, denominados, axiomas de completude (ou de continuidade), a saber:
V1. (Axioma da medida ou axioma de Arquimedes). Se e são dois
←→
segmentos quaisquer, então há na reta um número finito de pontos 1 2
tais que os segmentos 1 1 2 −1 são congruentes com o segmento
e está entre e .
Este axioma é nitidamente uma tradução para a Geometria do axioma de Arquimedes: existe ∈ N tal que
V2. (Axioma da completude linear). Os pontos de uma reta constituem um sistema, com as suas relações de ordem e congruência, que já não pode ser ampliado, se
se quiser manter as relações entre os elementos originais, bem como as propriedades
fundamentais de ordem linear e congruência que resultam dos axiomas I-III e V1.
Têm-se as seguintes relações entre os dois axiomas:
i) O axioma da completude não é uma consequência do de Arquimedes, como se
pode ver em modelos apresentados por Hilbert;
ii) A manutenção de todos os axiomas I-III e teoremas correspondentes, mas não
o axioma de Arquimedes, impossibilita a introdução de um axioma de completude,
sob pena de contradição.
Os dois axiomas de completude podem ser substituídos pelo axioma de completude de Dedekind-Hilbert, em presença dos restantes axiomas, como se faz usualmente nas versões modernas da axiomática de Hilbert:
Axioma da completude de Dedekind-Hilbert Supondo que uma reta é a
união de dois conjuntos não vazios , = Σ1 ∪ Σ2 de tal modo que nenhum ponto de
Σ1 está entre dois pontos de Σ2 e vice-versa, então existe um único ponto ∈ tal
que, para quaisquer pontos 1 2 de está entre 1 e 2 se e só se 6= 1 ,
6= 2 e um dos pontos 1 2 está em Σ1 se e só se o outro está em Σ2 .
Este axioma é a transição para a Geometria do axioma da completude de Dedekind
para a fundamentação do conjunto dos números reais.
O axioma de Arquimedes, mais os restantes axiomas, não garantem a existência
de pontos aderentes a conjuntos nesta geometria, portanto, a existência de limite.
Mas o axioma de Dedekind-Hilbert mais os restantes, que já garante a completude
da reta, (à semelhança da completude à Dedekind do conjunto dos números reais)
implica o axioma de Arquimedes.
A completude de um espaço geométrico geral (de qualquer número de dimensões), é estabelecida por Hilbert no seu teorema geral da completude, que abaixo
se enuncia. Porém, como nota o próprio Hilbert, o seu colaborador, P. Bernays,
demonstrou a suficiência da completude linear para todos os casos.
Teorema 2.1 (geral da completude) Os elementos da Geometria (isto é, os pontos, retas e planos) constituem um sistema que já não pode ser ampliado por meio
2.1
Introdução
31
de pontos, retas e planos, se se quiser manter os axiomas de incidência e de ordem,
o primeiro axioma de congruência e o axioma de Arquimedes ; eles constituem pois
um sistema que já não pode ser assim ampliado mantendo-se todos os axiomas.¤
Este teorema é demonstrado recorrendo de forma essencial ao axioma da completude V2 e ao axioma de incidência I7:
– Se dois planos , têm um ponto comum , então têm pelo menos, mais
um outro ponto comum.
Este axioma limita a dimensão do espaço a três.
Em relação papel do axioma I7 na completude, Hilbert diz:
– Na verdade pode-se mostrar que a um sistema de elementos que
verifique os axiomas I-V, podem juntar-se sempre, pontos, retas e planos,
de tal modo que para o sistema resultante desta composição sejam válidos
os mesmos axiomas com exceção do axioma I7; isto é, um teorema da
completude, no qual o axioma I7, ou um axioma equivalente não estivesse
contido, envolveria uma contradição. [50]
Portanto, para a demonstração da completude geral (do espaço) é necessário
o axioma de Arquimedes, como se referiu acima, e o axioma da dimensão I7. A
completude, à Dedekind, global (no sentido geral do teorema) em dimensão superior
é por isso impossível. Hilbert acaba por sentenciar que a completude à Dedekind
não assiste à 4 dimensão. Uma geometria quadridimensional é não-clássica por
incompleta no sentido de Dedekind-Hilbert. Veremos mais adiante que Veronese
tinha a intuição desse fato.
2.1.2
Consistência e independência dos modelos
Para provar que os axiomas dos cinco grupos não estão em contradição entre si,
Hilbert construiu um modelo simples para esses axiomas recorrendo ao método da
Geometria Analítica e assumindo a consistência da teoria dos números reais, anteriormente bem fundamentada por Cantor (através do recurso a um axioma de completude topológica, que se socorre das sucessões de Cauchy, [ver apêndice IV,[50]])
e Dedekind (com os seus célebres cortes), a partir da fundação da Aritmética.2
2
(i) Como seria natural, Hilbert recorreu à insuspeita Aritmética cuja consistência seria “naturalmente” mais fácil de demonstrar. Acalentaria esse sonho até ao fim da sua vida profissional,
altura em que Gödel demonstrou que a consistência da Aritmética é indemonstrável: Hilbert faleceu
em 1942 e os teoremas de incompletude de Gödel foram publicados em 1931.
Hilbert viria a ser criticado pelos seus contemporâneos pelo facto de se ter socorrido de um
modelo analítico e não de um sintético para demonstrar tal independência. O próprio Felix Klein
deu-se a esse exercício tendo elaborado o modelo dos ângulos lunares (ver 1, 1.2). Mas do ponto de
vista puramente lógico é absolutamente irrelevante a utilização de um modelo algébrico, geométrico,
ou de “mesas, cadeiras e canecas de cerveja”, para usarmos termos do próprio Hilbert.
Do ponto de vista da maximalidade, Hilbert foi criticado por Poincaré pelo facto de o modelo
exibido não representar todo o espaço mas apenas as partes que podem ser construídas com régua e
32
A Geometria Não-Arquimediana segundo Hilbert
Para tal Hilbert considerou o sistema algébrico3 Ω de todos os números algébricos
que resultam, partindo do número 1, efetuar um número finito de vezes as quatro
operações
¯√
¯ aritméticas de adição, subtração, multiplicação, divisão, mais a operação
¯ 1 + 2 ¯ com um número obtido por meio das cinco operações.
Substituindo nos axiomas:
i) “Ponto de Ω” por “( ) ∈ Ω2 ”;
ii) “reta de Ω” pelo “ratio ou proporção ( : : ) de três números de
Ω” ( não simultaneamente nulos);
iii) “Incidência do ponto ( ) na reta ( : : )” pela “existência da igualdade
+ + = 0”
Os números do conjunto Ω são todos reais pelo que Ω é um conjunto ordenado
Arquimediano. Sendo assim Hilbert estabeleceu a seguinte relação de ordem linear
entre os novos pontos e retas: se forem (1 1 ), (2 2 ), (3 3 ) pontos quaisquer
de uma reta , põe-se
(1 1 ) (2 2 ) (3 3 )
se 1 2 3 ou 1 2 3 .
Para a relação de ordem no plano, como exige o axioma II4, procedeu da seguinte
forma: dada a reta ( : : ) ela divide o plano em duas regiões, uma dos pontos
( ) para os quais + + 0 e outra dos pontos ( ) para os quais +
+ 0.
Para os axiomas de congruência (deslocamento de segmentos e ângulos) é suficiente aplicar as transformações conhecidas da Geometria Analítica:
i) Translação de um ponto ( ) para um ponto (0 0 )
½ 0
=+
0 = +
aplicável na deslocação de segmentos e ângulos;
ii) Simetria (em relação à reta = 0)
½ 0
=
0 = −
compasso (ver a recensão crítica de Poincaré em [50]). Por outro lado, foi mais tarde demonstrado
que é possível usar um sub-modelo do modelo de Hilbert para o efeito em questão (as partes do
espaço construtíveis apenas com uma régua graduada).
(ii) Por outro lado, recordemos as noções de consistência e de independência de uma teoria,
em linguagem moderna, resultado da evolução da teoria dos modelos para que tanto contribuíram
Hilbert, Veronese, Peano e outros: seja uma teoria numa certa linguagem L e seja uma
sentença de L. Então se existir uma dedução em que leva a concluir , escreve-se ` . é
inconsistente se existir em uma sentença tal que ` ( ∧ ¬) No caso contrário diz-se que
é consistente. Prova-se em lógica que se for uma teoria compatível (isto é, se tiver, pelo menos,
um modelo ou realização que satisfaça os seus axiomas), então é consistente.
Uma sentença é relativamente consistente com se + for consistente ou se for inconsistente, e é independente de se 0 e 0 ¬ pelo que, no caso em que é consistente,
é independente de se e só se e ¬ forem relativamente consistentes com .
3
Na verdade, um corpo, na linguagem moderna.
2.1
Introdução
33
iii) Rotação de centro no ponto = (0 0) e ângulo ∠ (onde = (1 0) e
= ( ) ) de um ponto qualquer ( ) resulta no ponto (0 0 ) dado pelo sistema
de equações
(
0 = √2+2 − √2+2
0 = √2+2 + √2+2
q
q
√
¡ ¢2
2
2
que são elementos de Ω visto que 2 + 2 = +
=
1 + ∈ Ω .
2
Assim tornou-se evidente que o modelo
M ≡ (Ω2 = {( )} {( : : )} Ω ≡Ω )
onde ≡Ω representa as três últimas transformações acima descritas, ( ) representa
os pontos do plano Ω2 ( : : ) representa as retas do plano Ω2 , verifica todos os
axiomas de incidência, ordem, congruência e o de Arquimedes. O axioma da completude não é satisfeito, pois Ω não é um corpo completo no sentido de Dedekind. No
entanto, como é conhecido desde os primórdios deste método, qualquer contradição
nas consequências dos axiomas lineares e planares I—IV, V1 tem de forçosamente ser
reconhecível na aritmética do sistema algébrico ordenado Ω Isto é: se a aritmética
de Ω for não contraditória, então a geometria do modelo M assim como qualquer
outra fundada nos axiomas I—IV, V1 é igualmente contraditória.
É claro que se for Ω = R então a geometria Ω2 é a geometria cartesiana plana ordinária, pois o axioma da completude é também satisfeito, como Hilbert faz questão
de demonstrar por redução ao absurdo: o seu argumento começa por recordar os
seguintes resultados demonstráveis na geometria da congruência:
– Todo o segmento é divisível num número ∈ N, de partes congruentes:
1
∀ ∈ Ω ∀ ∈ N ∈ Ω
– Se um segmento é menor do que um segmento , então também a
-ésima parte de é menor do que a -ésima parte de :
∀ ∈ N ⇒
Supõe em seguida, com vista a uma contradição, que existe uma reta na qual,
contrariamente ao axioma de completude, se possam juntar novos pontos aos da
geometria inicial sem que, sobre fique perturbada a validade dos axiomas I 1-2, II,
III, V 1. Seja um desses pontos novos. Ora divide em duas semirretas, cada
uma, das quais, pelo axioma de Arquimedes, contém também pontos que existiam
antes da ampliação (pontos velhos). Assim parte os pontos velhos de em duas
semirretas. Com representada na forma paramétrica
½
= +
= +
34
A Geometria Não-Arquimediana segundo Hilbert
onde o parâmetro ∈ R então, a partição gerada por , fornece um corte de
Dedekind dos valores de . Para um tal corte, tem-se: ou a primeira classe determinada por ele tem um último elemento, ou a segunda classe tem um primeiro
elemento. Seja o ponto de , correspondente ao primeiro elemento da segunda
classe. Entre e não está, portanto, nenhum ponto velho.
Por outro lado, há um ponto velho tal que está entre e . Pelo axioma de
Arquimedes, há ainda um número finito de pontos diferentes 1 2
tais que os segmentos 1 1 2 são congruentes entre si e tais que
está entre e . Divide-se então o segmento em partes congruentes. Todos
os pontos de divisão são pontos velhos; seja aquele, entre esses, que está mais
próximo de . Pelas propriedades da ordem linear e da congruência assumidas,
tem-se que o segmento é menor do que , porque é menor do que O
ponto velho está portanto entre e . A hipótese de que se pode juntar a um
ponto , sem perturbar a validade dos axiomas lineares, conduziu por consequência
a uma contradição.
Conclui-se então que a Geometria Analítica Cartesiana cumpre todos os axiomas
lineares e planos de I a V, o que se pode generalizar sem dificuldade para a geometria
do espaço. Como a aritmética do corpo dos números reais em que ela se baseia é
supostamente não contraditória, então, como qualquer outro modelo dos axiomas
I—V, a Geometria Cartesiana é não contraditória.
Finalmente Hilbert observa que, embora existindo um número infinito de geometrias que satisfazem aos axiomas I—IV, V1, apenas uma delas, a Geometria
Cartesiana, é completa no sentido de Dedekind, isto é, que satisfaz o axioma V2 de
completude.4
Depois de mostrar a consistência dos seus axiomas, Hilbert enceta a tarefa de
demonstrar a independência mútua de cada grupo de axiomas. A independência
dos grupos I, II, III e IV é estabelecida de forma rápida e elementar. Porém, tudo
muda nos Grundlagen a partir do momento em que Hilbert mostra a independência
dos axiomas de continuidade, V1 , ou axioma de Arquimedes, e V2 ou axioma da
completude. A partir daí toda a geometria dos Grundlagen é Não-Arquimediana5
O que propomos para a secção seguinte é um “passeio” pela construção dessa
Geometria Não-Arquimediana (GNA), bem como por outras que surgem através da
negação de axiomas ou de grupos de axiomas, seguindo a par e passo a emergência
4
Na realidade o processo de Hilbert é generalizável. Um modelo dos axiomas I—IV e V1 é obtido
no corpo numerável R0 de todos os números algébricos reais, em vez dos números reais. Então R0
pode ser restringido ainda mais ao seu subcorpo P0 da seguinte forma:
p
— Seja F um corpo qualquer. Uma extensão de F da forma F( 1 + 2 ) com ∈ F é dita uma
extensão pitagórica de F, e F é dito um corpo pitagórico se toda a extensão pitagórica de F coincide
com F (por exemplo R0 e R são pitagóricos).
É fácil ver que I—IV são satisfeitos na “Geometria Analítica” sobre qualquer corpo pitagórico.
Por outro lado, pode-se construir um corpo pitagórico minimal contendo um corpo dado (o fecho
pitagórico do referido corpo) da mesma maneira que se constrói o fecho algébrico de um corpo
qualquer.
O corpo P0 é definido como sendo o fecho pitagórico de Q.
5
Desenvolvendo aquilo que Poincaré designou de “parte não elementar” dos Grundlagen [50].
2.2
Geometria Não-Arquimediana de Hilbert
35
do pensamento Hilbertiano, ao longo da sua obra fundacional, os Grundlagen.
2.2
2.2.1
Geometria Não-Arquimediana de Hilbert
Um modelo analítico de GNA de Hilbert
Para a investigação das relações geométricas na GNA, Hilbert introduziu, aquilo que
denomina cálculo de segmentos, isto é, um sistema numérico Não-Arquimediano,
considerado como um sistema complexo especial 6 . Define as noções de segmento,
de adição e a multiplicação dos segmentos, bem como a razão de segmentos. Em
particular, introduz um sistema numérico Arguesiano, ou seja um sistema numérico
Não-Arquimediano, no qual a multiplicação de segmentos não é comutativa. Através
desses sistemas numéricos constrói na GNA a teoria da semelhança das figuras, a
teoria das áreas, e as outras teorias clássicas.
Por outro lado, sabe-se, desde Euclides, que a teoria das áreas dos polígonos,
que constitui a base da teoria elementar da medida das áreas das figuras no plano
Arquimediano, baseia-se na noção de equicomplementabilidade que na GNA é mais
geral que a noção de equidecomponibilidade (equivalência por decomposição em pares
de triângulos congruentes – ver definições 2.7 e 2.8).
Nos parágrafos seguintes vamos fazer uma breve visita às propostas de Hilbert
nesse âmbito.
Como vimos acima, Hilbert chama ao axioma de Arquimedes, V1 , axioma de
continuidade porque, segundo ele, “torna possível a introdução do conceito de continuidade na geometria”.7
Para provar a independência do referido axioma, Hilbert parte do corpo de
números algébricos Ω definido no número 2.1.28 , com vista a construir um novo
corpo Não-Arquimediano. A seguir toma o corpo Ω() das funções algébricas numa
variável sobre o corpo Ω (dos polinómios em ), e novamente com as cinco operações
indicadas no número 2.1.2 (onde é agora qualquer função gerada pelas cinco operações). Ω() é o corpo ordenado procurado, uma vez nele definido uma ordem total
da seguinte maneira: para duas funções e ou conforme for a função
de , = − sempre positiva ou sempre negativa para suficientemente grande.
Como para qualquer racional positivo, a função − é sempre negativa para
suficientemente grande, logo para todo o , o que demonstra que o axioma de
6
Um sistema de “números complexos” é aquilo que na linguagem moderna se chama uma álgebra
real, e um “número complexo”, uma série formal.
7
Obviamente Hilbert refere-se à continuidade à Dedekind, que assiste ao conjunto dos números
reais que, intencionalmente, quer transferir para as retas da sua geometria. Ora, como já era conhecido no seu tempo, o axioma de Arquimedes não é uma consequência dos axiomas dos restantes
grupos da geometria euclidiana. Portanto, Hilbert admite a continuidade à Dedekind (que implica
o axioma de Arquimedes) como uma propriedade intrínseca da sua geometria.
8
Embora nessa altura já tivesse conhecimento da obra de Veronese (a que se refere numa nota
de rodapé) Hilbert prefere não recorrer ao modelo de Veronese para demonstrar a independência do
axioma de Arquimedes. Para tal teria que previamente verificar se a Geometria Não-Arquimediana
de Veronese verifica os seus próprios axiomas I-IV.
36
A Geometria Não-Arquimediana segundo Hilbert
Arquimedes não é válido em Ω(), enquanto que todos os outros grupos de axiomas
(incidência, ordem e congruência) são satisfeitos. Assim acaba a demonstração da
independência do axioma de Arquimedes dos restantes axiomas9 , ao mesmo tempo
que obtém uma Geometria Não-Arquimediana, na qual são verificados todos os axiomas, com exceção do axioma de continuidade, como mostram as propriedades dos
números Ω() acima discutidas, e que pode ser representado assim:
¡
¢
M ≡ ((Ω())3 = {( )} {( : : : )} Ω() ≡Ω()
Hilbert também estudou (ou sugeriu o estudo de) o efeito do axioma de Arquimedes no carácter não-euclidiano das geometrias. Atentemo-nos a um excerto
dos seus Grundlagen sobre esta matéria:
Também são de fundamental importância as geometrias Não-Arquimedianas e ao mesmo tempo não-Euclidianas e, em particular, é do mais
alto interesse o papel que o axioma de Arquimedes desempenha na demonstração dos teoremas de Legendre. A pesquisa que, sob o meu estimulo,
M. Dehn10 empreendeu acerca deste assunto, conduziu a um completo
esclarecimento da questão. As pesquisas de M. Dehn alicerçam-se nos
axiomas I-III. Só no final do trabalho de Dehn – e para que a geometria
de Riemann (elíptica) também ficasse incluída no domínio de investigação – é que os axiomas II de ordem foram encarados duma maneira
mais geral do que no presente livro, a saber:
Quatro pontos , , , duma reta repartem-se sempre em dois
pares , e , tais que , e , são “separados” e reciprocamente. Cinco pontos sobre uma reta podem sempre designar-se por
de tal modo que o par é separado por , e por
e que o par é separado por e por , etc.
Com base nestes axiomas I-III, portanto, sem utilizar a continuidade,
M. Dehn demonstra em seguida, uma versão mais larga do segundo teorema de Legendre, teorema 39:
Se nalgum triângulo a soma dos ângulos é respetivamente maior,
igual ou menor do que dois retos, então ela é assim também em cada
triângulo.
No trabalho citado também se demonstra o seguinte complemento ao
primeiro teorema de Legendre, teorema 35:
Da hipótese de infinitas paralelas a uma reta que passem por um
ponto, não resulta, se se exclua o axioma de Arquimedes, que a soma
9
Seguindo a nota anterior, pode-se dizer que a independência de V2 é mostrada pela geometria
R0 ou pela geometria P0 .
A independência de V1 decorre da existência de corpos pitagóricos não arquimedianos: o fecho
pitagórico de qualquer corpo Não-Arquimediano (por exemplo, o corpo das funções racionais a
uma variável, sobre Q, com uma valuação não-arquimediana).
10
«Os “Teoremas de Legendre” sobre a soma dos ângulos no triângulo Math. Ann., Bd. 53,
1900.»
2.2
Geometria Não-Arquimediana de Hilbert
37
dos ângulos no triângulo seja menor do que dois retos. Mais: há por
um lado, uma geometria (a geometria Não-Legendriana) na qual por um
ponto se podem conduzir infinitas paralelas a uma reta e em que, contudo,
são válidos os teoremas da geometria de Riemann (elíptica); e há, por
outro lado, uma geometria (a geometria semi-Euclideana) na qual há
infinitas paralelas a uma reta passando por um ponto e em que, apesar
disso, são válidos os teoremas da Geometria Euclidiana.
Da hipótese de que não há paralelas resulta sempre que a soma dos
ângulos no triângulo é maior do que dois retos.
Noto finalmente que, quando se introduz o axioma de Arquimedes, o
axioma das paralelas pode ser substituído pela condição de que a soma
dos ângulos no triângulo deva ser igual a dois retos.[50]
Nas secções seguintes vamos ver como Hilbert desenvolve tópicos clássicos fundamentais da Geometria, sem recurso ao Axioma de Arquimedes, obtendo resultados
a todos os títulos surpreendentes, como por exemplo o seguinte:
– Na Geometria Não-Arquimediana existem triângulos que, respetivamente, têm
iguais medidas de altura e base, são equicomplementáveis, mas não são equidecomponíveis.[50]
2.2.2
Cálculo Não-Arquimediano das proporções
O seu objetivo é o de fundamentar a teoria das proporções de Euclides, apenas com os
axiomas I—IV. Antes de iniciar a investigação nessa matéria, Hilbert deixa claro (§13,
Grundlagen11 ) o conceito de número que vai utilizar, acabando por apresentar uma
(a primeira) axiomática para corpos ordenados Arquimedianos, isto é, isomorfos ao
corpo ordenado dos números reais. O que tem em vista é a construção de um corpo
ordenado de segmentos, isomorfo aos sistemas numéricos construídos por Cantor e
Dedekind.
O papel fundamental do teorema de Pascal nessa construção é o de permitir
a demonstração das propriedades da multiplicação de segmentos e criar o referido
corpo, sem recorrer ao axioma de Arquimedes12 . Com esse corpo de segmentos
Hilbert encontra-se armado para recriar a teoria Euclidiana das proporções13 , sem
recurso ao axioma de Arquimedes, o que constitui uma grande inovação.
O teorema fundamental da teoria das proporções é o teorema dito de Tales, com
o enunciado seguinte:
Proposição 2.1 (teorema de Tales) Se duas retas paralelas cortam, nos lados
de um ângulo, os segmentos 0 0 , a proporção : = 0 : 0 é satisfeita.
Reciprocamente, se quatro segmentos 0 0 satisfazem a proporção : = 0 : 0
11
Todas as referências aos Grundlagen reportam-se às edições portuguesas, [47], [50].
Hilbert alcança assim o objetivo, de forma simples, muito longe do método muito complexo
usado por Veronese.
13
Ou melhor, “teoria dos segmentos proporcionais”, segundo Paul Rossier [48].
12
38
A Geometria Não-Arquimediana segundo Hilbert
e são referentes aos lados de um ângulo, as retas que ligam as extremidades de e
de às de 0 e 0 são paralelas.¤
A demonstração deste teorema, dada por Euclides, baseia-se na procura de uma
parte alíquota de segmentos com o mesmo suporte; no caso dos segmentos incomensuráveis tal demonstração exige o recurso a um axioma de continuidade à Dedekind,
portanto de alguma forma ao axioma de Arquimedes [50]. O recurso ao teorema de
Pascal vai mostrar que o teorema de Tales é independente do axioma de Arquimedes.
O teorema de Pascal é um teorema da Geometria projetiva14 e é uma proposição
sobre um hexágono inscrito numa cónica15 :
Teorema 2.2 (Pascal, geral) Dado um hexágono [ ] inscrito numa có
- nica, cada um dos três pares de retas que contêm os três pares de lados opostos,
intersectam-se em pontos, , , , que estão situados sobre uma mesma reta, .¤
Fig. 5. Ilustração do teorema de Pascal. Fonte [50].
Observação: Nada obriga a que o hexágono seja regular, ou mesmo convexo. O
teorema continua válido mesmo no caso de a cónica se encontrar degenerada em duas
retas. O caso a que Hilbert recorre é aquele em que a reta que contém os pontos de
intersecção é uma reta no infinito, isto é, em que os lados opostos do hexágono são
14
Dual do teorema de Brianchon: dado um hexágono circunscrito numa cónica as rectas que
unem vértices opostos(diagonais) intersectam-se num único ponto.
15
É interessante notar que Veronese, também trabalhou com o hexagrama “místico” antes de
entrar pelos caminhos Não-Arquimedianos. Hilbert recorre ao teorema de Pascal – um teorema
sobre o hexagrama – exatamente para se livrar do axioma de Arquimedes.
2.2
Geometria Não-Arquimediana de Hilbert
39
paralelos. Nesse caso o teorema de Pascal pode ser enunciado como se segue:
Fig. 6. Ilustração do teorema de Pascal restrito. Fonte [50].
Teorema 2.3 (Pascal, restrito) Sejam 0 0 0 dois ternos de pontos
respetivamente sobre cada uma de duas retas que se intersectam num ponto distinto
de qualquer daqueles pontos; se 0 é paralelo a 0 e 0 paralelo a 0 , então
é também 0 paralelo a 0 .¤
Esta forma do teorema de Pascal era já conhecida de Papo, pelo que na maior
parte da literatura aparece associado a esse nome. Assim, doravante adotaremos,
para este resultado, a designação de “teorema de Papo-Pascal”.
Para fundamentar a sua teoria das proporções Hilbert recorre unicamente ao
caso especial do teorema de Papo-Pascal em que os pontos estão no mesmo
raio a partir de e em que se tem
≡ 0 ⇔ ≡ 0
O teorema de Papo-Pascal permite-lhe introduzir na sua geometria um sistema
algébrico ordenado de segmentos no qual são válidas todas as regras de cálculo
para os números reais. Adaptando a linguagem geométrica à numérica, através da
substituição do símbolo “≡”, de congruência, pelo símbolo “=”, usado no sistema
dos números reais, introduz a:
Definição 2.1 (Soma de segmentos, ordem) Se três pontos estão sobre
uma reta e está entre e então representa-se por = a soma dos dois
segmentos = e = e põe-se:
= +
Os segmentos e dizem-se menores que , simbolicamente
,
e diz-se maior do que e , simbolicamente
,
40
A Geometria Não-Arquimediana segundo Hilbert
Proposição 2.2 (Propriedades da soma de segmentos) Para a adição de segmentos definida acima são válidas as leis associativa
+ ( + ) = ( + ) +
e comutativa
+ = +
¤
Define, como classicamente, o produto dum segmento por um segmento ,
através da seguinte construção:
Definição 2.2 (produto de segmentos) Escolhe-se em primeiro lugar um segmento qualquer, fixo de uma vez por todas, designado por 1 . Desloca-se para um
dos lados dum ângulo reto e a partir do vértice , o segmento 1 e também a partir
de , o segmento ; em seguida desloca—se para o outro lado o segmento . Unindo
as extremidades dos segmentos 1 e por uma reta e conduzindo uma paralela a essa
reta pela extremidade do segmento, esta determinará um segmento no outro lado
do ângulo. é o produto do segmento pelo segmento e é designado por
=
¤
Nas proposições seguintes, Hilbert demonstra propriedades da multiplicação de
segmentos acima definida:
Proposição 2.3 Na multiplicação de segmentos definida em 2.2 é válida a lei
comutativa
=
Na demonstração, importante para se compreender o papel do teorema de PapoPascal nesta teoria, Hilbert diz:
Para este fim construamos primeiramente, da maneira acima indicada, o segmento . Além disso, desloquemos o segmento para o
primeiro lado do ângulo reto e o segmento para outro lado; unamos a
extremidade do segmento 1 com a extremidade do segmento , que está
no outro lado, por meio duma reta, e tracemos uma paralela a esta reta
pela extremidade de que está no primeiro lado: esta paralela determina
o segmento sobre o outro lado – e, de fato, este segmento coincide,
como mostra a figura, com o segmento anteriormente construído, em
vista do paralelismo das linha auxiliares a tracejado, paralelismo que é
consequência do teorema de Pascal. Também, reciprocamente, da lei comutativa no nosso cálculo de segmentos, resulta, como imediatamente se
verá, que, o que foi chamado o caso especial do teorema de Pascal, é se−→ −−→
guramente válido para as figuras onde as semirretas e 0 formam
um ângulo reto.[50]
2.2
Geometria Não-Arquimediana de Hilbert
41
Proposição 2.4 Na multiplicação de segmentos definida em 2.2 são válidas as leis
associativa e distributiva
() = ()
( + ) = +
Um breve exame das figuras abaixo (extraídas dos Grundlagen), basta para se
certificar da veracidade desta proposição:
Fig. 7. Ilustração da propriedade comutativa da multiplicação de segmentos.
Fonte [50].
Fig. 8. Ilustração da propriedade associativa da multiplicação de segmentos.
Fonte [50].
42
A Geometria Não-Arquimediana segundo Hilbert
Definição 2.3 (quociente de segmentos) Se e são segmentos quaisquer, então há sempre um segmento , tal que = ; este segmento a representa-se por e
chama-se quociente de por .¤
Isto acaba a construção Hilbertiana de um sistema algébrico ordenado de segmentos isomorfo ao sistema dos números reais. Nesse sistema Hilbert fundamentou
a teoria de Euclides das proporções, sem o recurso ao axioma de Arquimedes do
seguinte modo:
Definição 2.4 (proporção) Se 0 0 são quaisquer quatro segmentos, a proporção:
: = 0 : 0
é equivalente à igualdade de segmentos
0 = 0
¤
Definição 2.5 (semelhança de triângulos) Dois triângulos dizem-se semelhantes
quando os seus ângulos se podem fazer corresponder de tal modo que, ângulos correspondentes sejam congruentes.
Teorema 2.4 Se e 0 0 são lados correspondentes em dois triângulos semelhantes, então tem-se a proporção
: = 0 : 0
Corolário 2.1 (Teorema fundamental da teoria das proporções (Tales)) Se
duas paralelas intersectam os lados dum ângulo qualquer nos segmentos 0 0 ,
respetivamente, então é válida a proporção
: = 0 : 0
Reciprocamente, se quatro segmentos 0 0 verificam esta proporção, e 0 e 0
são dois a dois deslocados para cada um dos lados dum ângulo qualquer, então as
retas que unem os pontos extremidades de e 0 0 , respetivamente, são paralelas
entre si.¤
2.2.3
O modelo geral de Geometria Analítica Não-Arquimediana
de Hilbert
Ao sistema de segmentos considerado, Hilbert associa um sistema de segmentos
orientados, do seguinte modo: escolhe na reta ordenada um sentido positivo e um
sentido negativo; ao segmento associa um segmento , quando ficar no sentido
2.2
Geometria Não-Arquimediana de Hilbert
43
positivo a partir de , e no caso contrário associa a −; um ponto qualquer é
designado o segmento 0. O segmento diz-se positivo quando for maior do que 0,
0; o segmento − diz-se negativo quando menor do que 0, − 0.
Obtém uma extensão do cálculo de segmentos onde são válidas todas as regras
de cálculo para os números reais. Em particular, tem-se
Proposição 2.5 i) 1 = 1 − = e 0 = 0 = 0
ii) Se = 0, então é, ou = 0, ou = 0.
iii) Se e 0, então resulta sempre .
iv) Se 1 2 3 − são pontos numa reta, então a soma dos segmentos 1 2 , 2 3 , , −1 , 1 é igual a 0.
Com o objetivo de representar analiticamente uma reta num plano Cartesiano,
constrói um sistema de eixos ortogonais, num plano , com duas retas perpendiculares entre si passando por . Cada ponto do plano é univocamente determinado
pelas suas coordenadas que podem ser segmentos positivos, negativos ou 0.
Seja uma qualquer reta do plano , passando por e por um ponto com
as coordenadas e sejam as coordenadas dum ponto qualquer de . Então
encontra-se facilmente, a partir do teorema 2.1, como equação da reta ,
: = :
ou
− = 0
Se 0 , for uma paralela a que intersecta no eixo dos o segmento , então
obtém-se a equação da reta 0 , substituindo o segmento pelo segmento − na
equação da reta ; a equação desejada é portanto
− − = 0
A partir destas considerações conclui, independentemente do axioma de Arquimedes, que
Proposição 2.6 Toda a reta num plano, representa-se por uma equação linear nas
coordenadas , e reciprocamente, que toda a equação linear representa uma reta,
sendo os coeficientes segmentos considerados na geometria em questão.
Para obter a geometria analítica Euclidiana usual, é porém necessário introduzir
o axioma de Arquimedes. Nesse caso, pode-se fazer corresponder aos pontos duma
reta qualquer no espaço, números reais, da seguinte maneira, indicada por Hilbert:
[...] escolhe-se sobre a reta dois pontos quaisquer a que se fazem
corresponder os números 0 e 1, definindo assim um segmento unitário;
depois dividindo ao meio o segmento 01 e designando o ponto médio
correspondente por 12 , em seguida o ponto médio do segmento 12 por 14
44
A Geometria Não-Arquimediana segundo Hilbert
etc. ; depois de ter usado vezes este processo, chega-se a um ponto
a que corresponde o número 21 . Desloquemos, agora, o segmento 21
partindo do ponto , quer para o lado do ponto 1 quer para o outro
lado, por exemplo, vezes, e demos aos pontos que se obtêm os valores
numéricos 2 e ,− 2 respetivamente.[50]
A partir do axioma de Arquimedes pode-se facilmente concluir (com base nesta
correspondência) que
Proposição 2.7 A qualquer ponto da reta se pode fazer corresponder um número
real, duma maneira unívoca, e de tal modo que esta correspondência tenha a seguinte
propriedade: se são três pontos quaisquer da reta e , os correspondentes números reais e se está entre e , então estes números satisfazem ou à
desigualdade ou a .
A recíproca desta proposição, isto é, se a todo o número real também corresponde
um ponto da geometria, não é verdadeira, pois depende de ser ou não válido o axioma
de completude V2, na geometria em questão.
Pelo contrário,
Se numa geometria só se supõe a validade do axioma de Arquimedes,
então é sempre possível ampliar o sistema de pontos, retas e planos por
meio de elementos «irracionais», de modo que para cada reta da geometria resultante, a cada sistema de três números reais satisfazendo à
equação dessa reta corresponda, sem exceção, um ponto.[50]
Isto é, trata-se duma geometria incompleta, no sentido de Dedekind. Uma geometria que verifique o axioma de completude de Dedekind é isomorfa à geometria
cartesiana real:
Proposição 2.8 A Geometria Analítica Cartesiana usual é única, a menos de
isomorfismos.¤
2.2.4
Aplicação: teoria Não-Arquimediana de áreas planas
Após a introdução de uma teoria Não-Arquimediana de segmentos proporcionais,
fundada nos axiomas I 1-3 e II-IV, Hilbert propõe um estudo das áreas planas,
fundado nos mesmos axiomas. A teoria proposta é também “uma das mais notáveis
aplicações do teorema de Papo-Pascal na geometria elementar” [50].
São fundamentais as definições seguintes:
Definição 2.6 (decomposição de um polígono) Unindo dois pontos dum polígono simples por uma poligonal qualquer que exista toda no interior do polígono
e não contenha nenhum ponto duplo, obtêm-se dois novos polígonos simples 1 e 2
cujos pontos interiores estão todos no interior de . Diz-se que está decomposto
em 1 e 2 ou 1 e 2 compõem .
2.2
Geometria Não-Arquimediana de Hilbert
45
Definição 2.7 (equidecomponibilidade) Dois polígonos simples dizem-se equidecomponíveis, quando se podem decompor num número finito de triângulos congruentes entre si, dois a dois.
Definição 2.8 (equicomplementabilidade) Dois polígonos simples e dizemse equicomplementáveis quando se puder juntar-lhes um número finito de polígonos
equidecomponíveis dois a dois 0 0 ; 00 00 ; 000 000 de modo que os dois polígonos + 0 + 00 + + 000 e + 0 + 00 + + 000 desse modo compostos, sejam
equidecomponíveis entre si.
Destas definições resulta imediatamente:
Proposição 2.9 Por composição de polígonos equidecomponíveis resultam ainda
polígonos equidecomponíveis, e quando de polígonos equidecomponíveis se retiram
polígonos equidecomponíveis então os polígonos restantes são equicomplementáveis.¤
Além disso, tem-se:
Proposição 2.10 Se dois polígonos 1 , e 2 são equidecomponíveis com um terceiro
polígono 3 então 1 , e 2 são equidecomponíveis entre si.¤
Proposição 2.11 Se dois polígonos são equicomplementáveis com um terceiro, então são equicomplementáveis entre si.¤
Isto é, as relações de equidecomponibilidade e de equicomplementabilidade são
relações de equivalência.
Definindo de maneira usual, as noções de retângulo, base e altura dum paralelogramo, base e altura dum triângulo, tem-se:
Proposição 2.12 Dois paralelogramos com a mesma base e a mesma altura são
equicomplementáveis.¤
Fig. 9. Todo o triângulo 4 é sempre equidecomponível com um
paralelogramo com a mesma base e metade da altura.
Fonte [50].
46
A Geometria Não-Arquimediana segundo Hilbert
Além disso, é válida a conhecida proposição:
Proposição 2.13 Todo o triângulo 4 é sempre equidecomponível com um paralelogramo com a mesma base e metade da altura.¤
Teorema 2.5 (fundamental da teoria das áreas planas, ⇒) Dois triângulos com
a mesma base e com mesma altura são equicomplementáveis.
Dem. resulta imediatamente dos teoremas 2.12 e 2.13, e com a intervenção do
teorema 2.10.¤
Como é sabido desde Euclides, mostra-se facilmente, que
Proposição 2.14 Dois paralelogramos e, portanto, (pelas proposições anteriores)
também dois triângulos, com as mesmas bases e mesmas alturas são sempre equidecomponíveis.¤
A demonstração é feita em Euclides[43]. Note-se porém que a demonstração
não é possível sem a utilização do axioma de Arquimedes. Na verdade, tem lugar a
seguinte
Proposição 2.15 Em todo o modelo de Geometria Não-Arquimediana, existem
triângulos possuindo a mesma base e a mesma altura que ( pelo teorema 2.5, são
equicomplementáveis e que não são equidecomponíveis.
Vejamos a demonstração de Hilbert:
De fato desloquem-se, numa Geometria Não-Arquimediana, para uma
semirreta dois segmentos = e = , para os quais não haja
nenhum número inteiro que satisfaça à relação:
≥
Das extremidades do segmento levantem-se as perpendiculares
e 0 de comprimento . Os triângulos 4 e 4 0 são, pelo
teorema 2.5, equidecomponíveis por ampliação. Do teorema 23 [50]16 resulta que a soma de dois lados dum triângulo é maior do que o terceiro
lado, entendendo-se a soma de dois lados no sentido do cálculo de segmentos introduzido no capitulo terceiro.
Portanto é + = 2. Além disso pode demonstrar-se a
seguinte proposição sem usar a continuidade:
– Um segmento que fique completamente no interior dum triângulo
é menor do que o maior dos seus lados.
Por consequência, cada segmento que esteja no interior do triângulo
4 é menor do que 2.
16
“Em todo o triângulo, ao maior lado está oposto o maior ângulo”.
2.2
Geometria Não-Arquimediana de Hilbert
47
Suponhamos agora que seja dada uma decomposição dos triângulos
4 e 4 0 num número finito de partes, por exemplo cada um
em triângulos, congruentes entre si dois a dois. Cada lado dum triângulo parcial utilizado na decomposição do triângulo 4 está ou no
triângulo 4 ou sobre um dos seus lados, isto é, é menor do que
2 O perímetro de cada triângulo parcial é portanto menor do que 6; a
soma de todos estes perímetros é portanto menor do que 6. As decomposições dos triângulos 4 o 4 0 devem dar o mesmo perímetro
soma, e, por isso, a soma dos perímetros dos triângulos parciais utilizados na decomposição do triângulo 4 0 deve ser menor do que 6.
Porém, nesta soma está com certeza, completamente compreendido o
lado 0 , isto é, deve ser 0 6 e daqui e pelo teorema 23 [50]
tem-se: 6. Isto contradiz a nossa hipótese relativa aos segmentos
e . A hipótese da possibilidade duma decomposição dos triângulos parciais congruentes entre si conduziu-nos, portanto a um contradição.[50]
Os teoremas sobre a equicomplementabilidade da geometria elementar são corolários
dos resultados acima.
Exemplo 2.1 Tem-se, em particular, o teorema de Pitágoras:
Fig. 10. Teorema de Pitágoras.
Fonte: Autor.
Proposição 2.16 Para um dado triângulo (e portanto também para todo o polígono simples) pode-se sempre construir um triângulo retângulo que possui um cateto
unidade e que é equicomplementável com o triângulo (com o polígono).¤
Teorema 2.6 (fundamental da teoria das áreas planas, ⇐) Se dois triângulos equicomplementáveis tem bases iguais, então têm também alturas iguais.¤
48
A Geometria Não-Arquimediana segundo Hilbert
Este teorema fundamental, encontra-se no primeiro livro de Euclides como o 39.
teorema; entretanto, para a sua demonstração, Euclides faz apelo ao postulado geral
sobre grandezas:
“O todo é maior do que uma sua parte”
um método que implica a introdução dum novo axioma geométrico sobre equicomplementabilidade.
Ora, sem um tal novo axioma, Hilbert consegue estabelecer o teorema 2.6 e
por consequência a teoria das áreas planas, seguindo o mesmo caminho, isto é,
unicamente com o auxílio dos axiomas do plano e sem utilização do axioma de
Arquimedes. Para analisar isto, temos necessidade da noção de medida de área, a
começar por uma noção de área de um triângulo.
←→
Definição 2.9 (orientação) Numa geometria plana uma reta divide os pontos
que não estão sobre ela em dois conjuntos de pontos: um destes conjuntos é desig−→
nado por “à direita da semirreta ” que parte de ou do «segmento orientado
−→
» e o “à esquerda da semirreta ” que parte de , ou do «segmento orien−→
tado », o outro domínio o à esquerda da semirreta e à direita da semirreta
−→
. Relativamente a dois segmentos orientados e , o mesmo domínio estará
situado “à direita”, quando e estiverem na mesma semirreta que parte de (e
reciprocamente). Se para uma semirreta , partindo dum ponto , foi já definido
o domínio à direita, o uma semirreta partindo de percorre este domínio, então
diz-se que o domínio relativo a que contém , é à esquerda de .
−→
Reconhece-se que deste modo, partindo de uma determinada semirreta , ficam
univocamente determinados os lados direito e esquerdo em relação a toda a semirreta,
ou a todo o segmento, isto é, fica determinada uma orientação.
Definição 2.10 (orientação de um triângulo) Os pontos do interior dum triângulo 4 estão, ou à esquerda dos lados , , ou à esquerda de ,
, . No primeiro caso diz-se: (respetivamente , ) é o sentido
positivo e (respetivamente , ) o sentido negativo do triângulo; no
último caso diz-se: é o sentido positivo e o sentido negativo do triângulo.
Quando num triângulo 4 de lados se constroem as duas alturas =
, = , resulta da semelhança dos triângulos 4 e 4 e pelo
teorema 2.4, a proporção:
: = :
isto é:
= ;
por consequência,
Proposição 2.17 Em todo o triângulo, o produto duma base pela altura correspondente é independente do lado escolhido como base no triângulo.¤
2.2
Geometria Não-Arquimediana de Hilbert
49
A metade do produto da base pela altura dum triângulo 4 é portanto, um
segmento característico do triângulo 4. A este segmento característico dá-se
um nome, conforme a definição seguinte:
Definição 2.11 (área de um triângulo) Seja, no triângulo 4 o sentido
o positivo. O segmento positivo (+) chama-se medida de área do triângulo 4 percorrido no sentido positivo e é designada por []; o segmento
negativo (−) chama-se a medida de área do triângulo 4 percorrido no sentido
negativo e é designada por [].
Tem-se então o teorema muito simples:
Proposição 2.18 Se um ponto está no exterior dum triângulo 4, então
têm-se para a medida de área do triângulo a relação
[] = [] + [] + []
¤
Teorema 2.7 Se um triângulo 4 é decomposto, de qualquer maneira, num
número finito de triângulos ∆ , então a medida da área do triângulo 4, percorrido no sentido positivo, é igual à soma das medidas das áreas de todos os triângulos
∆ , percorridos no sentido positivo.¤
Proposição 2.19 A medida de área [ ] dum polígono simples é independente do
modo de decomposição em triângulos e por consequência é determinada univocamente pelo polígono.¤
Tem-se então a
Definição 2.12 A medida de área [ ] dum polígono simples, percorrido no sentido
positivo, é a soma das medidas das áreas de todos os triângulos percorridos no sentido
positivo, que se obtêm por uma determinada decomposição do polígono.¤
Desta definição obtém-se, recorrendo ao teorema 2.7, a proposição:
Proposição 2.20 Polígonos equidecomponíveis têm a mesma medida de área.¤
Deve-se sempre entender por medida de área a que se refere ao sentido positivo
de percurso.
Proposição 2.21 Polígonos equicomplementáveis têm a mesma medida de área.¤
50
A Geometria Não-Arquimediana segundo Hilbert
Com efeito[50], se e são polígonos equicomplementáveis, então, por definição,
devem existir polígonos equidecomponíveis dois a dois 0 0 ; ; 00 00 , tais que,
juntando por um lado 0 00 num polígono + 0 + + 00 e por outro lado
0 00 num polígono +0 ++00 , estes dois últimos são equidecomponíveis.
Das igualdades:
[ + 0 + + 00 ] = [ + 0 + + 00 ]
[ 0 ] = [0 ]
..
.
00
[ ] = [00 ]
conclui-se facilmente :
[ ] = []
Desta proposição deduz-se imediatamente a demonstração do teorema fundamental do cálculo das áreas planas (⇐). Com efeito, designando as bases iguais
dos dois triângulos por , as alturas correspondentes por e 0 , respetivamente,
conclui-se da suposta equicomplementabilidade dos dois triângulos, que devem ter
a mesma medida de área, isto é, que
1
1
= 0 ⇔ = 0
2
2
que é a tese do teorema 2.6.
Tem-se também a
Proposição 2.22 Polígonos com a mesma medida de área são equicomplementáveis.¤
Resulta então das duas últimas proposições o
Teorema 2.8 Dois polígonos equicomplementáveis têm sempre a mesma medida de
área e dois polígonos com a mesma medida de área são sempre equicomplementáveis.¤
Exemplo 2.2 Em particular, em dois retângulos equidecomponíveis por ampliação
e com um mesmo lado, os outros lados são também iguais.¤
Também tem-se o teorema:
Teorema 2.9 Se se decompõe um retângulo, por meio de retas, em vários triângulos
e tirarmos um só que seja destes triângulos, então não se pode, com os restantes
triângulos, preencher o retângulo.¤
2.2
Geometria Não-Arquimediana de Hilbert
2.2.5
51
Geometria Não-Arquimediana Não-Pascaliana
Com vista a demonstrar o significado do teorema de Desargues no contexto da sua
construção axiomática, Hilbert introduz um cálculo de segmentos, sem recorrer aos
axiomas de congruência e baseando-se nesse teorema. Parte de uma geometria plana
na qual são válidos os axiomas I1-3, II, IV* ([50],§24), isto é, todo os axiomas lineares
e planos com exceção dos axiomas de congruência e continuidade, e introduz nesta
geometria, independentemente dos axiomas de congruência e de continuidade, um
novo cálculo de segmentos, da seguinte maneira:
Toma-se no plano duas retas fixas que se intersectam num ponto , calcula-se,
com os segmentos cujos pontos origem sejam e cujas extremidades estejam sobre
uma destas duas retas fixas. Considera-se o ponto como o segmento 0, ficando
= 0 ou 0 = .
Sejam e 0 pontos determinados sobre as retas fixas que se intersectam em ;
então chama-se aos dois segmentos e 0 segmentos unitários:
= 0 = 1 ∨ 1 = = 0
←−→
À reta 0 chama-se a reta-unidade. Além disso, se e 0 forem pontos,
←→
←−→
←→ ←−→
respetivamente sobre as retas e 0 , e se 0 k 0 , então diz-se que os
segmentos e 0 são iguais.
Para se definir a soma dos segmentos = e = , que estão sobre
←−→
←→
←→
, constrói-se 0 , paralela à reta unidade 0 e conduz-se depois, por 0 , uma
←→
←→
paralela a e por uma paralela a . Essas duas paralelas intersectam-se
←−→
num ponto 00 . Finalmente conduza-se por 00 uma paralela à reta unidade 0 ;
←→ ←−→
esta encontra as retas fixas e 0 nos pontos e 0 ; então a = = 0
chama-se a soma do segmento = com o segmento = .
A seguir Hilbert mostra que nessa álgebra de segmentos são válidas todas as propriedades dum corpo ordenado, exceto a propriedade comutativa da multiplicação,
bem como os teoremas de continuidade. A este sistema de números ele chama sistema de números Arguesianos.
Num sistema de números Arguesianos, Hilbert constrói uma geometria do
espaço, na qual são válidos todos os axiomas I, II e o
Axioma 2.1 IV* (Axioma das paralelas na forma forte) Seja uma reta e um
ponto fora de : então há no plano determinado por e uma e uma só reta que
passa por e não corta .
Para tal, considera cada elemento do conjunto {( ) : ∈ } como um
ponto, e as listas ( : : : ) ∈ 4 , no qual os três primeiros números não são
iguais a 0, como um plano, com a condição de que os sistemas ( : : : ) e
( : : : ) (0 6= ∈ ) representem o mesmo plano. A equação
+ + + = 0
52
A Geometria Não-Arquimediana segundo Hilbert
exprime que o ponto ( ) está no plano ( : : : ) . A reta é definida através
da intersecção de dois planos (0 : 0 : 0 : 0 ) e (00 : 00 : 00 : 00 ), onde não existe
6= 0, tal que:
= = =
Tem-se que
( ) ∈ [(0 : 0 : 0 : 0 ) (00 : 00 : 00 : 00 )] ⇔
⇔ ( ) ∈ (0 : 0 : 0 : 0 ) ∩ (0 : 00 : 00 : 00 )
Por construção de , é evidente que são válidos todos os axiomas I e IV*. Para
que os axiomas, de ordem, sejam também satisfeitos Hilbert define a seguinte ordem:
Definição 2.13 (entre) Sejam (1 1 1 ), (2 2 2 ), (3 3 3 ) três pontos quaisquer duma reta [( : 0 : 0 : 0 ) (00 : 00 : 00 : 00 )] Então o ponto (2 2 2 ) está
entre os outros dois, quando pelo menos uma das seis seguintes duplas desigualdades
é verificada:
(1) 1 2 3 1 2 3 ;
(2) 1 2 3 1 2 3 ;
(3) 1 2 3 1 2 3
Das equações:
0 + 0 + 0 + 0 = 0
00 + 00 + 00 + 00 = 0 ( = 1 2 3)
deriva-se, por multiplicação à esquerda por números apropriados de , diferentes
de 0, e depois por adição das igualdades correspondentes, um sistema de igualdades
da forma
(4) 000 + 000 + 000 + 000 = 0 ( = 1 2 3)
Aqui o coeficiente 000 não é, com certeza, 0, visto que, de contrário, ter-se-ia a
igualdade dos três números 1 2 3 . No caso em que 000 = 0, então tem-se
1 = 2 = 3
Mas se é 000 6= 0, então conclui-se a partir de
1 ≶ 2 ≶ 3
as outras duplas desigualdades
000 1 ≶ 000 2 ≶ 000 3
e por consequência, em vista de (4)
000 1 + 000 ≶ 000 2 + 000 ≶ 000 3 + 000
2.2
Geometria Não-Arquimediana de Hilbert
donde
e como 000 6= 0, tem-se
53
000 1 ≶ 000 2 ≶ 000 3
1 ≶ 2 ≶ 3 ;
devendo em cada uma destas duplas desigualdades ser válido sempre ou o sinal
superior ou o sinal inferior.
Das considerações desenvolvidas pode-se reconhecer que, nesta geometria, se têm
os axiomas II1—3.
Para mostrar que nesta geometria também é válido o axioma II4, do plano,
Hilbert considera um plano ( : : : ) e nele uma reta [( : : : ) (0 : 0 :
0 : 0 )]. Convenciona que todos os pontos ( ) existentes no plano ( : : : ),
para os quais a expressão 0 + 0 + + , se torna menor ou maior que 0, devem
estar situados, respetivamente, dum ou de outro lado daquela reta; esta convenção
é claramente uma bijeção.
Assim os axiomas I, II, IV* são todos válidos na geometria do espaço que provém,
do modo acima descrito, do sistema de números de Desargues, .
Visto que, o teorema de Desargues é uma consequência dos axiomas I1—8, II,
IV*, reconhece-se que:
Teorema 2.10 A partir dum sistema de números Arguesianos, , pode-se construir
uma geometria plana na qual os números do sistema constituem os elementos dum
cálculo de segmentos, introduzido como acima, e no qual os axiomas I1—3, II, IV*
são verificados; numa tal geometria plana é então sempre válido também o teorema
de Desargues.¤
Este teorema é recíproco do seguinte resultado:
Teorema 2.11 Numa geometria plana na qual, além dos axiomas I1—3, II, IV*,
seja válido também o teorema de Desargues, pode-se introduzir um cálculo Arguesiano de segmentos; os elementos deste cálculo de segmentos constituem então, depois da definição de ordem, um sistema de números de Arguesianos.¤
Considere-se agora o conjunto dos segmentos como um sistema algébrico ordenado e construa-se a partir deles , de acordo com o acima exposto, uma geometria
do espaço na qual sejam válidos todos os axiomas I, II, IV*. Tem-se o
Teorema 2.12 Se numa geometria plana são verificados os axiomas I1—3, II, IV*,
então a validade do teorema de Desargues é condição necessária e suficiente para
que esta geometria plana se possa considerar como uma parte duma geometria do
espaço, na qual sejam verificados todos os axiomas I,II,IV*.¤
Assim o teorema do Desargues para a geometria plana caracteriza-se como o
resultado da eliminação dos axiomas do espaço.
