Modelos de Simulação
1.1
INTRODUÇÃO
Para fazer modelação em ambiente utilizam-se
dois métodos, o estatístico e o dinâmico.
O Método Estatístico, com equações
matemáticas e conceitos de estatística, utiliza um
programa de computador chamado modelo estatístico,
que, através de uma correlação entre duas ou mais
variáveis, modela ou prevê uma delas.
A Estatística desempenha um papel cada vez mais
importante em quase todos os campos do
conhecimento. Se, tal como o seu nome indica, a
Estatística começou por estar ligada aos negócios do
Estado, a sua aplicação estende-se hoje a ramos tão
diversos como a agricultura, a biologia, o comércio, a
economia, as comunicações, a química e a física.
O
Método
Dinâmico,
com
equações
matemáticas e conceitos físicos, utiliza um programa
chamado modelo dinâmico. Esse modelo, através de
equações físicas, simula os movimentos dos fluidos
para prever os acontecimentos futuros. O modelo não
reproduz a realidade, limitando-se a representar, com
alguma exactidão, vários fenómenos observados e a
simular alguns processos físicos.
As previsões são de grande importância para a
tomada de decisões por parte dos órgãos legislativos e
de decisão, em relação à agricultura e ao auxílio às
populações.
1.2
MODELOS ESTATISTICOS
1.2.1
RECOLHA DE DADOS
A abstenção situou-se em 42%. O que significa este
número? Como foi obtido?
O objectivo da estatística é fornecer
informação sob a forma de números. A estatística
consiste num método intelectual que visa obter
conhecimento a partir dos números. Para conseguir
este objectivo, a estatística trata os números em três
formas:
–
Produção de dados: por observação
directa
do
fenómeno
que
pretendemos estudar ou montando
experiências que fornecem os dados.
A qualidade dos dados obtidos
determinará
a
qualidade
das
conclusões a que se chegam.
–
Organização e análise dos dados:
conjunto de ferramentas gráficas e
numéricas que exploram os dados
disponíveis. O objectivo da análise
5º Ano Eng. Ambiente
Cap 1 – Modelos de Simulação em Ambiente
determina a estratégia e o tipo de
análise a prosseguir.
–
Obtenção de conclusões sobre os
dados (inferência estatística): utiliza
os conceitos de probabilidade para
estabelecer conclusões a partir dos
dados e com suporte nas técnicas
aplicadas. As conclusões são sempre
acompanhadas por um valor da
confiança.
Variável aleatória (v.a.): os dados variam, sendo
impossível prever, com precisão, o próximo valor que a
variável tomará. No limite é possível associar uma
maior ou menor probabilidade a determinado valor. São
comandadas pelas leis do acaso e geram processos
aleatórios ou estocásticos (processos aleatórios
referenciados na var. tempo).
Dada a variabilidade dos dados, todas as
conclusões que se possam tirar têm um carácter
incerto. O mérito da estatística é produzir dados e
conclusões, cuja utilidade real não é destruída pela
variabilidade e incerteza. É necessário um conjunto de
observações que retractem alguma (s) variável (eis).
No entanto, para compreendê-las não se precisa do
conjunto
de
observações
que
traduzam
o
comportamento da variável durante todo o tempo e
para todo o espaço. Não é necessária a população.
Bastará uma parte destes dados, que irão constituir a
amostra de dados, sobre a qual se irá desenvolver toda
a análise estatística, quer gráfica, quer numérica.
A monitorização de dados em ambiente
A identificação, avaliação, tratamento e
resolução de qualquer problema do ambiente requer
uma base de informação, tanto mais completa quanto
possível.
A gestão dos recursos naturais, a poluição
atmosférica, o dimensionamento de uma albufeira e o
uso dos solos, são alguns exemplos de problemas
ambientais que só poderão ser estudados dispondo de
um conjunto de informação sobre variáveis
relacionadas.
De uma maneira geral, o estudo dos problemas
ambientais implica, a recolha de dados. A recolha de
dados pode ser realizada de duas maneiras distintas: a
experimental e/ou a observacional.
•
abordagem
experimental
refere-se
às
situações em que se constrói um plano
experimental em que a variável possa ser
medida.
•
abordagem observacional tem que se conhecer
que variáveis se pretende avaliar e fazer uma
campanha de medições. No entanto, é
necessário fazer um estudo antes da
6
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
campanha por forma a saber, de acordo com o
objectivo que se tem para o estudo:
que variáveis se vão medir,
quantas amostras de água se vai
colher,
em que pontos do estuário se vão
colher as amostras,
com que frequência no tempo se vão
colher as amostras,
a que profundidades se vão colher as
amostras de água.
É necessário estabelecer um plano de
monitorização para realizar determinado estudo. A
monitorização de dados dos sistemas ambientais
permite-nos avaliar as concentrações ambientes
nesses sistemas (ar, água, solos) ou as emissões dos
efluentes líquidos, gasosos, ou outros.
espaços podem afectar os testes estatísticos e podem
conduzir a resultados errados.
Deve, ainda ter-se especial atenção para:
dados perto ou abaixo dos limites de
detecção dos aparelhos usados;
valores suspeitos e/ou faltosos;
relações causa-efeito complicadas;
necessidade de medir mais do que uma
variável simultaneamente.
1.2.2
AMOSTRAGEM DE POPULAÇÕES
AMBIENTAIS
A amostragem é o processo de seleccionar
elementos representativos de uma população. Assumese que, a análise sobre estes elementos fornece
informação sobre a população.
Note-se que muitos procedimentos estatísticos foram
desenvolvidos
para conjuntos de dados que se
presumia terem sido extraídos de uma população com
distribuição normal. Muitos conjuntos de dados são
frequentemente assimétricos e alongados para a
direita e, por isso, a validade dos procedimentos
clássicos são postos em causa.
1.2.3 VARIABILIDADE E ERROS DOS DADOS
AMBIENTAIS
A grande variabilidade ambiental (variação das
características de uma amostra para outra), é um dos
factores que mais contribuem para a incerteza da
informação recolhida. Esta variabilidade pode ter
diferentes causas, tais como:
•
distribuição não-uniforme da poluição nos
meios ambientais, devido à topografia,
meteorologia, acção das marés e mecanismos
físicos, químicos e biológicos;
•
a distância, direcção e elevação do ponto
amostrado em relação ao ponto de descarga
do poluente;
•
processos de acumulação / degradação de
poluentes ao longo do tempo;
•
variação natural dos meios ambientais ao
longo do tempo e do espaço.
Os valores obtidos das medições de variáveis
podem não constituir valores verdadeiros devido a um
conjunto de erros que se podem verificar:
–
enviezamento da medição é uma
sobre ou sob estimação do valor
verdadeiro da amostra
–
a incerteza aleatória da medição são
desvios
aleatórios
do
valor
verdadeiro. A magnitude deste desvio
varia de medição para medição e pode
resultar de um conjunto de muitos
factores desconhecidos.
Em alguns casos, uma distribuição estatística
assimétrica, como a lognormal, pode ser aplicada, ou
ainda a distribuição assimétrica pode ser aproximada à
normal através de transformações. No caso da
transformação de dados, podem ser introduzidos
enviesamentos se os resultados obtidos foram
expressos na escala original.
Os dados de base não devem ser correlacionados, já
que dados altamente correlacionados no tempo e/ou
5º Ano Eng. Ambiente
7
Modelos de Simulação
Erro aleatório da amostra: consiste na
variação de uma medição devido apenas ao processo de
selecção aleatória das amostras. Este erro é devido à
existência da variabilidade ambiental (todos os N
elementos da população não têm o mesmo valor para
uma mesma variável). Se se pretender estimar o valor
médio da população, o erro aleatório estará tanto mais
perto de zero, quanto maior for N.
Considerem-se, ainda os erros que facilmente
podem ocorrer durante a recolha das amostras, as
análises de laboratório e as análises estatísticas.
