XII Congresso Brasileiro de Meteorologia, Foz de Iguaçu-PR, 2002
DIFERENTES TOPOLOGIAS DE REDES NEURAIS EM ASSIMILAÇÃO DE DADOS
F. P. Härter, H. F. de Campos Velho
Instituto Nacional de Pesquisas Espaciais – INPE
Av. dos Astronautas, 1758
12227-010, São José dos Campos, SP, Brasil
E-mail: [fabrício, haroldo]@lac.inpe.br
RESUMO
Aplica-se as técnicas de redes neurais para assimilar dados durante a integração do Modelo de Lorenz. São
utilizados 2000 exemplos no treinamento nas redes Funções de Base Radial e Perceptron de Múltiplas Camadas.
Apresenta-se experimentos onde observações são inseridas no modelo matemático com freqüência de 0,02 s e se
investiga a qualidade do esquema de assimilação para diferentes arquiteturas destas redes neurais.
1 – INTRODUÇÃO
Assimilação de dados é um importante tema de estudo em ciências atmosféricas. Pode-se definir assimilação de
dados como o processo onde dados observacionais (ruidosos) são inseridos em modelos matemáticos imprecisos
com o objetivo de melhorar a qualidade da previsão. Os métodos de assimilação contínua de dados podem ser
classificados em determinísticos e probabilísticos. Métodos determinísticos incluem Relaxação Dinâmica, Método
Variacional e Transformada de Laplace. Os probabilísticos por sua vez são Interpolação Ótima e Filtro de Kalman
(FK), ver Daley (1991). Destaca-se o FK, que apresenta solução ótima quando o problema a ser resolvido é linear
com forçante aleatória com distribuição gaussiana de densidade de probabilidade, porém o custo computacional
desta técnica é alto.
Como objetivo de resolver o problema do alto custo computacional do FK técnicas de Redes Neurais (RN) tem sido
propostas ao problema de assimilação de dados. Em Nowosad et al. (2000a) foi testado o FK (na versão linear,
estendida e adaptativa) e o método da Transformada de Laplace nos modelos de Lorenz (no seu estado caótico) e
num modelo de água rasa 1D (DYNAMO); em Nowosad et al. (2000b) Redes Neurais tipo Perceptron de Múltiplas
Camadas (RPMC) foram testadas em assimilação de dados para os modelos de Lorenz e Hénon no estado caótico.
Aplicação de redes neurais em assimilação de dados para os modelos de Lorenz e DYNAMO são discutidos em
Nowosad et al. (2000c, 2001). O FK, nas versões estendida e adaptativa, e o PMC mostraram-se boas técnicas para
assimilação de dados nestes modelos conceituais, inclusive quando o sistema dinâmico é não-linear. A
Transformada de Laplace, por sua vez, não apresentou bom resultado quando aplicada a sistemas não-lineares.
Neste trabalho aplica-se as redes neurais Funções de Base Radial (RFBR) e RPMC ao modelo de Lorenz. São
utilizados 2000 exemplos (ou padrões) no treinamento das redes. Apresenta-se experimentos onde observações são
inseridas no modelo matemático com freqüência de 0,02 s e se investiga a qualidade do esquema de assimilação
para diferentes arquiteturas destas RNs.
Nas seções 2 apresenta-se respectivamente o modelo de Lorenz, uma descrição sumárias das RNs usadas neste
trabalho e do FK. Os experimentos numéricos são descritos na seção 2.4. A seção 3 é reservada para resultados e
discussão. Na seção 4 são feitos os comentários finais.
2 – METODOLOGIA
A seguir, apresenta-se o modelo dinâmico usado para testar os resultados dos esquemas de assimilação, bem como
as redes neurais RFBR, RPMC, FK e uma descrição dos Experimentos Numéricos.
3642
XII Congresso Brasileiro de Meteorologia, Foz de Iguaçu-PR, 2002
2.1 – MODELO DE LORENZ
Opta-se por explorar o esquema de assimilação por RNs com o Modelo de Lorenz (Lorenz, 1963), por este ser
caótico, ou seja, pequenas variações nas condições iniciais alteram fortemente a dinâmica da evolução do sistema.