Destes resultados pode-se reconhecer que
54
A Geometria Não-Arquimediana segundo Hilbert
– Toda geometria do espaço, na qual são verificados os axiomas I, II, IV*, podese sempre considerar como uma parte duma «geometria a um número qualquer de
dimensões»;
Têm-se os seguintes resultados essenciais:
Teorema 2.13 Num sistema Arquimediano de números, a propriedade comutativa
da multiplicação é uma consequência necessária das restantes leis de cálculo. Num
sistema Não-Arquimediano de números, a propriedade comutativa da multiplicação
não é uma consequência necessária das restantes leis de cálculo.¤
Dem. Sejam um parâmetro e uma expressão qualquer, com um número finito
de termos, da forma
= 0 + 1 (+1) + 2 (+2) + 3 (+3) + ;
onde 0 (6= 0) 1 2 designam números racionais quaisquer e um número inteiro
racional qualquer. Acrescente-se ao conjunto destas expressões o número 0. Duas
expressões da forma dir-se-ão iguais, se todos os números 0 1 2 são nelas
respetivamente iguais. Além disso, sejam um outro parâmetro e uma expressão
qualquer, com um número finito ou infinito de termos, da forma
= 0 + (+1) 1 + (+2) 2 + ;
onde 0 (6= 0) 1 2 designam expressões quaisquer da forma , e é ainda um
número inteiro, racional qualquer.
O conjunto de todas as expressões da forma , acrescentado também com o
número 0, é um corpo ordenado Ω( ), onde se convencionam as seguintes regras de
cálculo: primeiramente calcule-se com os próprios parâmetros e segundo as regras
de corpo comutativo, excetuando-se a propriedade comutativa da multiplicação, que
deve ser substituída pela seguinte fórmula:
(1) = 2
Sejam agora 0 , 00 duas expressões quaisquer da forma :
0
0
0
0
0
0
0 = 0 + 1 + 2 +
00
00
00
00
00
00
00 = 0 + 1 + 2 +
então pode-se evidentemente, por adição termo a termo, formar uma nova expressão
0 + 00 que é ainda da forma ; esta expressão 0 + 00 é a soma dos números
representados por e 00 .
Pela multiplicação formal, usual, termo a termo, das duas, expressões, chega-se
à expressão
0
00
0
00
0
00
0
00
0
= 0 0 + ( 0
0
0
00
+( 0
+2
00
0
+1
00
0
00
0
00
1 + +1 1 0 ) +
0
00
2 + +1 1
+1
00
0
0
00
00
1 + +2 2 0 ) +
2.2
Geometria Não-Arquimediana de Hilbert
55
Usando a fórmula (1) vê-se que esta expressão é da forma , que será designada
por produto do número 0 pelo número 00 . Com esta forma de calcular reconhece-se
imediatamente a validade das regras de cálculo num corpo comutativo. Para este
fim, tomem-se
0
0
0
0
0
0
0 = 0 + 1 + 2 +
e
0000
0000
0000
0000
0000
0000
0000 = 0 + 1 + 2 +
como expressões dadas da forma , e suponha-se que o primeiro coeficiente 0 de 0
é diferente de 0. Comparando agora as mesmas potências de nos dois membros
duma equação:
00
0000
(2) 0 =
encontra-se primeiro um número inteiro 00 , como expoente, e em seguida por ordem,
expressões
00
00
00
0 1 2
tais que a expressão
00
00
00
00
00
00
00
= 0 + 1 + 2 +
satisfaz, usando a fórmula (1), à equação (2). Analogamente quanto a uma equação
00 0 = 0000
concluindo a demonstração.
Finalmente, para encontrar uma ordenação dos números do sistema Ω( ),
Hilbert estabelece as seguintes convenções: um número do sistema diz-se ou 0,
se na expressão , que ele representa, o primeiro coeficiente 0 , de 0 é ou 0.
Sejam dados dois números quaisquer e do sistema algébrico ordenado Ω( ).
Então diz-se que , quando for, respetivamente, − 0 ou 0.
Vê-se imediatamente que, com estas convenções, também são válidas as regras de
compatibilidade com a ordem num corpo ordenado, isto é, que Ω( ) é um corpo
de números de Arguesianos.
A lei comutativa da multiplicação não é verificada, no corpo ordenado Ω( ),
como mostra a equação (1), e assim se reconhece completamente a validade do
teorema 2.13. É claro que o axioma de Arquimedes não é válido para este sistema
de números Ω( ).
Se numa geometria do espaço são verificados todos os axiomas I, II, IV*, então
tem-se também o teorema de Desargues e, por consequência, é possível e para cada
par de retas concorrentes, a introdução nesta geometria dum cálculo de segmentos
para o qual são válidas as leis de corpo ordenado.
Suponha-se agora nessa geometria, o axioma de Arquimedes, e por consequência,
também a lei comutativa da multiplicação. Vê-se imediatamente que, a lei comutativa da multiplicação não significa outra coisa senão o teorema de Pascal para os
dois eixos. Assim fica provado que o teorema de Pascal não é demonstrável com
exclusão dos axiomas de congruência e recorrendo ao axioma de Arquimedes.
56
A Geometria Não-Arquimediana segundo Hilbert
Para demonstrar que o teorema de Pascal não é demonstrável com exclusão
dos axiomas de congruência e do axioma de Arquimedes, considere-se o corpo de
números Arguesiano Ω( ) , apresentado, e construa-se com o seu auxílio, e da
maneira acima descrita, uma geometria do espaço na qual seriam válidos todos os
axiomas I, II, IV*. Apesar disso, não é válido nesta geometria, o teorema de Pascal,
visto que a lei comutativa da multiplicação não subsiste no sistema de números
Arguesiano Ω( ) . A Geometria «Não-Pascaliana», assim construída é, de acordo
com o acima referido, necessariamente ao mesmo tempo também uma Geometria
Não-Arquimediana.
2.3
Conclusões
Como principais resultados deste capítulo, podemos afirmar que a realização do
modelo numérico dos grupos de axiomas de incidência, ordem, congruência e paralelismo demonstra a independência dos axiomas de continuidade, como também a
própria não contradição da Geometria Não-Arquimediana. Por outro lado, revela o
papel dos axiomas de continuidade na construção da Geometria Euclidiana, sobre
a base dos axiomas de Hilbert. Em particular, sem os axiomas de continuidade é
impossível demonstrar a equivalência do axioma Euclidiano do paralelismo com a
proposição de que a soma dos ângulos internos de qualquer triângulo é igual a dois
retos.
Por outro lado, evidenciaram-se resultados surpreendentes. Por exemplo, na
GNA existem triângulos 4 e 40 0 0 que, respetivamente, têm iguais medidas de altura e base, são equicomplementáveis, mas não equidecomponíveis. Temse que na GNA os polígonos equicomplementáveis têm igual medida de área, e
dois polígonos com igual área são sempre equicomplementáveis. Para os triângulos
retângulos na GNA tem lugar o teorema de Pitágoras, que é um resultado sobre
equidecomponibilidade.
Através do cálculo de segmentos num espaço Não-Arquimediano pode-se introduzir um sistema de coordenadas afins (ou projetivas). Por exemplo no plano
escolhem-se duas retas, isto é, os eixos de coordenadas, que passam por um ponto
fixado, e em cada uma delas se marcam segmentos unitários. Neste sistema de coordenadas afins a equação da reta é linear, ou seja, tem a forma + + = 0, onde
e são números (segmentos) que determinam as coordenadas dos pontos na reta,
, e números (segmentos) fixados. Além disso, a multiplicação dos segmentos
dados por segmentos e é sempre possível à esquerda e, regra geral, a equação
+ + = 0 neste sistema de coordenadas não representa uma reta.
O sistema de proposições geométricas que compõem a GNA pode ser realizado no
modelo de um conjunto finito de objetos principais: “ponto”, “reta”, etc., não sendo
necessariamente verdade que em cada reta existe um número infinito de pontos.
A construção dos modelos numéricos conduz na GNA aos espaços transfinitos de
Hilbert (Não-Arquimedianos).
A realização numérica da GNA, na qual a lei comutativa da multiplicação não é
2.3
Conclusões
57
necessária, também desempenha um papel significativo na construção da chamada
Geometria Não-Pascaliana (GNP).
58
A Geometria Não-Arquimediana segundo Hilbert
CAPÍTULO 3
A Geometria Não-Arquimediana
segundo Veronese
3.1
Introdução
Veronese foi o primeiro geómetra a construir geometrias (sintética e analítica), com
a não assunção expressa do axioma de Arquimedes. Para esse estudo, a sua obra
de referência são os Fondamenti [72], uma obra de difícil leitura e análise, quer pelo
estilo próprio do autor – com muitas preocupações filosóficas e didáticas, quer por
se tratar de uma proposta bastante ambiciosa: fundamentos da geometria a muitas
dimensões e muitas espécies de unidades retilíneas, expostos de forma elementar.
Reconhecendo limitações nas obras aparecidas até então, Veronese pretende portanto fundamentar a geometria, o que não é tarefa fácil nem elementar pois trata-se
de construir axiomas coerentes, completos e não contraditórios do ponto de vista
lógico. Por outro lado Veronese pretende que a sua fundamentação abarque a geometria multidimensional, o que constitui um desafio maior em relação à coerência dos
axiomas. Ele é obrigado a partir para a geometria projetiva, o que dificulta ainda
mais a tarefa. Mas o que de fato mais caracteriza a obra e o obriga a fazer uma introdução que toma quase um terço da longa obra, é o fato de pretender fundamentar a
geometria a várias unidades retilíneas, isto é, a várias escalas. Esse programa obriga
Veronese a partir para uma investigação sobre o contínuo, a abandona o axioma
de Arquimedes e entra no mundo dos infinitos atuais. Cria um conjunto numérico
não Arquimediano, multiescala e estuda os grandes cardinais. Estabelece o contínuo
não Arquimediano. É obrigado a entrar em argumentos filosóficos sobre a ontologia
dos entes numéricos e geométricos que investiga. Finalmente, para encarar o desafio
da elementaridade defende acerrimamente a abordagem sintética e adota uma linguagem muito próxima da linguagem corrente, daí advindo muitos problemas em
relação ao rigor. Ao estudar os Fondamenti todos esses aspetos ficam evidentes.
Munidos desse quadro consegue-se estudar a obra de Veronese e nela encontrar os
vários e inusitados mundos que propõe.
Nesta introdução pretendemos, com vista a facilitar o acompanhamento da análise
mais pormenorizada que fazemos nas secções seguintes, situar as ideias de Veronese
59
60
A Geometria Não-Arquimediana segundo Veronese
em duas sub-secções: uma com uma tentativa de dissecação do pensamento do autor em relação ao contínuo1 ; outra com um resumo das principais ideias contidas na
parte introdutória dos Fondamenti, onde Veronese constrói a estrutura que está na
base da sua álgebra e da sua geometria: a forma fundamental.
Para se compreender o ponto de partida da conceção veronesiana da Geometria,
bem como o método que utilizou, vale a pena rever os conceitos de contínuo empírico 2 e de contínuo matemático, assim como a passagem do primeiro ao segundo.
Nos seus Fondamenti (Prefácio), bem como noutros textos3 , Veronese torna claras
as suas conceções:
O que é o contínuo? Esta é uma palavra cujo sentido compreendemos
mesmo sem nenhuma definição matemática, visto que intuímos o contínuo na sua forma mais simples como a característica comum a muitas
coisas concretas, como, por exemplo, para dar alguns dos mais simples,
o tempo e o lugar ocupado na vizinhança externa do objeto esboçado aqui
(figura abaixo),
Fig. 11. O contínuo Veronesiano. Fonte [72].
ou pela linha de uma caneta, se desprezarmos as suas propriedades
físicas e a sua espessura (no sentido empírico4 ). Observando as características particulares deste contínuo intuitivo, devemos aproximarmonos de uma definição abstrata do contínuo na qual, a sua intuição, ou a
representação percepcionada, não entra como parte necessária, de tal
modo que, reciprocamente, esta definição possa servir abstratamente,
com completo rigor lógico, para a dedução de outras propriedades deste
contínuo intuitivo. Veremos mais adiante que esta definição abstrata
pode ser dada matematicamente. Por outro lado, se a definição do
contínuo não for meramente nominal5 e quisermos que ela, em vez de
corresponder à (definição) intuitiva, advenha de investigações sobre a
1
Ver [31] Apêndice 4 para mais desenvolvimentos.
Que Veronese chama de contínuo intuitivo.
3
Ver [31], Apêndice 4.
4
Ver observação empírica n . 1, parte I, [72].
5
Isto é, formal.
2
3.1
Introdução
61
(definição) intuitiva, mesmo se, mais tarde, a definição abstrata, conformemente aos princípios matematicamente possíveis, contenha o seu
contínuo como caso particular.
O objeto da figura a), diz-se retilíneo. Examinando portanto o contínuo (figura, a)), vemos que pode ser considerado como composto de
uma sucessão de partes consecutivas idênticas, , , , etc. dispostas
da esquerda para a direita, e isto é válido entre certos limites do campo
de observação. As partes são separadas por cruzes assinaladas sobre o
próprio objeto, e são também contínuas. Por outro lado, percorrendo
com os olhos, da esquerda para a direita, observamos que as partes ,
, , , assim como (as partes) , , , etc.; , , etc. etc., são
idênticas da esquerda para a direita, e que estas particularidades têm
também lugar da direita para a esquerda.
Se entre duas partes consecutivas e da sucessão etc., não
existe nenhuma parte, enquanto que, por exemplo, entre as partes e
existe a parte ; e se se ignora a parte , o objeto retilíneo deixa de
ser contínuo. A observação garante que o que vale para as partes e
vale igualmente para duas partes consecutivas quaisquer, ou por outras
palavras, não existe outro todo com as mesmas propriedades do objeto
retilíneo, que separam duas partes consecutivas do referido objeto, ou
melhor, do lugar por ele ocupado (secção 23 e definição II, 25).
Vemos também que tanto experimentalmente (isto é, com uma sequência natural limitada de decomposições), como abstratamente, (isto é,
de acordo com qualquer hipótese ou operação matematicamente possível
que não contradizem os resultados da experiência) chegar a uma parte
que não é mais decomponível em partes (– parte indivisível), sendo o
contínuo composto destas partes indivisíveis (como um instante está para
o tempo).
É a própria experiência que nos faz olhar para o indivisível de tal
modo que não podemos obtê-lo experimentalmente, pois mostra-nos que
uma parte considerada indivisível em relação a uma observação não é
indivisível em relação a outras observações executadas com instrumentos
mais exatos ou sob outras condições. Se assumirmos que existe uma
parte indivisível, vemos que podemos ainda experimentalmente considerala indeterminada, e por isso menor que qualquer parte dada do objeto
retilíneo.
[...]
A hipótese de que o ponto não é parte do contínuo linear (e também que o próprio não tem partes6 ) significa que todos os pontos que
podemos imaginar nele, por mais que possam ser, não constituem o con6
«Então não precisamos de estabelecer no desenvolvimento teórico da geometria que o ponto
por si não tem partes. Por “por si” não queremos significar que uma tal coisa é independente de
nós, mas que tal coisa está na nossa representação mental.»
62
A Geometria Não-Arquimediana segundo Veronese
tínuo quando são juntados, e escolhendo uma parte ( 0 )7 tão pequena
quanto quisermos do objeto (fio) (para o tempo, um instante), por mais
indeterminada, o que é o mesmo que dizer sem nem 0 fixados nas
nossas mentes, a intuição diz-nos que esta parte é sempre contínua.
[...]
Ademais, entre dois pontos e 0 indeterminados em posição mas
não coincidentes (definição V,8), existe sempre uma parte contínua. E
porque o contínuo é determinado matematicamente pelos seus pontos,
temos de assumir que entre dois pontos quaisquer, também indeterminados, por mais próximos que estejam, existe sempre, pelo menos outro
ponto distinto dos pontos extremos (definição V, 8). Somos igualmente
conduzidos a esta hipótese pela observação de que um dado ponto no
objeto retilíneo, pode-se imaginar uma parte () do último que contém tal que e se aproximem cada vez mais de sem contudo
coincidir com , e por isso podemos imaginar uma parte com pontos extremos indeterminados, tão pequenos que nós queiramos que contenham
outro ponto 0 para além dos pontos extremos.
Finalmente, recebemos a impressão de que no objeto retilíneo (figura
acima), em torno de um dos seus pontos há duas partes e
tal que, considerando o primeiro de para e o segundo de para ,
são idênticos, e que a parte () atravessada de para é idêntica à
mesma parte atravessada de para (Definição III.9).
Podem todas estas características do objeto retilíneo ser estabelecidas
abstratamente sem recurso à intuição? Ou não serão algumas destas
características consequências necessárias de outras, ainda que sejam óbvias?
Estas são as questões às quais temos que responder nesta introdução,
e veremos que as características indicadas acima são mais do que suficientes.[72]
A abordagem de Veronese consta de três etapas: na primeira, constrói uma álgebra de segmentos e a correspondente álgebra numérica. Essa construção é puramente
sintética, por razões por ele justificados ([72], Introdução), e visa a elaboração de
um "sistema ordenado linear", ao mesmo tempo geométrico e numérico: em suma,
trata-se de uma régua (Não-Arquimediana – o conjunto II). Faz essa construção na
Introdução dos Fondamenti; a segunda etapa consiste em estabelecer alguns axiomas
geométricos que permitam configurar a reta, transferir para essa reta a estrutura da
forma fundamental, através de um isomorfismo8 , antecedendo a abordagem Birkhoffiana (métrica, [ver capítulo 11]) dos fundamentos da Geometria; a terceira etapa
consiste na exploração de geometrias construídas através do método da segunda
etapa.
7
Notação veronesiana para segmento de reta.
Postula que existe uma forma fundamental que serve para determinar todas as outras (formas),
Hip. IX.
8
3.1
Introdução
63
Nesta súmula vamos apresentar uma antevisão, sobretudo, da parte da construção e caracterização da forma fundamental. São os conceitos dessa parte, os
considerados basilares9 .
O ente geométrico básico para Veronese é aquilo a que chama forma. Uma forma
linear, ou de dimensão um, pode ser encarada como um grupo infinito, munido da
ordem total e sua inversa, ditas sentidos da forma10 . Um sentido é determinado
pela escolha de dois elementos da forma.
Numa forma identificam-se partes, que são todas as sequências de elementos consecutivos, em relação à ordem total. Por exemplo, se são elementos
de uma forma, então as partes são, para além de , , etc,
, , etc. As partes que consistem em mais que um elemento são denominadas segmentos. Os elementos e que limitam um segmento (isto é, são primeiro
ou último elemento) são chamados extremidades do segmento.
Um segmento é um indivisível ou contínuo, se entre e não houver
nenhum elemento de . Dois segmentos são consecutivos num dado sentido se a
segunda extremidade do primeiro segmento é a primeira extremidade do segundo,
no sentido dado.11
Uma forma linear é fechada se, quando se aplica a sua lei de construção, a
partir de um elemento da forma, se encontrar o elemento de novo, depois de
se ter obtido todos os outros elementos da forma. Uma forma linear fechada pode
ser considerada como um segmento cujos extremos coincidem com um elemento da
forma. Uma forma linear é aberta se e só se tem um primeiro elemento, e é ilimitada
(infinita)12 se e só se não tem primeiro ou último elemento.
Uma forma linear aberta é simples se nenhum dos seus elementos for repetido.
Uma forma linear fechada é simples se, começando num elemento qualquer, nenhum
elemento é repetido até que todos os elementos tenham sido construídos.
Uma forma aberta é ilimitada. Uma forma aberta simples é decomposta por
um qualquer dos seus elementos em duas partes ilimitadas, que não têm mais nenhum elemento comum, podendo-se considerar que uma delas tem uma das direções
possíveis e a outra tem a direção oposta.
Uma forma linear fechada pode ser considerada como um sistema linear ilimitado,
iniciado por qualquer um dos seus elementos, considerando as repetições dos mesmos
como sendo novos elementos.
A noção de homogeneidade é a principal característica de simetria das formas e
um dos principais pontos de discórdia entre Veronese e Cantor. Uma forma linear é
homogénea num dado sentido se, para qualquer elemento da forma, existem dois
segmentos no mesmo sentido, um dos quais tem como primeiro extremo e o outro
tem como o segundo extremo.
9
Uma análise mais pormenorizada, mais completa, e numa terminologia mais próxima da veronesiana, é feita no Anexo III de [31].
10
A ideia de “forma” é a de grupo ordenado não-arquimediano de segmentos.
11
Estas duas definições são iguais às aparecidas em Aristóteles. Ver [31] Apêndice D.
12
Esta terminologia faz lembrar o “ilimitado” da ANS, isto é, refere-se a um conjunto com um
número infinito de elementos. Vamos manter a terminologia veronesiana.
64
A Geometria Não-Arquimediana segundo Veronese
Segue-se que quando uma forma homogénea é aberta, – ou fechada mas considerada como aberta 13 –, é limitada (finita) em ambos os sentidos.
Por argumentos de indivisibilidade e homogeneidade, Veronese mostra que, se
existem segmentos indivisíveis, são iguais.
Uma forma homogénea numa direção, também o é na direção oposta.
Outro conceito de simetria é introduzido a partir da definição seguinte: se
numa forma linear homogénea, a forma linear obtida, considerando todos os elementos a partir de um elemento qualquer é idêntica (isto é, a mesma, a menos
da posição, ou seja, congruente14 ) ao sistema obtido partindo do mesmo elemento
, mas seguindo no sentido oposto, o sistema é dito idêntico na posição das suas
partes.15
Esta simetria permite movimentos lineares sem deformação ou isometrias: qualquer parte de uma forma linear, “idêntica na posição das suas partes”, “pode moverse ou atravessar essa forma e manter-se idêntico a si própria ou invariante”.16
Como axioma de existência, Veronese assume que existe uma forma linear, idêntica na posição das suas partes, que serve para determinar todas as outras formas
lineares (secção 71, hipóteses I e II), chamada de forma fundamental ou básica 17 .
Todas as formas fundamentais ou básicas são supostas idênticas.
As operações de adição e de subtração de dois segmentos são introduzidas na
forma fundamental e a partir daí o produto de um número racional por um segmento:
dado um segmento da forma fundamental, e se se construir, a começar por um
elemento qualquer, segmentos consecutivos iguais (congruentes) a , o segmento
resultante é um múltiplo de , e é um submúltiplo ou fator do segmento
resultante, . Isto leva às frações de segmentos denotadas pelas expressões da
forma (), onde é um segmento orientado de para .
Uma noção veronesiana fundamental é a de escala. Uma escala obtém-se começando
num elemento qualquer da forma básica e considerando uma sucessão natural de segmentos consecutivos todos iguais a um segmento dado , chamado unidade da
escala. Diz-se que as extremidades de cada um dos segmentos numa escala dividem
elementos da escala.
Associado ao de escala, está o conceito de campo ou região de uma escala 18 . O
campo de uma escala é um segmento ilimitado da forma fundamental que consiste
em todos os segmentos consecutivos, na direção da escala (não necessariamente na
escala).
13
Quando, embora a forma seja fechada, fechada, consideram-se as repetições de elementos, num
dos sentidos, ou em ambos, como sendo novos elementos. Neste caso a forma aberta resultante não
é simples.
14
Ver a definição de “identidade” em Veronese, mais adiante.
15
Isto é, dada uma parte da forma, existe na mesma, um número infinito de outras partes,
congruentes com ela – ver mais adiante.
16
Esta noção (a par da sua definição por dois dos seus elementos) ajuda a intuir a “rectilinearidade” da forma, que porém pode ter curvatura constante, como se verá mais adiante.
17
No sentido de conter a estrutura geométrica mínima: as outras resultam de translações desta.
18
Ou classe arquimediana, noção descoberta independentemente por Veronese e Betazzi (ver
adiante).
3.1
Introdução
65
A maneira de associar números à forma fundamental é atribuindo aos elementos
de divisão de uma escala dessa forma, números naturais, exceto o zero que é associado
ao primeiro elemento. Quando um segmento tem uma -ésima parte, associa-se
o número racional ao -ésimo múltiplo dessa parte, a começar no primeiro
extremo do primeiro segmento, e continuando da mesma forma através dos outros
segmentos, com = 1, ( + 1), ( + 2), etc.
A forma fundamental serve de referencial unidimensional. Assim, todos os segmentos e escalas são considerados sobre ela.
Veronese considera vários resultados que relacionam escalas, ainda no âmbito das
escalas Arquimedianas:
– Se, numa forma fundamental, com uma escala de unidade um segmento
é igual a um segmento cujos extremos são dois elementos da região da
escala, e 19 , então existe um número natural tal que ≤
( + 1)
– Se duas escalas têm unidades e 0 0 e 0 0 (isto é, existe um
segmento 0 0 tal que 0 0 + 0 0 = ), e existe um número natural tal que
0 0 , os campos das duas escalas são iguais em relação às sequências de
segmentos das duas escalas. Como corolário, tem-se que as regiões de duas escalas
são iguais se a unidade de uma é múltiplo da unidade da outra.
Mas pode acontecer20 que o campo de uma escala cuja unidade é igual a um
segmento dado, e o campo de outra escala, com unidade 0 0 , e não existe
nenhum número natural tal que 0 0 se 0 ou 0 se
0 . Nesse caso o campo da escala de e o campo da escala de 0 não
são iguais. É o caso Não-Arquimediano. Tem-se os seguintes resultados:
– Se e são dois elementos no campo de uma escala de uma forma fundamental, então o campo da escala que começa em no sentido de para é
congruente (igual em relação à sequência de segmentos consecutivos) com o campo
da escala, da parte da escala que começa em .
– No campo da escala de unidade , seja um segmento que começa em
. Pelo resultado precedente, tem-se + é congruente com . Nesse caso
diz-se que é negligenciável em relação a .
Como corolário tem-se que todo o segmento limitado do campo de uma escala
é negligenciável em relação ao segmento restante do campo, que começa no fim do
segmento limitado.
O passo seguinte na construção veronesiana é postular que, numa dada direção
da forma fundamental, existe pelo menos um elemento da forma, que está fora da
região de qualquer escala sobre ela, cuja unidade é um segmento limitado (secção
82, hipótese III).
Portanto, se na forma fundamental se escolher como unidade um segmento ,
e se considerar a sua escala, (que consiste nos múltiplos do segmento unidade por
números naturais), existe sempre outro elemento da forma fundamental que não é
19
20
No sentido de ser congruente com uma parte própria de .
O que não é contraditório em relação às anteriores hipóteses.
66
A Geometria Não-Arquimediana segundo Veronese
nenhum desses múltiplos21 .
Supondo um conjunto ordenado , tal que, partindo de qualquer um dos seus
elementos, é ilimitado da primeira espécie (isto é, equivalente a N), que é dado por
segmentos consecutivos iguais, na ordem do grupo (isto é, é gerado por múltiplos de
um segmento de escolhido como unidade, e considerando o campo assim obtido),
então pode-se considerar a estrutura como um elemento, e tomar outro elemento
0 idêntico a (isto é, o mesmo, exceto a posição), mas que está fora de , e
que não tem nenhuma forma fundamental comum com . Além disso, pode-se
considerar as formas e 0 como estando na ordem 0 . Então 0 é uma
sequência finita consistindo de duas subsequências e 0 , na qual cada elemento
de precede todo o elemento de 0 .
Pode-se construir uma sequência finita de três cópias de , nomeadamente
0 00 , de tal forma que 0 seja congruente com 0 00 e assim sucessivamente. Considerando um segmento limitado 0 com em e 0 em 0 , então
existe um e um só elemento 00 de 00 tal que o segmento limitado 0 00 corresponde
(é congruente) a 0 . Diz-se então que a forma fundamental se estende para além
do campo de qualquer escala sobre ela.
Quando se começa com uma escala e se toma um elemento fora dela, nota-se
esse elemento por ∞ em combinação com alguma letra do alfabeto (as usuais para
representar pontos).
Verifica-se que um segmento (limitado) que tem uma extremidade no campo de
uma escala e a outra extremidade fora desse campo, é maior que qualquer segmento
definido por dois elementos da escala.
Estes resultados levam ao seguinte teorema (secção 82, c):
– Todo o segmento que gera o campo de uma escala é menor que todo o segmento
com o mesmo sentido que a escala, e que tem uma extremidade na região de uma
escala, e a outra fora da região dessa escala.
Veronese diz (secção 82, def II):
– Com vista a distinguir os segmentos limitados por extremos que geram o
campo de uma escala com uma unidade arbitrária 1 dos que não geram a escala,
e são maiores que aqueles, (isto é, maiores que os segmentos da escala), chama-se
finitos aos primeiros e infinitamente grandes atuais ou infinitamente grandes em
relação à unidade da escala dada, aos segundos. Porém, se o segundo é menor que o
primeiro, diz-se que ele é infinitamente pequeno atual ou infinitamente pequeno em
relação à unidade dada 22 . Por exemplo, a unidade 1 ou um segmento limitado
arbitrário de uma dada escala é infinitamente pequeno em relação a um segmento
infinitamente grande ∞
Naturalmente Veronese espera que as operações usuais e as relações de ordem
sejam válidas para os segmentos generalizados. Por exemplo, um segmento é ou
finito ou infinitamente pequeno () ou infinitamente grande () em relação a outro
21
Evidentemente Veronese pretende que o segmento determinado pelo elemento inicial de qualquer escala e o novo elemento fora da escala tenha o mesmo sentido que a escala.
22
É absolutamente notório o carácter de relatividade dos adjetivos finito, infinitamente grande
e infinitamente pequeno, que é uma das principais chaves para a compreensão de Veronese.
3.1
Introdução
67
segmento, e a adição de dois segmentos que partilham apenas uma extremidade, que
são finitos (, ) em relação a outro segmento resulta num segmento que é ainda
da mesma natureza. O campo de uma escala é em relação a qualquer segmento
nele contido, e segue-se da hipótese III que o campo está num segmento limitado
que é em relação a qualquer segmento do campo da escala, mas que não é igual
à própria região23 .
Na hipótese IV sobre as formas fundamentais, Veronese estabelece que: se se
inicia com segmento unitário arbitrário 1 , e se escolhe um elemento arbitrário
(∞) tal que o segmento (∞) seja em relação a 1 , então existe um elemento
em (∞) tal que e (∞) são em relação a 1 , e existe um elemento
(∞) tal que o segmento , para qualquer em tais condições, é finito em relação
a (∞)
Este axioma leva à definição de ordens de infinitamente grande (secção 86, def
II):
– Se se iniciar com um segmento unitário 1 , e se tomar qualquer ponto
(∞)
nas condições da hipótese IV, diz-se que o segmento (∞) é um segmento
infinitamente grande de primeira ordem em relação a 1 . Se se aplicar a Hip.
IV ao segmento (∞) , e obtiver um segmento infinitamente grande de primeira
ordem em relação a (∞) , esse segmento é infinitamente grande de segunda ordem
em relação a 1 . E assim indutivamente, encontram-se segmentos infinitamente
grandes da -ésima ordem em relação ao segmento unitário 1 .
É claro que se um segmento é de ordem em relação a outro segmento, este
é de ordem em relação ao primeiro.
Segmentos finitos em relação um ao outro são ditos segmentos da mesma espécie.
Segmentos da mesma ordem em relação a um segmento dado, são da mesma
espécie, e similarmente para os segmentos .
Veronese introduz a notação para números que correspondem às segundas extremidades dos segmentos que são em relação à unidade, como se segue: para
os números correspondentes à segunda extremidade de um segmento de primeira
ordem em relação à unidade 1 , começa-se com ∞1 como origem (correspondendo
ao elemento (∞) acima, e escrevendo ∞1 + ou ∞1 − para os números correspondentes às extremidades de segmentos obtidos juntando a unidade 1 vezes
numa direção ou noutra. Para além disso, constrói-se uma escala com a unidade
∞
1 tomando múltiplos desta unidade por números naturais , e pode-se juntar
múltiplos de 1 a estes em todos os sentidos. Neste caso, diz-se que a unidade
maior contém a unidade menor ∞1 vezes.
Quando se itera este processo, obtém-se para um sistema ou forma de segunda
ordem em relação a 1 (portanto, de primeira ordem em relação a ∞
1 , números
da forma ∞2 + (ou −), onde agora é o número de vezes que se junta a unidade
∞
1 ) E assim indutivamente, para um sistema de ordem em relação a 1 .
Veronese distingue muito bem os seus números infinitos dos transfinitos de Cantor, mostrando, aliás, maior consciência dessas diferenças que o próprio Cantor
23
Regras de Leibniz.
68
A Geometria Não-Arquimediana segundo Veronese
(secção 90):
– A diferença entre os nossos números infinitamente grandes e os de Cantor,
é que não reconhecemos um primeiro número infinitamente grande...24 enquanto
que para os números infinitamente grandes de Cantor, é o primeiro no sentido
absoluto. Portanto: isto significa que dado um dos nossos números infinitamente
grandes, por exemplo ∞1 então existem números ∞1 − diferentes de ∞1 que está
entre os números finitos e ∞1
Para dar uma ideia da profusão vertiginosa de escalas que tem em mente, Veronese
enuncia a sua hipótese V, “sobre a construção de segmentos infinitamente grandes
da forma fundamental”
– Todo o segmento infinitamente grande, que não de ordem finita, é obtido
aplicando o princípio da hipótese IV, um número infinitamente grande de vezes, o
número tendo já sido dado ou produzido pelos novos segmentos construídos dessa
forma.
Esta hipótese acaba esta síntese.
3.2
O problema e as hipóteses do contínuo
Veronese faz depender a continuidade de um segmento 0 da garantia de existência de um elemento no seu interior, isto é, da existência de um elemento fora do
campo de variabilidade de e de 025 , quando esses dois elementos se aproximam
um do outro, indefinidamente. Começa por colocar o problema na observação I, 96:
«– Havíamos suposto [acima] que o segmento finito variável 0 tinha
um elemento fora do campo de variabilidade dos elementos e 0 .
Mas, se com uma lei dada, se tem um segmento, cujos extremos são
variáveis em sentidos opostos e que se torna , dos princípios precedentes, não resulta que existe um dos seus elementos fora do campo de
variabilidade dos seus extremos, porque a hipótese oposta não conduz a
qualquer contradição em relação a esses princípios, exceto se se sabe de
antemão que tal elemento existe».26
A seguir, na mesma observação, demonstra a seguinte
Proposição 3.1 Se se considerar em torno de cada elemento, um campo infinitésimo, de modo que os elementos desse campo satisfaçam à definição de um sistema
homogéneo, será então satisfeita a hipótese IV dos segmentos finitos em relação aos
segmentos infinitésimos.
24
Na teoria dos ordinais de Cantor, é o primeiro ordinal infinito.
Repare-se que, na ausência do axioma de Arquimedes, se e 0 não devem afastar-se indefinidamente um do outro (só o podem fazer dentro do seu respetivo campo arquimediano de
variação), também não devem aproximar-se indefinidamente, até à “colagem”, pois nesse caso o
segmento 0 resultaria num ponto (sem partes, absolutamente indivisível).
26
Isto é, pode existir uma lacuna entre dois estados de aproximação de e 0
25
3.2
O problema e as hipóteses do contínuo
69
E continua:
– Embora todo o elemento seja limite de um ou mais segmentos
variáveis 0 , não se pode dizer que, inversamente, um segmento variável 0 que se torna e cujos extremos são elementos do conjunto,
contenha outros elementos fora do campo de variabilidade dos seus extremos e que, portanto, tenha um elemento limite27 ; como também não
está excluída a hipótese de existir sempre um tal elemento[72].28
O próprio Veronese reconhece que este problema é o cerne da questão da continuidade da sua forma fundamental e, de novo, recorre ao contínuo intuitivo para
o solucionar:
–Recorrendo ao contínuo intuitivo determinado pelos pontos do objeto retilíneo somos conduzidos a admitir que, em todos os casos, o segmento variável 0 contém elementos fora do campo de variabilidade
0
entre e .29
Portanto estabelece a
Hip.VI (hipótese de continuidade relativa) Todo o segmento que, tendo os
extremos sempre variáveis em sentidos opostos, se torna indefinidamente pequeno,
contém um elemento fora do campo de variabilidade dos extremos referidos.
Esse "elemento" que pertencia, até agora à forma fundamental mas não ao segmento, passa com esta hipótese a integrar o segmento 0 , passando o mesmo a
ser contínuo, por via do completamento do "espaço" entre os campos de e de
030 .
Esta hipótese permite a Veronese definir sistema contínuo e sistema discreto em
relação a uma dada unidade:
Definição 3.1 (Sistema homogéneo contínuo, sistema homogéneo discreto) Um sistema homogéneo no qual a hipótese VI tem lugar, diz-se um sistema homogéneo
contínuo relativo ou em relação a uma unidade dada. Um sistema homogéneo no
qual a hipótese VI não tem lugar, diz-se um sistema homogéneo discreto em relação
à unidade dada.
27
O elemento limite está fora do campo de variabilidade. Esta observação crucial, carece de
demonstração, pois é exatamente este o problema que Veronese quer resolver.
28
A existir sempre o espaço é completo no sentido de Cauchy, Cantor e Veronese.
29
Observemos que os postulados elementos "fora" do campo de variabilidade dos pontos e
0 sobre a "forma fundamental" vão permitir a Veronese estabelecer a existência de novas escalas
sobre a forma fundamental, quer ao nível micro, quer ao nível macro. Ao nível micro no caso em
que e 0 se movem aproximando-se um do outro: neste caso postula a existência de um elemento
infinitamente pequeno (a comparar com o segmento 0 ). Esse postulado garante a continuidade
da forma fundamental. No sentido oposto, ao se afastarem um do outro e, tomando o segmento
0 original como unidade, alcança-se o infinitamente grande, postulando a existência de um
ponto ∞ fora da escala considerada. Esse ponto é o primeiro nível das grandezas infinitamente
grandes, como veremos mais adiante.
30
O espaço (linear) abstrato e indiferenciado (matriz) em Veronese é representado pela sua forma
fundamental.
70
A Geometria Não-Arquimediana segundo Veronese
A hipótese VI garante a existência e unicidade do limite de uma sucessão ,
decrescente e limitada, sobre a forma fundamental, numa unidade pré-fixada:
Teorema 3.1 (96,a) (Existência) Em todo o segmento que se torna indefinidamente
pequeno em relação a uma dada unidade, com extremos variáveis em sentidos opostos, existe pelo menos um campo infinitésimo de elementos fora do campo de variabilidade dos extremos do segmento variável;
Dem.(Veronese) Com efeito, se é o elemento dado pela hipótese IV, assim
como existe sempre um campo infinitésimo em relação à unidade dada (def. II, 94),
também existe um idêntico em torno de todo o elemento do sistema (def. I,68), e
por isso, também em torno de . Nenhum elemento deste campo pode pertencer
ao campo de variabilidade dos extremos do segmento sempre variável, pois no caso
contrário, existiriam estados infinitamente pequenos do segmento, contra a hipótese
(def. I,95) .¤
Teorema 3.2 (96,b) (Unicidade) Todo o segmento que se torna indefinidamente
pequeno em relação a uma dada unidade, com extremos variáveis em sentidos opostos, tem por limite um único elemento do sistema, e em sentido absoluto um campo
infinitésimo.
Dem. (Veronese) Seja 0 o segmento variável, e e 0 dois dos seus elementos,
mas não contidos no campo de variabilidade dos elementos e 0 O segmento 0
deve ser infinitamente pequeno, se e 0 são diferentes (def. II, 82, e def. II, III,
57), visto que, de contrário, na sua variação, 0 permaneceria sempre maior que
um segmento finito 0 , contra a hipótese.¤
Teorema 3.3 (96,b’) Dado um segmento variável crescente, e um segmento
variável 0 decrescente, no sentido oposto, e se 0 se torna em relação
à unidade31 , existe um único tal que é segmento limite dos dois segmentos
variáveis. Se for estritamente crescente e 0 estritamente decrescente,
não é estado de uma das variáveis (e portanto) 0 não converge.¤
Antes de continuar, convém observar o seguinte:
i) Os teorema 3.1 e 3.2 e suas demonstrações deixam muito claro o sentido da
continuidade de Veronese: com a adopção da hipótese VI (continuidade relativa), a
lacuna existente no segmento 0 em virtude da aproximação indefinita dos seus
extremos, cada um nos seus campos, sem que estes se intersectem, é preenchida
por um elemento da forma fundamental que, pela hipótese, passa a integrar o
segmento;
31
Veronese fala da unidade, como se houvesse uma unidade padrão estandardizada (como na
Física), ou abstrata, como na matemática usual. A verdade é que ele, para concretizar e tornar
menos pedante o discurso, tem de admitir sempre que o geómetra tem uma unidade de partida,
que poderá cambiar no decorrer da geometria. Uma geometria Não-Arquimediana Veronesiana é
uma geometria de unidades variáveis e incomensuráveis.
3.2
O problema e as hipóteses do contínuo
71
ii) O elemento é pode ser assumido como o limite de uma sucessão (de Cauchy)
no segmento 0 ;
iii) O elemento é "gordo" em relação aos restantes elementos (pontos) de 0 ;
iv) O elemento é ele próprio, numa escala menor, um campo, isto é, um
segmento infinitesimal.
É inevitável o paralelismo existente entre os números representados por elementos
do tipo de e os números irracionais da reta. Aliás, reconhece-se nesta construção
grande semelhança com os métodos usuais de criação do corpo dos reais através do
completamento do conjunto dos irracionais pelo método das sucessões de Cauchy e
pelo método dos intervalos encaixados.
O teorema seguinte refere-se à majoração das unidades:
Teorema 3.4 (96,c) O sistema homogéneo contínuo em relação a uma unidade de
medida, é-o em relação a qualquer unidade infinita, mas pode não sê-lo em relação
a uma unidade infinitésima.
Dem. Com efeito, nesse caso, todos os segmentos finitos são iguais em relação à
unidade infinita, porque nulos (teorema g,85) e todo o campo finito reduz-se assim a
um só elemento em relação à unidade infinita; embora o sistema pudesse ser discreto,
em relação a uma unidade infinitamente pequena em torno de um seu elemento dado
qualquer, do campo finito.¤
Têm-se também os teoremas seguintes:
Teorema 3.5 (97,a) Os estados sucessivos de uma variável estritamente crescente
ou decrescente e ilimitada de 1 espécie a partir de um deles, podem-se indicar com
números da sucessão (I)32 .
Dem. Com efeito, entre dois estados consecutivos dados 0 de um segmento variável, basta considerar aqueles pelos quais 0 (se 0 ), ou então
0 (se 0 ) seja finito, porque se fosse , poder-se-ia desprezá-lo em relação aos segmentos finitos; por outro lado, não pode ser infinito (teorema h,85)
Portanto se a variável é estritamente crescente ou decrescente, em relação à unidade
de medida 0 no primeiro caso ( 0 no segundo) é sempre finito, quando se trata
de dois estados diferentes. Mas os estados dos segmentos variáveis constituem uma
sucessão ilimitada de primeira espécie, que corresponde univocamente e na mesma
ordem que a sucessão (I); portanto os estados da variável podem ser indicados com
número da sucessão (I), isto é
1 2
.¤
Vê-se que a hipótese de continuidade relativa permite estabelecer uma bijeção
entre um segmento (aberto) graduado e o conjunto I. A mesma hipótese permite
demonstrar os seguintes teoremas, sobre intervalos na reta:
32
Ver a construção dos números de Veronese em [72] . A sucessão I representa a sucessão dos
números naturais; o conjunto II representa o conjunto dos números racionais, permeado de lacunas
infinitesimais e completada com infinitamente grandes.
72
A Geometria Não-Arquimediana segundo Veronese
Teorema 3.6 (97,b) Dada uma variável finita estritamente crescente (crescente) e a variável finita decrescente (estritamente decrescente) 0 no mesmo sentido tal que ( 0 ) seja sempre menor (maior) de todo o estado de 0 (),
e todo o segmento menor (maior) de 0 () pertence à primeira (segunda)
variável, o segmento 0 torna-se em relação à unidade dada.¤
Teorema 3.7 (97,c) O segmento + compreendido entre dois estados sucessivos ,+ da variável finita, se for estritamente crescente, ou + se
for estritamente decrescente, e se tiver como limite o segmento , torna-se
quando cresce indefinidamente e fazendo constante, ( ∈ I).¤
Teorema 3.8 (97,d) Para um segmento finito variável estritamente crescente
(ou decrescente) há sempre, em relação à unidade de medida, um e apenas um
segmento limite maior (ou menor) que todos os estados da variável.¤
Veronese faz a seguinte observação:
– Obs. Assim como supomos que as sucessões correspondentes à
variável sejam limitadas naturais, ou ilimitadas de primeira espécie, assim pode haver num dado sentido um só elemento ou segmento limite.
No caso de sucessões que têm outros limites, o limite referido no teorema 3.8 é aquele ordinariamente chamado segundo Weierstrass limite
superior ou limite inferior.[72]
Teorema 3.9 (97,d’) Duas sucessões de segmentos estritamente crescentes ou decrescentes, respetivamente iguais, determinam segmentos iguais em relação à unidade
dada.¤
Teorema 3.10 (97,d”) Duas sucessões e 0 uma crescente e outra decrescente, têm um segmento limite comum, se 0 é sempre maior que , e todo o
segmento , maior que um estado de é menor que um estado de 0 é um
estado de ou de 0 .¤
Teorema 3.11 Um elemento chama-se elemento limite em relação a uma unidade
de uma sucessão de elementos 1 2 ... ordenada num dado sentido da forma
fundamental; ou quando é o primeiro ou último elemento da sucessão; ou também
quando a sucessão é tal que um segmento finito tão pequeno quanto se queira,
no sentido oposto dela, existe um elemento da sucessão dada.¤
Teorema 3.12 (98,a) Se é o segmento limite de um segmento o elemento
é elemento limite da sucessão dada dos elementos .¤
Teorema 3.13 (98,b) Um conjunto com um número infinito (∞) de elementos distintos () compreendidos num segmento dado tem sempre, pelo menos, um
elemento limite em relação à unidade de medida.¤
3.2
O problema e as hipóteses do contínuo
73
Teorema 3.14 (98,b’) Uma sucessão de elementos ( ) sobre a forma fundamental, tal que o segmento + com o aumentar de se torna tem um só
elemento limite em relação à unidade de medida.¤
O problema da decomposição de um segmento finito em partes é tratado no §8.
Tem-se:
Teorema 3.15 (99,a) O segmento 1 10 ou 10 1 , dado por dois segmentos 1 ,
10 torna-se indefinidamente pequeno se o segmento dado pelas extremidades dos
múltiplos de 1 e 10 , segundo o mesmo número torna-se também indefinidamente pequeno. E inversamente.¤
Teorema 3.16 (99,b) Todo o segmento pode ser dividido, de uma só maneira, num
número finito qualquer de partes consecutivas iguais, do mesmo sentido, em relação à unidade de medida.¤
Corolário 3.1 Se a forma fundamental é fechada, então pode ser dividida em
partes iguais.¤
Corolário 3.2 Dado um segmento finito, existe sempre um segmento 1 ¤
Teorema 3.17 (99,c) A hipótese VI é independente das hipóteses precedentes.¤
Teorema 3.18 (99,d) Se 0 é a -ésima parte, e 00 a 0 -ésima parte, de um
segmento qualquer (0 ), 00 é menor que 0 , e se aumenta indefinidamente, então 0 torna-se .¤
Corolário 3.3 Se se divide um segmento qualquer em partes iguais ( ≥ 1)
e este de novo em partes iguais, e assim por diante, as partes tornam-se .¤
A manipulação algébrica dos segmentos é feita à luz dos resultados seguintes:
Teorema 3.19 (99,e) Se se adiciona um segmento a um segmento a partir
de do mesmo sentido, ou de sentido oposto em relação à unidade de medida, temse o mesmo resultado, somando ao segmento a partir de o segmento idêntico
a e do mesmo sentido que . O resultado é independente do elemento do qual
se começa a aplicar a operação, isto é, + = , + = .¤
Corolário 3.4 Dado um segmento há sempre um segmento tal que
( + 1)
sendo um número dado.¤
Teorema 3.20 (99,f) O segmento, múltiplo segundo um número da -ésima
parte de de um segmento é submúltiplo, segundo o número de um
segmento múltiplo de segundo o número .¤
74
A Geometria Não-Arquimediana segundo Veronese
Teorema 3.21 (99,g) Um segmento qualquer finito é igual, em relação à unidade
de medida, ao próprio segmento percorrido no sentido oposto.¤
Teorema 3.22 (99,h) Dividindo um segmento num número de partes iguais
e as partes resultantes em partes iguais e assim sucessivamente, obtém-se um
conjunto de elementos do segmento dado, compreendido entre os extremos, cujos
outros elementos são elementos limitados do conjunto dado em relação à unidade
de medida.¤
Corolário 3.5 As partes de um segmento considerado como unidade, cujos elemento sejam elementos da divisão sucessiva de pela metade, podem
ser representados pelo símbolo
(
1 2
+ 2 + + )
2
2
2
onde 1 2 são iguais a 0 ou 1, mas não todos nulos. Nos outros casos podem
ser representados pelo símbolo
lim(
1 2
+ 2 + + + )
2
2
2
com lim = ∞¤
Corolário 3.6 No caso em que não tem, no símbolo dado um último valor, e se
a operação se considera como efetuada, pode-se representar as partes do segmento
com o símbolo
1 2
( + 2 + + + )
2
2
2
com = 1 2 ( = ∞)¤
Definição 3.2 (II,99)(segmento racional, irracional) Se ( 21 + 222 + + 2 + )
determina um segmento , sendo um elemento obtido com a divisão sucessiva
em partes iguais do segmento , o símbolo ( 21 + 222 + + 2 + ) diz-se
racional, no caso contrário diz-se irracional.
Para demonstrar a pertinência da introdução da sua hipótese VII de continuidade
absoluta, Veronese observa que:
Considerando agora de novo toda a forma fundamental, e o segmento
que serviu para a construção da primeira escala, temos as seguintes
hipóteses:
1 é indivisível
2 é soma de um número finito de segmentos indivisíveis;
3 é divisível num número qualquer finito de partes finitas entre
si, caso em que, pela defI68 e pela hipVI, é contínuo relativo;
4 Existe um campo infinitésimo em relação ao segmento primitivo
dado , por exemplo de ordem (obs. III, 91 e defVI86). Em tal
3.2
O problema e as hipóteses do contínuo
75
caso todo o segmento infinitésimo de primeira ordem em relação a
teria um último campo infinitésimo de ordem − 1. E pode dar-se ainda
neste caso que no último campo infinitésimo de ordem em relação a
nele exista um último segmento indivisível que não contenha outros
elementos (def.V,62). Em tal caso a forma fundamental não poderia ser
contínua neste campo (hip. VI).
5 Pode dar-se ainda o caso em que o segmento não contenha um
último campo infinitésimo de modo que a série das ordens dos campos
infinitésimos seja limitada, mas ultrapasse um número infinito determinado. Assim sucederia se as ordens dos campos infinitésimos fossem
dados pelos números 1 2 3 da sucessão (I).
Em todo o caso os segmentos dados da forma fundamental não têm a
mesma propriedade em relação à sua composição em campos infinitésimos e portanto, para a própria uniformidade, a este respeito, dos segmentos dados estabelecemos a seguinte [...][72]
Assim, decide assumir uma hipótese de homogeneidade interescalar33 ,
preparatória à continuidade absoluta:
Hip VII. (hipótese de homogeneidade interescalar) O segmento que
serviu para construir a primeira escala, contém infinitésimos da mesma ordem das
de qualquer outro segmento limitado da forma fundamental maior que .
Depois de provar a independência desta hipótese das precedentes, Veronese apresenta uma série de resultados de caracterização da forma fundamental e das suas
partes, bem como da álgebra de segmentos associada, à luz da hipótese VII:
Teorema 3.23 (100,b) Todo o segmento limitado da forma fundamental satisfaz a
hip VII.¤
Observação. Da hipótese VII resulta que não há um último segmento dado
indivisível, isto é um segmento menor que qualquer segmento dado.
Teorema 3.24 (100,c) A diferença entre dois segmentos , finitos absolutos,
não idênticos, é um segmento finito absoluto.¤
Definição 3.3 (100,I) Não há um infinitésimo em relação à unidade absoluta no
sentido até aqui usado dessa palavra, caso contrário, existiria um último infinitésimo,
contra a hipótese VII. Mas para uniformidade de linguagem pode-se dizer que existe um infinitésimo absoluto cujos extremos devem ser considerados como um só
elemento, em sentido absoluto, com base nos princípios já admitidos, isto é, o infinitésimo absoluto é nulo em relação à unidade absoluta, ou seja em relação a todo
o segmento tomado como unidade de medida.
33
Denominação nossa.
76
A Geometria Não-Arquimediana segundo Veronese
Esta definição/observação estabelece a necessidade de, por razões práticas, face
à proliferação vertiginosa de escalas, se fixar uma absoluta, em que os elementos são
pontos no sentido clássico, de Euclides a Dedekind. Segue com algumas consequências da fixação desse ponto ou segmento infinitésimo absoluto.
Teorema 3.25 (100,d) Dois segmentos que diferem de um segmento infinitésimo
absoluto são iguais, em sentido absoluto.¤
Teorema 3.26 (100,e) Todo o segmento da forma fundamental, orientado de
para pode-se decompor num número infinito determinado por segmentos
consecutivos infinitésimos, sucessivamente de ordem + 1 ¤
Teorema 3.27 (100,f) Em todo o segmento há sempre um segmento cujo múltiplo segundo o número dado é menor que e um cujo múltiplo segundo o mesmo
múltiplo é maior que .¤
O axioma de continuidade absoluta, é introduzido num contexto de segmentos
que variam em relação à escala absoluta. Vejamos os resultados de Veronese a
respeito de segmentos considerados nessa escala.
Definição 3.4 (100,II) Um segmento finito absoluto que se torna menor que
todo o segmento absoluto dado, diz-se que se torna absoluto ou que tende a
tornar-se absoluto, ou ainda, que tem por limite um absoluto, e escreve-se
lim =
Definição 3.5 (100,III) Um segmento finito absoluto tal que se aproxime
indefinidamente em sentido absoluto de um outro elemento diz-se que tem por
limite o segmento , e escreve-se
lim =
Definição 3.6 (100,IV) (Variável absoluta estritamente crescente, decrescente) Por
variável absoluta estritamente crescente ou estritamente decrescente entende-se um
segmento variável estritamente crescente ou estritamente decrescente tal que as
diferenças entre dois estados quaisquer de um estado qualquer dado da variável não
permaneçam sempre finitos entre si, ou não sejam sempre infinitas ou infinitésimos
entre si de uma ordem que não supere um número dado de (II).
Teorema 3.28 (100,g) Se um segmento absoluto com o extremo variável
torna-se menor que todo o segmento finito absoluto dado então tem por limite o zero
absoluto, isto é:
lim = 0
¤
3.2
O problema e as hipóteses do contínuo
77
Teorema 3.29 (100,h) Um segmento pode tornar-se indefinidamente pequeno
em sentido absoluto, num e no outro sentido.¤
Teorema 3.30 (100,i) Se os elementos e 0 se aproximam indefinidamente em
sentido absoluto e em sentidos opostos de um dado elemento , 0 torna-se indefinidamente pequeno absoluto.¤
Teorema 3.31 (100,l) Um segmento que se torna indefinidamente pequeno em sentido absoluto com os extremos variáveis em sentidos opostos e contém um elemento
fora do campo de variação dos seus extremos tem por limite um só elemento.¤
Teorema 3.32 (100,m) Se se aproxima indefinidamente de um elemento 0 em
sentido absoluto, e este se aproxima no mesmo sentido de um elemento , se
aproxima em sentido absoluto de .¤
Teorema 3.33 (100,n) Se e 0 se aproximam indefinidamente, em sentido absoluto, e no mesmo sentido, de um elemento , 0 ou 0 , torna-se indefinidamente pequeno em sentido absoluto.¤
A preparação da introdução imediata da hipótese de continuidade absoluta é
feita na seguinte observação:
A hipótese VI diz que se 0 se torna indefinidamente pequeno em
relação a todo o segmento dado tomado como unidade, quando e
0 se aproximam em sentidos opostos, o segmento 0 contém sempre
pelo menos um elemento diferente de e de 0 . Mas pela hipótese
VII contém sempre infinitésimos em relação a . Quando, ao contrário, 0 se torna indefinidamente pequeno em sentido absoluto se
torna menor que todo o segmento infinitésimo dado, e portanto os dois
casos são distintos, e apenas da hipótese VI como se verá em seguida,
não deriva que, no segundo caso, 0 contenha um elemento fora do
campo de variação dos extremos. Por isso, e também pela uniformidade
que em sentido restrito intuímos entre as partes indefinidamente pequeno
do objeto retilíneo estabelecemos a seguinte[...][72]
Hip. VIII (da continuidade absoluta) Todo o segmento 0 com os extremos variáveis em sentidos opostos que se torne idp em sentido absoluto, contém
um elemento fora do campo de variação dos seus elementos.
