1
INTRODUÇÃO AOS SISTEMAS ELÉTRICOS
DE POTÊNCIA
O objetivo deste capítulo é apresentar informações gerais relativas à estrutura e à forma
de funcionamento de um sistema elétrico de potência.
As diversas palavras-chave apresentadas ao longo do capítulo são introduzidas com
a finalidade de caracterizar a estrutura e a concepção de um SEP. Uma abordagem mais
profunda sobre cada assunto específico pode ser estudado com mais detalhes em referências que fogem do escopo desta obra.
1.1 INTRODUÇÃO
Os sistemas elétricos de potência são constituídos por diferentes tipos de componentes, os
quais, conectados e funcionando adequadamente, permitem a operação visando o atendimento dos seus consumidores. Trata-se de estrutura bastante complexa que além de ser
operada em tempo real, precisa ser planejada a fim de atender à expansão natural do mercado de energia elétrica.
Os sistemas elétricos de potência apresentam as características básicas:
• são compostos de equipamentos que funcionam em corrente alternada (CA) e que
operam essencialmente em tensão e freqüência constantes;
• para o adequado funcionamento, dependem do comando, controle e proteção realizados por meio de dispositivos com essa finalidade;
• usam essencialmente máquinas síncronas para geração de eletricidade, as quais,
por meio de suas turbinas permitem a conversão de energia, originária de fontes
primárias (fóssil, nuclear, hidráulica, biomassa, eólica), em energia mecânica.
• possibilitam a transmissão de blocos de energia a consumidores espalhados nas
mais diversas áreas, considerando longas distâncias. Este procedimento só é pos3
4
1. INTRODUÇÃO AOS SISTEMAS ELÉTRICOS DE POTÊNCIA
sível graças a um sistema de transmissão, compreendendo subsistemas operando
em diferentes níveis de tensão.
A energia elétrica é gerada em usinas e transmitida aos consumidores por meio da
rede de transmissão associada. Ao sistema de transmissão estão associados sistemas de
subtransmissão.
É uma prática comum se dividir a rede elétrica relativa ao transporte de energia nos
seguites subsistemas:
• sistema de transmissão;
• sistema de subtransmissão;
• sistema de distribuição.
O sistema dito de transmissão interconecta todos os grandes centros de geração e
aos principais centros de carga. Forma a parte por onde circula grandes blocos de potência
e opera com os níveis de tensão mais elevados. Tipicamente, com tensões maiores ou
iguais a 230 kV.
As tensões de geração encontram-se na faixa entre 11 a 20 kV. Esse nível de tensão
é transformado por meio de transformadores elevadores a níveis que possibilitam a transmissão de um grande bloco de potência. Ao chegar nas chamadas subestações do sistema,
a energia deve ser retransmitida. Porém, podendo agora ser em outro nível de tensão. Portanto, tanto ao nível do sistema de geração, quanto das subestações rebaixadoras, devem
existir transformadores, adequadamente projetados, a fim de permitir o fluxo de energia
desde a geração até os centros de consumo.
O sistema de subtransmissão permite a transmissão de potência em blocos mais
reduzidos, a partir das subestações de transmissão, para as subestações de distribuição.
Grandes cargas industriais podem ser supridas diretamente por um sistema de subtransmissão. Em alguns sistemas, não há uma dinstinção clara entre sistemas de transmissão e
de subtransmissão, sendo ambos um só.
O sistema de distribuição representa o estágio final envolvendo a transferência de
energia para os consumidores individuais. A tensão primária de distribuição (a denominada alta tensão do sistema de distribuição) é compreendida na faixa entre 1 e 34,5
kV. Pequenos consumidores industriais são atendidos por alimentadores primários que se
encontram nessa faixa de tensão. Os alimentadores de distribuição secundários suprem
consumidores residenciais e comerciais em faixas que podem variar de 110 a 240 V, em
valores padronizados pelo órgão regulador do setor elétrico.
1.2. O CONTROLE DE SISTEMAS ELÉTRICOS DE POTÊNCIA
5
Pequenas centrais geradoras podem ser conectadas diretamente ao sistema de subtransmissão ou ao sistema de distribuição. A tendência é que se tenha mais e mais a inserção de pequenas fontes de energia ao sistema de distribuição (a gás, a óleo, biomassa,
solar, entre outras) - a denominada geração distribuída. Para o caso brasileiro, embora
essa diversificação seja benéfica, não eliminará a forte dependência de geração hidráulica
existente.
Portanto, o sistema elétrico, como um todo, consiste de múltiplas fontes de geração
que são utilizadas para atender aos centros de carga, processo esse que é feito por complexos sistemas de transmissão. Do exposto, para manter esse complexo sistema operando
adequadamente, com padrões de qualidade e de segurança mínimos, é necessário monitorálo e controlá-lo permanentemente.
1.2 O CONTROLE DE SISTEMAS ELÉTRICOS DE POTÊNCIA
A energia geralmente não é consumida diretamente na forma elétrica. Ela é antes convertida em outro tipo, tal como calor, luz, energia mecânica, entre outros. A vantagem
da forma elétrica é que pode ser transmitida e controlada com elevado grau de eficiência e confiabilidade. Conseqüentemente, um sistema elétrico adequadamente operado e
controlado deve atender a alguns requisitos fundamentais:
1. O sistema deve ser capaz de suprir continuamente as variações de carga, tanto sob
o ponto de vista de potência ativa quanto de reativa. Diferenetemente de outras formas de energia, a elétrica não pode ser armazenada em grandes quantidades. Então,
uma reserva "girante" deve ser prevista e controlada permanentemente.
2. O sistema deve suprir energia com um baixo custo e com um mínimo impacto
ecológico.
3. A qualidade da energia suprida deve atender alguns critérios mínimos com relação
aos seguintes fatores:
• freqüência constante;
• tensão constante ou parâmetro próximo; e
• confiabilidade.
6
1. INTRODUÇÃO AOS SISTEMAS ELÉTRICOS DE POTÊNCIA
Vários níveis de controle são verificados a fim de atender aos requisitos enumerados
anteriormente. Por exemplo, deve se ter controladores atuando em elementos individuais.
Em uma estação geradora, ações dessa natureza consistem de controle primário sobre o
sistema de regulação de velocidade (turbina do gerador) e sobre o sistema de excitação
(regulação de tensão). O controle sobre a turbina é responsável pela regulação de velocidade e pela energia suprida. Isto é feito atuando-se em mecanismos associados a
dispositivos que controlam pressões, temperaturas, fluxos de combustível, de água. A
função do sistema de excitação é a de regulação da tensão terminal do gerador e da potência reativa de saída. Os MWs (potência ativa) de saída de cada gerador são determinados
pelo controle do sistema de geração.
O controle primário do sistema de geração busca o balanço total da potência gerada a fim de atender às cargas e perdas do sistema. Esta ação deve ser efetuada visando
manter-se a freqüência do sistema aproximadamente constante, bem como os intercâmbios programados nas interligações.
Os controles do sistema de transmissão incluem dispositivos para o controle de
potência e de tensão, tais como compensadores estáticos de reativo (CERs), compensadores síncronos, capacitores e reatores chaveados, transformadores com comutadores
de tap automático, controles de elos de corrente contínua, entre outros. Esses equipamentos devem ser modelados convenientemente de modo a atender aos requisitos relacionados
a estudos específicos.
Os objetivos das ações de cotrole dependem do ponto de operação do sistema
elétrico de potência. Sob condições normais, o objetivo do controle é manter os sistema
operando o mais eficientemente possível, com valores de tensão e freqüência próximos
aos nominais. Por outro lado, quando condições anormais são verificadas, novos objetivos devem ser buscados visando restabelecer o sistema às suas condições normais de
operação, o mais rápido possível.
A maioria das grandes falhas em um sistema raramente é resultado de um simples distúrbio catastrófico, causando colapso em um sistema aparentemente seguro. Tais
falhas, em geral, resultam de uma combinação de circunstâncias que estressam a rede
elétrica muito além de sua capacidade. Distúrbios naturais severos (tempestades), funcionamento inadequado de equipamentos, falha humana, projeto inadequado, contribuem
para enfraquecer o sistema elétrico e eventualmente levá-lo a uma situação de colapso.
1.2.1 Principais Equipamentos de um Sistema Elétrico de Potência
Os dispositivos de controle atuam sobre equipamentos, muito deles, responsáveis pela
geração ou pela transmissão de grandes blocos de energia. Podem ser mencionados alguns
como
1.2. O CONTROLE DE SISTEMAS ELÉTRICOS DE POTÊNCIA
7
• geradores;
• linhas de transmissão;
• transformadores de potência;
• capacitores em derivação (shunt) e em série;
• reatores em derivação;
• sistemas de transmissão CA flexíveis - flexible AC transmission systems (FACTS);
• compensadores síncronos.
Não seria possível operar o sistema sem os equipamentos de proteção, de redução
de medidas para instrumentos, de manobra e de proteção, tais como:
• tranformadores de potencial (TPs), divisores capacitivos de potencial (DCPs);
• transformadores de corrente;
• chaves, seccionadoras, disjuntores;
• relés de proteção, filtros;
• pára-raios.
1.2.2 A estrutura Organizacional de um SEP
No modelo antigo, as empresas de energia elétrica apresentavam uma estrutura verticalizada, englobando, na maioria dos casos, os segmentos de geração, transmissão, distribuição e comercialização juntas. Nesse caso, as empresas recebiam uma concessão para
o fornecimento de energia a uma determinada região do país e atendiam essa demanda
8
1. INTRODUÇÃO AOS SISTEMAS ELÉTRICOS DE POTÊNCIA
utilizando a energia gerada no seu próprio sistema, ou adquirida de empresas vizinhas
através de contratos. Em alguns sistemas, tais contratos de fornecimento de energia entre
empresas não diretamente conectadas eletricamente podiam existir, exigindo a transferência de energia através do sistema de transmissão de uma terceira empresa (wheeling).
