Índice
Dia 05 de fevereiro de 2014. .............................................................................................2
Apresentação................................................................................................................................................... 2
Dia 12 de fevereiro de 2013. .............................................................................................3
-Processador .................................................................................................................................................... 3
-Von Neumann ................................................................................................................................................ 3
-Harvard ........................................................................................................................................................... 4
-Von Neumann x Harvard ................................................................................................................................ 4
-Equipamentos que utilizam a arquitetura Harvard........................................................................................ 5
-RISC x CISC ...................................................................................................................................................... 5
Dia 19 de fevereiro de 2014. .............................................................................................6
Microprocessadores x Microcontroladores .................................................................................................... 6
Bits, Flags, Nibles, Bytes e Words. ................................................................................................................... 6
- PIC16F887 ......................................................................................................................7
CPU RISC de alta performance ........................................................................................................................ 7
Características especiais do microcontrolador ............................................................................................... 7
Características de baixo consumo: .................................................................................................................. 7
Características dos periféricos......................................................................................................................... 8
Dia 05 de fevereiro de 2014.
Apresentação – conversa com os alunos.
Neste dia houve uma conversa com alunos para conhecimento e esclarecimento de alguns
tópicos como:
- Proibição do uso do celular ou outros que façam uso de fones de ouvido ou reprodução de
tipos diversos de mídia na sala de aula, proibição essa imposta pelos órgãos competentes da área da
educação e que o colégio bem como seus colaboradores devem fazer cumprir.
- Comportamento, procurar dar o exemplo de conduta e esperar ser seguido.
- A apresentação propriamente dita, vestir-se adequadamente e proibição do uso de boné, gorro,
toca ou outro tipo qualquer de acessório para uso na cabeça, também essas são regras.
- Possíveis métodos de avaliação como trabalhos, chamada oral, prova bimestral ou outros.
Dia 12 de fevereiro de 2013.
-Processador
O processador é a unidade central de processamento de um computador ou sistema
computacional, normalmente é um circuito integrado que executa instruções de máquina realizando
diversos cálculos e tomadas de decisão, o que o torna o cérebro do computador, pois todas as tarefas
são executas por ele.
Este componente processa os dados que recebe, transformando-os em outros dados que
chamamos de informação, todo processamento realizado é controlado por um programa
desenvolvido por um analista e implementado por um profissional programador ou equipe desses a
fim de realizar uma determinada tarefa ou um lote de tarefas com volumes diversos, precisão e
velocidade, que é o principal objetivo dos sistemas computacionais.
O processador também é denominado CPU (Central Processing Unit) ou UCP (Unidade
Central de Processamento).
Microprocessador é o nome dado ao processador usado em PCs (Computadores Pessoais),
servidor, notebook, Workstation e mainframe usados por pessoas, empresas e instituições em geral e
se deve ao fato das técnicas de construção dos chips que usam uma grande escala de integração de
componentes, ou seja, milhões de componentes discretos em uma pequena pastilha, normalmente de
silício que formam o componente em questão.
Arquitetura VON NEUMANN x HARVARD
-Von Neumann:
A Arquitetura de Von Neumann (de John Von Neumann) é uma arquitetura de computador que
se caracteriza pela possibilidade de uma máquina digital armazenar seus programas no mesmo
espaço de memória que os dados, podendo assim manipular tais programas e dados com um único
barramento.
A máquina proposta por Von Neumann reúne os seguintes componentes: (I) uma memória, (II)
uma unidade aritmética e lógica (ALU), (III) uma unidade central de processamento (CPU),
composta por diversos registradores, e (IV) uma Unidade de Controle (CU), cuja função é a mesma
da tabela de controle da Máquina de Turing universal: buscar um programa na memória, instrução
por instrução, e executá-lo sobre os dados de entrada.
Cada um dos elementos apresentados é realizado à custa de componentes físicos independentes,
cuja implementação tem variado ao longo do tempo, conforme a evolução das tecnologias de
fabricação, desde os relés eletromagnéticos, as válvulas, até aos semicondutores, abrangendo os
transistores e os circuitos integrados, com média, alta ou muito alta densidade de integração (MSI medium scale, LSI - large scale, ou VLSI - very large scale integration), medida em termos de
milhões transistores por pastilha de silício.