Cap 1 – Modelos de Simulação em Ambiente
–
–
–
1.2.4 ESCOLHA DO TIPO DE AMOSTRAGEM
A escolha do tipo de amostragem depende dos
objectivos do estudo, dos padrões de variabilidade da
população em estudo e do factor custo-eficácia de
planos alternativos.
Existem
fundamentalmente
quatro
tipos
de
amostragem:
•
Amostragem Casual – qualquer localização /
tempo é válido para tomar uma amostra. Este
tipo de amostragem origina estimativas
enviezadas das características da população,
sendo apropriada para os casos em que a
população alvo é completamente homogénea
(normalmente não é verdade nos sistemas
ambientais).
•
Amostragem
Subjectiva
–
selecção
subjectiva de unidades de população. Este tipo
de amostragem pode ser utilizado quando se
pode ver todas as unidades de população e
seleccionar aquelas que parecem serem as
representativas das condições médias. A
população alvo tem de estar perfeitamente
definida,
homogénea
e
completamente
acessível (normalmente não é verdade nos
sistemas ambientais).
•
Amostragem Estatística – refere-se ao uso
de métodos específicos de selecção aleatória.
–
amostragem aleatória simples, onde
cada uma das N unidades da
população tem igual oportunidade de
ser tomada como amostra e a escolha
de uma amostra não influencia a
escolha de outra.
–
amostragem aleatória estratificada
é utilizada quando a população alvo é
heterogénea
e
tem
de
ser
considerada em partes (estratos)
internamente
homogéneas.
As
amostras são seleccionadas de cada
5º Ano Eng. Ambiente
–
um dos estratos por amostragem
aleatória simples.
amostragem multi-estágio pressupõe
a existência de vários níveis de subamostras.
amostragem em "clusters" é útil
quando as unidades de população
formam "clusters" e todas as
unidades
em
cada
"cluster"
seleccionado aleatoriamente podem
ser medidas.
amostragem sistemática em que as
amostras são recolhidas de acordo
com um padrão temporal ou espacial:
por exemplo, locais equidistantes
numa linha, ou intervalos de tempo
iguais.
amostragem dupla é útil quando há
uma forte relação linear entre a
variável de estudo e uma outra cuja
medição seja mais barata e mais
facilmente medida.
Amostragem de Busca – é útil quando existe
informação histórica, conhecimento do local, ou
amostras anteriores que indicam onde o objecto da
busca pode ser encontrado.
1.2.5 DECISÃO SOBRE O TAMANHO DA
AMOSTRA
A determinação do tamanho da amostra
(1<n<N) é um dos problemas mais cruciais em
amostragem, pois o número de indivíduos ou objectos a
serem observados é mais importante do que a
percentagem da população.
O tamanho da amostra depende de inúmeros factores,
como os custos envolvidos, a disponibilidade e a
acessibilidade aos locais de amostragem, o grau de
precisão e de confiança desejado, o objectivo do
estudo, o conhecimento que da população a amostrar e
do comportamento da variável que se pretende medir.
Técnicas de
Problemas Ambientais
Amostragem
Aplicadas
a
Assumimos o seguinte modelo para a medição xi da iésima unidade da população:
xi= µ + di + ei = µi + ei
com
µ = média verdadeira das N unidades da população,
di = distância a que, cada valor verdadeiro para a iésima unidade, µi, está de µ,
8
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
ei = xi - µi = distância a que cada valor da i-ésima
unidade, xi está de µi, (medida de incerteza).
Os erros standard de xmédia e Nxmédia são
as raízes quadradas destas variâncias, ou seja:
A média verdadeira para a variável em estudo, por
exemplo a concentração de um poluente, é dada por:
A concentração total
população é I= Nµ.
do
poluente
presente
na
A variância verdadeira da população é:
Muitas vezes é impossível ou demasiado caro
medir todas as N unidades da população, e uma vez que
se considera que existem sempre ei diferentes de
zero, os parâmetros da população são desconhecidos.
Neste
caso,
utilizam-se
estimadores
desses
parâmetros:
Uma medida do erro aleatório da amostra
associado a xmédia e Nxmédia são as suas variâncias
Var(xmédia) e Var(Nxmédia), que são dadas,
respectivamente, por:
1.2.6 DETERMINAÇÃO DO TAMANHO DA
AMOSTRA
Os métodos para a determinação do tamanho
da amostra que a seguir se apresentam aplicam-se
apenas ao caso de dados independentes (não estão
correlacionados no tempo e/ou no espaço, i.e., quando o
intervalo e/ou as distâncias entre as amos são
suficientemente grandes.
1.2.6.1 VARIÃNCIA PRÉ-ESTABELECIDA
Suponhamos que a média verdadeira µ será
estimada por xmédia e que Var(xmédia) não deverá ser
maior que um valor V pré-estabelecido. Fazendo
V=Var(xmédia) e resolvendo em ordem a n, vem
Se N é suficientemente grande em relação a s2, vem
Nestas expressões, f=n/N é a fracção das N
unidades da população alvo que foram medidas. Estas
expressões são válidas para o caso da amostragem
decorrer sem reposição das unidades medidas no
conjunto da população alvo. Os estimadores de
Var(xmédia) e Var( Nxmédia) são, respectivamente:
5º Ano Eng. Ambiente
1.2.6.2 MARGEM DE ERRO PRÉ-ESTABELECIDA
Fixa-se a margem de erro absoluto d que pode
ser tolerada quando decidimos sobre o tamanho da
amostra, e a probabilidade a de aceitação de
excedermos esse erro. Pretende-se escolher n, tal
que:
9
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
onde d e alfa são pre-estabelecidos. Nesta abordagem,
V é substituído por (d/Z1-alfa/2)2, onde (Z1-alfa/2) é
o desvio normal padrão que "corta" a distribuição
normal padrão no ponto (alfa/2). Assim, o tamanho da
amostra é dado por:
valor de t correspondente, o qual vai ser usado para
obter um novo valor de n, que se designa por n3. Após
algumas iterações o valor de n estabilizará para um
valor, que será o tamanho da amostra desejado.
1.2.7 AMOSTRAGEM ESTRATIFICADA
ou, sendo N muito maior que (d/Z1-alfa/2)2,
Os valores para Z1-alfa/2, para vários a, são
dados em tabelas estatísticas. Alguns valores
seleccionados para valores de alfa mais frequentes são
dados a seguir:
alfa
0.20
0.10
0.05
0.01
Z1alfa/2
1.28
1.65
1.96
2.58
As Equações são perfeitamente aplicadas
quando x é normalmente distribuída, o que acontece
quando a variável em estudo tem uma distribuição
normal, ou quando n é suficientemente grande.
Quando não se tem a certeza se os dados se
distribuem normalmente, utiliza-se a distribuição t de
Student, em vez da distribuição normal padrão para o
cálculo de n. Assim, em vez de Z1-alfa/2, utiliza-se t1alfa/2, n-1, que é o valor de t que corta a distribuição
t com (n-1) graus de liberdade, no ponto (alfa/2). O
valor n é dado então pela expressão:
Uma vez que os valores de t1-alfa/2,n-1
dependem de n, é necessário usar um procedimento
iterativo. Primeiro determina-se um valor inicial de n
(n1). Utiliza-se Z1-alfa/2 neste primeiro passo, porque
não se tem um valor para n, para dar entrada na Tabela
de t. Uma vez encontrado um primeiro valor para n,
procura-se na Tabela t o valor correspondente, que vai
utilizar para encontrar um novo valor para n, que se
designa por n2. Uma vez encontrado n2, procura-se o
5º Ano Eng. Ambiente
A amostragem estratificada usa informação à
priori para dividir a população alvo em subgrupos
internamente homogéneos. Cada subgrupo (estrato) é
então amostrado por amostragem aleatória simples.
Seja N o número total de unidades de população na
população alvo. Estas n unidades são divididas em L
estratos tal que a variabilidade do fenómeno dentro de
cada estrato é menor do que na população inteira. Seja
N1, N2,..., NL o número de unidades de população em
cada estrato. O peso do h-ésimo estrato é dado por
Wh=Nh/N.