O modelo era fortemente regulamentado, não existindo a possibilidade de uma empresa
comercializar energia diretamente aos consumidores fora de sua área de concessão. Assim, sob o ponto de vista econômico, o sistema operava como um monopólio regulado.
Em geral, existia algum mecanismo coordenador da operação do sistema interligado, o
qual orientava as diversas empresas em relação ao melhor aproveitamento dos recursos
energéticos e à manutenção de um adequado nível de confiabilidade do sistema elétrico.
As principais características desse modelo são:
• Geração, transmissão, distribuição e comercialização integradas (bundled) em uma
mesma empresa;
• A cada empresa associa-se uma área de concessão onde todos os consumidores são
cativos (monopólio);
• A troca de energia entre empresas é realizada somente através de contratos bilaterais
de médio ou longo prazo;
• O custo final da energia inclui todos os custos diretos e indiretos da empresa verticalizada.
Em função da necessidade de otimização de recursos, de operar o sistema com
níveis mais elevados de carregamento, da introdução de diversos novos participantes, foi
necessário se repensar e a estrutura tradicional de um SEP. Um novo modelo passou a
existir, concebido a partir de desregulamentação específica para o setor elétrico. Nessa
nova estrutura, ocorre a separação do transporte (transmissão e distribuição) da produção
(geração) e da comercialização. Além disso, é introduzida a competição nos segmentos
de geração e comercialização, bem como verifica-se a preservação da transmissão e distribuição como monopólios naturais. Porém, com livre acesso a esses segmentos por parte
de geradores e comercializadores. A separação dos segmentos de geração e transmissão
suscitou dúvidas no início dos estudos de reestruturação do setor elétrico. Como seria
possível operar de forma confiável um sistema elétrico no qual os geradores seriam programados de acordo com transações comerciais (compra e venda de blocos de energia)
entre empresas geradoras e comercializadoras e utilizariam os sistemas de transmissão
operados por outras empresas? A resposta a essa questão vem da observação de que,
embora geração e transmissão sejam processos fisicamente inseparáveis, é possível estabelecer uma separação comercial ou financeira entre essas atividades. Desta forma, as
1.2. O CONTROLE DE SISTEMAS ELÉTRICOS DE POTÊNCIA
9
transações comerciais celebradas entre agentes comerciais do sistema nem sempre se realizam fisicamente. A decisão sobre o efetivo despacho de geração, em geral, é atribuída
a uma entidade independente, cujo objetivo é operar o sistema de forma confiável, independentemente dos interesses comerciais existentes. Um acerto de contas pós-operação é
realizado para compensar eventuais desvios em relação aos contratos de compra e venda
de energia.
Além da separação entre produção e transporte, a nova estrutura apresenta, também, a possibilidade de separar os serviços necessários para o bom funcionamento do sistema elétrico, porém não diretamente associados à produção de energia, daqueles diretamente associados à produção de energia elétrica. Tais serviços são denominados Serviços
Ancilares. Como exemplo disso, podemos mencionar o controle de tensão e fluxo de
reativos, reserva operativa, controle automático da geração etc. Nessa nova estrutura de
setor elétrico, as empresas de transmissão e de distribuição são obrigadas a permitir o
livre acesso aos seus sistemas, mediante a cobrança de um serviço de uso de suas redes
(pedágio), possibilitando a realização de negócios entre quaisquer empresas de geração,
consumidores livres e comercializadoras de energia, desde que as restrições de operação
assim o permitam. A operação do sistema é delegada a um Operador Independente do
Sistema (OIS), o qual se constitui em uma empresa sem interesse financeiro no negócio
de energia. No caso brasileiro esse órgão é o Operador Nacional do Sistema Elétrico
(ONS). O escopo de atuação do OIS, suas atribuições e responsabilidades, variam de um
país para outro ou mesmo dentro de um mesmo país. O OIS poderá ou não ser o proprietário dos sistemas de transmissão. O OIS poderá ou não operar o órgão responsável
pelo mercado de energia elétrica. Em alguns casos, a operação desse mercado é delegada a uma outra entidade denominada Bolsa de Energia (BE). Em muitos casos, o OIS
é o responsável direto pelo provimento dos serviços ancilares; em outros casos, o OIS
coordena um mercado de serviços ancilares aberto a outras empresas. Novos atores que
surgem nesse novo cenário são os Comercializadores de Energia (CE), os quais são empresas que servem como intermediários de negócios entre geradoras e consumidores, e
os Provedores de Serviços Ancilares (PSA). Finalmente, para controlar e fiscalizar o funcionamento do mercado de energia e o funcionamento do sistema elétrico, é necessária a
existência de uma Agência Reguladora (AR), órgão governamental responsável pela verificação do cumprimento do marco regulatório do setor elétrico, pelo controle e supervisão
do funcionamento do mercado de energia e a defesa dos direitos dos consumidores. No
Brasil, essa função é exercida pela Agência Nacional de Energia Elétrica (ANEEL).
A compreensão de como a energia elétrica flui no sistema, desde os centros de
geração, passando pelos sistemas de transmissão, até o consumidor, é um assunto que
depende de estudos envolvendo tanto aspectos estáticos, quanto dinâmicos. Neste sentido,
a avaliação do fluxo de carga no sistema, de preferência de forma ótima, deve ser avaliada,
considerando a segurança dinâmica e parâmetros que possam demonstrar a qualidade do
fornecimento da energia elétrica.
2
MODELAGEM DE EQUIPAMENTOS
2.1 INTRODUÇÃO
Os estudos de aspectos estáticos e dinâmicos de sistemas elétricos de potência dependem
da natureza e grau de detalhamento que se deseja avaliar. Deste modo, modelos apropriados de equipamentos devem ser utilizados a fim de se obter a precisão esperada.
Modelos estáticos e dinâmicos são diferentes. Entretanto, alguns modelos estáticos são comuns a estudos estáticos e dinâmicos. Além disso, qualquer estudo dinâmico
requer a determinação de um ponto de operação. Em função disto os aspectos estáticos
são inicialmente estudados. Com esta finalidade, é necessário se definir os modelos dos
principais equipamentos.
O interesse aqui está voltado para estudos de fluxo de carga nos sistemas elétricos
de potência. É suficiente considerar a rede elétrica como de natureza trifásica e equilibrada. Com esta característica, a representação de cada equipamento por um circuito
monofásico equivalente é apropriada por várias razões: simplificação de cálculos, representação satisfatória para estudos de regime permanente, utilização de representação
fasorial etc.
Os principais equipamentos para estudos estáticos ao nível de regime permanente
estável são: as linhas de transmissão, os transformadores, os dispositivos FACTS, as cargas e os geradores. Os geradores impactam mais estudos dinâmicos, sendo a sua modelagem tratada no tópico relativo a estabilidade de sistemas de potência.
2.2 LINHA DE TRANSMISSÃO
Neste livro, a finalidade é voltada para estudos estáticos e dinâmicos em baixas freqüências. Com tais características, a linha de transmissão é representada por um circuito estático e passivo, invariante com a freqüência, cujo modelo depende do comprimento da
linha.
A linha de transmissão é modelada conhecendo-se os seus parâmetros elétricos por
11
12
2. MODELAGEM DE EQUIPAMENTOS
fase e o seu comprimento. É usual dividi-la em curta (até cerca de 80 km), média (entre 80
e 200 km) e longa (acima de 200 km). A representação é feito por um circuito monofásico
equivalente, por fase. Supõe-se que a linha opere em regime permanente, a uma freqüência, que no Brasil é igual a 60 Hz. A linha tem quatro parâmetros característicos: uma
condutância, G; uma resistência, R; uma reatância, X = ω L, sendo L a indutância da linha;
e uma susceptância, Y = ωC, onde C é a capacitância da linha. O primeiro dos parâmetros é desprezível para a faixa usual de freqüência dos estudos em regime permanente e de
análise de estabilidade em baixas freqüências. Assim, considerar-se-á G = 0 para fins de
modelagem.
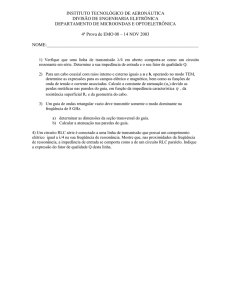
As linhas curtas são representadas por um circuito no qual a resistência equivalente
dos condutores, R, é conectada em série com a reatância indutiva, X. A Figura 2.1 mostra
um circuito equivalente para essa situação.
Figura 2.1 Modelo de linha curta
Na Figura 2.1, Ii é a corrente na entrada da linha, Io é a corrente na saída, Vi é a
tensão na entrada e Vo é a tensão na saída. Nesse caso, Ii = Io . As linhas médias são
representadas por um circuito π -equivalente, contendo além da resistência série, R, e da
reatância indutiva série, X, mais a susceptância capacitiva, Y, a qual é ligada de uma fase
para a referência. A susceptância é dividida em duas partes, sendo a metade alocada em
cada terminal da linha. A Figura 2.2 exibe o circuito equivalente.
O modelo de linha longa considera a abordagem por parâmetros distribuídos. O
seu modelo é semelhante ao de uma linha média. No entanto, ao invés de se ter uma
impedância série, formada pela composição série da resistência R com a reatância X, temse simplesmente uma impedância definida como Ze e uma susceptância Ye , cujos cálculos
são efetuados conforme as expressões a seguir.
Ze = Zc senh(γ l)
(2.1)
2.2. LINHA DE TRANSMISSÃO
13
Figura 2.2 Modelo de linha média
onde l é o comprimento da linha e as constantes Zc e γ são definidas como:
r
L
R
(1 − j
)
C
2ω l
p
√
R
)
γ = (R + jω L) jωC = jω LC(1 − j
2ω L
Zc =
(2.2)
(2.3)
∆ √
Nas expressões (2.2) e (2.3), j = −1, ω = 2π f e f é a freqüência industrial.
Dessas equações, caso as perdas não são consideradas, Zc é uma resistência e γ é um
número puramente imaginário.
Nessas condições, a impedância Zc é denominada impedânq
cia de surto e Zc =
L
C.
