7D
ERIVADOR E I NTEGRADOR
Neste capítulo estudaremos circuitos com capacitores, onde comportamento varia ao longo do tempo e depende da freqüência. Portanto a análise destes circuitos deve ser feita no
domínio do tempo e, principalmente,
no domínio da freqüência.
Lista de material:
Semicondutores
1...LM741C
Resistores (1/4W, 5%).
2...2k
2...10k
2...100k
1...1M
Capacitores de poliester metalizado
(±10% - código K ou ±5% - código J)
2...10nF (0,01µF ou 10.000pF)
2...100nF (0,1µF)
Experiência 1- Derivador
R f =100k
Vi
~
Rs
Ci
10k
10nF
Vo
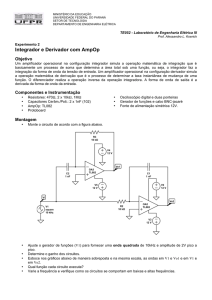
Fig. 1- Derivador
Formulário
Td = R f Ci
Vo = −Td
[Hz]
Etapa 1- Montar o circuito conforme
o diagrama esquemático da Figura 1.
Etapa 2- Ajustes iniciais.
• Osciloscópio
CH1=0,5V/DIV. DC; POS. CENTRAL.
CH2=0,5V/DIV. DC; POS. CENTRAL.
MODO=CHOPPER
BASE DE TEMPO=1mS/DIV.
TRIGGER=CH1; SLOPE+; AUTO,
• Gerador de funções:
TRIANGULAR; 1Vpp; 250Hz
Etapa 3- O sinal de saída, visto
através de CH2, é uma onda quadrada
com amplitude de 0,5V de pico e com
característica inversora. No intervalo
onde o sinal de entrada aumenta, o
sinal de saída é negativo. No outro
intervalo, para Vi diminuindo, Vo é positivo. Conforme a teoria, para:
-
+
Vo ( t ) = − R f Ci
1
[rad / s]
Td
1
1
fd =
=
2πTd 2πR f Ci
ωd =
∆Vi=1V, ∆t=2ms e
Td=100kΩ.10nF=1ms
Vo=0,5V
OBS: esta tensão deve ser medida em
relação ao ZERO e não pico a pico.
Vo pico medido =
d
d
Vi ( t ) = − Td . Vi ( t )
dt
dt
∆Vi
∆t
EFEI - IEE/DON Kazuo Nakashima
Td =
[V]
∆t
V
∆Vi o
Td =
[ms]
2
Experiências com Amplificadores Operacionais - Derivador e Integrador
1/ T
250.0 Hz
Trig
-0.30 V
consecutivos: BASE DE TEMPO=50µ
S/DIV.
CH1
∆t =
[µs]
[kHz]
fosc = 1 / T =
Trig
0.5V
0.5V
-0.30 V
CH1
1ms
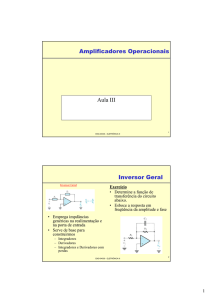
Figura 2- Oscilograma do Derivador
Etapa 4- Se aumentarmos a freqüência para 500Hz diminuiremos ∆t
para 1ms e, consequentemente, aumentaremos a amplitude do sinal de
saída para Vopico=1V.
0.5V
Vo pico medido =
[V]
Etapa 5- Curto-circuitar Rs=10kΩ.
Você deverá estar observando uma
grande oscilação no sinal de saída, típico de um comportamentos instável.
A freqüência de oscilação é determinada pela seguinte equação:
Etapa 6- Retire o "jump" de Rs. O
circuito volta a operar estavelmente.
BASE DE TEMPO=1mS/DIV.
O resistor Rs é o responsável pela
constante de tempo observada na
onda retangular de saída e pela freqüência de corte
Tc = Rs .Ci
1
fc =
2πRsCi
f c =1/2π.10kΩ.10nF=1,592 kHz
Esta freqüência de corte deve ser
menor que a freqüência de oscilação
que ocorre sem este resistor.
f d . f u onde f u = GBP
Considerando
GBP=1MHz
fd=159,2Hz, teremos fosc=12,6kHz.
e
Meça a freqüência de oscilação
medindo o intervalo entre dois picos
EFEI - IEE/DON Kazuo Nakashima
1ms
Figura 3- Comportamento Instável do Derivador.