As equações do modelo de Lorenz são
dX
= −σ ( X − Y ) ,
dt
(1)
dY
= RX − Y − XZ ,
dt
(2)
dZ
= XY − bZ .
dt
(3)
Este sistema foi integrado com o método de Euler previsor-corretor, com X 0 = 1,508870 , Y0 = −1,531271 ,
Z 0 = 25,460910 , ∆t = 0.001 , σ = 10 , b = 8 / 3 e R = 28 para que o sistema esteja em estado caótico.
2.2 – REDES NEURAIS
RNs são modelos matemáticos úteis na execução de determinadas tarefas de aprendizagem, tais como, associação e
reconhecimento de padrões, aproximação de funções, controle e filtragem (Haykin, 2001).
A aplicação de uma RN é feita em duas fases, são elas: aprendizagem e ativação. A fase de aprendizagem, também
conhecida como treinamento, consiste no processo de adaptação dos pesos sinápticos das conexões e dos níveis de
limiar (viéses) dos neurônios em resposta às entradas. A ativação consiste no processo de receber uma entrada e
produzir uma saída de acordo com a arquitetura final da rede.
Rede Perceptron de Múltiplas Camadas
A RPMC consiste de uma camada de entrada formada por padrões que serão apresentados a rede durante a fase de
treinamento (também chamados de conjunto de unidades sensoriais ou nós de fonte), uma ou mais camadas
escondidas de nós computacionais e uma camada de saída de nós computacionais. O sinal de entrada se propaga
para frente através da rede, camada por camada. Segundo Haykin (2001), a RPMC tem três características distintas:
1) o modelo de cada neurônio da rede inclui uma função de ativação não-linear, sendo que esta função de ativação
deve ser diferenciável em todos os pontos,
2) a rede contém uma ou mais camadas de neurônios ocultos. Estes neurônios ocultos capacitam a rede à aprender
tarefas complexas extraindo progressivamente as características mais significativas dos padrões de entrada,
3) a rede exibe um alto grau de conectividade, determinada por suas sinapses.
Redes Funções de Base Radial
Girosi e Poggio (1990) baseados no teorema de Kolmogorov, (Kolmogorov, 1957), mostraram que uma rede com
uma única camada oculta é capaz de aproximar com uma precisão pré-definida qualquer função contínua. A
essência da prova de Girosi e Poggio é a seguinte: uma função contínua e limitada sobre um certo intervalo, pode
ser considerada como uma superposição linear de gaussianas. Estas gaussianas por sua vez, podem ser
implementadas na camada oculta da RN cuja função de ativação é uma sigmóide. A precisão da aproximação
dependerá apenas do número de funções gaussianas, ou seja, do número de neurônios da camada oculta (Kovacs,
1996).
3643
XII Congresso Brasileiro de Meteorologia, Foz de Iguaçu-PR, 2002
Redes neurais representando funções sintonizadas em torno de uma região e cujas funções de ativação,
implementadas nos neurônios da camada oculta, são funções gaussianas, denominam-se Redes Neurais de Função
de Base Radial (RFBR).
Do ponto de vista de uma RFBR, aprender é equivalente a encontrar uma superfície, em um espaço
multidimensional que forneça o melhor ajuste para os dados de treinamento, com o critério de melhor ajuste sendo
medido num sentido estatístico (Bennett, 1992).
Tratando-se de redes neurais, dois pontos chaves no processo de aprendizagem precisam ser definidos: (i) qual o
paradigma de aprendizado (supervisionado ou não-supervisionado); e, (ii) após definir-se o paradigma, define-se a
regra de aprendizado, que é a regra segundo a qual os pesos sinápticos dos neurônios são ajustados passo a passo
até o sistema atingir o estado estável.
Neste trabalho, tanto a RFBR como a RPMC foram implementadas com aprendizado por erro-correção (também
conhecido como algoritmo de retropropagação do erro ou Regra Delta de Widrow) e paradigma de aprendizado
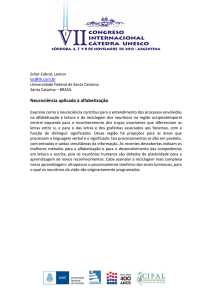
supervisionado. As redes são totalmente conectadas, apresentam uma camada de entrada, apenas uma camada
escondida e a camada de saída. Na Figura-1 ilustra-se as redes implementadas neste artigo.