A média da população de N unidades é dada a
seguir, em que µh é a média verdadeira de cada
estrato:
A média µh é estimada seleccionando aleatoriamente
nh unidades do estrato h e fazendo
A média da população, µ, é dada pelo estimador:
Note-se que Xmédiaestrat é uma média
pesada, representando os Wh o tamanho relativo de
cada estrato. Se Nh/N= nh/n em todos os estratos, ou
seja, se a proporção de amostras colhidas no estrato h
é igual à proporção de N unidades nesse estrato
(afectação proporcional), então Xmédiaestrat reduzse à expressão seguinte que é a média aritmética dos n
dados colhidos em todos os L estratos:
10
Modelos de Simulação
Este tipo de abordagem é mais simples, mas
não é aconselhável se a variabilidade dos dados é
grande para os vários estratos, o que acontece com
frequência.
Uma vez que só algumas das unidades de
população em cada estrato foram medidas,
Xmédiaestrat tem uma variância, dada a seguir, se N é
muito grande, sendo s2h a variância em cada estrato:
Cap 1 – Modelos de Simulação em Ambiente
1.2.9 AMOSTRAGEM SISTEMÁTICA
Utiliza-se quando se pretende estimar
padrões de qualidade a longo prazo, definir
sazonalidades
ou
outros
ciclos
ou
prever
concentrações de poluição. É normalmente mais fácil
de implementar do que a amostragem aleatória. No
entanto, se a variável que está a ser medida tem algum
tipo de periodicidade ao longo do tempo e/ou espaço, a
amostragem sistemática pode dar estimativas
enviezadas ou mesmo erradas dos parâmetros da
população que pretendemos saber.
O total da variável em todos os estratos é
dado a seguir, sendo Nhµh o total em cada estrato h:
1.2.9.1 AMOSTRAGEM AO LONGO DE UMA
LINHA
O total I é estimado, usando a seguinte
expressão, onde Nhxhmédia é o total estimado em
cada estrato h:
Uma estimativa da variância é obtida por:
Considere-se a amostragem ao longo do tempo
numa estação de monitorização de poluição do ar, a fim
de se estimar a média anual de certo poluente. As
medições do poluente são feitas em filtros que
estiveram expostos ao ar durante 24 h, logo a
população alvo consiste em N=365 dias. A obtenção de
uma estimativa não enviezada para m pode ser obtida
através de uma amostragem sistemática.
Em primeiro lugar, escolhe-se um intervalo k (período
entre os tempos de recolha), por exemplo k=5. Então,
um número entre 1 e k, inclusive, é escolhido
aleatoriamente, por exemplo 3. Assim, a primeira
amostra de ar será colhida no dia 3 de Janeiro e as
seguintes em cada 5 dias, ou seja, nos dias 8, 13, 18,
23. O número total de observações para o ano é n=N/k,
que para este caso vem n=365/5=73.
1.2.8 AMOSTRAGEM POR COMPOSIÇÃO
Uma forma alternativa de estimar um
parâmetro de uma população consiste em coleccionar
um conjunto de unidades da população e misturá-las
numa amostra compósita. Esta amostra inteira é
medida, ou então uma ou mais sub-amostras aleatórias
são obtidas a partir da amostra compósita e medidas.
Se o processo de mistura está completo, as subamostras representam a concentração média das
amostras originais.
O processo de composição pode variar de caso
para caso, em função do objectivo do estudo. Por
exemplo, o processo de composição é diferente se se
pretende avaliar a variação da concentração de um
poluente no tempo ou no espaço, ou se se pretende
apenas estimar o valor médio da concentração desse
poluente na população.
5º Ano Eng. Ambiente
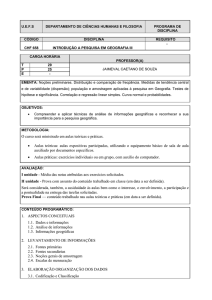
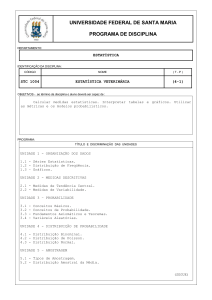
A figura ilustra a importância de se conhecer
o padrão de variação de uma variável antes de se
escolher o valor k. Trata-se de uma variação em onda
com um período igual a 30 dias.
Se k for igual a 30, como é ilustrado pelos
pontos de amostragem A, todos os valores obtidos
11
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
serão iguais. Neste caso, não há mais informação nas n
medições do que numa simples observação escolhida
aleatoriamente. Deste modo, a estimativa obtida será
enviezada a menos que por sorte o ponto de
amostragem cai sobre a linha do valor médio. Se k=15,
como ilustrado pelos pontos B da figura, os dados
obtidos pela amostragem sistemática terão a mesma
distância acima ou abaixo da média verdadeira. Neste
caso, x=µ e Var(xmédia)=0.
Verifica-se que, quando se pretende estimar o
valor médio de uma população, a estratégia a seguir na
escolha de k, é assegurar que todas as partes do ciclo
estão representadas. Por exemplo, se o ciclo é
semanal, todos os dias da semana deveriam estar
igualmente representados.
período. A média regional pode ser estimada através
de:
onde xij corresponde à j-ésima observação na estação
i e xmédiai é a média estimada para a i-ésima estação.
Assumindo que a variância ao longo do tempo
s2 é a mesma para cada estação e que os dados estão
correlacionados em termos espaciais mas não ao longo
do tempo e que as médias reais de cada estação µi são
iguais, a variância da média regional é dada pela
expressão:
1.2.9.2 AMOSTRAGEM DE UM ESPAÇO
onde rc é a média das ne(ne-1)/2 correlações cruzadas
entre as ne estações, onde -1/(ne-1) <= rc <= 1.
Para esta situação, o cálculo do número de
amostras a recolher por estação quando se
estabelecem o número de estações de amostragem,
para uma determinada exactidão e grau de confiança
dos dados d e Z1-alfa/2, respectivamente, pode ser
efectuado pela expressão:
Para determinar as unidades de população a
serem amostradas, primeiro escolhe-se a distância
entre as linhas e depois duas coordenadas são
escolhidas aleatoriamente para fixar a localização do
ponto inicial A. Os restantes pontos da grelha são
fixados pelas distâncias definidas previamente.
1.2.10 CORRELAÇÃO ESPACIAL E TEMPORAL
Correlação espacial
Muitos dos métodos utilizados para estimar o
número de amostras a serem recolhidas (n) assumem
que os dados não estão correlacionados. Na prática, a
correlação espacial pode existir e assim parte da
informação contida numa medição é também parte de
outras medições obtidas em distâncias próximas. Se se
recolherem n observações em cada uma das ne
estações ao longo do mesmo período de tempo de
forma a se estimar a média regional para esse mesmo
5º Ano Eng. Ambiente
Esta mesma expressão pode ser utilizada para
o caso em que se estabelece o número de amostras e
se pretende determinar o número de estações.
Na prática rc será normalmente superior a
zero. Porém, teoricamente rc pode ser negativo o que
resultaria em se recolherem menos amostras em
comparação com uma situação em que a correlação
espacial não é considerada. Neste caso recomenda-se
que se considere rc igual a zero ou se considere o seu
valor absoluto.
Correlação temporal
De forma a se estudar uma correlação
temporal é requerido que as amostras sejam
recolhidas em intervalos de tempo iguais (um caso de
amostragem sistemática).
Considere-se r1 como sendo a correlação da
população entre valores recolhidos com separação de
um intervalo, isto é, entre os valores x1 e x2, x2 e x3,
x3 e x4 etc. Considere-se igualmente r2 a correlação
entre valores recolhidos com separação de 2 intervalos
12
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
(x1 e x3, x2 e x4, etc.) e, em geral, rl, a correlação
entre valores recolhidos com separação de l intervalos,
em que -1 <= rl <=1. O conjunto {r1, r2, r3,...} denominase a função autocorrelação.
