Pág 1
Fundação Universidade
Federal
CONTROLE
DE DO MOTOR
de INDUÇÃO
Mato Grosso do Sul
DE
Acionamento Eletrônico de Motores
Aula 8 - Controle de velocidade motor de indução
Speed control of Induction Motors
Prof. Márcio Kimpara
FAENG – Faculdade de Engenharias, Arquitetura e
Urbanismo e Geografia
Campo Grande – MS
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 2
Princípios básicos do controle de velocidade
O controle de velocidade/torque do motor de indução requer técnicas
mais elaboradas em comparação com as máquinas CC.
Na aula anterior, encontramos a expressão que
características torque-velocidade do motor de indução:
Tm
relaciona
as
3.Rr .VS2
2
Rr
2
s.s . Rs X s X r
s
Donde se extrai:
smax
Rr
R Xs Xr
2
s
2
Tmax
Prof. Marcio Kimpara
3
V
2
2s R R 2 X X
s
s
r
s
Acionamento Eletrônico de Motores – 2016
2
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 3
Controle de velocidade
Examinando as variáveis da equação, podemos concluir que a
curva torque x velocidade pode ser controlada por, pelo menos,
uma das variáveis a seguir:
• Resistência do rotor ou estator
• Magnitude da tensão do estator
• Frequência da tensão terminal aplicada ao estator
• Indutância do rotor ou estator
Em sistemas modernos, cada uma das técnicas acima por si só não é
suficiente. Entretanto, combinando mais de uma, o controle se torna mais
eficiente. Desta forma, embora não seja evidente apenas examinando a
equação anterior, existem outras técnicas usuais e mais eficientes para
controlar o motor de indução.
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Controle de velocidade
Outras técnicas:
• Controle da magnitude e frequência da tensão (controle escalar)
• Controle vetorial
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
Pág 4
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 5
Controle de velocidade – Método Resistência
Controle de Velocidade de um Motor de Indução com Rotor
Bobinado (anéis)
– Utilização de resistências externas no circuito do rotor
– Ajuste do circuito do rotor – variação de Rr
Tm
Prof. Marcio Kimpara
3.Rr .VS2
2
Rr
2
s.s . Rs X s X r
s
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 6
Controle de velocidade – Resistência Rotórica
• Em uma maquina de rotor bobinado, uma conexão trifásica de
resistores externos pode ser feita aos anéis, como mostrado na
figura anterior.
• O torque desenvolvido pode ser variado através da variação da
resistência Rx. Esse método aumenta o torque de partida, além de
limitar a corrente de partida. A velocidade síncrona e o torque
máximo não são afetados.
• Trata-se de um método ineficiente e haverá desequilíbrio nas
tensões e correntes se as resistências no circuito do rotor não
forem exatamente iguais.
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 7
Controle de velocidade – Resistência Rotórica
• O controle de velocidade por variação da resistência é mais
realista em maquinas com rotores bobinados. Devido à
disponibilidade dos enrolamentos do rotor para a variação da
resistência deste, este tipo de máquina oferece maior flexibilidade
para o controle, mas ha um aumento do custo e necessidade de
manutenção devido aos anéis.
• Controlar a velocidade de um motor através da variação da
resistência não é considerado um método prático para aplicações
de velocidade variável. Este método só é válido para aplicações
que exigem elevado torque de partida.
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 8
Controle de velocidade – Resistência Rotórica
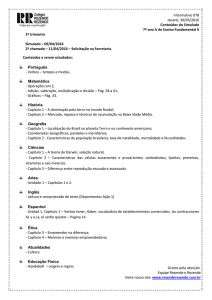
As figuras abaixo ilustram as famílias de curvas torque-velocidade, obtidas para
diferentes valores de Rx.
O aumento na resistência do rotor não afeta o valor do torque Maximo, mas
aumenta o escorregamento no torque máximo. As maquinas de rotor bobinado são
amplamente utilizadas em aplicações que requerem frequentes partidas e
frenagens com torques elevados (por exemplo, guindastes).
