UNIVERSIDADE POSITIVO
NÚCLEO DE CIÊNCIAS EXATAS E TECNOLÓGICAS
ENGENHARIA DA COMPUTAÇÃO
GUINTHER BRENNER
MECANOMIOGRAFIA PARA AVALIAÇÃO MUSCULAR DE SUPERFÍCIE
CURITIBA, 2015
GUINTHER BRENNER
MECANOMIOGRAFIA PARA AVALIAÇÃO MUSCULAR DE SUPERFÍCIE
Projeto de graduação apresentado como requisito
parcial para obtenção do título de Engenheiro da
Computação pela Universidade Positivo.
Orientador: Prof. Dr. José Carlos da Cunha
CURITIBA, 2015
RESUMO
As primeiras observações da existência de vibrações musculares foram feitas há mais
de trezentos anos por um monge italiano ao colocar os polegares nos ouvidos. Abrindo e
fechando as mãos com os cotovelos erguidos percebia sons ruidosos e interpretava-os como
sons de espíritos.
A Mecanomiografia (MMG) é uma técnica não invasiva que regista essas vibrações
mecânicas produzidas pelos músculos ao se contraírem. Utilizando acelerômetros que captam
e transformam essas vibrações de baixa frequência em sinais elétricos, que são condicionados
por amplificadores e filtros analógicos e enviados para um microprocessador que realiza o
processamento e a transmissão das informações relativas à atividade muscular para um
microcomputador que exibe as informações de forma gráfica.
Para a aquisição do sinal de MMG, utilizou-se o acelerômetro triaxial MMA7361L, da
Freescale Inc., fixado à perna com uma cinta elástica sobre o músculo reto femoral, de forma a
se avaliar a atividade muscular em tempo real. Os resultados preliminares deste trabalho se
mostraram consistentes com os verificados na literatura, abrindo oportunidades de novas
pesquisas relacionadas à monitoração não invasiva e sem a utilização de eletrodos,
susceptíveis a ruídos de movimento e interferências eletromagnéticas, por se tratar de uma
técnica de aquisição de informação mecânica.
Palavras-chave: mecanomiografia, mmg, acelerômetro.
ABSTRACT
The first observations of the existence of muscle vibration were made for over three
hundred years by an Italian monk that put his thumbs in ears. Opening and closing hands with
elbows raised perceived noisy sounds and interpret them as sounds of spirits.
The Mechanomyography (MMG) is a noninvasive technique that registers these
mechanical vibrations produced by the muscles when contract. Using accelerometers, these
low frequency vibrations are captured and transformed into electrical signals, which are
conditioned by amplifiers and analog filters and sent to a microprocessor that performs the
processing and transmission of information on muscle activity to a PC that displays the related
information on a graphical form.
For the acquisition of MMG signal, we used the triaxial accelerometer MMA7361L,
Freescale Inc., attached to the leg with an elastic band over the rectus femoris muscle, in order
to evaluate muscle activity in real time. Preliminary results of this study were consistent with
those found in the literature, opening up opportunities for new research related to noninvasive
monitoring without the use of electrodes, susceptible to motion noise and electromagnetic
interference, because it is an acquisition technique to information mechanical.
Keywords: mechanomyography, mmg, accelerometer.
