Amplificadores operacionais
Analise de Amplificador operacional discreto
Método geral de realimentação
Inversor, não inversor, somador e Offset
Limitações
Termômetro (montagem diferencial)
Integrador e Diferenciador e Computação analógica
Filtros
Reguladores de tensão
Comparadores de tensão
Oscilador senoidal
PID
Amplificadores de potência
Operação em classe A, B e AB
Saída em simetria complementar
Referência: Livro Texto: Dispositivos Eletrônicos e teoria de circuitos. Autores Robert
Boylestad e Louis Nashelsky – Editora Pearson- Prentice Hall.
MaGarms 2016-1
0
0 0
0 MaGarms 2016-2
1
0
0 0
x
D
L
“alto” atrito
molas iguais
0 y
MaGarms 2016-3
2
0
x
D
triângulos semelhantes
x y
D L
L
y x
D
L
Ganho
y
0 y
D
x
entrada +
y G x
entrada ‐
L
saída
0 y
MaGarms 2016-4
3
D
L
0 D
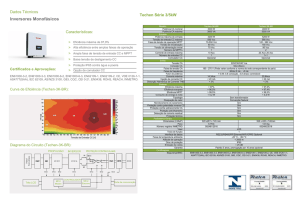
Acoplamento
L
Carga
Estágio de entrada: “Balança”
Estágio de saída:
“Driver”
0 MaGarms 2016-5
4
AO
Acoplamento
Carga
VCC
Estágio de entrada: “Balança”
vd/2
RC
RC
RL
‐
2RE
VCC
vd/2
vs
+
RE
vc
Estágio de saída:
“Driver”
0
-
+
VCC
MaGarms 2016-6
5
-
+
<VCC
0
-
+
VCC
MaGarms 2016-7
6
-
+
>VCC
MaGarms 2016-8
7
AO
RC
VCC
vd/2
RC
RL
-
2RE
VCC
vd/2
vs
+
RE
vc
AO
RC
RC
VCC
VCC
vc
vd/2
vd/2
VCC
vc
RL
VCC
VCC
2RE
VCC
RE
MaGarms 2016-9
1
Superposição: vd= 0
I/2
vc
I/2
vc
I
VCC
VCC
RE
I
Vcc vc - 0.6 Vcc vc
RE
RE
AO
RC
RC
VCC
VCC
vc
vd/2
vd/2
VCC
vc
RL
VCC
VCC
2RE
VCC
RE
MaGarms 2016-10
2
Superposição: VCC= 0; vc= 0
vd/2
vd/2
RE
Superposição: VCC= 0; vc= 0
vd/2
MaGarms 2016-11
vd/2
3
Superposição: VCC= 0; vc= 0
2re.i
re
re
i
vd/2
vd/2
- vd/2 0.6 2re.i 0.6 vd/2 0
+
vd/2 0.6 0.6 vd/2 vd
i
2re
2re
re
26mV
; para IC 5mA re 5Ω
IC
Superposição: VCC= 0; vc= 0
ib
vd/2
vd/2
i
vd
vd vd
vd
Ri
β
2βre
i
vd
ib
β
2re
Ri 2 * 200 * 5 2KΩ para β 200
MaGarms 2016-12
4
Superposição: total
I/2 - i
I/2 + i
i
I/2
I/2
I
Ic1 Ic2
Superposição: soma
das respostas
I
i
2
RC
I
i
2
RC
V vs VCC 0
VCC vc vd
vs
I
V 2RE i
2
VCC vc vd
2RE
2re
2RE
RE
VCC vc vd
re
RE
vs VCC 0
re
vs vc vd
RL
vs vd
+
RE
re
RE
re
VCC
2RE
Ro 2RE
Rth entre terminal de saída e o terra
MaGarms 2016-13
5
Equivalente Thevenin
I
i
2
I
i
2
RC
entre saída e o terra
RC
(pontos A e B).
Rth Ro 2RE
Vth vs t vc vd
vs
A
RL
B
Rth = Ro
A
+
RE
V VCC vc vd
re
RE
re
vs
Vth =
vst
VCC
2RE
RL
qualquer
B
AO: máxima excursão de saída limitada pelas fontes de
alimentação (RL=)
para o circuito analisado :
VCC 15V ; Ad 300
s
vs =300 vd
15V
RL=
excursão 2Vcc
-15V/300=-50mV
e
15V/300=50mV
-15V
se RL= Ro excursão cai pela
metade (... ou menos se houver
saturação).
MaGarms 2016-14
6
Solução: Diminuição de Ro usando par complementar
i’L
iL
vs
v’s vs
Considerando VBE 0 obtém-se:
R' L
v's
vs
v
β4 ,5 s β4 ,5 RL
i' L iL
iL
β4 ,5
Supondo 4,5 100 e com RL= 30 implica
que R’L= 100 x 30= 3K e então a tensão de
saída cai pela metade. Portanto, Ro= 30
neste caso.