Xij
θ
∑
vj
θ
ϕ (v j )
∑
ϕ (v j )
∑
ϕ (v j )
∑
vk
ϕ (v k )
XRNi
ϕ (v k )
YRNi
ϕ (v k )
ZRNi
Yij
Zij
∑
vj
vk
XOij
YOij
∑
vj
vk
ZOij
Figura-1: Ilustração da Rede Neural aplicada nesse trabalho.
A seguir resume-se o algoritmo de retropropagação, segundo Haykin (2001), utilizado no treinamento da RFBR e
na RPMC. Ressalta-se que a implementação feita pelos autores deste trabalho apresenta algumas diferenças em
relação ao algoritmo a seguir. Estas diferenças serão mencionadas na seção 2.4, onde os experimentos numéricos
serão descritos.
1 - Iniciação: assumindo nenhuma informação prévia disponível, os pesos sinápticos e limiares são iniciados com
valores que seguem uma distribuição uniforme.
2 - Apresentação dos exemplos de treinamento: apresenta-se uma época de exemplos de treinamento à rede. Para
cada exemplo do conjunto de treinamento executa-se os passo 3 e 4 apresentados a seguir.
3 - Cálculo para Frente (Propagação): sendo um exemplo do conjunto de treinamento representado por
( x(n), d (n)) , com o vetor de entrada x(n) aplicado a camada de entrada de nós sensoriais e o vetor resposta
desejada d (n) apresentado à camada de saída de nós computacionais, calcula-se os campos locais induzidos e
os sinais funcionais camada por camada da rede. O campo local induzido v (jl ) (n) para o neurônio j na
camada- l é
3644
XII Congresso Brasileiro de Meteorologia, Foz de Iguaçu-PR, 2002
m0
v (n) = ∑ θ (jil ) (n) y i(l −1) (n)
(l )
j
(4)
i =0
onde y i( l −1) (n) é o sinal de saída do neurônio i na camada interior (l − 1) , na iteração n , e θ (jil ) (n) é o peso
sináptico do neurônio j da camada l , que é alimentado pelo neurônio i da camada l − 1 . Para i = 0 , temos
y o( l −1) (n) = +1 e θ (j l0) (n) = b (j l ) (n) é o viés aplicado ao neurônio j na camada l . O sinal de saída do neurônio
j na camada l é
y lj = ϕ j (v j (n)) .
(5)
Se o neurônio j está na primeira camada oculta (i.e., l = 1 ), faz-se y (jo ) (n) = x j (n) , x j (n) é o j -ésimo
elemento do vetor de entrada X (n) . Se o neurônio j está na camada de saída (i.e., l = L onde L é
denominado a profundidade da rede), se faz y (j L ) = o j (n)
Calcula-se o sinal de erro
e j ( n) = d j ( n) − o j ( n)
(6)
onde d j (n) é o j -ésimo elemento do vetor resposta desejada d (n) .
4 - Cálculo para Trás (Retropropagação): Calcula-se os gradientes locais da rede definidos por
δ (j l ) (n) = e (j L ) (n)ϕ 'j (v (j L ) (n))
(7)
para o neurônio j da camada de saída L , ou por
δ (j L ) (n) = ϕ 'j (v (jl ) (n))∑ δ k(l +1) (n)θ kj(l +1) (n)
(8)
k
para um neurônio j da camada oculta l , onde o apóstrofo em ϕ 'j (.) representa a diferenciação em relação ao
argumento. Assim, ajusta-se os pesos sinápticos da rede na camada l de acordo com a regra delta generalizada:
θ (jil ) (n + 1) = θ (jil ) (n) + α [θ (jil ) (n − 1)] + ηδ (j l ) (n) y i(l −1) (n)
(9)
onde η é a taxa de aprendizagem e α é a constante de momento.
5 - Iteração: repete-se os itens 3 e 4 , apresentando a rede novos exemplos de treinamento até que o critério de
parada seja satisfeito.
Observação: a ordem de apresentação dos exemplos de treinamento deve ser aleatória, de época para época. Os
parâmetros de momento e a taxa de aprendizagem são ajustados com o número de iterações.