A potência transmitida pela linha quando essa é terminada por sua impedância de
surto é conhecida como carga natural ou carga da impedância de surto - surge impedance
load (SIL), dada por:
VN2
SIL =
,
Zc
em W,
(2.4)
onde VN é a tensão nominal da linha.
Caso VN seja a tensão fase-neutro, a equação (2.4) fornecerá a potência de uma
única fase. Se VN é uma tensão fase-fase (tensão de linha), a potência será trifásica.
O elemento em derivação (shunt) do modelo de uma linha longa é representado pelo
termo:
2. MODELAGEM DE EQUIPAMENTOS
14
Ye
1 cosh(γ l) − 1
=
2
Zc senh(γ l)
(2.5)
A Figura 2.3 mostra o circuito equivalente para a linha longa.
Figura 2.3 Modelo de linha média
EXEMPLO 2.1
Uma linha que opera com freqüência industrial igual a 60 Hz e com tensão nominal
de linha igual a 500 kV apresenta os seguintes parâmetros: L = 8, 84 × 10−4 H/km, C =
13, 12 nF/km e R = 0, 0222 Ω/km. Calcule a impedância de surto, bem como o SIL dessa
linha.
SOLUÇÃO
A impedância de surto e o SIL não dependem do comprimento da linha. Assim,
Zc =
s
8, 84 × 10−4
= 259, 6 Ω
13, 12 × 10−9
Considerando que a tensão nominal da linha é igual a 500 kV (tensão fase-fase),
então a potência de SIL será
SIL =
5002 × 106
= 963, 1 MW
259, 6
EXEMPLO 2.2 Considere que a linha no Exemplo 2.2 tenha 350 km de comprimento. Suponha que uma tensão fase-neutro igual a 288,67 kV seja aplicada ao terminal
2.2. LINHA DE TRANSMISSÃO
15
de entrada da linha. Calcule a tensão fase-neutro e de linha no terminal de saída da linha,
considerando:
a) um modelo de linha média;
b) um modelo de linha longa.
SOLUÇÃO
a) O módulo da tensão na entrada da linha é igual a 288,67 kV . Considere a fase da
tensão na entrada da linha como a referência angular. Assim, faz-se Vi = 288, 67∠0o kV .
Inicialmente, é necessário calcular os parâmetros do circuito equivalente, conforme Figura
2.3.
A reatância total da linha é X = 2π L × l = 0, 333 × 350 = 116, 35 Ω. Por sua vez, a
susceptância total da linha é Y = 2π C × l = 4, 95 × 10−6 × 350 = 0, 0017 S. A resistência
total da linha é R = 0, 0222 × 350 = 7, 77 Ω.
Por conveniência, deve-se converter a susceptância capacitiva Y em reatância capacitiva para que seja calculada a corrente que circula por esse elemento do circuito equivalente. Lembrar que XCap = 1/Y . Porém, na forma de impedância ZCap = jY1 = −Y j . A
corrente Io , em kA, no circuito equivalente da Figura 2.3 é:
Io =
288, 67∠0o
= 0, 2781∠89, 6o.
7, 77 + j115, 35 − j(2/0, 0017)
A tensão nos terminais de saída da linha é:
V o = − j(2/0, 0017) × 0, 2781∠89, 6o = 321, 1∠ − 0, 4o kV.
Portanto, a intensidade da tensão fase-fase no terminal de saída da linha é
√
Vo = 321, 1 × 3 = 556, 1 kV.
Esse resultado está coerente, porque a linha é longa e está descarregada. Portanto,
há uma elevada parcela de potência reativa gerada pela linha, fazendo com que a tensão
fique acima da nominal no terminal de saída, quando o terminal de entrada é alimentado
com tensão nominal.
b) Considerar-se-á agora a situação em que a linha é modelada por circuito equivalente para linha longa. O procedimento de cálculo a ser realizado é semelhante ao apresentado no item a). É necessário calcular os parâmetros Z e e Y e . Os parâmetros são os
seguintes para ω = 2π 60 = 377 rad/s:
2. MODELAGEM DE EQUIPAMENTOS
16
γ=
q
(0, 0222 + j377 × 8, 84 × 10−4) j377 × 13, 12 × 10−9 = j0, 0013
Zc =
s
(0, 0222 + j377 × 8, 84 × 10−4)
= 259, 7 − j1135, 8 Ω.
j377 × 13, 12 × 10−9
Então
Z e = Zc senh(γ l) = (259, 7 − j1135, 8) × senh( j0, 0013 × 350) = 7, 25 + j112, 77 Ω.
Cálculo semelhante pode ser feito para Y e /2, resultando em
Y e /2 = 1, 01 × 10−6 + j8, 80 × 10−4 S.
Assim, a corrente e a tensão no terminal de saída são:
Io =
Vi
= 0, 282∠89, 5o kA
Z e + 2/Y e
V o = (2/Y e ) × I o = (1, 3 − j1135, 8) × 0, 282∠89, 5o = 320, 5∠ − 0, 4o kV
A magnitude da tensão fase-fase nesse caso é
√
Vo = 320, 5 × 3 = 555, 1 kV.
Observa-se, deste modo, que embora a linha seja longa, a utilização de um modelo
a parâmetros concentrado para realização dos cálculos gera desvios pouco significativos
em relação aos resultados em que se considerou modelo a parâmetros distribuídos. Evidentemente, para comprimentos superiores, os resultados poderão ser bastante diferentes.
2.3. DISTRIBUIÇÃO DOS FLUXOS DE POTÊNCIA EM UMA LINHA
17
2.3 DISTRIBUIÇÃO DOS FLUXOS DE POTÊNCIA EM UMA
LINHA
Para ilustrar como ocorre a distribuição do fluxo de carga em uma linha de transmissão,
considere o modelo de linha a parãmetros concentrados mostrado na Figura 2.4. Neste
modelo, a impedância série da linha é Z km = Rkm + jXkm , onde Rkm é a resistência e Xkm
é a reatância série; Y sh é a admitância resultante em cada terminal da linha, enquanto Y
é a susceptância total. I km é por convenção a corrente que sai da barra k para a barra m,
ao passo que I mk é a corrente que sai da barra m para a barra k. Essa convenção para o
sentido da corrente, bem como para fluxo de potência será adotada ao longo de todo o
texto.
Supõe-se aqui que as tensões nas barras k e m são conhecidas para que seja possível calcular os fluxos de potência. Mais adiante, mostrar-se-á como obter essas tensões
mediante formulação e solução do problema de fluxo de carga.
Figura 2.4 Distribuição de fluxo de potência em uma linha de transmissão
EXEMPLO 2.3 Considere o diagrama unifilar mostrado na Figura 2.5 como representativa de um sistema elétrico equivalente formado pelas barras k e m, as quais são
interligadas por meio de uma linha de transmissão. Ambas as barras são caracterizadas
como de 230 kV de tensão nominal.
2. MODELAGEM DE EQUIPAMENTOS
18
Figura 2.5 Linha interligando as barras k e m
Considerando que as tensões nas duas barras sejam conhecidas, determinar os fluxos
de potência ativo e reativo na interligação e no circuito equivalente. Suponha que a linha
seja representada por seu modelo π -equivalente, para linha média, cujos parâmetros em
pu são os seguintes: R = 0, 017, X = 0, 1224, Y = 0, 22. O valor de Y corresponde à
susceptância total da linha. Ou seja, Y = ωC, onde C é a capacitância da linha. Nesse
sistema, as tensões nas duas barras são: V k = 1, 022∠23, 3o e V m = 1, 037∠11, 8o.
Solução
As correntes nas duas extremidades da linha são, portanto, I km e I mk . Elas serão
calculadas como segue.
I km =
0, 22
1, 022∠23, 3o − 1, 037∠11, 8o
+ 1, 022∠23, 3o( j
) = 1, 6897∠33, 39o pu.
0, 017 + j0, 1224
2
A Figura 2.6 mostra o procedimento executado no Matlab para o cálculo da corrente I km .
Os demais cálculos podem ser obtidos de modo semelhante.
I mk =
1, 037∠11, 8o − 1, 022∠23, 3o
0, 22
+ 1, 037∠11, 8o( j
) = 1, 6424∠ − 154, 20o pu.
0, 017 + j0, 1224
2
O fluxo de potência de k para m e de m para k é calculado como apresentado abaixo.
∗
Skm = V k I km = 1, 022∠23, 3o × 1, 6897∠ − 33, 39o = 1, 7002 − j0, 3025 pu.
2.3. DISTRIBUIÇÃO DOS FLUXOS DE POTÊNCIA EM UMA LINHA
19
Figura 2.6 Procedimento de cálculo executado no Matlab
∗
Smk = V m I mk = 1, 037∠11, 8o × 1, 6424∠154, 20o = −1, 6526 + j0, 4121 pu.
Dos resultados anteriores, é possível fazer a seguinte análise. Da barra k, na tensão
de 1,022 pu (ou, considerando uma base de 230 kV, 1, 022 × 230 ≈ 235 kV), 1,70 pu de
potência ativa é enviado para a barra m. Considerando que a base de potência é igual a
100 MVA, resulta no envio de 170 MW. Em relação à potência reativa, ocorre absorção de
aproximadamente 0,303 pu. Isto corresponde a absorção de 30,3 MVar de potência reativa
na barra k. Com relação à barra m, a sua tensão é igual a 1,037 pu (ou 1, 037×230 = 238, 5
kV). Nessa condição, a barra absorve 1,65 pu ou 165 MW. Verifica-se, portanto, que
houve perda ativa de 5 MW na interligação. Quanto à potência reativa, a barra gera 0,41
pu. Desse modo, 41 MVar é gerado e enviado para a linha.
20
2. MODELAGEM DE EQUIPAMENTOS
A potência reativa que é gerada pela linha em cada extremidade, corresponde à
potência que é liberada pelos capacitores da linha em suas extremidades. Assim, no lado
da barra k, a potência reativa gerada é Qshk = |V k |2 × Y2 = 1, 0222 × 0,22
2 = 0, 1149 pu.