As interações entre os elementos exibem tempos típicos de instrução que também têm variado
ao longo do tempo, conforme as tecnologias de fabricação. Atualmente, as CPUs processam
instruções sob o controle de relógios cujos períodos típicos são da ordem de menos de 1
nanosegundo, ou seja, 1−9 segundos. O mesmo vem acontecendo com as memórias que tem
velocidade de barramentos de 800MHz a 2,4GHz. Outras tecnologias são as portas USB, que na sua
versão mais recente USB3.0 pode transferir dados a uma velocidade de até 4,8Gbps.
-Harvard:
A Arquitetura de Harvard baseia-se em um conceito mais recente que a de Von-Neumann,
tendo vindo da necessidade de por o microcontrolador para trabalhar mais rápido. É uma arquitetura
de computador que se distingue das outras por possuir duas memórias diferentes e independentes em
termos de barramento e ligação ao processador.
Baseia-se na separação de barramentos de dados das memórias onde estão as instruções de
programa e das memórias de dados, permitindo que um processador possa acessar as duas
simultaneamente, obtendo um desempenho melhor do que a da Arquitetura de Von Neumann, pois
pode buscar uma nova instrução enquanto executa outra.
A principal vantagem desta arquitetura é dada pela dupla ligação às memórias de dados e
programa (código), permitindo assim que o processador leia uma instrução ao mesmo tempo em que
faz um acesso à memória de dados.
-Von Neumann x Harvard
Nessas distintas arquiteturas, temos vantagens e desvantagens, como se pode observar a seguir:
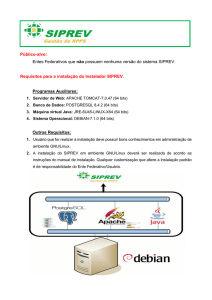
Arquitetura tipo Harvard: Caminhos de dados e de instrução distintos, dessa forma, seus
componentes internos têm a seguinte disposição.
Arquitetura Von-Neumann, processa uma única informação por vez, visto que nessa tecnologia
as instruções e dados percorrem o mesmo barramento, o que torna o processo lento em relação à
arquitetura Harvard.
-
Von Neumann
Arquitetura mais simples.
Mais lento, pois não permite acesso simultâneo a
dados e instruções.
Geralmente CISC.
Alguns exemplos de componentes com arquitetura
Von Neumann:
- 4004 – processador com 46 instruções.
- 8080 – Processador com 78 instruções.
- 8085 – Processador com 150 instruções.
- Z80 – Processador com mais de 500 instruções.
- 8051 – Microcontrolador com 111 instruções.
-
Harvard
Arquitetura mais complexa.
Mais rápido, pois permite acesso simultâneo a
dados e instruções.
Geralmente RISC
Permite o Pipelining.
Alguns exemplos de componentes com arquitetura
Von Neumann:
- Intel 8086 e 8088
- Microcontroladores PIC – 35 instruções na versão
PIC16.
Normalmente a arquitetura Havard também possui um repertório com menos instruções do que
a de Von-Neumann.
Os microcontroladores com arquitetura Havard são também conhecidos como
"microcontroladores RISC" (Reduced Instruction Set Computer - Computador com Conjunto
Reduzido de Instruções), e os microcontroladores com uma arquitetura Von-Neumann, são
conhecidos como "microcontroladores CISC" (Complex Instruction Set Computer - Computador
com um Conjunto Complexo de Instruções), apesar de isso não ser uma regra.