3645
XII Congresso Brasileiro de Meteorologia, Foz de Iguaçu-PR, 2002
2.3 – FILTRO DE KALMAN
O FK é frequentemente usado em problemas de estimação e controle. Desde suas primeiras aplicações no domínio
aeroespacial (Jazwinski, 1970), seu emprego vem se ampliando a outras áreas e ultimamente tem sido aplicado em
meteorologia, oceanografia e hidrologia (Daley, 1991). A seguir faz-se uma breve descrição do FK, seguindo
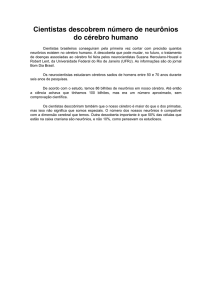
Jazwinski (1970). A Figura 1 mostra um diagrama esquemático do FK.
1. Previsão a partir do
modelo
f
w n +1 = Fn w na
Pnf+1 = Fn Pna FnT + Q n
4. Cálculo da matriz de covariância Pna+1 = [ I − G n +1 H n +1 ]Pnf+1
2. Cálculo do ganho de
kalman
Gn+1 = Pnf+1 H nT+1[Rn+1 + H n+1 Pnf+1 H nT+1 ]−
3. Cálculo da estimativa
z nf+1 = H n +1 w nf+1
w na+1 = w nf+1 + G n +1 ( z n +1 − z nf+1 )
Figura 2 – Diagrama esquemático do FK
Seja o modelo de previsão, onde o subescrito n refere-se aos instantes de tempo
w n +1 = Fn w n + µ n
(10)
onde Fn é uma descrição matemática do sistema e µ n é uma forçante estocástica (chamada ruído de modelagem
dinâmica). O modelo de observação é representado por
zn = H n wn + υn
(11)
onde υ n é o ruído e H n representa o sistema de observação. As hipóteses típicas de gaussianidade, média zero e
ortogonalidade para ruídos são adotadas. O estado w n +1 é estimada através da recursão
w na+1 = ( I − G n +1 H n +1 ) Fn c na + G n +1 z n +1
(12)
onde w na +1 é o estimador de w n +1 , G n é o ganho do filtro de Kalman, que é escolhido de modo a minimizar a
variância do erro de estimação J n +1 , onde
3646
XII Congresso Brasileiro de Meteorologia, Foz de Iguaçu-PR, 2002
J n +1 = E{( w na+1 − w n +1 ) T ( w na+1 − w n +1 )}
(13)
O Algoritmo do Filtro de Kalman é mostrado na Figura 2, onde Q n é a covariância de µ n , Pnf é a covariância do
erro de previsão, Rn é a covariância de υ n e Pna é a covariância do erro de estimação. A assimilação é feita
através da amostragem:
r (t n + ∆t ) = rn +1 ≡ z n +1 − z nf+1 = z n +1 − H n w nf+1
(14)
2.4 – DESCRIÇÃO DOS EXPERIMENTOS NUMÉRICOS
Como mencionado anteriormente, o objetivo deste artigo é investigar o sistema de assimilação proposto para
diferentes arquiteturas (RFBR e RPMC). Para cumprir estes objetivos se fez 10 experimentos, que podem ser
separados em três fases distintas, são elas: geração dos exemplos de treinamento, treinamento propriamente dito e
ativação.
Na geração dos exemplos de treinamento o modelo de Lorenz é integrado por 150000 passos de integração (0,15 s),
amostrados a cada 30 (0,003s), o que gera uma série com 5000 exemplos. Os exemplos 2001 à 4000 são utilizados
na fase de treinamento das RNs e os últimos 1000 (4001 à 5000) são reservados para a fase de ativação. O fato das
RNs serem ativadas com exemplos que não foram apresentados à rede na fase de treinamento, caracteriza a
capacidade de generalização das redes.
Conforme a Figura 1, a entrada das RNs são as matrizes normalizadas w = w ( X , Y , Z ) do sistema de Lorenz e
z = z ( X 0 , Y0 , Z 0 ) é a matriz de observação. A saída desejada (alvo das RNs), por sua vez, é a matriz normalizado
wa = wa ( X FK , YFK , Z FK ) , resultante da assimilação feita com o FK. As observações são simuladas adicinando-se
ao Modelo de Lorenz ruído aleatório de variância 2.