Ou seja, nesse lado da linha, é gerado 11,5 MVar. Do lado da barra m, a potência reativa
gerada é Qsh = |V m |2 × Y2 = 1, 0372 × 0,22
2 = 0, 1183 pu. Portanto, é gerado 11,8 MVar.
A distribuição dos fluxos resultantes é mostrada na Figura 2.7 (a seta normal indica
o sentido do fluxo de potência ativa, enquanto a seta com um traço inclinado indica fluxo
de potência reativa).
Figura 2.7 Distribuição final de fluxos
Com relação ao balanço de potência de reativo nas extremidades da linha, são constatadas as seguintes observações:
• Se a barra m recebe 30,3 MVar e ocorre geração de 11,5 MVar devido ao capacitor
da linha nessa extremidade, então, 18,8 MVar são provenientes da linha e que há
excesso de potência reativa sendo gerado na barra m.
2.3. DISTRIBUIÇÃO DOS FLUXOS DE POTÊNCIA EM UMA LINHA
21
• Na barra m, há geração de 41,0 MVar e mais 11,8 MVar por parte do capacitor da
linha. Isto implica dizer que 52,8 MVar estão sendo liberados para a outra extremidade da linha.
• A perda reativa na linha (consumo da reatância indutiva da linha) será Q perda =
52, 8 − 18, 8 = 34 MVar.
EXERCÍCIO
Considere que a um dos terminais de uma linha de transmissão CA é conectado
um gerador síncrono, cuja magnitude da tensão gerada é igual a 10 kV. A linha de
transmissão pode ser representada por seu circuito π -equivalente, cujos parâmetros são:
r = 0, 02 Ω/km, c = 100 nF/km e l = 0, 1 mH/km. A freqüência do sistema é igual a 60
Hz. A partir dessas informações e considerando base de tensão igual a 10 kV, de potência
igual a 100 MVA, e comprimento da linha igual a 100 km, calcule, em pu:
a) para a condição do outro terminal da linha à vazio,
a.1) a corrente que é fornecida pelo gerador e a tensão nos terminais da linha;
a.2) as potências ativa e reativa que são geradas pelo gerador;
a.3) as perdas ativa e reativa na linha.
b) para a condição de carga igual a 10 MW e 3 MVar indutivo conectada ao outro
terminal,
b.1) a corrente que é fornecida pelo gerador e a tensão na carga;
b.2) as potências ativa e reativa que são geradas pelo gerador;
b.3) as perdas ativa e reativa na linha.
Respostas
a.1) I ≈ j0, 0038 pu e V o ≈ 1, 008 pu.
a.2) A potência aparente fornecida ou absorvida pelo gerador é exclusivamente
reativa S = − j0, 0038 pu.
a.3) A perda reativa na linha será QL = |I 1 |2 × X = 0, 00192 × 3, 77 = 1, 36 × 10−5
pu, que é um resultado desprezível frente à potência absorvida pelo gerador.
A resolução do item b) pode ser feita de modo semelhante. Mas, neste caso,
considera-se a carga conectada aos terminais da linha, ao invés da linha à vazio.
2. MODELAGEM DE EQUIPAMENTOS
22
Suponha que a carga possa ser representada por uma impedância constante, constituída pela composição série de um resistor Rc e de uma reatância Xc. Ou seja Z = Rc + jXc .
Considere que essa impedância seja calculada considerando-se o valor de tensão nominal
da linha. Logo, sendo a tensão nominal igual a 1 pu, a potência da carga, em pu, será
∗
3
10
+ j 100
= 0, 1 + j0, 03 pu. Isto significa que S = 1, 0 × I L = 0, 1 + j0, 03 pu. A
S = 100
corrente nominal nesse caso será I L = 0,1+1j0,03 = 0, 9991 − j0, 03 pu. Então a impedância
da carga será Z = VI o = 0, 1 + j0, 03 pu.
L
2.4. TRANSFORMADOR DE POTÊNCIA
23
2.4 TRANSFORMADOR DE POTÊNCIA
Os transformadores de potência possibilitam a utilização de diversos níveis de tensão em
um sistema elétrico. Do ponto de vista de eficiência e de transferência de potência, a tensão de transmissão deve ser elevada, porém não é usual se gerar ou consumir energia nesse
mesmo nível de tensão. Em sistemas elétricos modernos, desde a geração até os centros
de consumo, a tensão pode passar por até uns cinco estágios de transformação. Conseqüentemente, a quantidade em MVA nominal de todos os transformadores no sistema é
cerca de cinco vezes a potência nominal de todos os geradores.
Além de permitir a transformação de tensões, os transformadores são freqüentemente usados para controle de tensão e de fluxo de potência reativa. Portanto, praticamente todos os transformadores utilizados nos sistemas de transmissão e na entrada dos
alimentadores de sistemas de distribuição apresentam taps.
A variação de taps permite compensar variações de tensões no sistema. Dois tipos
de componentes para variação de taps são encontrados: o que permite a variação sem
carga (off-load) e o sob carga (under-load tap changing) (ULTC), ou on-load tap changing (OLTC), ou simplesmente load tap changing (LTC). Para alteração na relação do
primeiro tipo, é necessário que o transformador seja desenergizado. São usados quando a
relação de taps precisa ser alterada somente após longos períodos. Por exemplo, quando
houver crescimento em tempos mais espaçados da carga (período de longo termo), expansão da demanda ou variações sazonais. O LTC é utilizado quando há necessidade de
alterações freqüentes na relação de transformação. Por exemplo, para acompanhar as mudanças diárias de carga. Os taps normalmente permitem uma variação de na relação de
transformação.
Os transformadores podem ser unidades trifásicas ou três unidades monofásicas
constituindo um banco trifásico. A última opção é preferida para sistemas em extra-alta
tensão e sistemas de distribuição. Quando a relação de transformação é pequena (por
exemplo 500 kV para 230 kV), a melhor opção é utilizar autotransformadores. Comparado ao transformador de dois enrolamentos convencional, o autotransformador apresenta menor custo, maior eficiência, e melhor regulação.
Em sistemas interligados, algumas vezes torna-se necessário efetuar conexões que
formam circuitos em malhas em um ou mais subsistemas. A fim de controlar o fluxo
de potência ativa e prevenir sobrecarga em algumas linhas, são introduzidos os chamados transformadores defasadores. Em certos casos, além da transformação de fase, é
necessário realizar também transformação do módulo de tensão, via uso de taps.
24
2. MODELAGEM DE EQUIPAMENTOS
2.4.1 Modelo do Transformador
O modelo do transformador de potência depende da presença ou não de taps. O modelo
convencional é composto de um transformador ideal e de uma impedância série. A relação
de transformação de tensão no transformador ideal, em pu, é 1 : a, onde a é o tap em pu.
A impedância série é formada pela reatância do transformador, em geral, desprezando-se
as resistências dos enrolamentos. Ou seja, Z T = jXT . A Figura 2.8 ilustra a inserção
desses elementos em um diagrama unifilar, substituindo-se, por conveniência, Z T , por
uma admitância ykm , ficticiamente ligada entre as barras p e m. Por essa convenção,
supõe-se que o transfomador possua tap, em pu, somente do lado da barra m, embora
fisicamente ele possa ter tap em ambos os lados.
O tap a pode ser um número real ou complexo, dependendo do tipo de transformador. Na situação na qual se diz que as tensões V k e V m estão em fase, diz-se que a
"relação de tap está em fase". Quando a é um número complexo, o transformador, além
da transformação das magnitudes da tensão, como no caso em fase, proporciona também
a transformação da fase. Na dedução que se segue, considerar-se-á somente a situação na
qual a constante a representa uma grandeza real .
Figura 2.8 Modelo do transformador com tap
A dedução das equações do transformador com tap é baseada nas equações do transformador ideal e no cálculo das correntes que fluem no equipamento. O objetivo é se determinar um circuito elétrico equivalente semelhante ao que foi apresentado para o caso
da linha de transmissão CA. isto é possível se for possível calcular as constantes A B e
C do circuito elétrico mostrado na Figura 2.10. O circuito forma um quadripolo, no qual
2.4. TRANSFORMADOR DE POTÊNCIA
25
pode-se imaginar o terminal de entrada como do lado da barra k e o terminal de saída
como do lado da barra m.
Figura 2.9 Transformador equivalente com tap
No circuito da Figura 2.10 as relações entre as correntes de entrada e as tensões de
saída são dadas pelas expressões a seguir.
I km = (A + B)V k − BV m
I mk = −BV k + (A +C)V m
(2.6)
(2.7)
Deve-se calcular os parâmetros do circuito em função dos parâmetros do transformador.
Considere o transformador ideal entre as barras (nós) k e m. Algumas relações para
esse elemento são as seguintes:
Conservação da potência a potência de entrada é igual à potência de saída. Em pu,
isto significa que a potência no nó k é a mesma no nó p, a menos do sinal, isto é,
Skm + Smk = 0;
Relação de transformação de tensão a relação de tensão, em pu, entre o nó p e o nó k
é V p = aV k .
2. MODELAGEM DE EQUIPAMENTOS
26
Do princípio de conservação da potência no transformador ideal, pode-se tirar a
seguinte relação:
∗
∗
Skm + Smk = 0 ⇒ V k I km +V p I mk = 0
(2.8)
De (2.8) e considerando que a é uma grandeza real, tem-se que
I km = −aI mk
(2.9)
A corrente Imk pode ser calculada, considerando-se a diferença de potencial entre os
pontos m e p. Ou seja,
I mk = (V m − aV k )ykm
(2.10)
I km = −aI mk = −a(V m − aV k )ykm
(2.11)
De (2.9), observa-se que
Logo, encontra-se diretamente que A = aykm . Em seguida, calcula-se B a partir de
(2.6). Ou seja, A + B = a(aykm ). Deduz-se então que B = a(a − 1)ykm . Da equação (2.10),
sabe-se que A +C = 1. Logo, C = (1 − a)ykm .