AO: circuito equivalente
Em geral
vs Ac vc Ad vd
com as definições:
vd/2
-
+
vd/2
vc
MaGarms 2016-15
Ac – ganho de modo comum
Ri
Ro
Ad- ganho diferencial
vs
no circuito analisado (OA MG3Q) :
RE
vs vc vd
re
RE
Ac 1; Ad
re
7
Por que se emprega nesta análise
a tensão diferencial e
a tensão de modo comum
ao invés de v+ e vdiretamente?
Superposição: VCC 0 com v+ e v- no lugar de vc e vd sendo v+=v-=0
I/2
I/2
I
VCC
VCC
RE
I
MaGarms 2016-16
Vcc - 0.6 Vcc
RE
RE
8
Superposição: VCC= 0 com v+ e v- no lugar de vc e vd
re
v-
re
v+
A
i2
i3
i1
RE
B
VthAB = (v+ – v-)/2 ; RthAB = re/2 e em geral v+ v i3 = VthAB /(RE + re/2) 0 i1 i2 expressões “grandes”
Superposição: VCC= 0 com vc e vd.
re
re
vd/2
vd/2
A
i2
i3
i1
RE
B
VthAB = (vd/2 – vd/2)/2=0 ; RthAB = re/2 i3 = VthAB /(RE + re/2) = 0
i1 = i2 = i = vd / 2re muito simples!
Observe que este resultado independe do valor de RE!
MaGarms 2016-17
9
Além disto, o resultado final desejado (lembre da
“balança”) é a amplificação (Ad) da diferença das
tensões das entradas + e -. Portanto, é natural
considerar como entrada o sinal diferencial.
O ganho de modo comum (Ac) surge intrinsicamente como se verificou. Embora indesejado, em
geral Ac pode ser desconsiderado pois tipicamente
Ac<< Ad.
MaGarms 2016-18
10
AO: circuito equivalente não ideal
vd/2
vd/2
-
Ri
Ro
+
+
vs
vs
vd/2
vd/2
vc
vc
no circuito analisado (OA MG3Q) :
RE
vd
vs vc
re
RE
Ac 1; Ad
re
RE
RRMC
re
vs Ac vc Ad vd
Ad
RRMC
Ac
para o circuito analisado (com RE 1K5) :
Ri 2k; Ro 3K; Ac 1; Ad 300; RRMC 300
AO: circuito equivalente não ideal
vd
+
vs
Ri
Ro
vd
+
vs
vs Ac vc Ad vd; RRMC
Ad
Ac
se RRMC 1 vs Ad vd
MaGarms 2016-19
1
AO considerando máxima excursão de saída limitada pelas
fontes de alimentação
s
13V
-12V/300=-40mV
12V/300=40mV
e
-13V
para o circuito analisado :
VCC 15V ; Ad 300; RRMC 300
AO ideal : circuito equivalente para o caso de parâmetros
considerados ideais
Ri ; Ro 0
Ad ; RRMC
vs Ad vd
vd
+
vs
vd
+
vs
... e sem limitações de excursão do sinal de saída ?!
MaGarms 2016-20
2
AO 741
Ri 2 M; Ro 75; Ad 2 105 ; RRMC 90dB
AO: Métodos de Análise
1) Curto virtual
i
i
i
i' 0
-
vd=
+
0
s
+
Curto virtual
Vsmax 10V ; Ad 105 max
10V
100V 0
105
... e o caso ideal ?