No algoritmo de erro-correção aplicado neste trabalho, os pesos sinápticos são iniciados com distribuição gaussina
e os padrões de treinamento são apresentados na seqüência em que foram gerados pelo modelo numérico. As redes
foram treinadas com taxa de aprendizagem constante igual 1x10-4, sem constante de momento. A diferença
fundamental entre a RPMC e a RFBR é que a função de ativação da primeira é uma tangente hiperbólica, e da
segunda é uma sigmóide.
3 – RESULTADOS E DISCUSSÃO
Nesta seção se discute os resultados dos experimentos acima descritos. A apresentação destes resultados é feita em
uma tabela que identificam os experimentos, sendo que os melhores resultados para cada classe de experimentos
são explorados também em figuras.
A RPMC com 15 neurônios não é explorada por que não convergiu para o erro de 4x10-4 durante o treinamento,
sendo que se acrescentou o experimento onde se investiga a RPMC com 40 neurônios para se ter 5 experimentos
com cada uma das RNs. O erro objetivo de 4x10-4 e a taxa de aprendizagem de 1x10-4 foram obtidos de maneira
experimental. A soma do erro médio quadrático após a fase de ativação é calculado pela seguinte equação
1 1000
SEMQ =
∑ (w a − z)
1000 i =1
2
(12)
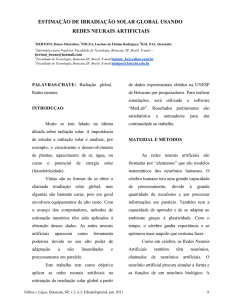
Figura 3 ilustra a importância do sistema de observação, pois com se pode notar, na ausência de método de
assimilação de dados, o modelo dinâmico (curva verde) afasta-se da observação (curva azul) à medida que o tempo
3647
XII Congresso Brasileiro de Meteorologia, Foz de Iguaçu-PR, 2002
passa. As linhas vermelha e preta representam respectivamente a assimilação pelo FK e pela RFBR com 15
neurônios para 2000 padrões de treinamento e observações inseridas a cada 0,02 s.
A s s im ila ç ã o
- O b s
a
c a d a
0 ,0 2
s
4 0
O
R
F
M
3 0
b s
F B R 5 n
K
o d e lo
2 0
X
1 0
0
-1 0
-2 0
-3 0
0 .1
0 .2
0 .3
0 .4
T e m p o
0 .5
0 .6
- s e g u n d o s
0 .7
0 .8
0 .9
1
Figura 3 – Evolução sem assimilação.
A seguir apresenta-se a tabela relativa aos experimentos cujas RNs foram treinadas com 2000 exemplos para dados
assimilados com freqüências 0,02 s com as seguintes arquiteturas: RFBR com 5, 10, 15, 20 e 40 neurônios; RPMC
com 5, 10, 20, 30 e 40 neurônios.
Tabela 2
EXP1
EXP2
EXP3
EXP4
EXP5
Rede
Erro
Erro Ativação
Épocas
Treinamento
Treinamento
5
10
15
20
30
0.0005-0.0
0.0004
0.3732-0.0
0.0004
0.0004
13.7661
22.9260
4.5001
11.4446
11.0793
32433
13602
32293
12867
14239
RPMC
5
RPMC
10
RPMC
20
RPMC
30
RPMC
40
Erro do Filtro de Kalman: 5.7633
0.0013-0.0
0.0009-0.0
0.0007-0.0
0.0004-0.0
0.0004
68.7241
17.9347
11.6016
6.3114
18.5837
32433
32363
32223
32083
19788
EXP6
EXP7
EXP8
EXP9
EXP10
RFBR
RFBR
RFBR
RFBR
RFBR
Neurônios
A tabela acima mostra que, com exceção dos EXP-2-4-5-10, os erros durante a fase de treinamento diminuem
abruptamente à zero. Mostra também que os experimentos seguem o seguinte comportamento quanto ao número de
épocas de treinamento: para 5 neurônios a RFBR é treinada com 32433 épocas, para 10 neurônios diminui para
13602 épocas e para 15 neurônios a RFBR passa a ser treinada com 32293 épocas. Para 20 e 30 neurônios a RFBR
é treinada com 12867 e 14239 épocas. As RPMC são treinadas com aproximadamente 32000 épocas de
treinamento com exceção do EXP10, que é treinada com 19788 épocas.