Em relação à natureza física dos parâmetros A, B e C sã feitas as seguintes observações:
a < 1 o elemento B é uma impedância indutiva e C é capacitiva;
a > 1 o elemento B é uma impedância capacitiva e C é indutiva;
a = 1 B = C = 0, indicando que o modelo é representado simplesmente por uma impedância indutiva, ou situação de tap nominal.
EXEMPLO 2.3
Considere que o diagrama unifilar de um transformador com tap em fase seja o
mesmo indicado na Figura 2.8. Os valores nominais de tensão do lado das barras k e
m são 13,8 kV e 230 kV , respectivamente (tensões equivalentes a 1 pu em cada lado do
transformador). Na condição nominal, a reatância do transformador é igual a 0,1 pu.
2.4. TRANSFORMADOR DE POTÊNCIA
27
Determinar um modelo equivalente do transformador, em pu, para a condição de tap em
fase, no qual a = 1, 10 pu.
Solução:
A admitância nominal do transformador é ykm =
1
jXt
=
−j
Xt
= − j10 pu.
Os parâmetros do modelo equivalente são: A = aykm = 1, 1 × (− j10) = − j11 pu,
B será B = a(a − 1)ykm = 1, 1(1, 1 − 1) × (− j10) = − j1, 1 pu. Por fim, C = (1 − a)ykm =
(1 − 1, 1) × (− j10) = j1, 0 pu.
Observa-se que do lado do tap, sendo este ajustado para valor maior que o nominal,
a admitância é capacitiva, conforme previsto anteriormente. Ao contrário, no lado oposto,
a admitância é indutiva.
EXEMPLO 2.4
Considere que seja aplicada uma tensão de 13 kV no lado de baixa tensão do transformador descrito no exemplo 2.3. Calcule a tensão no lado de alta tensão, em kV , bem
como as correntes nos enrolamentos de baixa e alta tensão, em A. Sabe-se o transformador
tem tap apenas do lado de alta tensão (lado da barra m na Figura 2.8 e está operando a
vazio.
Solução
13
A magnitude da tensão aplicada ao lado de baixa tensão (barra k) é Vk = 13,8
=
0, 942 pu. De acordo com o circuito elétrico da Figura 2.10, a tensão na barra m pode
ser calculada utilizando-se a regra do divisor de potencial, bem conhecida em circuitos
elétricos. Ou seja:
Vm =
1
C
1
A
+ C1
×Vk =
1
j1
1
− j10
+
1
j1
× 0, 942 = 1, 036 pu
Então, em kV, a tensão no lado de alta tensão é igual a 238,3 kV . A corrente no
enrolamento de alta tensão é nula, pois o transformador está a vazio. No lado de baixa
tensão, de acordo com o circuito equivalente do transformador, tem-se:
Ikm = BV k +CV m = −2, 2 × 10−16 ≈ 0
Também no enrolamento de baixa tensão, a corrente é nula. Este resultado era
esperado, justificado pelo fato de que não há carga no lado de alta tensão.
2. MODELAGEM DE EQUIPAMENTOS
28
O transformador com tap é útil nas situações nas quais podem ocorrer conflito de
base de tensão, quando se deseja transformar o circuito em uma representação de uma
determinada base. Para ilustrar esse fato, considere o exemplo que subseqüente.
EXEMPLO 2.5
A Figura 2.10 mostra a conexão de dois circuitos fictícios que operam em paralelo,
conectados entre as barras 1 e 2. Calcule o circuito equivalente em pu desses circuitos,
entre as barras 1 e 2, sabendo-se que a base de potência é igual a 100 MVA e as bases de
tensão, no lado de alta e de baixa são iguais a 230 kV e 13,8 kV , respectivamente. Ambas
as linhas de transmissão são representadas por um modelo de linha curta, em que R = 0
e X = 0, 1 pu, na base fornecida. Cada transformador tem potência nominal igual a 200
MVA e reatância igual a 10%. No entanto, suas relações de transformação de tensão são
13 kV /230 kV , para T1, e 13, 8 kV /230 kV , para T2.
Figura 2.10 Interligações em paralelo - situação onde ocorre conflito de base
Solução
Em função dos dados das linhas, a base de tensão no lado de baixa é definida em
13,8 kV . Ao se refletir essa base, utilizando-se a relação de transformação do transformador T2, a base no lado de alta será 230 kV. Agora, refletindo-se a base tendo a relação
de T1, no lado de alta, ter-se-ía uma base de 13, 8 × 230
13 = 244, 15 6= 230 kV . Assim
ocorre o que se denomina conflito de base, porque uma base no lado de baixa tensão leva
a duas bases distintas no lado de alta tensão. Para corrigir esse problema, os dois trans-
2.4. TRANSFORMADOR DE POTÊNCIA
29
formadores devem ser ajustados para uma mesma relação de transformação. Isto pode ser
obtido, por exemplo, supondo-se que o transformador T1 possui tap no lado de baixa. Explorando esse fato, ajusta-se então esse tap fictício para a tensão 13, 8 kV , igual à tensão
base do lado de baixa.
O tap do transformador T1 deve ser ajustado para a = 13/13, 8 = 0, 942 pu.
As reatâncias de cada transformador devem ser convertidas para a base 100 MVA.
100
= 0, 05 pu. Isto significa dizer que a admitância é
Logo, na nova base, XT = 0, 1 × 200
ykm = − j20 pu. Os parâmetros do circuito π -equivalente para o transformador T1 são:
A = 0, 942 × (− j20) = − j18, 84 pu; B = 0, 942(0, 942 − 1) × (− j20) = j1, 029 pu; e
C = (1 − 0, 942) × (− j20) = − j1, 093 pu.
O transformador T2 opera com tap nominal. Assim, para esse transformador, existe
apenas o ramo série do circuito π -equivalente. Esse ramo tem admitância igual à − j20 pu.
O circuito elétrico equivalente para as interligações em paralelo é mostrado na
Figura 2.11. Os dados dos elementos passivos de circuito foram convertidos para impedância.
Figura 2.11 Circuito elétrico equivalente das interligações em paralelo
No exemplo a seguir, uma aplicação na qual uma linha está conectada a um transformador, que por sua vez supre uma carga.
EXEMPLO 2.6
A Figura 2.12 mostra o a conexão de uma carga a um gerador, o qual está conectado
2. MODELAGEM DE EQUIPAMENTOS
30
à extremidade de uma linha de transmissão. Essa linha conecta-se ao lado de baixa tensão
de um transformador, cujo lado de alta supre a carga. O transformador apresenta tap
no lado de baixa, estando esse ajustado em +1 kV acima do valor da tensão nominal do
enrolamento. O transformador tem potência nominal igual à 50 MVA, reatância igual
à 5% e relação de transformação 10 kV /100 kV . A linha de transmissão apresenta os
seguintes parâmetros: tensão nominal de 10 kV , R = 0, 05 Ω, X = 0, 1 Ω e carregamento
de 4 MVar. A carga é composta por uma parcela ativa de 10 MW e outra reativa de 3
MVar. Adote base de potência de 100 MVA e de tensão igual a 10 kV no lado de baixa do
transformador. Considerando que a carga está funcionando sob tensão de 97 kV , calcule:
• a potência ativa e reativa que é entregue na barra 1 (fornecimento do gerador);
• a tensão, em kV , e a corrente que flui do gerador, em A, para a barra 1.
Figura 2.12 Linha e transformador atendendo a uma carga
Solução
Inicialmente, deve-se montar o circuito elétrico equivalente referente ao sistema
elétrico.
Sendo a base de potência do sistema 100 MVA e de tensão 10 kV no lado de baixa, a
reatância do transformador é alterada na nova base para XT = 0, 05 × 100
50 = 0, 1 pu. Como
o transformador está operando com tap fora do nominal, torna-se necessário calcular os
parâmetros levando-se em conta esse tap. O valor ajustado corresponde a a = 11/10 =
2.4. TRANSFORMADOR DE POTÊNCIA
31
1, 1 pu. Então os parâmetros são: ykm = − j10 pu, A = 1, 1(− j10) = − j11 pu; B =
− j1, 21 pu; C = j1, 1 pu (esse valor de C deve ser atribuído à admitância que fica do lado
do tap no circuito).
2
10
A base de impedância no lado da linha de transmissão é ZB = 100
= 1 Ω. Então
R = 0, 05/1 = 0, 05 pu; X = 0, 1/1 = 0, 1 pu. Por meio do carregamento da linha, Qsh ,
que corresponde à potência reativa gerada pela linha, através dos capacitores, calcula-se
a admitância shunt, Y . Sabe-se que, em pu, Qsh = YVk , onde Vk é a magnitude da tensão
na extremidade da linha. Supõe-se que essa tensão seja igual à nominal da linha. Logo,
em pu, Qsh = Y . Então, Y = Qsh = 4/100 = 0, 04 pu.
A magnitude da tensão na carga é V3 = 97/100 = 0, 97 pu. Adotando-se a barra 3
como a referência de fase, faz-se V 3 = 0, 97∠0o. A potência da carga, em pu, é S = 0, 1 +
∗
j0,03
= 0, 1076∠ − 16, 7o.
j0, 03. Então a corrente que circula pela carga é I 3 = VS ∗ = 0,1−
0,97
3
As demais correntes e quedas de tensão no circuito devem ser calculadas a fim
de se determinar a tensão V 1 do gerador. Realizando-se esse procedimento no circuito
elétrico (as admitâncias são indicadas no circuito por adm e todos os dados estão em
pu) mostrado na Figura 2.13, encontram-se os seguintes valores: I 3 = 0, 0958∠15, 8o,
que corresponde a uma corrente em módulo igual a 553,3 A. A potência calculada é
S1 = 0, 1004 − j0, 0265 pu, a qual corresponde a P1 = 10, 04 MW e Q1 = −2, 65 MVar.
Portanto, o gerador gera potência ativa para atender a perda ativa e a parte ativa da carga.
No entanto, precisa absorver potência reativa, apesar da carga ser indutiva.