5
SUMÁRIO
1 INTRODUÇÃO ......................................................................................................................6
1.1 OBJETIVO GERAL ..................................................................................................6
1.2 OBJETIVOS ESPECÍFICOS ....................................................................................6
2 FUNDAMENTAÇÃO TEÓRICA .........................................................................................7
2.1MÚSCULO E CONTRAÇÃO MUSCULAR ...........................................................7
2.2 MECANOMIOGRAFIA ...........................................................................................8
2.3 ACELERÔMETRO ...................................................................................................9
2.3.1 ACELERÔMETRO CAPACITIVO ........................................................11
3 ESPECIFICAÇÃO TÉCNICA............................................................................................12
3.1 ANÁLISE DE REQUISITOS .................................................................................13
3.2 RESTRIÇÕES .........................................................................................................14
3.3 DESCRIÇÃO DAS PARTES COMPONENTES E INTERFACEAMENTO
ENTRE SISTEMAS ................................................................................................14
4 DESENVOLVIMENTO.......................................................................................................15
4.1 HARDWARE ..........................................................................................................15
4.2 SOFTWARE ............................................................................................................17
5 TESTES E RESULTADOS .................................................................................................18
6 CONSIDERAÇÕES FINAIS E TRABALHOS FUTUROS .............................................18
7 BIBLIOGRAFIA ..................................................................................................................19
6
1
INTRODUÇÃO
A Mecanomiografia, sendo uma técnica não invasiva, registra as vibrações produzidas
pelas fibras musculares ao se contraírem. Para avaliar a musculatura foi utilizada esta técnica,
demonstrando graficamente a contração no momento da atividade muscular com o auxilio de
um acelerômetro sobre o músculo reto femoral. Este músculo foi selecionado para este
trabalho em função de sua localização e sua relativa independência de outros músculos, que
poderiam gerar interferências (FALLER, 2007).
1.1
OBJETIVO GERAL
O presente trabalho teve por objetivo geral o desenvolvimento de um sistema de
aquisição e monitoramento da atividade muscular por meio da técnica de mecanomiografia de
superfície (MMG), proporcionando a visualização dos sinais da contração em tempo real.
1.2
OBJETIVOS ESPECÍFICOS
Como objetivos específicos para a realização deste trabalho foram desenvolvidos:
a) Instrumentação para aquisição e processamento de sinais provenientes do acelerômetro;
b) Protocolo de transmissão e de interface de comunicação entre os subsistemas;
c) Software gráfico para visualização da atividade muscular;
d) Firmware embarcado no microprocessador para o processamento dos sinais do
acelerômetro;
e) Testes de avaliação e validação do sistema desenvolvido.
7
2
2.1
FUNDAMENTAÇÃO TEÓRICA
Músculo e Contração Muscular
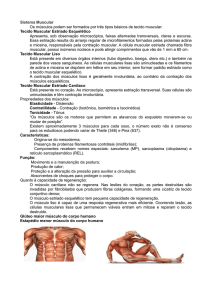
O corpo humano é formado por centenas de músculos que auxiliam nos movimentos,
estabilidade do esqueleto e preenchimento do corpo, uma vez que fazem ligação dos ossos
com o sistema nervoso. Os músculos são tecidos do corpo humano responsáveis pela
contração e distensão das células que originam os movimentos. Estes músculos são
classificados em músculo estriado esquelético, estriado cardíaco e músculo liso (DÂNGELO
& FATTINI, 1998).
O estímulo para a contração muscular é geralmente um impulso nervoso, que se propaga
pela membrana das fibras musculares, chegando até ela por meio dos nervos, passando pela
membrana das fibras musculares, atingindo o retículo sarcoplasmático, fazendo com que o
cálcio ali armazenado seja liberado no citoplasma. Ao entrar em contato com as miofibrilas, o
cálcio desbloqueia os sítios de ligação da actina e permite que esta se ligue à miosina,
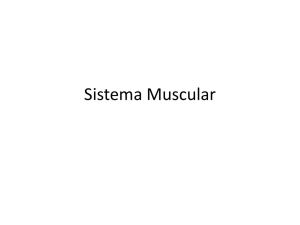
iniciando a contração muscular, como ilustrado na figura 1. Quando encerra o estímulo, o
cálcio é bombeado novamente para o interior do retículo sarcoplasmático e termina a
contração muscular (DAVIES et al., 2002).
Figura 1 – Contração Muscular
Fonte: http://cienciadotreinamento.com.br/co-ativacao
8
Figura 2 – Movimento
Fonte: RAMALHO et al., 2008.
A figura 2 mostra que o movimento do nosso corpo depende não só da atividade muscular
em si, mas deve estar associada a ossos e articulações. Quando um músculo contrai, este puxa
ou estica os ossos variando o ângulo articular.