Vejamos algumas consequências da hipótese da continuidade absoluta:
Teorema 3.34 (101,a) Não pode existir mais que um elemento do segmento 0
que goza da propriedade da hipótese VIII.¤
Dada a variável estritamente crescente, e a variável 0 estritamente decrescente, e orientada no mesmo sentido, se 0 se torna em sentido absoluto
há um só elemento tal que é limite dos dois segmentos variáveis, e não é um
estado das duas variáveis.
78
A Geometria Não-Arquimediana segundo Veronese
Definição 3.7 (Sistema contínuo em sentido absoluto) Um sistema que satisfaz a
hipótese VIII, é dito contínuo absoluto, enquanto que os outros serão chamados
discretos absolutos.
Teorema 3.35 (101,b) Um sistema homogéneo contínuo em sentido absoluto é contínuo relativamente a todo o segmento dado como unidade de medida ou, por outras
palavras: se é satisfeita a hipótese VIII fica também satisfeita a hipótese VI em
relação a qualquer unidade.¤
Veronese complementa este teorema com a observação seguinte:
Entre dois estados consecutivos de um segmento variável e 0
basta considerar aqueles pelos quais os extremos e 0 são distintos,
pois que de contrário e 0 coincidem em sentido absoluto. Os estados sucessivos portanto da variável em sentido absoluto estritamente
crescente ou estritamente decrescente podem ser indicados com números
cada vez maiores da sucessão (II).[72]34
A seguir exibimos alguns resultados de caracterização da continuidade absoluta,
segundo o próprio Veronese.
Teorema 3.36 (102,a) Se é um segmento limite de um segmento variável
tem-se:
lim =
com lim = Ω¤
Teorema 3.37 (102,b) Dada a variável estritamente crescente (crescente) e a
variável decrescente (estritamente decrescente) 0 em sentido absoluto, e todo o
segmento representando o menor (maior) dos estados de [ 0 ], pertence à
variável [ 0 ], o segmento 0 torna-se em sentido absoluto.¤
Teorema 3.38 (102,c) O segmento + compreendido entre dois estados sucessivos de e + da variável se for estritamente crescente, ou + se é
estritamente decrescente, e se é o seu segmento limite, com o crescer indefinidamente de torna-se menor que todo o segmento dado.¤
34
Esta observação mostra bem a distinção de papéis entre o axioma de continuidade absoluta
e o axioma de continuidade relativa, dentro da preocupação geral de assegurar uma continuidade
local, relativamente a uma escala, e uma continuidade global, relativamente a qualquer escala. De
facto a continuidade relativa permite estabelecer essa propriedade em relação a uma unidade de
medida dada – e essa é uma grande inovação, a continuidade absoluta, tem um papel comparável
ao axioma de Dedekind, portanto dentro da tradição das escalas absolutas. O primeiro axioma
aparece como imperativo da complexidade da coexistência de diversas escalas e ordens (constituindo
a origem histórica da continuidade em sistemas ordenados muito complexos), o segundo aparece
para estabelecer a normalidade, no quadro habitual, em que se considera apenas uma unidade
absoluta e uma ordem total.
3.3
Geometria Não-Arquimediana de Veronese
79
Teorema 3.39 (102,d) Um segmento variável estritamente crescente (ou decrescente) em sentido absoluto tem sempre um e um só segmento limite maior (ou
menor) que todo o estado da variável.¤
Corolário 3.7 Se duas sucessões estritamente crescentes ou decrescentes em sentido absoluto de segmentos respetivamente iguais determinam dois segmentos e
0 0 , estes segmentos são iguais em sentido absoluto.¤
Definição 3.8 Um elemento diz-se um elemento limite absoluto de uma sucessão
de elementos 1 2 = ( ) ordenado segundo um sentido da forma fundamental, quando em todo o segmento tão pequeno quanto se queira dado, existe
um elemento da sucessão.
Teorema 3.40 (102,e) Se é um segmento limite absoluto de um segmento variável o elemento é o elemento limite absoluto da série dada pelos elementos
¤
3.3
Geometria Não-Arquimediana de Veronese
A geometria de Veronese é baseada no isomorfismo entre uma reta geométrica e o
conjunto numérico II.
Antes de procedermos a uma breve digressão pelas ideias básicas da Geometria
Não-Arquimediana de Veronese, vamos apresentar a lista completa dos seus axiomas,
com vista a fornecer ao leitor uma antevisão das bases fundacionais dessa geometria,
mas também para que as referências que fazemos sejam facilitadas35 .
Lista dos axiomas
Veronese distingue entre axiomas, hipóteses, e axiomas práticos. Os primeiros
são proposições sugeridas diretamente pela experiência; os segundos não são sugeridos pela experiência mas são proposições que, não estando em contradição com
os axiomas, ajudam a edificar a teoria; os terceiros são meros guias para aplicações
práticas, sugeridos por estas e visando as mesmas.
Tem-se então:
Axioma I (V-1): [p. 210] Existem pontos distintos – Todos os pontos são
idênticos.
Axioma II a)(V-2a))[p. 214] Existe um sistema de pontos a uma dimensão
idêntico na posição das suas partes, determinado por dois dos seus pontos distintos
e contínuo.
Axioma II b)(V-2b) [p. 216] Existem pontos fora da reta. Todos os pontos
que não pertencem à reta determinam com todo o ponto da reta uma outra reta.
Axioma III (V-3)[p. 221] Se duas retas quaisquer têm um ponto comum , e
um segmento duma delas, existe um segmento idêntico 0 da outra.
35
No B encontra-se uma lista alternativa, onde se tenta a separação, o reagrupamento e uma
ordenação dos axiomas de Veronese, na esteira da tradição Hilbertiana.
80
A Geometria Não-Arquimediana segundo Veronese
Axioma IV (V-4) [p. 223] Se um lado de um triângulo qualquer torna-se
indefinidamente pequeno, a diferença entre os outros dois torna-se indefinidamente
pequena.
Axioma V(V-5) [p. 240] Se em dois pares de raios quaisquer ; 0 0 0 0
se escolher dois pares de pontos e , 0 e 0 tais que
≡ 0 0 ;
≡ 0 0
e o segmento seja idêntico a 0 0 , os dois pares das retas são idênticas.
Hipóteses e axiomas práticos
Hipótese I (V-H1) [p. 244]. A reta é um sistema de pontos a uma dimensão
idêntica na posição das suas partes, contínuo absoluto e determinado por dois dos
seus pontos distintos.
Hipótese II (V-H2) [p. 245]. Duas retas coincidem em sentido absoluto se têm
em comum o campo relativo a uma unidade qualquer, a partir de qualquer ponto
tomado como origem.
Hipótese III (V-H3) [p. 248]. No campo finito absoluto à volta de um ponto
são válidos os axiomas II b), III, IV e V.
Hipótese IV (V-H4) [p. 251]. Duas retas distintas quaisquer num campo
finito à volta (na vizinhança) de um ponto e passantes por são distintas, ainda
que em todo o campo infinito ou infinitésimo em relação à unidade desses campos,
e inversamente.
Hipótese V (V-H5) [p. 262]. Uma reta é uma linha fechada.
Axioma prático I (V-P1) [p. 262]. No campo das nossas observações atuais
é verificada com grande aproximação a propriedade de que por um ponto se pode
conduzir uma e apenas uma paralela a uma reta dada. (Axioma hiperbólico de
paralelismo).
Hipótese VI (V-H6) [p. 266]. Sobre uma reta existem cópias de pontos que
não a determinam.
Axioma prático *II (V-P2*) [p. 279] Um corpo pode mover-se sem deformação (existência de movimentos rígidos, ou isometrias).
Axioma prático II( V-P2) [p. 279] Os pontos de uma figura qualquer podem
mover-se livremente e independentemente uns dos outros, descrevendo cada um deles
uma linha intuitiva, de modo que as posições dos pontos da figura correspondem
univocamente e na mesma ordem às posições sucessivas, mas não excluindo que
muitos pontos possam ocupar o mesmo lugar numa posição sucessiva.
Hipótese VII (V-H7) [p. 361] A figura retilínea determinada por duas retas
quaisquer passantes por um ponto em todo o campo finito na vizinhança de
permanece a mesma, relativamente à unidade desse campo, mesmo quando se consideram os pontos nos campos no infinito ou nos campos infinitésimos na vizinhança
do referido ponto sobre as duas retas.
Axioma prático III(V-P3) [p. 454] O espaço intuitivo é uma figura a três
dimensões em relação aos seus pontos.
3.3
Geometria Não-Arquimediana de Veronese
3.3.1
81
Elementos
O ponto
A geometria de Veronese começa na primeira parte dos Fondamenti, livro I.
A introdução é feita no §1 com os seguintes títulos: Ponto – axioma I – figura
(geométrica) – espaço geral – Geometria. Sistema de pontos a uma dimensão.
A epistemologia de referência é lançada no n 1, naquilo que Veronese chama
“Observações empíricas”, que, como explica em nota de rodapé, servem para estabelecer os axiomas, mas não são tidas em conta no enunciado das propriedades e
nas demonstrações geométricas, nas quais apenas se recorre a resultados que, independentemente dessas considerações empíricas, são estabelecidas nos axiomas [72].
Nessas considerações o autor considera que
– Existe um espaço intuitivo ou ambiente externo [ao geómetra] que é onde se
encontram os objetos que, são apreendidos através dos sentidos;
– Os objetos ocupam um lugar [locus] ou posto no espaço intuitivo;
– No entanto, o lugar ocupado por um corpo, é independente desse corpo (ontologicamente anterior e posterior ao mesmo);
– O lugar não ocupado por um corpo, ou se deste se faz abstração, é vazio –
o que não implica a existência efetiva de um lugar vazio;
– O vazio (ou lugar vazio) não é nulo36 ;
– O vazio é imóvel;
– Objeto de estudo da geometria, é fornecido efetivamente no espaço intuitivo,
por exemplo, como extremidade de um fio: resulta da abstração das suas qualidades
físicas, e é o que separa duas partes consecutivas.
Tem-se então a
Definição 3.9 (ponto) O elemento fundamental que compõe as formas chama-se
ponto.
Ou ainda: ponto é o objeto que compõe todos os outros objetos ou as suas
representações.
Como observa, a intuição do ponto leva a que todos os pontos sejam idênticos,
o que porém é fixado em axioma:
AXIOMA I. Existem pontos distintos [não coincidentes]. Todos os pontos são
idênticos.
Definição 3.10 (figura geométrica) Toda a forma [geométrica] cujo elemento
fundamental é o ponto chama-se figura ou ente geométrico.
Uma figura é, portanto, um conjunto, no sentido Veronesiano, de pontos, no
sentido Veronesiano, e aplica-se-lhes as operações definidas para conjuntos: reunião,
intersecção, etc...
Uma definição importante para a compreensão do pensamento Veronesiano37 é
o de espaço geral:
36
37
Não se percebe em que sentido.
Embora o próprio diga que se pode fazer toda a sua geometria sem essa noção [72].
82
A Geometria Não-Arquimediana segundo Veronese
Definição 3.11 O espaço geral é um sistema [ou conjunto] de pontos tal, que dada
ou construída nele uma figura, existe sempre um ponto [do espaço geral] fora da
mesma38 .
Em consequência trata-se, por definição, de um espaço infinito, quanto ao número
de elementos39 , e repete-se o tipo de raciocínio, clássico em Veronese, que está
presente na definição de forma fundamental. No entanto esta definição contém um
axioma implícito:
– Existe um espaço tal que, existe sempre, pelo menos um ponto fora
de qualquer figura, dada ou construída nesse espaço.[72]
Este axioma é correspondente à hipótese VIII sobre a forma fundamental. De
fato, o espaço geral parece ser uma espécie de forma fundamental, multidimensional.
Neste ponto Veronese introduz a sua definição de geometria
Definição 3.12 A geometria é a ciência do espaço geral.
A operacionalização da definição é feita na observação seguinte:
– O objetivo da geometria é a construção de figuras concretas no
campo da nossa observação externa.[72].40
Esta sentença justifica a firmação de Veronese de que a geometria é “a mais
exata das ciências experimentais”. Com efeito, Veronese acaba de apontar para a
geometria um objetivo completamente fora do quadro do idealismo platónico – que
constitui um meio e não um fim: a atuação no meio que envolve o homem.
Definição 3.13 (figura a uma dimensão) Uma figura a uma dimensão é um sistema de elementos a uma dimensão41 cujos elementos são pontos.
A unificação das abordagens clássicas da geometria, estática e dinâmica, é feita do
seguinte modo: os elementos de um sistema a uma dimensão podem ser consideradas
como posições diversas de um só elemento do sistema42 , donde se pode dizer, sem
introduzir novos princípios, que os pontos de um sistema a uma dimensão, são
posições diversas de um ponto que se move sobre o sistema. Pela mesma razão ,
se se considerar os pontos consecutivos 1 2 do sistema, pode-se dizer que
os segmentos 1 1 2 são posições diferentes de um mesmo segmento que
38
É inesgotável através de meios humanos, físicos ou mentais.
O que não implica a existência de qualquer escala.
40
É absolutamente contrária à tradição euclidiana a consideração de dois campos geométricos:
um campo abstrato e um campo da observação externa, isto é, físico. Porém, não se trata de uma
colocação inédita, podendo ser identificada em Arquimedes, Galileu, Helmholtz, entre outros.
41
Um sistema a uma dimensão é um conjunto totalmente ordenado, embora Veronese não tenha
dado explicitamente essa definição, como se viu em 4.5.
42
Translações dum elemento.
39
3.3
Geometria Não-Arquimediana de Veronese
83
se move (ou se escorre) sobre o sistema, sem que disso derive a identidade desses
segmentos e a continuidade do referido sistema, e sem que esta expressão dependa
do movimento real dos corpos.
Observe-se que com estas considerações, Veronese define a translação de um
segmento que, ao longo da mesma, pode mudar de comprimento (casos de não
homogeneidade) e, por não ser forçosamente uma operação contínua, é quantificada,
isto é, pode-se fazer aos saltos.
Aplicando o conceito de movimento, Veronese define um sistema linear fechado
(no qual um elemento em movimento num determinado sentido volta ao ponto de
partida) e sistema linear aberto (no qual um elemento em movimento num determinado sentido não volta ao ponto de partida).
A reta
A reta deve ser a concretização (isto é, uma realização “material”) da forma
fundamental, é introduzida através da fixação do
AXIOMA II a) Existe um sistema de pontos a uma dimensão idêntico na
posição das suas partes, determinado por dois dos seus pontos distintos, e contínuo.
Definição 3.14 O sistema a que se refere o axioma acima, chama-se linha reta
ou reta.43
Observe-se que o axioma IIa é um axioma de metrização, tal como o axioma A4
de Birkhoff [capítulo 10] pois através dele se postula a existência de uma reta com
a mesma estrutura que a forma fundamental. Estabelece portanto um isomorfismo
entre a forma fundamental (o conjunto II) e a reta geométrica.
Uma observação importante é a seguinte: este axioma fixa a existência de uma
reta determinada por dois quaisquer dos seus pontos (distintos), tal como em Hilbert,
isto é, existe, pelo menos, uma reta Hilbertiana. Não está em contradição com a
hipótese VI (mais adiante), que é também um resultado de existência (existem pares
de pontos que não definem uma reta não Hilbertiana), pois em Veronese existem
dois tipos de retas.
Outras propriedades são consequências do axioma acima:
AXIOMA II b) Existem pontos fora da reta. Todo o ponto que não pertence à
reta determina com todo o ponto desta uma outra reta.
Obs: se o ponto está “alinhado” com a reta, determina uma nova reta, com duas
sub-retas "alinhadas", e assim sucessivamente para cada ponto considerado fora das
novas retas; se o ponto não estiver “alinhado” com a reta, então definem um plano.
43
Observe-se que a reta de Veronese é constituída por pontos, tal como a de Euclides ou a
de Hilbert. O que é diferente entre elas é a estrutura, que no caso de Veronese, comporta a
existência de segmentos infinitesimais atuais, graças ao isomorfismo entre ela e o conjunto dos
números II. O facto de Veronese dizer que o ponto é apenas uma marca na reta , e não seu
elemento, não é contraditório com a definição de reta acima apresentada, se se considerar que a
afirmação de Veronese implica (como é intuitivamente verdade) que num segmento há um número
potencialmente infinito () de pontos, e consequentemente de segmentos delimitados por eles.
84
A Geometria Não-Arquimediana segundo Veronese
3.3.2
Alguns resultados
Teorema 3.41 Se dois pontos não determinam uma reta, toda a reta que contem
um contém também o outro [estão infinitamente próximos].¤
Corolário 3.8 Se 3 pontos não estão numa dada reta determinam dois a dois 3
retas.¤
Corolário 3.9 Os pontos que com um ponto dado não determinam uma dada reta
não a determinam entre si.¤
Teorema 3.42 Se um ponto de uma reta não determina com outro ponto da mesma,
essa reta, então todo o ponto da reta tem essa propriedade, e a partir de um ponto,
num e noutro sentido, existem infinitos segmentos iguais consecutivos cujos extremos
não determinam a reta.¤
Teorema 3.43 Um segmento pertence a uma e uma só reta.¤
Teorema 3.44 Todo o ponto está situado em muitas retas distintas.¤
Teorema 3.45 O conjunto das retas passantes por um ponto, determinam o espaço
geral.¤
Congruência de segmentos
A iniciação à relação de congruência é feita no §3.
Definição 3.15 Comprimento de um segmento é o segmento considerado
como substituível por um segmento idêntico, em toda união com outros segmentos.
É oportuno observar que a falta de clareza é evidente nesta definição, central
nesta secção. Com efeito, comprimento dum segmento é considerado um estado
do segmento : é quando ele é considerado substituível por um idêntico nas uniões,
isto é por outro segmento com as mesmas propriedades, exceto a posição. Acaba-se
por chegar à conclusão de que o comprimento de um segmento é uma propriedade
comum aos segmentos com todas as propriedades comuns, exceto a posição. É
legítimo questionar se a outras propriedades, como a de terem ou não a mesma
reta suporte, foi considerada. De fato, ou não é considerada e estamos face a um
erro de definição, ou é considerada como estando incluída na diferença de posição,
e esta diferença passa a incluir mais do que uma propriedade, (possivelmente um
conjunto infinito delas) e está-se face a uma estratégia pouco clara. Todavia podese encarar esta definição como indicando que o comprimento do segmento é
o representante canónico de uma classe de equivalência de segmentos equivalentes
(isto é, iguais, exceto na posição)
Definição 3.16 O comprimento de é a distância dos extremos do segmento .
3.3
Geometria Não-Arquimediana de Veronese
85
O exemplo apresentado é algo confuso:
Exemplo 3.1 Dados dois segmentos = 0 0 , 1 1 = 01 10 situados ou não na
mesma reta, em geral a cópia 1 1 pode não ser idêntica à cópia 0 0 , 01 1 ,
mas considerando apenas o comprimento dos segmentos tem-se que as duas cópias
de comprimentos são iguais.
A ideia de congruência de segmentos é ontologicamente anterior à de comprimento, pois vem da identidade. O problema aqui é não haver nenhum critério nem
axioma geométrico que permita decidir duma identidade. Veronese deixa a cada
um a capacidade de comparar e decidir se todas as propriedades dos objetos em
comparação são ou não as mesmas (axioma implícito AIO-I, AIO-II, ver anexo
III).
Teorema 3.46 Se os comprimentos de dois segmentos sobre a mesma reta são
iguais, os dois segmentos são iguais44 .¤
Trata-se de um teorema métrico. A abordagem veronesiana da congruência é
métrica.
Definição 3.17 Segmento de dois pontos sobre uma reta aberta é o segmento que
os dois pontos determinam sobre a reta. Segmento de dois pontos sobre uma
reta fechada é o menor dos dois segmentos e do mesmo sentido determinado
pela sequência , sobre a reta.
A primeira parte da definição é desnecessária, a segunda está errada pois dois
pontos sobre uma reta fechada não determinam na mesma um sentido.
Definição 3.18 A reta tem dois sentidos. A reta percorrida num determinado sentido é chamada de raio, e portanto tem dois raios, cujos pontos coincidem. Os raios
de uma reta dizem-se opostos
Definição 3.19 Dois raios coincidem quando pertencem à mesma reta e têm o
mesmo sentido.
Nota 3.1 i) Um raio não é uma semirreta, mas uma reta orientada;
ii) É interessante a introdução deste elemento na geometria. Mas impõe-se uma
questão: quando é que dois raios sobre uma mesma reta e com o mesmo sentido são
diferentes? Na definição de raio há um elemento cinemático – percorrer – que é
logo substituído por um estático: um raio é constituído por pontos.
44
Em que sentido? Se os comprimentos são iguais, os segmentos têm todas as propriedades
comuns, exceto a posição, sendo portanto equivalentes. Segmentos equivalentes, são congruentes,
em linguagem moderna.
86
A Geometria Não-Arquimediana segundo Veronese
3.3.3
Congruência de figuras
Para garantir a congruência de todas as retas e começar a explorar a congruência
de figuras no plano, Veronese inicia o § 4. O principal instrumento do parágrafo, e
fundamental no resto do texto é o
Axioma III – Se duas retas quaisquer têm um ponto comum , o segmento
duma delas é idêntico congruente a um segmento 0 da outra.
Este axioma é muito importante pois permite a realização de transformações
geométricas no plano, ao determinar a existência de translações não deslizantes, isto
é, aplicações duma reta noutra.
Como resultado imediato, tem-se o
Teorema 3.47 Todas as retas são idênticas.¤
Definição 3.20 (figura retilínea) Uma figura retilínea de um sistema ou de muitos
sistemas distintos de pontos, entenderemos a individualidade dos segmentos que têm
por extremo os pontos dados, e os segmentos determinados pelos pontos dos segmentos anteriores e assim por diante.
Uma figura retilínea de um conjunto de pontos é o seu envolvente convexo. Tem
portanto as seguintes propriedades:
– É um conjunto convexo;
– É conexo.
Trata-se de um polígono convexo ou simplexo.
Segue-se uma definição importante
Definição 3.21 (triângulo) A figura retilínea determinada por 3 pontos ,
não colineares chama-se triângulo, de vértices e lados , e .
Antes de continuar a teoria dos triângulos (congruência, semelhanças, ...) Veronese
demora-se um pouco para fazer a transferência da topologia da forma fundamental
para a reta. Inicia esse assunto no §5. Tem-se:
Definição 3.22 (vizinhança) Por vizinhança de um ponto dado entende-se o
conjunto determinado por todos os segmentos retilíneos que emanam de iguais45
a um segmento qualquer dado tão pequeno quanto se queira. A distância 2
chama-se amplitude da vizinhança de .
Nota 3.2 A noção de vizinhança está aqui definida num sentido absoluto, independente de unidades. Com efeito, é um segmento de comprimento indefinidamente
pequeno, e não , relativo a uma certa unidade.
45
Congruentes.
3.3
Geometria Não-Arquimediana de Veronese
87
Definição 3.23 (ponto limite) Um ponto diz-se ponto limite de um conjunto de
pontos () ou de uma sucessão de pontos ( ) quando, em toda a vizinhança de ,
de amplitude arbitrariamente pequena, existe um ponto de () ou ( ). No caso da
sucessão diz-se também que um ponto da sucessão se aproxima indefinidamente do
ponto .
Trata-se da definição clássica de ponto limite ou de acumulação.
Teorema 3.48 Num conjunto qualquer () que tem ponto limite existe uma
sucessão ( ) de pontos que tem por limite .¤
Definição 3.24 A expressão: um triângulo variável ou com lados variáveis equivale
à seguinte: uma sucessão de triângulos 4, 40 0 0
Esta definição coloca o problema da variabilidade dos lados de um triângulo. O
axioma seguinte «domestica» esse problema:
Axioma IV. Se um lado de um triângulo qualquer se torna indefinidamente
pequeno, a diferença dos outros lados se torna também indefinidamente pequena.
O §6, intitulado “conjuntos de pontos que, dois a dois, podem não determinar
uma reta dada” reveste-se de grande interesse, pelas diferenças que introduz em
relação à geometria de Hilbert:
Teorema 3.49 Se dado um conjunto () de pontos da reta tal que:
1 escolhido um segmento qualquer cujos extremos sejam pontos do conjunto, os
extremos dos segmentos consecutivos, iguais ao dado, num dado sentido, a partir de
qualquer ponto do conjunto tomado como origem, pertencem ao referido conjunto;
2 um ponto de () não tenha um primeiro ponto consecutivo do conjunto no
sentido dado; em todo o segmento de reta, tão pequeno quanto se queira da, existe
sempre um ponto do conjunto.¤
Corolário 3.10 Todo o ponto da reta, que não é ponto de () é ponto limite do
conjunto ().¤
Teorema 3.50 Todo o conjunto () de pontos que, dois a dois, não determinam a
reta, contém os seus eventuais pontos limite.¤
Teorema 3.51 Os pontos de um segmento que com um dos seus extremos, por
exemplo , não determinam uma dada reta, não podem ser em número infinito.¤
Teorema 3.52 a) Os segmentos consecutivos de uma sucessão de pontos, que com
um ponto dado determinam uma dada reta, são iguais entre si, em qualquer reta que
contenha a sucessão dada;
b) Os segmentos determinados por dois pontos quaisquer da sucessão, em duas
retas passantes por eles, são iguais.¤
88
A Geometria Não-Arquimediana segundo Veronese
Teorema 3.53 a) Dois conjuntos de pontos, cada um dos quais não determina uma
reta, estão situados numa só reta (determinam uma reta);
b) Os segmentos que têm por extremo, duas cópias de pontos consecutivos, que
não determinam uma reta, são iguais.¤
Esta ideia de existirem pontos distintos de uma reta, mas que não a determinam
parece ser nova. São pontos infinitamente próximos. Evidentemente, não se encontra
em Hilbert.46
Continuando no mesmo registo, Veronese passa para o §7.
Definição 3.25 Um segmento retilíneo diz-se limite de uma sucessão de segmentos retilíneos dados , se os pontos e são pontos limite dos pontos e
, supondo que os pontos e determinam a reta.
3.3.4
Geometria Não-Arquimediana de Hilbert versus Geometria Não-Arquimediana de Veronese
Segundo Ehrelich [25] primeira comparação entre as geometrias de Hilbert e Veronese
foi feita por Bidoni na sua tese de doutoramento, e dizia respeito, sobretudo, à
diferença de métodos adotados pelos dois geómetras: Hilbert, com uma preocupação
formal e minimalista, Veronese com uma preocupação intuicionista e maximalista.
Muitas são, com efeito, as diferenças. Contudo vamos fazer uma breve análise
duma diferença essencial entre a Geometria de Hilbert e a de Veronese, que advém
do conceito de escala.
retas com estruturas diferentes
Um dos axiomas propostos por Veronese (hipótese VI) é o seguinte: «– Existem
(pares de) pontos que não definem uma reta».
Este axioma está em aparente contradição com os axiomas de incidência de
Hilbert, em particular, com o axioma I1 (dois pontos quaisquer definem uma reta
Hilbertiana). Com efeito, em Hilbert, o que caracteriza a reta é apenas a sua
“linearidade” ou “direção”. Mas em Veronese, para além da “direção” existe outra
propriedade fundamental da reta: a sua estrutura47 . Essa estrutura é imposta pelas
diversas escalas (Não-Arquimedianas) possíveis, enquanto que em Hilbert só existe
uma escala (Arquimediana), pelo que é desnecessário falar em escalas – donde
resulta que não há diferença de “estrutura” (ver o capítulo 9).
46
Ela nem é consequência nem contradiz os axiomas de incidência de Hilbert. Com efeito,
quando se está apenas nas geometrias de Incidência, ordem e congruência de Hilbert, já se viu que
o axioma de Arquimedes é independente. Na ausência desse axioma, existem elementos . Logo,
a existência de segmentos (que não determinam a reta em que se encontram) é independente
dos axiomas I, II e III de Hilbert.
47
Em Hilbert as retas são absolutamente homogéneas. Em Veronese, há que considerar a “distribuição” dos pontos na reta, ou mais precisamente, a distribuição dos sub-conjuntos “densos” de
pontos.
3.3
Geometria Não-Arquimediana de Veronese
89
Vários tipos de retas
Assim, em Veronese há vários tipos de retas: as retas a uma só escala (Arquimediana)
determinadas por dois quaisquer dos seus pontos, iguais às retas de Hilbert (existe
pelo menos uma), e as retas a várias escalas (Não-Arquimedianas) que consistem
em retas constituídas por retas a um número qualquer de escalas, nas quais existem
pares de pontos que não a determinam. Assim, pode-se considerar que em Veronese
há retas de tipo I, as que possuem apenas uma escala Arquimediana; as retas de
tipo II, constituídas por retas de tipo I “alinhadas”, separadas por “buracos” de
tipo I, as retas de tipo III, constituídas por retas de tipo II, “alinhadas”, separadas
por “buracos” de tipo II, enfim, em geral, retas de tipo constituídas por retas de
tipo − 1, alinhadas, separadas por “buracos” de tipo − 1 (ver o capítulo 9).
As retas Hilbertianas são apenas um tipo de retas Veronesianas, as de tipo I, e
constituem partes localizadas de uma reta de Veronese.
Pontos que não “definem” uma reta
Seja uma reta de Veronese do tipo II. Sejam dados dois pontos distintos,
pertencentes à mesma reta , de tipo I contida em . É evidente que e definem
a “direção” de , mas não a sua “estrutura”. O segmento não inclui todos os
tipos de segmentos de (o que seria uma forma de caracterizar a estrutura de ). Seja
agora um ponto de situado numa “sub-reta” de , componente de , disjunta
de . O segmento já possui uma estrutura que permite adivinhar, por simetria,
a estrutura de : inclui sub-segmentos com um “buraco” (como os “buracos” de ) e
sub-segmentos sem “buracos” (como os subsegmentos Arquimedianos de ). Podese dizer que o segmento caracteriza por dar, não apenas a sua direção, mas
também a sua estrutura48 , ao contrário de .
Daí a necessidade de Veronese em postular a existência, numa reta, de pontos
que não a definem, no sentido em que o segmento que une esses dois pontos não
espelha, como a direção, a estrutura da reta49 .
Pode-se dizer que: dada uma reta de tipo , e dois pontos e de , e
definem se puder ser construído a partir duma translação do segmento –
isto é, se contém toda a estrutura local de .
Uma conciliação imediata entre os dois pontos de vista
Sabe-se, portanto, que a estrutura (micro)local de qualquer reta de Veronese, é uma
reta de Hilbert, isto é, a apenas uma escala, portanto, Arquimediana. Assim, uma
adaptação adequada dos axiomas de Hilbert, com vista à sua “localização” resultaria
numa axiomática que descreve as retas de Veronese.
48
A reta pode ser reconstruída por “translação” do segmento , pelo que este pode ser
considerado um segmento “quociente”.
49
Para Hilbert, a “direção” é a única característica da reta.
90
A Geometria Não-Arquimediana segundo Veronese
É claro que os axiomas da geometria absoluta de Hilbert, não incluindo o axioma de Arquimedes, possuem intrinsecamente o germe das retas de Veronese. A
conciliação de que aqui se fala, é apenas em termos de linguagem e de métodos.
O axioma I3, linearização e dimensão
Há um grande paralelismo entre o conceito de “fora” em Veronese [hipótese V2b:
existe pelo menos um ponto fora da escala gerada por uma unidade qualquer] e o
mesmo conceito em Hilbert, por exemplo, no axioma I3 (para se ficar no caso mais
simples). Com efeito, o axioma I3 diz que existem três pontos não na mesma reta,
isto é, dada uma reta existe sempre um ponto fora dela. Ora mesmo quando se
consideram os modelos de I1, I2, I3, nada garante que o ponto considerado fora
da reta , não seja “colinear” com . É evidente a intenção de Hilbert: o ponto
definirá com um “plano”, isto é, haverá um aumento de dimensão, aliada à perda
(assumida) de linearidade. Ora, sejam um ponto fora de (que existe, por I3),
dois pontos distintos de . Por I1, define com uma reta e com uma
reta . A relação de com e depende do seguinte fato crucial: é ou não é
colinear com e . A definição usual de colinearidade, em Hilbert é a seguinte:
– Três pontos são colineares se pertencerem à mesma reta.
Mas reta é um conceito primitivo, que exatamente se pretende caracterizar com
os axiomas I1—I3.
Para a demonstração de que e são diferentes entre si, é crucial a consideração
de que não é colinear com e , isto é, não está na mesma reta. O conceito
de colinearidade e o de reta são equivalentes, em Hilbert.
Para Veronese, tudo se passa de forma diferente: a colinearidade50 é um conceito
primitivo, diferente do de reta, uma vez que o primeiro é absoluto, e o segundo
é relativo: as retas não são todas localmente isomorfas entre si, o que leva à sua
classificação, e consequente relativização. Assim, pontos colineares podem ou não
estar na mesma reta, isto é, em retas do mesmo tipo. Assim, para o caso acima,
haveria que se distinguir dois sub-casos: não colinear com e , e nesse caso
tudo se passa à moda Hilbertiana; é colinear com e , e nesse caso pertence
a uma reta com e , mas de tipo diferente (superior) ao tipo da reta definida
apenas por e : por exemplo, não pertence ao campo comum de e (igual
←→
à reta Hilbertiana )
No meio desta discussão, o conceito “usual” de dimensão é afetado, pois a reta
definida por (segundo sub-caso) não tem dimensão “usual” diferente da da reta
←
→
definida por . Em existem segmentos comensuráveis entre si e segmentos
incomensuráveis entre si. Porém, por se tratar duma reta, geralmente se lhe atribui
←
→
a dimensão usual de um. Mas comparando a reta com um plano euclidiano usual
←→
(o definido por e ∈
(primeiro sub-caso), as semelhanças são mais que
muitas: são ambos gerados por uma reta (usual) e um ponto fora dela; têm ambas
duas classes de subconjuntos, umas comensuráveis entre si (os segmentos entre si, as
50
Ordem total absoluta, suporte de qualquer forma linear.
3.4
Conclusões
91
áreas entre si) e outras incomensuráveis entre si; possuem ambas duas classes Arquimedianas. Parece que têm a mesma estrutura (isomorfos), sendo um linear e outro
não. Assim sendo, porque não assumir o isomorfismo (de ordem), e consequentemente, que uma reta de Veronese pode ter um aspeto de “plano (Hilbertiano)” e um
“plano” pode ter um aspeto linear?51
Assim, um conceito de dimensão possível seria o de número de classes Arquimedianas, retirando desse conceito qualquer intuitividade espacial52 .
3.4
Conclusões
A abordagem dos fundamentos da geometria por Veronese, assenta nos seguintes
princípios:
– A geometria é uma ciência experimental, mas exata: como tal deve procurar
não fugir da intuitividade empírica, mas essa intuitividade não deve estar refletida
nos axiomas. Estes devem reger-se pelos princípios lógicos de consistência e independência, e todas as hipóteses não contraditórias com os axiomas e independentes
deles, podem ser adicionadas, com vista ao desenvolvimento da própria Geometria;
– As hipóteses da dimensão três, de Arquimedes e de que a reta é aberta, não
são necessárias aos fundamentos da Geometria, mas apenas contingentes.
Como método para a Geometria, Veronese assume a via (sintética) métrica,
mas para a construção do seu corpo numérico (II) escolhe a via sintética pura,
na esteira de Eudóxio e Euclides, porém abandonando explicitamente o axioma de
Arquimedes. Com efeito, Veronese sabe que, desde Descartes, é importante poderse atribuir, numa Geometria, a cada ponto, uma lista de números, ditas as suas
coordenadas. Embora defenda a via sintética para a construção dos fundamentos,
visa – tal como Hilbert veio a fazer mais tarde – um isomorfismo entre um corpo
numérico e uma reta, que venha mais tarde a possibilitar o desenvolvimento da
Geometria Analítica. Essa abordagem, que é, mais tarde, explicitada por G. D.
Birkhoff, foi a escolhida por Veronese, apenas com uma dificuldade acrescida: a de
não haver um corpo numérico Não-Arquimediano satisfatoriamente construído, tal
como o corpo (Arquimediano) dos números reais, no tempo de Birkhoff. Assim, boa
parte da investigação de Veronese, assim como cerca de um terço dos Fondamenti
são dedicados à construção (sintética) dos seus corpos numérico e de segmentos
Não-Arquimedianos.
Tendo o corpo de referência, Veronese inicia a sua geometria por axiomas de
existência de pontos e retas, mas imediatamente impõe um axioma de metrização,
para a transferência da estrutura do seu corpo numérico para a reta.
O resto da geometria de Veronese que não foi analisado, desenvolve-se com as
preocupações acima referidas: espaço -dimensional, tendo-se atardado na dimensão
51
Tudo isso, é claro, longe da atitude logicista que consiste em considerar que pontos rectas e
planos podem ser “mesas cadeiras ou canecas de cerveja”. Trata-se duma discussão absolutamente
dentro da intuição geométrica empírica (ver capítulo 9).
52
O que é indiscutivelmente benéfico para a Geometria.
92
A Geometria Não-Arquimediana segundo Veronese
4, como que à procura de uma intuição gráfica (que se pode dizer, muito bem
conseguida), projetividade e Não-Euclidianismo.
Pode-se dizer que Hilbert e Veronese fizeram muitas jornadas juntas, mas nos
pontos de separação, Veronese tem ambições profundamente diversas das de Hilbert:
este é “logicista” e minimalista, aquele é “intuicionista” e maximalista.
Parte II
Análise Não-Standard e
Geometria Não-Standard
93
CAPÍTULO 4
Métodos da Análise Não-Standard
4.1
Introdução
Neste capítulo recordamos alguns resultados e métodos básicos da Análise NãoStandard (ANS). Na primeira secção fazemos uma breve digressão por uma das
muitas formas existentes de análise com ordens de grandeza1 . Na secção seguinte
introduzimos a ANS Nelsoniana, que será a ferramenta para a proposta de fundamentação da GNS a ser apresentada na parte III desta publicação.
4.2
Análise com ordens de grandeza
As relações de conhecimento e de ação do homem sobre a natureza são balizadas por
aquilo que habitualmente se chama a “escala humana”. Ora, a noção de escala é
suscitada pela operação de medição e a necessária adoção de uma unidade. Trata-se
sem dúvida de um assunto bastante complexo.
A assunção, quase generalizada na matemática, do axioma de Arquimedes, indica
o fato de, na maior parte das vezes, se optar por uma só ordem de grandeza. No
entanto, a voz gritante das aplicações (Física, Ciências da Natureza, etc.) que
reclamam constantemente mais que uma ordem de grandeza, permitiu que a questão
das escalas com diversas grandezas, ou ordens de grandeza, estivesse sempre na
ordem do dia, e se tenha desabrochado sob a forma das modernas teorias de ordens
de grandezas.
Nesta secção vamos rever alguns resultados de uma análise com ordens de grandeza,
num conjunto que inclui o dos números reais. Também veremos algumas aplicações.
4.2.1
Ordens de grandeza no conjunto dos números reais
A definição de ordens de grandeza no conjunto dos naturais faz-se de forma relativamente simples: sejam denominados números naturais standard os números naturais
1
Trata-se de uma forma utilizada pela escola de Georges Reeb, muito divulgada por Francine e
Marc Diener [22], Imme van den Berg [70], Franco Oliveira e outros.
95
96
Métodos da Análise Não-Standard
intuitivos fundados na Aritmética clássica; os outros serão números naturais nãostandard. Qualquer natural menor que algum natural “standard” é também “standard” e do mesmo modo qualquer natural maior que algum natural “não-standard”
também é “não-standard”. Os naturais não-standard são chamados infinitamente
grandes, ou ilimitados, por serem maiores que qualquer natural standard.
Têm-se assim as seguintes ordens de grandeza:
– Números naturais infinitamente grandes, ou não-standard;
– Números naturais não infinitamente grandes, ou standard.
Para os números reais, a situação é mais complexa:
Definição 4.1 (número infinitamente grande ou ilimitado) Um número real
é infinitamente grande () ou ilimitado, se seu valor absoluto || é maior que
qualquer natural standard, , isto é,
é ⇔ || ∀ ∈ N standard
Exemplo 4.1 Um número natural não-standard é um número real ilimitado;
Exemplo 4.2 + 1 , é um número real ilimitado não natural, se é real ilimitado.
No conjunto dos números reais há números “não-standard”, para além dos números
naturais não-standard. Entre eles estão os infinitamente pequenos não nulos, que
são definidos a seguir.
Definição 4.2 (número infinitamente pequeno) Um número real é infinitamente pequeno (), se o seu valor absoluto || é menor que 1 qualquer que seja
natural standard,
1
é ⇔ || ∀ ∈ N standard
Exemplo 4.3 0 é . É o único standard.
Exemplo 4.4 Sendo ilimitado, =
1
é .
Enunciemos agora um princípio importante para o cálculo com ordens de grandeza:
Axioma 4.1 (princípio de Carnot) Dois números standard cuja diferença é
são iguais.
Este princípio permite, durante a computação de uma quantidade standard,
como um integral ou um limite, por exemplo, fazer estimativas, a menos de uma
quantidade , e desprezar o número correspondente, no término da computação,
tal como faziam Leibniz, Euler, Lagrange, e tantos outros.
Definição 4.3 (número limitado) Um número real é dito limitado () se não
for .
4.2
Análise com ordens de grandeza
97
Exemplo 4.5 Todo o número natural standard é limitado.
Definição 4.4 (número apreciável) Um número real é dito apreciável () se
não for nem nem .
Definição 4.5 (número real não-standard) Um número real não nulo é nãostandard se a sua definição envolve ou , de forma essencial.
Exemplo 4.6 Se é um natural não-standard, os números 1 e 2 são não apre2
ciáveis por serem respetivamente e . Por outro lado ( 3
+ 5) é , mas nãostandard.
Exemplo 4.7 No caso = 0×+1 com um não nulo, tem-se que é standard
( = 1).
Definição 4.6 (números infinitamente próximos) Dois números reais e
são infinitamente próximos (-próximos) e nota-se ≈ se a sua diferença, −
é .
Nota 4.1 Nem todo número real limitado é standard: se 6= 0 é e se é standard,
então := + é limitado mas não-standard (caso contrário a diferença = −
seria standard);
Nota 4.2 A noção de número é diferente da noção de conjunto infinito. Por
exemplo, um conjunto como {0 1 2 } é finito, mas o seu cardinal, +1, é 2 .
Por outro lado, o cardinal de um conjunto infinito não é por definição (de cardinal) um natural, mas é standard se o conjunto for standard.
Proposição 4.1 Todo o número real limitado está -próximo de um único número
real standard. Esse número real é chamado a sombra de ou a parte standard de
é denotado por .
Nota 4.3 A existência da parte standard de um número real é devida ao fato de R
ser completo, no sentido de Dedekind.
Em R, pode-se falar no operador (operador parte standard), para o qual são
válidos os resultados do próximo parágrafo.
As regras seguintes indicam o comportamento do operador em relação às operações elementares e à ordem em R. Tem-se a
2
Conjunto finito com um número infinitamente grande de elementos, tal como previsto por
Veronese.
98
Métodos da Análise Não-Standard
Proposição 4.2 Para ∈ R tem-se
(i) ( + ) = ◦ + ◦
(ii) () = ◦
(iii) ( 1 ) = 1 com ◦ 6= 0
(iv) ≤ ⇒ ◦ ≤
(v) ◦ ⇒
Com base nesta proposição, são usuais as seguintes notações:
/ se ou ou ≈ isto é se ◦ ≤
¿ se não está -próximo de
½ se e ¿ isto é se ◦
4.2.2
Álgebra das ordens de grandezas
As regras de cálculo com ordens de grandezas são muito simples e foram estabelecidas, de forma completa, por Leibniz. Constam das seguintes tabuadas para
operações com ordens de grandeza:
+
×
?
A soma de dois é ; o produto de um por qualquer número também
é um . Por outro lado, sem mais precisão sobre os seus valores, não é possível
determinar a ordem de grandeza da multiplicação de um com um número .
Muitas vezes não é necessário procurar o valor exato de uma grandeza numérica:
basta conhecer a sua ordem de grandeza. Esse ponto de vista foi adotado por Imme
van den Berg e F. Koudjeti, que lhes motivou a introdução de uma nova simbologia.
As notações, ∅, $ @, e ∞ introduzidas por Imme van den Berg, são usadas
como notação genérica para números cujo valor preciso não interessa conhecer, mas
apenas sua ordem de grandeza, respetivamente, para um , um , um positivo, e
um número positivo3 . Por essa razão ocorrências diferentes de um destes símbolos
normalmente não representam números iguais, mas números com a mesma ordem
de grandeza.
Tem-se a
Definição 4.7 { ∈ R : é } = ® { ∈ R : é } = ∞ { ∈ R : é } = @
e { ∈ R : é } = $
3
Impondo a positividade de @ e ∞ obtemos que @ + @ = @ e ∞ + ∞ = ∞ enquanto que
− = e − =?.
4.2
Análise com ordens de grandeza
99
A tradução das regras de Leibniz é imediata:
® ®
$ $ $
@ @ $ $
∞ ∞ ∞ ∞ ∞
+ ® $ @ ∞
®
$
@
∞
×
®
®
®
?
®
$
$ @
$ ∞ ∞
$ @ ∞
Proposição 4.3 Seja um conjunto (standard) limitado de números reais da mesma
ordem de grandeza. Então sup e inf são também dessa mesma ordem de grandeza.
Dem. Basta ver que por definição de sup e inf , existem elementos + ∈
e − ∈ tais que + ≈ sup e − ≈ inf .¤
As regras de Leibniz mostram então que dois números -próximos quaisquer são
da mesma ordem de grandeza.
Corolário 4.1 A totalidade dos números reais duma mesma ordem de grandeza não
pode formar um conjunto standard.
Dem. A suposição de que se pode formar um conjunto ao qual se pudesse aplicar
os teoremas clássicos conduziria a um absurdo. Assim, por exemplo, se os formassem um conjunto standard, como esse conjunto seria limitado, ( por −1 e 1,
por exemplo), o seu limite superior ou supremo 0, existiria: como acaba-se de
demonstrar, esse número seria ; mas + seria então igualmente e 2 , o
que contradiz a hipótese de ser o supremo dos reais . ¤
Corolário 4.2 ® ∞ @ $ não são conjuntos standard.¤
Em particular, tem-se a
Proposição 4.4 −$ = $,
1
@
= @, @ = $, $ = @, $ + $ = $ e ∅$ = ∅.¤
Definição 4.8 (mesma ordem de grandeza) Dois números reais e são da
mesma ordem de grandeza se
= @
Assim a ordem de grandeza de um número real é @ .
Proposição 4.5 A relação “ter a mesma ordem de grandeza”, notada por “ = @”
é de equivalência, e divide R nas seguintes classes:
i) classes dos , ∅= { ∈ R : = @∅}
ii) classe dos
iii) classe dos
iv) classe dos ¤
100
Métodos da Análise Não-Standard
Proposição 4.6 (fatorização das ordens de grandeza) Seja um conjunto finito
de índices, ( )∈ um conjunto de números positivos ou nulos, e ( )∈ números reais
com a mesma ordem de grandeza, e do mesmo sinal se esta ordem de grandeza é
ou . Então existe um número real da mesma ordem de grandeza tal que
X
X
=
∈
Dem. Faça-se :=
P
∈
∈
≥ 0 ∀ ∈ ; tem-se
X
=
=
X
X
∈
∈
P
∈
P
= P
=1
∈
∈
P
Ponha-se então := ∈ que é da mesma ordem de grandeza que os
pois está compreendido entre o menor e o maior dos elementos de ( )∈ Tem-se
então
X
X
X
X
X
= (
)(
) =
(
) =
∈
∈
∈
Finalmente tem-se
P
∈
P
∈ =
∈
P
X
∈
∈
∈
=
X
∈
∈
o que demonstra o resultado.¤
Corolário 4.3 Seja um conjunto finito de índices, e ( )∈ um conjunto de números
positivos
P lugar as quatro igualdades seguintes:
P ou nulos. Tem
1. P∈ ∅ = ∅ P ∈
2. P∈ $ = $ P∈
3. P∈ @ = @ P∈
4. ∈ ∞ = ∞ ∈ ¤
P
Observe-se que quando situado à direita do símbolo de soma ∈ , o símbolo
∅ representa um , a priori diferente para cada índice . O mesmo acontece para
cada um dos símbolos assimptóticos @ $ e ∞
4.2.3
Algumas aplicações
As noções de ordens de grandeza estendem-se de forma imediata aos vetores de um
espaço vetorial normado:
Definição 4.9 (vetor ) Um vetor é dito se a sua norma for ; definem-se da
mesma forma vetores limitados, apreciáveis e .
4.2
Análise com ordens de grandeza
101
Por aplicação da desigualdade triangular, a proposição 4.6 generaliza-se imediatamente aos e aos dos espaços normados.
Acontece que duas normas standard num espaço normado standard são equivalentes se e só se determinam as mesmas ordens de grandeza. Tem-se:
Proposição 4.7 Para duas normas standard quaisquer kk0 e kk00 sobre um mesmo
espaço standard, são equivalentes as seguintes propriedades:
1) kk0 e kk00 determinam os mesmos vetores: i) ; ii) ; iii) ; iv) .
2) existem dois números reais e ≥ 0 tais que para todo o ∈
kk0 ≤ kk00 ≤ kk0
¤
Outra aplicação interessante das ordens de grandeza faz-se através das chamadas
"lupas". Com efeito, no cálculo com ordens de grandeza não é preciso fixar uma
unidade de grandeza para se fixar uma escala de trabalho. Basta recorrer à noção
de lupa: a escolha de um permite introduzir uma adequada restrição do campo
de investigação e, depois de uma ampliação, uma capacidade de distinção entre o
apreciável, o e o . O estudo através da lupa de objetos da matemática clássica
ajuda a compreender a natureza da informação veiculada por quocientes, como a
derivada ou o diferencial.
Tem-se a
Definição 4.10 (lupa) Num espaço normado, seja 6= 0. Chama-se lupa de
ampliação 1 centrada no ponto 1 à mudança de variável 7→ definida pela
igualdade
= 1 +
definida para os limitados.
É muito interessante a observação de conjuntos à lupa.
A seguir vamos apresentar alguns exemplos clássicos do exame à lupa de gráficos
de funções elementares, = () e e serão então um produto e ter-se-á por
isso = ( ) e = ( ). As lupas serão centradas num ponto 1 = (1 (1 ))
do gráfico. A imagem do gráfico de através da lupa é o gráfico de uma função
= ( ). Diz-se também que = 1 é a imagem de através desta lupa; ela
é caracterizada pela relação = () se e só se = ( ) , que dá imediatamente
1
( ) := 1 ( ) := [(1 + ) − (1 )]
Nos exemplos clássicos seguintes serão considerados apenas conjuntos limitados, e limitar-nos-emos apenas aos casos em que = ∈ R ou = ( ) ∈ R2 e os
com valor real.
102
Métodos da Análise Não-Standard
Exemplo 4.8 () = 2 . Suponhamos 1 limitado. Obtém-se
() = 21 + 2 ≈ 21
Para limitado, a imagem através da lupa de é uma função -próxima da
função linear 7→ 21 ∈ 1 (R R)
Exemplo 4.9 () = . Seja 1 ∈ R arbitrário. Obtém-se
1
1
() = [(1 + ) − (1 )] = [(cos 1 + ∅] ≈ 1
com 1 = 1 ; Igualmente, para limitado, () é -próxima duma função
linear.
Exemplo 4.10 () = 2 1. Se 6= 0 tem-se
¸
∙
1
1
1
1
21
+ 21
−
− 21
() =
1 +
1
1 +
1
Se for 1 ≈ 0 limitado, obtém-se () ≈ (21 1 − 1 ) com 1 := 11 ∈ [−1 1]
e 1 := cos 11 ∈ [−1 1]
Se 1 ≈ 0 para limitado, tem-se
¸
∙
21
1
1
() =
−
1 +
1
Para explicitar o comportamento de , convém distinguir os casos, conforme a
ordem de grandeza de 21
Se 21 for (em particular se 1 = 0), como o seno é limitado, tem-se simplesmente ≈ 0 (em particular é diferenciável em zero, de derivada nula).
Se 21 := for tem-se 1 = 1 que é visto que 1 ≈ 0 e é , pelo que
´
1
1 ³
1
1
1
1
=
=
+
− (1 + ∅)
1 − (1 + ∅) =
1
1 +
1 1 +
1
1
donde
µ
¶
µ
¶
1
1
1
1
=
− (1 + ∅) = − (1 + ∅) cos
+∅
1 +
1
1
1
e finalmente
¸
∙
∙
¸
21
1
1
1
21
=−
−
cos
+∅ =
() =
1 +
1
1
= (1 + ∅) ≈ 1
4.3
Fundamentos da Análise Não-Standard
103
Aqui também é -próximo de uma função linear; contudo esta função linear, caracterizada pelo valor de 1 := 11 muda muito rapidamente quando se varia
infinitamente pouco o centro (1 (1 )) da lupa.
Se 21 := é apreciável, ponha-se := 11 e := 11 ; tem-se
´
h ³
i
() = cos − 1 −
2
sendo esta última expressão não linear. Com 1 fixo, a amplitude medida por = 1
cresce com a ampliação 1 enquanto que a frequência medida por 1 diminui, o que
é de fato natural. Como se viu no caso precedente, é o alargamento das oscilações
2
mais importante em relação à ampliação das amplitudes quando 1 for finalmente
.
Exemplo 4.11 ( ) = 2 + 2 . Suponhamos (1 1 ) limitado. Tem-se naturalmente
( ) = 21 + 1 2 + 31 2 + 31 2 + 2 3 ≈ 21 + 31
Exemplo 4.12 ( ) = √
2
+ 2
Se ( ) 6= (0 0) e (0 0) = 0
Exemplo 4.13 No caso em que (1 1 ) = (0 0) encontramos
( ) = √
2 + 2
isto é = . O Gráfico de é invariante em relação a toda a lupa centrada na
origem (a função é homogénea de grau 1 como as funções lineares). Por não ser
quase linear através da lupa, esta função não é diferenciável em (0 0).