Assume-se que o processo em análise não
apresenta ciclos, não tem nenhuma tendência de longo
prazo e não apresenta saltos em magnitude ou mudança
da função autocorrelação ao longo do tempo.
O número de amostras para um determinado nível de
significância a e uma exactidão d é dado pela
expressão simplificada:
O inverso (calcular o número de estações
necessárias em função do número de amostras por
estação previamente fixado) é calculado usando a
seguinte fórmula:
Z1-alfa/2 tem uma distribuição normal padrão e
consequentemente assume-se que os valores recolhidos
têm igualmente uma distribuição normal.
A expressão utilizada para o cálculo do l-ésimo
intervalo de correlação rl é a seguinte:
1.2.12 MODELOS REGRESSIVOS
MULTIVARIADOS
1.2.12.1 REGRESSÃO LINEAR SIMPLES
Exemplo de cálculo de um coeficiente de
autocorrelação:
Considere-se a sequência de 5 medições 5, 3, 7, 4 e 10
recolhidas uma por mês durante cinco meses
consecutivos. Xmédia = 5.8. A autocorrelação estimada
para as medições distanciadas de 2 intervalos (l=2) é
dada por:
Estimativas de r1, r3 e r4 são obtidas da forma
semelhante. Na prática, pelo menos n = 50 valores são
necessários para se obterem estimativas exactas de rl
para intervalos l =1, 2,..., k, em que k não deve exceder
n/4.
1.2.11 CORRELAÇÃO ESPACIAL E TEMPORAL
No caso de se considerar que os dados estão
correlacionados simultaneamente em termos do espaço
e do tempo, o número de amostras a recolher por
estação (estando o número de estações previamente
fixado) pode ser calculado através da expressão:
5º Ano Eng. Ambiente
A
regressão
linear
simples
pretende
estabelecer uma possível relação linear entre duas
variáveis, x e y. Convencionalmente x é o predictor
(variável independente) e y o predictando (variável
dependente).
Quando se representam as duas variáveis x e
y através de um gráfico de dispersão, pretende-se,
através da regressão linear simples, sintetizar a
relação entre as duas variáveis, através de uma recta,
que é escolhida pelo método dos mínimos quadrados,
isto é, sendo aquela que minimiza a soma do quadrado
dos desvios.
Dada uma série de pares (x,y) pretende-se determinar
a recta
yˆ a bx
que melhor se ajusta às observações, i. e., que minimiza
os quadrados das distâncias verticais (linhas a
ponteado) entre os pontos (x,y) e a recta. O símbolo ^
indica que se refere ao valor previsto de y. As
distâncias verticais constituem os erros, e, definidos
por:
ei yi yˆ xi
13
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
A equação garante que é nulo o valor médio em
torno
do
qual
os
resíduos
se
distribuem
aleatoriamente. Cada resíduo observado pode assim
ser encarado como tendo sido obtido a partir de
distribuições condicionais dado o valor do predictor x.
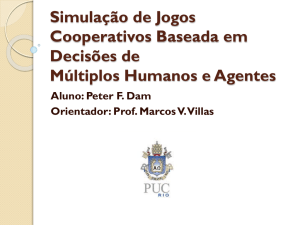
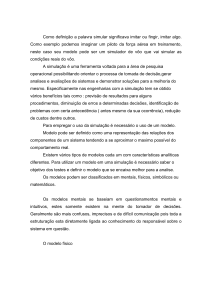
Regressão linear simples. A recta de
regressão, é escolhida de forma a minimizar as
diferenças verticais (erros) entre os pontos e a recta,
cuja soma se pretende minimizar na regressão por
mínimos quadrados. Em destaque mostra-se o erro, e,
que é dado pela diferença entre o ponto e a recta de
regressão. (Wilks, 1995).
Esquema da distribuição dos
resíduos
em
torno da recta de regressão (distribuições
condicionais dada a variável predictora x). (Wilks,
1995).
Combinando as expressões obtêm-se
yi yˆi ei a bxi ei
a e b são denominados coeficientes de regressão,
sendo b o declive da recta de regressão e a a média
da distribuição de probabilidade de y para x=0.
A soma do quadrado dos erros para uma amostra de
dimensão n vem dada pela relação:
2
n
ei
i 1
2
n
2
n
yi yˆi yi _a bxi
i 1
i 1
Note-se que a distribuição dos resíduos se
encontra menos dispersa (tem menor variância) que a
distribuição não condicional de y (i. e., distribuição de
y caso o valor de x não fosse conhecido).
Assume grande importância a determinação da
variância residual (constante) da amostra de resíduos,
que desde que esteja garantido o constrangimento
anterior, poderá ser estimada pela relação:
Resolvendo em ordem aos parâmetros b e a obtêm-se
finalmente:
n
b
xi
i 1
n
x yi y
xi
x
i 1
2
n
n
n
i 1
i 1
i 1
n xi yi xi yi
n
n
2
xi 2 xi
i 1
i 1
se2
onde a soma dos resíduos é dividida por n-2 por se
estar a estimar dois parâmetros (a e b). Substituindo
vem finalmente:
se2
a y bx
1.2.12.2 DISTRIBUIÇÃO DOS RESIDUOS
No método da regressão, as quantidades são
encaradas como variáveis aleatórias independentes,
com média zero e variância constante, sendo ainda, por
vezes, assumido que os resíduos têm uma distribuição
gaussiana. De facto,
n
e
i 1
i
1 n 2
ei
n 2 i 1
1 n
yi yˆxi
n 2 i 1
2
É útil decompor a variância total do
predictando y, S22, em duas componentes, S11 e S12 ,
respectivamente correspondentes à variância dada
pela recta de regressão e à variância dos resíduos, isto
é:
S22 S11 S12
0
5º Ano Eng. Ambiente
14
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
O termo S22 que representa a soma dos
quadrados
dos
totais
dos
desvios, consiste
matematicamente na soma dos quadrados dos desvios
de y em relação à respectiva média, i. é:
expressão que permite estimar Se2 sem necessidade
de calcular os valores previstos
.
2
n
1.2.12.3 REGRESSÃO LINEAR MULTIVARIADA
n
S22 yi yi yi2 ny 2
i 1
i 1
sendo de notar que é proporcional (por um factor de n1) à variância de y.
O termo S11 , que representa a soma dos
quadrados dos desvios da regressão é dado pela soma
dos quadrados dos desvios das previsões da regressão
em relação à média da amostra de y, isto é:
n
S11 yˆxi y
i 1
2
ou ainda, recorrendo à equação de regressão por:
n
S11 b 2 xi x
i 1
2
n
b 2 xi2 nx 2
i 1
que mostra que quando a recta de regressão diferir
pouco da média da amostra de y ter-se-á um valor
pequeno de S11 .
O termo S12, que representa a soma dos
quadrados dos erros vem dado pela a soma dos
quadrados entre os valores de y e os respectivos
valores previstos
yˆ xi , i.e.:
n
ŷxi
S12 ei n 2 se2
2
Pretende-se obter uma relação linear entre
um dado predictando y e um conjunto de p predictores
x1, x2, ..., x p . Considerando que se têm n
observações de p predictores, pretende determinarse:
yi a b1 xi1 b2 xi 2 .... b p xip ei
i = 1,...., n
Com, a representa o valor médio da
distribuição de probabilidade para o pto x 0,0,0,..., 0
e o parâmetro bj representa a taxa de variação da
média por unidade de crescimento de xij , quando xik
(com kj) são constantes. Neste caso, os desvios
xX X
e
y Y Y
são representados por matrizes nxp e nx1 ,
respectivamente, em que cada coluna representa o
desvio em relação à média da correspondente variável
original. As matrizes de variância-covariância são
definidas pelas relações:
S11
1
x' x
n
S12 S 21 '
S 22
1
x' y
n
1
y' y
n
em que ( )' representa a matriz transposta. Note-se
que a matriz S22 representa a variância da variável
dependente, y (y2 ).