2.2
Mecanomiografia
A mecanomiografia é uma técnica que registra as vibrações do músculo esquelético que
ocorrem quando este se contrai. Por se tratar de uma técnica relativamente recente, ainda são
poucos os trabalhos relacionados disponíveis na literatura científica, o que dificulta a
realização de pesquisas mais amplas (VAZ e HERZOG, 1999).
O primeiro relato sobre a auscultação de sons musculares foi apresentado pelo monge
italiano Francesco Maria Grimaldi em 1665. Ao colocar os polegares nas orelhas de forma a
cobrir o canal auditivo, os sons musculares foram percebidos como sons ruidosos, quando o
indivíduo fechava o punho com os cotovelos levantados. Esses ruídos foram interpretados por
Grimaldi
como
representativos
do
movimento
contínuo
apressado
dos
espíritos
(GONÇALVEZ, 2009).
Dois séculos mais tarde, em 1810, o suposto “som muscular” foi novamente estudado por
meio de estetoscópio. Neste estudo constatou-se que a frequência de ocorrência desses sons,
9
que se pronunciavam como estalos discretos, aumentavam em decorrência do nível de
contração. Esta frequência foi descrita com limite inferior e superior dos sons musculares
como sendo entre 14 e 36 Hz, respectivamente.
Mais recentemente, com o desenvolvimento de sensores eletrônicos e computadores
capazes de captar, armazenar e processar grandes quantidades de sinais ou informações, é que
a mecanomiografia voltou a ser utilizada para estudos da função muscular.
A mecanomiografia é uma técnica recente que regista as vibrações musculares, quando
estes se contraem, apresentando características semelhantes às da eletromiografia (EMG) de
superfície, com a vantagem de ser uma técnica não invasiva e de fornecer informações
relativas aos padrões de ativação eléctrica. A MMG tem a vantagem sobre a EMG de fornecer,
também, informações relativas à produção de força no músculo (VAZ e HERZOG, 1999).
Uma vibração mecânica é o movimento de um corpo que oscila em torno de uma posição
de equilíbrio. Esse movimento ou oscilação é geralmente produzido por uma função
causadora, e depende das propriedades materiais do sistema. Quando esse movimento
oscilatório atinge a superfície do sistema, áreas de alta e baixa pressão ocorrem devido ao
deslocamento de moléculas do meio (ar, água) no qual o sistema está imerso. Este
comportamento oscilatório das moléculas no meio em redor do sistema produz ondas sonoras
(VAZ e HERZOG, 1999).
Quando um músculo se contrai, ele produz vibrações que se traduzem por oscilações da
pele que recobrem esse músculo. Essas oscilações, e os sons correspondentes, podem ser
detectados por meio de acelerômetros colocados sobre a superfície da pele, transformando a
vibração em sinal elétrico.
2.3
Acelerômetro
O principio básico de operação dos acelerômetros consiste em uma massa de prova,
conectada a uma referência através de uma mola com coeficiente elástico k e um amortecedor
com coeficiente de amortecimento ɣ, ou seja, um sistema massa-mola-amortecedor. Devido à
inercia, o movimento da massa de prova m não será exatamente o mesmo do que o da
referência, assim, é possível usar essa diferença de posição (x = xf - xm) para medir a
aceleração, onde x é a diferença entre a posição de referencia xf e a posição da massa xm
10
(CALACHE, 2013). A figura 3 apresenta uma microfotografia de um acelerômetro
microeletromecânico (MEMS).
Figura 3 – Fotografia microscópica de um acelerômetro MEMS
Fonte: CALACHE, 2013
A partir da segunda lei de Newton pode-se modelar o sistema e encontrar a seguinte
equação diferencial [1]:
onde ɣ é o coeficiente de amortecimento, k o coeficiente de elasticidade da mola e F a força
aplicada ao sistema.