Observa-se que a saturação acontece com 15 neurônios para a RFBR e 30 neurônios para a RPMC, ou seja, estas
são as arquiteturas que apresentam os melhores resultados. Entende-se por melhor resultado o experimento que
apresenta menor SEMQ após a fase de ativação.
O resultado da RFBR com 5 neurônios foi 80 % melhor do que a RMPC com a mesma configuração. Ao se
comparar as redes configuradas com 10 neurônios, constata-se que a RPMC foi 21,8 % melhor, porém exigiu um
número bem menor de épocas de treinamento. Com 15 neurônios a SEMQ da RMPC divergiu, não mostrada neste
texto. Para 20 neurônios as redes tiveram praticamente o mesmo desempenho quanto a SEMQ, porém mais uma
3648
XII Congresso Brasileiro de Meteorologia, Foz de Iguaçu-PR, 2002
vez a RFBR exigiu um número bem menor de épocas de treinamento. Com 30 neurônios, melhor resultado da
RPMC, a RFBR apresentou um erro 44,66 % maior.
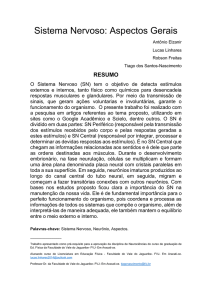
As Figuras 4-5 ilustram respectivamente os melhores resultados das RFBR (15 neurônios) e RPMC (30 neurônios)
e as Figuras 5-6 ilustram os piores resultados da RFBR (10 neurônios) e RPMC (5 neurônios).
A s s im ila ç ã o
- O b s
a
c a d a
0 ,0 2
s
O b s
R F B R 1 5 n
F K
2 0
1 0
X
0
-1 0
-2 0
-3 0
0 .1
0 .2
0 .3
0 .4
T e m p o
0 .5
0 .6
- s e g u n d o s
0 .7
0 .8
0 .9
1
Figura 4 – Rede Funções de Base Radial com 15 neurônios.
A s s im ila ç ã o
- O b s
a
c a d a
0 ,0 2
s
O b s
R P M C 3 0 n
F K
2 0
1 0
X
0
-1 0
-2 0
-3 0
0 .1
0 .2
0 .3
0 .4
T e m p o
0 .5
0 .6
- s e g u n d o s
0 .7
0 .8
0 .9
1
Figura 5 –Rede Perceptron de Múltiplas Camadas com 30 neurônios.
Observa-se nas figuras acima, que a tanto a assimilação por RNs (linha preta ) como a assimilação por FK (linha
vermelha) seguem a observação (linha azul). Apenas pelas figuras não é possível identificar qual das duas redes
resultou em menor SEMQ. Porém, pela Tabela 1 conclui-se que melhor resultado da RFBR (15 neurônios, EXP3)
resulta na SEMQ 28,7 % menor do que o melhor resultado da RPMC (30 neurônios, EXP9).
3649
XII Congresso Brasileiro de Meteorologia, Foz de Iguaçu-PR, 2002
A s s im ila ç ã o
- O b s
a
c a d a
0 ,0 2
s
O b s
R F B R 1 0 n
F K
2 0
1 0
X
0
-1 0
-2 0
-3 0
0 .1
0 .2
0 .3
0 .4
T e m p o
0 .5
0 .6
- s e g u n d o s
0 .7
0 .8
0 .9
1
Figura 6 – Rede Funções de Base Radial com 10 neurônios.
A s s im ila ç ã o
- O b s
a
c a d a
0 ,0 2
s
O b s
R P M 5 n
F K
2 0
1 0
X
0
-1 0
-2 0
-3 0
0 .1
0 .2
0 .3
0 .4
T e m p o
0 .5
0 .6
- s e g u n d o s
0 .7
0 .8
0 .9
1
Figura 7 –Rede Perceptron de Múltiplas Camadas com 30 neurônios.
A Figura 6 revela que o pior resultado com a RFBR, arquitetura com 10 neurônios, falha mais em amplitude do que
em fase, ao passo que o pior resultado da RPMC, arquitetura com 5 neurônios, falha tanto em amplitude como em
fase.