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 9
Controle de velocidade – Resistência Rotórica
EXERCÍCIO
• MIT – V=230V, f=60 Hz (379,9911 rad/s), Rs = 0.1Ω, Rr = 0.1Ω,
Ls=0.002 H, Lr = 0.02 H.
Utilizando o Matllab, faça Rext variar de 0.1 a 0.5 ohm e plote as
curvas torque x velocidade
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Controle de velocidade – Resistência
Problemas associados à variação da resistência:
– Sacrifício da eficiência
Pout
Rr leva a
Pin
– Necessita de acesso ao circuito do rotor;
– Variar a resistência do estator é impraticável;
– Faixa estreita e discreta;
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
Pág 10
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 11
Controle de velocidade – Indutância
Ajustando a indutância dos enrolamentos é um método não
realístico devido à:
• O tamanho físico da indutância para produzir uma variação considerável
na velocidade pode ser maior que o próprio motor;
• Ao contrário da variação da resistência, variar a indutância requer
onerosos e elaborados métodos;
• A inserção de indutância reduz o torque de partida;
• A inserção de indutância consume energia reativa, o que provoca um já
baixo, fator de potência.
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 12
Controle de velocidade – Amplitude da tensão
A magnitude da tensão da fonte poderia ser reduzida mantendo-se a frequência
constante, mas esse método é muito inconveniente porque reduziria tanto o fluxo
magnético no entreferro quanto a corrente do rotor , resultando em um decréscimo
no torque proporcional ao quadrado da redução da tensão, além de elevados
valores de escorregamento.
Da equação do torque vê-se que ele é
proporcional ao quadrado da tensão
aplicada ao estator. Assim para um dado
torque, uma redução na tensão produz
uma diminuição na velocidade (um
aumento no escorregamento)
Tm
Prof. Marcio Kimpara
3.Rr .VS2
2
Rr
2
s.s . Rs X s X r
s
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 13
Controle de velocidade – Amplitude da tensão
A tensão do estator pode ser variada através de:
1. Controladores CA trifásicos;
2. Inversores trifásicos do tipo fonte de tensão com estágio CC variável;
3. Inversores trifásicos PWM.
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 14
Controle de velocidade – Amplitude da tensão
EXERCÍCIO
• MIT – V=230V, f=60 Hz (379,9911 rad/s), Rs = 0.1Ω, Rr = 0.1Ω,
Ls=0.002 H, Lr = 0.02 H.
Utilizando o Matllab, faça V variar de 100 a 300 volts e plote as
curvas torque x velocidade
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 15
Controle de velocidade – Amplitude da tensão
Implicações do ajuste de velocidade através da magnitude da tensão
aplicada ao estator:
– Faixa estreita de variação de velocidade; abaixo de uma determinada
tensão o motor pode parar
– A produção do torque varia com V2
– Tendo em mente que a tensão terminal não pode exceder o valor
nominal (devido à isolação), esta técnica só é adequada para reduzir a
velocidade para abaixo do valor nominal
– O escorregamento para o torque máximo não é alterado
– Contudo, este é um excelente método para redução da corrente de
partida (soft-starter)
– Deve ser evitado em situações onde a carga exige torque constante.
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 16
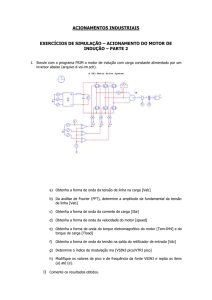
Controle de velocidade – Frequência da tensão
Controle de velocidade através do ajuste da frequência da fonte de
alimentação, mantendo-se a magnitude da tensão constante
Em regime permanente, o motor opera na região de baixo escorregamento,
onde a velocidade do motor é bem próxima à velocidade síncrona.
ns 120
f
p
Uma vez que a velocidade síncrona é diretamente proporcional à
frequência da tensão no estator, qualquer alteração na frequência
resulta numa mudança equivalente na velocidade do motor.
Para alteração da frequência, um
conversor cc/ca pode ser utilizado.