Usando a transformada de Laplace para resolver a equação e definindo a frequência
natural do sistema ω0 como [2]:
e o fator de qualidade Q como [3]
11
obtém-se a função de transferência Hs do sistema [4]
2.3.1
Acelerômetro Capacitivo
Nos acelerômetros do tipo capacitivo, a massa de prova fica localizada entre duas placas
paralelas formando assim dois capacitores, como mostrado na figura 4. A aceleração então
pode ser medida de acordo com a capacitância entre as placas que varia com a posição da
massa de prova (placa central) (KORVINK & PAUL, 2006).
Figura 4 – Modelo simplificado do acelerômetro capacitivo
Fonte: Freescale, 2008
Os acelerômetros do tipo capacitivo são os mais utilizados devido ao seu baixo custo,
baixo consumo de energia e baixa suscetibilidade a ruído.
12
3
ESPECIFICAÇÃO TÉCNICA
O presente trabalho teve por objetivo o desenvolvimento de um sistema de
monitoramento da atividade muscular (MMG), a partir de um acelerômetro que capta a
vibração muscular no momento da atividade física.
O sistema desenvolvido possui um acelerômetro triaxial Freescale MMA7361L
(FREESCALE, 2008), que é fixado à perna, sobre o músculo reto femoral, conforme figura 5,
com uma cinta elástica.
Músculo reto femoral
Figura 5 – Músculo Reto Femoral
Fonte: RAMALHO et al., 2008.
O acelerômetro capta a aceleração do movimento do músculo no momento em que há a
contração. No acelerômetro, utilizou-se o eixo Z, que captar este movimento, transformando a
força muscular em uma faixa de tensão de saída ente 0,85 e 2,45V (FREESCALE, 2008).
13
Este sinal é filtrado por um filtro Butterworth passa-baixa de oitava ordem com faixa de
corte de 40 Hz para remoção de ruído e frequências fora da faixa de análise.
O sinal filtrado é enviado para o microprocessador ATMEL ATmega 2560, que faz a
calibração do acelerômetro e envia os dados via porta serial para Microcomputador.
Desenvolveu-se uma interface gráfica em linguagem C#, que recebe os dados através da
porta serial, mostrando em forma de gráfico de linha com escala em porcentagem da
amplitude de força aplicada ao exercício, conforme figura 6.
Figura 6 – Tela do Sistema
Fonte: o autor
3.1
ANÁLISE DE REQUISITOS
Para a medição do movimento de contração muscular, foi utilizado um aceleramento com
sensibilidade de 800mV/g (1.5g) para captura de qualquer vibração gerada pelo músculo no
momento da prática de exercícios.
14
3.2
RESTRIÇÕES
O sistema é alimentado por meio de duas baterias de 9V com tensão de +4,5V e -4,5V,
com autonomia de 4 horas de uso continuo. O dispositivo tem índice de proteção à entrada de
sólidos e líquidos IP63 e segue as recomendações da norma NR10 de segurança elétrica.
3.3
DESCRIÇÃO DAS PARTES COMPONENTES E INTERFACEAMENTO ENTRE
SISTEMAS
O sistema desenvolvido consiste de três partes:
•
Cinta elástica com velcro para fixação do acelerômetro;
•
Módulo de aquisição e condicionamento do sinal e módulos de comunicação e
transmissão de dados;
•
Software de visualização gráfica.
Na cinta elástica com velcro foi fixado o acelerômetro, que será posicionado à perna
sobre o músculo reto femoral, conforme figura 7.
Figura 7 – Cinta de Fixação do acelerômetro
Fonte: o autor
No módulo de comunicação e condicionamento do sinal utilizou-se um filtro Butterworth
passa-baixa de oitava ordem com faixa de corte de 40 Hz e o microprocessador ATmega 2560
para comunicação serial com o microcomputador. No microcomputador executa-se o software
de exibição gráfica.