-Equipamentos que utilizam a arquitetura Harvard:
Os PICs (microcontroladores PIC) são uma família de microcontroladores fabricados pela
Microchip Technology, que processam dados de 8 bits, de 16 bits e mais recentemente 32 bits, com
extensa variedade de modelos e periféricos internos, com arquitetura Harvard e conjunto de
instruções RISC (componentes que começam com conjuntos de 35 instruções), com recursos de
programação por Memória flash, EEPROM e OTP. Os microcontroladores PIC têm famílias com
núcleos de processamento de 12 bits, 14 bits e 16 bits e trabalham em velocidades de 0kHz (ou DC)
a 48MHz, usando ciclo de instrução de 4 períodos de clock, o que permite uma velocidade de no
máximo 12 MIPS para essas famílias, podendo ser mais rápidos em outras famílias. Há o
reconhecimento de interrupções tanto externas como de periféricos internos. Funcionam com tensões
de alimentação de 2 a 6V e os modelos possuem encapsulamento de 6 a 100 pinos em diversos
formatos (SOT23, DIP, SOIC, TQFP, etc.).
Fonte:
http://sistemasuniban.blogspot.com.br/2010/04/arquiterura-von-neumann-vs-harvard.html
-RISC x CISC
Seguem alguns links sobre as diferenças, vantagens e desvantagens destes dois sistemas de
processadores.
http://www.gruponetcampos.com.br/2011/03/arquitetura-cisc-e-risc-qual-diferenca/
http://pt.wikipedia.org/wiki/CISC
Dia 19 de fevereiro de 2014.
Microprocessadores x Microcontroladores
Basicamente podemos dizer que:
- Microprocessador é um componente eletrônico composto por uma unidade central de
processamento, barramento de endereço, barramento de dados e barramento de controle, não possui
memória nem periféricos (temporizadores, conversores ADC ou DAC, hardware de comunicação
serial, entre outros), devendo esses serem ligados externamente no projeto computacional que usa o
Microprocessador escolhido.
- Microcontrolador é um componente eletrônico que tem os mesmos recursos do
microprocessador, porém já tem em seu chip a memória de programa, a memória de dados e vários
periféricos, tudo em um encapsulamento único.
Bits, Flags, Nibles, Bytes e Words.
Em sistemas computacionais eletrônicos a base numérica é a binária, onde os dígitos variam
entre 0 e 1, onde o 0 equivale a 0Vcc ou estar ligado ao GND do circuito e o 1 equivale a +Vcc, ou
seja, em um circuito alimentado por +5Vcc essa será a tensão equivalente ao digito 1.
Cada dígito pode ser tratado de maneira individual ou em conjunto o que nos dá as seguintes
possibilidades:
Bit
- Um bit é a menor unidade em um sistema digital podendo, por exemplo, endereçar apenas
duas possibilidades, 0 e 1.
Flag
- Um flag contém apenas um bit e normalmente é parte de um byte, mas especificamente um
registrador, em sistemas computacionais microcontrolados os registradores são amplamente usados
para configurar dispositivos ou representar o status dos dispositivos, um flag pode ser usado, por
exemplo, para ligar ou desligar um determinado dispositivo ou periférico do microcontrolador em
uso.
Nibles
- Um nible é um conjunto de 4 bits o que permite 16 combinações.
Byte
- Um byte é um conjunto de 8 bits, ou dois nibles, que permite 256 combinações, é a unidade
mais usada para determinar capacidades de armazenamento e também transferências de dados
digitais, também pode ser usada com seus multiplicadores mais comuns, Kbytes, Mbytes entre
outros.
Word
- Em sistemas computacionais de estrutura Harvard como os PICs os barramentos podem ter
tamanhos que não são bit, nibles ou bytes esses barramentos podem ter tamanhos de 12, 14, 16 ou
outras capacidades em bits, para esses tamanhos de barramentos damos o nome de words.
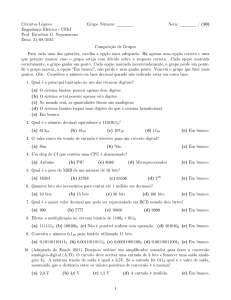
- PIC16F887
O microcontrolador escolhido para nossos estudos é o PIC16F887, um microprocessador da
família de 8bits da MICROCHIP que pode ser encontrando e vários encapsulamentos entre eles o
DIP de 40 pinos o que facilita seu uso prático, seguem abaixo as principais características deste PIC:
CPU RISC de alta performance.
•
•
•
•
•
•
•
•
Apenas 35 instruções.
Maioria das instruções realizadas em um ciclo de máquina exceto as de desvio.