Família de curvas obtidas para
diferentes frequências
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 17
Controle de velocidade – Frequência da tensão
Ao contrário da tensão, a frequência pode ser alterada para um valor
maior ou menor do que o valor nominal
Efeitos de uma frequência excessivamente elevada
• Elevação na velocidade síncrona;
• Decréscimo no torque máximo. O torque máximo é inversamente proporcional à
velocidade síncrona e a reatância equivalente (Dependendo do torque de carga, o
motor pode travar)
• Decréscimo do torque de partida;
• Aumento na velocidade quando o é torque máximo. A elevação na frequência faz
com que o escorregamento de torque máximo decaia;
• Redução da corrente de partida – Além do aumento na reatância em decorrência
do aumento da frequência, em alta frequência, a resistência dos enrolamentos
aumenta devido ao efeito skin.
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 18
Controle de velocidade – Frequência da tensão
Efeitos de uma frequência excessivamente baixa
• A redução da frequência leva à baixa reatância resultando na elevação da
corrente elétrica – Uma redução acentuada da frequência pode provocar uma
corrente elétrica maior que o valor nominal;
• Problemas de saturação magnética.
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 19
Controle de velocidade – Frequência da tensão
EXERCÍCIO
• MIT – V=230V, f=60 Hz (379,9911 rad/s), Rs = 0.1Ω, Rr = 0.1Ω,
Ls=0.002 H, Lr = 0.02 H.
Utilizando o Matllab, faça a frequência variar de 10 a 100 Hz e
plote as curvas torque x velocidade
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 20
Introdução ao Controle escalar
A elevação na frequência da tensão do estator aumenta a velocidade do
motor... mas também diminui o torque máximo.
Por outro lado, o aumento na magnitude da tensão eleva o torque máximo.
Portanto, se combinarmos ambas as características, teremos uma
metodologia de controle na qual a velocidade diminui e o torque é máximo
é mantido.
Esta metodologia é conhecida como V/f ou controle escalar.
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 21
Características Operacionais
Como já vimos,
V
f
Um aumento na frequência resulta numa maior reatância e menor
corrente, portanto, um fluxo reduzido. [first
Para manter
fluxo magnético
row ofo matrix]
constante e, consequentemente o torque, a tensão deve ser elevada de
maneira proporcional. O inverso é análogo.
A implementação deste método é obtida
através dos inversores com modulação
PWM. Os inversores devem manter uma
relação linear entre tensão e frequência até
o ponto de tensão e frequência nominais.
Prof. Marcio Kimpara
PWM
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 22
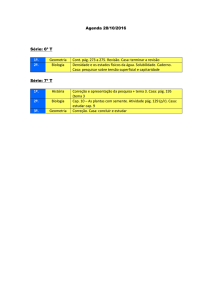
Controle escalar
Caso variemos a frequência e a magnitude da tensão simultaneamente,
mantendo-se a proporção entre ambas constante, obteremos a seguinte
família de curvas de torque x velocidade:
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 23
Controle escalar
Para velocidades síncronas inferiores à velocidade base
(nominal), a frequência da fonte (idealmente senoidal) deve ser
reduzida (abaixo de 60Hz no Brasil) e para evitar a elevação
do fluxo no entreferro, que poderia resultar na saturação do
material ferromagnético, e manter o torque ( T .iR )
constante, a magnitude da tensão também é reduzida de
maneira proporcional.
Para velocidades síncronas superiores à velocidade base
(nominal), a frequência da fonte deve ser elevada (acima de
60Hz). Entretanto, não é possível elevar o módulo da tensão
aplicada e o fluxo magnético no entreferro necessariamente
deverá ser reduzido.
V
f
V
f
Em consequência, tem-se uma redução proporcional no torque gerado,
pois T .iR
. Nessa região, conhecida por enfraquecimento de
campo, a potência mecânica é constante.
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 24
Controle escalar
Outra análise mostra que para determinados valores de frequência o valor da
resistência é muito pequeno quando comparado com o valor da reatância indutiva;
desta maneira podemos, nesta aproximação, e para um método de controle
simples como o escalar, desprezá-lo. Assim teremos que o valor da corrente será
proporcional à tensão de alimentação V, à indutância L e à frequência f. O valor de
indutância L é uma constante do motor, mas a tensão e a frequência são dois
parâmetros que podem ser “controlados” pelo inversor de frequência.