i 1
Combinando vem
1
S 22 S11
s
n2
ou
2
e
se2
n
1 n 2
2
2
y
n
y
b
xi2 nx 2
i
n 2 i 1
i 1
5º Ano Eng. Ambiente
A equação de regressão múltipla é dada pela relação:
1
1
Yˆ XS11 S12 XS11 S12 Y
Convém ainda definir a redução de variância
(RV) e o coeficiente de correlação múltipla (R) dados
por:
n
1 n
Yi Y 2 1 Yi Yˆ
n
n i 1
RV R 2 i 1
n
1
Yi Y 2
n i 1
15
2
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
i.e.,
previamente transformado num binário (série que toma
apenas um de dois valores - 0 ou 1 - conforme os
respectivos valores originais se situarem abaixo ou
acima de um dado valor crítico). A nova variável pode
ser construída a partir do predictando original, de
acordo com a transformação:
RV R 2
variância de y - erro médio quadrático de y
variância de y
Note-se que estas quantidades se podem
facilmente calcular utilizando as matrizes atrás
definidas:
1
1
S S S
S S S
RV R 21 11 12 21 112 12
S 22
ˆ y
2
tendo-se que 0 R 2 1 . R2 assume os valores 0 e 1
respectivamente quando todos os coeficientes forem
nulos e quando todas as observações são
ˆ , para
perfeitamente ajustadas, i.e., quando yi y
todos os valores de i. Note-se que um valor elevado de
R2 não implica necessariamente que o modelo ajustado
seja de boa qualidade pois esta situação pode ficar a
dever-se ao facto dos predictores serem em número
demasiado elevado (overfitting).
Em certas condições, a análise de variância
pode ser ainda utilizada para testar a significância de
cada um dos parâmetros individuais da equação de
regressão, nomeadamente na determinação de qual dos
predictores acrescenta informação predictiva.
A regressão linear pode ser utilizado, para
todo o tipo de distribuição dos predictores e
predictandos, exceptuando-se o caso em que um
predictor vem dado por uma combinação linear de um
ou mais predictores. Nesta situação, a inversa de não
pode ser determinada, por se tratar de uma matriz
singular. Refira-se ainda que o modelo aqui descrito se
diz linear, pelo facto de a função a ajustar ser uma
combinação linear dos predictores;
1.3 PREVISÕES DE PROBABILIDADE DE
OCORRÊNCIA
Uma vantagem da previsão estatística sobre a
previsão dinâmica (determinista) é a capacidade de se
produzirem previsões de probabilidade, i.e., previsões
que exprimem, de forma explícita, o grau de incerteza
ou desconhecimento acerca do futuro.
A previsão de probabilidade é um tipo de previsão em
q. o predictando é a probabilidade de ocorrência de um
dado acontecimento.
Geralmente, os sistemas que produzem
previsões de probabilidade são desenvolvidos a partir
de equações de regressão, em que o predictando foi
5º Ano Eng. Ambiente
1 se y1 c
y2
0 se y1 c
onde c é o valor crítico.
O procedimento descrito, em que a equação de
regressão é obtida a partir de um predictando binário
é usualmente designado regressão para estimação de
iguais probabilidades. Neste caso os valores previstos
resultantes apresentam geralmente valores entre 0 e
1.
1.3.1 PREVISÕES CATEGÓRICAS
Denomina-se previsão categórica aquela em
que se prevê a ocorrência de um só acontecimento, de
um dado conjunto de acontecimentos possíveis.
Quando se dispõe de um modelo de probabilidade de
ocorrência, é possível proceder ao desenvolvimento de
um modelo de previsão categórica através da
conversão das probabilidades de ocorrência em 2
categorias distintas mediante a escolha de c, abaixo
do qual a previsão categórica será "não ocorrência" e
acima do qual será "ocorrência".
Note-se que a escolha desse valor crítico
depende da utilização da previsão, assim como de
outros problemas específicos relacionados com a
previsão.
Existem diferentes possibilidades para a
escolha daquele patamar de probabilidade, resultando
de cada uma das escolhas diferentes resultados. Um
primeiro procedimento consiste em prever o
acontecimento mais provável, o que corresponde a
seleccionar um patamar de probabilidade de 0.50.
Outro procedimento consiste em utilizar a frequência
relativa climatológica do acontecimento a prever. Há
mais procedimentos, frequentemente utilizados para
escolher o patamar de probabilidade, alguns dos quais
se baseiam no viés (B), devendo escolher-se o patamar
que produz, tanto quanto possível, B 1 .
1.3.2 VERIFICAÇÃO DA PREVISÃO
Constitui um processo para determinar a
qualidade da mesma e envolve a investigação das
16
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
propriedades da distribuição conjunta de previsões e
observações.
O skill é geralmente apresentado na forma de um skill
score (SS), interpretado como uma percentagem de
melhoramento, o qual é caracterizado por uma medida
particular de exactidão (accuracy) A, em relação à
exactidão da série de referência, isto é:
1.3.3 PREDICTANDOS CONTÍNUOS
A) Erro absoluto médio (EAM).
O erro absoluto médio é dado pela média
aritmética dos valores absolutos das diferenças entre
valores previstos e observados, sendo definido pela
relação:
EAM
1 n
yk ok .
n k 1
onde é o k-ésimo par de n pares de previsões e
observações. O EAM é zero no caso de uma previsão
perfeita e cresce quando aumentam as discrepâncias
entre previsões e observações.
B) Erro quadrático médio (EQM).
O erro quadrático médio (EQM) é dado pela
média aritmética dos quadrados das diferenças entre
valores previstos e observados, sendo definido pela
relação:
EQM
1 n
yk ok .2
n k 1
O EQM é mais sensível aos erros maiores do
que o EAM, crescendo desde zero para previsões
perfeitas até valores cada vez mais elevados conforme
aumentam as diferenças entre previsões e
observações. Por vezes, define-se a raiz do erro
quadrático médio (REQM) dado pela relação:
REQM EQM
que tem a mesma dimensão física que as previsões e as
observações e pode ser encarado como fornecendo a
magnitude típica dos erros.
C) Skill Scores.
O skill refere-se à exactidão relativa de uma
dada série de previsões em relação a uma série de
previsão de controlo ou de referência. As escolhas
mais usuais para as séries de referência são a média
climatológica dos valores do predictando, a
persistência da previsão (valores do predictando num
período anterior) ou previsões aleatórias (com respeito
à frequência relativa climatológica dos acontecimentos
previstos).
5º Ano Eng. Ambiente
SS ref
A Aref
Aperf Aref
100%
onde Aperf é o o valor de medida da exactidão que
seria encontrada numa previsão perfeita.
Se A = Aperf, o skill score assume o valor
máximo de 100%. Se A = Aref,, então Ssref = 0%, o
que indica que não houve melhoramento em relação a
previsão de referência. As medidas de exactidão a
utilizar podem ser facilmente construídas utilizando
quer o EQM, quer o EAM, sendo-se conduzido, no
primeiro caso, às relações:
2
1 n
(a) EQM c lim o ok
n k 1
2
(b) EQM pers
1 n
ok 1 ok
n k 1
onde os índices clim e pers se referem
respectivamente à climatologia e à persistência e
representa um valor médio climatológico das
observações. Neste caso, o Skill Score será dado pela
fórmula:
SS c lim
EMQ EMQc lim
EMQ
1
0 EMQc lim
EMQc lim
visto serem nulos quer o EQM, quer o EAM de uma
previsão perfeita.
1.3.4 PREVISÕES DE PROBABILIDADE DE
OCORRÊNCIA
A previsão de probabilidade de ocorrência é
usualmente formulada e verificada para predictandos
discretos e, em geral, para acontecimentos
dicotómicos, i.e., para situações em que um dado
acontecimento ocorre ou não ocorre.
A) Brier Score.
Para
a
probabilidade de
verificação
ocorrência
de
modelos
de
de acontecimentos
17
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
dicotómicos podem definir-se diversas medidas de
exactidão sendo a mais comum o Brier Score (BS);
este índice consiste essencialmente na determinação
do erro quadrático médio da previsão de probabilidade,
considerando que a observação assume os valores 1 ou
0, caso os acontecimentos respectivamente tenham
ocorrido ou não.