max
100V
100 pA 0
Ri 1M i'max
1M
Ri
MaGarms 2016-21
3
AO: Curto virtual aplicado à montagem inversora
R1
R2
i
R1
i- 0
i
R2
vd=
e
e
+
s
s
0
+
Curto (terra) virtual
i
e s
s
R2
G
e
R1 R 2
R1
AO: Métodos de Análise
2) circuito equivalente não ideal
(implicações de Ri, Ro e Ad diferentes do caso ideal)
MaGarms 2016-22
4
AO: Modelo Equivalente aplicado à montagem inversora
AO: Modelo Equivalente aplicado à montagem inversora
MaGarms 2016-23
5
AO: Modelo Equivalente aplicado à montagem inversora
Ex2 : Ri 4KΩ
Ro 3K; Ad 250; R1 10KΩ
R2 40KΩ
Ro
1 R 2 R 2 1
R1
Ri R 2
R2
| G |
1
R1
Ad
1 40 K
40k
10 K
4K
40 K
| G |
1
10 K
250
MaGarms 2016-24
1 404KK
3,75
6
Esquema Geral de Realimentação
Malha de
realimentação
fechada
aberta
-
Esquema Geral de Realimentação - Ganho
Ama = A
-
E1= Ei + Ef
E1= 0 Ei = -Ef
Ef= AEi
E 2 AE
E f βE 2 βAE
E E1 E f E1 βAE
E2
A
E1
1 βA
(1 βA)E E1 E
A mf
E2
A
E1 1 βA
E1
1 βA
para A A mf
1
β
Fator de sacrifício
MaGarms 2016-25
1
Esquema Geral de Realimentação
Impedância de Entrada
E1= Ei + Ef
Realimentação em paralelo
E1= 0 Ei = -Ef
Ef= AEi
E1
Ii
I1
I1= Ii + If
Rima
I1= 0 Ii = -If
If= AIi
If= AIi
Ii
1
1
I
Ii βAIi
1 βA 1 βA
1
E1
R ima
R imf E1
E1
R imf
R ima
1 βA
Esquema Geral de Realimentação
Impedância de Saída
Realimentação de tensão
X1 = 0
Xi = -Xf
Xf = E2
Roma
AXi=
I2
I1= Ii + If
I1= 0 Ii = -If
Roma I2
AE2
E2
If= AIi
R oma I 2 E 2 βAE 2 R oma
R omf
E2
1 βA R omf 1 βA
I2
R oma
1 βA
MaGarms 2016-26
2
Esquema Geral de Realimentação
Interferência
Efeito da Realimentação na distorção
MaGarms 2016-27
3
Efeito da Realimentação na distorção
Efeito da Realimentação na resposta em freq
MaGarms 2016-28
4
Efeito da Realimentação na resposta em freq
AO: Montagem não inversora com analise de realimentação
R1
R1 R2
+
e
vd=
e βA
R1
ε
e
1 βA
i- 0
s
s Aε
R2
vd e
R1
s
R1 R 2
para A
A (=Ad)
e
s 1
1
e β R1/(R1 R2)
s Aε
+
Ae
s
A
1 βA
e 1 βA
-
s
s 1 R1 R2
e β
R1
MAGarms-2011
e βs
MaGarms 2016-29
5
AO: Montagem não inversora com curto virtual
+
e
+
e
0
R1
R1
i- 0
-
R2
s
R2
V
V
s
R1
s
R1 R 2
V e
G
s R1 R 2
e
R1
MAGarms-2011
MaGarms 2016-30
6
Inversor
Não inversor
Somador
Offset
AO: inversor
MaGarms 2016-31
1
AO: não inversor
AO: somador
MaGarms 2016-32
2
AO: Offset
AO: estimativa de Voffset
MaGarms 2016-33
3
AO: estimativa de Voffset
AO: estimativa de Voffset
MaGarms 2016-34
4
AO: ajuste de Offset
MaGarms 2016-35
5
Integrador e diferenciador
Integrador e diferenciador
MaGarms 2016-36
1
Equação Diferencial
d 2 y dy
4 y 4x 0
dt 2 dt
Simulação
de:
d2y
dy
4 y 4x
dt 2
dt
Isolando-se a derivada
segunda:
Cujo diagrama em blocos resulta:
-4
d2y
dt 2
4
+
x
dy
dt
y
-1
Equação Diferencial
MaGarms 2016-37
2
Equação Diferencial
MaGarms 2016-38
3
Eq. Diferencial, G(s) e |G()| M
M
K1
K2
d2y
d y x
K1
K2 y x 0
2
dt
dt
d 2 y K1 dy K 2
K dx K 2
x
y 1
M dt M
dt 2 M dt M
y
s 2Y
x
Mola massa com atrito: suspenção, galvanômetro, contator etc.