Velocidade de operação de DC a 20MHz com ciclo de DC a 200ns.
Capacidade de interrupção.
Pilha com 8 endereços de retorno por hardware.
8K x 14 words de memória de programa flash.
368 bytes de memória RAM.
256 bytes de memória EEPROM.
Características especiais do microcontrolador.
•
•
•
•
•
•
•
•
•
•
•
•
Oscilador interno de precisão.
o Calibrado em fábrica com precisão de 1%.
o Frequências de 31KHz a 8MHz selecionável por software.
o Ajuste fino via software.
o Modo de partida com duas velocidades.
o Detector de falha no oscilador a cristal para operações críticas.
o Troca o tipo de oscilador durante a execução do programa para baixar consumo.
Função SLEEP para redução de consumo.
Tensão de trabalho de 2,0Vcc a 5Vcc.
Faixa de temperatura de trabalho industrial e estendida.
Power On Reset (POR).
Power-up Timer (PWRT) e Oscillator Start-up Timer (OST).
Brown-out Reset (BOR) com opções de controle por software.
Watchdog Timer (WDT) melhorado com baixo consumo, com oscilador interno (selecionável por
software até 268 segundos com o uso de prescaler) e controle de habilitação por software.
Proteção de código de programa.
Alta capacidade de gravação das memórias FLASH e EEPROM:
o 100.000 de ciclos de escrita para a memoria FLASH.
o 1.000.000 de ciclos de escrita para a memoria EEPROM.
o Mínimo de 40 anos de retenção dos dados das memorias FLASH e EEPROM.
A memória de programa pode ser gravada durante a execução do programa.
Capacidade de gravação e depuração In Circuit.
Características de baixo consumo:
• Corrente de Standby:
- 50 nA @ 2.0V
• Corrente de operação:
- 11 µA @ 32 kHz, 2.0V
- 220 µA @ 4 MHz, 2.0V
• Corrente do circuito de Watchdog Timer:
- 1 µA @ 2.0V
Características dos periféricos.
•
•
•
•
•
•
•
•
•
•
•
Até 35 pinos de I/O com controle individual de direção.
o Capacidade de fornecer ou drenar até 20mA por pino.
o Interrupção por mudança de estado.
o Programação individual de resistores de PULL-UP.
o Ultra Low-Power Wake-up (ULPWU).
Módulo comparador analógico com:
o Dois comparadores analógicos.
o Tensão de referencia interna programável em % da alimentação (CVref).
o Tensão de referencia fixa de 0,6V.
o Acesso externo às entradas e saídas dos comparadores.
o Pode ser usado para habilitar ou desabilitar o TIMER1.
Conversor análogo digital:
o Até 14 canais com 10 bits de resolução.
TIMER0 – Temporizador e contador de 8 bits com prescaler programável de 8 bits.
TIMER1 – timer melhorado:
o Temporizador e contador de 16 bits com prescaler.
o Modo de entrada com gate externo.
o Opção de oscilador interno de 32Khz.
TIMER2 – Temporizador e contador de 8 bits, registrador de período, prescaler e postscaler.
Módulo de captura, comparação e PWM melhorado.
o 16 bits de captura com resolução máxima de 12,5nS.
o Comparador com resolução máxima de 200nS.
o PWM com 10 bits de resolução, tempo morto programável, frequência máxima de 20KHz e 1, 2
ou 4 saídas.
Módulo de captura, comparação e PWM:
o 16 bits de captura com resolução máxima de 12,5nS.
o Comparador de 16 bits com resolução máxima de 200nS.
o PWM com resolução de 10 bits e frequência máxima de 20KHz.
Módulo UART melhorado:
o Suporta RS485, RS232 e LIN 2.0.
o Detecção automática de velocidade de transmissão.
o Pode tirar o microcontrolador do estado de SLEEP no START BIT.
In Circuit Serial Programing (ICSP) programação do chip diretamente no circuito via dois pinos.
Master Synchronous Serial Port (MSSP) – este módulo suporta os 4 modos de comunicação SPI a 3 fios e
os modos mestre e escravo do I2C com máscara de endereço.