Como podemos notar, a resposta do
derivador à uma onda triangular é uma
onda quadrada. Observe, no entanto,
que a onda retangular é ligeiramente
arredondada. Isto se deve ao resistor
Rs, instalado em série ao capacitor de
entrada Ci, para evitar instabilidade no
circuito.
f osc =
0.5V
Rs > R f
fd
fu
Para freqüências abaixo de fc o circuito funciona como derivador; onde o
ganho aumenta com o aumento da
freqüência. Para freqüências maiores
Experiências com Amplificadores Operacionais - Derivador e Integrador
que fc, o circuito funciona como amplificador inversor de ganho Av=Rf/Rs=-10 (ou +20dB; φ=180 o )
• Aumente a freqüência para aproximadamente 1,25kHz. e reajuste o osciloscópio
1/ T
2.500 kHz
Trig
-0.35 V
3
Etapa 8- Mudar o sinal de excitação
para senoidal 1Vpp, 125Hz (duas décadas abaixo em relação à última etapa) e ajustar o osciloscópio. O sinal
de saída será também uma senoidal,
porém defasado 90 o. Observe que a
tensão de saída diminui com a diminuição da freqüência.
CH1
Ajustar a freqüência até a amplitude
do sinal de saída ficar igual ao da entrada. (os dois canais devem estar
com o mesmo V/DIV). fd=1/2 π.Rf.Ci.
fd ≅ 1 / 2π 100kΩ 10nF = 159,2Hz
[Hz]
p/ Vop = Vip f d =
0.5V
5V
0.1ms
Figura 4- Derivador Operando Próximo à
Freqüência de Corte
Etapa7- Aumentar a freqüência
para aproximadamente 12,5kHz e
ajustar BASE DE TEMPO=20µS/DIV.
CH2=0,5V/DIV.
BASE DE TEMPO= 1ms/DIV.
1/ T
154.5 Hz
Trig
0.25 V
CH1
O sinal de saída é uma triangular
invertida em relação ao sinal de entrada. O circuito funciona como amplificador inversor para freqüências
maiores que a freqüência de corte.
0.5V
1/ T
12.54 kHz
Trig
-0.30 V
CH1
0.5V
1ms
Figura 6- Derivador na freqüência fd.
Etapa 9- Resposta à degrau é um
impulso.
• Mudar o sinal para QUADRADA=1Vpp. Ajustar BASE DE TEMPO =
1mS/DIV e CH2=5V/DIV. Você deverá
estar observando impulsos de quase
10V de pico.
0.5V
5V
20us
Figura 5- Derivador Operando Acima da
Freqüência de Corte
EFEI - IEE/DON Kazuo Nakashima
4
Experiências com Amplificadores Operacionais - Derivador e Integrador
Trig
0.00 V
CH1
Etapa 1- Montar o circuito da Fig. 8.
Etapa 2- Ajustes iniciais:
• Osciloscópio:
CH1=0,5V/DIV-DC; POS. SUPERIOR.
CH2=0,5V/DIV-DC; POS. INFERIOR
BASE DE TEMPO=0,1mS/DIV.
TRIGGER=CH1; SLOPE+, NORMAL,
0.5V
5V
• Gerador de funções
QUADRADA; δ=0,5; 1Vpp; nível
DC=ZERO, 2,5kHz.
1ms
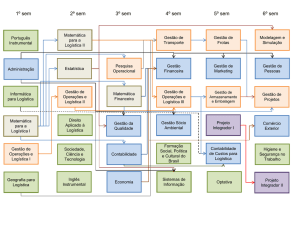
Figura 7- Resposta à Degrau.
Experiência.2- Integrador
R p = 100k
Vi
R i = 10k
-
C f = 10nF
Vo
~
+
Figura 8- Integrador
Qualquer componente contínua presente no sinal de entrada ou tensão
off set de entrada e corrente de polarização de entrada do amp op levaria
o amp op à saturação. Para evitar
este deslocamento, foi instalado o resistor Rp em paralelo ao capacitor Cf.
Formulário
Vo ( t ) =
−1
∫ Vi ( t ).dt
Ri .C f
Ti = Ri .C f
1
[rad / s]
Ti
1
fi =
[Hz]
2πTi
1
fc =
2πR p C f
Etapa 3- Ligar a alimentação e o
gerador de funções.