Figura 2.13 Circuito elétrico equivalente ddo sistema formado por linha, transformador e carga
O módulo da corrente I1 é igual à 0,0927 A. A perda ativa na linha é R|I1 |2 =
32
2. MODELAGEM DE EQUIPAMENTOS
0, 05 × 0, 09272 ≈ 0, 0004 pu. O valor dessa perda somada à parte ativa da carga é igual a
0,1004 pu, que é exatamente igual à potência gerada.
2.5. DISPOSITIVOS FACTS
33
2.5 DISPOSITIVOS FACTS
A complexidade do planejamento e operação de um sistema de potência se deve, em
grande parte, a problemas relacionados com a rede de transmissão. As linhas de transmissão estão sujeitas a limites térmicos ou de estabilidade, que restringem o nível de
potência que pode ser transmitido com segurança. Por conseqüência, podem surgir alguns
problemas relacionados como: pontos de operação não econômicos, baixa capacidade de
carregamento, necessidade de redespacho da geração, de capacidade extra de geração ou
ainda de importação de energia elétrica.
A compensação de potência reativa em sistemas elétricos de potência é necessária
para manter, dentro de padrões aceitáveis, o fluxo de reativo no sistema bem como os
níveis de tensão nos barramentos. Um equipamento importante no sistema de transmissão é o compensador síncrono. Utilizado desde 1930, este equipamento é uma máquina
síncrona que gira sem torque de uma turbina ou carga mecânica. Controlando a sua corrente de excitação, ele poderá gerar (superexcitado) ou absorver (subexcitado) potência
reativa. É também uma excelente fonte para amortecimento de oscilações durante transitórios (curto-circuito). Pode gerar até duas vezes a potência reativa durante transitórios.
Porém, tendo em vista a expansão das redes a nível de sistemas interligados, tornou-se
necessário o desenvolvimento de meios para controlar diretamente os fluxos de potência
em determinadas linhas. O controle dos fluxos pode direcioná-los para regiões que possuam capacidade ociosa de carregamento, aliviando, assim, as regiões com restrição de
transmissão.
Os sistemas com fluxos de potência controláveis, ou Flexible AC Transmission Systems (FACTS), proporcionam a concepção de vários novos dispositivos para o controle
dos fluxos nas redes de energia elétrica. Tais dispositivos permitem:
• aumentar a capacidade de transmissão de potência das redes;
• controlar o fluxo de potência em interligações específicas.
Pode-se dizer que o fluxo de potência em uma rede de transmissão está limitado por
uma combinação dos seguintes fatores principais, entre outros:
• estabilidade;
• fluxos paralelos ou fluxos em malha;
• limites de tensão;
• limites térmicos de linhas ou equipamentos.
2. MODELAGEM DE EQUIPAMENTOS
34
Dispositivos FACTS são aplicáveis, de forma mais direta, às restrições de transmissão de potência relacionadas com problemas de estabilidade. Os fluxos de malha
são aqueles que se formam entre dois sistemas interconectados por uma malha fechada,
mesmo que cada sistema seja capaz de suprir sua própria carga. Fluxos paralelos, por sua
vez, são aqueles que, mesmo fazendo parte da transmissão normal de potência entre duas
companhias, afetam regiões não desejáveis do sistema interconectado. Fluxos de malha
ou fluxos paralelos afetam principalmente a operação em regime permanente. Os efeitos
podem ser observados no perfil de tensões, nas perdas de transmissão ou na redução da
região segura de operação. Apesar do tempo de resposta dos controladores não ser crucial, dispositivos eletrônicos são justificáveis nestes casos quando ajustes freqüentes são
necessários. O controle de tensão é normalmente feito por uma combinação de ajustes na
potência reativa de geradores, compensadores em derivação fixos ou controláveis mecanicamente e transformadores de tensão, também controláveis mecanicamente.
Dispositivos baseados em componentes eletrônicos irão permitir um controle mais
rápido das tensões no caso da ocorrência de transitórios. Os limites térmicos são limites físicos inerentes aos equipamentos dos sistemas de transmissão. Normalmente os
sistemas de potência operam muito abaixo dos seus limites térmicos por questões de segurança no caso de contingências. Os dispositivos FACTS irão afetar a operação do sistema, usualmente em resposta a perturbações críticas, permitindo uma melhor utilização
da sua capacidade térmica. Mesmo quando a questão dos limites não é crítica, o caminho
seguido pelos fluxos de potência tem um impacto importante na operação de um sistema,
tanto em regime permanente como em condições pós-falta. Entre os fatores que podem
ser afetados estão o custo de operação, o controle de reativos e de tensão. Controladores
baseados em eletrônica de potência ampliam os meios de controle das rotas de transmissão, principalmente por permitirem um controle contínuo e operações freqüentes.
Os dispositivos FACTS são concebidos de acordo com a necessidade do tipo de
controle requerido. A seguir são mencionadas as principais concepções características de
um sistema de energia elétrica.
Inicialmente, considere uma interligação, que pode ser uma linha de transmissão
curta, sem perda ativa (R=0), conforme mostrado na Figura 2.1 vista anteriormente. A
o
corrente Ii entre o terminal de entrada i e o terminal de saída o da linha é I i = V i −V
jX .
∗
Por sua vez, a potência fluindo do terminal i para o o é Sio = V i I i = Pio + jQio . Então
∗
∗
∗
∗
V −V o
V iV i −V iV o
j|V i |2 − |V i ||V o |∠(90o + θi − θo )
Sio = V i i
=j
=
− jX
X
X
onde θi e θo são os ângulos de V i e V o , respectivamente.
A expressão (2.12) pode ser rearranjada da seguinte forma:
(2.12)
2.5. DISPOSITIVOS FACTS
Sio =
35
j|V i |2 |V i ||V o |
j|V i |2 |V i ||V o |∠(90o + δ )
−
=
−
[−sen(δ ) + jcos(δ )] (2.13)
X
X
X
X
onde δ = θi − θo é denominada abertura angular da interligação. Este ângulo é positivo,
caso a potência ativa flua do terminal i para o o e negativo em caso contrário.
o|
De (2.13), conclui-se que o fluxo de potência ativa de i para o é Pio = |V i ||V
X sen(δ ),
2
o|
ao passo que o fluxo de potência reativa é Qio = |VXi | − |V i ||V
X cos(δ ). A respeito do controle da potência ativa e reativa, observa-se o seguinte:
o
0|
• a potência ativa máxima da interligação é |V i ||V
X , ocorrendo quando δ = 90 . Esta
característica é conhecida como capacidade máxima de transmissão. Na prática,
esta restrição não deve ser alcançada, porque é um limite de estabilidade (limite de
estabilidade estática), o qual é superado se houver qualquer incremento diferencial
de potência ativa na interligação.
• O fluxo ativo muda de sentido, caso seja alterado o sinal da abertura angular δ .
Diz-se então que a potência ativa é sensível à variação angular.
• A potência reativa na interligação é pouco sensível à variação da abertura angular.
Entretanto, é bastante sensível à variação de tensão.
Em função das observações anteriores, os dispositivos FACTS podem ser concebidos visando explorar as variáveis que influenciam no controle da potência ativa e da
reativa, ou de ambas simultaneamente.
2.5.1 Compensador Ideal em Derivação
A Figura 2.14 mostra um modelo ideal de um compensador em derivação conectado ao
ponto médio de uma linha de transmissão CA, sem perda ativa. Neste caso, a tensão
na fonte VS é conectada a fim de controlar o fluxo de potência na linha. Para efeito de
simplificação, supõe-se que as tensões VS e VR (carga) tenham a mesma amplitude V e
estejam defasadas por um ângulo δ .
A Figura 2.15 mostra o diagrama fasorial para a situação de operação na qual a
tensão da fonte VM apresenta a mesma amplitude que as tensões nas extremidades da
linha. Neste caso, a potência transmitida da fonte para a carga é
PS =
2V 2
sen(δ /2)
XL
(2.14)
2. MODELAGEM DE EQUIPAMENTOS
36
Figura 2.14 Compensador em derivação ideal
Se nenhuma compensação estiver presente, a potência ativa transmitida será:
PS =
V2
sen(δ )
XL
(2.15)
Comparando (2.14) e (2.15), observa-se que a compensação reativa aumenta a capacidade de transmissão de potência ativa da linha.
Da Figura 2.15 é possível concluir que, como a corrente de compensação IM está em
quadratura com a tensão VM , não existe potência ativa fluindo através do compensador.
Ou seja, apenas potência reativa flui pela fonte VM .
2.5.2 Compensador Série Ideal
A Figura 2.16 mostra um modelo ideal de um compensador série, representado por uma
fonte VC conectada ao ponto médio de uma linha de transmissão CA curta.
A corrente que circula pela linha é
I=
V S −V R −V C
jXL
(2.16)
2.5. DISPOSITIVOS FACTS
37
Figura 2.15 Diagrama fasorial considerando-se o compensador ideal em derivação
Se a tensão V C estiver em quadratura com a corrente, o compensador série não irá
fornecer ou absorver potência ativa. Ou seja, a potência nos terminais da fonte será apenas
reativa. Neste caso, a fonte funciona como se fosse uma reatância (capacitiva ou indutiva).
O fluxo de potência ativa pela linha será:
PS =
V2
sen(δ )
(1 − s)XL
(2.17)
onde |s| < 1 é a taxa de compensação série da linha.
A Figura 2.17 mostra o diagrama fasorial para o compensador série ideal, assumindose que a corrente no compensador seja capacitiva (avançada em relação à tensão). Então,
a fonte funciona como se fosse um capacitor
Outros dispositivos FACTS poderiam ser concebidos utilizando as duas abordagens
anteriores. Um deles é o compensador de ângulo de fase. Este compensador tem como
função controlar a diferença entre os ângulos de fase entre dois sistemas CA, podendo
atuar assim diretamente sobre o fluxo de potência ativa trocado entre esses dois sistemas.
Isto significa que esse compensador pode ter que fornecer ou absorver potência ativa,
bem como potência reativa. Esta é uma característica importante para ser considerada na
38
2. MODELAGEM DE EQUIPAMENTOS
Figura 2.16 Compensador série ideal
síntese de um compensador de ângulo de fase.
