ADL13
CAPITULO 3
Modelagem no Domínio
do Tempo
Espaço de Estados
Introdução
técnica clássica, ou no domínio de freqüência.
Vantagens:
• substituição de uma equação diferencial por uma equação algébrica simplifica a
representação de subsistemas individuais e também a modelagem de subsistemas
interconectados.
•fornecem rapidamente informação sobre a estabilidade c sobre a resposta
transitória.
Desvantagem:
•aplicabilidade limitada: só pode ser usada em sistemas lineares e invariantes no
tempo ou em sistemas que possam ser aproximados como tal.
espaço de estados ou abordagem moderna ou
tempo
domínio do
• análise e projeto de uma gama ampla de sistemas: P. exemplo, sistemas nãolineares dotados de folga, saturação e zona morta.
•sistemas com condições iniciais não-nulas.
• Os sistemas variantes no tempo
•Sistemas com múltiplas entradas e múltiplas saídas
•Sistemas com um computador digital na malha ou para modelar sistemas para
simulação digital.
Desvantagem:
• Não é tão intuitiva quanto a abordagem clássica. O projetista deve se envolver com
muitos cálculos antes que a interpretação física do modelo se torne aparente.
Representação em espaço de Estados
1.
2.
3.
4.
5.
Selecionamos um subconjunto particular de todas as variáveis do sistema e
chamamos as variáveis deste subconjunto de variáveis de estado.
Para um sistema de ordem n, escrevemos n equações diferenciais de primeira ordem,
simultâneas em termos das variáveis de estado.
Se conhecermos a condição inicial de todas as variáveis de estado em t0 bem como a
entrada do sistema para t
t0, poderemos resolver as equações diferenciais
simultâneas em função das variáveis de estado para t t0.
Combinamos algebricamente as variáveis de estado com a entrada e obtemos todas
as outras variáveis do sistema para t
t0. Chamamos esta equação algébrica de
equação de saída.
Consideramos as equações de estado e as equações de saída uma representação
viável do sistema. Chama esta representação de representação do sistema no espaço
de estados.
Exemplo:
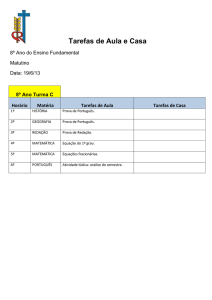
1. Selecionamos a corrente, i(t),
2. Escrevemos a equação de malha,
(3.1)
3. Transformada de Laplace com condições iniciais
nulas,
Fig.3.1 Circuito RL, com
corrente inicial i(0)
(3.2)
Admitindo que a entrada. v(t), seja um degrau unitário u(t), cuja transformada de Laplace é
V(s) = l/s, calculamos I(s) e obtemos
(3.3)
de onde resulta
(3.4)
A função i(t) é um subconjunto de todas as variáveis possíveis do circuito que somos capazes de
calcular com base na Eq. (3.4) se soubermos a condição inicial, i(0), e a entrada, v(t). Assim. i(t) é
uma variável de estado : a equação diferencial (3.1) é uma equação de estado.
4. Podemos agora resolver algebricamente todas as outras variáveis do circuito em termos de i(t) e
da tensão aplicada, v(t). Por exemplo, a tensão sobre o resistor é:
(3.5)
A tensão sobre o indutor é
(3.6)
A derivada da corrente é
(3.7)
Assim, conhecendo-se a variável de estado, i(t), e a entrada, v(t), pode-se obter o valor ou estado de
qualquer variável do circuito em qualquer instante de tempo, t t0.
A Eq. (3.1), que descreve a dinâmica do circuito, não é única. Esta equação poderia ter sido
escrita em termos de qualquer outra variável do circuito. Por exemplo, substituindo i = VR/R na Eq.
(3.1), resulta
(3.8)
que pode ser resolvida conhecendo-se a condição inicial vR(0) = Ri(0)e conhecendo-se v(t). Neste
caso, a variável de estado é vR(t).
Sistema de segunda ordem,
1. Duas variáveis de estado: i(t) e q(t), a carga do capacitor, como as duas variáveis de estado.
2. Escrevendo a equação de malha, resulta
(3.9)
3. Ou, expressando em função da carga:
(3.10)
Mas uma equação diferencial de ordem n pode ser convertida em n equações diferenciais de
primeira ordem, cada uma delas com a seguinte forma
(3.11)
onde cada xi é uma variável de estado e os coeficientes aij e bi são constantes nos sistemas
lineares e invariantes no tempo.
Podemos converter a Eq. (3.10) em duas equações diferenciais de primeira ordem, simultâneas:
(3.12a)
(3.12b)
3. Estas são as equações de estado e podem ser resolvidas simultaneamente para obter as
variáveis de estado, q(t) e i(t) se conhecermos as condições iniciais para q{t) e i(t) e a entrada,
v(t).
4. Com base nessas duas equações, podemos calcular todas as outras variáveis do circuito. Por
exemplo, a tensão sobre o indutor pode ser escrita em termos das variáveis de estado e da
entrada como
(3.13)
AEq. (3.13)é uma equação de saída; dizemos que vL(t)é uma combinação linear das variáveis de
estado, q(t) e i(t), e da entrada, v(t).
5. As equações de estado (3.12) combinadas e a equação de saída (3.13} constituem uma
representação viável circuito, à qual chamamos de uma representação no espaço de estados.
Uma outra escolha de duas variáveis do estado pode ser feita, por exemplo, com vR(t) e vC(t),
O sistema de equações diferenciais de primeira ordem, simultâneas, será:
(3.14)
Novamente, estas equações diferenciais podem ser resolvidas para se obter as variáveis de
estado se forem conhecidas as condições iniciais juntamente com a entrada v(t). Além disso, todas
as outras variáveis do circuito pc ser calculadas como combinação linear dessas variáveis de
estado.
Há alguma restrição na escolha das variáveis de estado? Sim! A restrição é que nenhuma das
variáveis de estado possa ser escrita como uma combinação linear das outras variáveis de estado.
Por exemplo, se vR(t) for escolhida como variável de estado, então i(t) não pode ser escolhida,
porque a primeira pode ser escrita como uma combinação linear de i(t), ou seja, vR(t) = Ri(t).
As variáveis de estado devem ser linearmente independentes;
As equações de estado e de saída podem ser escritas na forma matricial se o sistema for linear.
Assim, as equações de estado,
onde
(3.15)
A equação de saída, Eq. (3.13), pode ser escrita como
(3.16)
y = vL(t); C = [-l/C -R]; x = [q i]t; D = 1; u = v(t)
Chamamos a combinação das Eqs. (3.15) e (3.16) de uma
representação no espaço de estados do circuito