DESENVOLVIMENTO DE UMA MÃO ROBÓTICA ACIONADA POR
MÚSCULOS ARTIFICIAS PRODUZIDOS COM POLÍMERO
ELETROATIVO(1)
Marcelo Belchior Snovarski Fonseca(2), Wang Chong(3)
(1)
Trabalho executado com recursos do Edital 121643/2015-8 do Conselho Nacional de Desenvolvimento Científico e
Tecnológico – CNPq.
(2) Aluno do curso de Graduação em Engenharia Mecânica da Universidade Federal do Pampa – UNIPAMPA – campus
Alegrete. Bolsista de Iniciação Tecnológica do CNPq. E-mail: [email protected];
(3) Professor Doutor do curso de Graduação em Engenharia Mecânica da Universidade Federal do Pampa – UNIPAMPA
– campus Alegrete. E-mail: [email protected].
Palavras-Chave: EAP’s, Músculos Artificiais, Polímeros Eletroativos, Robótica, Automação.
INTRODUÇÃO
O uso de polímeros eletroativos vem ganhando espaço na robótica e automação pelas inúmeras
vantagens que apresentam frente aos outros tipos de atuadores que existem no mercado. A produção de
músculos artificias que simulem o comportamento e a capacidade dos músculos humanos é uma área com
um crescimento considerável. (Wallace 2008, Bar-Cohen 2004)
O principal objetivo deste trabalho é desenvolver uma mão robótica utilizando atuadores construídos
com polímeros eletroativos, com a finalidade de simular o comportamento dos músculos artificiais. Como
objetivos específicos, tem-se: (1) obter dados eletromecânicos do funcionamento dos atuadores, (2) verificar
a influência da tensão de acionamento no raio de curvatura dos dedos da mão robótica e (3) testar os limites
eletromecânicos (testes de fadiga) dos atuadores. Este trabalho faz parte de uma sequência de estudos e
desenvolvimentos alcançados em três anos.
METODOLOGIA
Todo o trabalho foi executado seguindo um plano de tarefas que consistia em:
Escolher o polímero a ser utilizado para a confecção dos atuadores;
Definir a configuração de montagem dos atuadores;
Escolher ou desenvolver um mecanismo que simulasse o funcionamento da mão humana;
Montagem do sistema da mão robótica e primeiros testes para verificar possíveis otimizações;
Coleta dos dados eletromecânicos;
Execução dos testes de limite eletromecânicos até a falha do material e conclusão do
trabalho.
O material utilizado foi o polímero VHB 4905 da empresa 3M. A configuração de montagem escolhida
para os atuadores, após testes de eficiência, foi definida como a de multicamadas lineares. O mecanismo
utilizado como mão robótica foi uma mão de brinquedo da empresa Glassite. A montagem dos atuadores foi
feita similarmente aos músculos naturais da mão humana. Os dados foram coletados com um sistema
desenvolvido com microcontrolador programável ATMEGA 328PU, células de carga e medidores de
temperatura, tensão e corrente elétrica.
RESULTADOS E DISCUSSÃO
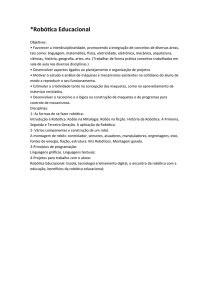
Os comportamentos da temperatura dos atuadores versus frequência de acionamento e da tensão
de aplicação nos atuadores versus a diminuição do raio de curvatura dos dedos são, aproximadamente,
lineares conforme mostra a figura 1. Isso reafirma uma característica positiva dos polímeros eletroativos,
que é o comportamento linear.
Anais do 8º Salão Internacional de Ensino, Pesquisa e Extensão – Universidade Federal do Pampa
Figura 1. Gráficos dos comportamentos eletromecânicos dos atuadores. Resultados aproximadamente
lineares.
Os principais resultados dos limites eletromecânicos podem ser destacados a seguir:
Máximo número de movimentos completados sem falha: 3281 movimentos, sendo acionados
com uma frequência de 0,5Hz e uma tensão de 4,8kV (kilo Volts);
Máxima temperatura de operação dos atuadores: 83,4 oC;
Tensão máxima aplicável nos atuadores: 8,02 kV.
CONCLUSÕES
O comportamento linear dos atuadores frente à frequência de excitação e da tensão de aplicação já
eram esperados, visto o volume de trabalhos que já foram realizados sobre este tema. O que chama a
atenção é o número de movimentos completados sem falha, que é grande para atuadores construídos
manualmente sem ambiente controlado.
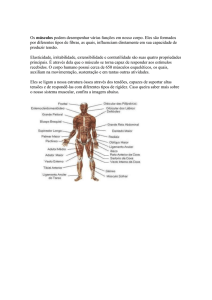
Frisa-se que o número máximo de movimentos completados compreende fechar completamente o
dedo e abri-lo novamente, mantendo a frequência de excitação e a tensão de acionamento. Para fins de
divulgação, a figura 1 mostra a mão robótica montada com os músculos artificiais já instalados.
Figura 1. A mão robótica e os músculos artificias.
Uma autocrítica é necessária para a melhoria do trabalho: um ambiente controlado para a construção
dos atuadores pode melhorar os resultados apresentados neste trabalho. Como trabalhos futuros, serão
feitos o dimensionamento e melhorias na construção dos atuadores para que estes tenham vida infinita em
fadiga, o que é possível segundo as referências sobre o assunto.
REFERÊNCIAS
BAR-COHEN, Y., 2004 “Electroactive polymer (EAP) actuators as artificial muscles: reality, potential, and
challenges”, 2nd ed., SPIE, Washington.
WALLACE, G. G. (2008). The amounts per cycle of polypyrrole electromechanical actuators. Smart Mater.
Struct.,12(3), 468–472.
Anais do 8º Salão Internacional de Ensino, Pesquisa e Extensão – Universidade Federal do Pampa