4.3
4.3.1
Fundamentos da Análise Não-Standard
Duas vias para a ANS – a construtiva e a axiomática
Em 1960 Abraham Robinson [61] mostrou, que se podem construir extensões próprias
∗
R de R que contêm números e . A teoria, inicialmente envolvendo ultrafiltros
livres e classes de equivalência de números reais, desenvolvida por Robinson [61],[62],
foi mais tarde axiomatizada por E. Nelson [57] como uma extensão conservativa da
axiomática de Zermelo Fraenkel (ZF), para a mais vulgar teoria dos conjuntos.
Nesta subsecção não pretendemos fazer uma descrição exaustiva da teoria de
Robinson, mas apenas delinear as suas ideias principais com vista a relevar a intuitividade que está na sua origem, bem como a dos objetos em causa (números,
conjuntos, funções,..., – hiperreais) e os métodos usados na sua construção.
Recordemos portanto, de forma breve, a construção de Robinson via ultraprodutos: tida como menos direta que a abordagem axiomática (que na realidade compactou em axiomas adicionais todas as propriedades novas essenciais da construção
104
Métodos da Análise Não-Standard
de Robinson), leva a um contacto mais intuitivo com as origens da nova estrutura.
Com efeito, os números hiperreais (entre os quais os e os ) são construídos como classes de equivalência de sucessões de números reais, de forma bastante
semelhante à construção de R a partir do conjunto dos números racionais, usando
sucessões de Cauchy. Na realidade, o “carácter ideal” ou “não-standard” dos novos
números já está presente em certos números reais.
Seja N o conjunto dos números naturais. Um ultrafiltro livre U sobre N é definido
da seguinte maneira:
Definição 4.11 (ultrafiltro livre) U é um conjunto não vazio de subconjuntos de
N(P(N) ⊃ U ⊃ ∅) tal que:
(1) ∅ ∈
U
(2) ∈ U ∧ ∈ U ⇒ ∩ ∈ U
(3) ∈ U ∧ ∈ P(N) ∧ ⊃ ⇒ ∈ U
(4) ∈ P(N) ⇒ ou ∈ U ou { ∈ N : 6= } ∈ U mas não ambos os casos
(maximalidade)
(5) ∈ P(N) e finito ⇒ ∈
U
Sendo e duas sucessões = { } e = { } o conjunto ∗ R é definido como o
conjunto das classes de equivalência de todas as sucessões de números reais modulo
a seguinte relação de equivalência:
≡ ⇔ { : = } ∈ U.
Similarmente, diz-se que uma relação está estabelecida entre elementos de ∗ R
se for verdadeira, termo a termo, para o conjunto de índices que pertencem ao
ultrafiltro. Por exemplo,
⇔ { : } ∈ U.
R é isomorfo a um subconjunto de ∗ R, visto que se pode identificar qualquer
número real ∈ R com a classe de equivalência ( ). É o axioma da
maximalidade (4) que assegura que ∗ R é um corpo ordenado. Em particular, graças
a esse axioma, uma sucessão que toma valores num conjunto finito de números é
equivalente a um desses números, dependendo do ultrafiltro U. Isso traz o problema
dos divisores de zero: com efeito, o fato de ser (0 1 0 1 0 ) · (1 0 1 0 1 ) =
(0 0 0 0 ) não implica que hajam divisores nulos, visto que o axioma (4) assegura
que uma das sucessões é igual a zero e a outra igual a um.
Torna-se evidente que ∗ R contém novos elementos em relação a R quando se
considera a sucessão { = } = {1 2 3 }.
Exemplo 4.14 A classe de equivalência desta sucessão, , é maior que qualquer
número (classe) real. Com efeito, para qualquer ∈ R { : } ∈ U para
qualquer que seja ∈ R É claro que o inverso de é um infinitesimal.
4.3
Fundamentos da Análise Não-Standard
105
Então o conjunto dos números hiperreais ∗ R é totalmente ordenado e é um corpo
Não-Arquimediano, do qual o conjunto R dos números reais standard é um subcorpo.
∗
R contém elementos infinitos, isto é, números tais que ∀ ∈ N || . Também
contém números infinitesimais, isto é, números tais que ∀ 6= 0 ∈ N || 1
Um elemento finito é definido assim: ∃ ∈ N ||
Todos os números hiperreais podem ser adicionados e subtraídos, multiplicados
e divididos.
∗
São definidos subconjuntos como hiperinteiros N (do qual N, o conjunto dos
hiperinteiros finitos ∗ N∞ é um subconjunto), hiperracionais ∗ Q, números positivos e
negativos, números hiperinteiros pares e ímpares, etc.... De forma geral a maior parte
dos métodos standard e definições podem ser aplicados da mesma maneira como para
o conjunto standard R. Os diferentes conjuntos e propriedades são classificados como
internos ou externos.
Tal como na secção anterior, um resultado importante é o seguinte:
Proposição 4.8 Todo o número finito pode ser separado de forma única, como a
soma de um standard ∈ R e de um número , tal que = +
Por outras palavras, o conjunto dos hiperreais finitos contém os reais ordinários
mais um número {} infinitamente próximo à volta de um real standard ordinário
. O conjunto desses números adicionais {} é dito o halo ou a mónada de .
Mais geralmente, pode-se demostrar que qualquer número hiperreal pode ser
decomposto de uma forma única como = + + onde ∈∗ N , ∈ R ∩ [0 1[
e
Esta abordagem tem, em relação à abordagem axiomática, a vantagem de ajudar
a desenvolver a intuição dos números hiperreais, como objetos construtíveis, pelo que
considerámos concetualmente mais vantajoso revê-la, ainda que sumariamente, antes
de partirmos para o “ato de fé”, que é a axiomatização. A sua grande desvantagem
é que, para essa revisão, é necessário proceder à demonstração de um punhado de
teoremas, o mais importante dos quais é o princípio de transferência, que requer
um pesado aparato lógico, através da semântica tarskiana para as linguagens da
primeira ordem.
Nesta publicação optamos por adotar a linguagem duma teoria axiomática nãostandard dos números reais, por ser moderna, imediata, para além de dispensar o
aparato lógico referido – o que parece mais adequado aos objetos geométricos. A
teoria I.S.T é o objeto das próximas subsecções.
4.3.2
A teoria dos conjuntos internos (I.S.T)
Coloquemo-nos no quadro da teoria Zermelo-Fraenkeliana de conjuntos, mais o axioma de escolha (ZFC) e consideremos o termo standard ((·)) como primitivo a
ser adicionado à linguagem subjacente. Nesta secção apresentamos os axiomas que
governam o uso desse predicado (na Análise e na Geometria), no quadro dessa linguagem enriquecida, seguindo Franco de Oliveira [35] van den Berg [70] e Diener
[22].
106
Métodos da Análise Não-Standard
O predicado novo (ou externo) () permite definir muitos outros predicados,
como , , , , sendo todos predicados externos.
Definição 4.12 (condição interna, externa) Uma condição é interna se, para
a sua formulação, não se recorre, de maneira essencial, a nenhum predicado nãostandard; no caso contrário, é externa.
Exemplo 4.15 A condição “para todos os números reais 0 e 0, existe
algum natural tal que ≥ ” (axioma de Arquimedes) é uma condição interna,
e a condição “existem números reais 0 e 0 tal que para todos os naturais
standard , ” é uma condição externa.
Proposição 4.9 Uma condição interna é standard se todas suas constantes e todos
seus parâmetros são standard.¤
1
1
Exemplo 4.16 Para 0, , as condições () ≡ [|| 10
⇒ 2 100
],
2
2
2
() ≡ [0 ⇒ 0 ] e () ≡ [0 ⇒ é ] são
respetivamente standard, interna mas não-standard, e externa.
Nota 4.4 Observe-se que só condições internas podem ser standard ou não. Uma
condição interna sem qualquer constante ou parâmetro é necessariamente standard.
Dada uma condição () na variável (a única variável livre em ), e um
conjunto C, consideremos a classe de todos os objetos de C que satisfazem a
proposição (), isto é,
P = { ∈ C : ()}
O axioma de separação da teoria (usual) de conjuntos assegura a existência de
P. Todos os teoremas clássicos são aplicáveis.
No caso em que () é uma proposição externa, o axioma de separação, já não
se pode aplicar. Para se poder continuar a considerar a coleção P ⊂ C de todo o
de C que satisfaz (), tem-se que aceitar que alguns teoremas clássicos já não
se apliquem a P; neste caso, diz-se que uma tal coleção é um conjunto externo;
estritamente falando, os conjuntos externos não são conjuntos.
Exemplo 4.17 O halo de 0 definido por:
(0) = { ∈ R : é }
é um conjunto externo. Com efeito, qualquer número real standard 0 é maior
que qualquer ∈ (0). E ainda: (0) não tem supremo (embora seja limitado).
Com efeito, seja um tal supremo, e seja 0 . Se fosse seria + o
que é impossível porque é o supremo de (0). Nem pode ser apreciável porque
− também seria apreciável, o que significaria que não era o supremo.
4.3
Fundamentos da Análise Não-Standard
107
Definição 4.13 (conjunto externo) Chama-se conjunto externo a qualquer coleção
do tipo
P = { ∈ C : ()}
onde C é um conjunto interno e uma proposição externa, cujos elementos não
constituem um conjunto.
Nota 4.5 Normalmente o carácter estritamente externo de um conjunto pode ser
mostrado observando que, pelo menos, um resultado standard é falso para os elementos desse conjunto.
Exemplo 4.18 O halo de 0 é externo porque o resultado standard segundo o qual
qualquer subconjunto não vazio e majorado de R tem supremo, não é verdadeiro em
(0).
Exemplo 4.19 O fato de ser uma proposição externa não significa que P o
seja necessariamente, caso contrário o conjunto dos naturais (isto é, {0}) seria
externo.
Nota 4.6 Na prática, mostra-se que uma classe U é um conjunto externo, mostrando
que é possível construir, a partir de U e usando operações internas (excetuando-se o
complemento absoluto4 ou a pré-imagem por uma função), o halo de zero ou de algum outro conjunto conhecido. Com efeito, qualquer conjunto que possibilita, por
operações clássicas (internas), definir algum conjunto externo, tem de ser externo,
caso contrário a teoria dos conjuntos internos seria contraditória.
Têm-se os seguintes exemplos paradigmáticos:
Exemplo 4.20 O conjunto de números reais infinitamente grandes (∞) definido
por
(∞) = { ∈ R : }
é externo porque, se fosse interno, (0) também seria, como (0) = {0} ∪
((∞)), com () = 1.
Exemplo 4.21 A galáxia principal
G = { ∈ R : }
é externo visto que (∞) = R − G, como também é o conjunto dos números reais
apreciáveis
A = { ∈ R : ́}
visto que então G é a envolvente convexa de A.
4
Isto é, relativamente ao universo.
108
Métodos da Análise Não-Standard
Exemplo 4.22 O conjunto N de todos os naturais standard, e o conjunto R de
todos os números reais standard, são externos, porque G também é a envolvente
convexa de ambos.
De fato têm-se as seguintes uniões disjuntas:
R = G t (∞)
e
G = (0) t A.
Abaixo seguem-se alguns exemplos de conjuntos externos muito úteis na Análise
Não-Standard assimptótica, e que são definidos usando um 0 e são chamados a −galáxia, o −halo, o − microhalo, a −microgalaxia e a −megagalaxia
respetivamente.
Exemplo 4.23 − (0) = { ∈ R : () limitado}
− (0) = { ∈ R : () }
− (0) = { ∈ R : ≤ para todo o standard}
1
− (0) = { ∈ R : existe um 0 limitado tal que || − };
− (0) = { ∈ R : existe limitado tal que || 1 }.
Até à estão todos contidos no halo de 0 e formam, nessa ordem, uma
sucessão decrescente sob a inclusão.
Nota 4.7 Como uma função : → , do ponto de vista da teria de conjuntos,
não é nada mais que o seu gráfico ( ) ⊂ × , existem funções internas, que são
funções cujo gráfico é um conjunto interno, e funções externas, no caso contrário.
Vejamos o
Exemplo 4.24 (função característica dos números standard) A função característica dos números standard em R que é a função definida por () = 1 se e
só se () e () = 0 no caso contrário, é externo, .
Para se usar o predicado standard e todos seus derivados corretamente, precisamos de alguns axiomas que são adicionados aos habituais do ZFC, obtendo-se
assim a teoria Nelsoniana ZFNC.
As regras para manipular o predicado “standard”, aparecem sob a forma de três
axiomas-esquemas: transferência, idealização e standardização.
Na ANS são usuais as seguintes simplificações de notação, usadas para exprimir
os axiomas:
∀ para significar [∀(() ⇒ )]
e
∃ para significar [∃(() ∧ )]
4.3
Fundamentos da Análise Não-Standard
109
Axioma 4.2 (Transferência) Para qualquer fórmula standard (), tem-se
∀ () ⇔ ∀ ()
Uma consequência imediata é a
Proposição 4.10 Se () é uma proposição standard, () é verdadeira para todo
o , se e só se () é verdadeira para todo o standard.¤
Usando a negação () := ¬ () de (), é fácil ver que uma versão equivalente
do princípio de transferência é
Proposição 4.11 Para qualquer fórmula standard (), existe um que satisfaz
() se e só se existe um standard que satisfaz ().¤
O caso em que a propriedade () é satisfeita por um único 0 é interessante
pois assegura que este 0 é necessariamente standard. Assim, qualquer objeto que
pode ser caracterizado de forma única, é standard.
Exemplo 4.25 ∅, 0, 1, 2, , , sin(), log(), + , ≤ , [0 ]R , ∞ [0 1],... são
standard.
Uma consequência importante do axioma de transferência é a
Proposição 4.12 Toda a função standard tem valores standard em pontos standard.¤
Outra consequência útil é a seguinte:
Proposição 4.13 Para 1 2 , todos standard, o conjunto
:= 1 × 2 × ×
é standard, e = (1 2 ) ∈ é standard se e só se todas suas coordenadas
são standard.¤
Axioma 4.3 (Idealização) Para qualquer condição ou relação interna ( ),
tem-se
[∀ ( ⇒ ∃∀ ∈
( ))] ⇐⇒ [∃∀ ( )]
Têm-se as consequências imediatas:
Proposição 4.14 Existe um conjunto finito que contém todos os objetos standard.¤
Corolário 4.4 Todos os conjuntos infinitos têm elementos não-standard.¤
Consideremos agora uma relação binária (interna) (⇔ ( )) que se pode
ler “ domina ”. Tem-se a
110
Métodos da Análise Não-Standard
Definição 4.14 (relação concorrente) ( ) é concorrente se para todo o conjunto finito standard , existe um tal que , para qualquer elemento ∈
Exemplo 4.26 A relação ( ) ≡ ( ∈ N) ∧ ( ∈ N) ⇒ ( ≥ ) é concorrente em
N. Conduz à existência de naturais infinitamente grandes.
O axioma de idealização assegura que,
Proposição 4.15 Para toda a relação interna concorrente ( ), existe um que
domina todo o standard, e reciprocamente.¤
Vejamos alguns exemplos de relações internas concorrentes e as consequências
das idealizações correspondentes:
Exemplo 4.27 A relação ( ) ≡ ( ∈ ) ∧ ( 6= ) conduz ao fato de que
qualquer conjunto é standard e finito se e só se tem apenas elementos standard.
Uma consequência é que qualquer natural limitado (isto é, menor que algum natural
standard) é também standard.
Exemplo 4.28 A relação (P ) ≡ (P)∧( ∈ P) conduz à existência de um
conjunto finito que contém qualquer conjunto standard como elemento, um resultado
que já se tinha mencionado.
Axioma 4.4 (Standardização) Para qualquer fórmula (), interna ou externa,
tem-se:
∀ C ∃ S ∀ [ ∈ S ⇔ ∈ C ∧ ()]
Observe-se que
(i) O axioma de transferência só pode ser aplicado a fórmulas standard,
(ii) O axioma de idealização só pode ser aplicado a fórmulas internas,
mas que
(iii) O axioma de standardização aplica-se a qualquer fórmula, interna ou não.
Seja () uma proposição; já se mostrou que, se não é interna, o conjunto
de todo o que satisfaz () tem uma boa chance de não ser um conjunto da
matemática standard. Seja S um conjunto standard tal que um objeto standard
arbitrário é elemento de S se e só se é elemento de C e satisfaz (). O princípio
de standardização assegura que
Proposição 4.16 Para todo o conjunto standard existe um subconjunto standard
S ¤
É fácil ver que, nesse caso
Proposição 4.17 O conjunto S é único.
Dem. Com efeito, o princípio de transferência implica que qualquer conjunto
standard é caracterizado pelos seus elementos standard.¤
4.3
Fundamentos da Análise Não-Standard
111
Definição 4.15 (standardização) Chama-se ao processo implicado nas proposições
4.17 e 4.16 a standardização do conjunto (interno ou externo) de todos os em C
tal que () e é denotado por
S := { ∈ C : ()}
É importante observar que
(i) se é não-standard, é possível que pertença a S e, não obstante, que
não satisfaça ();
(ii) é possível que não pertença a S e contudo verifique ().
Os exemplos seguintes são elucidativos:
Exemplo 4.29 Se () é a proposição 0 ½ ½ 1 para qual S =]0 1], qualquer
0 pertence a S embora () seja falso, e qualquer número 1+ , com 0
não pertence a S embora (1 + ) seja verdadeira.
Proposição 4.18 Em R qualquer número limitado está infinitamente próximo
de algum número standard.
Dem. Tem-se que: através da standardização, pode-se considerar o (único) subconjunto standard S+ de R, cujos elementos standard são exatamente os elementos
tais que ≥ (aqui () ≡ ≥ ). Como é limitado, S+ é não vazio (existe um
standard ≥ || por ser por suposição limitado); analogamente, S− := R − S+ é
não vazio (tome-se −). Aplicando a transferência, com vista a considerar apenas os
elementos standard de S+ que são os únicos “bem conhecidos”, vê-se que (S− S+ ) é
um corte standard de R; este corte caracteriza um número real , standard, através
de transferência. É então claro que que tem que estar -próximo de .¤
Para todo o subconjunto standard, A, de um espaço topológico standard E,
o fecho A de A em E é o único conjunto standard cujos elementos standard são
exatamente todos os 0 ∈ E tais que o halo de 0 intersecta A. Para um A geral,
possivelmente externo, a mesma definição conduz à noção de sombra:
Definição 4.16 (sombra de um conjunto) A sombra de A, notada por ◦ A, é o
único conjunto standard cujos elementos standard são exatamente aqueles cujo halo
intersecta A:
◦
A := {0 ∈ E : (0 ) ∩ A 6= ∅}
Exemplo 4.30 Sendo A standard, ◦ A = A. Se A é interno, mostra-se que ◦ A é
fechado. Mas isso não é necessariamente verdade para um conjunto externo.
Exemplo 4.31 Para qualquer 0 , a sombra do conjunto interno A = { :
≤ 1 + } é o intervalo fechado [0 1]; mas a sombra do conjunto externo
A = { : 0 ½ / 1} é o intervalo semi-aberto ]0 1].
Observe-se que a noção de sombra de um subconjunto é obtida estendendo a
conjuntos, outros que não os standard, uma propriedade que corresponde ao fecho,
no caso de um conjunto standard: assim a sombra é também chamada o “-fecho”.
112
Métodos da Análise Não-Standard
Definição 4.17 (sombra interior) Seja A qualquer subconjunto de um espaço
topológico standard E. A sombra interior de A, notada A, é o único subconjunto
standard de E cujos elementos standard são exatamente aqueles cujo halo está contido em A :
A := {0 ∈ E : (0 ) ⊂ A}
Se A é um conjunto standard, A é o interior de A: por isso pode-se interpretar
a sombra interior como uma noção de -interior. Se A é interno, A é sempre um
subconjunto aberto de E.
Exemplo 4.32 A sombra interior do conjunto interno A = { : ≤ 1 + } é
o intervalo aberto ]0 1[; mas a sombra interior do conjunto externo A = { : 0 ½
/ 1} é o intervalo semi-aberto ]0 1].
Vimos que para qualquer aplicação : → entre espaços métricos standard
( ) e ( ), se e 0 ∈ são standard, é contínua em 0 se e só se
≈ 0 ⇒ () ≈ (0 )
Tem-se a -noção correspondente:
Definição 4.18 (função S-continua) Sejam e dois espaços métricos standard. Uma função (interna) : → é dita -contínua em 0 se e só se para
todo o ≈ 0 , for () ≈ (0 )
Exemplo 4.33 Seja 0 algum número . A função real () é contínua
mas não é -contínua em 0. A função () (onde () é o maior natural
menor que ) é -contínua em qualquer ponto, mas é descontínua em qualquer ponto
de Z.
Pode-se mostrar que
Proposição 4.19 é -contínua em 0 se e só se satisfaz a fórmula habitual
∀ ∈ D( ) ( ( 0 ) ⇒ (() (0 )) )
com e standard.¤
Nota 4.8 A -topologia “engrossa” tudo. Se não se olhar uma função -contínua
“de muito de perto”, então parece ser contínua. É por isso que a -continuidade
às vezes é chamada “continuidade para míopes” [22].
Definição 4.19 (elemento próximo-standard) Para qualquer subconjunto de
um espaço métrico standard , um ponto ∈ é dito próximo-standard em se
existe um ponto standard 0 ∈ tal que ≈ 0 .
4.3
Fundamentos da Análise Não-Standard
113
A expressão “ é próximo-standard”, significará “ é próximo-standard em =
”.
Há dois objetos matemáticos usualmente considerados como a sombra de uma
função :
(i) A sombra do gráfico G( ) de ;
(ii) O único conjunto standard cujos elementos standard são (0 (0 )) para
todo o 0 standard tal que (0 ) é próximo-standard.
No caso (i), o exemplo da função (), vista na secção anterior, mostra
que esta sombra nem sempre é o gráfico de uma função: na abscissa = 0, a sombra
considerada contém todos os pontos com ordenada ∈ [−2 +2].
No caso (ii) o conjunto considerado é sempre o gráfico de alguma função standard,
e tem-se a
Definição 4.20 (standardização de uma função) O conjunto referido em (ii)
é chamado a standardização de e notado por .
Exemplo 4.34 Para a função () = (), () = −2 para 0,
(0) = 0 e () = 2 para 0.
pode ser muito irregular, como mostra o exemplo seguinte
Exemplo 4.35 Se () = () com , então para alguma escolha de ,
pode ser não mensurável.
Nota 4.9 Há situações em que ambas as noções coincidem. É o que acontece quando
é -contínua em “pontos todos razoáveis”. Corresponde ao caso em que a sombra
do gráfico de é o gráfico de uma função contínua standard 0 , chamada a sombra
da função .
Abaixo exibem-se dois exemplos em que, o domínio da sombra é menor que o
domínio da função (1 exemplo), e vice-versa (2 exemplo).
Exemplo 4.36 () = 1(2 + ) (com 0 ), no caso 0 () = 12 .
Exemplo 4.37 () = ((1+)) que é definida em ]−2(1+) +2(1+
), enquanto que a sua sombra 0 () = () é definida em ] − 2 +2[
Para qualquer função note-se o seu domínio por D(), seu contradomínio por
D0 ( ), e seu gráfico por G( ). Será sempre suposto que D() e D0 ( ) são subespaços
de espaços métricos standard.
Com as novas noções pode-se considerar a noção de uma função que é -contínua,
não apenas num determinado ponto, mas em todo o seu domínio.
Definição 4.21 (função S-contínua num espaço métrico) Sejam e espaços
métricos standard, e uma função interna, tal que D() ⊂ e D0 ( ) ⊂ . A
função é dita -contínua em × se e só se é - contínua em cada ponto
∈ D() tal que ( ()) é próximo-standard em × .
114
Métodos da Análise Não-Standard
Exemplo 4.38 A função (), ∈ R, não é -contínua (em R), mas a
função 1(2 + ) ∈ R, é -contínua (em R).
Exemplo 4.39 A restrição de () a qualquer subconjunto de R que não
contém 0 é -contínua em R\{0} × R
Pode-se ver que se é uma função standard, é contínua se e só se é -contínua
em D( ) × D0 () .
Observe-se que não seria razoável esperar a -continuidade de em todos os
pontos de D(). Nesse caso, a função () = 2 não seria -contínua.
A sombra em × do gráfico da função -contínua , é o gráfico de uma função
continua (standard) 0 , chamado a sombra de , e notado por ◦ . Mais exatamente,
tem-se o
Teorema 4.1 (da sombra contínua) Sejam e espaços métricos standard ,
e é uma função definida em D() ⊂ e com valores em . A função é contínua em × se e só se existe uma função contínua standard 0 , com domínio
D(0 ) em com as duas propriedades seguintes:
(i) Para qualquer ( ()) próximo-standard em × , está em D( );
(ii) Para qualquer 0 standard, 0 ∈ D(0 ) e qualquer ∈ D( ), se ≈ 0 então
() ≈ 0 (0 ).¤
Recorde-se que, para uma função definida num subconjunto aberto D() de
um espaço normado standard e com valores num espaço normado standard ,
se é standard, é estritamente diferenciável no ponto standard 0 se existe uma
função linear contínua standard : → tal que para qualquer ∈ limitado,
qualquer 6= 0 , e qualquer ≈ 0 , (( + ) − ()) ≈ [] tem lugar.
Tem-se a -propriedade correspondente.
Definição 4.22 (função S-diferenciável num ponto) Sejam e dois espaços
normados standard. Uma função com domínio e contradomínio em e respetivamente é dita -diferenciável no ponto standard 0 com diferencial , se é definida
a qualquer ponto ≈ 0 , se : → é uma função linear contínua standard, e
para todo o limitado, todo 6= 0 , e todo o ≈ 0 , tem-se
1
( ( + ) − ()) ≈ []
Definição 4.23 (função S-diferenciável) Seja uma função definida num subconjunto aberto standard D( ) de um espaço normado standard com valores num
espaço normado standard . A função é dita -diferenciável se for -diferenciável
em todo o 0 standard do seu domínio para qual o seu valor (0 ) é próximo-standard
em .
Tem-se o importante teorema que afirma que, de um modo análogo para funções
-contínuas que são as que têm uma sombra contínua, as funções -diferenciáveis
são as que têm uma sombra de diferenciável.
4.3
Fundamentos da Análise Não-Standard
115
Teorema 4.2 (da sombra diferenciável) Sejam e dois espaços normados
standard, e seja uma função interna definida e -diferenciável num subconjunto
aberto standard D ( ) ⊂ , com valores em A sombra de existe, e está
definida num subconjunto aberto standard D ( ) e é 1 . Além disso, para qualquer
0 ∈ D standard ( ), o diferencial D ( ) (0 ) é o -diferencial de no ponto
0 .¤
Os princípios de permanência são resultados, específicos de conjuntos externos,
de modo a que estes se tornem mais manipuláveis.
Muitas vezes é possível extender o alcance de uma propriedade, simplesmente
tirando proveito da diferença interno versus externo, sem qualquer outro argumento.
Essa forma de raciocínio é uma das técnicas particulares da análise não-standard,
com a denominação de princípio de Cauchy.
Exemplo 4.40 Seja ( )≥0 uma sucessão standard de números reais positivos, e
seja 0 um infinitesimal qualquer. Sendo limitado, a sucessão = é
decrescente (desde −1 = ( −1 ) ≈ 0). O conjunto (interno) D de todos
os índices a partir dos quais a sucessão ( )≥0 é decrescente e por isso contém o
conjunto (externo) N de todos os naturais standard. É claro que não pode ser D =N,
porque D é interno (a propriedade “ser decrescente até “) e N é externo. Assim,
existe um tal que ( ) é decrescente para todo o ≤ . E isto sem qualquer
suposição adicional sobre a sucessão ( ).
Tem-se a
Proposição 4.20 (Princípio de Cauchy) Nenhum conjunto externo é interno.¤
Antes de chegar ao princípio de Fehrele, é necessário recordar o
Lema 4.1 (Robinson) Se ( )≥0 é uma sucessão tal que ≈ 0 para todo o
standard, existe um tal que ≈ 0 para todo o ≈ .¤
Exemplo 4.41 Para mostrar que o limite uniforme de uma sucessão ( )≥0 de
funções contínuas é também contínuo, poder-se-ia querer proceder do seguinte modo:
primeiro assumir, através de transferência, que a sucessão ( )≥0 bem como o
seu limite são standard. Mas, para mostrar que a função standard é contínua
precisa-se ter () ≈ () a partir de ≈ , recorrendo a algo como,
() ≈() () ≈() () ≈() ()
(∗)
Infelizmente as quase-igualdades (da convergência uniforme) () e (), só têm lugar
para , quando (), a priori, só é verdadeira para standard (visto que o critério
não-standard para a continuidade só é verdadeira para funções standard). Assim,
fazendo := () − (), pode-se escolher um tal que a proposição (∗) seja
verdadeira, e consequentemente, concluir o que se deseja.
116
Métodos da Análise Não-Standard
Para o que se segue, são necessárias as noções de halo e galáxia.
Definição 4.24 (prehalo) Seja ⊂ ; é um prehalo se existe uma família
interna ( )∈ , standard, de subconjuntos (internos) de tal que
\
=
()
Definição 4.25 (pregaláxia) Seja ⊂ ; é uma pregaláxia se existe uma
família interna ( )∈ , standard, de subconjuntos (internos) de tal que
[
=
()
Exemplo 4.42 Um halo é um prehalo externo. Uma galáxia é uma pregaláxia externa.
Exemplo 4.43 (), (∞) são halos: tome-se = N, := [ − 1 + 1 ] para
o primeiro e ∞ =] − ∞ −[∪] +∞[ para o segundo.
Exemplo 4.44 G, A são galáxias: tome-se = N,
= [− ] para o primeiro
1
1
e =] − − [∪] [ para o segundo.
Proposição 4.21 Seja : → R uma função interna.
Se = { : () é } é um conjunto externo, então é um halo.
Se = { : () é limitado} é um conjunto externo, então é uma galáxia.
Seja um espaço métrico conexo. Se (resp. ) é contínua ou -contínua, e
toma valores apreciáveis e (resp. ) então (resp. ) é externo.
Proposição 4.22 (princípio de Fehrele) Um halo não é uma galáxia.
Para o exemplo do lema de Robinson acima, = G é uma galáxia, e é a priori
apenas um prehalo: poderia ser para todo o , e nesse caso = N claro que
seria um conjunto interno. Se é interno, o lema de Robinson é uma consequência
do princípio de Cauchy. Se é um conjunto externo, o lema segue-se do princípio
de Fehrele.
É claro que o complemento de um halo em qualquer conjunto interno é uma
galáxia e reciprocamente; a intersecção ou a união de um halo com um prehalo é
um prehalo e a intersecção ou a união de uma galáxia com uma pregaláxia é uma
pregaláxia.
Observe-se, porém, que existem conjuntos externos que não são nem halos nem
galáxias, como { ∈ R : 0 / ½ 1}. Não obstante, se ( ) é um corte de R, isto
é, R = t , , 6= ∅ com para todo o ∈ e todo o ∈ , então um
dos dois é um prehalo e o outro uma pregaláxia. Se o corte é interno, caracteriza
um número real; se é externo, caracteriza um “número” externo.
4.4
Conclusões
117
Dem. (do princípio de Fehrele) Esta demonstração consiste em estabelecer um
princípio de separação, isto é, se ⊂ com uma galáxia e um halo, existe
um conjunto interno tal que ⊂ ⊂ . A conclusão segue-se então do princípio
de Cauchy.
Para qualquer conjunto , seja o subconjunto de todos os elementos standard
de ; para standard, é externo assim que seja infinito. SejamS e
standard,
T e seja ( )∈ e ( )∈ duas famílias internas tal que = ∈
e = ∈ . Seja o conjunto interno de todos os ( ) ∈ × tal que
⊂ . A hipótese ⊂ implica que × ⊂ o que, por sua vez, implica
que a relação ( ) em P( × ) × ( × ) definida pela condição seguinte,
é um produto Cartesiano, ⊂ , e ∈
× 0 ⊂ tal que × ⊂
é concorrente. Do princípio de idealização,
existe = 0T
S
0
0
× . Basta então considerar = ∈ 0 (ou = ∈ 0 )¤
O lema de Robinson também tem uma demonstração direta elementar, considerando apenas o conjunto interno := { ∈ N : ≤ 1}. Das regras de Leibniz,
é fácil ver que ⊂ ⊂ . Mas a relação ≤ 1 nada tem a ver com o problema
considerado e ≤ 1000 ou ≤ 0001 também serviriam.
4.4
Conclusões
Neste capítulo fizemos uma visita aos conceitos da “verdadeira análise infinitesimal”,
utilizando linguagem e simbologia modernas. Por se tratar de um capítulo de revisão
da literatura, mantivemo-nos num nível geral, aprofundando apenas as questões
pertinentes à investigação a ser desenvolvida.
Este capítulo serve de fundamento, quer em termos de conceitos, quer em termos
de linguagem e simbologia, para a fundação da Geometria Não-Standard que se
temos vista, e que será objeto dos próximos capítulos.
118
Métodos da Análise Não-Standard
CAPÍTULO 5
O conceito de Geometria
Não-Standard
5.1
Introdução
A Geometria Não-Standard (GNS)1 considerada nesta dissertação, tem como objetivo a aplicação dos novos desenvolvimentos na fundamentação da Análise NãoStandard (Robinson e Nelson – últimas décadas do século XX) nos domínios da
Geometria2 .
Pode-se considerar que os fundamentos da GNS foram lançados nos finais do
século XIX, com o desenvolvimento da Geometria Não-Arquimediana, por Veronese,
Hilbert, Poincaré, e outros [ver capítulo I]. Mas, como explica Franco de Oliveira3 ,
“O desenvolvimento desta geometria ficou, em certo sentido, bloqueado, no mesmo
sentido em que ficou bloqueado o desenvolvimento da Análise Não-Arquimediana
baseada em corpos Não-Arquimedianos que estendem propriamente o corpo dos números reais, por dificuldades intrínsecas que só vieram a ser ultrapassadas com a moderna Análise Não-Standard”.
O objetivo deste capítulo é o de definir tentativamente esta (nova) área da Geometria, à luz da nova e fundamentada linguagem da Análise Não-Arquimediana
proporcionada pela ANS, bem como das clássicas geometrias Não-Arquimedianas
de Hilbert e Veronese.
5.2
Definições tentativas
Não é nova a constatação da dificuldade da construção de um enunciado que caracterize univocamente o que foi, o que é, e o que será a Geometria4 . Por isso, seria
1
O termo “Geometria Não-Standard” ainda não existe na literatura especializada nem nas
classificações habituais (AMS) das ciências matemáticas.
2
Ver capítulo 11.
3
Relatório de orientação da presente investigação.
4
Paulo Almeida, em textos (ainda não publicados) de apoio às conferências realizadas na Universidade de Évora, sobre a Geometria não Comutativa dos Números, dá conta dessa dificuldade.
119
120
O conceito de Geometria Não-Standard
vão tentarmos dar aqui uma definição cabal do que se pretende significar com a
expressão Geometria Não-Standard, por “oposição” à Geometria Standard.
Pretendemos tão somente caracterizar modelos não-standard de geometria, que
serão então denominados de geometrias não-standard.
5.2.1
Modelos Standard e Modelos Não-Standard de Geometria
Definição 5.1 (Modelo Standard de Geometria (ZFC)) Coloquemo-nos no quadro
da teoria ZFC de conjuntos e da respetiva linguagem. Um Modelo Standard de Geometria é um modelo de geometria definido sem recurso a qualquer predicado externo
a ZFC.
Isto é, dado um modelo de geometria, ele é standard (em ZFC) se todos os
objetos e todas as relações definidas pelo modelo são formuláveis em ZFC, apenas.
Exemplo 5.1 A Geometria Euclidiana, tal como modelizada por Hilbert, é um Modelo Standard de Geometria.
Definição 5.2 (Modelo Não-Standard de Geometria, GNS) Um Modelo NãoStandard de Geometria é modelo obtido através de uma extensão (conservativa) de
um Modelo Standard de Geometria. Um Modelo Não-Standard de Geometria é dito
uma Geometria Não-Standard.
Por definição, um Modelo Não-Standard de Geometria, e por conseguinte uma
Geometria Não-Standard, é-o sempre relativamente a um modelo de Geometria de
ZFC.
A extensão a que refere a definição 5.2, pode ser feita através de um puro enriquecimento da linguagem ZFC dos modelos standard, predicando certos elementos
da geometria como sendo “elementos não-standard”, num sentido puramente abstrato – à semelhança do que fez Edward Nelson para a ANS.
Apresentemos alguns exemplos:
Exemplo 5.2 Consideremos, na linguagem ZFC, o modelo euclidiano de geometria, tal como formulado por Hilbert, tendo como suporte um espaço (euclidiano)
E. Por ZFC, existem elementos fora de E. Consideremos então um modelo de geometria que para além de incluir o espaço euclidiano E, inclui também elementos
não pertencentes a esse espaço. Seja E 0 o conjunto desses elementos. Pelo axioma da completude de Hilbert (formulado em ZFC), são necessários novos axiomas
para caracterizar este novo modelo de geometria. Consideremos um novo modelo
Em consequência adota uma definição dinâmica, quer do ponto de vista temporal, quer do ponto
de vista da constituição do grupo humano que pratica a Geometria:
«– [...] em cada momento histórico a Geometria tem sido um exercício de pensamento sobre a
conceção particular de espaço em vigor nesse momento histórico;[...]».
5.2
Definições tentativas
121
de geometria, com base no conjunto E = E ∪ E 0 : os novos axiomas servirão para
caracterizar os conjuntos de pontos que incluem pontos de E 0 Denominemos de
"pontos fora" esses pontos. O modelo com base em E é uma extensão conservativa
do modelo inicial. Uma tal geometria é quadridimensional5 . Se postularmos, para
os elementos não-standard de E, propriedades que, intuitivamente, correspondam
ao chamado “tempo”, E é equivalente ao espaço-tempo da Física. Se postularmos
para esses mesmos elementos não-standard, propriedades que, intuitivamente, correspondam ao chamado “espaço”, E é equivalente às geometrias quadridimensionais,
estudadas por Veronese [72], Maning [54], Rossier [63] e outros. No primeiro caso
os elementos não-standard são o “tempo” (e seus derivados) e no segundo caso, os
elementos da quarta dimensão são o “espaço” (e seus derivados).
Exemplo 5.3 Uma Geometria Euclidiana, provida de objetos e relações que recorrem a infinitamente pequenos atuais e infinitamente grandes atuais (Geometria Euclidiana Não-Arquimediana) é um Modelo de Geometria Não-Standard, pois os seus
objetos não podem todos ser caracterizados na linguagem ZFC. Neste caso a linguagem ZFNC permite a caracterização de todos os objetos: os elementos nãostandard são os , e derivados. Trata-se de uma Geometria Não-Standard
Não-Arquimediana.
5.2.2
Exemplos de Geometrias-Não Standard
A seguir apresentamos dois exemplos (equivalentes) de uma Geometria Não-Standard:
a geometria quadridimensional espacial.
1. Geometria quadridimensional de pontos luminosos
Seja E um espaço euclidiano onde cada ponto é uma fonte luminosa (pontual),
. Consideremos o predicado “fora”, a ser adicionado à linguagem da Geometria
Euclidiana que rege E, sujeito aos seguintes axiomas:
– Dado um espaço euclidiano Euclidiano de fontes luminosas (pontos luminosos)
3-dimensional, existem pontos que não pertencem a esse espaço, ditos situados fora
dele; 6
– O conjunto dos pontos fora, está sujeito aos axiomas da Geometria Euclidiana.
Tem lugar a seguinte definição: Seja E o espaço resultante da união do espaço
euclidiano -dimensional E, com os pontos fora de E. Os pontos de E dizem-se do
tipo I; os pontos fora de E, digamos pertencentes a um conjunto E 0 , dizem-se do tipo
II.7
Seja um observador (receptor luminoso), fixo, situado num ponto fora do espaço
5
Num sentido ainda puramente numérico da palavra “dimensão”.
Conceito Veronesiano de fora.
7
Os tipos, I e II, são predicados derivados do predicado fora.
6
122
O conceito de Geometria Não-Standard
euclidiano tridimensional E (figura abaixo).
Fig. 12. Ilustração de uma Geometria Não-Standard de pontos luminosos.
Fonte: Autor.
O observador só “vê” as fontes luminosas (pontos de tipo I) – não “vê” os raios
de luz que não lhe são dirigidos, que vamos supor são retas, seguinte constituídas por
pontos do tipo II, de acordo com a regra: os pontos dos tipos I e II dão origem a tipos
de retas, planos, espaços, etc. – tipo I e tipo II, respetivamente. Vamos considerar
que O é um ponto do tipo II. Têm-se as seguintes características da geometria do
espaço E:
i) Todo o ponto de tipo I incide com o (está ligado ao) observador por uma
reta de tipo II;
ii) Toda a reta de tipo I incide com o (está ligada ao) observador por um feixe
de retas de tipo II, constituindo um plano de tipo II
iii) Todo o plano de tipo I, que não passe pelo observador, incide com este, por
um espaço de tipo II;
iv) Os planos e espaços de tipo II, que ligam o observador às figuras de tipo I,
são feixes de retas (de tipo II, obviamente);
Também são evidentes os seguintes resultados:
– As figuras geométricas existentes em planos de tipo II, só são “visíveis” ao
observador quando são constituídas por figuras de tipo II, principais, isto é, que
passam pelo observador: retas, planos e espaços. Neste caso, uma reta principal é
vista, pelo observador, como um ponto do tipo I, um plano principal como uma reta
de tipo I, um espaço principal, como um plano de tipo I.
– Todas as outras figuras de tipo II são “invisíveis”. Por exemplo, na figura
acima, a reta o segmento e o triângulo 4 não são visíveis;
– Todas as figuras de tipo I são visíveis, diretamente ou pelas suas projeções
(irradiações dos seus pontos). Por exemplo, na figura acima, a reta é visível.
5.2
Definições tentativas
123
Esta geometria é espacial quadridimensional, e equivalente à geometria em dimensão quatro, de Veronese [72].
Verifica os resultados clássicos:
– Dois planos de tipo II, principais, intersectam-se num ponto, de tipo I;
– Dois planos de tipo II, intersectam-se numa reta de tipo II, mas nem esses
planos, nem a sua intersecção, são visíveis – por isso, são muitas vezes considerados
paralelos;
Consideremos standard os pontos do tipo I, bem como as figuras de tipo I, e
não-standard os outros elementos e figuras. E munido dos axiomas euclidianos mais
as regras acima é um modelo de uma Geometria Não-Standard.¤
2. Geometria quadridimensional do "biombo"
Consideremos um biombo de duas abas (bi-biombo8 , figuras abaixo), representando cada aba o espaço R3 , sendo uma aba a imagem da outra por uma rotação
espacial, de eixo na charneira do biombo.
Fig. 13. Ilustração de uma Geometria Não-Standard de R4 .
Fonte: Autor.
Assim, a união de um ponto de R3 com a sua imagem 0 de R3 , é uma linha
que não está em R3 : está fora de R3 . Qualquer ponto do espaço, entre as abas do
biombo, bem como qualquer figura desse espaço, não pertence a R3 : é o caso do
plano e das retas , , (sendo esta reta a intersecção dos planos e ) (figura
acima).
Têm-se os seguintes resultados:
8
Chama-se um -biombo a um biombo com abas e ( − 1) charneiras (intersecções das abas).
124
O conceito de Geometria Não-Standard
– A todo o par de pontos , 0 de R3 , corresponde uma reta , que não está
em R3 ;
←→ ←−→
– A todo o par de retas , 0 0 corresponde um plano, que não está em R3 .
O conjunto formado pelo biombo mais espaço intermédio (ângulo diedro formado pelas abas), é equivalente ao espaço R4 , onde se pode representar uma base
( ):
Fig. 14. Ilustração de uma de R4 .
Fonte: Autor.
Para a representação do cubo em R4 , tem-se
5.2
Definições tentativas
125
Fig. 15. Ilustração de um cubo de R4 .
Fonte: Autor.
Tal como no exemplo anterior, esta geometria é também não-standard, por conter
elementos fora de um espaço euclidiano.¤
Com estes exemplos apercebemo-nos que as geometrias não-standard são mais
correntes que aquilo que poderíamos julgar. Por outro lado mostram o potencial de fertilidade que tem esse campo de investigação. Porém, intencionalmente,
nesta investigação restringimo-nos se ao estudo das geometrias não-standard NãoArquimedianas (GNSA). Até porque, historicamente, tiveram grande importância,
como se viu na Parte I. As geometrias não-standard abstratas não são estudadas
nesta dissertação – serão objeto de estudos futuros (Ver capítulo 11, Discussão e
Conclusões).
5.2.3
Definição clássica de GNSNA (Analítica)
Como se sabe desde Hilbert e como mais adiante vamos ver (III), qualquer corpo
de segmentos é isomorfo a um corpo numérico. Assim uma geometria sintética é
associada a uma geometria analítica correspondente. Ora toda a geometria analítica
é caracterizada por admitir como modelo um corpo numérico, dito o corpo base da
geometria. Assim, tem-se a
Definição 5.3 (Geometria Não-Standard Não-Arquimediana) Uma Geometria Não-Standard Não-Arquimediana (GNSA) é uma geometria cujo corpo base é
um corpo Não-Arquimediano.
Tal como na ANS podem-se utilizar na GNSA os corpos fundados na ANS, bem
como as teorias fundadoras (em particular, IST), como bases da GNSA. Do mesmo
modo como os corpos fundados na ANS ajudaram no progresso da Análise, também
vieram dar o seu contributo ao progresso da Geometria, através da fundamentação
da Geometria Não-Arquimediana:
i) Provendo-a de bases rigorosas (Modelos Não-Standard);
ii) Enquadrando-a devidamente numa teoria de conjuntos, a saber, a teoria IST
(equivalente a ZFNC) de conjuntos;
e com isso ajudando-a na legitimação de certos métodos – como o da exaustão,
por exemplo – bem como na legitimação de certas definições e construções, reconhecidamente mais intuitivas e mais acessíveis a mentes mais precoces (com as
vantagens pedagógicas advenientes). Certamente também ajudará na procura de
novos desenvolvimentos da Geometria, tal como aconteceu na ANS.
A fundamentação da GNSA pode ser feita de várias maneiras:
i) Colocando-se no quadro da teoria ZFNC de conjuntos de Edward Nelson,
e interpretando os axiomas, de Hilbert, por exemplo, tal como são vulgarmente
apresentados, mas re-interpretando os axiomas de continuidade, no quadro da teoria
IST. Tal re-interpretação introduz entes não-standard;
126
O conceito de Geometria Não-Standard
ii) Colocando-se no quadro de Hilbert, substituir o axioma de continuidade de
Dedekind por axiomas de continuidade Não-Arquimedianos (Veronesianos, por exemplo);
iii) Do ponto de vista métrico, que também é desenvolvido neste texto (capítulo
10), aproveitar os axiomas de Birkhoff, e nos teoremas da colocação da régua e da
colocação do transferidor, usando réguas e transferidores não-standard, respetivamente, definir-se, por exemplo, distância infinitesimal e amplitude infinitesimal para
ângulos;
iv) Do ponto de vista Kleiniano, da teoria de grupos, caracterizar a geometria
como a ação de grupos Não-Arquimedianos sobre espaços.
Na próxima subsecção vamos aflorar esta última abordagem e nos próximos
capítulos vamos recorrer às abordagens ii) e iii) 9 .
5.2.4
Definição Kleiniana de GNSNA
A definição do que é uma geometria elementar10 foi fixada por Felix Klein quando
tinha apenas vinte e três anos de idade no conhecido e célebre programa de Erlangen.
Desde essa época se tem a seguinte
Definição 5.4 (Geometria num conjunto abstrato) Uma geometria num espaço (conjunto cujos elementos são chamados pontos) munido de uma estrutura
(dita geométrica), é a ação dum grupo (cujos elementos são chamados simetrias)
sobre .
Recordemos que dado um conjunto e um grupo ( · ) uma ação de sobre
à direita (respetivamente à esquerda) é uma aplicação
: × →
( ) 7→ ·
(respetivamente
: × →
( ) 7→ · )
tal que ∀ 0 ∈ ∀ ∈
· (0 · ) = ( · 0 )
· =
(respetivamente
· (0 · ) = ( · 0 )
· = )
9
10
Doravante GNS significará GNSA.
No sentido de incluir, no máximo, superfícies de curvatura constante.
5.3
Conclusões
127
Trata-se agora de dar uma definição de Geometria Não-Arquimediana, de acordo
com a definição acima. Tem-se:
Definição 5.5 (Geometria Kleiniana Não-Arquimediana) Seja um conjunto
qualquer de pontos e um grupo Não-Arquimediano que age sobre . Ao par ( )
chama-se uma Geometria Não-Arquimediana.
Exemplo 5.4 Considere-se a ação do grupo euclidiano (isometrias) Não-Arquimediano sobre o conjunto dos pontos do plano E. inclui translações e rotações associadas a vetores, possivelmente e ângulos, possivelmente , respetivamente. A
órbita de um ponto será uma linha Não-Arquimediana. Esta geometria é Euclidiana
Não-Arquimediana.
Exemplo 5.5 Do mesmo modo, a rotação de um ponto, associada a ângulos ,
produz ângulos e circunferências Não-Arquimedianas:
– Seja ∈]0 2] ∩ R podendo tomar um valor (R é uma extensão NãoArquimediana de R), e (0 0 ) um ponto dum plano Cartesiano usual. Então a
órbita de através da ação do grupo (ortogonal) Não-Arquimediano das rotações, é
¸¾
½∙ ¸ ∙ ¸ ∙
¸∙
cos − sin
0
:
=
=
sin cos
0
uma circunferência Não-Arquimediana.
Exemplo 5.6 Uma simetria em relação a um eixo ou a um ponto, infinitamente
próximos de um ponto dado, produzem imagens infinitamente próximas do ponto
dado.
Nesta publicação vamo-nos cingir a fundamentações dentro do quadro da fundamentação clássica de Geometria (6 e subsequentes). Fundamentações baseadas na
definição Kleiniana são remetidas para estudos posteriores (ver 11).
5.3
Conclusões
Fértil parece ser o campo das Geometrias Não-Standard, quer do ponto de vista
da sua conceção, quer do ponto de vista da sua tipificação, quer ainda do ponto
de vista das ferramentas standard e não-standard à sua disposição. Por isso essa
matéria será alvo de estudos futuros.
Neste capítulo abordámos uma das questões fundamentais da investigação: a
definição de Geometria Não-Standard. Mostrámos a existência de várias vias alternativas para a definição de geometrias não-standard. Ilustrámos com vários exemplos a definição proposta e exploramos com exemplos a definição Kleiniana de GNS.
Por outro lado também indicámos o sentido preciso do alcance e das restrições do
campo da investigação.
128
O conceito de Geometria Não-Standard
Parte III
Modelos de Geometria
Não-Standard Não-Arquimediana:
construção e aplicações
129
131
A publicação dos Grundlagen de Hilbert constituiu um marco histórico importante na fundamentação da Geometria, na Lógica e Teoria de Modelos, bem como
em toda a matemática. Dado o estilo, completude e alcance, essa obra impôs uma
linguagem e um método na geometria sintética, que acabaram por se tornar clássicos. Os outros ramos da matemática, tais como a Geometria Analítica e a Análise
usam, por defeito, a linguagem dos Grundlagen.
A obra concebida sob a teoria dos conjuntos de Cantor, Dedekind e Peano,
consagrou o método axiomático a Lógica e Teoria de Modelos na Matemática, na
estrita tradição de Euclides e consagrou a própria Geometria Analítica na esteira de
Descartes e Fermat – ramos essenciais da Matemática moderna. Assim, a tradução
para a linguagem e métodos Hilbertianos, de geometrias provenientes de outros
autores, não só torna essas geometrias mais compreensíveis a todas as pessoas de
formação matemática contemporânea, como permite a estas o recurso um grande
manancial de resultados já estabelecidos, acumulado ao longo dos cem anos dos
Grundlagen. Poucos conseguiram fugir ao estilo, linguagem e métodos, usados nos
Grundlagen. Por isso em muitos autores se encontram apenas algumas pequenas
reformulações e adaptações, advenientes de razões didáticas, de alguma (pouca)
evolução em simbologias, ou pura e simplesmente de razões contextuais.
Esta é a parte central da investigação em que serão investigados modelos de Geometria Não-Arquimediana Não-Standard. Nesta parte recordamos a classificação
das geometrias originária de Hilbert ou baseadas nos seus axiomas, com pequenas
alterações oportunas aos contextos em estudo. Através dessa revisão vamos fixar a
terminologia geométrica ser usada subsequentemente no texto (6). A continuidade é
introduzida, mais adiante através dos axiomas de continuidade Veronese e um modelo Hilbert-Veronesiano sintético de Geometria Não-Standard Não-Arquimediana
(7). A completude de Veronese é mais fraca que a de Dedekind, no sentido em que
aquela inclui esta, mas é absolutamente satisfatória para a geometria, como observa
o próprio Veronese. Uma interpretação analítica do modelo proposta é estudada
no capítulo seguinte (8). Esse estudo inclui a introdução de novos conceitos, sua
exploração e ilustração com exemplos de realização e de aplicação. No 9 são propostos modelos sintéticos de realização do modelo central Hilbert Veronesiano, seu
estudo através da exploração de propriedades e ilustração com exemplos. A comparação com o modelo analítico desenvolvido no capítulo anterior é feita. A presenta
parte da monografia termina com o estudo de um modelo sintético métrico do tipo
Birkhoffiano e algumas suas realizações (10).
132
O conceito de Geometria Não-Standard
CAPÍTULO 6
Revisões do modelo fundacional e
da classificação Hilbertiana de
geometrias
6.1
Introdução
Os Grundlagen de Hilbert, tal como os Elementos de Euclides, têm também um
carácter de sistematização. Com efeito, muitos dos axiomas apresentados na lista
de Hilbert já haviam sido estabelecidos por Euclides, Pasch, Stolz, Helmholtz, e
outros. Porém a sua simplificação, adaptação à recém nascida teoria de conjuntos
(Cantor, Dedekind, Peano) e aos novos desenvolvimentos na teoria dos números reais
(Dedekind, Cantor), a sistematização, a ordenação e o completamento com novos
axiomas, são mérito exclusivo de Hilbert.
Apresentamos a seguir uma versão ligeiramente modernizada (em relação aos
Grundlagen) dos axiomas de Hilbert, baseada na teoria ZFC (Zermelo-Fraenkel
mais Axioma de Escolha) de conjuntos. O que pretendemos neste capítulo é a
caracterização de sub-modelos (restrições) e super-modelos (extensões) do modelo de
Geometria Absoluta de Hilbert, ao mesmo tempo que procedemos a interpretações
desses modelos em planos Cartesianos com vista a preparar o terreno concetual
para a implantação de GNSA. Os modelos de geometria absoluta de Hilbert são
Não-Arquimedianos, logo não contínuos no sentido de Dedekind por não incluírem
qualquer axioma de continuidade.
6.2
Formulação moderna dos axiomas de Hilbert
As noções primitivas necessárias ao modelo de Hilbert são:
i) Um conjunto, , chamado plano;
ii) Uma classe de subconjuntos de , chamados retas;
iii) Três relações entre subconjuntos de : , ≡ e , designadas respetivamente por ordem, congruência e continuidade.