K1
K
K
K
sY 2 Y 1 sX 2 X
M
M
M
M
K1
K
s 2
Y
M
G (s) M
X s 2 K1 s K 2
M
M
2
2
K 2 K1
K
K
j 1 2
M M
M
M
G ( )
G ( )
2
2
K2
K1
j 2 K1 j K 2
2
M
M
M
M
MAGarms‐2014
FPB RC de 1ª ordem
j
G ( )
C
R
G ( )
j
C
j
RC j
1
2
1
0
; 0
0
2 02
j
1
G ( )
j
RC
0
ou G( ) 1
0
21 1/ 2
FPB de ordem 1
MAGarms‐2015
MaGarms 2016-39
1
FPB Butterworth 2ª ordem
/0
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
1,1
1,2
1,3
1,4
1,5
1,6
1,7
1,8
1,9
2
2,1
2,2
2,3
2,4
2,5
2,6
2,7
2,8
2,9
3
2
|A1|
1
0,995037
0,980581
0,957826
0,928477
0,894427
0,857493
0,819232
0,780869
0,743294
0,707107
0,672673
0,640184
0,609711
0,581238
0,5547
0,529999
0,50702
0,485643
0,465746
0,447214
0,429934
0,413803
0,398726
0,384615
0,371391
0,358979
0,347314
0,336336
0,325991
0,316228
4
|A2|
1
0,99995
0,999201
0,995974
0,987441
0,970143
0,940887
0,89799
0,842271
0,777064
0,707107
0,637046
0,570396
0,509244
0,45447
0,406138
0,363851
0,326998
0,294915
0,266955
0,242536
0,221143
0,202338
0,185746
0,171052
0,157991
0,146337
0,135902
0,126526
0,118074
0,110432
2n
| G ( ) | 1
0
8
|A2|
1
1
0,999999
0,999967
0,999672
0,998053
0,991706
0,972365
0,925382
0,836105
0,707107
0,56401
0,43438
0,330458
0,251913
0,193786
0,150842
0,118881
0,094831
0,076509
0,062378
0,051351
0,042649
0,035712
0,030127
0,025592
0,021878
0,018813
0,016267
0,014137
0,012345
1/ 2
G ( )
FPB de ordem n
02
04 4
para n 2
(1)
MAGarms‐2015
FPB Butterworth 2ª ordem
Para o G(s) abaixo resulta a resposta em frequência G():
G(s)
c
c
c
G ( )
s 2 as b
j 2 aj b b 2 ja
(2)
Cujo módulo deve ser igualado à (1):
G ( )
c
b
2 2
a 2 2
c
b (2b a )
2
2
2
4
02
04 4
Implicando para os parâmetros a, b e c as seguintes expressões:
c b 02 e a 2 2b a 2 0
(3)
Substituindo‐se (3) em (2) obtém‐se a função de transferência do FPB Butterworth
de 2ª. ordem:
G ( s)
MaGarms 2016-40
02
1
s 2 0 s 02 02 s 2 2 01s 1
(4)
2
MAGarms‐2015
2
FPB Butterworth 2ª ‐ Equação diferencial
Adotando‐se para o valor de RC do integrador o valor:
RC 1.591103 107 1.59110 4 seg 1ut
Este valor pode ser usado para definir a frequência de corte do filtro:
vs
vedt vs RC
ve d t RC vs - ve d
p / t T 2 ou T 2RC f 0
com t
RC
1
1
T 2RC
Com o valor adotado de RC resulta:
f0
1
1
10 4
KHz 1KHz
T 2RC 6.28 1.591
G (s)
Pode‐se ainda escrever:
0 2f 0
2
1
1 rads/uT e de (4) G ( s ) 2
2RC
s 2 s 1
02
s 2 2 0 s 02
(4)
MAGarms‐2015
FPB Butterworth 2ª ‐ Equação diferencial
G ( s)
vFPA
d2y
dy
; vFPF ; vFPB y
dt
dt 2
vFPA x
1
:
s2 2 s 1
d2y
10 dy
y 2
7.07 dt
dt
1
Y (s)
d2y
dy
cqd
1.41 y x s 2Y 1.41sY s X G ( s)
X ( s ) s 2 1.41 s 1
dt
dt 2
MAGarms‐2015
MaGarms 2016-41
3
FPB Butterworth 2ª ‐ Equação diferencial
GFPB ( s)
1
s 2 1.41 s 1
G ( )
GFPF ( s )
04 4
s
s 2 1.41 s 1
G ( )
GFPA ( s )
02
02
04 4
s2
s 2 1.41 s 1
G ( )
02 2
04 4
MAGarms‐2015
FPB Butterworth 2ª ‐ Equação diferencial
G(s)
1
s 2 1.41 s 1
RC 10 4 15.91 10 9 1.591 10 4 seg