2
'
Quando X eq Rs Rr
2
, a corrente de partida pode ser aproximada para:
V
1
V
I
.
X eq 2 .Leq f
'
r
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 25
Controle escalar
Uma análise da expressão do torque máximo nos mostra que:
Tmáx
V2
2 s Rs Rs2 X eq2
Para uma frequência próxima à nominal, a expressão acima pode ser
aproximada para: (resistência desprezível em comparação à reatância)
Tmáx
V
V2
V2
2 s . X eq
f
2 4 . f .2 . f .Leq
p
X eq
s
Prof. Marcio Kimpara
2
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Topologia para acionamento - Drives
A partir do advento da
modulação PWM para
controle de máquinas
de indução, esquemas
possíveis para obtenção
de tensão e frequência
variáveis
são
apresentados ao lado:
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
Pág 26
CONTROLE DE DO MOTOR
DE INDUÇÃO
Acionamento eletrônico do motor de indução
Tensão CA fixa
(amplitude e
frequência)
Tensão
retificada
Tensão
retificada
filtrada
Prof. Marcio Kimpara
Tensão CA modulada
(amplitude e
frequência variáveis)
Acionamento Eletrônico de Motores – 2016
Pág 27
Inversor ou
Inversor de frequência
CONTROLE DE DO MOTOR
DE INDUÇÃO
Termos em inglês
•Variable Frequency Drive – VFD
•Ajustable Frequency Drive – AFD
•Variable Speed Drive – VSD
•Inverter Drive
•AC Drive
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
Pág 28
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 29
Acionamento do motor de indução
Inversor conectado a retificador
Modos de acionamento:
– Onda quadrada
– Modulação de largura de pulso (PWM)
Prof. Marcio Kimpara
– Acionamento baixa frequência
(condução 120°e 180°)
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 30
Inversor de tensão
Técnicas de modulação
– Modulação senoidal
– Modulação de eliminação de harmônica
Comparação senoide
modulante (Vcontrol) com
uma triangular portadora
(Vtri)
– Modulação por histerese
– Modulação vetorial
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Inversor de tensão
Modulação Senoidal
Trifásica
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
Pág 31
CONTROLE DE DO MOTOR
DE INDUÇÃO
Inversor de tensão
Estratégia V/f cte
Tensão modulada
saída do inversor
Corrente no motor
filtrada pela
própria indutância
do estator
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
Pág 32
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 33
Controle escalar
O controle eletrônico da velocidade e torque desenvolvidos por
motores de indução trifásicos possui inúmeras aplicações em
sistemas industriais e comerciais;
O controle escalar permite um bom desempenho, entretanto, para
aplicações ainda mais complexas e precisas, utiliza-se o controle
vetorial (discutido nas próximas aulas);
O controle escalar consiste na mera variação da magnitude e
frequência da tensão alternada aplicada ao estator. Por isso, ele
também é denominado controle VVVF (Variable Voltage, Variable
Frequency).
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
CONTROLE DE DO MOTOR
DE INDUÇÃO
Controle escalar
Fácil de implementar
Amplamente usado na indústria
Vem perdendo a importância nos últimos tempos, performance
inferior ao controle vetorial
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016
Pág 34
CONTROLE DE DO MOTOR
DE INDUÇÃO
Pág 35
EXERCÍCIO
Um motor de indução trifásico de 230V, 4 polos, 60Hz, 1640rpm possui os
seguintes parâmetros referenciados ao estator: RS 1,2
* As reatâncias foram medidas com
frequência nominal
Rr 0.1
XLS 4
XLr 2
Este motor está acoplado a uma carga com torque constante no valor de 70% do
torque nominal fornecido pelo motor.
a) É possível acionar este motor a 1400 rpm através do controle por redução da
amplitude da tensão de alimentação para 200V? (a frequência é mantida
constante).
b) E se fosse utilizada a estratégia de controle escalar, mantidos os mesmos 200V
para a amplitude da tensão de alimentação?
3.Rr .VS2
Tm
2
Rr
2
s.s . Rs X s X r
s
Prof. Marcio Kimpara
Acionamento Eletrônico de Motores – 2016