15
4
4.1
DESENVOLVIMENTO
HARDWARE
Conforme apresentado na figura 8, o hardware é composto pelos módulos de aquisição,
condicionamento do sinal, módulos de comunicação e transmissão de dados, e software de
visualização gráfica.
Acelerômetro
Filtro
Passa-Baixa
Microprocessador
Microcomputador
Figura 8 – Diagrama em blocos do hardware
Fonte: o autor
O modulo de aquisição é composto por um acelerômetro triaxial Freescale
MMA7361L, visto na figura 9, no qual foi utilizado o eixo Z para leitura da atividade
muscular.
O sinal do acelerômetro é envia por um cabo de 10 vias até o filtro Butterworth passabaixa de oitava ordem com faixa de corte de 40 Hz para remoção de ruídos e frequências fora
da faixa de análise.
Figura 9 – Placa de circuito impresso do acelerômetro MMA7361L
Fonte: Freescale, 2008.
16
O sinal na saída do filtro é enviado para o microprocessador, ATmega 2560, que
transmite dos dados via porta serial para o microcomputador.
Figura 10 – Placa do módulo de aquisição e condicionamento do sinal e módulos de comunicação e transmissão de dados
Fonte: o autor
Na figura 10 apresenta-se o circuito de aquisição e condicionamento do sinal enviado
do acelerômetro U6. A porta 3 do acelerômetro envia o sinal do eixo Z para o filtro passabaixa. Depois de filtrado, o sinal é enviado para a porta 96 do microprocessador U1 ATmega
2560, na qual há um conversor analógico-digital (ADC) de 10 bits que converte o sinal
analógico proveniente do acelerômetro para digital. Este sinal é processado e enviado ao
microcomputador através da comunicação serial pelas portas TX 45 e RX 46.
A alimentação do sistema é proveniente de 2 baterias de 9V ligadas em serie,
fornecendo tensão de +4,5V, -4,5V e terra, que alimenta o acelerômetro e os amplificadores
operacionais do filtro passa-baixa. O microprocessador é alimentado diretamente pela porta
serial ligada ao microcomputador.
17
4.2
SOFTWARE
O software foi desenvolvido em linguagem C#, para plataforma Windows, como visto
na figura 6.
Na tela há três botões: Conectar, Limpar e Sair, e uma caixa de seleção das portas
seriais.
Ao Abrir o software, deve-se selecionar a porta serial na qual foi conectado o hardware
e, clicando em Conectar, para iniciar a leitura dos dados vindos do acelerômetro. Neste
momento o gráfico começa a ser alimentado com as informações do sinal da contração
muscular, exibido numa escala de 0% a 100%, referente à amplitude do sinal de força
exercida.
O botão limpar apaga as informações exibidas no gráfico, não sendo necessário que se
feche o programa para seja iniciada uma nova leitura. Ao clicar em Desconectar, a porta serial
é fechada. Ao clicar em Sair, o programa é encerrado e fecha a porta serial, caso não tenha
sido fechada anteriormente, para não haver problemas de bloqueio da leitura da porta serial.
18
5
TESTES E RESULTADOS
Nos testes realizados em laboratório, com o individuo sentado ou em pé fazendo força
ao levantar a perna por repetidas vezes, foi observado que a resposta à atividade muscular
fornece informações condizentes com as apresentadas graficamente, onde cada pico representa
uma contração muscular e a amplitude do sinal demonstra a porcentagem de força aplicada.
No gráfico apresentado na figura 6, foi constatado que abaixo de 20%, quando
realizada as leituras sentado ou pé, a musculatura permanece em repouso e/ou mantendo
equilíbrio do corpo e, acima de 20%, demonstrou-se a contração muscular, mesmo em
pequenos movimentos.
A sensibilidade do acelerômetro foi alterada de 6g para 1.5g, tornando-o mais sensível
às vibrações geradas pelas contrações musculares, tornando a leitura mais clara e precisa.
6
CONSIDERAÇÕES FINAIS E TRABALHOS FUTUROS
Verificou-se que a técnica de mecanomiografia utilizando acelerômetro produz
resultados condizentes com a atividade muscular estudada, fornecendo respostas rápidas e
precisas para o monitoramento de atividades musculares.