133
134
Revisões do modelo fundacional e da classificação Hilbertiana de geometrias
Os elementos de são chamados pontos, e como usualmente, são notados por
, possivelmente com índices. As expressões “ está em ”,
“ incide em ”, “ é um ponto de ”, são equivalentes a ∈
Os elementos de são notados por , possivelmente com
índices. As expressões “ é ponto de ”, “ incide em ”, “ passa por ”, equivalem
a ∈ ; a expressão “ corta ” equivale a ∩ 6= ∅; a expressão “ é paralela a
” equivale a ∩ = ∅
A expressão − − , que significa que está entre e .
Os axiomas de Hilbert são os seguintes1 :
Grupo I. Axiomas de incidência
I1. (extensão) Numa reta incidem pelo menos dois pontos (distintos);
I2. (determinação) Dois pontos (distintos) incidem numa e numa só reta;
I3. (existência) Existem três pontos (distintos) não colineares;
←→
A única reta que passa por e denota-se .
Grupo II. Axiomas de ordem
II1. (simetria) Se − − então são distintos, colineares, e tem-se
também − − ;
←→
II2. (existência) Se 6= então existem em tais que − − ,
− − e − − ;
II3. (retilinearidade) Se são distintos e colineares então um e um só deles
está entre os outros dois.
II4. (separação) Para qualquer reta e pontos não em :
a. Se estão do mesmo lado de e estão do mesmo lado de então
estão do mesmo lado de
b. Se estão em lados opostos de e estão em lados opostos de então
estão do mesmo lado de .
Grupo III. Axiomas de congruência
III1. (movimento de segmentos) Dados os pontos 6= e 0 , para toda
a semirreta emanando de 0 existe um único ponto 0 pertencente a tal que 0
diferente de 0 e congruente 0 0 ;
III2. (Equivalência de segmentos) Todo o segmento é congruente consigo próprio.
Além disso se ≡ e ≡ então ≡ ;
III3. (Adição de segmentos) Se − − , 0 − 0 − 0 , = 0 0 e =
0 0 , então = 0 0 ;
−−→
III4. (Movimento de ângulos) Dado um ângulo ∠ e uma semirreta 0 0
−−→
−−→
existe uma única semirreta 0 0 em um dado lado de 0 0 tal que ∠ 0 0 0 ≡
∠;
III5. (Equivalência de ângulos) Todo o ângulo é congruente consigo próprio.
Além disso se ∠ ≡ ∠ e ∠ ≡ ∠ então ∠ ≡ ∠;
III6. (Critério LAL) Se dois lados de um triângulo e o ângulo por eles formado,
forem congruentes a dois lados e ao ângulo por eles formado de outro triângulo
respetivamente, então os dois triângulos são congruentes;
1
As definições são as usuais e podem ser encontradas, por exemplo em [41] e [32].
6.3
Classificação hilbertiana de geometrias e alguns resultados básicos
135
Grupo IV. Axiomas de continuidade (linear)
IV1 – Axioma de Arquimedes: Se e são dois segmentos quaisquer,
←→
então há na reta um número finito de pontos 1 2 tais que os segmentos
1 1 2 −1 são congruentes com o segmento e = ou está
entre e ;
IV2 – Axioma de Dedekind: Supondo que uma reta é a união de dois conjuntos
não vazios, = Σ1 ∪ Σ2 de tal modo que nenhum ponto de Σ1 está entre dois pontos
de Σ2 e vice-versa, então existe um único ponto ∈ tal que, para quaisquer pontos
1 2 de , está entre 1 e 2 se e só se 6= 1 , 6= 2 e um dos pontos
1 2 está em Σ1 se e só se o outro está em Σ2 ;
Grupo V. Axiomas de paralelismo
V1 – Axioma de Hilbert para a Geometria Euclidiana:
Para toda a reta e todo o ponto não pertencente a existe quando muito
uma reta paralela a passando por .
ou
V ’1 – Axioma da Geometria hiperbólica:
Para toda a reta e todo o ponto não pertencente a , existem, pelo menos,
duas paralelas a , passando por .2
O modelo básico ou fundamental de Hilbert é do tipo
M = ( ≡ )
onde , o suporte da estrutura, é um conjunto de pontos constituindo um plano;
é um conjunto de conjuntos de pontos de , chamados retas de modo que (
) constitui um modelo dos axiomas de incidência (planares), isto é, os pontos e
retas de satisfazem a uma relação de incidência postulada nos axiomas 1 → 3
de Hilbert; é uma relação de ordem em de tal modo que os elementos de
( ) cumprem os axiomas II1 – II4; ≡ é uma relação de congruência que
satisfaz os axiomas III1 – III5.
6.3
Classificação hilbertiana de geometrias e alguns resultados básicos
A classificação Hilbertiana ou clássica das geometrias é a que foi standardizada
pelos Grundlagen, através do agrupamento dos axiomas. Essa classificação inclui as
geometrias de incidência, ordem e congruência – Euclidiana, Não-Arquimediana,
Não-Pascaliana, Não-Arguesiana.
2
Recorde-se que o axioma de paralelismo da Geometria Elíptica (Para toda a reta e todo o
ponto não pertencente a , não existe qualquer paralela a , passando por ) é incompatível
com os restantes axiomas.
136
6.3.1
Revisões do modelo fundacional e da classificação Hilbertiana de geometrias
Geometria da relação de incidência
Com o objetivo de rever as técnicas da geometria de Hilbert, nesta subsecção recordamos alguns resultados deduzidos dos axiomas de incidência, com principal relevância para os do plano (I1-I3), incluindo algumas demonstrações clássicas. Os axiomas
do grupo I constituem os fundamentos da Geometria da Incidência.
Teorema 6.1 Duas retas (distintas) têm quando muito um ponto comum.
Dem. Sejam dadas as retas distintas , e suponhamos, com vista a um absurdo,
que existem dois pontos distintos, e , comuns a e a . e incidem em ,
e também incidem em . Pela 2 parte de I2 não pode ser 6= , o que é absurdo.
Portanto, e não podem ter mais de um ponto comum.¤
Corolário 6.1 Duas retas (distintas) [contidas num mesmo plano], não paralelas
tem um único ponto comum.
Dem. Se 6= e não é paralela a , então, por definição de paralelismo de duas
retas, e têm pelo menos um ponto comum, digamos . Pelo Teorema 6.1, e
não têm mais nenhum ponto comum, logo é o único ponto comum a e .¤
Teorema 6.2 Para toda a reta r existe pelo menos um ponto que não incide em
.¤
Teorema 6.3 Para todo o ponto existe pelo menos uma reta que não passa por
.¤
Teorema 6.4 Para todo o ponto existem pelo menos duas retas (distintas) que
passam por .
Dem. Dado um ponto , pelo axioma I3, existem pelo menos outros dois pontos, digamos e , distintos entre si e distintos de , tais que não são
colineares. Por I2, e determinam uma única reta, digamos ; analogamente,
e determinam uma única reta, digamos . Não pode ser = , visto não
serem colineares, logo 6= , e o ponto é comum a e .¤
Teorema 6.5 Em todo o plano existem pelo menos três retas (distintas) não concorrentes.
Dem. Sejam três pontos (distintos) não colineares, que existem por I3.
←→
Por I2, cada par de pontos de entre determina uma reta, digamos = ,
←→
←→
= , = . Resta ver que são distintas duas a duas, e não concorrentes.
Tem-se 6= , pois caso contrário seriam colineares. Analogamente 6= e
6= . e têm um único ponto comum, que é (Teorema 6.1); analogamente
e têm um único ponto comum, que é ; se as três retas concorressem num ponto,
esse ponto teria de ser = , contrariando a hipótese.¤
Consideramos agora alguns teoremas em cuja demonstração pode ocorrer um
qualquer dos axiomas da incidência I1-I6 (não necessariamente planares).
6.3
Classificação hilbertiana de geometrias e alguns resultados básicos
137
Teorema 6.6 Uma reta e um ponto que não incide nela determinam um único
plano.
Dem. Sejam dados uma reta , e um ponto ∈
. Mostre-se, em primeiro lugar
que existe um plano contendo e passando por . Por I1, em incidem (pelo
←→
menos) dois pontos distintos, digamos e , e, por I2, = . Visto ∈
, os
pontos são distintos e não colineares. Por I4 estes pontos determinam um
único plano, digamos . Por I5, ⊂ , e é claro que ∈ . Resta provar que é
o único plano tal que ⊂ e ∈ . Pois se é um plano tal que ⊂ e ∈ ,
então também ∈ . Visto ∈ e ∈ , por I4 é = .¤
Nota 6.1 O plano determinado por três pontos distintos não colineares
designa-se . Pelo teorema 6.6, dada uma reta e um ponto ∈
, faz sentido
designar o (único) plano contendo e passando por por ou .
6.3.2
Geometria ordenada
Na Geometria da Incidência não se pode falar em segmentos, ângulos, triângulos,
perpendicularidade, etc., pois estes conceitos envolvem noções primitivas como a de
“entre”, sobre a qual os axiomas de incidência nada referem.
Como se viu, Hilbert baseia os seus quatro axiomas da ordem (Grupo II) na
noção “situado entre”, ou apenas de “entre”.
Os axiomas II1-II4, cujas consequências são apresentadas abaixo, constituem,
juntamente com os axiomas de incidência, os fundamentos da Geometria Ordenada.
Definição 6.1 (segmento de reta) Um segmento de reta é o conjunto dos
pontos tais que − − , juntamente com os pontos extremos e .
−→
Definição 6.2 (semireta) semirreta = ∪ { : − − }.
Nota 6.2 Repare-se que II2 assegura a existência pontos tais que − − , de
−→
modo que ⊂ , pelo que as definições são boas.
Teorema 6.7 Para quaisquer pontos distintos tem-se
−→ −→
(i) ∩ =
−→ −→ ←→
(ii) ∪ =
Dem. (i) Tem-se sempre, em virtude das definições de segmento e de semirreta,
−→
−→
−→ −→
⊂ e ⊂ , logo ⊂ ∩ , de modo que só falta provar que
−→ −→
−→ −→
∩ ⊂ . Tome-se ao arbítrio ∈ ∩ . Se = ou = é imediato
que ∈ ; no outro caso 6= e 6= ; mas são colineares (definição
de semirreta e II1) e distintos uns dos outros, logo, por II3, tem-se − − ou
−→
− − ou − − ; não pode ser − − , pois então viria ∈
−→
e ∈
, por II3; pela mesma razão não pode ser − − logo só pode ser
− − , e portanto ∈ .
(ii) Imediata.¤
138
Revisões do modelo fundacional e da classificação Hilbertiana de geometrias
−→
Nota 6.3 Note-se que II2 garante que toda a semirreta tem uma semirreta
−→
oposta, digamos , para algum ponto tal que − − .
Definição 6.3 (posição relativa de pontos) Num dado plano contendo uma reta
e dois pontos não em , diz-se que
(i) e estão do mesmo lado de se e só se = ou intersecta ;
(ii) e estão em dados opostos de se e só se 6= e intersecta .
Resulta desta definição que dois pontos distintos não em ou estão do mesmo
lado, ou em lados opostos de , pois que o segmento que os une ou não intersecta
ou intersecta , respetivamente.
Proposição 6.1 “Estar do mesmo lado de ” é uma relação de equivalência.
Dem. Com efeito, um ponto não em está do mesmo lado de que ele próprio
(reflexividade) , e que se está do mesmo lado que então está do mesmo
lado que (simetria); o axioma II4a diz que a relação “estar do mesmo lado de ”,
definida nos pontos de um plano que não estão em , é transitiva.¤
As classes de equivalência são os semiplanos limitados por .
Tem-se a
Definição 6.4 (semiplano) Dado um plano , e uma reta nele contida, um
semiplano limitado por é um conjunto de pontos do plano constituído por
todos os pontos que estão do mesmo lado de que um ponto dado de , não em
.
Teorema 6.8 Uma reta limita exatamente dois semiplanos sem pontos comuns.
Dem. Dada uma reta , existe 6= e ∈ . Por II2 existe um ponto tal
que − − . Por definição, e estão em lados opostos de , logo limita
pelo menos dois semiplanos. Estes não podem ter nenhum ponto comum, pois caso
contrário, por II4a, e estariam do mesmo lado de .
Para terminar tem-se que qualquer ponto ∈
está num daqueles semiplanos.
Assim é, trivialmente, se = ou = . Suponha-se pois que 6= e
6= e que não está do mesmo lado que ; mostra-se que está do mesmo
lado que . Pois por hipótese, e estão de lados opostos de , mas e estão
de lados opostos de , por construção, logo, por II4b, e estão do mesmo lado
de .¤
Teorema 6.9 Se − − e − − então − − e − − .
Dem. Suponha-se que − − e − − . Então são distintos
uns dos outros e colineares, por II1 e I2.
←→
Prove-se, em primeiro lugar, que − −. Para tal, considere-se a reta =
←→
e um ponto ∈
. A reta = intersecta no ponto , e como − − por
hipótese, e estão em lados opostos de .
6.3
Classificação hilbertiana de geometrias e alguns resultados básicos
139
Por hipótese, também − − , logo e estão do mesmo lado de (caso
contrario, intersectaria , necessariamente no ponto , logo viria − −
contrariando II3).
Então, por II4b, e estão em lados opostos de , logo corta , necessariamente no ponto o que prova que − − . Analogamente se prova que
←→
− − , considerando em vez de a reta = .¤
Corolário 6.2 (separação nas retas) Se − − então para todo o ponto
←→
−→
−→
da reta = , ∈ ou ∈ .
←→
Dem. Sejam dados os pontos tais que − − , ∈ = .
−→
−→
Prova-se que se ∈
então ∈ , o que prova o resultado. Tem-se que, por
−→
−→
definição de e por II3, se ∈
só pode ser − − . No caso = é
−→
imediato que ∈
. No caso 6= , novamente por II3 temos em princípio uma
e uma só das alternativas − − , − − , − − ; qualquer uma das duas
−→
−→
últimas implica ∈ , por definição de , logo o Corolário fica demonstrado se
se provar que a primeira hipótese é impossível, por conduzir a um absurdo.
Suponhamos pois, com vista a um absurdo, que − − . Considerando os
três pontos (distintos) tem-se uma só das posições relativas seguintes, por
II3
(i) − − , ou seja − − (II1)
(ii) − −
(iii) − − , ou seja − −
Visto ser − − por hipótese, ou seja, − − por II1, combinado com
(i) resulta que − − , pelo teorema 6.9, o que contradiz II3, com a hipótese
− − .
(ii) com − − dá também − − pelo teorema 6.9, contrariando a
−→
hipótese − − (de ∈
), por II3. Finalmente, combinando (iii) com
− − dá, igualmente pelo teorema 6.9, ( − − ), contrariando − − ,
por II3.
Em qualquer dos casos (i), (ii), (iii) que resultam de − − chega-se a um
absurdo. Logo, não se tem − − .¤
Teorema 6.10 ( de Pasch) Dados o ∆ e uma reta que intersecta num
ponto entre e , então também intersecta um dos outros lados. Se além disso
∈
então não intersecta ambos os outros lados do triângulo.
Dem. Dados o ∆ e uma reta intersectando num ponto entre e ,
é óbvio que se ∈ então intersecta ambos os lados e , precisamente no
ponto .
Mostra-se que, na hipótese ∈
, intersecta um somente dos lados .
Visto por hipótese e estarem em lados opostos de e ∈
, podemos
concluir (por II4 e teorema 6.8) que
(i) está do mesmo lado de que , ou
140
Revisões do modelo fundacional e da classificação Hilbertiana de geometrias
(ii) está do mesmo lado de que .
No primeiro caso está do lado oposto de , por II4b, logo intersecta e
não intersecta . No segundo caso, por argumento análogo, intersecta e não
intersecta .¤
Definição 6.5 (posição de um ponto em relação a um ângulo) Um ponto
←→
diz-se interior a um ângulo ∠ se e só se está do mesmo lado de que
←→
e do mesmo lado de que . O interior do ∠ é o conjunto dos pontos
interiores a ∠ (e é pois, a intersecção de dois semiplanos).
←→
Teorema 6.11 Dado um ângulo ∠ e um ponto sobre a reta , está no
interior de ∠ se e só se − − .¤
←→
Nota 6.4 Note-se que é dado sobre a reta . Não se deve assumir que todo
o ponto interior a um ângulo dado está sobre um segmento com um extremo em
cada um dos lados do ângulo. De fato, esta propriedade não se pode deduzir dos
axiomas até agora admitidos, sendo mesmo falsa em planos hiperbólicos (modelos
da Geometria Hiperbólica).
Teorema 6.12 Se é interior ao ∠ então:
−−→
(a) Todo o ponto de exceto é interior ao ∠;
−−→
(b) nenhum ponto da semirreta oposta a e interior ao ∠;
(c) se − − então é interior ao ∠.¤
Definição 6.6 (ordem em semiretas) Dado um ∠ e um ponto , diz-se
−−→
−→ −→
que esta entre e se e só se e interior a ∠.
Nota 6.5 Note-se que, pelo teorema 6.12(a) esta definição não depende do ponto
−−→
−−→
−−→
sobre , quer dizer, se e qualquer ponto de distinto de então está
−→ −→
−→
−→ −→
−−→ −→
entre e se e só se esta entre e (e é claro que = ).
−−→
Teorema 6.13 (barra transversal) Dado ∠, e um ponto , se está
−→ −→
−−→
−−→
entre e , então intersecta .
−−→
−→ −→
Dem. Suponhamos entre e . Se não intersectasse , então
e estariam do mesmo lado de .
Seja tal que − − , de modo que, pelo teorema 6.12(c), é interior a
∠. Visto intersectar no ponto , e estão do mesmo lado de ,
logo, pelo axioma de separação II4a, e estariam do mesmo lado de , o que
−−→
é absurdo. Portanto, e estão em lados opostos de , o que significa que
−−→
−−→
corta , necessariamente (pelo teorema 6.12 (b)) num ponto de .¤
6.3
Classificação hilbertiana de geometrias e alguns resultados básicos
141
Definição 6.7 (posição de um ponto em relação a um triângulo) Dado um
triângulo ∆ e um ponto , diz-se que é interior ao ∆ se e só se é
interior a cada um dos ângulos do triângulo; e diz-se que e exterior ao ∆, se
e só se não é interior nem está sobre nenhum dos lados do ∆. O interior de
um triângulo é o conjunto dos seus pontos interiores, e o exterior de um triângulo
é o conjunto dos seus pontos exteriores.
Teorema 6.14 (a) Se uma semirreta com origem num ponto exterior a um triângulo ∆ intersecta o lado num ponto entre e , então também intersecta
um dos outros lados.
(b) Se uma semirreta tem origem num ponto interior a um triângulo ∆,
então ela intersecta um dos lados e, se não passar por um vértice, intersecta um
único lado.¤
Teorema 6.15 Todo o modelo da Geometria Ordenada é infinito.¤
6.3.3
Geometria absoluta
Antes de tudo, uma observação notacional: utilizamos aqui a designação "Geometria
Absoluta", com um significado diferente do usual. Muitos autores chamam Geometria Absoluta ou neutra aos modelos baseados nos grupos I, II, III e IV dos axiomas
de Hilbert, justificando a sua opção por cada uma das designações3 . Aqui não vamos
entrar nesse debate, havendo a preferência pela designação de Geometria Absoluta
aos modelos baseados apenas nos três primeiros grupos de axiomas (excluindo os
axiomas de continuidade e de paralelas), reservando-se a designação de Geometria
Neutra para os modelos dos quatro primeiros grupos – excluindo, portanto, apenas
os axiomas de paralelas4 .
Vejamos agora as principais consequências dos axiomas da relação de congruência, a última noção primitiva que falta considerar é a noção da relação de congruência
simbolizada por “ ≡ ”. Trata-se de uma relação inicialmente definida apenas entre segmentos e entre ângulos, mas que se estende para definições a outras figuras
como triângulos, por exemplo. Consideramos aqui a congruência do ponto de vista
intrínseco (sintético) isto é, sem pressupor um isomorfismo entre os números reais e
o conjunto dos segmentos ou dos ângulos.5
Definição 6.8 (triângulos congruentes) Dois triângulos ∆ ∆ dizemse congruentes e escreve-se ∆ ≡ ∆ se e só se existir uma bijeção entre
os vértices de um e os vértices do outro de modo que lados correspondentes sejam
congruentes e ângulos correspondentes sejam congruentes.
3
Ver Greenberg [41], por exemplo.
Poder-se-ia adotar a designação de Geometria Surda. Porém a deselegância, aliada à necessidade de economia de termos, levam à opção tomada.
5
O ponto de vista métrico é adoptado, mais adiante, no 9.
4
142
Revisões do modelo fundacional e da classificação Hilbertiana de geometrias
Para facilitar a notação, vamos supor, ao escrever ∆ ≡ ∆ , que, na
bijeção referida, corresponde a , a , e a , o que se notará ←→ ,
←→ , ←→ , de modo que ≡ , ∠ ≡ ∠, etc.
Teorema 6.16 (pons asinorum) Num ∆, se ≡ então ∠ ≡ ∠ .
Dem. (Papo, 300 D.C.) Considere-se a correspondência entre os vértices de
∆ e de ∆. É óbvio que, nesta correspondência, dois lados de ∆ e o
ângulo por eles formado são congruentes com os lados correspondentes com o ângulo
por eles formado respetivamente de ∆ (usando III 5 e a hipótese). Por III6,
∆ ≡ ∆, logo ∠ ≡ ∠, por definição de congruência de triângulos.¤
Teorema 6.17 (subtração de segmentos) Se −− , −− , ≡
e = , então ≡ ¤
Teorema 6.18 Se = , então para todo o ponto entre e existe um
único ponto entre e tal que = .
−−→
Dem. Se = e um ponto entre e , pelo axioma III1 existe ∈
tal que ≡ . está entre e : pois caso contrário, ter-se-ia =
−−→
ou − − , por definição de . Se = viria ≡ ≡ ≡
−→
com 6= ambos em , contradizendo a unicidade no axioma III 1. E se fosse
−→
− − , por III I existiria na semirreta oposta a tal que ≡ .
Pelo axioma de adição de segmentos III 3 viria ≡ Logo existiriam 6=
−→
em tais que ≡ ≡ contradizendo novamente a unicidade no axioma
III1. Portanto − − .¤
Podemos agora definir uma “relação de ordem” entre segmentos do seguinte
modo:
Definição 6.9 (comparação de segmentos) Dados dois segmentos , dizse que é menor que (ou é maior que ) , e escreve-se (ou
) se e só se existe entre e tal que ≡
Teorema 6.19 (ordenação de segmentos) Para quaisquer segmentos , ,
,
(a) Tem-se uma e uma só das relações
= (tricotomia)
(b) Se e ≡ então .
(c) Se e = então .
(d) Se e então
Nota 6.6 Notemos que, de (a) resulta imediatamente (em virtude da primeira parte
de III2) a irreflexividade: para qualquer segmento , ≮ (≮ é a negação
de ).
6.3
Classificação hilbertiana de geometrias e alguns resultados básicos
143
Teorema 6.20 (a) Ângulos suplementares (adjacentes) de ângulos congruentes são
congruentes;
(b) Ângulos verticalmente opostos são congruentes entre si;
(c) Todo o ângulo congruente a um ângulo reto é reto.¤
Teorema 6.21 Para toda a reta e todo o ponto existe uma reta passando por
e perpendicular a .
I1)
Dem. 1 caso: ( ∈
) Sejam quaisquer dois pontos de , distintos (axioma
−→
No lado oposto de em relação a existem e tais que ∠ = ∠
, pelo axioma III 4.
−→
0
0
Por III 1, existe 0 em tal que ≡ . intersecta (pois e 0
estão em lados opostos de ), digamos num ponto .
0
Se = então ∠ = ∠ , logo ⊥ , por definição de perpendicularidade.
Se 6= então tem-se, por III 6 (LAL) ∆ = ∆ 0 logo ∠ ≡
0
∠ 0 (ângulos correspondentes), logo também ⊥ .
2 caso: ∈ . Visto haver pontos não em (axioma I3) por um qualquer deles
pode-se fazer passar uma perpendicular a , pelo 1 caso já demonstrado, obtendose assim um ângulo reto. Com vértice em e um lado contido em obtém-se um
ângulo congruente àquele (axioma III4). Ora, o outro lado deste ângulo está contido
numa reta ⊥ passando por , em virtude do teorema 6.19(c) .¤
Teorema 6.22 (critério ALA) Se nos triângulos ∆ e ∆ se tem ∠ ≡
∠ e ∠ ≡ ∠ e ≡ , então ∆ = ∆¤
Teorema 6.23 (recíproco do pons asinorum) (R) Se no ∆ se tem ∠ ≡
∠, então ≡ e ∆ é isósceles.¤
−−→
−→ −−→
Teorema 6.24 (adição de ângulos) (A) Dados entre e , entre
−−→ −→
e , ∠ ≡ ∠ e ∠ ≡ ∠, então ∠ ≡ ∠ .
Dem. Pelo Teorema da barra transversal, pode-se supor entre e . Pelo
Axioma III 1 pode-se supor escolhidos de tal modo que ≡ , ≡
e = . Então, pelo critério (axioma III 6) tem-se
(1) ∆ ≡ ∆
e
∆ ≡ ∆
Por se tratar de ângulos correspondentes em triângulos congruentes, tem-se
∠ ≡ ∠
144
e
Revisões do modelo fundacional e da classificação Hilbertiana de geometrias
∠ ≡ ∠
Alem disso, por posição de , ∠ é suplementar de ∠. Ângulos suplementares de ângulos congruentes são congruentes, logo ∠ é suplementar de
∠ e, pela parte de unicidade de III4 e são colineares.
−−→
−−→ −→
Visto por hipótese estar entre e , pelo teorema 6.11, está entre
e . Então, por (1) e III 3 (Adição de Segmentos), ≡ logo, pelo critério
, ∆ ≡ ∆ , e portanto ∠ ≡ ∠ (ângulos correspondentes em
triângulos congruentes).¤
−−→
−−→
Teorema 6.25 (subtração de ângulos) Dados entre e , entre
e , ∠ ≡ ∠ e ∠ ≡ ∠ , então ∠ ≡ ∠¤
Definição 6.10 (comparação de ângulos) Diz-se que ∠ é menor que ∠ ,
escreve-se
∠ ∠ (ou ∠ ∠)
−
−
→
−−→ −→
sse existe entre e tal que ∠ ≡ ∠ .
Teorema 6.26 (ordenação de ângulos) (a) Para quaisquer dois ângulos ∠ ∠,
verifica-se uma e uma só das condições
∠ ∠; ∠ ≡ ∠; ∠ ∠
(tricotomia);
(b) Se ∠ ∠ e ∠ ≡ ∠ então ∠ ∠ (compatibilidade);
(c) Se ∠ ∠ e ∠ ≡ ∠ então ∠ ∠ (compatibilidade);
(d) Se ∠ ∠ e ∠ ∠ então ∠ ∠ (transitividade).¤
Teorema 6.27 (Critério LLL) Dados ∆ e ∆ , se ≡ , ≡
e ≡ , então ∆ ≡ ∆ .¤
Teorema 6.28 (4 postulado de Euclides) Todos os ângulos retos são congruentes entre si.
Dem. 1. Hipótese : dados dois pares de ângulos retos, ∠ ≡ ∠, ∠
≡ ∠
2. Suponhamos, com vista a um absurdo que ∠ não é congruente ao
∠ .
3. Pelo teorema 6.26 um destes ângulos é menor que o outro, digamos que é
−→
−→ −−→
∠ ∠, de modo que existe entre e tal que ∠ ≡ ∠ .
4. Pelo teorema 6.19(a) ∠ ≡ ∠
5. Por 1, 4 e ≡ ser uma equivalência, vem ∠ ≡ ∠ .
6. Visto ∠ ≡ ∠ por hipótese e ∠ ∠ por construção,
−−→
−−→ −→
é ∠ ∠ pelo Teorema 31(b), logo existe entre e tal que,
∠ ∠.
6.4
Conclusões
145
7. Por outro lado, de 3 e 5, por ≡ ser equivalência, vem ∠ ≡ ∠.
8. De 6 e 7 vem logo, ainda por ≡ ser equivalência, ∠ ≡ ∠.
9. Ora, tem-se por construção que ∠ ∠ logo por 8 e teorema 6.26(
b) ∠ ∠. Mas simultaneamente ∠ ∠, pelo teorema 6.12(c)
(pois é interior ao ∠ por construção, logo é interior ao ∠, isto é,
−−→
−→ −→
está entre e ), o que contradiz a primeira parte do teorema 6.26.
10. O absurdo obtido em 9 resulta de se ter suposto que ∠ não é congruente
a ∠ . Portanto, estes ângulos são congruentes.¤
6.4
Conclusões
A classificação Hilbertiana das geometrias elementares foi definitiva. Ela foi feita de
forma simples e elegante, logicamente irrepreensível e matematicamente profundo.
Os Grundlagen de Hilbert constituíram um ponto de viragem na Matemática com
o fecho com chave de ouro do capítulo dos Fundamentos da Geometria. A partir
desse momento a Geometria Analítica desenvolveu-se sem barreiras, assim como a
Álgebra linear subjacente. O desenvolvimento dessas áreas proporcionou o rápido
desenvolvimento da Geometria Diferencial, da teoria das Equações Diferenciais, da
Mecânica, da Física Matemática, etc. Tratou-se sem dúvida de um marco importante na história da Matemática.
Neste capítulo passamos em revista a classificação Hilbertiana das geometrias
elementares, modernizando ligeiramente a linguagem – baseada em ZFC, tal como
Greenberg [41], Franco de Oliveira [32] e outros. Essa linguagem e as notações são
fixadas para o resto do texto.
146
Revisões do modelo fundacional e da classificação Hilbertiana de geometrias
CAPÍTULO 7
Modelo geral Hilbert-Veronesiano
de GNSNA
7.1
Introdução
No seu caminho para a fundação da Geometria, como referimos, quer Hilbert, quer
Veronese, incorporaram axiomas dos seus antecessores, a saber, Euclides, Pasch,
Stolz, Helmholtz, e outros. Este fato é por si só indicador de uma equivalência
possível entre os axiomas básicos assumidos por um e por outro. Mas, nos seus
Fondamenti, Veronese visa, desde os primeiros axiomas (referentes à forma fundamental), “um sistema Não-Arquimediano de grandezas (geométricas)”, o mais geral
possível, o que o afasta do caminho seguido, mais tarde, por Hilbert. Veronese
acaba por adotar axiomas baseados em conceitos como “igualdade relativa” e “ordens de grandeza relativas”, que nada têm a ver com a tradição de então. Porém,
no que concerne à Geometria propriamente dita, se ele tivesse, tão simplesmente,
adotado um conjunto de axiomas, formalmente do tipo Hilbertiano, para incidência, ordem e congruência, mais os axiomas Veronesianos de continuidade, chegaria
à mesma geometria que exibe nos seus Fondamenti, pelo menos na parte elementar
da mesma1 .
Hilbert não faz qualquer rutura com os axiomas históricos, e consegue com os
grupos de axiomas I, II e III uma base comum para a geometria comum (Arquimediana) e para a Geometria Não-Arquimediana. É essa base que aproveitamos
para a formulação de um modelo de Geometria Não-Standard Não-Arquimediana,
contínua à Veronese. Assim, neste capítulo vamos estabelecer o modelo de GNSA,
baseado na Geometria Absoluta de Hilbert, acrescido dos axiomas de continuidade
de Veronese. Os axiomas de paralelismo serão adotados, mais tarde, conforme as
necessidades.
1
Mas, como referimos, as preocupações de Veronese ultrapassavam de longe a fundação da
geometria elementar.
147
148
Modelo geral Hilbert-Veronesiano de GNSNA
7.2
Axiomas de continuidade
Os axiomas de continuidade são acrescentados aos modelos de Geometria Absoluta,
para garantir a continuidade das figuras, em particular, da reta2 . São axiomas
independentes dos da Geometria Absoluta3 .
Vai-se começar por recordar o axioma de continuidade de Cantor4 , que é a matriz
concetual da continuidade Veronesiana.5
7.2.1
Axioma de continuidade de Cantor
Axioma 7.1 Se num segmento de reta duas sucessões de segmentos
1 2 3 ∧ 01 02 03
tais que os segmentos da primeira sucessão crescem indefinidamente e que os segmentos da segunda sucessão decrescem indefinidamente, e isso de modo que os segmentos
1 01 2 02 3 03
decrescem constantemente, até se tornarem menores que um segmento arbitrário, pré
fixado – por menor que seja, a partir de um índice (que depende naturalmente
da escolha desse segmento), então existe no segmento um ponto tal que
é maior que todos os segmentos da primeira sucessão e menores que todos os
segmentos da segunda sucessão.
Notemos que, como tinha em mente a continuidade Dedekindiana (isto é, Arquimediana), Cantor acrescentou a este axioma, o da perfeição6 , que não é considerado
por Veronese.
7.2.2
Axiomas de continuidade de Veronese
Vamos proceder a uma nova visita às hipóteses ou axiomas de continuidade de
Veronese, com vista à sua formulação em ZFNC.
Nos primórdios da formulação dos seus axiomas de continuidade, Veronese começa
por demonstrar que o axioma de continuidade de Cantor é independente do axioma
de Arquimedes. Percebendo que era exatamente o que queria (para estabelecer o
seu contínuo Não-Arquimediano), aprofunda e generaliza as ideias de Cantor, formulando como se segue os seus axiomas.
2
Ver Apêndice 4 de [31], para uma breve notícia histórica.
Veronese demonstrou a independência do axioma de Cantor e dos dele próprio [72] e Hilbert
mostrou a independência do axioma de Arquimedes e do de Dedekind[50].
4
Hoje também conhecido como princípio do encaixe.
5
Os axiomas de continuidade de Hilbert não serão questão nesta secção.
6
Ver Apêndice 4 de [31].
3
7.2
Axiomas de continuidade
149
Axioma de continuidade relativa A segunda condição de continuidade de
Veronese, que chama hipótese de continuidade relativa, apareceu no contexto próprio
de geometria sintética dos Fondamenti (pág.128). Para formular esse axioma, há
que, em primeiro lugar, recordar o conceito de classe Arquimediana: Γ ⊂ é uma
classe Arquimediana se, para todos os , de Γ e são finitos um em relação ao
outro, isto é, existem ∈ N tais que e .
Como vimos no 2, Veronese formula assim o axioma:
Todo o segmento 0 que tendo os extremos sempre variáveis em
sentidos opostos se torna indefinidamente pequeno, contém um elemento
fora do campo de variabilidade dos seus extremos7 .
Reformulando ligeiramente a linguagem, tem-se:
– Se e são subconjuntos não vazios de uma classe Arquimediana Γ de
onde não tem maior elemento, não tem menor elemento, e todo o elemento de
precede todo o elemento de , e se para cada elemento de Γ existem elementos
de e de para os quais ( ) , então existe um ∈ que está estritamente
entre os membros de e os de , ( ∈ Γ0 6= Γ)
Axioma de continuidade absoluta A primeira condição de continuidade foi
publicada por Veronese em 1889 [25], e mais tarde, em 1891, nos Fondamenti,
chamou-o de princípio de continuidade absoluta. Veronese formula o princípio para
um sistema de grandezas com certas propriedades (uma álgebra de segmentos8 ),
tendo em mente sistemas de segmentos não orientados de uma reta Euclidiana, com
certas propriedades, entre as quais as seguintes
i) ∀ ∈ − {0} + (positividade estrita);
ii) − {0} não tem ínfimo (ausência de um menor elemento positivo).
No caso de estruturas como a condição ii) é equivalente a assumir que sempre
que
∀ ∈ ( ⇒ ∃ ∈ : )
isto é, dados dois elementos de , existe sempre um terceiro elemento de que os
interpola.
Veronese [(Fondamenti, pág. 608-610)] enuncia assim o princípio:
– Se um segmento (intervalo) 0 de , cujas extremidades variam sempre
em sentidos opostos, se tornar indefinidamente pequeno, existe sempre em 0 um
elemento de diferente de e de 0 [([72], pág. 612, hipótese IV)].
Se se simplesmente substituir as referências às variáveis e 0 pelos conjuntos
e de valores que as variáveis assumem, então, na base das definições de Veronese,
chega-se à seguinte formulação da condição popularizada por O. Hölder (1901):
7
Isto é, fora do campo das escalas de e 0 Esta hipótese quantifica o espaço ao considerar
que a “variabilidade” de e de 0 acontece “aos saltos” nas respetivas escalas, fazendo então
sentido, de acordo com hipóteses anteriores, falar em campo de variabilidade e em elementos fora
desses campos.
8
Como vimos, no capítulo 2, Hilbert mostrou, na esteira de Euclides, que um corpo de segmentos
é isomorfo a um corpo numérico. Na secção 8.2 voltamos a esse isomorfismo.
150
Modelo geral Hilbert-Veronesiano de GNSNA
– Se e são conjuntos não vazios de onde não tem maior elemento e
não tem menor elemento, e todo o elemento de precede todo o elemento de , e
se para todo o elemento positivo de existem elementos de e de para os
quais − , então existe um em que está estritamente entre os elementos de
e os de .
Além disso, como o elemento é único (1889, pág.612), a condição pode também
ser enunciada na seguinte forma, que foi divulgada por Schöenflies (1906, pág. 26)
, e que mais claramente sublinha a sua relação com a condição de continuidade de
Dedekind:
– Se o par ( ) de subconjuntos de é um corte de tal que para todo o
elemento positivo de existem elementos de e de para os quais ( ) =
| − | , então ou tem maior elemento ou tem menor elemento, mas não se
dá ambos os casos.
Trata-se pois da condição de Dedekind, mais a condição métrica
0 ( )
∀ ∈ ∈ 0
É fácil ver que em presença do axioma de Arquimedes (e apenas nesse caso),
a condição métrica de Veronese sobre os cortes é invariavelmente satisfeita, logo
supérflua.
Além disso, Veronese mostrou que, se ( ) é um corte num corpo Não-Arquimediano que satisfaz essa condição, então as diferenças entre os elementos de e os
de têm de se tornar arbitrariamente pequenos em relação a qualquer elemento
positivo do corpo, pelo que, como vimos no capítulo 3, um elemento positivo é
dito infinitamente pequeno em relação a um elemento positivo , se e só se
para todos os inteiros positivos .
Formulação da continuidade veronesiana na teoria IST Uma maneira de
formular os axiomas acima, na linguagem da teoria IST é a seguinte:
Axioma 7.2 (VC1) — Axioma da continuidade relativa– Para toda a reta
e todo o segmento ⊂ || 0 existem ∈ tal que − − −
Axioma 7.3 (VC2) — Axioma da continuidade absoluta – Para toda a reta
e todo o segmento ⊂ existem ∈ com − − − , tal que
| | =
Observemos o seguinte:
i) O axioma de continuidade relativa implica que se || 0 então existe um
segmento tal que | | 0 ( $ ). Esse segmento tem, segundo Veronese,
consta de um ponto e do seu próprio campo, que não intersecta os campos de nem
de , isto é, não pertence às classes Arquimedianas desses pontos.
ii) O axioma de continuidade absoluta reduz-se ao caso Arquimediano se | | =
0Nesse caso, o "corte" definido por equivale a um segmento degenerado a um
ponto Dedekindiano, portanto Hilbertiano. O referido no axioma VC2 depende
7.3
Modelo geral Hilbert-Veronesiano de GNSA
151
da escala fixada. Numa escala localizante como a da geometria Arquimediana é
forçosamente nulo.
iii) Veronese formula os seus axiomas de continuidade no quadro de uma álgebra
de segmentos onde os elementos são segmentos de diversos comprimentos. Ao fazermos a transição para ZFC utilizamos apenas pontos, o que não prejudica o raciocínio
de Veronese. Com efeito, na formulação dos axiomas, o papel determinante cabe ao
segmento do interior de , pouco relevando se e são pontos de segmentos
que limitam o intervalo variável que ele considera.
iv) Veronese demonstra a independência de V1 em relação a V2 e naturalmente
ambos são independentes da Geometria absoluta. O axioma da continuidade absoluta implica naturalmente a relativa: todo o segmento absolutamente contínuo
é relativamente contínuo, considerando uma escala na qual o segmento seja
considerado de comprimento nulo.
v) A relação da continuidade relativa com as escalas consideradas é a seguinte:
Seja o segmento considerado na formulação dos axiomas e seja a unidade da
reta considerada, definida por e , unidade em relação à qual se geram os campos
de e de . é em relação a , os campos de e de não se intersectam e
existe entre esses campos uma lacuna onde existe um ponto tal que: o seu campo
não intersecta o de nem o de ; todos os seus elementos estão entre e ; nada
se sabe sobre a unidade que gera o campo de . O segmento está contido nesse
campo.
vi) Os axiomas de continuidade de Veronese são axiomas Não-Arquimedianos
no sentido em que envolvem infinitamente pequenos atuais: segmentos e campos
Arquimediano. São portanto adequados à geometria a várias escalas.
vii) A formulação dos axiomas deu origem aos cortes de Veronese, popularizados
por Hahn, Holder e Kaplansky9 . São cortes Não-Arquimedianos e definem lacunas
relativamente grandes na reta.
7.3
7.3.1
Modelo geral Hilbert-Veronesiano de GNSA
Apresentação do modelo
Para a definição do modelo da geometria de Hilbert, é mais que suficiente a teoria
dos conjuntos, tal como axiomatizada por Zermelo e Fraenkel, ZFC. Porém, para o
modelo que se pretende, essa linguagem é insuficiente. De fato, não é possível formular os axiomas de continuidade de Veronese (formulados como acima, por exemplo)
na teoria ZFC. Falta um ingrediente que permite a formalização dos conceitos, o
predicado standard – que permite a formalização dos conceitos de , e outros,
encontra-se na extensão ZFNC de ZFC.
Coloquemo-nos então na teoria ZFNC de conjuntos internos. O modelo geral da
geometria que se pretende, consiste na adoção dos axiomas da Geometria Absoluta
9
Ver [30].
152
Modelo geral Hilbert-Veronesiano de GNSNA
de Hilbert, grupos I, II, III, considerando os mesmos conceitos primitivos e as mesmas definições, aos quais se adiciona o termo primitivo “standard”, governado pelos
mesmos axiomas que em IST, mais os axiomas de continuidade de Veronese, nas formas assumidas na secção anterior. O modelo será denominado Hilbert-Veronesiano
(H-V). Notando os seus quinze axiomas por HVi , eles constam da tabela de correspondências seguinte:
1 ↔ 1
6 ↔ 3
2 ↔ 2
7 ↔ 4
3 ↔ 3 8 ↔ 1
4 ↔ 1 9 ↔ 2
5 ↔ 2 10 ↔ 3
11 ↔ 4
12 ↔ 5
13 ↔ 6
14 ↔ 1
15 ↔ 2
Tem-se a
Definição 7.1 (modelo H-V de GNSNA) Um modelo H-V de Geometria é um
modelo de Geometria Neutra Não-Standard Não-Arquimediana com a seguinte forma:
M = ( ≡ )
onde , é um conjunto de pontos constituindo um plano; é um conjunto de
conjuntos de pontos de , chamados retas de modo que ( ) constitui um modelo dos axiomas de incidência (planares), isto é, os pontos e retas de satisfazem
a uma relação de incidência postulada nos axiomas 1 → 3 de Hilbert;
é uma relação “estar entre” em de tal modo que os elementos de ( )
cumprem os axiomas 4 → 7 de Hilbert; ≡ é uma relação de congruência
que satisfaz os axiomas 8 → 13; e uma bijeção entre cada reta de
e um conjunto transarquimediano de números. Essa bijeção existe em M em
presença dos axiomas de continuidade não Arquimediana 14 e 15.
7.3.2
Características do modelo
Por construção, o modelo de GNSNA apresentado acima, possui uma interpretação
em IST. Assim a consistência relativa do modelo depende da consistência de IST.
A independência dos axiomas de Hilbert foi demonstrada nos Grundlagen, como
se refere no capítulo 2. A independência do axioma de continuidade de Veronese dos
axiomas de Hilbert foi demonstrada, em primeiro lugar por Veronese nos Fondamenti
e, em segundo lugar, por Hilbert na obra citada, com a construção de geometrias
independentes de qualquer axioma de continuidade.
Resta estudar a consistência do modelo. Para tal, e seguindo a via da demonstração da consistência através da compatibilidade, as interpretações que se apresentam no próximo capítulo, são bastantes.
7.4
7.4
Conclusões
153
Conclusões
Neste capítulo construímos o modelo procurado, atingindo um dos principais objetivos da investigação. O modelo estabelecido é utilizado no resto do trabalho. Com
ele conseguimos uma conciliação histórica entre Hilbert e Veronese, e o estabelecimento da continuidade Não-Arquimediana na Geometria, em moldes Hilbertianos
e numa linguagem moderna de teoria de conjuntos, o IST. Nos próximos capítulos
vamos demonstrar a riqueza desta Geometria, já antevista para Veronese, tendolhe faltado instrumentos de lógica e de teoria de conjuntos que hoje temos a nossa
disposição.
154
Modelo geral Hilbert-Veronesiano de GNSNA
CAPÍTULO 8
Um modelo analítico
Hilbert-Veronesiano de GNSNA
8.1
Introdução
Tal como Hilbert procedeu para demonstrar a consistência da sua geometria, recorrendo a modelos analíticos, apresentamos neste capítulo uma Geometria Analítica,
que constitui uma interpretação do modelo H-V de GNSNA apresentado no capítulo
anterior. O caminho seguido é o de Hilbert, trilhado com o auxílio de linguagem e
notações ligeiramente mais modernas, mais adequadas aos propósitos em vista.
Para tal, iniciamos com uma secção (secção 8.2) sobre as relações entre a Geometria Absoluta, que vai ser a matriz do modelo pretendido, e a Geometria Analítica,
revendo a relação entre essa Geometria e a estrutura de corpo ordenado. A seguir
(secção 8.3), enriquecemos a Geometria com transformações no plano, e a definição
da estrutura vetorial do plano Cartesiano (secção 8.4). A secção seguinte (secção
8.5), é onde estuda o modelo como uma interpretação do modelo de Hilbert-Veronese,
e na secção 8.6 vemos algumas aplicações elementares.
8.2
Geometria Absoluta: geometria dos corpos
ordenados
Seguindo o caminho apontado por Hilbert (capítulo 2), nesta secção vamos partir
de um conjunto qualquer, munido da estrutura algébrica de corpo, e vamos verificar
que todos os corpos são modelos da Geometria de absoluta de Hilbert.
O sistema de axiomas de Hilbert para esta geometria é baseado em noções primitivas de “ponto”, “reta”, “plano”, “entre” e congruência, apenas sujeitos aos axiomas
de incidência, ordem e congruência, como nos capítulos 2 e 6 foi mostrado. O que
vamos fazer a seguir é dar novas interpretações a esses termos primitivos, e verificar
que os axiomas são verdadeiros nessas interpretações.
155
156
Um modelo analítico Hilbert-Veronesiano de GNSNA
8.2.1
A estrutura de corpo e a relação de incidência
Recordamos que um corpo é um conjunto munido de duas operações internas, +
e · que verificam os seguintes axiomas:
1) ( +) é um grupo comutativo, isto é, para ∈ tem-se
(i) ( + ) + = + ( + )
(ii) + = +
(iii) existe 0 ∈ tal que, ∀ ∈ 0 + = + 0 =
(iv) ∀ ∈ ∃(−) ∈ : + (−) = 0
2) (\{0} ·) é um grupo comutativo1 , isto é,
(i) ( · ) · = · ( · )
(ii) · = ·
(iii) existe 1 ∈ tal que,∀ ∈ 1 · = · 1 =
(iv) ∀ ∈ ∃−1 ∈ : · (−1 ) = 1
Tem-se então a
Definição 8.1 (plano Cartesiano, ponto) Chama-se plano Cartesiano sobre o
corpo , que notaremos ao conjunto 2 de pares de elementos de , chamados
pontos de
Definição 8.2 (recta) Uma reta de é um subconjunto de definido por:
= {( ) ∈ : + + = 0}
para ∈ e não simultaneamente nulos.
Exemplo 8.1 Seja 1 = ({0 1} + ·) onde + e · são operações módulo 2. é um
plano com 4 pontos e 6 retas:
Figura 16: Plano Cartesiano. Fonte: [45].
Definição 8.3 (declive de uma reta) Dada a reta definida pela equação +
+ = 0 6= 0 chama-se declive de ao número 3 = −
1
Utilizamos a linguagem anglo-saxónica, segundo a qual, não havendo mais explicitações, o
termo “corpo” significa “corpo comutativo”.[45]
8.2
Geometria Absoluta: geometria dos corpos ordenados
157
Teorema 8.1 (Descartes) Sejam dados os pontos 1 = (1 1 ) = ( )
no plano Cartesiano R incluindo os pontos (0 0) e (1 0). Então é possível construir
um ponto = ( ) com régua e compasso se e só se e podem ser obtidos a
partir de 1 1 através das operações do corpo R + − × ÷ e a solução
de um número finito de equações lineares e quadráticas, envolvendo raízes quadradas
de números reais positivos.¤
Este teorema foi demonstrado por R. Descartes no seu La Géométrie [19].
Teorema 8.2 (Hilbert) Sendo um corpo qualquer, o plano Cartesiano satisfaz os axiomas de incidência de Hilbert, I1,I2 e I3.
Dem. Para o caso de retas verticais a demonstração é imediata. Para o outro
caso, tem-se:
I1. Como as operações + − × e ÷ são sempre possíveis em , a equação que
define a reta que passa por dois pontos 1 (1 1 ) e 2 (2 2 )
− 1 =
2 − 1
( − 1 )
2 − 1
é sempre possível, e a sua solução é única.
I2. De fato, para o corpo minimal 1 = {0 1}, as seis retas possíveis têm todas
dois pontos. Para ⊃ 1 há, por maioria de razão, mais pontos em cada reta.
I3. No corpo 1 , as retas definidas pelos pontos (0 0) (0 1) e (1 0), não têm o
mesmo declive, logo, existem 3 pontos não colineares.¤
Proposição 8.1 (mudança de coordenadas) Sejam dadas no plano Cartesiano
duas retas ≡ 0 = + + e ≡ 0 = + + que se intersectam num
ponto . Então é possível fazer uma mudança linear de variáveis
½ 0
= + +
0 = + +
tal que os novos eixos coordenados são e , e os novos pontos unitários são os
pontos sobre eles, 6=
Dem. (Hilbert) Como a composição de mudanças lineares de variável é ainda
uma mudança linear de variáveis, faça-se, em primeiro lugar uma mudança da forma
½ 0
=−
0 = −
que deslocará a origem (0 0) para o ponto = ( ). A seguir uma transformação
da forma
½ 0
=
0 =
158
Um modelo analítico Hilbert-Veronesiano de GNSNA
deslocará os pontos unitários para outros quaisquer nesses mesmos eixos. Então
uma mudança da forma
½ 0
= −
0 =
manterá o eixo 0 invariante, mas substitui o eixo 0 por outra reta que passa pela
origem. O eixo 0 pode ser movido por meio de outra transformação semelhante,
trocando os papeis de e . Combinando todas estas hipóteses tem-se uma transformação que muda os eixos originais e os respetivos pontos unitários para outros
eixos e outras unidades desejados.¤
Definição 8.4 (paralelismo) Num plano duas retas e dizem-se paralelas
( k ) se = ou se ∩ = ∅
Proposição 8.2 No plano existe uma configuração de quatro pontos
tais que
k ; k ; k
se e só se tem característica 2.
Dem. Como todo o corpo de característica 2 inclui o subcorpo 1 do 8.1, a
existência está provada. Para a recíproca, suponhamos que num plano existe
uma configuração como a da hipótese. Então façamos uma mudança de linear coordenadas tal que passa a ser a nova origem, e e os pontos unitários. Então
←→
←→
será o ponto (1 1); será a reta = , e a reta + = 1 não têm nenhuma
solução comum. De fato, a resolução dá 2 = 1, que tem solução para 2 6= 0 Portanto a configuração existe quando e só quando 2 = 0, isto é a característica de
é 2.¤2
Teorema 8.3 (Papo-Pascal) Seja um corpo. No plano Cartesiano sejam
dadas as retas e os pontos ∈ e 0 0 0 ∈ tais que 0 k 0 e
0 k 0 Então também 0 k 0
Dem. (Para não paralela a ) Suponhamos que se intersectam num ponto
. Escolhamos coordenadas tais que é a origem, e 0 os pontos unitários.
Seja o ponto (0 ) e 0 o ponto ( 0). Então, escrevendo as equações das retas
envolvidas, tem-se que = (0 ) e 0 = ( 0). Como é comutativo, = ,
e a reta 0 tem declive −1, pelo que é paralela a 0 .¤
Nota 8.1 Na demonstração recorremos, de forma essencial, à comutatividade de .
O teorema de Papo-Pascal só é válido para corpos comutativos, como já tínhamos
observado no capítulo 2.
Teorema 8.4 (Desargues) Seja num plano Cartesiano os pontos e
0 0 0 tais que k 0 0 e k 0 0 então k 0 0
Dem. Vide Hilbert, Fundamentos da Geometria.¤
2
Reparemos que a configuração referida não é “planar” no sentido euclidiano, o que é claramente
denunciado pela característica de . Corpos com característica não nula denunciam propriedades
estranhas à (à intuição euclidiana) das geometrias correspondentes.
8.2
Geometria Absoluta: geometria dos corpos ordenados
8.2.2
159
A estrutura de corpo ordenado e a relação “situado
entre”
Comecemos por recordar alguns resultados em relação a corpos ordenados:
Definição 8.5 (corpo ordenado) Um corpo ordenado é um par ( ) onde
é um corpo e ∅ 6= ⊂ , dito o subconjunto dos elementos positivos de , tal
que
(i) ∈ ⇒ + ∈
(ii) Para todo ∈ tem-se uma e uma só das seguintes condições
∈ ;
= 0;
− ∈
Proposição 8.3 Seja ( ) um corpo ordenado. Então:
(a) 1 ∈
(b) tem característica nula
(c) O menor subcorpo de que inclui 1 é isomorfo ao corpo dos números
racionais, Q;
(d) ∀ ∈ \{0} 2 ∈
Dem. (a) Por definição de corpo, 1 6= 0 Assim tem-se 1 ∈ ou −1 ∈
(axioma () da definição 8.5). Se 1 ∈ não há nada a provar. Se −1 ∈ então
(−1)(−1) = 1 ∈ (ax. ()), o que contradiz ().
P Portanto 1 ∈
(b) Como 1 ∈ por () tem-se que = =1 ∈ qualquer que seja ∈ N
Logo 6= 0 pelo que tem característica nula.
(c) A aplicação natural
N → ; 7→
é injetiva por (b), e é extensível a uma aplicação injetiva Q → cuja imagem é:
(1) isomorfa a Q; e (2) o menor subcorpo de que inclui 1.