t/RC ; p / t T 2 ou T 2RC
f
1
1
10 4
KHz 1KHz
T 2RC 6.28 1.591
MAGarms‐2015
MaGarms 2016-42
4
FPB Butterworth 2ª ‐ Sallen‐Key
Tensões relativas ao terra
Y3
i2
Y1
vi
vx
Y2
vo
+
i3
i3
i1
‐
Y4
vo
i1 i2 i3
Obtenção de vi – vx, a partir desta expressão das correntes:
Y1 (vi vx ) Y3 (vx vo ) Y2 (vx vo )
Y1 (vi vx ) (Y2 Y3 )(vx vo )
(5)
Y
Y
v x 1 4 vo v x vo 4 vo
Y2
Y2
(6,7)
Obtenção de vx e de vx ‐ vo:
(v x vo )Y2 voY4 vxY2 (Y4 Y2 )vo
Y
Y
Y1vi Y1 1 4 vo (Y2 Y3 ) 4 vo
Y2
Y2
Substituindo‐se (6) e (7) em (5):
(8)
MAGarms‐2015
FPB Butterworth 2ª ‐ Sallen‐Key
Tensões relativas ao terra
Y
Y
Y1vi Y1 1 4 vo (Y2 Y3 ) 4 vo (8)
Y2
Y2
Y3
i2
Y1
vi
i1
vx
Y2
vo
+
i3
i3
‐
Y4
vo
Obtenção de vi em função de vo a partir de (8):
Y1vi Y4 vo
Y3Y4
YY
vo Y1vo 1 4 vo
Y2
Y2
(9)
Obtenção de vo/vi a partir de (9):
vo
Y1
vi Y Y Y3 Y1 Y4
4
1
Y2
vo
Y1Y2
vi Y1 Y2 Y3 Y4 Y1Y2
(10)
MAGarms‐2015
MaGarms 2016-43
5
FPB Butterworth 2ª ‐ Sallen‐Key
Tensões relativas ao terra
Y3
C
i2
vx
Y1
vi
Y2
+
Fazendo‐se
Y1 Y2
+
vo
‐
Y4
R
vi
i3
i3
i1
R
vo
vo
‐
kC
v
Y1Y2
1
; Y3 sC ; Y4 ksC em (10) : o
R
vi Y1 Y2 Y3 Y4 Y1Y2
vo
1/ R2
1
1
G ( s)
vi
2 / R sC ksC 1 / R 2
2 R sR 2C ksC 1 ( kR 2C 2 ) s 2 (2kRC ) s 1
G(s)
1
(kR 2C 2 ) s 2 (2kRC ) s 1
(11)
MAGarms‐2015
FPB Butterworth 2ª‐ Sallen‐Key
G (s)
Igualando‐se (11) e (4):
1
02 s 2 2 01s 1
(4)
1
1
(kR 2C 2 ) s 2 (2kRC ) s 1 02 s 2 2 01s 1
Resulta para k e 0:
2
02
2
1
1
1
2
1
e 0
02
ou k 0.5 e 0
kR 2C 2
2 2kRC
RC
kR 2 C 2 2k 2 R 2 C 2
2kRC
(12)
C
R
R
+
vi
C/2
‐
vo
MAGarms‐2015
MaGarms 2016-44
6
FPB Butterworth 2ª ‐ Sallen‐Key
C
2
0 R
2
100 2
nF 22.4nF
2 10310 4
2
MAGarms‐2015
MFB
Filtros – 2ª ordem
(2)
(2), (3), (4) em (1)
MaGarms 2016-45
7
Filtros – 2ª ordem
Filtros – 2ª ordem
MaGarms 2016-46
8
Filtros – 2ª ordem
Filtros – 2ª ordem
MaGarms 2016-47
9
FiltrosFiltros – nª ordem
Aproximação Butterworth
Filtros – nª ordem
Aproximação Chebychev
MaGarms 2016-48
10
Comparador “simples”
Comparador com histerese (Schmitt Trigger - ST)
Multivibrador Astável com ST
MA Garms-2014
Comparadores
MaGarms 2016-49
1
Comparador simples
Comparador simples
MaGarms 2016-50
2
Comparador com histerese
Comparador com histerese
MaGarms 2016-51
3
Comparador com histerese
Comparador com histerese
MaGarms 2016-52
4
Comparador com histerese
Multivibrador Astável com ST
MaGarms 2016-53
5
Multivibrador Astável com ST
MaGarms 2016-54
6
Osciladores
e
s
‐|G|
+
+
r
s | G | ; e r e s
s | G | e s s 1 | G | | G | e
s
|G|
e 1 | G |
Condição de instabilidade de Barkhausen:
| G | 1 ou de modo mais amplo : | G |
1
com real e negativo
MAGarms‐2015
Osciladores – Rede RC defasadora ()
Ve=s
V2
R
I1
C
V1
R
I2
Vs=r
I3
C
C
I’2
I’1
tensões com relação ao terra
Note que: Vs jXCI 3
Define‐se: x R XC R 2fC
jXCI '2 R jXC I 3
Cálculo de I2:
R
I '2
R jXC
I3
jXC
ou I '2 1 jx I 3
e I 2 I '2 I 3 1 jx I 3 I 3 2 jx I 3
Cálculo de V2:
V2 RI 2 jXCI '2