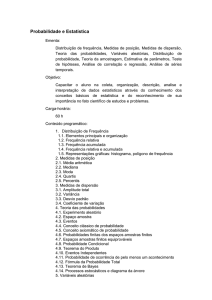
Na figura apresentam-se 6 casos típicos de
gráficos de fiabilidade, que ilustram o modo como se
podem diagnosticar diversos tipos de relação entre
previsões e observações. Em cada caso, igualmente se
apresenta um histograma de frequências relativas para
as diferentes classes de valores previstos.
a fig. a) mostra o caso elementar de uma
previsão climatológica, onde é sempre previsto
um único valor de probabilidade de ocorrência,
indicado no gráfico por um ponto e no
histograma por uma única barra, caso este em
que se tem uma fiabilidade perfeita, mas sem
resolução (skill).
as restantes figuras mostram casos em que
são
previstas
classes
distintas
de
probabilidade de ocorrência.
as previsões, na fig b), são de pouca
fiabilidade e de resolução pobre;
a fig. c), em que as frequências para as
classes de acontecimentos previstos são
idênticas às do caso anterior, já apresenta
melhores resultados, tendo-se obtido uma boa
resolução, mas um viés permanente, indicativo
de uma subestimação (undeforecasting).
a previsão da fig. d) mostra uma óptima
resolução obtida à custa de uma degradação
da fiabilidade, dado que se tem uma
sobrestimação das pequenas probabilidades e
uma subestimação das grandes probabilidades.
e) e f) ilustram respectivamente uma
previsão bem calibrada para acontecimentos
raros e outra em que a verificação dos dados
está limitada pelo comprimento reduzido da
amostra utilizada.
Tem-se que:
2
1 n
BS yk ok ,
n k 1
em que o indice k indica o par previsão/observação.
Para previsões perfeitas BS = 0, enquanto as previsões
menos precisas têm um valor mais elevado do Brier
Score, tendo-se que o Brier Score toma apenas valores
no intervalo 0 BS 1
Podem construir-se skill scores da seguinte
forma:
SS
BS BS ref
0 BS ref
1
BS
BS ref
sendo de notar que BSperf = 0. Normalmente, tomamse para valores da previsão de referência as
frequências relativas da climatologia.
B) Gráfico de fiabilidade.
O gráfico de fiabilidade é utilizado na
representação gráfica do desempenho (perfomance) da
previsão de probabilidade de acontecimentos
dicotómicos. Trata-se de um gráfico de frequências
relativas observadas de ocorrência versus valores
previstos de probabilidade de ocorrência. A curva
obtida deverá ser comparada com a linha diagonal que
representa a linha de fiabilidade perfeita.
1.3.5 PREVISÕES CATEGÓRICAS
A) Tabelas de contingência
A verificação de previsões categóricas,
formulada a partir de tabelas de contingências,
contem os valores das frequências absolutas (ou
relativas)
do
conjunto
de
possíveis
pares
previsão/observação.
Para previsões binárias, têm-se tabelas de
entradas respectivamente correspondentes aos pares
observados/previstos, observados/não previstos, não
observados/previstos e não observados/não previstos.
5º Ano Eng. Ambiente
18
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
Tabelas de contingência para previsões categóricas
binárias.
Note-se que POD = 1 para previsões perfeitas
e POD = 0 para previsões totalmente incorrectas.
O falso alarme (false alarm ratio, FAR) representa a
proporção de acontecimentos previstos que não
aconteceram, sendo dado pela relação:
FAR
b
ab
Neste
caso,
as
melhores
previsões
correspondem a valores pequenos de FAR, o qual
percorre o intervalo de 0 (previsão perfeita) a 1.
O viés (bias, B) permite comparar o número de
vezes em que o acontecimento foi previsto com o
respectivo número de vezes em que ocorreu, isto é:
Na tabela da esquerda, as letras a a d
correspondem às frequências absolutas dos 4 possíveis
pares previsão/observação; igualmente se apresentam
as frequências absolutas marginais a+c e b+d dos casos
observados e a+b e c+d dos casos previstos. Na tabela
da direita apresentam-se os respectivos valores
formulados em termos de
frequências
relativas, sendo de notar que o comprimento da
amostra é n=a+b+c+d. (Wilks).
B) Medidas de exactidão para previsões binárias.
Note-se que, para previsões categóricas
binárias perfeitamente exactas se tem b = c = 0.
A medida de exactidão mais imediata para o caso de
previsões categóricas binárias é dada pela taxa de
sucesso (hit rate, H) definida pela relação:
H
Um valor de B maior que a unidade indica que o
acontecimento foi sobrestimado, i.e., foi previsto mais
vezes do que na realidade ocorreu (overforecasting) e
um valor de B menor que a unidade indica que o
acontecimento foi subestimado (underforecasting).
Exercício 1
ad
n
a qual satisfaz ao princípio de equivalência dos
acontecimentos,
dado
que
são
contabilizadas
(penalizadas), com igual peso as previsões correctas
(incorrectas), sendo de notar que os valores percorrem
o intervalo de 0 (previsão totalmente incorrecta) a 1
(previsão perfeita). Por vezes, os valores de H vêm
multiplicados por 100, sendo então expressos como
percentagens de previsões correctas (PFC).
Uma outra medida de exactidão é a
denominada probabilidade de detecção (probability of
detection, POD), que representa a fracção de vezes
em que o acontecimento ocorrido foi, de facto,
previsto:
POD
5º Ano Eng. Ambiente
a
ac
ab
ac
B
Total
2
2
Yi
Xi
XiYi
Xi
73
30
2190
900
5329
50
20
1000
400
2500
128
60
7680
3600
16384
170
80
13600
6400
28900
Yi
87
40
3480
1600
7569
108
50
5400
2500
11664
135
60
8100
3600
18225
69
30
2070
900
4761
148
70
10360
4900
21904
132
60
7920
3600
17424
1100
500
61800
28400
134660
Exercício 2
Distritos
Vendas
População Alvo
Receitas
1
162
274
2450
2
120
180
3254
3
223
375
3802
4
131
205
2838
5
67
86
2347
6
169
265
3782
7
81
98
3008
8
192
330
2450
9
116
195
2137
10
55
53
2560
11
252
430
4020
12
232
372
4427
13
144
236
2660
14
103
157
2088
15
212
370
2605
19
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
EXERCÍCIO 1
» load exer1.txt
» Y=exer1(:,1)
» b=inv(X'*X)*(X'*Y)
b=
Y=
10.0000
2.0000
73
50
128
170
87
108
135
69
148
132
»
» X(:,1)=exer1(:,2);
» X(:,2)=exer1(:,3);
»X
X=
1
1
1
1
1
1
1
1
1
1
30
20
60
80
40
50
60
30
70
60
274
180
375
205
86
265
98
330
195
53
430
372
236
157
370
2450
3254
3802
2838
2347
3782
3008
2450
2137
2560
4020
4427
2660
2088
2605
» X(:,1)=[1 1 1 1 1 1 1 1 1 1 1 1 1 1 1]';
» X(:,2)=rec(:,3);
» X(:,3)=rec(:,4);
»X
X=
» X'*X
ans =
10
500
EXERCÍCIO 2
» clear all
» load receitas.txt
» rec=receitas
rec =
1
162
2
120
3
223
4
131
5
67
6
169
7
81
8
192
9
116
10
55
11
252
12
232
13
144
14
103
15
212
500
28400
» inv(X'*X)
ans =
0.8353 -0.0147
-0.0147 0.0003
» X'*Y
ans =
1100
61800
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
274
180
375
205
86
265
98
330
195
53
430
372
236
157
370
2450
3254
3802
2838
2347
3782
3008
2450
2137
2560
4020
4427
2660
2088
2605
» Y=rec(:,2)
5º Ano Eng. Ambiente
20
Modelos de Simulação
Y=
162
120
223
131
67
169
81
192
116
55
252
232
144
103
212
» X'*X
ans =
15
3626
44428
Cap 1 – Modelos de Simulação em Ambiente
3626
44428
1067614 11419181
11419181 139063428
» inv(X'*X)
ans =
1.2463 0.0002 -0.0004
0.0002 0.0000 -0.0000
-0.0004 -0.0000 0.0000
» X'*Y
ans =
2259
647107
7096619
» b=inv(X'*X)*(X'*Y)
b=
3.4526
0.4960
0.0092
5º Ano Eng. Ambiente
21
Modelos de Simulação
1.4
MODELOS DINÂMICOS
O desenvolvimento de computadores de alta
velocidade tem tido um grande impacto na resolução de
problemas de mecânica de fluidos e transferência de
calor. Os problemas que antes eram resolvidos em anos
de trabalho, são-no agora, em poucos segundos de
tempo de computador.