(d) Se 6= 0 então, ou ∈ ou − ∈ Se ∈ então 2 ∈ por (). Se
− ∈ então (−)(−) = 2 ∈ ¤
Definição 8.6 (ordem) Seja ( ) um corpo ordenado, ∈ . Define-se
⇔−∈
≤ ⇔−∈ ∨=
⇔ − ∈ ;
donde 0 ⇔ ∈
Proposição 8.4 Num corpo ordenado ( ) a relação “ ” verifica as seguintes
propriedades:
(i) Se , e ∈ então + + (compatibilidade com a adição)
160
Um modelo analítico Hilbert-Veronesiano de GNSNA
(ii) Se e então (transitividade)
(iii) Se e 0, então (compatibilidade com a multiplicação)
(iv) Dados ∈ tem lugar uma e uma só das seguintes condições:
;
= ;
(tricotomia).¤
Proposição 8.5 (Hilbert) Se é um corpo, e existe uma relação de “situado
entre” no plano Cartesiano que satisfaz os axiomas II1-II4 de Hilbert, então
é um corpo ordenável. Reciprocamente, se ( ) é um corpo ordenado, podese estabelecer em uma relação de “situado entre” tal que sejam satisfeitos os
axiomas II1-II4 de Hilbert.
Dem. Suponhamos, em primeiro lugar que é um corpo, e que existe uma
relação “situado entre” no plano que satisfaz os axiomas de Hilbert II1-II4.
Defina-se o conjunto de como o conjunto de todos os ∈ \{0} tais que
o ponto ( 0) do eixo 0 está no mesmo lado que 0 ou 1. Como a adição no
corpo corresponde a dispor segmentos consecutivamente no eixo dos 0 , é claro que
∈ ⇒ + ∈
Para a multiplicação, dados ∈ ponha-se a no eixo 0 1 no eixo 0
e desenhe-se a reta (0 1) a ( 0), e desenhe-se a reta paralela a esta e que passa
por (0 ). Esta intersectará o eixo 0 no ponto ( 0). Claramente, 1 ∈
(consequência de II1-II4), pelo que satisfaz a primeira definição de um corpo
ordenado. Por construção, é a união disjunta de t {0} t − é um corpo
ordenado.
Reciprocamente, suponha-se que ( ) é um corpo ordenado dado. Definase a relação “situado entre” para pontos duma reta, da seguinte maneira: sejam
= (1 2 ), = (1 2 ), = (1 2 ) três pontos distintos na reta = + .
Diz-se que está entre e , e nota-se (como anteriormente) − − se
ou 1 1 1 ou 1 1 1 . Se a reta for vertical, usam-se as segundas
coordenadas, da mesma forma. Tem-se então os axiomas II1-II-4:
II1. Consequência imediata da definição;
II2. Deriva do fato correspondente, verdadeiro em todos os corpos ordenados,
de que dado ∈ existem ∈ tais que . Com efeito,
pode-se sempre tomar, por exemplo, = − 1, = 12 ( + ) e = + 1. Note-se
que como tem característica nula, pela proposição 8.3, 12 ∈
II3. Deriva do fato de que num corpo ordenado , se são três elementos
distintos, então tem lugar uma e uma só das seguintes 6 = 3! condições :
;
;
;
;
;
8.2
Geometria Absoluta: geometria dos corpos ordenados
161
II4. Suponhamos que é dado um triângulo 4 e uma reta que intersecta o
lado . Supondo que ∈
tem-se que mostrar que também intersecta ou
ou , mas não ambos. Em primeiro lugar suponha-se que a reta é vertical,
com equação, digamos, = . Sejam ,as abcissas de respetivamente.
Por hipótese, ou ou . Por simetria, assuma-se que .
Então é claro que se , então cortará e não , como requerido. Se não
é vertical, faz-se uma mudança de coordenadas tal que se torne vertical, o que não
afeta a relação “situado entre” , pelo que se encontra de novo no caso anterior.¤
8.2.3
Relações de congruência
A seguir vamos definir a congruência para segmentos de reta e para ângulos. Vamos
assumir doravante que estamos num corpo ( ) tal que se tem a relação “estar
entre” definida como acima. Então tem-se a
Definição 8.7 (segmento de recta) Dada uma reta , um segmento de reta
é o conjunto de todos os pontos de que estão entre e , mais os pontos e ,
ditos extremos de :
= { } ∪ { : − − }
Como não está garantida a existência de raízes quadradas3 , vamos definir a noção
de distância entre dois pontos, da seguinte maneira:
Definição 8.8 (distância entre dois pontos) Num plano define-se a distância entre (1 2 ) e (1 2 ), como a função que satisfaz à igualdade
2 ( ) = (1 − 1 )2 + (2 − 2 )2
onde 2 (· ·) = (· ·) × (· ·)
Podemos então definir a noção de congruência:
Definição 8.9 (congruência de segmentos) Num plano dois segmentos
e são congruentes se
2 ( ) = 2 ( )
e nesse caso escreve-se
≡
Com vista à definição de congruência entre ângulos, temos as seguintes definições:
Definição 8.10 (semirreta) Uma semirreta é um subconjunto de uma reta determinado por um ponto e todos os pontos de que estão de um dos lados de .
Nesse caso diz-se que a semirreta tem origem em , ou que emana de .
3
Pois K pode não ser completo.
162
Um modelo analítico Hilbert-Veronesiano de GNSNA
Se é um ponto duma semirreta que emana de , nota-se essa semirreta, como
−→
anteriormente, por “”.
Definição 8.11 (ângulo) Um ângulo geométrico é a união de duas semirretas que
emanam do mesmo ponto e não estão ambas contidas na mesma reta.
Definição 8.12 (interior de um ângulo) O interior de um ângulo de lados 0
e 0 é o conjunto dos pontos do plano que estão do mesmo lado (definição6.3) de
que 0 e do mesmo lado de que 0 .
Definição 8.13 (ângulos reto, agudo, obtuso) Diz-se que um ângulo é reto se
os declives e 0 das retas a que pertencem os seus lados satisfazem
0 = −1
Um ângulo é agudo se estiver contido no interior de um ângulo reto.
Um ângulo diz-se obtuso se contiver um ângulo reto no seu interior.
Definição 8.14 (tangente de um ângulo) Seja o ângulo formado pelas semirretas e 0 , que pertencem a retas de declives e 0 respetivamente. Define-se
tangente de como sendo
¯
¯
¯ − 0 ¯
¯
¯
tan = ± ¯
1 + 0 ¯
onde se toma o sinal + se é agudo e o sinal − se é obtuso.
Note-se que tan só está definida para reto em ∪ {∞}.
Definição 8.15 (congruência de ângulos) No plano Cartesiano dois ângulos e são congruentes se
tan = tan
onde tan tan ∈ ∪ {∞} e nota-se ≡
Definição
8.16 (corpo Pitagórico) Um corpo é dito Pitagórico se ∀ ∈ ,
√
2
1 + ∈ .
Definição 8.17 (plano Pitagórico) Seja um corpo Pitagórico. Então é
dito um plano Cartesiano Pitagórico, ou simplesmente um plano pitagórico.
Proposição 8.6 Seja um corpo ordenado, e o plano Cartesiano correspondente. Então satisfaz os axiomas III2-III5. Para além disso, III1 é válido se e
somente se for um corpo pitagórico.
8.2
Geometria Absoluta: geometria dos corpos ordenados
163
Dem. A condição III2 é a transitividade da congruência de segmentos, o que
decorre imediatamente da definição usando a função 2 definida acima. O axioma
III3 é fácil de verificar. O axioma III4 é o axioma da transposição de ângulos.
Suponha-se portanto que é dado um ângulo e uma semirreta que emana de um
ponto , com declive 0 tal que
¯ 0
¯
¯ − ¯
¯
¯
tan = ± ¯
1 + 0 ¯
onde o sinal é afetado conforme for agudo ou obtuso. Tem-se equações lineares
em 0 . Tem-se
± tan
0 =
1 ∓ tan
Estas duas soluções dão ângulos em ambos os lados da reta dada que passa por
, de modo a se poder construir o novo ângulo 0 no lado desejado da reta.
III5 é a transitividade de congruência de ângulos, que é imediata a partir da
definição de congruência usando a função tangente.
Consideremos agora o axioma III1 sobre o traçado de segmentos. Não é verdadeiro num corpo arbitrário – por exemplo, no corpo Q não se pode traçar o
segmento
que une os pontos (0 0) e (1 1) no eixo 0 , porque o seu comprimento é
√
2∈
Q Sobre um corpo qualquer , ∈ consideremos o segmento definido por
(0 0) e ( 1). Então existirá um segmento congruente com esse, sobre o eixo 0
com origem em 0, se e só se existe ∈ tal que
2 ((0 0) ( 1)) = 2 ((0 0) ( 0))
isto é, 1 + 2 = 2 . Portanto é preciso que ∈ seja a raiz quadrada de 1 + 2 .
Ou, por outras palavras, deve ser pitagórico.
√
Reciprocamente, seja pitagórico, isto é, para todo ∈ 1 + 2 ∈ Então
para quaisquer ∈ 6= 0 tem-se
Ã
µ ¶2 !
2 + 2 = 2 1 +
Fazendo =
tem-se que
√
√
2 + 2 = || 1 + 2
pertence a . Daqui se conclui que para todo o par de pontos (1 2 ), (1 2 ) ∈
a distância entre e pertence a , pelo que, nesse caso, se pode definir a
função distância
p
( ) = (1 − 1 )2 + (2 − 2 )2
que é um elemento positivo de .
164
Um modelo analítico Hilbert-Veronesiano de GNSNA
Suponhamos agora que é dada uma reta = + e um ponto sobre ela.
Suponhamos que queremos traçar um segmento de comprimento . Pode-se escrever
= ( + ), e procurar um ponto = ( + ) na mesma reta tal que
( ) =
isto é
p
( − )2 + ( + − ( + ))2 = ⇔
√
| − | 1 + 2 =
√
Como é pitagórico, 1 + 2 ∈ pelo que a equação em é sempre possível,
tendo duas soluções, uma para cada direção.¤
8.2.4
Intersecções
Pretendemos agora estudar a a intersecção de retas e circunferências no plano Cartesiano. Comecemos pelas seguintes definições:
Definição 8.18 (corpo Euclidiano) é um corpo Euclidiano se
√
∀ ∈ 0 ⇒ ∈
Definição 8.19 (plano Euclidiano) Seja um corpo Euclidiano. Então é
dito um plano Cartesiano Euclidiano, ou simplesmente um plano Euclidiano.
Proposição 8.7 Seja um plano Cartesiano sobre um corpo ordenado . Então
as seguintes condições são equivalentes:
(i) Dadas duas circunferências C1 e C2 em , se C1 tem um ponto no interior de
C2 e C2 tem um ponto no exterior de C1 , então C1 e C2 intersectam-se (em exatamente
2 pontos);
(ii) Dada uma circunferência C e uma reta em e contém um ponto do
interior de C, então intersecta C (em exatamente 2 pontos).
(iii) é um corpo euclidiano
Dem. () ⇒ () Seja = 0 a equação de uma circunferência e = 0 a equação
de uma reta. Então + = 0 é outra circunferência, cujas intersecções com a
primeira circunferência são as mesmas que as da primeira circunferência com a reta.
Então () ⇒ ()
() ⇒ (). Agora vamos supor que se tem a propriedade de intersecção de retas
e circunferências e vamos provar que é Euclidiano. Com efeito, dado ∈ 0,
sejam os pontos = (0 0), = ( 0), e 0 = ( + 1 0). Seja Γ a circunferência
de centro em ( 12 ( + 1) 0) e raio 12 ( + 1) Consideremos a reta vertical que passa
pelo ponto . Evidentemente está no interior da circunferência, portanto, pela
propriedade de intersecção de retas e circunferências,
Γ num ponto
√ a reta intersecta
√
. Resolvendo as equações tem-se que = ( ) portanto ∈
8.2
Geometria Absoluta: geometria dos corpos ordenados
165
() ⇒ () Agora vamos supor a existência de raízes quadradas de elementos
positivos de e vai-se provar a propriedade de intersecção de circunferências. Se
Γ Γ0 são circunferências de as suas equações podem-se escrever
( − )2 + ( − )2 = 2
( − )2 + ( − )2 = 2
onde ( ) e ( ) são os centros e são os raios das circunferências dadas, e que
pertencem a por se tratar de um corpo Euclidiano. Como os coeficientes de 2 e
2 nas duas equações é 1, pode-se subtrair uma equação da outra para transformála numa equação linear. Resolvendo esta equação simultaneamente com uma das
quadráticas à escolha, usando apenas raízes quadradas, os pontos de intersecção
têm coordenadas em , pelo que pertencem ao plano Falta apenas provar que,
se Γ e Γ0 satisfazem a proposição de intersecção de circunferências, então as raízes
quadradas de que se necessita são raízes quadradas de elementos positivos de ,
que existem por ser Euclidiano.¤
Proposição 8.8 (Hilbert) Seja Ω o corpo de todos os números reais que
√ podem
ser expressos usando um número finito de operações + − × ÷ e 7→ 1 + 2
Então Ω é um corpo ordenado Pitagórico.
Dem. Sejam ∈ Ω Então podem ser expressos através de uma cadeia
finita de números racionais e as operações acima indicadas. O mesmo se aplica a
± ( 6= 0) Se √
∈ Ω pode ser expresso
pelas mesmas cadeias, e portanto
√
o mesmo acontece com 1 + 2 pelo que 1 + 2 ∈ Ω Portanto Ω é pitagórico, e é
um corpo ordenado por ser subcorpo de R: pode-se tomar como o conjunto dos
positivos de Ω o conjunto dos elementos de Ω que são positivos enquanto elementos
do corpo ordenado R.¤
Definição 8.20 (corpo de Hilbert) O corpo Ω caracterizado na proposição 8.8
chama-se corpo de Hilbert.
O corpo Ω de Hilbert é o menor corpo que verifica os axiomas de incidência,
ordem e congruência de Hilbert e o plano Ω a menor Geometria Absoluta plana.
Definição 8.21 (plano Hilbertiano) Sendo Ω o corpo de Hilbert, Ω é dito plano
Cartesiano Hilbertiano, ou simplesmente plano Hilbertiano.
Proposição 8.9 Seja K o conjunto de todos os números obtidos a partir dos números
racionais
√ através de um número finito de operações + − × ± e para 0,
7→ Então K é um corpo ordenado euclidiano.
Dem. Idêntica à de 8.8.¤
166
8.3
Um modelo analítico Hilbert-Veronesiano de GNSNA
Transformações no plano Cartesiano
Para completar a demonstração de que todos os axiomas de Hilbert são válidos
num plano Cartesiano sobre um corpo ordenado, vamos nesta secção mostrar que o
axioma III6 de Hilbert – o critério – é também válido em tais geometrias.
Por postular a existância de movimentos sem deformação (movimentos rígidos ou
isometrias), o referido axioma é necessário para garantir a homogeneidade do plano
Cartesiano.
Definição 8.22 (movimento rígido ou isometria) Se é uma geometria que
consiste de noções primitivas de ponto, reta, entre e congruência de segmentos e de
ângulos, que podem satisfazer ou não todos os axiomas de Hilbert, um movimento
rígido ou isometria em é uma aplicação : → tal que
(1) é uma aplicação bijetiva;
(2) transforma retas em retas;
(3) preserva a relação “entre” entre pontos da mesma reta;
(4) ∀ ∈ ≡ ()();
(5) ∀∠ ∈ ≡ ()
Isto é, é preserva a estrutura determinada pelas noções primitivas (termos e
relações) em
Em consequência imediata da definição tem-se a
Proposição 8.10 O conjunto dos movimentos rígidos de é um grupo (para a
operação de composição), e é notado por G (ou apenas G).
Dem. Se ∈ por definição, (()) = () ∈ A aplicação identidade
é um movimento rígido em Todos os movimentos são inversíveis.¤
Para se garantir a existência de movimentos rígidos, para além da identidade,
tem-se o
Axioma 8.1 (existência de movimentos rígidos ()) (1) Quaisquer que sejam os pontos 0 ∈ existe ∈ G tal que () = 0
(2) Quaisquer que sejam 0 ∈ 0 distintos de existe ∈ G tal que
−−→
−→
() = e transforma a semirreta na semirreta 0 .
(3) Para qualquer reta ∈ existe ∈ G tal que ( ) = ∀ ∈ e permuta
os lados de .
Proposição 8.11 Num plano que satisfaz os axiomas de incidência e ordem, e
ainda 2, 5 e as partes de existência de 1 e 4, () ⇒ 6 ()
Dem. Suponhamos verificado o axioma () e vai-se provar () através do
método de Euclides. Suponhamos portanto que são dados dois triângulos, ∆
e ∆0 0 0 e que ≡ 0 0 ≡ 0 0 e ∠ ≡ ∠ 0 0 0 Então é preciso
demonstrar que ≡ 0 0 e que os ângulos em são congruentes com os
8.3
Transformações no plano Cartesiano
167
ângulos em 0 , 0 , respetivamente. Por ()(1), existe um tal que () =
0 Seja 00 = () Então ≡ 0 00 já que é um e ≡ 0 0 por
hipótese, portanto 0 0 ≡ 0 00 por III2.
Por outro lado, por (), existe um que deixa 0 invariante e tal que
−−→
−−−→
(0 00 ) = 0 0
Como 0 00 ≡ 0 0 , e preserva congruências, conclui-se da parte de unicidade de
III1 que ( 00 ) = 0 Seja 00 = () Então considere-se a reta = 0 0 e as
−−→ −−−→
duas semirretas 0 0 e 0 00 Se estão do mesmo lado de , não há nada a fazer; mas
se estão em lados opostos, então por () (3) existe um movimento rígido que
deixa os pontos de fixos e permuta os lados. Note-se com ∈ a composição
ou com se se usar Então tem as seguintes propriedades:
() = 0 ;
() = 0 ;
() = 000
estando 000 no mesmo lado de 0 0 que 0 Como é um movimento rígido
∠ ≡ ∠ 0 0 00
Mas também, por hipótese ∠ ≡ ∠ 0 0 0 portanto, por III5,
∠ 0 0 0 ≡ ∠ 0 0 00
Ademais, 0 e 000 estão no mesmo lado de 0 0 Portanto, pela unicidade em III4,
−−−→ −−−→
conclui-se que as semirretas 0 00 e 0 000 são iguais. Como por hipótese 0 0 ≡
e ≡ 0 0 como é um movimento rígido, então, por II2 tem-se que 0 0 ≡
0 000 Ademais 0 e 000 estão no mesmo lado de 0 Portanto, pela unicidade em
III1, conclui-se que 0 = 000 Portanto () = 0 e () = 0 Como é um
movimento rígido, ≡ 0 0 como se pretendia. Da mesma maneira, para os
ângulos, (∠) = ∠0 0 0 Portanto, sendo um movimento rígido, conclui-se
que
∠ ≡ ∠0 0 0
O mesmo método mostra que
∠ ≡ ∠0 0 0
o que acaba a demonstração.¤
Proposição 8.12 Seja um corpo Pitagórico, e seja o plano Cartesiano associado. Então verifica ()
Dem. Consideremos que tem coordenadas ( ). Vamos considerar certas
transformações de definidas por funções de e , e vamos mostrar que se trata
de movimentos rígidos, e a seguir vamos chegar à conclusão que existem em número
168
Um modelo analítico Hilbert-Veronesiano de GNSNA
suficiente para provar (). Em primeiro lugar, consideremos um ponto = ( )
e a translação dada por
½ 0
=+
0 = +
Claramente, é uma aplicação bijetiva, possuindo portanto aplicação inversa
½
= 0 −
= 0 −
Uma reta = + é transformada na equação
0 − = (0 − ) +
Em particular, a sua imagem é uma reta, pelo que transforma retas em retas. A
seguir, note-se que o declive da nova reta é o mesmo que o da velha, pelo que
preserva ângulos. É evidente que conserva a relação “estar entre”, porque esta
relação se reduz a questões de desigualdades no corpo , o que não se altera por
adição de constantes.
Finalmente é necessário verificar que preserva a função 2 . Mas isso é óbvio, visto que adiciona-se a mesma constante às coordenadas dos pontos , pelo
que no cálculo de 2 obtém-se o mesmo valor. Portanto a aplicação é um movimento rígido. Dados dois pontos pode-se tomar como a diferença das suas
coordenadas e , portanto () = e fica satisfeita a condição (1) de ().
Para provar a condição (2) de () vamos considerar rotações. Uma rotação
do plano é uma transformação definida pelo sistema
½ 0
= −
0 = +
onde ∈ e 2 + 2 = 1. A transformação inversa é dada por
½
= 0 + 0
= −0 + 0
Portanto, é uma aplicação bijetiva. Sendo linear, transforma retas em retas, e
um breve cálculo mostra que uma reta com declive é transformada numa nova
reta com declive
+
0 =
−
Como as transformações lineares preservam ou invertem desigualdades, preserva
a relação “situado entre”.
Mostramos, a seguir que preserva ângulos. Dadas duas retas de declives 1 e
2 , sejam 01 e 02 os novos declives. Como a congruência de ângulos é determinada
pelas suas tangentes, será suficiente mostrar que
01 − 02
1 − 2
=
0
0
1 + 1 2
1 + 1 2
8.3
Transformações no plano Cartesiano
169
Finalmente , vamos ver o que é que acontece com a função distância. Sejam
e dois pontos. Então, um cálculo elementar mostra que
(() ()) = ( )
Portanto é um .
Podemos agora verificar a condição (2) de (). Dados três pontos 0
−→
é preciso mostrar que existe um que deixa fixo e transforma a semirreta
−−→
na semirreta 0 . Usando uma translação, pode-se converter ao caso = origem.
Sejam = e 0 = 0 as retas que contém e 0 . Toda a rotação deixa
fixo, pelo que para transformar a primeira reta na segunda, só temos que encontrar
∈ , com 2 + 2 = 1 tais que
0 =
+
−
de acordo com a fórmula acima. Resolvendo em ordem a tem-se
0 −
=
1 + 0
Seja
=
0 −
1 + 0
1
Então pode-se resolver = e 2 + 2 = 1 para = ± √1+
2 usando a propriedade
pitagórica de . Portanto tem-se duas rotações que enviam a primeira reta na
segunda, diferindo pela rotação 0 = −, 0 = −. Uma destas rotações enviará a
−−→
−→
semirreta na semirreta 0 como se queria.
Para completar a demonstração de (), falta verificar a condição (3), segundo
a qual para toda a reta , existe um (dito reflexão) que deixa fixo ponto por
ponto, e que troca os dois lados de . Usando uma translação de um ponto de à
origem , pode-se assumir que ∈ Seja qualquer outro ponto de , e seja
−→
uma rotação que envia o eixo positivo na semirreta . Seja a reflexão no eixo
0 definida por
½ 0
=
0 = −
Claramente trata-se de um que deixa o eixo 0 invariante ponto por ponto e
troca os dois lados. Portanto = −1 é a reflexão procurada na reta .¤
Proposição 8.13 Se é um corpo pitagórico qualquer, então o plano Cartesiano
sobre é um plano de Hilbert que satisfaz o axioma das paralelas de Hilbert, .
Dem. Na proposição 8.2 tinha-se verificado que os axiomas de incidência I1I3, na 8.5 os axiomas de ordem II1-II4 e na 8.6 os axiomas de congruência. Na
proposição anterior, provou-se que () é válida em pelo que, III6 é também
170
Um modelo analítico Hilbert-Veronesiano de GNSNA
válida. Para que o plano seja euclideano, é necessário e suficiente que o corpo
seja euclidiano.¤
Pode-se agora demonstrar que num plano euclidiano existem movimentos rígidos
“em número suficiente” para garantir a congruência de segmentos e ângulos através
do método Euclidiano de sobreposição.
Proposição 8.14 Num plano de Hilbert qualquer é válido o axioma ().
Dem. Em primeiro lugar vamos mostrar a existência de simetrias axiais (reflexões), e outros movimentos rígidos serão feitos a partir destes.
Seja dada uma reta . Vamos construir um movimento rígido movimento rígido
chamado simetria de eixo ou reflexão em , que deixa os pontos de invariantes
e troca os dois lados de . Para qualquer ponto ∈ define-se ( ) = e para
←−→
pontos ∈
traça-se a perpendicular 0 a , e faz-se a sua extensão até ao outro
←−→ ←−→
lado de , tal que 0 ≡ 0 0 Então põe-se () = 0 Claramente 2 = pelo
que é uma aplicação bijetiva.
Sejam dois pontos quaisquer não em . Vamos agora mostrar que ≡
0 0 onde 0 = () e 0 = () Se e pertencem à mesma reta perpendicular a , é imediato, subtraindo os segmentos congruentes. Se estão em
perpendiculares diferentes, sejam 0 0 os pés dessas perpendiculares. Então usando os ângulos retos em 0 , pelo critério
∆0 0 ≡ ∆0 0 0
Portanto,
∠0 0 ≡ ∠0 0 0
Subtraindo a partir dos ângulos retos em 0 , tem-se que
∠0 ≡ ∠0 0 0
Por outro lado, 0 ≡ 0 0 a partir dos primeiros triângulos. Pode-se agora aplicar
de novo para concluir que
∆0 ≡ ∆0 0 0
Em particular tem-se
≡ 0 0
Suponhamos agora que , são três pontos não colineares cujas imagens por
são respetivamente 0 0 0 . Então por conclui-se que
∆ ≡ ∆0 0 0
e, em particular,
∠ ≡ ∠ 0 0 0
8.4
Estrutura vetorial do plano Cartesiano
171
Portanto preserva ângulos. Daqui se conclui facilmente que preserva retas e a
relação “estar entre” , pelo que de fato é um movimento rígido.
Para verificar que () é válido, estabelecemos a propriedade (3) para a existência de simetrias axiais. Sendo 0 dois pontos , seja a perpendicular da
mediatriz do segmento 0 . Então enviará em 0 . Portanto a condição (1) de
() é verificada. Para a condição (2), sejam 0 três pontos. Seja a bissetriz
−−→
−→
do ângulo ∠0 Então a simetria enviará a semirreta na semirreta 0 e
deixará invariante. Portanto () é verificado, como se queria demonstrar.¤
Corolário 8.1 Em presença de todos os axiomas dum plano Hilbertiano, à exceção
de III6, o axioma III6 é equivalente a ().
Dem. Basta combinar a proposição anterior com a proposição 8.11.¤
8.4
Estrutura vetorial do plano Cartesiano
Vejamos-se agora algumas noções relacionadas com a estrutura de espaço vetorial
de
Definição 8.23 (produto por um escalar) Num plano Cartesiano define-se
o seguinte produto entre (1 2 ) e um escalar ∈ :
= = (1 2 )
Proposição 8.15 Seja um plano, dotado das operações de adição de pontos e
multiplicação de um ponto por ∈ Então
(i) ( +) é um grupo abeliano
(ii) é um espaço vetorial sobre ¤
Pode-se também definir em um produto interno (canónico). Nesse caso temse
Definição 8.24 (produto interno canónico) Num plano Cartesiano definese o seguinte produto entre (1 2 ) e (1 2 ):
· = 1 1 + 2 2
Proposição 8.16 ⊥ ⇔ · = 0¤
Definição 8.25 (produto externo) Num plano Cartesiano define-se o seguinte
produto entre (1 2 ) e (1 2 ) chamado produto externo:
× = 1 2 − 1 2
Tem demonstração imediata a seguinte
172
Um modelo analítico Hilbert-Veronesiano de GNSNA
Proposição 8.17 O produto externo × é a área orientada definida por e
e tem-se
i) × = − ×
ii) · = ·
iii) × = 0
iv) · ( × ) = 0
v) · ( + ) = · + ·
vi) · = ( · )
vii) × = ( × )
onde ∈ e ∈ ¤
8.5
Plano Cartesiano Hilbertiano Não-Arquimediano
Nesta secção vamos, em primeiro lugar, ver a relação entre a continuidade no corpo
base e a continuidade no plano da geometria. Em segundo lugar, vai-se, aplicando os
axiomas Veronesianos de continuidade, desenvolver a geometria analítica num plano
Cartesiano Hilbertiano, como um modelo H-V de GNSA.
8.5.1
Relação entre a estrutura transarquimediana do corpo
base e a da Geometria
Proposição 8.18 Seja ( ) um corpo ordenado. O plano Cartesiano satisfaz o axioma IV1 ou o axioma IV2 se e só se o corpo satisfaz as propriedades
correspondentes para corpos, nomeadamente:
(A) (axioma de Arquimedes para corpos): ∀ 0 ∃ ∈ N( )
(D) (axioma de Dedekind para corpos): Suponhamos que = t e para todo
o ∈ e ∈ se tem . Então existe um único ∈ tal que para todo o
∈ e todo o ∈ se tem ≤ ou ≤
Dem. Para IV1, pode-se escolher coordenadas tais que o primeiro segmento
seja o segmento unitário. Se e pertencentes à reta correspondem a elementos
∈ então cópias de excederão se e só se − .
Para IV2, escolham-se coordenadas tal que a reta em questão seja o eixo 0 , e
identifiquem-se os seus pontos com os elementos de . Então as proposições são as
mesmas.¤
Proposição 8.19 Seja um corpo ordenado que satisfaz o axioma (A) de Arquimedes. Então existe um isomorfismo de ordem entre e um subcorpo de R. No
caso em que, para além disso, satisfaz o axioma (D) de Dedekind, esse subcorpo
é igual a R.
Dem. Já vimos que contém um subcorpo 0 isomorfo a Q. Isso fornece um
único isomorfismo
0 : 0 → Q ⊂ R
8.5
Plano Cartesiano Hilbertiano Não-Arquimediano
173
Vamos extender 0 a um isomorfismo de em R. Seja ∈ Em virtude do
axioma de Arquimedes, existem em inteiros maiores e menores que Portanto,
1
seja 0 o único inteiro tal que ≤ ≤ + 1 A seguir defina-se 1 ∈ 10
Z como o
1
1
único décimo de inteiro tal que 1 ≤ 1 + 10 Similarmente, defina-se 2 ∈ 100
Z
1
tal que 2 ≤ 2 + 100 Continuando o processo obtém-se a sequência
0 ≤ 1 ≤ 2 ≤
de números racionais com a propriedade
∀ ∈ N ≤ + 10−
No caso do corpo dos números reais R, estas convergem para um número real, notado
() Fica definida uma aplicação
: → R
É fácil ver que
( + ) = () + ()
e que
() = ()()
Portanto é um isomorfismo de corpos, que é necessariamente um isomorfismo sobre
a sua imagem. Vê-se também que
⇒ () ()
pelo que é um isomorfismo de ordem de sobre () ⊂ R
Assim a condição (D) em é equivalente à condição (D) em () já que esses
dois corpos são ordenadamente isomorfos. Todo o número real é caracterizado
pelos conjuntos
Σ1 = { ∈ R : ≤ }
e
Σ2 = { ∈ R : }
portanto, claramente (D) é verificado em () se e só se () = R¤
Deste resultado tem-se que todo o subcorpo de R torna-se num corpo ordenado
se se tomar para ⊂ os elementos de R+4 .
Doravante vamos considerar sempre a existência de um isomorfismo entre um
corpo ordenado (arquimediano ou não) e cada uma das retas de
A próxima definição introduz ordens de grandeza nos corpos Não-Arquimedianos:
Definição 8.26 (elementos , , , ) Seja um corpo ordenado Não-Arquimediano. Dizemos que um elemento ∈ é
(i) Limitado () se existe ∈ N tal que − ;
(ii) Infinito () se não existe ∈ N tal que − ;
(iii) Infinitésimo () se para todo o ∈ N − 1 1 ;
(iv) Apreciável ()se não for nem
4
O estudo de corpos ordenados arquimedianos é equivalente ao estudo de subcorpos de R.
174
Um modelo analítico Hilbert-Veronesiano de GNSNA
8.5.2
Geometria Não-Arquimediana
Sendo um corpo Não-Arquimediano, através do isomorfismo : 2 → as
ordens de grandeza de são transferidas para Assim para (1 2 ) ∈ 1
e 2 podem ter quaisquer ordens de grandeza, o que se reflete na estrutura métrica
de Tem-se a
Definição 8.27 (módulo de um ponto) Seja = ( ) um corpo ordenado
Não-Arquimediano e o plano Cartesiano correspondente. Chama-se módulo ou
norma de (1 2 ) ∈ ao número || ∈ 0+ = ∪ {0} que verifica a condição
||2 = 2 ( ) = 2 ((1 2 ) (0 0))
isto é,
||2 = 21 + 22
No que se segue vai-se continuar a utilizar a terminologia “ponto” em vez de
“ponto-vetor” ou de “vetor”
Definição 8.28 (ordens de grandeza no plano cartesiano) Seja um corpo
Não-Arquimediano e o plano Cartesiano correspondente. Um ponto ∈
diz-se
(i) se || é
(ii) se || é
(iii) se || é
(iv) se || é .
As propriedades reunidas na proposição seguinte, são evidentes:
Proposição 8.20 (1 2 ) ∈ é:
i) se 1 2 são ;
ii) se 1 = ∨ 2 =
iii) se 1 2 não são simultaneamente nem nenhum deles é .
iv) se 1 2 não são simultaneamente nem simultaneamente .¤
Tem-se que
Proposição 8.21 A aplicação |·| : → 0+ em goza das seguintes propriedades:
(i) || = 0 ⇔ = (0 0)
(ii) | − | ≤ max{|| ||} ∀ ∈ ¤
Isto é, || é uma ultramétrica em .
8.5
Plano Cartesiano Hilbertiano Não-Arquimediano
175
Nota 8.2 A condição (ii) implica a desigualdade triangular usual
| − | ≤ || + ||
o que significa que (i) é uma desigualdade mais forte. Na realidade tem-se
| − | ≤ max{|| ||} ≤ || + ||
Proposição 8.22 Para todo os elementos ∈ com uma ultramétrica |·|
tem-se
(a) |−| = ||
(b) | + | ≤ max{|| ||}
(c) | + | = max{|| ||} se || 6= ||
Dem. Por 8.21 () tem-se |−| ≤ max{|| ||} portanto, |−| ≤ || Do
mesmo modo tem-se || ≤ |−| Portanto tem-se a). Por a) e | − (−)| ≤
max{|| |−|} tem-se b). Para demonstrar c) podemos supor || || Aplicando
b) tem-se || ≤ max{| + | ||} ≤ max{|| ||} Como, por hipótese, ||
|| tem-se max{|| ||} = || Portanto, || = max{| + | ||} De || ||
deduzimos || = | + | pelo que se tem c).¤
Por indução, a partir de c) tem-se a
Proposição 8.23 (princípio de dominância) Seja ∈ = 1 , tal que
|1 | | | para todo o 1. Então
¯
¯
¯X ¯
¯
¯
¯ = |1 |
¯
¯ =1 ¯
¤
Como consequência imediata tem-se o
P
Corolário 8.2 Se =1 = 0 ∈ ≥ 2 então existem dois índices e ,
com 1 ≤ ≤ tais que
| | = | | = max {| |}
1≤≤
¤
Proposição 8.24 Seja |·| uma ultramétrica em ( ) . Seja |·|0 : ( ) → ∪ {0}
uma aplicação tal que
i) ||0 = 0
ii) || ≤ || ⇒ ||0 ≤ ||0 ∀ ∈ .
Então |·|0 é uma ultramétrica.
176
Um modelo analítico Hilbert-Veronesiano de GNSNA
Dem. Temos que provar que | − | ≤ max{||0 ||0 } para todo o pertencentes a . Se || ≤ || deduz-se de | − | ≤ max{|| ||} = || que
| − |0 ≤ ||0 ≤ max{||0 ||0 } Se || ≤ || procede-se exatamente da mesma
maneira.¤
Considerando a estrutura de grupo abeliano de têm-se alguns resultados:
Definição 8.29 Para todo ∈ ∪ {0} definem-se os seguintes subconjuntos de
, por
◦ () = { ∈ : || ≤ }
· () = { ∈ : || }
Proposição 8.25 ◦ () e · () são subgrupos de ¤
Note-se que ◦ () ⊂ · (); portanto, para ∈ os grupos residuais ˜ () =
estão bem definidos.
Recordemos a
◦ ()\ · ()
Definição 8.30 (núcleo de |·|) O conjunto definido por ker |·| := { ∈ :
|| = 0} é chamado o núcleo de |·|
É evidente a
Proposição 8.26 ker |·| =
Em particular tem-se
T
◦
∈ () =
T
∈
· ()¤
Corolário 8.3 ker |·| é um subgrupo de ¤
8.5.3
Topologia do plano Cartesiano Hilbertiano Não-Arquimediano
Definição 8.31 (plano Cartesiano semi-normado, normado) Seja um plano
Não-Arquimediano e |·| : → ∪{0} uma ultramétrica. O par ( |·|) é um plano
Cartesiano semi-normado.
O par ( |·|) é um plano Cartesiano normado se for ker |·| = {0}
Definição 8.32 (distância entre dois pontos) Seja um plano Cartesiano seminormado. Define-se em a distância
( ) := | − |
∈
fica munido duma topologia pseudométrica, e transforma-se num grupo topológico,
isto é, a operação ( ) 7→ − é contínua no grupo.
Observemos que, olhando para a estrutura topológica de o grupo admite
uma base de vizinhanças contável em = (0 0), que consiste em subgrupos de .
É sabido que, reciprocamente, todo o grupo topológico abeliano com um tal sistema
fundamental de vizinhanças em possui uma ultramétrica que define a topologia.
8.5
Plano Cartesiano Hilbertiano Não-Arquimediano
177
Proposição 8.27 A aplicação |·| : → ∪ {0} é contínua.
Dem. Pretendemos demonstrar que
||| − ||| ≤ | − | ∀ ∈
De fato tem-se || = ||, quando | − | max{|| ||} O subgrupo ker |·| é
fechado em .¤
Demonstra-se facilmente a seguinte
Proposição 8.28 é um espaço de Hausdorff se e só se for um grupo normado.¤
A seguir indicamos alguns resultados que ajudam a diferenciar as topologias
ultramétricas em espaços Cartesianos Não-Arquimedianos e as topologias familiares
nos espaços Euclidianos Arquimedianos.
Em virtude da desigualdade 8.21() da definição de ultramétrica, resulta que a
métrica é uma ultradistância, e satisfaz ao seguinte axioma adicional
( ) ≤ max{( ) ( )} ∀ ∈
Geometricamente este axioma tem o seguinte significado:
Proposição 8.29 Em todo o triângulo de um dos lados é no máximo igual ao
maior dos outros dois, isto é, todos os triângulos em são isósceles.¤
Definição 8.33 (− proximidade) Seja ∈ . Dois pontos ∈ dizem-se
-próximos se ( ) ≤ e nota-se ∼
É claro que
∼ ⇔ − ∈ · ()
A relação ∼ é claramente uma relação de equivalência em .
Sejam, como usualmente,
Definição 8.34 (bola de centro e raio ) + ( ) := { ∈ : | − | ≤
} é a bola de centro em ∈ e raio ∈ com a circunferência fronteira;
− ( ) := { ∈ : | − | } é a bola de centro em ∈ e raio
∈ , sem a circunferência fronteira.
Tem-se que − ( ) é exatamente a classe de equivalência de ∼ que contém ,
donde resulta que
− (0 ) = − ( ) ∀0 ∈ − ( )
Analogamente
+ (0 ) = + ( ) ∀0 ∈ + ( )
o que leva a que
178
Um modelo analítico Hilbert-Veronesiano de GNSNA
Proposição 8.30 Todo o ponto de uma bola é centro dessa bola.¤
Em particular, resulta que
Corolário 8.4 Todas as bolas são abertas em .¤
Em consequência tem-se a seguinte propriedade:
Proposição 8.31 Dadas duas bolas 1 2 ⊂ tem-se 1 ∩ 2 = ∅ ou 1 ⊂
2 (1 ∩ 2 ) = 1 isto é, em duas bolas ou são disjuntas ou está uma contida
na outra.
Dem. Com efeito, se ∈ 1 ∩ 2 pode-se encarar como um centro comum
das duas bolas. Então tem-se necessariamente uma contida na outra. Noutro caso
tem-se 1 ∩ 2 = ∅¤
Proposição 8.32 Seja ( ) := { ∈ : | − | = } a esfera de centro em
∈ e raio ∈ , que é fechada em , por definição. Se ∈
esta esfera é
vazia. Tem-se que
− ( ) ⊂ ( ) ∀ ∈ ( )
Dem. Seja ∈ − ( ) Então | − | | − | = Então a proposição
,8.22() implica
| − | = |( − ) + ( − )| = max{| − | | − |} =
isto é, ∈ ( )¤
Em particular tem-se:
Corolário 8.5 Toda a esfera em é aberta.¤
E como − ( ) = + ( ) − ( ) e como + ( ) é fechada, vê-se que
Corolário 8.6 Toda a bola em é fechada.¤
Nota 8.3 Esta última afirmação também é consequência do fato de, num grupo
topológico, os subgrupos abertos serem também fechados.
Tem-se ainda a
Proposição 8.33 Um plano Cartesiano normado é totalmente desconexo (para
a topologia ultramétrica).
Dem. De fato para todo ∈ a componente conexa de {} está contida em
todo a vizinhança aberta de {}. Pelas observações anteriores, as bolas − ( )
são tais vizinhanças. Assim = {} logo um conjunto totalmente desconexo.¤
8.6
Novas noções
179
Definição 8.35 (pontos infinitamente próximos) Seja um corpo Não-Arquimediano e o plano Cartesiano correspondente, ∈ . e dizem-se
infinitamente próximos (e nota-se ≈ ) se
( ) =
Definição 8.36 (segmento de reta) Dados dois pontos ∈ o segmento
de reta definido por eles é = −
Definição 8.37 (comprimento de um segmento de reta) Dado um segmento
de reta o seu comprimento é || = | − | = ( )
Vamos agora definir ordens de grandeza no plano Cartesiano Hilbertiano NãoArquimediano e na secção seguinte coligir algumas consequências:
Definição 8.38 (segmento de recta , , e .) Um segmento de reta
é , , ou se o seu comprimento for , , ou , respetivamente.
8.6
Novas noções
Definição 8.39 (quase-paralelismo) Num plano Cartesiano Hilbertiano Não-Arquimediano duas retas com declives e 0 respetivamente, dizem-se quaseparalelas, se ≈ 0 e nesse caso escreve-se
k
onde = | − 0 | é um .
Nota 8.4 A notação k será usada também para designar o quase-paralelismo, mesmo
quando não há necessidade de se especificar o .
De notar que pode ser ∩ 6= ∅ ( ∦ ) e mesmo assim ser k
É evidente que o paralelismo é um caso particular de quase-paralelismo pois
trata-se do caso em que = 0:
k ⇒ k
Também é evidente a
Proposição 8.34 Para um genérico, a relação k em é de equivalência.
Dem. Consequência imediata das propriedades de ≈ ¤
Abaixo introduzimos noções relativas ao quase-paralelismo no plano:
180
Um modelo analítico Hilbert-Veronesiano de GNSNA
Definição 8.40 (vizinhança tubular infinitesimal de uma reta) Dado um plano
Cartesiano Hilbertiano Não-Arquimediano e uma reta ∈ chama-se vizinhança tubular infinitesimal de raio de , ou −túbulo de , ao conjunto dos pontos
∈ tais que
( ) ≤
com um de . Nota-se
De forma idêntica se define vizinhança tubular de uma figura geométrica qualquer:
Definição 8.41 (vizinhança tubular de uma figura) Dada um subconjunto
de (figura), chama-se vizinhança tubular ou túbulo de , de raio (= ) ao
conjunto
= { ∈ : ( ) ≤ }
Sendo um de , e retas de tem-se as seguintes proposições evidentes:
Proposição 8.35
∈ ⇒ k
¤
Proposição 8.36 Se k então,
∀ ∈ ∈ k
com ips.¤
Corolário 8.7 Se k então,
∀ ∈ k
onde é uma reta de .¤
Estes resultados motivam as seguintes definições:
Definição 8.42 (túbulos quase-paralelos, paralelos) Se k então diz-se que
k ips.
Corolário 8.8 Em particular, se k então tem-se k
Proposição 8.37 Duas retas são quase-paralelas se e só se pertencerem a túbulos
quase-paralelos (em sentido lato).
Definição 8.43 (reta quase paralela a um túbulo) Diz-se que k se existe ∈ tal que k ( um de uma reta de ).
8.6
Novas noções
181
Tem-se também a
Proposição 8.38 Se , são , então k ⇔ ( × ) ≈ 0
Dem. Sejam (1 2 ), (1 2 ), (1 2 ) e (1 2 ). Tem-se que
¤
2 − 2
2 − 2
≈
⇔
1 − 1
1 − 1
⇔ (2 − 2 )(1 − 1 ) − (2 − 2 )(1 − 1 ) ≈ 0 ⇔ × ≈ 0
k
⇔
Nota 8.5 Num plano Hilbertiano Não-Arquimediano seja dada uma reta e
3
i) Por um ponto exterior a , tal que 0 ( ) ≤ passa uma única reta
paralela a (isto é, localmente é Euclidiano).
ii) Por um ponto exterior a , passa uma infinidade de retas quase-paralelas
(no sentido estrito de paralelismo) a .
Definição 8.44 (quase-colinearidade) Num plano Hilbertiano Não-Arquimediano
três pontos são quase-colineares se
k
Nota 8.6 i) A colinearidade é um caso particular da quase-colinearidade;
ii) Se k ∩ 6= ∅ então existem pontos ∈ e ∈ tais que , ,
são quase colineares. Em particular pode ser = ∩
Tem-se a seguinte
Proposição 8.39 Se ||, || 6= e ∈ então , , são quasecolineares.¤
Definição 8.45 (quase-perpendicularidade) Num plano Hilbertiano Não-Arquimediano duas retas com declives e 0 respetivamente são quase-perpendiculares
se ≈ − 10 e nesse caso escreve-se
⊥
Para segmentos, e em termos de produto interno, tem-se:
Proposição 8.40 ⊥ ⇔ · ≈ 0
Dem. Sejam (1 2 ), (1 2 ), (1 2 ) e (1 2 ). Tem-se
2 − 2
2 − 2
≈−
⇔
1 − 1
1 − 1
⇔ (2 − 2 )(2 − 2 ) + (1 − 1 )(1 − 1 ) ≈ 0 ⇔ · ≈ 0
⊥
¤
⇔
182
Um modelo analítico Hilbert-Veronesiano de GNSNA
Nota 8.7 Note-se que como × não é necessariamente quando 2 ( ) =
e 2 ( ) = , não se tem que são colineares se e só se ∆ ≈ 0
onde ∆ representa a área do triângulo ∆ (ver proposição 8.6 abaixo)
Definição 8.46 (túbulos perpendiculares) ⊥ ⇔ ⊥
São evidentes as seguintes proposições:
Proposição 8.41 Se ⊥ então ⊥ ∀ ∈ sendo uma reta de .¤
Proposição 8.42 ∈ ∧ ∈ ⇔ ⊥ sendo uma reta de ¤
Definição 8.47 (ângulo ) Num plano Hilbertiano Não-Arquimediano um
ângulo diz-se se
|tan | =
Dada a definição de tangente de um ângulo
¯ 0
¯
¯ − ¯
¯
tan = ± ¯¯
1 + 0 ¯
resulta que o ângulo entre duas retas de declives e 0 respetivamente, é se
0 ≈
Note-se que tan não está definida para reto. Mas no caso um dos lados de
ser vertical ( = ∞ ∈
) pode-se ainda usar a fórmula. Tem-se, por exemplo
∞−
1
≈
1 + ∞
onde ∞ é o dos na notação de Van den Berg.
É evidente a
Proposição 8.43 Se é um ângulo, uma reta e ⊂ então é ip.
Dem. Com efeito os lados são -próximos pelo que os seus declives são infinitamente próximos.¤
Tem-se facilmente os seguintes resultados clássicos:
Proposição 8.44 Se é , então
(i) sin ≈
(ii) cos
¯ ≈ 1 ¯
(iii) ¯tan( 2 + )¯ =
8.6
Novas noções
183
Dem. Com efeito, como é , tan é , e tem-se
(i)
sin = tan cos = cos = ⇒ sin ≈
(ii)
cos =
tan
=
≈1
sin
(iii)
¤
¯
¯ ¯¯ sin cos ∓ cos sin ¯¯ ¯¯ 1 ¯¯
¯
¯
2
2
¯≈¯
¯ = ( não verticais)
¯tan( ± )¯ = ¯¯
2
cos 2 cos ± sin 2 sin ¯ ¯ ± ¯
Proposição 8.45 Sejam tais que ⊥ Então ]( ) ≈ 2
Dem. Seja o declive de e 0 o declive de ( não vertical). Por hipótese
tem-se ≈ − 10 Seja o ângulo entre e . Tem-se
¯ ¯
¯
¯ 0
¯ − ¯ ¯ 0 − (− 10 ) ¯ 0 +
¯≈¯
¯=
= ;
tan = ¯¯
1 + 0 ¯ ¯ 1 − 10 0 ¯
por outro lado tem-se
arctan = ⇔ ≈
2
onde 0.¤
Vamos em seguida introduzir o conceito de quase-congruência:
Definição 8.48 (ângulos quase-congruentes) Um ângulo definido pelas retas
e , de declives e , respetivamente, é quase-congruente com um ângulo
definido pelas retas 0 e 0 de declives 0 e 0 respetivamente, e nesse caso nota-se
∠ ∼
= ∠
se for
≈ 0 ∧ ≈ 0
isto é, se os seus lados forem, respetivamente, quase paralelos.
Proposição 8.46 Se e são ângulos agudos, ∠ ∼
= ∠ ⇔ ] ≈ ]¤
−→
Definição 8.49 (ângulo de dois túbulos) Define-se ângulo dos túbulos e
−−→
como sendo (∠)
Teorema 8.5 ∠ ∼
= ∠0 0 0 ⇔ ∠ ∠0 0 0 ⊂ (∠) , isto é,
dois ângulos são quase-congruentes se e só se um deles está contido numa vizinhança
tubular infinitesimal do outro.¤
184
Um modelo analítico Hilbert-Veronesiano de GNSNA
Definição 8.50 (segmentos ) Sejam ∈ um plano Hilbertiano Não-Arquimediano. Diz-se que é um segmento
i) se ( ) = || = ;
ii) se ( ) = || = ;
iii) se ( ) = || = ;
iv) se ( ) = || = ;
Definição 8.51 (segmentos quase-congruentes) Dois segmentos e são
quase congruentes, e nesse caso nota-se ≈ se
|| ∼
= ||
Proposição 8.47 Se ⊂ ()
i) ∼
=
ii) k ¤
Definição 8.52 (triângulos quase-congruentes) Dois triângulos ∆ e ∆0 0 0
são quase congruentes se os lados correspondentes forem quase congruentes, isto é,
∼
= 0 0 ;
∼
= 0 0 ;
∼
= 00
Proposição 8.48 (critério de quase-congruência) Se
∼
= 0 0 ;
∼
= 0 0;
] ≈ ]0 0 0
então ∆ e ∆0 0 0 são quase congruentes.¤
Proposição 8.49 4 ⊂ (40 0 0 ) ⇒ 4 ∼
= 40 0 0
.¤
Veronese demonstra que
Proposição 8.50 Num triângulo ∆
≈ 0 ⇒ ≈
Dem. Caso contrário a desigualdade ultra-métrica seria violada.¤
Proposição 8.51 (critério ∼ de quase-semelhança) Dois triângulos ∆
e ∆0 0 0 são quase-semelhantes se tiverem dois ângulos quase-congruentes.¤
Proposição 8.52 (critério ∼ de quase-semelhança) Dois triângulos com
lados correspondentes quase-proporcionais, são semelhantes.¤
Proposição 8.53 Num triângulo ∆
∈ @ ∧ ∈ ∅ ⇒ ∆ ≈ 0
8.6
Novas noções
185
Dem. Pelo teorema anterior fica ∼
= e a altura do triângulo em relação a
seria . Assim tem-se
||
=
4 =
2
¤
Proposição 8.54 Se são colineares, || é , ∈ \{} e ∆ ≈
0 então
∆ ≈ ∆
Dem. As duas áreas diferem duma área .¤
Proposição 8.55 || é então k ⇔ ∆ ≈ ∆ ¤
Vejamos alguns aspetos da extensão da ANS à GNA:
Definição 8.53 (halo de um ponto) Dado um ponto ∈ define-se o halo
de
( ) = { ∈ : ( ) = }
É evidente que o halo de um ponto num plano Hilbertiano Não-Arquimediano
é um disco de raio : é uma vizinhança aberta (por 8.4) de (e por 8.30) é
também vizinhança de todos os pontos tais que ∈ ( )
Definição 8.54 (pontos standard e pontos não-standard) Seja um corpo
Não-Arquimediano e o plano Hilbertiano Não-Arquimediano correspondente. ( ) ∈
é dito um ponto standard se e são números standard de , e não-standard
no caso contrário.
Exemplo 8.2 Seja R o conjunto dos números reais standard e R ⊃ R uma extensão
de R, com elementos não-standard. Então no plano Hilbertiano Não-Arquimediano
R os pontos standard são os pontos ( ) com ( ) ∈ R2
Exemplo 8.3 Na Geometria Cartesiana usual em R2 , todos os pontos considerados
são standard.
Proposição 8.56 Seja um ponto standard. Os pontos tais que ∈ ( )\{ }
são pontos não-standard.
Dem. Supondo, sem perda de generalidade, que = = (0 0), seria, para
( ) ∈ ( )\{ }, ou logo, seria não-standard.¤
Corolário 8.9 Um segmento tem um único ponto standard.¤
Tem-se então que um segmento é “isomorfo” ao halo de um ponto ∈
, que é o único ponto standard de
186
Um modelo analítico Hilbert-Veronesiano de GNSNA
Definição 8.55 Ao único ponto standard de um segmento chama-se sombra
desse segmento, e nota-se .
Um importante teorema da ANS é transportado para a nossa GNA onde vai ter
várias aplicações, como veremos adiante:
Teorema 8.6 (discretização de um segmento) Seja um segmento . Podese discretizar com uma partição infinitesimal, = {0 = 1 = },
com +1 , tal que, qualquer que seja i, o segmento +1 tem um único
ponto standard.
Dem. Com efeito, para todo o se tem ≈ +1 Nesse caso não existe nenhum
elemento standard entre e +1 . Com efeito, se existisse um tal elemento, digamos
, ter-se-ia +1 +1 , o que é absurdo. ¤
Finalmente, tem-se o
Teorema 8.7 A Geometria Analítica Cartesiana Hilbertiana Não-Standard NãoArquimediana do plano acima estudado é modelo dos axiomas HV1—HV15.
Dem. Por construção, esta geometria verifica os axiomas de Hilbert, isto é, os
axiomas HV1—HV13. A verificação dos axiomas de continuidade de Veronese, HV14
e HV15, decorre do fato de o corpo base ser, por hipótese, Não-Arquimediano e
por isso da existência de segmentos infinitesimais (continuidade relativa), podendo
estes ter comprimento nulo (continuidade absoluta) .¤
Na secção seguinte procedemos a algumas aplicações elementares do modelo.
8.7
8.7.1
Algumas aplicações elementares do modelo
Novas definições
Nesta secção vamos considerar o modelo H-V, contínuo à Veronese, isto é, verificando
os axiomas VC1 e ou VC2. Colocamo—nos portanto no plano Cartesiano Hilbertiano
Não-Arquimediano Tem-se:
Definição 8.56 (linha poligonal, polígono) Uma sucessão [ ] de pontos standard 0 1 2 define uma linha poligonal 0 1 ∪ 1 2 ∪ ∪ −1 . [ ]
diz-se um polígono, de lados, se
(i) = 0
(ii) 6= 0 ⇒ 6= (condição de não auto-interseção).
Definição 8.57 (curva) Uma curva é uma linha poligonal [ ] com um número
( ∈ ∞) podendo ser notada [ ] caso necessário, onde designa um infinitamente grande específico.