R2 jx I 3
jXC
jXC 1 jx I 3
jXC
V2 jx2 jx 1 jx jXCI 3 2 xj x 2 1 jx jXCI 3 1 x 2 3xj Vs
V2 1 x 2 3xj Vs
MaGarms 2016-55
MAGarms‐2015
1
Osciladores – Rede RC defasadora ()
tensões com relação ao terra
Ve=s
V2
R
I1
R
V1
I2
C
C
R
Vs=r
I3
C
I’2
I’1
2
2
Cálculo de I1: I '1 jXC 1 x j 3x I 3
e I 2 2 jx I 3
V
I1 I '1 I 3 3 x 2 j 4 x I 3
e portanto:
Cálculo de Ve:
Vs jXCI 3
jXC
Ve RI1 V2 R 3 x 2 j 4 x
I 3 1 x 2 j 3x Vs
jXC
R 3 x2 j4x
2
jXCI 3 1 x j3 x Vs
XC
j
xR
Ve x 3 x 2 j 4 x 1 x 2 3 xj Vs
MAGarms‐2015
XC
Osciladores – Rede RC defasadora ()
tensões com relação ao terra
R
V2
R
Ve=s
I1
C
I2
C
C
Ve
3 xj jx 3 4 x 2 1 x 2 j 3 x 1 5 x 2 j 6 x x 3
Vs
Vs
1
Ve 1 5 x 2 j 6 x x 3
Parte imaginaria = 0:
| G |
1
6 x x 3 0 ou x R 2 fC 6
Pela condição de Barkhausen:
MaGarms 2016-56
I3
Ve x 3 x 2 j 4 x 1 x 2 3 xj Vs
Cálculo de Ve/Vs:
Finalmente:
Vs=r
I’2
I’1
Anterior:
R
V1
| G | 29
1
1- 5 6
2
1
29
MAGarms‐2015
2
Osciladores – Rede RC defasadora ()
f
6
6
7800Hz
2 RC 2 104 5 109
| G |
1 1500 103
1,035
29 50 103
MAGarms‐2015
Osciladores – Rede RC defasadora ()
transitório
MAGarms‐2015
MaGarms 2016-57
3
Osciladores – Rede RC defasadora ()
Note a saturação
f
1
7600Hz
132 106
MAGarms‐2015
Osciladores – Colpits
Z jXC 2 // jXL1 jXC1
jXC 2 jXC1 jXL1
jXC 2 jXC 2 jXL1
Na ressonância |Z|:
jXC1 jXC 2 jXL1 0
1
f0
jXC1
jXC1 jXC 2 jXC1
1
2 10
1
2.4s 2.4106
XC1
C2
XC2
C1
1
0C1 0C2
0 L1 f 0
jXC1
e
jXL1 jXC1
G
1
1
2 L1C1sC 2
jXC1 jXC 2 jXL1
C1
C2
103
460Hz
2 0.12
MAGarms‐2015
MaGarms 2016-58
4
Osciladores – Colpits
transitório
MAGarms‐2015
Osciladores – Colpits
Note a saturação
f
MaGarms 2016-59
1
456 Hz
2.2 103
MAGarms‐2015
5
Osciladores – Hartley
f0
1
2 C1L1 L2
L1
L2
G
1
L2
L1
MAGarms‐2015
Osciladores – Hartley
f0
fo
1
2 0.3 108 220 50106
1
179 KHz
5.6 106
10
MHz 177 KHz
56.52
(teórico)
(medido)
MAGarms‐2015
MaGarms 2016-60
6
Regulador de tensão
iBi
iL
i + I/2
Rz
i + I/2
i
I/2
I
MaGarms 2016-61
1
Regulador de tensão
-
Regulador de tensão
i
Vz Vs
2re
assumindo - se que 2 re i 0
Vs Vz I R (Vz 0.6) / R (fixa e ajustada para I/ 2)
iB i sendo iB
2re
Vs
RL
Vs
IL
V
S
β βRL
Vz Vs
Vz
2
1 re
Vz
RL
Esta é uma 1ª aproximação. Ver AO2 para uma análise mais geral.
Exemplo : Vs
Vz
+
5. 1
5. 1
0.99 5.1 5.05V
2
5
1
.01
1
100 10
Vs
erro
A
_
Vs (Vz Vs ) A Vs (1 A) AVz
Vz
RL 100 10
Vs
A
100
11/ A
2re
25
Vz
ou Vs
Vz
1.01
Realimentação negativa com amplificação de erro
MaGarms 2016-62
2
Regulador de tensão
Projeto para Vs=5V e IL=0,5A
I/2
Adotando-se:
I = 10 mA ,
VRC = 1,25V (para i =0)
e entrada Vin =9V
resulta:
RE
5 0.6
450
10 10 3
RC
1.25
250
5 10 3
I/2
I
R
5 0. 6
1K1
5 10 3
PQ 5 (9 5) 0,5 2W
Regulador com proteção de curto
PQ 5 9 0,6 4,8W
MaGarms 2016-63
3
Eq. Diferencial, G(s) e |G()| M
K1
M
K2
y
d2y
d y x
K1
K2 y x 0
2
dt
dt
d 2 y K1 dy K 2
K dx K 2
x
y 1
M dt M
dt 2 M dt M
s 2Y
x
Mola massa com atrito: suspenção, galvanômetro, contator etc.