Tem-se verificado um importante crescimento
de novas metodologias de ataque aos complexos
problemas de mecânica de fluidos e transferência de
calor, que têm sido designadas por dinâmica de fluidos
computacional (Computacional Fluid dynamics - CFD).
Nesta aproximação computacional (numérica) as
equações que governam os processos de interesse são
resolvidas numericamente.
Algumas das ideias envolvidas são muito
antigas. O desenvolvimento dos métodos numéricos,
especialmente os métodos de diferenças finitas para a
resolução de equações diferenciais parciais e
ordinárias começou há cerca de um século. O primeiro
computador automático foi inventado na década de 30,
mas só com o aparecimento dos computadores de alta
velocidade se deu a explosão da actividade
computacional.
Tradicionalmente, os métodos teóricos e
experimentais eram utilizados para o desenvolvimento
de equipamentos, mas com o aparecimento dos
computadores surge um terceiro tipo de aproximação:
os métodos numéricos.
Os métodos experimentais continuam a ser
muitíssimo
importantes,
especialmente
quando
envolvem fluidos muito complexo, apesar de se
verificar uma tendência cada vez mais significativa de
um uso cada vez mais extensivo dos métodos
numéricos.
O método teórico é muitas vezes referido como uma
aproximação analítica, enquanto que se utilizam as
expressões métodos numéricos e computacionais de
forma indiferenciada.
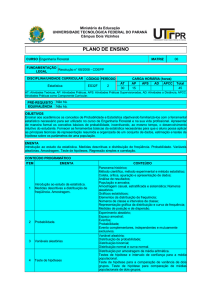
Cap 1 – Modelos de Simulação em Ambiente
A figura ilustra a comparação entre os
métodos teórico, experimental e numérico na resolução
do problema do cálculo da pressão de um cilindro
circular.
Diferenças Finitas
Objectivo: Obtenção de soluções discretas e
aproximadas de equações envolvendo operações
aritméticas simples.
Formulação
Definição do
domínio computacional
e da malha
Sistemas de equações
algébricas
Algoritmo de solução
5º Ano Eng. Ambiente
22
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
Equações diferenciais
Pretende-se
transformar
a
equação
diferencial numa equação algébrica através da
expansão em séries de Taylor ou por aproximação
polinomial, ou ainda utilizando o método do Volume de
Controlo.
O domínio contínuo é substituído por lugares
discretos e o tempo por intervalos de tempo t
As derivadas são aproximadas por um
quociente de adições e subtracções.
As aproximações numéricas aplicadas a todos
os pontos conduzem a um conjunto de equações
resolvidas para cada intervalo de tempo.
O sistema de equações resolve-se por
métodos directos ou interactivos.
1.4.1
ESCOLHA DA MALHA
Séries de Taylor.
Em geral a escolha da malha é influenciada
pela forma das fronteiras do domínio do
escoamento.
A complexidade da solução aumenta com a
generalidade da malha e sua irregularidade.
Alguns tipos de malha só podem ser
extensíveis a 3-D dimensões com extremas
dificuldades (por exemplo a malha geral
ortogonal).
Diferenças a Jusante (precisão de 1ª ordem em x)
f i 1 j f ij
2 f
f
O
x
,
x
x 2
x ij
Diferenças a Montante (precisão de 1ª ordem em x)
f ij f i 1 j
2 f
f
O x, 2
x
x
x ij
Diferenças Centrais (precisão de 2ª ordem em x)
f i 1, j f i 1, j
3 f
f
O x 2 , 3
2x
x
x ij
Diferenças Centrais (precisão de 2ª ordem em x)
2 f
2
x
f
2 f ij f i 1, j
2 4 f
i 1, j
x , 4
O
x 2
x
ij
Diferenças Centrais (precisão de 4ª ordem em x)
f i 1, j f i 1, j 1 f i 2, j f i 2, j
5 f
f
3
O x 4 , 5
43
2x
4x
x
x ij
5º Ano Eng. Ambiente
23
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
Diferenças a Jusante (precisão de 1ª ordem em x)
2 f
2
x
f
2 f i 1, j f ij 3 f
i 2, j
3
2
x
ij
x
x
ij
Diferenças a Jusante (precisão de 2ª ordem em x)
f i 2, j 4 f i 1, j 3 f ij
2 3 f
f
O x , 3
2x
x
x ij
5º Ano Eng. Ambiente
24
Modelos de Simulação
5º Ano Eng. Ambiente
Cap 1 – Modelos de Simulação em Ambiente
25
Modelos de Simulação
1.4.2
Cap 1 – Modelos de Simulação em Ambiente
APROXIMAÇÃO POLINOMINAL
Consiste em aproximar uma função dos pontos
da malha, derivando em seguida a função obtida.
Exemplo:
f i 1 a bx cx 2
f ( x) a bx cx 2 f i a
2
f i 1 a bx cx
c
f i 1 f i 1 2 f i
2x 2
b
f i 1 f i 1
2x
Nota: As discretizações apresentadas para as
derivadas espaciais aplicam-se de forma semelhante
para as derivadas temporais.
1.4.3 MÉTODO DO VOLUME DE CONTROLO
a fi
Vantagens: Este método baseia-se nas leis de
conservação macroscópicas, em vez de leis válidas para
volumes de controlo infinitesimal.
Equação de transporte de :
u j
t
x j
x j
2
f ( x) a bx cx
f
f i 1 f i 1
b 2cx x 0 b
x
2x
i
2 f
f f 2 fi
2 2c i 1 i 21
x
x i
F
x
j
Integrando no Volume de Controlo em torno do ponto
(i,j,k), obtêm-se
DIFERENÇAS CENTRAIS (*)
DIFERENÇAS CENTRAIS
vc
dv
t
x j
vc
u j dv
F dv
x
j
vc
Aplicando o Teorema da Divergência, vem
(*) Para o cálculo de f x
as
diferenças
centrais são exactas em
polinómios do 2º grau (o erro de truncatura é
3 f
).
O x 2 ,
u j .n j dS
dv
F dv
sc
t
x j
vc
vc
x 3
Com um polinómio de 1º grau f=a+bx, obtêm-se
diferenças a montante ou a jusante, consoante os
2
2
pontos i e i-1 ou i e i+1. Para obter f x
necessário calcular primeiro f x i 1 2 e f x i 1 2
fluxo convectivo de
fluxo difusivo de
Para polinómios de grau > 2, as equações
obtidas não são semelhantes às obtidas em séries de
Taylor.
À medida que a ordem do polinómio aumenta, a
aproximação torna-se mais sensível a erros de pequena
amplitude e o cálculo das derivadas pode originar
valores absurdos.
5º Ano Eng. Ambiente
26
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
O princípio de conservação expresso pela
equação diferencial é satisfeito na forma de um
balanço macroscópico no VC.
limite quando t, x, y, z tendem para zero, a
equação das diferenças finitas é igual à equação
diferencial original em cada ponto do domínio.
Para fazer a análise de consistência, substitui-se na
equação de diferenças finitas, cada variável pelo
desenvolvimento em série de Taylor em torno do ponto
(i,j,k). A diferença entre a equação diferencial obtida
e a equação diferencial original, designa-se por erro de
truncatura da discretização.