Esse compensador pode ser dividido em dois grupos:
Defasador (pahse-shifter) baseado em tiristores;
(Unified power flow controller) UPFC também conhecido como controlador universal
de fluxo de potência, o UPFC é baseado em chaves semicondutoras autocomutadas.
O UPFC é melhor representado considerando-se a conexão simultânea de duas
fontes de tensão controladas: uma em série e a outra em derivação. Uma das principais
vantagens dessa topologia é que as duas fontes podem operar separadamente como dois
compensadores de potência reativa distintos (um em série e o outro em derivação) e compensando ainda potência ativa. Um caso interessante acontece quando uma quantidade de
potência ativa consumida/fornecida por uma das fontes é igual à potência fornecida/consumida
pela outra. Esta característica é especialmente relevante se existir um caminho comum
para que essas potências possam ser trocadas.
2.5.3 Síntese de Compensadores em Derivação usando Tiristores
A Figura 2.18(a) mostra a topologia básica de um reator controlado a tiristor (RCT), o
qual, através do controle dos ângulos de disparo dos tiristores, produz uma reatância in-
2.5. DISPOSITIVOS FACTS
39
Figura 2.17 Diagrama fasorial considerando-se o compensador série ideal
dutiva equivalente, continuamente variável. O RCT é a base do compensador de potência
reativa estático convencional (SVC - Static Var Compensator). Devido ao controle de fase
usado para chavear os tiristores, são geradas correntes harmônicas de baixa ordem pelo
RCT. Transformadores ligados em delta-estrela, bem como a conexão de filtros passivos
são então necessários para reduzir estes harmônicos a níveis aceitáveis.
A Figura 2.18(b) mostra o capacitor chaveado a tiristor (CCT). Neste circuito, os
tiristores são disparados apenas quando uma condição de chaveamento com tensão zero é
alcançada para a chave semicondutora (ZVS - zero voltage switching). Portanto, devido à
sua característica de chaveamento, os tiristores mostrados na figura podem apenas conectar ou desconectar o banco de capacitores ao sistema de potência. Conseqüentemente, o
controle da potência reativa gerada pelo banco chaveado é feito de forma descontínua.
Outra característica importante é que, como o chaveamento é feito em uma freqüência muito baixa, os harmônicos não são geralmente um problema sério nestes compensadores. O uso de um dos compensadores mostrados na Figura 2.18 possibilita, assim,
apenas um tipo de compensação capacitiva ou indutiva. Entretanto, na maioria das aplicações, é desejável ter a possibilidade de ambas características de compensação. O compensador estático de potência reativa foi projetado então para operar nestas condições.
Em geral este compensador é usado como controlador estático de tensão.
40
2. MODELAGEM DE EQUIPAMENTOS
Figura 2.18 dispositivos FACTS baseados em tiristores: (a) RCT, (b) CCT
A Figura 2.19a mostra o diagrama unifilar equivalente de um compensador estático
de reativos (uma fase), enquanto a Figura 2.19b mostra a sua característica de operação.
No circuito correspondente, um reator controlado a tiristor é conectado em paralelo com
um banco capacitivo, que pode ser fixo ou chaveado a tiristor. A capacitância C do compensador estático é calculada de maneira a gerar a máxima potência reativa que o compensador deve fornecer para o sistema. Quando este compensador tem a função de controlar
a tensão é chamado de SVC (Static Voltage Controler).
O circuito mostrado na Figura 2.19a não mostra os filtros passivos, normalmente
necessários a fim de reduzir o efeito dos harmônicos de corrente gerados pelo chaveamento dos tiristores. A Figura 2.19b mostra a característica de operação tensão/corrente
nos terminais do compensador estático. Quando a tensão terminal diminui a capacidade
de corrente do compensador também é reduzida proporcionalmente.
2.5. DISPOSITIVOS FACTS
41
Figura 2.19 Diagrama unifilar de dispositivos FACTS baseados em RCT e CCT
2.5.4 Síntese de Compensadores série usando Tiristores
A Figura 2.20 mostra o diagrama do capacitor série chaveado a tiristor. Neste sistema,
para conectar os capacitores em série com a linha, os tiristores são mantidos cortados. Se
os tiristores conectados em paralelo com os capacitores são disparados, estes capacitores
são curto-circuitados. O disparo dos tiristores, como no caso do capacitor em derivação
chaveado a tiristor, deve ser feito, idealmente, com tensão nula sobre as chaves semicondutoras (ZVS - Zero Voltage Switching). Este sistema de compensação tem a vantagem
de ser muito simples, entretanto não permite um controle contínuo da reatância série.
Observe-se que, se a conexão e desconexão dos bancos capacitivos for feita de maneira
esporádica, possivelmente não ocorrerão problemas devidos aos harmônicos de chaveamento. Entretanto, dependendo da freqüência em que os tiristores são chaveados, tensões
subharmônicas (harmônicos com freqüência menor que a da rede) podem ser geradas.
42
2. MODELAGEM DE EQUIPAMENTOS
Figura 2.20 Capacitor série chaveado a tiristor: módulos discretos
A Figura 2.21 mostra o diagrama de um capacitor série controlado a tiristor (TCSC
- Thyristor Controlled Series Capacitor). Neste compensador, o valor equivalente do
capacitor série pode ser controlado continuamente através do controle dos ângulos de disparo dos tiristores. À primeira vista, este circuito é semelhante ao compensador estático
convencional em derivação, com a diferença que, aqui, ele é conectado em série com a
linha. Como no caso anterior, a operação de chaveamento dos tiristores gera harmônicos
de baixa ordem. Entretanto, o capacitor série associado com a impedância da linha de
transmissão tem se mostrado suficiente para filtrar estes harmônicos.
Um exemplo de aplicação ocorre no Brasil, no qual se tem um conjunto instalado
na subestação de Imperatriz e outro na subestação de Serra da Mesa. Esses dispositivos
são fundamentais para a interligação dos sistemas elétricos Norte-Sul do país. Em princípio, sua função é a de amortecer possíveis oscilações de baixa freqüência entre os dois
sistemas. Entretanto, nada impede de também serem usados para o controle do fluxo de
potência.
2.6. CARGAS
43
Figura 2.21 Capacitor série controlado a tiristor (TCSC): módulo de controle contínuo
2.6 CARGAS
A carga em um SEP pode ser representada de diversas maneiras, dependendo do tipo de
estudo que se deseje. A forma mais comum é a modelagem por um polinômio, função
da magnitude da tensão onde está conectada a carga, constituindo uma composição por
impedância constante, Z, corrente constante, I, e potência constante, P. Em função dos
símbolos, é comum se designar esse modelo polinomial como ZIP. O modelo polinomial
tem a seguinte estrutura para as potências ativa, P, e reativa, Q, da carga:
P(V ) = Po a + bV + cV 2
Q(V ) = Qo d + eV + fV 2
(2.18)
(2.19)
onde Po e Qo são os valores da carga em condições nominais de tensão; V é a magnitude da
tensão na barra; e os coeficientes dos polinômios são parcelas da carga tais que a +b +c =
1 e d + e + f = 1.
Os coeficientes a e d são parcelas de potência constante; b e e são parcelas de
corrente constante; e c e f são parcelas de impedância constante.
2. MODELAGEM DE EQUIPAMENTOS
44
EXEMPLO 2.7
Estabeleça os polinômios que representam uma carga em pu, a qual absorve 40 MW
e 20 MVar. A composição da carga é a descrita como segue. potência ativa: 30% de Z
constante e 20 % de potência constante; potência reativa: 100 % de Z constante. Utilize
base igual a 100 MVA.
SOLUÇÃO
As cargas, em pu, apresentam os seguintes valores em condições nominais: Po =
40/100 = 0, 4 pu e Qo = 20/100 = 0, 2 pu. Então, a composição de potência absorvida
pela carga varia com a tensão de acordo com as expressões.
P(V ) = 0, 4 0, 2 + 0, 5V + 0, 3V 2
Q(V ) = 0, 2V 2
Essa tipo de representação de carga é importante para se entender o procedimento
para levantamento das equações do problema de fluxo de carga - que será visto mais
adiante - e que consiste inicialmente em se determinar as tensões no sistema como um
todo.
Em geral, cargas puramente reativas ou capacitivas são consideradas como 100% Z
constante. Um exemplo de carga dessa natureza são reatores e capacitores.
EXEMPLO 2.8
Um banco trifásico de capacitores, ligação shunt, de 50 MVA, com tensão nominal
de 230 kV é conectado a uma barra cuja tensão nominal também é 230 kV . Determinar a
potência e a reatância por fase do banco, em pu. Considere base de 100 MVA.
SOLUÇÃO
Tratando-se de capacitor ou reator a potência ativa é nula. Além disso, a composição
da parte reativa da carga desses elementos pode ser considerada como 100% Z constante.
A potência reativa QCo em pu é QCo = 50/100 = 0, 5 pu. Portanto, QC (V ) = 0, 5V 2 .
2
V
Sabe-se que, em pu, a reatância do banco, por fase é XC = Q
. Desse modo,
C
1/0, 5 = 2 pu. Então, XC = 2 pu. A impedância será ZC = − j2 pu.
V2
QC
=
Outras composições para a carga, como parcela devido a motores de indução, são
consideradas. Porém, esse conteúdo não será tratado aqui, havendo excelente material
sobre o assunto em referências específicas.
3
MATRIZES DE REDE
3.1 INTRODUÇÃO
Em muitos problemas em sistemas elétricos de potência é usual se lidar com cálculo envolvendo matrizes de ordem elevada. É importante saber como lidar com o problema a fim
de se explorar com eficiência tanto a armazenagem de dados quanto dos procedimentos
de cálculo propriamente dito.
Felizmente, é possível se explorar eficientemente as topologias do sistema e a partir
de algoritmos bem estruturados se formular os problemas de interesse.
Uma matriz importante em análise de redes é a que permite relacionar tensões
nodais (tensões de barra) a injeções de corrente. O interesse aqui é o cálculo dos estados
do sistema em regime permanente ou em baixas freqüências. Diante dessas características, é suficiente considerar a rede de interligação como caracterizada por parâmetros
constantes.