K1
K
K
K
sY 2 Y 1 sX 2 X
M
M
M
M
K1
K
s 2
Y
M
G (s) M
X s 2 K1 s K 2
M
M
2
2
K 2 K1
K
K
j 1 2
M M
M
M
G ( )
G ( )
2
2
K2
K1
j 2 K1 j K 2
2
M
M
M
M
MAGarms‐2014
PID – Nichols – controle
(ref.: Engenharia de controle moderno ‐ Ogata 2ª ed.‐ PHB editora)
Proporcional
Kp
Integral
Kp
Ti s
E(t)
+
‐
Derivativo
K pTd s
+
+
Planta
S(t)
+
1
Td s E ( s )
K p 1
T
s
i
MAGarms‐2014
MaGarms 2016-64
1
PID – Nichols – 1º método
MAGarms‐2014
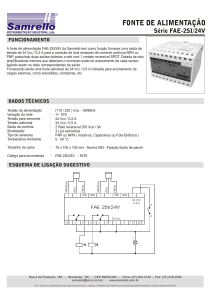
PID ‐ Nichols – 2º método
MAGarms‐2014
MaGarms 2016-65
2
PID – Nichols – planta exemplo d2y
dy
dx
0.5 4 y 4 x 0.5
dt 2
dt
dt
10KΩ 0.1μF 1ms 1s "multiplicar simulado por 1000"
MAGarms‐2014
PID – Nichols – exemplo mola massa c/ atrito (exemplo: “grande” contator): entrada/saída: degrau de corrente / deslocamento do contato móvel
MAGarms‐2014
MaGarms 2016-66
3
PID – Nichols – exemplo ‐ Planta
Função de transferência da planta (“experimental”):
d2y
dy
dx
0.5 4 y 4 x 0.5
dt 2
dt
dt
s 2Y ( s ) 0.5sY ( s ) 4Y ( s ) 0.5sX ( s ) 4 X ( s )
K1
K
s 2
Y
M
M
G p (s)
X s 2 K1 s K 2
M
M
0.5s 4
Y (s)
G p (s)
X ( s ) s 2 0.5s 4
MAGarms‐2014
PID – Nichols – exemplo ‐ controle
G (s)
Proporcional
Kp
Integral
Kp
Ti s
E(t)
+
‐
Derivativo
K pTd s
G p (s)
K1
K
s 2
Y
M
M
X s 2 K1 s K 2
M
M
0.5s 4
s 2 0.5s 4
+
+
Planta
S(t)
+
1
Td s E ( s )
K p 1
T
s
i
MAGarms‐2014
MaGarms 2016-67
4
PID – Nichols exemplo
MAGarms‐2014
PID – Nichols exemplo
(obtenção experimental de Kcr e de Pcr) MAGarms‐2014
MaGarms 2016-68
5
PID – Nichols‐ exemplo
(obtenção experimental de Kcr e de Pcr) Kcr= R4/R14=10
Pcr = 2,313s
10KΩ 0.1μF 1ms 1s "multiplicar simulado por 1000"
MAGarms‐2014
PID ‐ Nichols‐ exemplo
Kcr= 10
Pcr = 2,31seg
Usando 2º método de Nichols :
Kp= 0.6 Kcr = 6
Ti= 0.5 Pcr 1,2 seg Kp/Ti= 5 seg‐1
Td= 0.125Pcr 0.29 seg Kp Td 1,8 seg MAGarms‐2014
MaGarms 2016-69
6
PID – Nichols exemplo
(ajuste por Nichols) MAGarms‐2014
PID ‐ Nichols‐ exemplo
MAGarms‐2014
MaGarms 2016-70
7
Sem PID
MAGarms‐2014
PID – Alterando‐se KpTi para 1,2 s
MAGarms‐2014
MaGarms 2016-71
8
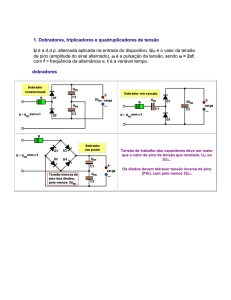
PID – Alterando‐se KpTi para 1,2 s
I: 200mV/div
D: 5V/div
P: 200mV/div
Soma: 5V/div
MAGarms‐2014
PID – Alterando‐se KpTi para 1,2 s
I: 200mV/div
D: 5V/div
P: 200mV/div
Soma: 5V/div
MAGarms‐2014
MaGarms 2016-72
9
PID – Alterando‐se KpTi para 1,2 s
I: 200mV/div
D: 5V/div
P: 200mV/div
y: 5V/div
MAGarms‐2014
PID – Alterando‐se KpTi para 1,2 s
I: 200mV/div
D: 5V/div
P: 200mV/div
y: 5V/div
MAGarms‐2014
MaGarms 2016-73
10
PID ‐ final
MAGarms‐2014
PID – sinal de controle
MAGarms‐2014
MaGarms 2016-74
11
PID – sinal de controle
‐ entrada planta
‐ saída planta
MAGarms‐2014
Malha aberta
‐ entrada planta
‐ saída planta
MAGarms‐2014
MaGarms 2016-75
12
Malha aberta c/ ajuste de atrito
G p ( s)
de G p ( s )
K1
K
s 2
Y
M
M
X s 2 K1 s K 2
M
M
0. 5 s 4
2s 4
para G p ( s ) 2
s 2 0. 5 s 4
s 2s 4
MAGarms‐2014
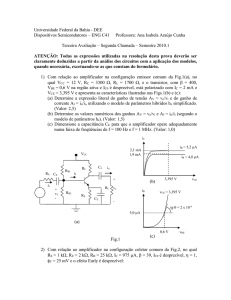
PID – efeitos do controle derivativo
Diminuindo‐se R10 vinte vezes nota‐se o aumento do ruído de alta frequência: na montagem diferenciadora e com R10 = 0 o ganho tende a infinito para altas frequências.