8.7
Algumas aplicações elementares do modelo
187
Observemos que, numa curva, por definição, os pontos 0 1 são standard e,
para cada escala fixada, não existe entre eles nenhum ponto standard (Teorema de
discretização de um segmento (teorema 8.6)5 ).
Definição 8.58 (vértices e lados duma curva) Aos pontos duma curva Γ =
[ ] damos o nome de vértices de Γ e aos segmentos () +1 damos o nome de
lados da curva Γ.
Definição 8.59 (curva de Jordan) Uma curva Γ = [ ] é dita de Jordan se
i) 0 =
ii) 6= 0 ⇒ 6= (condição de não auto-interseção).
Observemos que uma curva de Jordan é um polígono com um número de lados.
Definição 8.60 (circunferência) Uma circunferência é uma curva de Jordan =
[ ], tal que
(i) Para todo o , os segmentos +1 são congruentes entre si;
(ii) A amplitude do ângulo (ip) ∠−1 +1 entre dois lados consecutivos é constante.
Esta definição de circunferência, só legítima numa GNA, debela os problemas de
continuidade advenientes da definição clássica de circunferência. É mais intuitiva,
no sentido em que se trata duma circunferência “traçada” com um compasso6 . Por
outro lado a transferência da continuidade à Veronese da reta para a circunferência
é automática7 .
Definição 8.61 (curvatura duma curva num ponto) Consideremos num plano
Cartesiano Hilbertiano Não-Arquimediano uma curva Γ = [ ] Chama-se curvatura de Γ num ponto ∈ −1 ao ângulo que verifica
(i) = 0 se não for um vértice de Γ (isto é, se for não-standard);
←−→ ←−−→
(ii) = ∠ +1 onde k −1 (ângulo externo), se for um vértice
(isto é, se for standard).
Nota 8.8 O ângulo pode ser orientado positivamente ou negativamente, pelo que
a curvatura de uma curva num ponto pode ser positiva, nula ou negativa.
5
O axioma de continuidade de Veronese garante este mesmo resultado.
A circunferência definida como um conjunto de pontos equidistantes de um determinado ponto
chamado centro não é construtiva nem intuitiva: se fossemos traçar uma circunferência com base
nela nunca conseguiríamos uma curva contínua fechada. As lacunas na linha seriam enormes. A
construção da circunferência com um compasso é a construção de uma linha curva fechada cujos
pontos estão equidistantes do centro - o que é bem diferente do que consta na definição. De facto,
necessário se torna definir primeiro o que é uma curva e o que é uma curva fechada, como fizemos.
Deste modo fica justificada a construção duma circunferência com o compasso, por meio de uma
definição consentânea.
7
Adotando um princípio de continuidade circular, como na Geometria Euclidiana elementar
(ver [32] ou [41], por exemplo).
6
188
Um modelo analítico Hilbert-Veronesiano de GNSNA
Nota 8.9 Observe-se que a curvatura duma curva “concentra-se” nos seus vértices
ou pontos standard.
Pela definição de curvatura, a circunferência tem a mesma curvatura em todos
os seus pontos standard. Uma reta é também uma curva de curvatura constante
e (podendo, em particular ser zero – e esta particularidade é a única distinção
possível entre reta e circunferência, no plano).8
Nota 8.10 Repare-se que os ângulos entre lados consecutivos duma circunferência
são todos , o que poderia levar a que, a uma escala fixa, não se conseguisse distinguir circunferências através das suas curvaturas. Ora, uma boa aproximação
à grandeza desses ângulos, são os ângulos de contingência correspondentes, que
funcionam como uma lupa para ampliar esses ângulos ip e tornar possível a sua
comparação. Assim, dispõe-se dum meio prático para visualizar (“à vista desarmada”) a diferença de curvatura entre duas circunferências quaisquer, já visto no 1
da primeira parte.
Definição 8.62 (raio de curvatura) Chama-se raio de curvatura de uma curva
num ponto de curvatura não nula, ao inverso da sua curvatura nesse ponto.
Definição 8.63 (centro de curvatura) Para uma curva qualquer Γ note-se Γ
ao conjunto dos pontos de Γ com curvatura não nula. Uma curva Γ tem curvatura
constante, se Γ tem a mesma curvatura em todos os pontos de Γ. Nesse caso existe
um ponto do plano (se o plano for completo9 ) equidistante de todos os pontos de
Γ. Diz-se que é o centro de curvatura de Γ e a distância | | ( ∈ Γ) o
raio de curvatura de Γ
Nota 8.11 Se uma curva tem curvatura num ponto, então, nesse ponto tem raio
de curvatura , e vice-versa.
Exemplo 8.4 A reta tem raio de curvatura (ou ∞ no caso absoluto). A circunferência tem como raio de curvatura um número .
Como no caso clássico
Definição 8.64 (evoluta) O conjunto dos centros de curvatura de uma curva Γ
definem uma curva Γ0 chamada evoluta de Γ
A distinção entre circunferências pela sua curvatura pode ser feita através da
distinção das ordens de grandeza do ângulo (nota 8.10) ou equivalentemente
pelas ordens de grandeza (inversas) do seu raio de curvatura. Assim, numa Geometria Não-Arquimediana a várias classes Arquimedianas, correspondentes a
1 2 3 têm-se circunferências com as correspondentes curvaturas10 .
8
No espaço é preciso introduzir a noção de torsão num ponto.
No sentido de Veronese.
10
Pode-se dizer que há uma quantificação na classe das circunferências, e que pela ordenação
de 1 2 3 circunferências de ordens de curvatura diferentes são “concêntricas”, no sentido da
inclusão.
9
8.7
Algumas aplicações elementares do modelo
189
Definição 8.65 (curvatura total) Dada uma curva Γ = [ ] designemos por
a curvatura de Γ no ponto de Γ Vamos identificar com a amplitude de
Chama-se curvatura total de Γ ao número
Γ =
X
=1
Definição 8.66 (reta tangente a uma circunferência) Dada uma circunferência Γ = [ ], uma reta diz-se tangente a Γ se:
i) ∩ Γ 6= ∅
ii) Se ∈ ∩ Γ∧ ∈ −1 \{−1 } então o ângulo entre e −1 é um
menor ou igual à curvatura de Γ em .
Da definição resulta que
i) A intersecção de uma circunferência com a sua tangente pode ser um ponto
standard ou um segmento (que contém um único ponto standard) – o que está
de acordo com a intuição;
ii) Quando se fixa uma ordem de grandeza, a intersecção é sempre um segmento
; de contrário – caso Arquimediano – considera-se que a intersecção é um ponto.
A localização exata do ponto de intersecção é impossível. Apenas se pode aproximála por um segmento .
iii) Estas observações se aplicam à tangência de duas circunferências.
8.7.2
Resolução Não-Standard de problemas standard: algumas ilustrações elementares
Nesta secção vamos fazer, para alguns problemas, aquilo que Eudóxio, Euclides e
Arquimedes fizeram, há mais de 2300 anos, isto é, vamos aplicar um “método de
exaustão” – que pode ser visto como um método Não-Standard – para resolver
problemas standard.
Perímetro duma circunferência
Pela proposição 8.44 sabemos que se é um ângulo , então sin ≈ Ora, seja
um número natural . O perímetro duma circunferência de raio é
¯ ≈ sin
Como
2
2
= tem-se
¯ ≈ sin
2
2
≈
= 2
Na verdade, dividimos a circunferência num número n infinitamente grande de
partes, que foram adicionadas.
190
Um modelo analítico Hilbert-Veronesiano de GNSNA
Área do círculo
Vamos verificar que a área do círculo de raio é -próximo de 2 Com efeito, a área
de um círculo standard de centro é -próxima da área do círculo não-standard
Γ = [ ] onde os estão inscritos sobre a circunferência bordo do círculo standard
. Consideremos então os triângulos infinitesimais ∆ = ∆−1 A área de é
infinitamente próxima da área de Γ e para cada ∈ Γ tem-se
X
∆
≈ Γ =
onde ∗ nota “área de ∗”. A área não depende de mas de que é igual ao raio
de curvatura de Γ que no entanto é constante para cada círculo, sendo portanto o
raio do círculo. Ponhamos
=
Portanto, o ângulo ∠−1 mede
2
∆ =
donde
≈ Γ =
(porque ∈ ) e
2
2
2
2
= 2
Área e volume duma esfera
Seja uma esfera de raio . Tem-se que, para um número , o ângulo
comprimento 2
são . O elemento de área é
sin
2
eo
2 2
2 2
≈
pelo que se tem
2 2
= 42
Para o volume consideramos a esfera preenchida por 2 pirâmides de base igual
a elemento de área e altura igual a . Tem-se então
≈ 2
1 2 2
4
≈ 2 (
) = 3
3
3
onde ∗ significa “volume de ∗”. Ou então, recorrendo ao fato de conhecermos a
área do círculo, temos que a esfera é preenchida por pirâmides cuja soma das
áreas da base é igual à superfície da esfera, tendo-se portanto:
4
1 42
≈ (
) = 3
3
3
8.7
Algumas aplicações elementares do modelo
191
O teorema de Gauss-Bonnet Não-Standard
Este teorema, tão importante para a Geometria como para a Topologia, uma vez
que relaciona uma propriedade geométrica – a curvatura –, com uma propriedade
topológica – a característica de Euler-Poincaré tem, na geometria standard uma
demonstração bastante trabalhosa (ver [69], por exemplo). Aqui vamos dar uma
demonstração simples e intuitiva.
Vamos começar por ver o teorema de Gauss-Bonnet para polígonos. Vamos
considerar apenas o caso de polígonos simples, isto é, inscritos em curvas de Jordan.
No que se segue, um polígono de -lados será designado por um -polígono. Serão
necessários os seguintes resultados preliminares.
Lema 8.1 (existência de diagonais interiores) Para todo o 3, um -polígono tem pelo menos uma diagonal interior.
Dem. Existe pelo menos um ângulo ] menor que Com efeito, basta
tomar como o “vértice mais à esquerda” do polígono. Se está em , então
é uma diagonal. Se não está em , então existem vértices 1 em
∆ Notemos por ( ) a distância entre o ponto e a reta . Escolha-se
em {1 } tal que ( ) ≥ ( ) qualquer que seja . Então não
pode intersectar , pelo que é uma diagonal.¤
Lema 8.2 (soma dos ângulos externos) Supondo que a soma dos ângulos internos de um triângulo é a soma dos ângulos externos de um -polígono é 2
Dem. Por indução em , tem-se: para = 3 (caso do triângulo), notem-se os
ângulos por Então
− = +
− = +
− = +
Portanto, a soma dos ângulos externos é o dobro da soma dos ângulos internos, isto
é, vale 2 Suponha-se então que a hipótese é verdadeira para todo o polígono com no
máximo lados. Considere-se então um polígono com + 1 lados. Pela proposição
anterior, existe pelo menos uma diagonal . Então corte-se o polígono ao longo
de , resultando dois polígonos com no máximo lados. Existem dois ângulos
internos em e dois em . Notem-se esses ângulos por 1 2 1 2 respetivamente,
tais que 1 e 1 estejam num polígono e 2 e 2 estejam no outro polígono. Então
a soma dos ângulos externos do polígono com + 1 lados é
2 − ( − 1 ) − ( − 1 ) + 2 − ( − 2 ) −
−( − 2 ) + ( − (1 + 2 )) + ( − ( 1 + 2 ))
= 2
¤
192
Um modelo analítico Hilbert-Veronesiano de GNSNA
Lema 8.3 (soma dos ângulos internos) A soma dos ângulos internos de um polígono é ( − 2)
Dem. A soma de um ângulo externo com o seu interno correspondente é Como
existem vértices, a soma de todos os ângulos internos e externos é Portanto a
soma dos ângulos internos é
− 2 = ( − 2)
¤
Para o caso de polígonos simples necessitamos da
Definição 8.67 (característica de Euler) Seja um poliedro −dimensional.
Chama-se característica de Euler de ao número
( ) = − +
onde é o número de faces, o número de vértices e o número de arestas.
Teorema 8.8 (Gauss-Bonnet para polígonos) Se é um -polígono, então a
soma dos ângulos externos (a curvatura total) de é 2( )
Dem. Por indução em .¤11
Gauss-Bonnet para poliedros
Vejamos agora o mesmo teorema para poliedros. Temos
Definição 8.68 (défice angular) O défice angular de um poliedro num vértice
é igual a 2 menos a soma dos ângulos dos lados que se intersectam nesse vértice.
Observemos que o défice angular dum poliedro num vértice é uma espécie de
curvatura desse poliedro, no vértice em causa, que concentra toda a curvatura dos
pontos nas faces adjacentes.
Exemplo 8.5 Se um poliedro é plano (equivalente a um grafo planar) o défice angular em todos os pontos é nulo.
Teorema 8.9 (do défice angular) A soma dos défices angulares de um poliedro
fechado é 2
11
Recordemos que um polígono simples, é topologicamente equivalente a um disco, tendo portanto característica um. Um polígono com um ponto duplo é topologicamente a dois discos, tendo
característica dois, etc. Assim um polígono com pontos duplos terá característica . Tem-se
então que se é um -polígono com pontos simples, então a soma dos ângulos externos de é
2
8.7
Algumas aplicações elementares do modelo
193
Dem. Vamos igualar duas formas de somar os ângulos numa superfície poliédrica
e enumerar as faces = 1 , e os vértices = 1 . Seja o número de lados
da face . Seja o défice angular do vértice . Então tem-se
X
X
( − 2) =
(2 − )
=1
=1
X
=1
X
X
=
(2 − ) +
2 =
=1
= 2 −
=1
X
+ 2
=1
O segundo termo do lado direito conta todos os lados em todas as faces, multiplicados
por Como toda a aresta do poliedro limita exatamente duas faces, esse termo
apenas conta duas vezes o número total de arestas , vezes :
X
=1
= 2 − 2 + 2 = 2
¤
Exemplo 8.6 Nos polígonos regulares tem-se = 2 Por exemplo, para um tetraedro regular tem-se que cada vértice é o ponto de encontro de três triângulos equiláteros. Então em cada vértice o défice angular é = 2 − 3(3) = Então,
X
= 4 = 4 = 2
Para poliedros com bordo, temos que considerar o défice angular nos vértices
do bordo.
Definição 8.69 (défice no bordo) Seja um poliedro com bordo , e ∈ .
Chama-se défice no bordo de no ponto ao número () = − onde é a
soma dos ângulos interiores das faces que se intersectam em .
Teorema 8.10 (Gauss-Bonnet para poliedros) A soma dos défices angulares
dos vértices do interior de um poliedro, mais a soma dos défices nos pontos do
bordo, é igual a 2
Dem. Enumeremos as faces com = 1 , os vértices interiores com =
1 , os vértices do bordo com = 1 . Seja o número de lados da face .
Seja o défice angular do vértice interior . Seja o défice no bordo do vértice
194
Um modelo analítico Hilbert-Veronesiano de GNSNA
do bordo. Então
X
X
X
( − 2) =
(2 − ) +
( − )
=1
X
+
=1
X
=
=1
=1
X
X
=1
=1
(2 − ) +
= 2 −
X
=1
2 +
=1
−
X
=1
X
=1
+
X
+
2
=1
O segundo termo do lado direito é o número de lados em cada face, multiplicado
por Cada aresta limita duas faces, exceto as do bordo, que limitam apenas uma
face. O terceiro termo é o número de vértices do bordo, que é igual ao número de
arestas do bordo. Portanto, a soma do segundo com o terceiro termos é o dobro do
número total de arestas , vezes :
X
=1
¤
+
X
=1
= 2 − 2 + 2 = 2
Exemplo 8.7 Consideremos um tetraedro sem uma das faces. Obtém-se um “funil
poliédrico” com 4 vértices, e arestas e três faces, pelo que se tem = 1 isto é,
trata-se de uma superfície topologicamente equivalente a um disco ou círculo. Três
triângulos equiláteros se intersectam no vértice do interior, pelo que o défice angular
nesse vértice é
= 2 − 3( ) =
3
Em cada vértice do bordo intersectam-se dois triângulos equiláteros, pelo que se tem
em cada um desses vértices
= − 2( ) =
3
3
Então
X
X
+
= + 3( ) = 2 = 2
3
Gauss-Bonnet para superfícies mergulhadas num espaço Cartesiano
Hilbertiano Não-Arquimediano
Teorema 8.11 (Gauss-Bonnet) Seja uma superfície orientável, o seu
bordo, e a característica de Euler de . Então
I
ZZ
+
≈ 2
onde é o elemento de área de (isto é um pedaço de com área ),
o elemento de arco de (isto é, um pedaço de com comprimento ), a
curvatura gaussiana de nos pontos do interior de e a curvatura geodésica
de
8.8
Conclusões
195
Dem. Façamos uma triangulação de de modo que cada triângulo tenha lados
. Resulta que a área de cada um desses triângulos é e vértices standard, e o
bordo está inscrito numa curva não-standard. Então a superfície é infinitamente
próxima do poliedro não-standard . Assim a curvatura de todo o ponto de será
infinitamente próxima do défice angular respetivo nesse ponto. Assim
12
ZZ
+
I
≈
X
=1
+
X
=1
= 2 − 2 + 2 = 2
¤
8.8
Conclusões
Neste capítulo vimos uma realização analítica do modelo Hilbert-Veronesiano. Tal
modelo permitiu a introdução de novos conceitos. Também vimos algumas ilustrações de como esse modelo, comportando os novos conceitos, pode ser aplicado
na formulação e resolução de problemas clássicos. Tal é um indicador que o mesmo
pode ter muitas vantagens pedagógicas, pois pode-se introduzir conceitos interessantes em classes pouco avançadas, conceitos esses que embora simples, requerem,
no quadro clássico, aparatosos instrumentos, só construtíveis depois de muitas bases.
Outras vantagens haverá certamente, como a aproximação da geometria às ciências experimentais, podendo daí resultar grande simbiose.
12
A triangulação existe sempre que a superfície seja suave.
196
Um modelo analítico Hilbert-Veronesiano de GNSNA
CAPÍTULO 9
Modelos sintéticos
Hilbert-Veronesianos de GNSNA
9.1
Introdução
Qualquer geometria analítica sobre um corpo Não-Arquimediano é um modelo analítico de Geometria Não-Standard Não-Arquimediana. Assim, são exemplos de geometrias analíticas Não-Standard Não-Arquimedianas, todas as geometrias
baseadas nos corpos Q de números -ádicos, por exemplo.
Os exemplos que vamos apresentar neste capítulo têm duas características:
i) São sintéticos – não nos preocupamos, à partida, com as características precisas do seu corpo base;
ii) São elementares – pretendemos apresentar a Geometria Não-Standard NãoArquimediana (bem como a intuição geométrica que ela encerra) através de modelos
muito simples, por forma a que essa matéria seja suscetível de ser incluída nos cursos
de Geometria Elementar.
Iniciamos com a exibição de um modelo sugerido por Veronese e que encerra
todo o paradigma concetual de uma Geometria Não-Standard Não-Arquimediana.
9.2
9.2.1
Modelo prático de Veronese
Apresentação do modelo
O modelo que a seguir apresentamos é inspirado na “representação duma parte do
contínuo intuitivo” por Veronese [ver Apêndice A] e aparece também referido em F.
Enriques [24].
Consideremos, num plano Cartesiano ( eventualmente igual a R) duma
Geometria Absoluta, um feixe ordenado com um número ilimitado de retas paralelas,
= { −2 −1 0 1 2 } tal que a distância de a +1 é constante. Pode-se
considerar essas retas ordenadas “em sentido vertical, de baixo para cima” a partir
de uma reta origem 0 ao mesmo tempo que cada reta está ordenada da forma
197
198
Modelos sintéticos Hilbert-Veronesianos de GNSNA
usual, “na horizontal, da esquerda para a direita”, a partir de um ponto origem
escolhido. Consideremos a seguir o conjunto de todos os pontos dessas retas como
um sistema ordenado (S ≺), de forma que todo o ponto , situado à direita de um
ponto , sobre a mesma reta, e quaisquer o pontos , situados em retas acima
do suporte de um ponto , sejam considerados “maiores que ”. Por exemplo, na
figura abaixo tem-se que ≺ ; ≺ ; Â :
Fig. 17. Ilustração do modelo prático de Veronese. Fonte: Autor.
Definamos em (S ≺) um segmento da maneira usual:
= { ∈ S : − − } ∪ { }
onde − − ⇔ ≺ ≺ Chamemos retas de aos sistemas do tipo (S ≺),
e notemo-los por Acrescentemos a condição que nenhum sistema (S 0 ≺) resulta
de outro sistema (S ≺) por refinamento.
É fácil ver que o sistema V2 = ( ) verifica todos os axiomas planares de
incidência, I, ordem II e congruência III, de Hilbert. Com efeito dados dois pontos
distintos, de V2 , existe uma e uma só reta de V2 que passa por eles1 . Por outro
lado, por construção, S tem um número infinito de pontos, e dada uma reta de
V2 existem pontos de V2 não pertencentes a , (os que estão entre as paralelas)
pelo que são verificados os axiomas planares de incidência. Os axiomas de ordem
são trivialmente verificados pois ≺ é uma ordem total. Os axiomas de congruência
(de segmentos) também são verificados, uma vez que, tal como se exige em Hilbert,
a congruência de dois segmentos é compatível com uma “translação” que leve um
deles a sobrepor-se sobre o outro, “ponto por ponto”.
Ora, neste modelo, para além dos segmentos usuais da Geometria Euclidiana
(os que jazem sobre uma reta horizontal), existem segmentos estranhos, como por
exemplo, o segmento na figura acima.
É claro que nesta geometria é válido o axioma de continuidade de Cantor (Apêndice
B), mas não é válido o axioma de continuidade de Dedekind. Aliás, como é evidente,
1
Isto resulta da imposição da última condição acima. Na verdade, este axioma Hilbertiano
é bastante discutível em matéria de Geometria Não-Arquimediana (ver observação 10.7 e [31] ,
apêndice 4).
9.2
Modelo prático de Veronese
199
também nela não é válido o axioma de Arquimedes, pois, por maior que seja um
múltiplo de , por exemplo, nunca excederá .
Trata-se pois de um modelo de Geometria Não-Arquimediana, (logo, Não-Standard),
não-contínua no sentido de Dedekind, porém contínua no sentido Veronesiano: se
considerarmos os extremos do segmento a se aproximam indefinidamente um do
outro, da contração infinita resulta sempre um segmento, com pontos de 0 e pontos
de 1 . Trata-se de um modelo H-V que verifica os axiomas HV1-HV15.
9.2.2
Generalizações do modelo
O modelo acima apresentado é facilmente generalizável, ao espaço ordinário, E.
Basta considerar-se um feixe de planos paralelos e em cada um desses planos
um sistema de retas paralelas, como no modelo V2 , acima. O sistema ordenado
(E ≺0 ) onde ≺0 é uma extensão de ≺ através da inclusão na ordem da hierarquia
dos planos Não-Arquimediano, tem três ordens de grandezas (figura abaixo):
Fig. 18. Ilustração do modelo prático de Veronese. Fonte: Autor.
Fixando-se uma unidade , tem-se:
= ∈ ;
= ∞1 +
3);
onde ∞1 é, na notação de Veronese, para a primeira ordem de infinito (capítulo
= ∞1 ∞1 + = ∞2 + ;
= ∞2 + ∞1 +
onde ∈ Z
200
Modelos sintéticos Hilbert-Veronesianos de GNSNA
Este processo é rapidamente generalizável a um espaço ambiente -dimensional.
A distância entre dois pontos e desta geometria é um número ∈ II+
0 de
Veronese. Associando a cada ponto a sua distância a um ponto chamado origem,
cada ponto do novo plano é identificado com a sua coordenada ( ), que será um
número pertencente a II.
Estes modelos, que serão designados por V , são modelos H-V e verificam os
axiomas HV1-HV15. Dão uma ideia prática da construção vertiginosa de Veronese.
Na secção seguinte vamos propor e estudar um modelo isomorfo ao modelo V2 , mais
intuitivo e mais prático.
9.3
9.3.1
Modelo da reta sincopada
Apresentação do modelo
Colocamo—nos de novo no modelo V2 de Veronese. Podemos dar outra
configuração visual ao sistema, fazendo-se uma espécie de “linearização” do feixe
de retas paralelas , ∈ Z “varrendo” na sua totalidade o feixe de uma só vez2 .
Assim o segmento da figura da secção 9.2.1 pode ser representado como tendo
umas “reticências”, “(...)”, que serão chamadas de síncope, lacuna ou lanço
infinito:
Fig. 19. Segmento sincopado. Fonte: Autor.
Uma reta, semirreta ou segmento de reta, que apresente (...)’s será denominado
de sincopado3 . Na figura acima, pode-se considerar que o segmento sincopado
pertence à reta sincopada . Obtém-se a reta a partir do feixe , fazendo um
“varrimento” na ordem ≺. Assim as duas ordens, (acima-abaixo, direita-esquerda)
convertem-se numa única ordem, total. A síncope (...) ou lanço infinito, de
representa uma “colagem” de duas retas consecutivas (na ordem acima-abaixo), no
infinito.4
A generalização V do modelo V2 , indicada na secção anterior, reflete-se no
modelo de retas sincopadas, da seguinte maneira: pode-se considerar retas de retas
2
Isto permite considerar, no plano, vários feixes, paralelos ou não.
Note-se que “síncope” é um termo não definido. Trata-se, nesta geometria, de enriquecer a
linguagem (e as imagens) com um novo substantivo, correspondente ao predicado “sincopado”, e
derivados.
4
Observe-se que, no caso de ser = R, portanto, um corpo arquimediano, as retas sincopadas
serão, Dedekind-contínuas na vizinhança linear de um ponto finito e não Dedekind-contínuas globalmente, pois “os pontos de colagem das retas no infinito” são estranhos ao alcance do axioma de
Dedekind. Por outro lado, se considerarmos que esses “pontos” passam a estar incluídos na reta,
esta passa a ser uma extensão da reta arquimediana, e conterá elementos estranhos a R.
3
9.3
Modelo da reta sincopada
201
sincopadas (aparecendo síncopes de segunda, terceira, ...., -ésima ordem, (... ...),
(... ... ... ...), ...), para espaços Cartesianos ambiente de dimensões 3 4 − 1,
respetivamente (figura abaixo):
Fig. 20. retas multisincopadas. Fonte: Autor.
retas, semirretas, segmentos, com síncopes de, no máximo, ordem dizem-se
retas, semirretas, segmentos, sincopados de ordem ou retas -sincopadas, respetivamente. Para simplicidade da linguagem, nos casos em que não se compromete a
clareza, utilizamos as expressões “reta sincopada” e “reta multi-sincopada” para significar uma reta com -síncopes, 0; noutros casos, a expressão “reta sincopada”
designará uma reta com uma síncope. De igual modo substituiremos a expressão
“1-síncope” por “síncope”.
9.3.2
Generalidades sobre o modelo
Observemos que para se fazer geometria com a reta sincopada, com algum interesse
temos de adotar os axiomas de continuidade de Veronese. Assim, o modelo da
reta sincopada, em que vamos trabalhar, baseia-se nos axiomas (convenientes) da
Geometria Absoluta de Hilbert, mais os axiomas de continuidade linear de Veronese.
Trata-se pois dum modelo Hilbert-Veronesiano (H-V).
Para maior simplicidade, vamos considerar retas sincopadas de ordem um, num
plano ordinário5 . Na prática trata-se de considerar, num plano usual (no sentido
Cartesiano real, por exemplo) retas 1-sincopadas ilimitadas, que representam planos
usuais de retas não sincopadas, segundo a correspondência6 :
¾
½
feixe plano de retas não sincopadas
reta sincopada
←→
(pontos não linearmente ordenados)
(pontos linearmente ordenados)
Os elementos desta geometria são:
5
O que é equivalente a trabalhar com um modelo sincopado de ordem dois – existente portanto
num espaço tridimensional –, mas não permitindo a “compactificação” resultante da “colagem”
no infinito das retas 1-sincopadas.
6
Observe-se que este método é na prática uma redução de dimensão topológica usual: cada reta
1-sincopada é um plano usual. Aplicando o mesmo método, pode-se “projetar” num plano usual
retas sincopadas de ordem dois, três, , correspondentes a espaços usuais de dimensão 3, 4 e + 1,
respetivamente.
Quando se estudar bem as “leis” destas projeções, vai-se, sem dúvida, compreender e intuir
melhor os espaços usuais -dimensionais.
202
Modelos sintéticos Hilbert-Veronesianos de GNSNA
– Os pontos usuais de Não-Arquimediano;
– retas sincopadas;
– Planos usuais;
– Planos Cartesianos sincopados.
Vejamos agora as ordens de grandeza na reta sincopada. Seja uma reta multisincopada e dois pontos de , tais que o segmento não é sincopado.
Fig. 21. Ordens de grandeza na reta sincopada. Fonte: Autor.
Em relação ao comprimento dos seus segmentos, uma reta sincopada possui
várias ordens de grandeza: segmentos infinitamente pequenos, infinitamente grandes,
apreciáveis e limitados. A questão das ordens de grandeza é posterior a uma fixação
de uma escala ou unidade. Por exemplo, definirmos que um segmento unidade é um
segmento não sincopado, como (figura acima), tem-se que qualquer segmento
sincopado, digamos é infinitamente grande em relação a , e a ordem de
grandeza desse infinitamente grande depende do número de síncopes de bem
como da ordem dessas síncopes. Reciprocamente, se fixarmos como unidade um
segmento com um número finito fixo de síncopes, digamos, , qualquer segmento
não sincopado é infinitamente pequeno (figura acima), de coeficiente em relação a
. Por outro lado um segmento com uma 1-sincope, como , é finito em relação
a :
≈ ∈ N
Neste ponto convém fazer a seguinte observação: é evidente que um segmento
não sincopado pode ser dividido num número tão grande quanto se queira de subunidades. No caso de esse número ser infinito atual de ordem 1, teria uma
síncope (e síncopes para um infinito de ordem ). Este fato permitiria ter em
presença 3 (ou mais) ordens de grandeza: finito, infinitamente grande em
relação a e , digamos em relação a . Tal é a complexidade do quadro
geométrico das retas sincopadas.
Antes de dar continuidade ao estudo da estrutura geométrica da reta sincopada,
vamos rever e reformular dois conceitos fundamentais: o de relação Arquimediana e
o de classe Arquimediana num grupo ordenado, introduzido por Hahn [42].
Definição 9.1 (relação arquimediana) Seja um grupo ordenado. Em podese estabelecer a relação Arquimediana do seguinte modo:
∀ ∈ ( ) ⇔ ∃ ∈ N :
9.3
Modelo da reta sincopada
203
Ora é uma relação de equivalência em . Com efeito é evidentemente
reflexiva, é simétrica pois se existe tal que então qualquer que seja ∈ N
tem-se pelo que
( ) ⇔ ( );
também é transitiva, pois se e tem-se que , isto é,
( ) ∧ ( ) ⇒ ( )
Definição 9.2 (grupo arquimediano) Um grupo ordenado é Arquimediano se
∀ ∈ ( )
ou, o que é o mesmo
∀ ∈ ∃ ∈ N : (Axioma de Arquimedes)
Exemplo 9.1 É o caso dos conjuntos Q, R tal como usualmente algebrizados e
ordenados.
Definição 9.3 (grupo não-arquimediano) Um grupo ordenado em que existem pares de elementos que verificam a relação Arquimediana, diz-se Não-Arquimediano:
∃ ∈ : ( )
Exemplo 9.2 É o caso de ∗ R da Análise Não-Standard, e de C com a ordem lexicográfica.
É claro que todo o grupo Arquimediano é Não-Arquimediano.
Exemplo 9.3 Um exemplo clássico é o seguinte: seja = () o corpo dos quocientes de polinómios com coeficiente racional. () pode ser ordenado da seguinte
maneira: sejam () e () elementos distintos de (), escritos na forma irre()
, não tendo e fatores comuns para além de constantes.
dutível, isto é, () = ()
Idem para (). Neste caso existe um número positivo 0 tal que uma das seguintes
afirmações é verdadeira:
(i) Se 0 , então () ();
(ii) Se 0 , então () ().
Se (i) for verdadeira, põe-se  e se (ii) for verdadeira põe-se ≺ O corpo
(() ≺) é Não-Arquimediano.
Definição 9.4 (classe arquimediana) Seja um grupo ordenado. A relação
divide em classes de equivalência, chamadas classes Arquimedianas de 7
7
O conceito foi introduzido simultaneamente por Veronese e Bettazzi, mas a denominação pertence a Newman (1947), embora se possa, sem complexos, atribuir a mesma a Hans Hahn, 1907,
que elaborou toda a teoria a partir dos seus predecessores.
204
Modelos sintéticos Hilbert-Veronesianos de GNSNA
Definição 9.5 ((Hahn) tipo de classe de um grupo) Chama-se tipo de classe
(Arquimediano) de ao tipo de ordem (Cantoriano) de .
Um grupo Arquimediano é um grupo de tipo de classe 1.
Hahn demonstra também, recorrendo ao princípio da boa ordem o
Teorema 9.1 (Hahn 1907) As grandezas de um sistema Não-Arquimediano arbitrário de grandezas (isto é, um grupo totalmente ordenado, abeliano) podem ser
expressas como números complexos8 cujas unidades formam um conjunto ordenado
Γ, e cujo tipo de ordem é o tipo de classe do sistema transarquimediano.¤
Exemplo 9.4 O conjunto dos números complexos tem tipo de classe finito igual a
2. O conjunto H dos quaterniões de Hamilton também tem tipo de classe finito,
igual a 4. O “conjunto” No de Conway tem tipo de classe infinito. O conjunto V
de Veronese tem tipo de classe infinito.
Proposição 9.1 (Hahn 1907) Existem sistemas Não-Arquimedianos de qualquer
tipo de classe arbitrariamente fixado.¤
Proposição 9.2 (Bettazzi 1890) Qualquer sistema Não-Arquimediano de grandezas, de tipo de classe finito, pode ser representado aritmeticamente através de números
complexos com (finito ou infinito) unidades9 .¤
Definição 9.6 (grupo anti-arquimediano) Um grupo ordenado em que não
há nenhum par que verifica a relação Arquimediana diz-se um grupo anti-arquimediano:
∀ ∈ ¬( )
onde “¬” representa negação.
Exemplo 9.5 Seja Γ o conjunto das unidades das classes Arquimedianas de um
grupo ordenado transarquimediano . Então Γ é um grupo ordenado (subgrupo de
com a ordem induzida) e é um grupo anti-arquimediano.
9.3.3
Estrutura geométrica da reta sincopada
Tomemos uma reta sincopada , contínua à Veronese, dotada de uma estrutura de
grupo ordenado pelos axiomas da Geometria Absoluta de Hilbert, e cujos elementos
são segmentos definidos por pares de pontos. Marquemos uma origem e um ponto
sobre . Tomemos como unidade. Tem-se a
8
Séries formais.
O termo “unidade” é usado no sentido de unidade de medida, nada tendo a ver com a noção de
unidade de uma estrutura algébrica. Por exemplo: em C a unidade real é 1 e a unidade imaginária
é . Porém as unidades dos grupos (C +) e (C,×) são zero e um, respetivamente.
9
9.3
Modelo da reta sincopada
205
Definição 9.7 (campo de um ponto) Todos os pontos de para os quais
pertence à mesma classe Arquimediana que constituem o campo Arquimediano
de , (ou simplesmente, campo de ) em relação à unidade . O campo de
um ponto em relação a um segmento unidade , é notado (). Quando a
unidade é subentendida, nota-se apenas ().
Vejamos alguns resultados de Veronese sobre campos:
Teorema 9.2 (Veronese) Dadas dois campos de unidades e 0 0 respetivamente tais que
0 0
0 0
(1)
(2)
e com ∈ N os campos das duas escalas são iguais.¤
Observação: este teorema mostra que todos os segmentos da mesma classe Arquimediana podem ser tomadas como unidade dessa classe, resultando sempre o
mesmo campo.
Corolário 9.1 Dados dois campos com as unidades e 0 0 respetivamente, tal
que sejam satisfeitas as condições (1) e (2) do teorema anterior, e = 0 então os
dois campos são iguais.¤
Corolário 9.2 Dados dois campos de um ponto , se a unidade de um deles é
múltiplo da unidade do outro ou se um contém um número de submúltiplos do
outro então esses dois campos são iguais.¤
Definição 9.8 (campos de mesma espécie) Dados dois pontos e , com campos gerados por unidades e , respetivamente, tal que é múltiplo ou divisor de
. Esses dois campos dizem-se de mesma espécie.
Teorema 9.3 (Veronese) Dada uma escala de unidade sobre a reta e uma
outra de unidade 0 de origem 0 , se não existir um número tal que
0 se for 0
ou então
0 se for 0
o campo da escala de unidade não é igual ao campo da escala de unidade 0 .¤
Teorema 9.4 (Veronese) Se o campo da escala de unidade 0 0 é igual ao de
, existe sempre um número tal que
( − 1)0 0 ≤ 0 0 se 0 0
¤
206
Modelos sintéticos Hilbert-Veronesianos de GNSNA
Convém observar o seguinte: dada uma reta sincopada , um ponto sobre ela
e um segmento não sincopado tomado como unidade, seja um segmento
menor que , mas tal que não pertence ao campo de 10 . Nesse caso tem-se
forçosamente que é . Isto é,
Definição 9.9 (campo e campo ig de um ponto) Numa reta sincopada , de
unidade dados os pontos tem-se:
i) 3 pertence ao campo de se || for . O campo de nota-se
()
ii) 3 pertence ao campo de se || for O campo de nota-se
()
Em virtude dos axiomas de continuidade HV14 e HV15, tem-se
Proposição 9.3 Numa reta sincopada, para uma unidade escolhida, um ponto
tem três campos: um campo (halo de ), um campo Arquimediano (galáxia principal de ) e um campo (galáxia de ).¤
Ainda como consequências dos axiomas de continuidade temos:
Proposição 9.4 Existe sempre, pelo menos, um ponto fora do campo Arquimediano
de um ponto de qualquer previamente fixado.¤
Têm-se também a proposição:
Proposição 9.5 Todos os campos de todos os pontos são isomorfos, a menos das
escalas.¤
Também, pela definição de campo e pelos axiomas da geometria absoluta, temos
o seguinte resultado
Teorema 9.5 (homogeneidade da reta sincopada) Dados dois pontos quaisquer
de uma reta sincopada eles possuem campos de mesma espécie, disjuntos.¤
Assim uma reta sincopada pode ter os seguintes aspetos, passando do local ao
global:
10
Pois dada a ausência do axioma de Arquimedes, não há submúltiplos tão pequenos quanto se
queira.
9.3
Modelo da reta sincopada
207
Fig. 22. aspetos localizantes da reta sincopada. Fonte: Autor.
etc..., e nunca terá o aspeto “compacto”.
Definição 9.10 (segmento --sincopado) Um segmento é dito − − sincopado se possuir síncopes de ordem .
Por uma questão de “imagem visual”, num segmento vamos chamar ilha de
um ponto ∈ a ( ) ∪ ( )
Um segmento − 1− sincopado, com um ponto identificado em cada
uma das + 1 ilhas, 0 = 1 = , é notado por uma lista ordenada
= ( = 0 1 = )
Seja um segmento com uma síncope de ordem 1. É evidente que a síncope
fica fora do campo de e fora do campo de . Como esses campos são criados
pelo mesmo segmento unidade, são geometricamente “isomorfos”. Assim, a síncope
() está “equidistante” de e de (embora na representação gráfica tal possa não
acontecer).
Vamos agora introduzir o predicado standard nesta geometria, associando-o às
síncopes “(...)”11 .
Definição 9.11 (segmento standard, não-standard) Numa reta sincopada, um
segmento diz-se standard se não for sincopado. No caso contrário diz-se não-standard.
Definição 9.12 (partes standard e não-standard de um segmento) Seja
um segmento sincopado, em relação a uma unidade “standard” = com
− − Chama-se parte standard de , notado () ao segmento
() = (() ∩ ) ∪ (() ∩ )
Chama-se de parte não-standard de ao segmento
() = − ()
Para um segmento = (0 1 ) − 1− sincopado, tem-se
() = ∪=0 ( +1 )
Nota 9.1 É evidente que a síncope () de está contida em ().
11
Podia-se usar outra designação, por exemplo, “parte sincopada” e “parte não sincopada”.
208
Modelos sintéticos Hilbert-Veronesianos de GNSNA
Definição 9.13 (parte standard esquerdo e direito de um segmento) Seja
um segmento sincopado, em relação a uma unidade “standard” = com
− − Ao segmento () ∩ dá-se o nome de parte standard esquerdo
de e escreve-se
− () = () ∩
Ao segmento () ∩ dá-se o nome de parte standard direito de e escreve-se
+ () = () ∩
Nota 9.2 É evidente que nenhuma parte (ponto ou segmento) de + () é comutável com nenhuma parte de − (), isto é, não se pode passar (por translação,
por exemplo) uma parte dum segmento sincopado, da esquerda da síncope para a
direita, e vice-versa.
→
De forma idêntica se definem as partes standard e não-standard de uma reta ←
,
−→
→
−
duma semirreta , dum raio , ou de qualquer subconjunto da reta sincopada,
fixada uma unidade standard de comprimento.
Na comparação de dois segmentos sincopados, é natural que tenhamos em conta
as partes e de ambos. Dediquemo-nos portanto à congruência de segmentos
sincopados.
A ideia intuitiva que está por de trás do conceito de congruência é a de comprimento. Ora, em virtude de uma certa “elasticidade” na representação dos segmentos
sincopados, muita dessa intuição vai perder-se, na extensão do conceito. Para a extensão da relação de congruência aos segmentos sincopados, há que considerar vários
casos, que se ilustram na figura abaixo:
Fig 23. Congruências de segmentos sincopados. Fonte: Autor.
Intuitivamente, tem-se que:
Caso 1) ≡ ; Caso 2) não é congruente com ; Caso 3) não é
congruente com ; caso 4) não é congruente com 12 .
12
Pode-se dizer que esses pares de segmentos “não coincidiriam ponto por ponto” se um fosse
deslocado até ao outro, na ideia intuitiva remanescente de Euclides.
9.3
Modelo da reta sincopada
209
Duma maneira geral, para analisarmos a congruência de dois segmentos sincopados, temos de olhar para a sua “estrutura geométrica”, isto é, para os campos dos
seus pontos, ou seja ainda, para as suas partes standard e não-standard. Formulemos
a
Definição 9.14 (congruência de segmentos sincopados) Os segmentos sincopados e são congruentes se e só se cumpre as duas seguintes condições:
i) ≡ (no sentido Hilbertiano)
ii) () = ().
Nota 9.3 Esta definição é também válida para a classe dos segmentos − − sincopados, ∈ N0 com as devidas adaptações.
Exemplo 9.6 Na figura acima, não é congruente com pois não são congruentes no sentido Hilbertiano; não é congruente com pois, embora sejam
congruentes no sentido Hilbertiano, tem parte não-standard vazia, enquanto
que tem parte não-standard não vazia (é sincopado); não é congruente com
pois, embora sejam congruentes no sentido Hilbertiano, têm partes standard
diferentes13 .
Proposição 9.6 Nenhum segmento é congruente com uma sua parte própria.
Dem. Caso contrário haveria contradição com i) da definição de congruência.¤
A questão da divisão de um segmento, isto é, da construção de escalas racionais
em segmentos sincopados vai merecer agora a nossa atenção. Com efeito, dado um
segmento sincopado pretendemos dividi-lo em ∈ N partes (iguais ou desiguais),
colocando (ou identificando) pontos entre e .
Suponha-se, em primeiro lugar que = 2. Podemos ter um e um só dos três
casos seguintes:
() ∈ () ∩ ;
() ∈ () ∩ ;
() ∩
() ∈
() ∩ ∧ ∈
Nos casos () e () o segmento fica dividido em duas partes não congruentes, herdando uma delas a síncope; No caso () fica dividido em duas partes
congruentes, simétricas e ambas sincopadas. Como os campos (para uma unidade
fixada) de quaisquer pontos, são isomorfos, o campo de é isomorfo aos campos
de e de , pelo que os segmentos e são sincopados e congruentes, mas
nenhum deles congruente com .
O mesmo processo pode-se iterar vezes, obtendo-se a divisão de em + 1
partes congruentes entre si, dois a dois.
13
Só se poderiam igualar contradizendo a nota 9.2.
210
Modelos sintéticos Hilbert-Veronesianos de GNSNA
Para a divisão em partes, não necessariamente congruentes, mas todas sincopadas, aplica-se o processo as vezes necessárias e nos locais pertinentes14 .
Será possível dividir um segmento sincopado num número qualquer de partes
congruentes entre si? A resposta é negativa, para finito15 .
Introduzimos a seguir a noção de potência dum segmento sincopado:
Definição 9.15 Um segmento − − sincopado, ∈ N0 diz-se ter potência .
Pode-se estabelecer no plano uma relação de equipotência entre segmentos, que
será obviamente uma relação de equivalência, representada pelo símbolo ∼
= A
equipotência entre dois segmentos implica a existência das mesmas ordens de grandeza
em ambas. A recíproca porém é falsa.
Todo o segmento sincopado é equipotente com um número ∈ N de suas partes
próprias:
Fig. 24. Segmentos equipotentes. Fonte: Autor.
Tem-se
∼
= ;
&
É evidente que a potência dum segmento − − sincopado é maior ou igual à
potência de uma sua parte própria.
As definições de reta, raio e semirreta sincopados são imediatas: a diferença entre
uma reta e um segmento é o fato de aquela não ter extremos. O mesmo acontece
para as retas sincopadas. Uma semirreta sincopada define-se de forma idêntica. Uma
reta não sincopada é uma ilha. Um raio sincopado é uma reta sincopada orientada.
Os novos conceitos permitem-nos caracterizar a topologia da reta sincopada. O
conceito de campo de um ponto numa reta sincopada define, como o de halo
de um ponto, visto no capítulo 4, de forma natural, um conceito de proximidade na
reta sincopada. Assim
14
Uma questão interessante é a seguinte: construir um algoritmo que coloque novos pontos
nos locais mais adequados de modo que, quando tende para o infinito, os segmentos sejam todos
quase-congruentes, isto é, torne a sua diferença quase nula.
15
A única possibilidade de fazer isso consiste na aplicação de um axioma de redução tipo
Carnotiano, que permita desprezar as diferenças infinitesimais entre as partes: todos os segmentos -sincopados são “congruentes” entre si. Naturalmente um tal enunciado traria desgostos,
como por exemplo, um segmento sincopado poder ser congruente com uma sua parte própria, contradizendo os axiomas da geometria absoluta. Contudo é algo que se pode fazer, recorrendo aos
devidos ajustamentos.
9.3
Modelo da reta sincopada
211
Definição 9.16 (proximidade na reta sincopada) Numa reta sincopada, um ponto é:
(i) -próximo de se ∈ (), isto é, é -próximo de ;
(ii) -próximo de se ∈ () e não for -próximo de ;
(iii) é infinitamente distante de se ∈
( ( ) ∪ ())
Nota 9.4 Intuitivamente e estão -próximos se, a partir de se pode alcançar , com um número finito de saltos compostos por múltiplos ou submúltiplos
do segmento unitário. O sistema de todas as vizinhanças (, e ) dos pontos
de define uma topologia (ultramétrica) em .
Definição 9.17 (pontos separados) Numa reta sincopada , ∈ dizem-se
separados se ∈
()
É fácil ver que
Teorema 9.6 Os pontos standard de uma reta sincopada são separados dois a
dois.¤
Mais precisamente, tem-se:
Corolário 9.3 A reta sincopada é totalmente desconexa16 (do ponto de vista geométrico), ou seja, é um conjunto separado ou Hausdorff para a topologia referida
na nota 9.4.
Seja um segmento unitário (sincopado ou não) duma reta sincopada . Cada
ponto ∈ tem um campo , (), que pode estar ou não incluído em .
Têm-se as definições:
Definição 9.18 (campo dum segmento) Chama-se campo do segmento finito ou limitado ao segmento
() = ∪ () ∪ ()
Definição 9.19 (campo, campo dum segmento) Dado um segmento de reta
, numa reta sincopada , chama-se campo de ao segmento ∈ N e
nota-se () Chama-se campo de ao segmento e nota-se
()
Definição 9.20 (ponto interior) ∈ é ponto interior de se ( ) ⊂
Definição 9.21 (interior de um segmento) O interior de , () é o conjunto dos pontos interiores de .
16
No sentido standard ou da continuidade à Dedekind, obviamente.
212
Modelos sintéticos Hilbert-Veronesianos de GNSNA
Definição 9.22 ( segmento aberto) Um segmento diz-se aberto se =
(), isto é
[
=
( ) ∈
Definição 9.23 (segmento fechado) Numa reta , é fechado se e só se
é aberto.
Notemos que a definição de segmento fechado exige o mergulho do mesmo numa
reta, ao contrário da definição de segmento aberto.
No campo de um ponto pode-se recorrer às métricas habituais, incluindo a Euclidiana, a qual é baseada no conceito de congruência de segmentos, segundo Hilbert.
A nível global, numa reta ou num plano sincopado é necessário definir uma métrica
baseada no conceito de congruência de segmentos sincopados:
Definição 9.24 (unidade sincopada) Seja uma reta sincopada de unidade .
Uma unidade sincopada é um segmento sincopado , isto é, tal que () ∩
() = ∅sendo () e () gerados em pela unidade principal .
Nota 9.5 O termo unidade, sem mais qualificativos, será utilizado em relação à
unidade principal geradora da escala. A unidade principal pode ela própria ser sincopada mas, para efeitos de fixação de uma escala, convém que não seja considerada
sincopada.
Nota 9.6 Dada uma unidade , há infinitas maneiras escolher uma unidade sincopada na escala gerada por .
Definição 9.25 (distância na reta sincopada) Seja uma reta sincopada de unidade e unidade sincopada 0 , e ∈ A distância de a , é a função
( ) = 0 +
onde é a potência de e = − 0
Proposição 9.7 Seja d a função que associa a um par de pontos ( ) duma reta
sincopada , um número não negativo, d( ) tal que
i) d( ) = distância Euclidiana de a , se ∈ ( );
ii) d( ) = potência do segmento , se ∈
( ).
Então d( ) é uma distância, ultramétrica em .¤
Observemos que, como ( ) ⊂ ( ) pode ser ∈ ( ) (munido de distância Euclidiana) o que dá, nesse caso, ( ) = ≈ 0 Em particular, se = ,
( ) = 0. Por outro lado, se ∈
( ) é claramente ∈ ( ), donde é
nesse caso um segmento sincopado.
Suponhamos agora que se tem ∈ (), e ∈
( ). Tem-se então que
( ) = ( ) + ( )
9.3
Modelo da reta sincopada
213
As medidas das distâncias entre pontos não do mesmo campo e as de pontos
do mesmo campo são feitas em unidades diferentes. Assim, por exemplo, na figura
abaixo, designando as unidades das primeiras distâncias por 1 = e a unidade
sincopada por 2 = ,
Fig. 25. Distâncias na reta sincopada. Fonte: Autor.
tem-se: ( ) = 1 ; ( ) = 2 ;( ) = 1 − 22 ; ( ) = 1 + 42 ;
( ) = 42 e ( ) = 62
É claro que a unidade 2 é em relação a 1 pelo que, a escala finita (de unidade
sincopada), pode-se considerar
( ) ≈ ( ) ≈ ( ) ≈ ( )
e tem-se
∀ ∈ N 2 1
Observemos que o campo ( ) de um ponto em relação a uma dada unidade
é equivalente a uma “bola” de raio , finito (nessa unidade) centrada em qualquer
dos seus pontos. Por outro lado, o campo , ( ), é equivalente a uma bola de
raio , tendo sentido a equivalência:
( ) ↔ ( )
São válidas, para aqui, todas as consequências métricas, topológicas e geométricas de ser uma ultramétrica, vistas no 8. Como exemplo, tem-se a
Definição 9.26 (comprimento de um segmento) O comprimento de um segmento é o número ( ) e nota-se, como no precedente, ||.
Se for , então ( ) ≈ 0 e || é quase nulo em relação à unidade
adotada.
Nota 9.7 Notemos que:
i) O comprimento de um segmento só é um número real se não for sincopado. Caso contrário será um número “complexo” com unidades que representam
grandezas de mesma espécie, porém não comensuráveis.
ii) Em qualquer caso o comprimento de um segmento é um número não negativo.
214
Modelos sintéticos Hilbert-Veronesianos de GNSNA
9.3.4
Geometria plana
A seguir vamos, dum ponto de vista puramente descritivo, explorar alguns aspetos
da geometria do plano sincopado.
De notar que a estrutura do plano sincopado é inteiramente definida pelas unidades
de comprimento adotadas.
Seja dado, num plano sincopado um segmento unitário . Um ponto ∈
tem três campos planos, a saber:
– Campo Arquimediano, ( ) = { ∈ : ( ) = };
– Campo ,
( ) = { ∈ : ( ) = } = ( )17 ;
– Campo , ( ) = { ∈ : ( ) = } = ( )18
A questão do paralelismo coloca-se a dois níveis: o local e o global. Temos as
definições seguintes:
Definição 9.27 (paralelismo local) Num plano duas retas sincopadas ∈
são paralelas, no campo plano Arquimediano (respetivamente e ig) de um ponto
( ) = ∅ e ∩
( ) = ∅). Nesse
∈ se ∩ ( ) = ∅ (respetivamente ∩
caso nota-se
k (respetivamente k e k )
Se ∩ = { } então e são concorrentes em .
( ) então s é quase-concorrente com r em .
Se ∩
É claro que, no caso (2) está incluída a coincidência de com .
As figuras abaixo ilustram as situações:
Fig. 26. Posição relativa local de retas sincopadas. Fonte: Autor.
Sempre colocando-nos em , temos que no caso 1) não há intersecção de com
, no campo Arquimediano de pois nenhum ponto de pertence ao campo plano
de , pelo que k . No caso 2), apesar de ( ) ∩ 6= ∅ não existe nenhum
ponto ∈ ( ) tal que
() ∩ 6= ∅ pelo que se tem em ( ) k No
caso 3) temos que, no campo plano de , e são concorrentes em continuando
a ser k .
17
18
Halo plano no plano
Galáxia plana no plano
9.3
Modelo da reta sincopada
215
São pertinentes as seguintes observações:
(i) No caso de paralelismo 2) todos os pontos de ( ) são centros da bola
Arquimediana definida por . O mesmo acontece com todos os pontos de ∩ ( )
Assim, o significado da posição relativa das duas retas só é intuitivamente relevante,
à escala Arquimediana de .
(ii) No caso 3), a incidência de em ( ) é identificada por uma zona no interior
do campo Arquimediano de . Mas não há nenhum meio Arquimediano de localizar
com exatidão o ponto de intersecção. Contudo esse ponto existe pelos axiomas da
Geometria Absoluta, conjugados com a axioma de continuidade de Veronese.
(iii) Pelos axiomas da Geometria absoluta, se duas retas tiverem mais que um
ponto (standard) de intersecção então são coincidentes.
Sejam e duas retas intersetantes não coincidentes, isto é, com um único ponto
comum. Localmente o ponto de intersecção define em e em dois campos com
um único ponto comum, .