Um dos maiores problemas encontrados no desenvolvimento do projeto, foi a
determinação da forma de onda produzida pela MMG, pois são poucos trabalhos publicados
que mostram a atividade muscular registrada pela MMG utilizando acelerômetros.
Para trabalhados futuros, pode-se aplica a técnica de MMG na área de fisioterapia no
acompanhamento da recuperação muscular em pacientes em recuperação, na área esportiva no
monitoramento muscular de atletas. Outra aplicação seria o acompanhamento de idosos em
conjunto com outros transdutores monitorando a temperatura, frequência cardíaca, atividade
física diária, entre outros parâmetros fisiológicos.
19
7
BIBLIOGRAFIA
Anatomiaonline.
Músculos
do
Membro
Inferior.
Disponível
em
http://anatomiaonline.com/musculos/inferior/inferior.html. Acessado em dezembro/2015.
CALACHE,
D.
C.
Caracterização
de
um
Acelerômetro
Baseado
em
Sistemas
Microeletromecânicos (MEMS). Dissertação. Universidade do Estado do Rio de Janeiro. Rio
de Janeiro. RJ. 2013.
Disponível em http://www.lee.eng.uerj.br/~jpaulo/PG/2013/PG-
Acelerometro-MEMS-2013.pdf. Acessado em novembro/2015.
CAMPOS, M. A. Biomecânica da Musculação. 2.ed. Sprint, 2002.
CETINKUNT, S. Mecatrônica. Rio de Janeiro: LTC, 2008.
COSTA, B. J. Caracterização do Sinal Mecanomiográfico através da Acelerometria em Três
Diferentes Músculos. Dissertação. Universidade Federal do Rio de Janeiro. RJ. 2008.
Disponível em http://www.peb.ufrj.br/teses/2008/Tese2.pdf. Acessado em setembro/2015
DÂNGELO, G., FATTINI, A. Anatomia Humana Sistêmica e Segmentar. 3ed. São Paulo:
Atheneu, 2007.
DAVIES, A.; BLAKELEY, A. G. H.; KIDD, C.; MCGEOWN, J. G. Fisiologia Humana.
Porto Alegre: Artmed, 2002.
FALLER, Lilian, Mecanomiografia como Técnica de Detecção de Fadiga Muscular durante a
Aplicação da Estimulação Elétrica Neuromuscular (EENM), Dissertação. Pontifícia
Universidade Católica do Paraná. PR. 2007.
20
FREESCALE. MMA7361L ±1.5g, ±6g Three Axis Low-g Micromachined Accelerometer,
Freescale, 2008. Disponível em
https://www.nxp.com/files/sensors/doc/data_sheet/MMA7361L.pdf. Acessado em abril/2015.
GONÇALVEZ, J. S, Monitorização do Comportamento dos Sensores Piezoeléctricos e
Piezoresistivos para Próteses, via wireless link. Dissertação. Universidade de Minho. Portugal.
2009.
KORVINK, J. G. e PAUL, O., MEMS : MEMS: A Practical Guide to Design, Analysis, and
Applications, William Andrew, 2006.
RAMALHO, J.; GOBBI, J. F.; ROCHA, L. M.; NISHIDA, S. M. Músculos: Como nos
movimentamos?
Disponível
em
Universidade
Estadual
http://www.museuescola.ibb.unesp.br/subtopico.php?id=2&pag=2&num=3.
Paulista
em
Acessado
em
dezembro/2015.
VAZ, M.; HERZOG, H. A Mecanografia como Técnica Não-invasiva para o Estudo da
Função Muscular. Revista Movimento. Vol. 5 No 10, Universidade Federal do Rio Grande do
Sul
–
RS.
1999.
Disponível
http://www.seer.ufrgs.br/index.php/Movimento/issue/view/175/showToc.
Abril/2015.
Acessado
em
em