Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
1
6. Predição Linear e Controlo de Variância Mínima
Objectivo: Projectar controladores discretos lineares para sistemas
com perturbações estocásticas. Preparação para o Controlo Adaptativo.
Referência: AW, Cap. 12
J. Miranda Lemos, A. Bernardino
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
2
O problema da predição
Observa-se uma série temporal de números:
Pretende estimar-se qual o valor que a "série" vai tomar
passos à frente.
Valor a estimar
Dados conhecidos no instante t
y(t+m)=?
y(t-1)
y(t-2)
y(t-3)
t-3
t-2
t-1
J. Miranda Lemos, A. Bernardino
y(t)
t
...
t+m
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
3
O problema da predição tem várias motivações. A mais
óbvia (e porventura mais atraente…) é constituída
pelas aplicações em Economia e Gestão. Um outro
exemplo diz respeito às aplicações em controlo de
sistemas sujeitos a perturbações aleatórias. Este problema
foi tratado pela primeira vez por Kolmogorov e Wiener.
A. Kolmogorov (1903-1987)
Carácteres muito diferentes, ambos foram não só notáveis
matemáticos que dedicaram a sua atenção aos sistemas
estocásticos, mas também tiveram um amplo leque de
interesses em áreas diversificadas.
N. Wiener (1894-1964)
J. Miranda Lemos, A. Bernardino
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
4
A resolução do problema da predição pressupõe:
• A existência de um modelo sobre o modo como os dados são gerados;
• Um critério que permita avaliar a qualidade da predição e escolher a
melhor.
Iremos considerar como classe de modelos sinais aleatórios obtidos pela
passagem de ruído branco por sistemas lineares e invariantes no tempo.
Como critério ir-se-á utilizar o erro quadrático médio de estimação.
J. Miranda Lemos, A. Bernardino
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
5
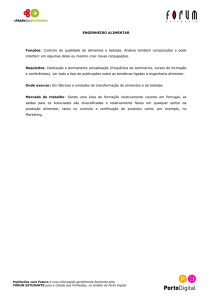
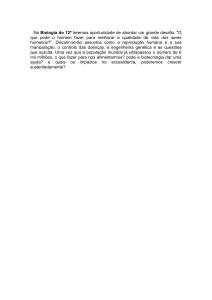
O modelo ARMA
O sinal estacionário y(t) é modelado como o resultado da passagem de ruído
branco através do sistema linear C(z) / A(z):
5
3
4
2
3
e(t)
1
0
C(z)
A(z)
y(t)
2
1
0
-1
-2
-1
-3
-2
-3
0
-4
50
100
150
200
250
300
350
400
-5
0
50
100
150
200
250
300
350
400
A este modelo dá-se o nome de ARMA (Auto-Regressivo, de Média Móvel).
J. Miranda Lemos, A. Bernardino
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
6
O modelo ARMA no operador atraso
Polinómio recíproco
−
=
−
−
−
= +
=
Multiplicando o modelo ARMA por q-n:
q-n A(q) y(t) = q-n C(q) e(t)
A*(q-1)
C*(q-1)
O modelo ARMA no operador atraso unitário é
A*(q-1) y(t) = C*(q-1) e(t)
J. Miranda Lemos, A. Bernardino
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
7
O problema de predição com custo de erro quadrático médio
Determinar
∧
+
≥
que depende apenas das observações de y feitas
até ao instante t, que minimiza a variância em regime estacionário do erro de
predição:
∧
E [(y(t + m) - y (t + m | t))2 | Ot]
Observações
feitas até t
Observações
Predição
de y feitas até
ao instante t
J. Miranda Lemos, A. Bernardino
t
t+m
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
8
Solução do problema de predição
+
−
=
+
−
Expande-se C* / A* por divisão longa
C * (q−1 )
= 1 + f1 q-1 + ... + fm-1 q-m+1 + fm q-m + fm-1 q-m-1 + ...
−1
A * (q )
Fm*(q-1)
q-m
−
−
y(t + m) = e(t + m) + f1 e(t + m - 1) + ... + fm-1 e(t + 1) + fm e(t) + fm+1 e(t - 1) + ...
ε
Depende apenas das
amostras do ruído futuras
J. Miranda Lemos, A. Bernardino
Depende do ruído até
ao instante t
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
−
A equação:
−
6-Predição linear e controlo de variância mínima
-1
= Fm*(q ) + q
9
−
-m
−
permite a separação dos termos que afectam y(t+m) em duas parcelas:
•
A parcela dos termos que já ocorreram até ao instante t;
•
A parcela ε
dos termos que ocorre de t+1 para diante
+
=ε
+
−
−
Repare-se que a média do produto destas duas parcelas é zero (porquê?).