Exemplo:
2
t
x 2
A equação é a expressão matemática da
seguinte lei de conservação:
Taxa de variação de no VC = fluxo convectivo e
difusivo de através das faces do VC +
produção/dissipação.
O método do Volume de Controlo quando
comparado com os outros métodos, tem a vantagem de
ser um método conservativo, i.e., satisfaz a lei de
conservação expressa matematicamente pela equação
anterior.
Para que a propriedade conservativa seja
satisfeita é necessário que os fluxos através das
superfícies dos volumes de controlo adjacentes sejam
calculadas da mesma forma, pois os fluxos contribuem
com sinais opostos (entrada e saída) no interior do
domínio e a sua soma anula-se. A satisfação desta
propriedade depende também da forma da equação
diferencial.
1.4.4
CRITÉRIOS
A
DISCRETIZAÇÃO
CONSIDERAR
NA
1. Consistência
2. Convergência
3. Estabilidade
Há ainda outras propriedades, tais como a
propriedade transportativa e conservativa e a
positividade, que não serão consideradas no âmbito
desta disciplina.
1.4.4.1
CONSISTÊNCIA
Uma equação de diferenças finitas diz-se
consistente com a equação diferencial que lhe deu
origem, se o erro de truncatura local tende para zero
quando os incrementos t, x, y, z tendem para
zero, independentemente da forma como o fazem. No
5º Ano Eng. Ambiente
Discretização
ti 1 ti
t 2 ti ti 1
i 1
t
x 2
ti 1 d ti 1 (1 2d ) ti d ti 1
com d
t
x 2
Fazendo uma análise de consistência o erro de
truncatura é:
t
t
t 2
x 4
4 O t 2 , x 4
E 2
2 t i
12 t i
lim E 0
Como
x , t o
finitas é consistente.
a
equação
de
diferenças
A consistência é condição necessária, mas não
suficiente de convergência. No exemplo anterior se
d=1, a solução da equação de fierenças finitas diverge
(o esquema não é estável). Quando a consistência não
se verifica a equação de diferenças finitas pode
convergir para a solução de outra equação diferencial
ou pode divergir.
Exemplo
u 2
2
t
x
x
u i 1 u i 1 ti 1 ti 1 ti 1 ti 1
ti 1 ti 1
2t
x 2
x 2
t
t
27
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
2
4
4
t 2 3 ux 2 3
x 2 4
t t
E
....
2
6 t 3
6 t 3
12 t 4
12 x 2 t 4
x t
2
Como
lim E 0
x , t o
se e só se
(FIGURA)
t
0
x , t o x
lim
Se isto não se verificar a equação de
diferenças finitas é consistente com a equação
diferencial
2
u 2
t
2
2
t
x
x
x t
2
Os erros referem-se ao erro de discretização
e ao erro de arredondamento, o qual resulta do
computador utilizar um número finito de dígitos.
erro
1
1.4.4.2 CONVERGÊNCIA
A solução de uma equação de diferenças
finitas é convergente se em cada nó da malha tender
para a solução da equação diferencial, quando t, x,
y, z tendem para zero. A verificação da
convergência só é possível quando a equação
diferencial tem solução exacta. Neste caso, a
convergência pode ser testada utilizando malhas com
resolução progressivamente maiores. Na maioria dos
casos, recorre-se ao Teorema de Lax.
Teorema de Lax: Estabilidade e consistência são
condições necessárias e suficientes para a
convergência de um sistema linear de equações.
Na maioria dos casos o sistema de equações
não é linear pelo que o teorema de Lax não pode ser
aplicado rigorosamente. Neste caso, o teorema de Lax
dá-nos condições necessárias, mas nem sempre
suficientes, de convergência.
1.4.4.3
ESTABILIDADE
Um esquema numérico é estável se os erros
introduzidos numa iteração não se amplificam no
decorrer do cálculo. Dos métodos tradicionais para
testar a estabilidade destacam-se: método de von
Neumann e método da matriz
5º Ano Eng. Ambiente
2
solução analítica da equação diferencia l
solução numérica exacta dígitos infinitos
solução numérica aproximada número finito de dígitos
1 erro de discretiza ção
2 erro de arredondam ento
1.4.5
MÉTODO DE VON NEUMAN
Este método baseia-se no facto de qualquer
função poder ser representada por uma série de
Fourier.
Para equações lineares de coeficientes
constantes em meios infinitos, este método dá
condições necessárias e suficientes de estabilidade,
que se verificam desde que nenhuma das componentes
de Fourier se amplifique durante o cálculo. Na prática
os problemas envolvem não linearidades, coeficientes
variáveis e condições fronteira complexas, pelo que
este método só pode ser aplicado localmente e
desprezando as não linearidades. Para esta situação
mais geral, o método de von Neumann fornece
condições necessárias, mas nem sempre suficientes, de
estabilidade.
No caso de equações algébricas lineares
resultantes da discretização o erro satisfaz a mesma
equação utilizada para . Também no caso de equações
lineares as diferentes componentes da série de
Fourier do erro, podem ser analisadas separadamente.
Visto que se está a estudar uma solução numérica
obtida por um cálculo discretizado numa malha, a série
de Fourier está limitada por 2 modos extremos:
28
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
Visto que para definir uma onda é necessário,
no mínimo 2 pontos, o comprimento de onda máximo é
2x e o c.d.o. máximo é 2L, sendo L o comprimento do
domínio.
A equação (*) pode generalizar-se a um
problema multidimensional. A série de Fourier do erro
toma a forma:
m
m
m
n
n 1
n
n
n 1
t
ijk
at e
m
it a t e Ik x a t e Ik ix a t e Ii
n
(*)
n
n
n 1
I - 1
2
n
com k n
(nº de onda da componente n)
kn
2
L
n
L
L
x
n
n k n x (ângulo de fase da componente n)
n
Para o nível temporal t+1 pode escrever-se
uma equação idêntica
m
it 1 a t 1e Ii
n 1
n
n
n 1
G
t 1
n
t
n
a
a
1
n
No caso de um sistema de equações, G
representa a matriz de amplificação e a condição de
estabilidade é então:
i 1
i valores próprios da matriz G
5º Ano Eng. Ambiente
Para além de permitir fazer uma análise de
estabilidade (erro de amplitude), o método de von
Neumann dá também informações sobre os erros de
fase.
O módulo de G é uma medida de
amortecimento ou amplificação da solução (análise de
estabilidade e o argumento de G dá-nos a realção
entre a velocidade de fase numérica (Un) e teórica (U).
Assim, para a componente n do erro pode-se escrever
int An e I kn x wnt
, pelo que o factor
de amplificação vem
G
O método é estável se o factor de
amplificação (pode ser um número complexo) for
menor ou igual à unidade para qualquer componente n,
ou seja
I nxi ny j nzk
n
int 1
e Iw t
t
in
n
A razão entre a velocidade de fase numérica e teórica
é:
U n wn k n
twn
N
U
U
Ukn x
c n
2 C
sendo
arg G,
C U
t
(nº de Courant)
x
,N
Regra geral verifica-se que quanto maior for o
nº de Courant (C) e menor o nº de pontos por c.d.o. (N),
maior será o erro de fase. Para a solução exacta todas
as componentes de Fourier propagam-se com igual
velocidade de fase, o que não acontece na solução
29
n
x
Modelos de Simulação
Cap 1 – Modelos de Simulação em Ambiente
numérica, onde a velocidade de fase varia com o c.d.o.
e o nº de Courant.
1.4.6
MÉTODO DA MATRIZ
Este método é menos popular que o anterior
devido à sua complexidade mas tem, em relação ao
Método de von Neumann, a vantagem de não ignorar as
condições fronteira.
Nesta técnica exprime-se na forma matricial o
conjunto de equações discretizadas aplicadas ao erro.
Em seguida determinam-se os valores próprios desta
i 1
matriz e impõe-se
.
A condição de
estabilidade que daqui decorre mostra em que
situações o erro não se amplifica.
5º Ano Eng. Ambiente
30