Você deverá estar observando uma
onda triangular de aproximadamente 2
V de pico no terminal de saída do amp
op (através de CH2).
O integrador é muito sensível ao nível dc, portanto, faça um ajuste fino
no DC LEVEL ou DC OFF SET do gerador de funções. Nesta experiência é
importante que o ciclo de trabalho da
onda quadrada seja exatamente 50%
(duty cicle δ=0,5). O período do semiciclo positivo deve ser igual ao período do semiciclo negativo.
Para Vi=0,5Vp, ∆t=0,2mS (f=2,5kHz)
e Ti=Ri.Cf=10kΩ.10nF=0,1mS, a tensão
de saída deverá ser uma onda triangular de 1Vpp
∆Vo Vi
=
∆t
Ti
∆Vopp =
ωi =
EFEI - IEE/DON Kazuo Nakashima
Ti = Vi .
[V]
∆t
∆Vo
Ti =
[ms]
Experiências com Amplificadores Operacionais - Derivador e Integrador
1/ T
2.525 kHz
0.5V
Trig
0.5V
-0.45 V
O resistor Rp, instalado em paralelo
ao capacitor Cf, foi utilizado nesta experiência para evitar o deslocamento
da tensão de saída para a saturação.
Este resistor não é nos reguladores
PID uma vez que existe um elo de realimentação negativa externo.
CH2
0.1ms
Figura 9- Resposta à Degrau do Integrador.
Etapa 4- Determinação da freqüência de integração f i .
• Mudar o sinal de entrada para
SENO, 1Vpp e diminuir a freqüência
até a amplitude do sinal de saída ficar
igual ao de entrada. Observe que a
amplitude aumenta com a diminuição
da freqüência, comportamento oposto
ao do derivador. Esta freqüência deve
ser próximo de f i =1/2 πRi.Cf
fi=1/2 π.10k Ω .10nF=1,592kHz .
1/ T
1.547 kHz
Trig
• Mudar a forma de onda para quadrada
novamente
e
ajustar
CH2=5V/DIV-DC. Observe que o sinal
de saída não é perfeitamente triangular devido ao efeito de Rp.
Para freqüências maiores que a freqüência de corte o circuito funciona
como integrador. Para freqüência menores, como amplificador inversor de
ganho Av = -Rp / Ri = -10. (+20dB; φ
=180 o ). fc=1/2 πRp.Cf.
fc= 1/2 π.100k Ω .10nF=159.2Hz
• Diminuir a freqüência para aproximadamente 50Hz
BASE DE TEMPO = 2mS/DIV.
CH2 = 5V/DIV;DC.
Trig
[kHz]
fi =
0.25 V
5
-4.0 V
CH2
CH1
0.5V
5V
2ms
Figura 10- Integrador operando abaixo de
fc.
0.5V
0.5V
0.2ms
Figura 10- Integrador na Freqüência f d .
Etapa 5- Influência de Rp.
EFEI - IEE/DON Kazuo Nakashima
Etapa 6- Retirar Rp do circuito. Observe que o sinal de saída é uma onda
triangular mais perfeita, porém, deslocada e ceifada pela saturação do amp
op.
6
Experiências com Amplificadores Operacionais - Derivador e Integrador
Tente ajustar o nível DC do sinal de
entrada com a intenção de manter o
sinal de saída na posição central. É
muito difícil. Qualquer componente
DC, inclusive Vio e Ib- do amp op,
leva o amp op à saturação.
a)Não Inversor
Vo ( t ) = 1 +
1
∫ Vi ( t ).dt
Ri . C f
Vo
1
(S ) = 1 +
Vi
Ti .S
Etapa 7- Off Set
K P =1
Ti = R i .Cf
a) Retirar o gerador de sinais do
circuito. b) Aterrar a entrada do integrador. (Atenção para não curto circuitar a saída do gerador de funções).
Curto-circuitar o capacitor Cf através de um jump. O sinal de saída
deve cair para zero (precisamente
Vio).