J. Miranda Lemos, A. Bernardino
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
10
Para obter a expressão do preditor óptimo, considere-se o custo:
[
=
+
−
]
+
Tendo em conta a expressão obtida anteriormente:
−
=
−
−
+
+ε
A
B
As parcelas A e B são independentes e de média nula, pelo que a média do seu
produto é zero. Assim:
=
J. Miranda Lemos, A. Bernardino
−
−
−
+
+
[ε
]
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
−
=
−
−
+
[ε
+
11
]
Tendo em conta a média condicionada, obtém-se (porquê?)
=
−
−
−
+
+
[ε ]
Este termo não depende de
Este termo é mínimo quando se anula
+
O preditor óptimo é portanto
+
J. Miranda Lemos, A. Bernardino
=
−
−
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
12
O preditor óptimo é assim dado por
+
−
=
−
Esta expressão não é útil pois exprime o preditor no sinal
{}
que não é
mensurável directamente. No entanto, como os polinómios A e C têm o
mesmo grau, tem-se
=
Pelo que o preditor óptimo em regime estacionário se escreve:
+
J. Miranda Lemos, A. Bernardino
=
−
−
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
13
Preditor de erro quadrático médio mínimo para sinais ARMA
Dado o modelo ARMA
−
=
o preditor óptimo
−
sendo
−
−
=
um polinómio de grau
J. Miranda Lemos, A. Bernardino
]=σ
passos à frente vem dado por
+
em que
[
com
−
−
=
−
−
−
+
−
−
−
.
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
14
A variância do erro de predição é
[ε ] = [
Dado que
{}
+
+
+
−
+
+
−
+
]
é uma sequência de variáveis aleatórias independentes e de
média nula, ao desenvolver-se o quadrado, os termos cruzados anulam-se, e:
[ε ] =
J. Miranda Lemos, A. Bernardino
+
+
+
+
−
σ
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
15
Predição linear: Exemplo
Determine os preditores 1, 2 e 3 passos à frente do sinal modelado por
=
em que
{}
−
−
+
+
é uma sequência de variáveis aleatórias independentes e
idênticamente distribuídas, de média nula e variância unitária. Determine o
desvio padrão das estimativas.
J. Miranda Lemos, A. Bernardino
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
−
−
−
−
=
−
−
−
−
−
−
−
−
−
−
+
+
−
+
−
−
+
−
−
−
−
−
+
+
−
−
−
+
−
−
−
−
−
−
−
−
J. Miranda Lemos, A. Bernardino
16
−
+
+
−
6-Predição linear e controlo de variância mínima
−
−
−
−
+
−
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
−
−
−
−
−
−
−
−
−
+
+
−
−
−
−
J. Miranda Lemos, A. Bernardino
+
6-Predição linear e controlo de variância mínima
−
−
−
+
−
−
−
−
−
−
+
−
−
−
−
−
+
+
−
−
−
17
−
−
−
−
−
−
−
+
−
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
18
Preditor 1 passo à frente:
−
=
−
+
+
=
−
−
−
+
−
−
−
+
−
−
+
−
Variância do erro de predição 1 passo à frente
σ =
J. Miranda Lemos, A. Bernardino
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
19
Preditor 2 passos à frente:
−
=
−
+
+
=
+
−
−
−
+
−
−
+
−
−
+
−
Variância do erro de predição 2 passos à frente
σ = + −
J. Miranda Lemos, A. Bernardino
=
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
20
Preditor 3 passos à frente:
−
=
−
+
+
=
+
−
−
−
+
−
+
−
+
−
−
+
−
Variância do erro de predição 3 passos à frente
σ = + −
J. Miranda Lemos, A. Bernardino
+ −
=
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
21
Preditor de erro quadrático médio mínimo para sinais ARMAX
Queremos agora considerar o caso em a entrada externa é não nula:
=
+
Seja d o atraso do sistema: No operador atraso, o sistema é dado por:
−
+
=
−
+
−
+
Sejam:
−
−
= +
−
−
J. Miranda Lemos, A. Bernardino
+ +
=
−
−
−
e
+
−
−
tais que :
−
−
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
Modelo ARMAX no operador atraso:
−
Multiplique-se o modelo por
−
−
−
−
+
−
=
−
−
+
−
=
+
−
−
+
+
:
−
=
−
22
−
+
−
−
+
−
+
−
Obtém-se:
(
−
−
−
−
)
+
=
−
−
+
−
+
−
+
−
+
−
−
+
ou seja
+
=
J. Miranda Lemos, A. Bernardino
−
−
+
−
−
−
+
IST-Secção de Sistemas e Controlo
Modelação, Identificação e Controlo Digital
6-Predição linear e controlo de variância mínima
23
Repare-se que exprimimos y(t+m) como a soma de duas parcelas
incorrelacionadas:
+
=
−
−
+
−
−
+
−
−
preditor de y(t+m)
Assim, o preditor óptimo
+
=
−
+
+
resíduo indep.
passos à frente vem dado por:
−
−
+
−
−
−
+
−
O preditor óptimo depende das saídas até ao instante corrente e da actuação
do sistema até ao instante t+m-d.
J. Miranda Lemos, A. Bernardino
IST-Secção de Sistemas e Controlo