A questão da posição relativa global de duas retas sincopadas que têm, numa
escala fixada, um ponto comum, é equivalente ao problema das paralelas. Ora, a
questão das paralelas, no sentido global, toma a seguinte forma gráfica:
Fig. 27. Paralelismo local. Fonte: Autor.
se se aceitar o postulado euclidiano das paralelas segundo o qual, duas retas
e perpendiculares a um segmento finito19 () não se encontram num ponto
finito (formulação de Playfair). Suponhamos que e se encontram num ponto do
infinito, digamos . Se nos colocarmos em , com um segmento , tem-se
que é forçosamente 20 , e é globalmente concorrente com . Colocando-nos
em , com um , tem-se que é e k k
De fato, nesse caso, existem vários infinitos e a figura abaixo traduz bem a
19
Pode-se dizer que, em relação a uma escala fixada, um segmento é finito se ⊂ ( )
com standard.
20
Assim como todas as grandezas fora do campo de .
216
Modelos sintéticos Hilbert-Veronesianos de GNSNA
situação:
Fig. 28. Diversas possibilidades locais e globais de paralelismo. Fonte: Autor.
É evidente que:
i) Por um ponto exterior a uma reta sincopada pode passar um número
infinito de retas sincopadas paralelas a , pelo que o plano sincopado é globalmente
hiperbólico;
ii) Sendo e pertencentes a um mesmo campo, as retas e (figura acima)
são ambas paralelas a , quando se se coloca em (ou em ), o mesmo acontecendo
com todas as retas que passam por e por pontos desse campo.21
Considerando agora o caso em que o segmento é sincopado, tem-se, para ,
, em campos distintos:
Fig. 29. Caso de paralelismo. Fonte: Autor.
Colocando-nos na escala de ,22 tem-se um triângulo 4. Um paralelismo
21
Do ponto de vista intuitivo, duas retas paralelas nunca se encontram. O sentido dessa intuitividade é o Arquimedianismo. Isto é, numa classe arquimediana, duas retas paralelas nunca se
encontram.
22
A escala dum segmento -sincopado é uma escala com uma unidade -sincopada. Todos
os segmentos -sincopados gerados pela mesma unidade fundamental, são da mesma escala.
9.3
Modelo da reta sincopada
217
à escala ( k ) seria o caso da figura abaixo
Fig. 30. Caso de paralelismo. Fonte: Autor.
onde não há paralelismo local (isto é, no campo do ponto , por exemplo).
Resta analisar o caso seguinte caso:
Fig. 31. Caso de paralelismo. Fonte: Autor.
Neste caso há paralelismo à escala de (que é um segmento em relação a
qualquer unidade sincopada, , por exemplo), e quase-coincidência à escala de um
segmento sincopado qualquer.
Analisemos agora um pouco o caso dos triângulos no plano sincopado. Podemos
ter triângulos com segmentos apenas a uma escala ou unidade, (caso 1)), ou a várias
(duas) escalas (caso 2)), como na figura abaixo:
Fig. 32. Triângulos em escalas diferentes. Fonte: Autor.
218
Modelos sintéticos Hilbert-Veronesianos de GNSNA
A teoria Hilbertiana dos triângulos aplica-se tal qual a estes triângulos, quando se
usam as unidades seguintes: um segmento não sincopado (caso 1), ou um segmento
sincopado (caso 2).
Alguns triângulos com particular interesse, são:
Fig. 33. Triângulos multi-escala. Fonte: Autor.
Os triângulos 1 e 3 são impossíveis, por violarem a desigualdade ultramétrica.
A escala 1-sincopada, o triângulo 2 é isósceles e o triângulo 4 é quase-equilátero. O
triângulo da figura seguinte é quase-isósceles:
Fig. 34. Triângulo quase isósceles. Fonte: Autor.
Notemos que os ângulos da base do triângulo quase-isósceles são quase-congruentes
(a figura é enganadora)23 .
Quanto aos ângulos, no caso global, há a observar uma característica interessante
dos mesmos, nesta geometria, que é o fato de, muitas vezes se comportarem como os
23
Observemos que a noção de amplitude de um ângulo depende das escalas em uso.
9.3
Modelo da reta sincopada
219
ângulos lunares de F. Klein (capítulo 1). Com efeito, considere-se a figura abaixo:
Fig. 35. Ângulo multiescala. Fonte: Autor.
Consideremos o triângulo quase isósceles 4 de base . Quando se se
coloca em ou em , o quadrilátero ¤ que resulta da truncatura de 4
←→
por , tem todas as características de um triângulo, de “vértice” igual ao segmento
, . Assim, podemos considerar nesta geometria, uma nova figura geométrica:
um ângulo cujo “vértice” é um segmento :
∠
−→ −−→
Chamemos segângulo a uma tal figura geométrica, de lados e ( −próximo
de ). Digamos também que ∠ é o ângulo base de ∠ e o vértice.
Tal como os ângulos lunares de F. Klein, um segângulo tem duas partes: uma
parte que vamos denominar de parte linear, que é constituído pelo segmento
(vértice), notada 0 , e uma parte circular, igual ao ângulo base, notada 0 . Fica
= 0 + 0
onde “+” representa uma soma formal.
A comparação entre segângulos é feita com o auxílio da seguinte figura:
Fig. 36. Comparação de segângulos. Fonte: Autor.
220
Modelos sintéticos Hilbert-Veronesianos de GNSNA
Temos:
– Como ∠ ∠ considera-se que ∠¤ ∠¤ onde ¤ representa um segmento qualquer;
– Como , considera-se que ∠ ∠
Isto é: dados = 0 + 0 e = 0 + 0 tem-se ⇔ 0 0 ou (no caso de
ser 0 = 0 ) 0 0
Tal como para os ângulos lunares, a soma faz-se naturalmente
= (0 + 0 ) + = ( 0 + 0 ) =
= (0 + 0 ) + (0 + 0 )
É óbvio que os segângulos do tipo = 0 + 0 são em relação a todos os outros.
O par (S +), onde S é o conjunto dos segângulos do tipo definido acima, e + é
a operação definida acima, é um grupo ordenado Não-Arquimediano, de elemento
neutro igual ao segângulo ∠0 = 0 + 0
Resta apenas referir que um segângulo pode ser representado graficamente como
nas figuras abaixo, o que mostra a sua semelhança com os ângulos lunares
Fig. 37. Segângulos. Fonte: Autor.
Para o caso das circunferências fixemos uma unidade . Uma circunferência
C de raio , admite como centro todos os pontos do interior de C. Com efeito,
qualquer que seja ∈ C tem-se
( ) = =
onde ∈ C
Fig. 38. Fonte: Autor.
9.3
Modelo da reta sincopada
221
Na figura acima estão esquematizadas 4 circunferências (3 “lisas” e uma “sinusoidal”) de centro em todos os pontos do campo plano de . Cada ponto do campo
de pertence a pelo menos uma circunferência de centro no campo de e raio
igual ao comprimento de um segmento.
Finalmente, tem-se o
Teorema 9.7 A geometria das retas -sincopadas é um modelo dos axiomas HV1HV15.
Dem. A demonstração da satisfação dos axiomas Hilbertianos, HV1-HV13,
decorre da equivalência deste modelo ao V de Veronese, que os satisfazem. A
satisfação dos axiomas de continuidade de Veronese, HV14 e HV15 decorre do fato
de existirem várias (infinitas) ordens de infinitesimais.¤
9.3.5
Aplicação: um exemplo da teoria Não-Arquimediana
das áreas planas (Hilbert)
Para ver o exemplo precisamos proceder à breve revisão de alguns conceitos:
Definição 9.28 (interior de um subconjunto do plano) Um ponto está no
interior de um subconjunto de um plano se existe um triângulo ∆ inteiramente contido em , com ∈ ∆ O conjunto dos pontos interiores de é o
interior de e nota-se ( ).
Tal como na topologia, definem-se exterior e fronteira de um subconjunto do
plano.
Definição 9.29 (subconjuntos do plano sem sobreposição) Dois subconjuntos
e de um plano são sem sobreposições se
( ) ∩ () = ∅
Definição 9.30 (figura) Uma figura geométrica ou simplesmente uma figura, é um
subconjunto do plano que pode ser expresso como uma união finita de triângulos sem
sobreposição.
Proposição 9.8 i) A intersecção finita de figuras é uma figura;
ii) A união finita figuras é uma figura;
iii) O complemento duma figura noutra, mais a fronteira, é uma figura.¤
Definição 9.31 (equidecomponibilidade) Duas figuras 0 são equidecomponíveis se for possível expressá-las como uniões de triângulos sem sobreposições
G
=
0 =
G
0
onde, para cada , o triângulo é congruente com o triângulo 0
222
Modelos sintéticos Hilbert-Veronesianos de GNSNA
Definição 9.32 (figuras com igual conteúdo) Duas figuras 0 têm igual conteúdo se existirem duas figuras 0 tais que:
i) e são sem sobreposições;
ii) 0 e 0 são sem sobreposições;
iii) e 0 são equidecomponíveis;
iv) ∪ e 0 ∪ 0 são equidecomponíveis.
Proposição 9.9 Se e são equidecomponíveis então têm igual conteúdo.¤
Se = 1 ∪2 1 ≡ 2 num plano euclidiano, e 0 um quadrado construído sobre
a diagonal de um dos quadrados de 1 ou 2 , então e 0 são equidecomponíveis.
Com efeito, se cortarmos e 0 em quatro triângulos congruentes entre si e com os
quatro triângulos definidos pelo corte do quadrado maior pelas suas diagonais.
Fig. 39. Ilustração de polígonos equidecomponíveis. Fonte: Hilbert [50].
Exemplo 9.7 (Euclides) Num plano euclidiano, sejam ¤ e ¤ dois
paralelogramos com a mesma base . Euclides demonstrou (Prop. 35, livro I)
que ¤ e ¤ têm o mesmo conteúdo. Com efeito seja = ¤
e 0 = ¤ Faça-se = 0 = 4 Então + e 0 + 0 são uniões
de triângulos congruentes 4 e 4 , e os triângulos 4 e 4, que
são congruentes:
Fig. 40. Paralelogramos com o mesmo conteúdo. Fonte: Hilbert [50].
Exemplo 9.8 (Hilbert) Se duas figuras e 0 são equidecomponíveis, então têm
igual conteúdo, mas a recíproca não é necessariamente verdadeira. Por exemplo,
considere-se o plano Cartesiano sobre um corpo Não-Arquimediano . Seja
9.4
Conclusões
223
um elemento de . Considere-se o quadrado unitário ¤ e o paralelogramo de base e lado superior , onde = ( 1) e = ( + 1 1). De acordo
com o exemplo 9.3.5, ¤ e ¤ têm igual conteúdo. Contudo, não são
equidecomponíveis. Com efeito, os lados de qualquer
triângulo contido no quadrado
√
unitário tem comprimento igual ou inferior a 2 Qualquer número infinito desses
lados, colocados topo a topo, seria
√ ainda finito no corpo . Mas o lado do paralelogramo tem comprimento 2 + 1 que é infinito. Portanto nenhum número
finito de triângulos contidos em ¤ pode “encher” o paralelogramo ¤ .
Fig. 41. Paralelogramos não equidecomponíveis. Fonte: Hilbert [50].
Exemplo 9.9 O exemplo (9.3.5) pode ser considerado no quadro da geometria sincopada. Ficaria assim:
Fig. 42. Paralelogramos não equidecomponíveis. Fonte: Autor.
Nesta figura é evidente que o argumento de Euclides não é válido pois os triângulos e não são congruentes, pois, por exemplo, não é congruente
com .24
9.4
Conclusões
No capítulo anterior apresentámos um modelo analítico H-V que privilegiava os
aspetos micro da GNSA. Os modelos apresentados neste capítulo privilegiam os
aspetos macro, reduzindo à escala de uma folha de papel, retas, segmentos de comprimento infinito, circunferências de raio infinito, etc. Os resultados são fundamentalmente os mesmos, nestes dois pontos de vista.
24
São apenas quase-congruentes, o que tem grande impacto a duas escalas, em particular na
medida da área em questão.
224
Modelos sintéticos Hilbert-Veronesianos de GNSNA
Finalmente, refiramo-nos que o modelo da reta sincopada pode representar, com
muita fidelidade, algumas situações em biologia, por exemplo, em particular nas
cadeias evolutivas. Tomemos como exemplo a evolução do macaco (ponto ) ao
Homem (ponto ). Um segmento sincopado representaria essa cadeia de
evolução, em que a síncope representa o elo ausente, característico das cadeias
evolutivas. Com efeito, o descendente de é também (está ainda na classe
Arquimediana de ) e o antecedente de é ainda . Passar da classe Arquimediana de para a classe de , na mesma reta ordenada, implica “um salto no vazio”,
isto é, ultrapassar uma síncope.25
Continuando com as mesmas espécies, e , sabe-se que a distância entre
espécies costuma-se definir como o número de gerações a partir do mais recente
antepassado comum. Essa distância é ultramétrica, como a distância definida na geometria das árvores, o que explica, por exemplo, certas semelhanças (em património
genético, por exemplo) entre entidades de espécies aparentemente muito diferentes.
Assim, a geometria das árvores (apenas referida neste trabalho - 1) é uma GNS.
25
Ou alternativamente, a consideração de transformações infinitesimais: o descendente imediato
do macaco não é apenas macaco ou não é tão macaco, quanto o seu progenitor. A consideração
de modificações infinitesimais na cadeia evolutiva elimina a necessidade da ideia de “elo ausente”.
CAPÍTULO 10
Um modelo métrico Birkhoffiano
de GNSNA
10.1
Introdução:
Sabe-se que G.D. Birkhoff [10] desenvolveu uma axiomática alternativa à de Hilbert
para a Geometria Euclidiana, designada por Geometria Métrica, fundada em dois
pressupostos:
– A estruturação do conjunto dos números reais R como corpo ordenado e
completo1 , (R + 0 1);
– O enriquecimento dos modelos Hilbertianos ( ) de incidência com funções
reais especiais.
10.2
Os axiomas de Birkhoff
Com vista à elaboração de um Modelo Não-Standard da Geometria Métrica de
Birkhoff, vamos rever os axiomas e alguns resultados dessa geometria, também para
a fixação do método e das notações. Vamo-nos cingir aos axiomas I1-I3 (axiomas
planares de incidência), que passam a integrar o grupo de axiomas de Birkhoff para
a Geometria Não-Standard Não -Arquimediana plana serão representados por Ai2 :
A1 ↔ 2
A2 ↔ 1
A3 ↔ 3
Os restantes axiomas são introduzidos a seguir:
1
No sentido de Dedekind.
Vai-se recorrer a uma versão ligeiramente modernizada dos axiomas de Birkhoff, presente em
Franco Oliveira ([33], [34]), P. Araújo ([71]), Millman &Parker([55]), e outros.
2
225
226
Um modelo métrico Birkhoffiano de GNSNA
A4. (Axioma da distância, da régua, ou da medição linear) Para cada reta de
um plano existe, pelo menos uma bijeção : → R tal que para quaisquer pontos
de se tem
( ) = | | = | − |
onde é uma função distância definida por
: 2 → R
( ) 7→ ( ) = | |
Pode-se demonstrar, baseando-se no axioma A4, que verifica as propriedades
usuais das funções distância, a saber:
D1 − ( ) ≥ 0 , ∀ ∈ (não negatividade);
D2 − ( ) = 0 ⇔ = (anulamento);
D3 − ( ) = ( ) (simetria);
D4 − ( ) ≤ ( ) + ( ) (desigualdade triangular).
A5 (separação no plano) Para toda a reta , o conjunto de pontos de um plano
que não pertencem a é a reunião de dois conjuntos convexos3 , não vazios e
disjuntos, tais que, para quaisquer pontos ∈
está num deles e está no
outro, se e só se corta .
A6 (Axioma do transferidor) Sejam pontos distintos, H um semiplano
←→
limitado pela reta . Então para todo o ∈]0 180[ existe uma única semirreta
−→
, com ∈ H tal que (∠ ) = ] =
A7 Se ∈ (∠) então (∠) = (∠) + (∠) onde
(∠ ) é o interior de ∠
A8 Se ∠ e ∠ são suplementares adjacentes (isto é, − − e
∈
) então (∠) + (∠) = 180
Nota 10.1 Os axiomas A6-A8 são geralmente chamados axiomas da medição angular.
A9 (Axioma da congruência de triângulos: critério ) Nos triângulos 4
e 4 se a correspondência ↔ ↔ ↔ for tal que ≡
∠ ≡ ∠ ≡ então 4 ≡ 4
Encontramo-nos, portanto, perante modelos da forma
M = ( )
onde:
– é a função distância ou métrica definida acima;
– é a função real de medição angular definida acima.
Observemos que na Geometria Métrica, a continuidade linear (e por extensão, a
circular) é assegurada pela continuidade Dedekindiana do conjunto R, via o isomorfismo introduzido no axioma A4, não sendo portanto necessário postular nesse
sentido.
3
Definição geométrica: C é um conjunto convexo sse ∀ ∈ C ⊂ C
10.2
Os axiomas de Birkhoff
227
Definição 10.1 (coordenada de um ponto) Para todo ponto ∈ ( ) =
(que existe sempre graças a A4) diz-se a coordenada de em .
Usualmente identifica-se um ponto com a sua coordenada .
Existem muitos sistemas de coordenadas para cada reta. De fato tem-se a
Proposição 10.1 Seja um sistema de coordenadas para uma reta . Então:
i) A função : → definida por ( ) = − ( ), para todo o de , é um
sistema de coordenadas de ;
ii) Qualquer que seja o número ∈ a função : → definida por ( ) =
( ) + para todo o de é um sistema de coordenadas de .¤
Teorema 10.1 (de colocação da régua) Para qualquer reta e quaisquer pontos
distintos incidentes em existe um e um só sistema de coordenadas para tal
que a coordenada = 0 e a 0.
Dem. Seja um sistema de coordenadas para , que existe por A4. Ponhamos
= (), e definamos, para todo o ponto incidente em , ( ) = ( ) − . Pela
proposição anterior, é um sistema de coordenadas para . Se () 0 acaba-se
a demonstração. Se () 0 considere-se o sistema de coordenadas (proposição
10.1) definido por ( ) = −( ). está nas condições requeridas.¤
Definição 10.2 (congruência de segmentos) Dois segmentos , dizemse congruentes, e escreve-se, como nos capítulos anteriores, ≡ , se e só se
|| = ||.
Com base nesta definição, podem-se demonstrar as propriedades da congruência
de segmentos, admitidas por Hilbert como axiomas.
As principais consequências do axioma de separação (A5) são os seguintes resultados:
Teorema 10.2 (de Pasch) Qualquer reta que intersecte um triângulo num ponto
do interior a um lado, intersecta, pelo menos, um dos outros lados.¤
Teorema 10.3 (da barra transversal) Uma semirreta com origem no vértice de
∠ passando por um ponto interior ao ângulo, corta o lado num ponto entre
os extremos.¤
Teorema 10.4 Se uma reta tiver um ponto no interior de um triângulo, então ela
corta algum dos lados.¤
Exemplo 10.1 Considere-se o seguinte modelo: 1 = ( R R R ) onde R é o
plano Cartesiano real, R = {( ) ∈ R2 : = 1 ∨ = 2 1 2 ∈ R}4 e R é
a distância definida, para dois pontos (1 1 ) (2 2 ) ∈ R por
½
|1 − 2 | ⇐ 1 = 2
R ( ) =
|1 | + |2 | + |1 − 2 | ⇐ 1 6= 2
4
Isto é, as retas do modelo são reuniões de duas retas Euclidianas horizontais.
228
Um modelo métrico Birkhoffiano de GNSNA
isto é, a distância entre e é a Euclidiana, se e estiverem na mesma
horizontal = 1 = 2 , e soma-se o comprimento do caminho de a , passando
pelo eixo das ordenadas, no caso de e de não estarem na mesma horizontal.
É claro que 1 verifica os axiomas A1 − A3. Também é imediato que 1 verifica
A4 Com efeito, sendo ∈ R , a função
: →R
( ) 7→ R ( )
onde R ( ) é a métrica definida acima, é um sistema de coordenadas, para .
Tem-se a ilustração:
Fig. 43. Modelo de Geometria Métrica. Fonte: Autor.
Proposição 10.2 O modelo 1 é hiperbólico.
Dem. Com efeito, sendo (3 3 ) ∈ R 3 6= 1 2 tem-se que existe um número
←→
infinito de retas que passam por e são paralelas a = São as retas do tipo
0 = {( ) ∈ R : 6= 1 2 ∨ = 3 }
¤
Definição 10.3 (ângulos congruentes) Os ângulos ∠ e ∠ são congruentes se tiverem a mesma amplitude, isto é ] = ]
É evidente que um modelo desta geometria é o plano Cartesiano real.
10.3
Réguas e transferidores Não-Standard
10.3.1
Modelo geral Métrico Não-Standard
Um modelo métrico Birkhoffiano de Geometria Não-Standard Não-Arquimediana, é
fundado nos pressupostos:
– A existência de um conjunto de números R estruturado como corpo ordenado
Não-Arquimediano, contínuo no sentido de Veronese, (R + 0 1);
10.3
Réguas e transferidores Não-Standard
229
– O enriquecimento dos modelos Hilbertianos de incidência ( ) com funções
especiais, pertinentes ao novo contexto.
O nosso modelo não-standard vai basear-se em axiomas Birkhoffianos, devidamente adaptados, a serem designados por A0 i. Tem-se
A0 1 = A1
A0 2 = A2
A0 3 = A3
Para o axioma A0 4, tem-se
A0 4. (axioma da régua não-standard ou da ultra-métrica) Para cada reta de
um plano , existe, pelo menos, uma bijeção
: → R
tal que, para quaisquer pontos de se tem:
( ) = | | := | − |
onde é uma função ultra-distância ou ultra-métrica definida por
: 2 → R+
0
( ) 7→ ( ) = | |
que verifica os axiomas D 1 – D 3 acima (secção 10.2), mais o seguinte axioma
D 04 ( ) ≤ max{( ) ( )}(ultramétrica);
Os restantes axiomas são iguais, a menos de consequentes adaptações (sobretudo
nos axiomas A6 e A7), como se verá na sub-seção seguinte:
A0 5
A0 6
A0 7
A0 8
A0 9
←→
←→
←→
←→
←→
A5
A6
A7
A8
A9
Os modelos métricos de Geometria Não-Standard são da forma
M = ( )
onde é uma função real de medição angular, isto é, : → R que obedece a
uma axiomática específica, e é a função ultradistância definida acima.
Tal como no caso standard, na Geometria Métrica Não-Standard, a continuidade
linear (e por extensão, a circular) é assegurada pela continuidade (Não-Arquimediana)
do conjunto R, via o isomorfismo , não sendo portanto necessário postular nesse
sentido. Neste caso trata-se de continuidade Não-Arquimediana.
230
Um modelo métrico Birkhoffiano de GNSNA
10.3.2
Principais consequências de 0 1 a 0 8
Definição 10.4 (sistema de coordenadas ) A função do axioma A0 4 chamase um sistema de coordenadas não standard (s.c. ) para .
Teorema 10.5 (colocação da régua não-standard) Para qualquer reta e quaisquer pontos distintos , de , existe um e um só s.c. tal que
= 0 ∧ 0
Dem. Idêntica à do teorema 10.1.¤
Definição 10.5 (segmentos quase-congruentes) Os segmentos e dizemse quase-congruentes, e escreve-se ∼
= se e só se || ≈ ||
Os axiomas 0 6 a 0 8 são de medição angular não-standard. Antes da sua
introdução, é preciso ver o conceito primitivo de medição angular, a acrescentar aos
anteriores (ponto, reta e distância):
Definição 10.6 (medição angular) Sendo A o conjunto dos ângulos geométricos,
uma medição angular é uma função
: A →]0 180[⊂ R
∠ 7→ (∠) = (∠) = ]
onde R é um corpo ordenado Não-Arquimediano, contínuo no sentido de Veronese.
A0 6 (Axioma do transferidor não-standard) Sejam pontos distintos, H um
←→
semiplano limitado pela reta . Então para todo o ∈]0 180[⊂ R existe uma
−→
única semirreta , com ∈ H tal que (∠ ) = ] =
Nota 10.2 Por ser ∈ R existem ângulos com medida angular infinitamente
pequena.
Definição 10.7 (ângulo ) Um ângulo ∠ diz-se se ] ≈ 0
A0 7 Se ∈ (∠) então (∠) = (∠) + (∠) onde
(∠ ) é o interior de ∠
Nota 10.3 O axioma de Arquimedes não é verificado pois, se ∠ é e ∠
não , não existe ∈ N tal que (∠) ∠
Definição 10.8 (ângulos quase-congruentes) Os ângulos ∠ e ∠ dizemse quase-congruentes, e nota-se ∠ ∼
= ∠ se for ] ≈ ]
10.3
Réguas e transferidores Não-Standard
231
Teorema 10.6 (construção de segmentos e de ângulos) (a) Dados um segmento
−−→
−−→
e uma semirreta , existe um único ponto ∈ tal que ∼
=
−−→
←→
(b) Dados ∠, uma semirreta e um semiplano H limitado por ,
−−→
existe uma única semirreta com ∈ H tal que ∠ ∼
= ∠
←→
(c) Dados os números ∈ tais que 0, 0 180 uma reta = e
um semiplano H limitado por , existe um único ponto ∈ H tal que ] ≈
e || ≈
←→
Dem. (a) Seja um s.c. Não-Arquimediano para e 0, de modo que
−−→
−−→
= { : ≥ 0} (teorema 10.5). Tem-se então, para todo o ponto ∈
| − | = || = = || Pondo = || como é bijetiva, existe um
−−→
único ponto ∈ tal que = = || = || logo ∼
=
−−→
(b) Pondo = ] pelo axioma A0 6, existe uma única semirreta , com
∈ H tal que ] = donde ∠ ∼
= ∠
(c) Corolário de (a) e (b).¤
Definição 10.9 (ângulo quase-reto) Um ângulo ∠ é quase-reto se ] ≈ 90
Definição 10.10 (retas quase-perpendiculares) Duas retas e dizem-se quaseperpendiculares, e escreve-se ⊥ (como anteriormente) se e só se forem concorrentes e existir um ângulo quase-reto contido em ∪ .
Nota 10.4 A definição pode ser formulada em termos de túbulos: ⊥ se para
ips, ⊂ e ⊂ se tem ⊥
10.3.3
Exemplos de realizações do modelo
Exemplo 10.2 Consideremos o seguinte modelo: M1 = ( R R R ) onde R é
o plano Cartesiano real, R = {( ) ∈ R2 : = 1 ∨ = 2 1 2 ∈ R} e R é
a ultradistância definida, para dois pontos (1 1 ) (2 2 ) ∈ R por
R ( ) =
½
|1 − 2 | ⇐ 1 = 2
+ |1 − 2 | ⇐ 1 6= 2
isto é, a distância entre e é a Euclidiana, se e estiverem na mesma
horizontal = 1 = 2 , e soma-se um infinitamente grande, fixo, no caso de não
estarem na mesma horizontal5 .
5
O que é equivalente a considerar a distância conhecida
( ) = |1 − 2 | + |1 − 2 |
(métrica da soma), considerando que, se e não estão na mesma horizontal, |1 − 2 | =
232
Um modelo métrico Birkhoffiano de GNSNA
Evidentemente, M1 verifica os axiomas A0 1 − A0 3. Também é imediato que M1
verifica A0 4 Com efeito, sendo ∈ R , a função
: →R
( ) 7→ R ( )
onde R ( ) é a ultramétrica definida acima, é um sistema de coordenadas nãostandard, para . A figura abaixo ilustra este modelo:
Fig. 44. Modelo Não-Arquimediano de Geometria Métrica. Fonte: Autor.
que se pode interpretar assim:
Fig. 45. Interpretação do Modelo Não-Arquimediano de Geometria Métrica.
Fonte: Autor.
onde o traço “gordo” representa um “segmento ” de para , que adicionado
ao segmento de comprimento finito (a tracejado), resulta no segmento “misto”
.
Nota 10.5 Na figura acima são colineares.
Tem-se a seguinte
Proposição 10.3 O modelo M1 é hiperbólico.
Dem. Como na proposição 10.2.¤
10.3
Réguas e transferidores Não-Standard
233
Nota 10.6 (1) Este modelo pode ser modificado de modo que as retas verticais
desempenhem o mesmo papel que as horizontais.
(2) Para retas oblíquas = + , basta definir a ultramétrica
½
| − | ⇐ ∈ { = + }
R ( ) =
+ | − | ⇐ ∈ { = 1 + 1 } ∈ { = 2 + 2 }
onde é um sistema de coordenadas para = {( ) ∈ R : = + }. Neste
caso considera-se que |1 − 2 | =
Exemplo 10.3 Trata-se de uma generalização do modelo anterior. Seja ∈ N
fixo. Consideremos o seguinte modelo: M2 = (R R R ) onde R é o plano
Cartesiano real, R = {( ) ∈ R2 : = 1 ∨ = 2 } e R é a ultradistância
definida, para dois pontos (1 1 ) (2 2 ) ∈ R2 por
½
|1 − 2 | ⇐ 1 = 2
R ( ) =
( + 1) + |1 − 2 | ⇐ 1 6= 2
isto é, a distância entre e é a Euclidiana, se e estiverem na mesma
horizontal, e soma-se um infinitamente grande, ( + 1), onde é o número de
retas horizontais entre a reta horizontal onde está , e a reta horizontal onde está
, no caso de não estarem na mesma horizontal.
É claro que também M2 verifica os axiomas A0 1 − A0 3. Também é imediato que
M2 verifica A0 4 Com efeito, sendo ∈ R , a função
: →R
( ) 7→ R ( )
onde R ( ) é a ultramétrica definida acima, é um sistema de coordenadas para
. A figura abaixo ilustra este modelo:
Fig. 46.Modelo Não-Arquimediano de Geometria Métrica generalizado. Fonte:
Autor.
Nota 10.7 (1) Se não for fixo, não se garante que o modelo M2 cumpre o axioma
A0 1 Com efeito, designemos por ( ) a reta definida por , isto é, constante
das horizontais de e , mais horizontais entre elas. Então pode-se definir uma
linha ( ) 6= que passa pelos pontos , mas é diferente de ( ). Em
particular, não pode ser infinito.
(2) Aplica-se o mesmo da nota (2) anterior.
234
Um modelo métrico Birkhoffiano de GNSNA
Exemplo 10.4 O plano Cartesiano Não-Arquimediano é um modelo desta geometria.
Para concluir a descrição do modelo, tem-se o
Teorema 10.7 Seja R um conjunto de números Veronesianos (isto é, com ips de
várias ordens de grandeza), uma reta munido de um s.c. : → R Então a
geometria métrica resultante é um modelo dos axiomas HV1-HV15.
Dem. A verificação dos axiomas Hilbertianos HV1-HV13 decorre da construção
do modelo. A verificação dos axiomas Veronesianos de continuidade HV14 e HV15,
decorre do sistema de coordenadas adotado.¤
10.4
Novas noções
Tal como no capítulo 8, a linguagem é aqui enriquecida através de predicados nãostandard, o que se obtém facilmente através do sistema de coordenadas não-standard
:
Definição 10.11 (pontos -próximos) ∈ dizem-se -próximos se
( ) = | | =
Definição 10.12 (segmento ) Dados ∈ o segmento diz-se se
e são -próximos.
Definição 10.13 (segmento ) Dados ∈ o segmento diz-se se
| | =
Exemplo 10.5 No exemplo 10.2, se e estão na mesma horizontal, o segmento
tem como comprimento um número real, não . No caso de ser e pertencentes a horizontais diferentes, o segmento é .
10.5
Conclusões
No presente capítulo procedemos a uma fundamentação Birkhoffiana da Geometria
Não-Standard Não-Arquimediana. O modelo obtido permite chegar aos mesmos
resultados que o modelo analítico Hilbertiano visto anteriormente, no capítulo 8.
A introdução de um sistema de coordenadas não-standard permite de forma direta
introduzir na reta uma estrutura não-standard, e aplicar os resultados pertinentes
da ANS à GNSA.
Pelas mesmas razões que Birkhoff, mais o grupo SGS, introduziram os modelos
métricos de geometria no estudo da Geometria Euclidiana Arquimediana clássica,
a saber, a necessidade de não requerer um pesado aparato lógico para se estudar
10.5
Conclusões
235
a Geometria associado à criação de um corpo numérico por via de uma álgebra
de segmentos, como fizeram Veronese, Hilbert e seus predecessores, a começar pelo
próprio Euclides, há muitas vantagens em se adotar a geometria métrica dando
por construído o corpo numérico de base. Com essa atitude postula-se uma maior
concentração no desenvolvimento da intuição geométrica durante a formação e investigação na área. Ora, corpos Não-Arquimedianos já existem, rigorosamente fundamentados e à disposição dos geómetras!
236
Um modelo métrico Birkhoffiano de GNSNA
Parte IV
Discussão e conclusões
237
CAPÍTULO 11
Discussão e conclusões
Com esta investigação são lançadas algumas bases para a consideração de geometrias
com elementos não-standard, no sentido considerado no capítulo 5, e no sentido NãoArquimediano.
Através de exemplos, mostramos que:
– Tais geometrias podem ser consideradas de um ponto de vista muito elementar, com vantagens didáticas e pedagógicas evidentes;
– Ajudam a resolver problemas geométricos convencionais através de métodos
muito elementares.
As interpretações de tais geometrias, prevalecentes neste trabalho, foram as geometrias Não-Arquimedianas.
No âmbito da GNS desenvolvida nesta investigação, fizemos uma revisão histórica,
de onde aproveitámos, para a construção de modelos e suas aplicações, os contributos
de Veronese, Hilbert e outros. Especial destaque foi para os ângulos de contingência
que, por um lado, encerram todo o paradigma do assunto central da investigação,
e por outro lado apresentam espantosa utilidade na intuição da Geometria NãoArquimediana das curvas. Também é de se referir a revisão da construção pela via
sintética dos números de Veronese, que representam em muitos momentos da investigação as grandezas numéricas em utilização, sobretudo quando se recorre a ordens
de grandeza relativas – é o caso do capítulo 9.
Uma definição de Geometria Não-Standard foi necessária, até como forma de
objetivar para melhor delimitar a área de estudo. A não existência de classificação
AMS para essa matéria é indicador da sua não autonomia em relação à Geometria,
para se dizer o mínimo. A definição encontrada é bastante vasta e acaba também
por extravasar o espírito que presidiu à terminologia "Análise Não-Standard: na
GNS, tal como na ANS, são caracterizados entes não definidos nas geometrias construídas com recurso à linguagem ZFC da teoria dos conjuntos. Mas na GNS essa
caracterização pode-se traduzir na introdução de objetos geométricos novos, o que
não acontece (porque não necessário) na Análise. Onde há maior afinidade entre a
GNS e a ANS é na GNSA. Assim, e porque era necessário restringir a área de investigação, dedicámos a investigação, a partir do capítulo 5 à Geometria Não-Standard
Não-Arquimediana.
239
240
Discussão e conclusões
Aproveitámos as bases universais da fundamentação da Geometria, legadas por
Hilbert (os três primeiros grupos de axiomas – aquilo que neste texto designámos
por Geometria Absoluta) e os axiomas de continuidade de Veronese (compatíveis
com os referidos axiomas de Hilbert) para a construção de um modelo de Geometria
Não-Arquimediana denominada Hilbert-Veronesiano, que descreve geometrias que
podem ser totalmente desconexas do ponto de vista da continuidade Dedekindiana,
mas contínuas no sentido Veronesiano.
Construímos três realizações do modelo, a saber: uma analítica na mais estrita tradição Hilbertiana, uma sintética, inspirada num modelo de Veronese e um
métrico, resultante da adaptação dos axiomas de Birkhoff ao caso Não-Arquimediano
(réguas e transferidores não-standard). O modelo analítico é aquele que serve para
derivar as principais propriedades geométricas e topológicas do plano Cartesiano
Não-Arquimediano. Nesse modelo são mais evidentes as propriedades à escala micro.
O principal modelo sintético, denominado, da reta sincopada, para além de confirmar as propriedades derivadas no modelo analítico, evidencia, de forma intuitiva as
propriedades à escala macro. Este modelo pretende desenvolver a Geometria NãoStandard sintética de forma tão natural e elementar quanto a geometria de Euclides
ou a de Hilbert. Tentamos esse desiderato através da introdução de um conceito de
congruência compatível com a existência de várias escalas, o que intuitivamente não
é muito evidente. Embora não exibamos mais que um exemplo de aplicação imediata
do modelo para a ilustração da resolução de um problema clássico, de uma forma
natural e imediata, acreditamos que o referido exemplo constitui um paradigma das
situações onde a aplicação do modelo é imediata, portanto, vantajosa.
No modelo Birkhoffiano, confirmam-se de novo as propriedades vistas no modelo analítico, e avançamos algumas realizações simples, aparentemente suficientes
para caracterizar a diferença de oportunidades de aplicação em relação ao modelo
analítico.
Os exemplos de problemas resolvidos são escassos e elementares, mas têm um
caracter apenas indicador. Mais não foi feito dado o contexto de tese em que a
investigação foi desenvolvida: a gestão do tempo torna-se crucial.
O trabalho apresentado está incompleto. Mantivemos um nível (bastante) elementar nos resultados, ilustrações e aplicações, remetendo-se qualquer aprofundamento para estudos posteriores. Como dissemos o prefácio, é agora necessário
empreender um trabalho de finesse para completar o trabalho de géométrie.
Apesar de todos os esforços empreendidos, sentimos que a linguagem muitas
vezes é densa e nalguns casos pouco clara face à linguagem moderna. Muito disso é
devido à natureza da própria matéria e à fidelidade que quisemos manter em relação
as autores clássicos estudados.
A opção por várias abordagens (a histórica, a analítica, a métrica, a sintética) é
bastante discutível na medida em que é a principal causa do alongamento do texto,
por um lado, e por outro, acreditamos que se os esforços tivessem sido concentrados
em apenas uma ou duas abordagens, certamente se poderíamos ter ido mais longe na
exploração de certas consequências. Essa opção só é justificada por este se tratar de
um trabalho de fundamentações, que pretende, tão somente exibir alguns horizontes
241
para trabalhos futuros.
No decorrer deste projeto de investigação, muitos problemas se colocaram e
muitas perspetivas de continuidade da investigação se afiguraram. Entre essas
questões encontram-se as seguintes:
1. O ato intelectual básico que se encontra na fundação do pensamento geométrico parece ser o da associação abstrata entre dois objetos (ato que está, de
resto, associado à intuitividade básica do conceito de conjunto). Será possível fundar a geometria em axiomas que apenas regulam essa intuitividade básica, isto é,
que apenas regulam essa associação abstrata?
2. A liberdade de criação e de interpretação artísticas é uma das qualidades
inerentes à mente humana. Tratam-se de atividades altamente complexas. Pode-se
fundar a Geometria, prevendo essa liberdade e essa complexidade?
3. É possível fornecer a um computador um conjunto de axiomas de carácter
geométrico1 e pedir-lhe que crie objetos obedecendo aos mesmos? Que relações
geométricas se pode esperar existir entre tais objetos? Pode o computador minerar
essas relações e enunciá-las em forma de teoremas?
4. A Física necessita, mais que nunca, de geometrias (simples) que lhe permitam
interpretar as suas grandes questões, entre as quais, a da grande unificação. Pode
a Matemática construir tais geometrias? Uma interpretação geométrica simples
da teoria quântica (à semelhança do que já existe para a teoria da relatividade
geral) tem sido reputada de necessária2 . Uma geometria para tal fim teria que ser
necessariamente Não-Arquimediana.
5. Muitos matemáticos defenderam que o ponto não faz parte do contínuo (empírico) mas que é apenas uma estrutura auxiliar para poder utilizar esse contínuo
na matemática. É possível definir o ponto como uma estrutura sobre o contínuo,
(como um corte, por exemplo) em vez do contrário, as estruturas do contínuo serem
definidas através de pontos?
6. A definição Kleiniana de Geometria baseia-se no conceito de ação de um grupo
(de simetrias) num conjunto (de pontos). Uma tarefa futuramente é a elaboração
de um modelo de GNS baseada nessa definição, desenvolvendo a tímida introdução
ao assunto apresentada no capítulo 5.
7. Proceder à formalização das Geometrias Não-Standard, no seu sentido abstrato.
Para todas estas questões iniciámos o estudo, e nalguns casos, a construção de
modelos, cujo acabamento estão adiados pelas razões explicadas no prefácio.
8. A obra de Veronese é vasta e difícil de descodificar, em parte devido à complexidade da matéria que trata, mas também por causa do estilo que adotou. Na
presente investigação apenas sondamos alguns aspetos, em particular, a construção
do corpo numérico, e uma tímida introdução à Geometria. É nossa intenção continuar a explorar os Fondamenti, aprofundando aspetos como a Geometria projetiva
1
Nalgum sentido matemático do termo “geométrico”.
Existem divulgações que indicam que está em curso, uma interpretação através da teoria da
informação [Science & Vie].
2
242
Discussão e conclusões
e a geometria -dimensional sintética, entre tantos outros que se reveste de muito
interesse.
9. Túlio Levi-Civita nasceu como geómetra sob as batutas de Ricci e Veronese.
Certamente, na sua criação fecunda da teoria das conexões, teria tido influências
da intuição do espaço Não-Arquimediano, incluindo as de pontos standard e nãostandard. Uma das tarefas a serem encetadas no futuro é a revisita da geometria
diferencial através de conceitos não-standard.3
10. Por outro lado, a Geometria Não-Comutativa dos Números 4 , tencionamos
desenvolver atividade investigativa nessa área, com vista a procurar uma compreensão unitária das geometrias Não-Arquimedianas. Blaise Pascal disse que “os
números imitam o espaço que, no entanto, é duma natureza tão diversa”. Porém, é
nossa convicção, depois da presente investigação é que “os números imitam o espaço,
por serem da mesma natureza”.
3
No livro “Nonstandard Analysis in Practice” [22], Michel Goze desenvolve uma aplicação de
conceitos da ANS na Geometria Diferencial, dum ponto de vista absolutamente diverso do assumido
por nós nesta monografia.
4
Série de Conferências proferidas no Seminário conjunto CIMA-DMAT da Universidade de
Évora, pelo Prof. Paulo Almeida, do Instituto Superior Técnico.
Apêndice A
Representação geométrica de uma
parte do contínuo absoluto
(Veronese)
Numa nota de rodapé (Fondamenti [72], página 166) Veronese levanta um pouco
o véu sobre a intuição geométrica daquilo que ele chama “uma parte do contínuo
absoluto”. Vejamos a sua construção:
«Consideremos em primeiro lugar o campo infinito de ordem 1 em relação à
unidade fundamental e também as escalas, no sentido oposto, a partir da origem
fundamental. Os números de ( II) deixam-se reagrupar nas sucessões
(0)
(1)
()
1 1 1
A todo o segmento da forma ∞1 1 corresponde uma sucessão
todo o segmento da forma
∞1 (
1
,
1
e portanto a
1 2
+ 2 + + + )1
para lim = ∞( = 0 1 − 1) corresponde uma sucessão 1 . Donde é claro
que não considerando os infinitésimos em relação à unidade fundamental, e
considerando apenas os segmentos infinitos de ordem 1, pode-se fazer corresponder
univocamente os segmentos desta parte da forma fundamental aos pontos do plano
() euclidiano ordinário fazendo corresponder os valores de às escalas , cujas
origens são respetivamente indicadas por
0
∞1
1 2
∞1 2∞1 ( + 2 + + + )
e as de aos segmentos da mesma sucessão a partir da sua origem. Para se
poder usar também os valores negativos é necessário considerar as escalas 1 que
se têm por segmentos negativos do contínuo fundamental. Dois elementos
indefinidamente próximos neste contínuo estão situados numa série 1 . A dois tais
243
244
Representação geométrica de uma parte do contínuo absoluto (Veronese)
elementos correspondem dois pontos indefinidamente próximos do plano, mas a
propriedade inversa não se aplica, porque dois elementos correspondentes na forma
fundamental pertencem a duas sucessões próximas:
Fig. 45. Fonte: Veronese [72].
As paralelas ao eixo dos todas orientadas no mesmo sentido a partir da origem
fundamental representam as sucessões 1 , as quais têm a sua origem no seu ponto de
intersecção com o eixo dos . Se imaginarmos percorridas no mesmo sentido todas
as paralelas compreendidas na faixa plana limitada pelas paralelas conduzidas por 0
ou por ∞1 de 0 até ao ponto ∞1 temos uma clara representação do campo finito e
infinito de ordem 1, imaginando porém que as paralelas assim como estar uma sobre
a outra, e independentes entre si, sejam uma depois da outra e determinadas uma
pela outra; isto é, não têm o mesmo ponto comum no infinito, e formam um todo
incindível. Se o segmento (0∞1 ) é imaginado depois condensado no segmento
, tem-se um contínuo cuja unidade (10) primitiva é um infinitésimo atual.
Da mesma forma podemos proceder para os campos infinitos de ordem 2 3 , e
tem-se:
– Não considerando os infinitésimos em relação a uma unidade fundamental,
todos os segmentos dos campos finito e infinito de ordem podem ser representados
univocamente, na mesma ordem, num sistema de paralelas do espaço euclidiano a
dimensões.»
Apêndice B
Axiomas da Geometria de
Veronese
Axiomas de Veronese
(Agrupados por elemento geométrico)1
Grupo I
(axiomas do ponto)
I.1. Existem pelo menos dois pontos distintos (existência).
I.2. Todos os pontos são idênticos (identidade).
Grupo II
(axiomas da reta)
II.1. Existe um sistema de pontos a uma dimensão idêntico na posição das
suas partes (existência).
II.2. é determinado por dois dos seus pontos (standard) distintos (determinação).
II.3. é V- contínuo (continuidade).
II’.1. Uma reta é uma linha fechada (projetividade).
(Axiomas de medição linear)
II00 .1. A reta é um sistema de pontos a uma dimensão idêntica na posição das
suas partes, contínuo absoluto e determinado por dois dos seus pontos distintos.
II00 .2. Duas retas coincidem em sentido absoluto se têm em comum o campo
relativo a uma unidade qualquer a partir de qualquer ponto tomado como origem.
II”.3. Sobre a reta existem pontos que não a determinam (existência de pontos
não-standard).
Grupo III
(axiomas do plano)
1
Proposta do Autor.
245
246
Axiomas da Geometria de Veronese
III.1. Existem pontos fora da reta (existência).
III.2. Todos os pontos que não pertencem à reta determinam com todo o ponto
da reta, uma outra reta (determinação).
III.3. Se duas retas quaisquer têm um ponto comum pertencente a um segmento duma delas, existe um segmento idêntico 0 0 da outra (isomorfismo
entre retas dum plano).
III.4. Se um lado de um triângulo qualquer torna-se , a diferença entre os
outros dois torna-se indefinidamente pequeno (ultramétrica).
III.5. No campo das nossas observações atuais é verificada com grande aproximação a propriedade que por um ponto dum plano se pode conduzir uma e apenas
uma paralela a uma reta dada nesse mesmo plano (axioma local das paralelas, axioma euclidiano das paralelas).
Grupo IV
(axiomas do espaço)
→
→
−
−−
−
→
−−
−
→ −
−→
→ −
−→
→ −
0 0
0 0
IV.1. Se em duas cópias de um raio qualquer ; se escolher
duas cópias dos pontos e 0 e 0 tais que
≡ 0 0 ; ≡ 0 0
e o segmento seja idêntico a 0 0 , as duas cópias das retas são idênticas.
IV.2. O espaço intuitivo é uma figura a três dimensões em relação aos seus
pontos. (Dimensão local)
Grupo V
(Axiomas de medição não linear)
V.1. No campo finito absoluto na vizinhança de um ponto são válidos os
axiomas II b), III, IV e V.
V.2. Duas retas distintas quaisquer num campo finito na vizinhança de um
ponto e passantes por são distintas ainda que em todo o campo infinito ou
infinitésimo, em relação à unidade desses campos, e inversamente.
V.3. A figura retilínea determinada por duas retas quaisquer passantes por um
ponto em todo o campo finito na vizinhança de permanece a mesma relativamente à unidade desse campo mesmo quando se considera os pontos nos campos no
infinito ou nos campos infinitésimos na vizinhança do referido ponto sobre as duas
retas. (Invariabilidade da medida do ângulo no campo de um ponto)
Grupo VI
(Axiomas dos movimentos rígidos)
VI.1. Um corpo pode mover-se sem deformação. (Existência de movimentos
rígidos de pontos)
247
VI.2. Os pontos de uma figura qualquer podem mover-se livremente e independentemente uns dos outros descrevendo cada um deles uma linha intuitiva, de modo
que as posições dos pontos da figura correspondem univocamente e na mesma ordem às posições sucessivas, mas não excluindo que muitos pontos possam ocupar o
mesmo lugar numa posição sucessiva. (Existência de movimentos rígidos de figuras)
248
Axiomas da Geometria de Veronese
Bibliografia
[1] Almeida, P. – Introdução à Geometria Não Comutativa, notas de curso,
Outono-Inverno de 1997.
[2] Almeida, P. – Adèles through Noncommutative Geometry – An informal
motivation, Talk at Bologna, 20th. March 2002.
[3] De la sphère et du cilindre, Société d’editions les Belles Lettres, paris 1970
[4] Barreau, H. (et al, ed) – La Mathématique Non Standard, éditions du CNRS,
Paris, 1989.
[5] Bolzano, B. – Contributions to a better-grounded presentations of mathematics,
in [28].
[6] Bolzano, B. – From paradoxs of the infinite, in [28].
[7] H. Breger – Le continu chez Leibniz, in [64].
[8] Bosch S. (et all) – Non-Archimedean Analysis, Springer, 1984.
[9] Bettazzi, R. – Teorie delle grandezze, Enrico Spoerri, eds, Pisa, 1890.
[10] Birkhoff, G.D. – Annals of Maths. 3,1932.
[11] Cantor, G. – Sur les fondements de la théorie des ensembles transfinis, éditions
Jacques Gabay, Paris, 1989
[12] Cauchy, A. L. – Cours d’Analyse de l’École Royale Polytechnique, 1821.
[13] Connes, A. – Noncommutative Geometry, Academic Press, 1994.
[14] Cutland, N. (ed.) – Nonstandard Analysis and its Applications, London Math.
Soc. Student Texts, 10, Cambridge University Press, 1988.
[15] Dedekind, R. – Continuity and irrational numbers,in [28].
[16] Dedekind, R. –Was sind und was sollen die Zahlen?, in [28].
[17] Dedekind, R. – Continuidade e números irracionais, tradução de, revisão científica de A.J. Franco Oliveira, Évora, 1999 (não publicado).
249
250
Axiomas da Geometria de Veronese
[18] Deledicq, A., Diener, M. – Leçons de Calcul Infinitésimal, Armand Colin,
Paris, 1989.
[19] Descartes, R. – A Geometria, tradução do original de 1637, em edição bilingue,
por Emídio C. Queiroz Lopes, Edições Prometeu, Lisboa, 2001.
[20] Diener, F., Reeb, G. – Analyse non Standard, Hermann, 1989.
[21] Diener, F., Diener, M. (ed.) – Nonstandard Analysis in Practice, Spriger, 1995.
[22] Diener, M. – Enseigner l’analyse avec des ordres de grandeur, 1997.
[23] Ebbinghaus, H. (et al, eds). - Numbers, GTM 123, Springer, 1995.
[24] Enriques, F. – Principes de la géométrie, Encyclopédie des sciences mathématiques pures et appliquées, Tome III, vol 1, III1, 1911.
[25] Erhelich, P. (ed.) – Real numbers, generalizations of the reals and theories of
continua, Kluwer Academic Publishers, 1994.
[26] Erhelich, P. – General introduction, in [25]
[27] Euler, L. – Introduction ad Analysin Infinitorum, 1748.
[28] Ewald, W. B. – From Kant to Hilbert, A source Book in the Foundations of
Mathematics, Claredon Press, Oxford, 1996, Vols. I e II.
[29] Fontenelle, B. – Éléments de geométrie de l’infini, Paris, 1727.
[30] Fortes, P. – Introdução a estruturas Dedekind-Veronesianas do Contínuo, Universidade de Évora, 2003.
[31] Fortes, P. – Caminhos para uma Fundamentação da Geometria NãoArquimediana, Tese de Doutoramento, Universidade de Évora, 2004.
[32] Franco de Oliveira, A.J. – Geometria, Universidade de Évora, 1988.
[33] Franco de Oliveira, A.J. – Geometria Euclidiana, Universidade Aberta, Lisboa,
1995.
[34] Franco de Oliveira, A.J. – Transformações Geométricas, Universidade Aberta,
Lisboa, 1997.
[35] Franco de Oliveira, A.J.– Matemática Não-Standard, Apontamentos para a
disciplina homónima do mestrado em Matemática aplicada da Universidade de
Évora, não publicados, 1997.
[36] Freguglia, P. – I fondamenti de la geometria a piú dimensioni secondo Giuseppe
Veronese, atas do Seminari di Geometria, Dipartamento di Matematica, Università degli studi di Bologna, 1996-1997.
252
Axiomas da Geometria de Veronese
[55] Millman, R., Parker, G. – Geometry – A Metric Approach with Models,
Springer, 1991.
[56] Moise, E. – Elementos de Geometria Superior, Companhia Editorial Continental, S.A. Mexico-Espanha-Argentina, 1968
[57] Nelson, E. – Internal Set Theory: A new approach to Non Standard Analysis,
in BARR(89)
[58] Peano, G. – Geometric Calculus, Translated By Lloyd C. Kannenberg,
Birkhäuser, 2000.
[59] Postnikov, M. – Leçons de géométrie, Mir, Mscovo, 1988.
[60] Robert, A. – Nonstandard Analysis, Wiley, 1989.
[61] Robinson, A. – Procedings of the Royal Academy of Sciences, Amsterdam,
A64, 432-440, 1960.
[62] Robinson, A. – Nonstandard Analysis, North-Holland, 1966
[63] Rossier, P. – Géométrie synthétique moderne, Lib. Viubert, Paris, 1961.
[64] Salanskis, J-M., /Sinaceur,H. (eds.) – Le Labirynte du Continu, Springer, 1992.
[65] Sari, T. – General Topology, in [21]
[66] Schöenflies, A. (1911) – Notes sur la Géométrie non-archimédienne, Encyclopédie des sciences mathématiques pures et appliquées, Tome III, vol 1, III1,
1911.
[67] Sinaceur, H. – Corps et Modèles, Vrin, Paris, 1991.
[68] Sousa Pinto, J. M. – Métodos Infinitesimais de Análise Matemática, FCG,
Lisboa, 2000.
[69] Spivak, M. – A Comprehensive Introduction to Differential Geometry, Vols I
a V, Publish or Perish, Houston, Texas, 1999.
[70] Van den Berg, I.P. – Nonstandard Asymptotic Analysis, Lecture Notes in
Mathematics, 1249, Springer, 1987.
[71] Ventura Araújo, P. – Curso de Geometria, Gradiva, Lisboa, 1998.
[72] Veronese, G. – Fondamenti di Geometria a più dimensioni e a più specie di
unità rettilinee esposti in forma elementare, Padova, 1891.
[73] Veronese, G., Gazzaniga, P. – Elementi di Geometria, Parte I e Parte II,
Fratelli Drucker, 1900.