4 – COMENTÁRIOS FINAIS
Conclui-se através dos experimentos apresentados, que a metodologia de assimilação de dados por RNs é uma
alternativa promissora e merece maior investigação. Para os testes feitos como o modelo conceitualmente simples
apresentado na seção 2, conclui-se que as RFBR e RPMC são algoritmos eficientes quando aplicados a problemas
de assimilação de dados. A arquitetura que resultou na assimilação de melhor qualidade segundo o critério médio
quadrático foi 15 neurônios para a RFBR e 30 neurônios para a RPMC.
Ao se treinar a redes com 2000 padrões de treinamento obteve-se bons resultados, pelo menos para o problema
apresentado e resolvido neste trabalho. Porém, num próximo trabalho pretende-se investigar o comportamento das
redes quanto treinadas com conjuntos de treinamento maiores e menores, ou seja, pretende-se procurar um número
de padrões de treinamento ótimo.
Outra investigação de interesse é quanto à freqüência com que as observações são inseridas no modelo dinâmico,
ou seja, pretende-se testar o esquema de assimilação por RNs quando as observações forem melhor e pior
amostradas temporalmente. Outra análise importante é quanto a amostragem espacial das observações, porém este
aspecto será explorado com o modelo de Água Rasa, pois exige que o modelo seja discretizado no espaço.
3650
XII Congresso Brasileiro de Meteorologia, Foz de Iguaçu-PR, 2002
Uma inovação importante nesta metodologia, deixada para trabalhos futuros, é emular o FK através das técnicas de
RNs. Para isto, pretende-se usar redes recorrentes, ou seja, redes nas quais, durante a fase de treinamento, o vetor
de saída da rede neural passa a ser utilizado como vetor de entrada na iteração posterior. Este procedimento
caracteriza a inserção de memória no sistema. Outra característica importante das RNs è o fato de que seus
algoritmos podem ser paralelizados, além de poderem ser implementados em neurocomputadores.
Referências Bibliográficas
BENNET, A. F. Inverse Methods in Physical Oceanography, Cambridge University Press, 1992.
DALEY, R. Atmospheric Data Analysis, Cambridge University Press, Cambridge, 1991.
GIROSI, F., POGGIO, T. Networks and the best approximation property. Biological Cibernetic, p.169-176. 1990.
HAYKIN, S. Redes Neurais: Princípios e prática, 2a ed, Bookman, Porto Alegre, 2001.
JAZWINSKI, A. Stochastic Processes and Filtering Theory, Academic Press, New York and London, 1970.
KOLMOGOROV, A. On Representation of Continuous Functions. Dokl. Acad. Nauk. URSS, 114. 1957.
KOVACS, Z. Redes Neurais Artificiais: Princípios e Aplicações, Collegium Cógnitio, Rio de Janeiro Brasil,
1996.
LORENZ, E. Deterministic Nonperiodic Flow. Journal of Atmospheric Sciences, p. 130/141. 1963.
NOWOSAD, A; RIOS NETO, A; CAMPOS VELHO, H. F. de. Data Assimilation Using an Adaptative
Kalman Filter and Laplace Transform. Hybrid Methods in Engineering, 2(3), 291-310. 2000a.
NOWOSAD, A; RIOS NETO, A; CAMPOS VELHO, H. F. de. Data Assimilation in Chaotic Dynamics Using
Neural Networks. In: International Conference on Nonlinear Dynamics, Chaos, Control and Their
Applications in Engineering Sciences, Campos do Jordão. 2000b. Proceedings. Rio de Janeiro: Associação
Brasileira de Ciências Mecânica, p. 212/221.
NOWOSAD, A.; CAMPOS VELHO, H. F. de; RIOS NETO, A. Neural Network as a New Approach for Data
Assimilation. In: A Meteorologia Brasileira Além do Ano 2000b: XI Congresso Brasileiro de Meteorologia,
Campos do Jordão, SP, p. 3078/3086. 2000c.
NOWOSAD, A.; CAMPOS VELHO, H. F. de; RIOS NETO, A. (2001): Neural Network as a New Approach
for Data Assimilation, Monthly Weather Review, 2001 (submetido).
3651
XII Congresso Brasileiro de Meteorologia, Foz de Iguaçu-PR, 2002
3652