Retire o jump. O sinal de saída se
deslocará para a saturação (positiva
ou negativa). Este erro, que aumenta
com o tempo, é provocado por Vio e
Ib-
R p = 100k
R i = 10k
-
C f = 10nF
Vo
+
Vi
~
1/ T
2.463 kHz
Trig
0.30 V
CH1
p / Ri = Rb
VO(OffSet) = Vio +
e p / Rb = 0
VO( OffSet ) = Vio +
1
Ti
∫ [Vio
+ Ri . I io ]dt
1
∫ [Vio + Ri . Ib − ]dt
Ti
0.5V
0.5V
0.1ms
! Não desmonte este circuito. Reinstale o
resistor Rp=1MΩ
Ω e modifique o circuito
conforme o diagrama esquemático da Figura 11.
Experiência 3- Regulador PI
O circuito do regulador PI (Proporcional-Integral) não inversor é exatamente o circuito do Integrador com o
sinal de excitação aplicado na entrada
não inversora enquanto que o PI inversor necessita de um resistor adicional em série com o capacitor.
EFEI - IEE/DON Kazuo Nakashima
Figura 11- Regulador PI Não Inversor
b) Inversor
Vo
1
1
(S) = − K p +
= − K p 1 +
Vi
Ti .S
Tn .S
Kp = Rf / Ri
Ti = R i .Cf
Tn = K P .Ti = R f .Cf
Tc = R p .Cf
Experiências com Amplificadores Operacionais - Derivador e Integrador
R f =100k
R p = 100k
R i = 10k
Vi
Rf
Cf
10k
10nF
-
Kp= 1
T i = 0.1ms
T n = 0.1ms
Rs
Ci
10k
10nF
Vo
Vi
Vo
~
+
~
+
Kp=1
Não Inversor
R f =100k
Ri
1/ T
2.217 kHz
Trig
0.35 V
7
Vi
CH1
~
Rs
Ci
10k
10nF
Vo
+
Inversor
PD Inversor
0.5V
0.5V
0.1ms
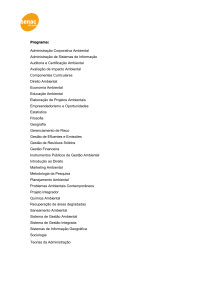
Regulador PI- Proporcional + Integrador
dB
amp op - open loop
100
sem Rp
80
60
com Rp
40
20
Rp/Ri
Regulador PD- Proporcional + Derivador
0
dB
Kp
-20
Kp=0.1
fc
fi
fn
amp op - open loop
100
80
fu
sem Rp
60
Figura 12- Regulador PI - inversor
40
Experiência 4- Regulador PD
Inversor
20
Rp/Ri
com Rp
0
Kp
-20
[
]
Vo
(S) = − K p + Td .S = − K p [1 + Tv .S]
Vi
fv
fd
fc
Kp = Rf / Ri
Figura 13- Regulador PD
Td = R f .C i
Kp=
Ti=
Tn=
Td=
Tv=
Tv = R i .C i
Tc = R s .C i
EFEI - IEE/DON Kazuo Nakashima
Ganho
Tempo
Tempo
Tempo
Tempo
fosc
fu
proporcional
de Itegração
da ação integradora
de derivação
da ação derivadora
8
Experiências com Amplificadores Operacionais - Derivador e Integrador
1
Vo
( S ) = − K p + Td . S +
Vi
Ti . S
Experiência 5- Regulador PID
Rp
Ri
Vi
Rs
Rf
Ci
1
= − K p 1 + Tv . S +
Tn . S
Cf
--
Devemos tomar muito cuidado ao
relacionarmos tempo de derivação (ou
de integração) com a freqüência de
derivação (ou de integração).
Vo
~
+
ω x = 1 / Tx [ rad / s ]
f x = 1 / 2 π . Tx [ Hz ]
Reguladores PI, PD e PID que permitem ajustes independentes de Kp,
Ti e Td (ou de Kp, Tn e Tv) necessitam de pelo menos três amp op’s.
No regulador PI da figura 15, o potenciômetro P1 ajusta o ganho proporcional Kp enquanto o potenciômetro
P2 ajusta o tempo da ação integral Tn.
Figura 14- Regulador PID
Rfp
Vi
Cfi
P1
Rip
-
P2
Rii
-
A1
- K p .Vi
+
A2
+
Vi
Rf=R
Kp
Tn
Vi
Ri=R
R1=R
A3
+
Vi
Tn
K p.V i
-
− Kp(1+ 1 ) Vi
Tn
R2=R
Ti
Tn
EFEI - IEE/DON Kazuo Nakashima
Figura 15- Regulador PI