Em se tratando de operação em regime senoidal permanente, a rede pode ser considerada como composta de impedâncias à freqüência industrial, fontes independentes
de corrente e de potência. Levando-se em conta as impedâncias, é possível montar uma
matriz de admitância nodal para a rede como um todo.
O objetivo desse capítulo é fornecer as informações, ilustradas com exemplos, de
como montar a matriz de admitância de rede.
3.2 MATRIZ DE ADMITÂNCIA DE BARRA
Ao invés de se utilizar o termo matriz de admitância nodal, como empregado em circuitos
elétricos, é usual se adotar o termo matriz de admitância de barra, ou simplesmente matriz
Ybus. Esta última nomenclatura é preferida no jargão de sistemas de potência.
Com a finalidade de formulação do problema, considere o circuito elétrico mostrado
na Figura ??. As setas em cada barra indicam injeção de corrente ou, o que é equivalente,
a inserção de uma fonte de corrente independente. No circuito, cada elemento de inter45
3. MATRIZES DE REDE
46
coneção zi j é uma impedância conectando a barra i à barra j . Impedâncias do tipo zi
são impedâncias shunts conectadas da barra à referência (terra). A cada barra está associada uma tensão nodal (ou simplesmente tensão de barra) V i , i = 1, . . ., NB, onde NB é o
número de barras do sistema.
Figura 3.1 Circuito elétrico com três barras
Para o circuito da figura, as equações de balanço de corrente, de acordo com a lei
de Kirchhoff de corrente, são as sequintes:
V 1 −V 2 V 1 V 1 −V 3
+
+
z12
z1
z13
V 2 −V 1 V 2 V 2 −V 3
I2 =
+
+
z12
z2
z23
V 3 −V 1 V 3 V 3 −V 2
+
+
I3 =
z31
z3
z23
I1 =
(3.1)
(3.2)
(3.3)
Rearranjando as equações (3.1) a (3.3), encontra-se o seguinte resultado:
I 1 = Y 11V 1 +Y 12V 2 +Y 13V 3
I 2 = Y 21V 1 +Y 22V 2 +Y 23V 3
I 3 = Y 31V 1 +Y 32V 2 +Y 33V 3
(3.4)
(3.5)
(3.6)
Comparando o conjunto de equações (3.1) a (3.3) e (3.4) a (3.6), cada elemento do
3.2. MATRIZ DE ADMITÂNCIA DE BARRA
47
tipo Yi j , i, j = 1, . . . , NB, com NB = 3, é calculado da seguinte forma no cirduito da Figura
??:
Y12 = −
Y 11 =
1
1
1
+ +
= y12 + y1 + y13
z12 z1 z13
Y 22 =
1
1
1
+ +
= y12 + y2 + y23
z12 z2 z23
Y 33 =
1
1
1
+ +
= y31 + y3 + y32
z31 z3 z32
1
= −y12
z12
Y 13 = −
1
= −y13
z13
Y 23 = −
1
= −y23
z23
Diante do exposto, é possível colocar o conjunto de equações de (3.4) a (3.6) na
forma matricial
I = Yb V
(3.7)
onde I = [I 1 I 2 . . . I NB ]T ; o sobrescrito T designa a transposta de uma matriz ou vetor;
V = [V 1 V 2 . . . V NB ]T ; e Yb é a matriz Ybus, cujos elementos (i, j), de uma forma geral,
são definidos da seguinte forma:
Yij =
L
NB
k=1
k=1
∑ yik + ∑ yk
se i = j
−yi j
se i 6= j
(3.8)
onde yik é a admitância de interconexão entre a barra i e a k ; yk é a admitância da barra
i que está ligada ao terra; L é o número de ligações na rede.
Os termos dos somatórios definidos em (3.8) aplicam-se somente para as conexões
da barra i com a barra k e para as conexões da referida barra para o terra. Não havendo
conexão com a barra i , a admitância yik ou yk é nula.
Observe-se que a notação para elemento da matriz Ybus é em letra maíuscula (por
exemplo, Y i j ), enquanto para admitância de interconexão é minúscula (por exemplo, yi j ).
Esta convenção será adotado ao longo do texto.
EXEMPLO 3.1
3. MATRIZES DE REDE
48
Um sistema elétrico é formado pela conexão de três barras. A barra 1 é ligada à
barra 2 por meio de um transformador com tap no lado da barra 2 , ajustado em 1,1
pu. A reatância do transformador é igual a 0,1 pu. Uma segunda ligação existe entre a
barra 2 e a 3 , por meio de uma linha de transmissão média cujos valores em pu são:
R = 0, 05 pu, X = 0, 10 pu e admitância shunt total igual a 0,2 pu. Calcule a matriz Ybus
desse sistema.
SOLUÇÃO
As admitâncias do circuito equivalente do transformador são: A = 1, 1(− j10) =
− j11 pu; B = 1, 1(1, 1 − 1)(− j10) = − j1, 1 pu; e C = (1 − 1, 1)(− j10) = j1 pu.
A Figura 3.1 mostra o circuito elétrico equivalente, com os elementos de cicuitos
dados em forma de admitâncias.
Figura 3.2 Circuito elétrico equivalente para rede elétrica de três barras
Utilizando-se a expressão (3.8) para cálculo dos elementos da Ybus, encontra-se a
seguinte matriz:
− j12, 1
j11
0
4 − j17, 9 −4 + j8
Yb = j11
0
−4 + j8 4 − j7, 9
Observe-se que a matriz Ybus é complexa, podendo ser desmembrada da seguinte
forma: Yb = G + jB, sendo G = real(Yb ) e B = imag(Yb ).
3.3. MATRIZ DE IMPEDÂNCIA DE BARRA
49
A separação em parte real e imaginária é necessário para a formulação do problema
de fluxo de carga, no qual são utilizadas apenas equações com grandezas reais.
A matriz Ybus, para redes de grande porte, é esparsa. Isto é, apresenta poucos
elementos não-nulos comparados ao número total de elementos nulos.
3.3 MATRIZ DE IMPEDÂNCIA DE BARRA
Em problemas de análise de curto-circuito, o interesse é sobre a distribuição das correntes
pós-falta imediatamente após uma falta. Este tipo de problema pode ser formulado como
inserindo-se uma fonte de tensão na barra sob falta, e considerando as demais com injeção
nula de corrente. Então é possível aproveitar as informações relativas sobre a matriz Ybus
para montar um sistema de equações, no qual se tem interesse em determinar as tensões
de barra. A partir dessas tensões, calcula-se a distribuição de correntes pelos elementos
de circuito.
Aqui, abordar-se-á somente cálculos envolvendo a seqüência positiva da rede. Conseqüentemente, para a análise de falta, é possível se determinar as correntes devido a uma
falta trifásica em um determinado barramento. No entanto, desde que a modelagem seja
feita adequadamente, por exemplo, levando em conta a influência de impedâncias mútuas,
a metodologia pode ser aplicada para outros tipos de falta.
A relação entre tensões de barra e corrente é calculada como segue.
V = Y−1
b I
(3.9)
Em (3.9), a inversa deve ser realizada implicitamente em caso de sistemas de grande
porte. Isto evita uso desnecessário de memória, uma vez que a inversa de Y b é uma matriz
normalmente cheia.
Define-se a matriz inversa em (3.9) como Zb = Y−1
b , a qual é conhecida também
como matriz de impedância de barra ou matriz Zbus. Estas designações são pelo fato da
matriz ser compostas por elementos que dependem de impedâncias de interconexões, ao
passo que a matriz Ybus é formada a partir de admitâncias.
EXEMPLO 3.2
No exemplo 3.1, calcule a matriz de impedância de barra associada ao sistema e a
corrente que flui da barra 2 para 3 , quando uma corrente de 3 pu é injetada somente na
barra 1 .
3. MATRIZES DE REDE
50
SOLUÇÃO
A matriz Zbus é a inversa da Ybus. Assim
0, 0104 − j4, 0288
0, 0115 − j4, 5226 −0, 0115 − j4, 5683
0, 0115 − j4, 5226
0, 0126 − j4, 9749 −0, 0126 − j5, 0251
Zb = Y−1
b =
−0, 0115 − j4, 5683 −0, 0126 − j5, 0251 0, 0126 − j4, 9749
As tensões nos barramentos devido à injeção de uma corrente de 3 pu na barra 1 são
calculadas da seguinte forma:
V1
0, 0104 − j4, 0288
0, 0115 − j4, 5226 −0, 0115 − j4, 5683
1
V 2 = 0, 0115 − j4, 5226
0, 0126 − j4, 9749 −0, 0126 − j5, 0251 0
V3
−0, 0115 − j4, 5683 −0, 0126 − j5, 0251 0, 0126 − j4, 9749
0
O resultado encontrado é V 1 = 0, 0104 − j4, 0288 pu; V 2 = 0, 0115 − j4, 5226 pu;
e V 3 = −0, 0115 − j4, 5683 pu. Então a corrente fluindo nessas condições da barra 2
para 3 é
I 23 =
(0, 0115 − j4, 5226) − (−0, 0115 − j4, 5683)
+ j0, 1(0, 0115− j4, 5226) = 0, 9091 pu
0, 05 + j0, 1
No capítulo seguinte será utilizada a abordagem da matriz Ybus para aplicação ao
problema de fluxo de carga em regime permanente.


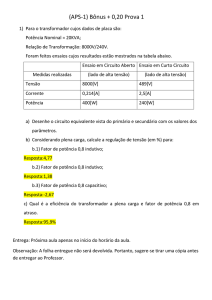

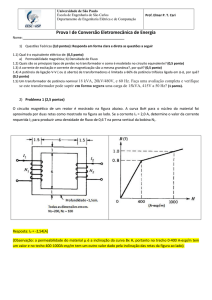

![I) Os ensaios de um transformador monofásico de 10 [kVA], 2.200](http://s1.studylibpt.com/store/data/000932973_1-0b7ab7de6203df074f1655674d08071c-300x300.png)