MaGarms 2016-76
MAGarms‐2014
13
PID – outro exemplo
(obtenção experimental de Kcr e de Pcr) G p (s)
1
ss 1s 5
MAGarms‐2014
PID – outro exemplo
(obtenção experimental de Kcr e de Pcr) 20KΩ 0.5 μF 10ms 1s "multiplicar simulado por 100"
MaGarms 2016-77
Kcr= 30
Pcr = 2,82s
MAGarms‐2014
14
PID ‐ outro exemplo
G p (s)
1
ss 1s 5
MAGarms‐2014
PID ‐ 1º resultado
Por que a saída está com sobressinal alto?
MAGarms‐2014
MaGarms 2016-78
15
PID ‐ 1º resultado
Porque está ocorrendo saturação do controle derivativo.
MAGarms‐2014
PID – 2º resultado
Aumentando‐se R20 reduz‐se o pico do sinal derivativo. Observe que quanto maior o R20 mais o sinal derivativo se afasta do “ideal”.
MAGarms‐2014
MaGarms 2016-79
16
PID ‐ 2º resultado
Para este valor de R20 (20%) o sinal de saída mostrou‐se adequado e sem saturação do sinal derivativo (neste caso “impuro” ,i.e., com R20 0).
MAGarms‐2014
MaGarms 2016-80
17
Exercícios 1
1) Foram realizados ensaios num dado Amplificador Operacional. Pede-se:
(a) Calcule Ac a partir das seguintes medidas: v + = v - = 2 mV ⇒ vs = 3mV.
(b) Calcule Ad a partir das seguintes medidas: v + = 1.0 mV, v + = -1.0 mV ⇒ vs = 12V.
(c) Desenhe o modelo interno deste AO sabendo-se que Ri= 1MΩ e Ro=50Ω.
2) Determine a tensão de saída de um AO para tensões de entrada de V+ = 150 µV, V- = 140 µV. O
amplificador tem um ganho diferencial de Ad = 4000 e o valor de RRMC é:
(a) 100.
(b) 105
3) Se o circuito amplificador inversor com AO tem R1 = 100 KΩ e R2 = 500 KΩ, qual é sua tensão
de saída para uma entrada de V1 = 2V?
4) Calcule a tensão de saída de um amplificador não-inversor
R1 = 500 KΩ e R1 =100 KΩ
para valores de V1 = 2V,
5) Calcule a tensão de desequilíbrio de saída do circuito da Figura abaixo devido a um Vio
especificado no valor de 1,2 mV. Calcule também a tensão de desequilíbrio devido a um Iio
especificado no valor de 100 nA.
6) Calcule a tensão de desequilíbrio total para o circuito da Figura seguinte para um AO com
valores especificados da tensão de desequilíbrio de entrada: Vio = 4 mV e da corrente de
desequilíbrio de entrada: Iio = 150 nA.
MaGarms 2016-81
7) Determine a frequência de corte de um AO com valores especificados de B1 = 1 MHz e
Ad= 200 V/mV.
8) Para o sinal e circuito da Figura abaixo, determine a máxima frequência que pode ser usada.
(a Taxa de subida do AO é de TS = 0,5 V/µs.)
9) Considere um sinal de entrada de 2V DC sobre um amplificador inversor (que utiliza um
Amplificador Operacional ideal). Sabe-se que o resistor na entrada inversora é igual a 10KΩ, que o
resistor de realimentação é igual a 40 KΩ e que o resistor de carga (ligado entre a saída do
amplificador operacional e o terra) é de RL= 2KΩ. Pede-se:
(a) Desenhe o circuito do amplificador inversor proposto.
(b) Determine a tensão de saída gerada pelo amplificador operacional utilizado.
(c) Determine a corrente na saída gerada pelo amplificador operacional utilizado.
(d) Calcule a potencia dissipada pelo resistor de carga RL.
10) Deduza a expressão entre a tensão de saída e as tensões de entrada para a montagem diferencial
que utiliza um AO.
11) Obtenha (explique como) a equação da tensão de saída do circuito da Figura abaixo em função
das tensões Vx (tensão sobre o sensor) e Vr (tensão de referencia). Defina os valores de R1 e R2
sendo que o diodo sensor utilizado atua entre as seguintes condições: 100°C ≡ Vx= 720 mV; 50°C ≡
Vx= 670 mV e 0°C ≡Vx= 620 mV. A saída deste circuito é conectada a um conversor AD cuja
faixa de tensão de entrada admissível encontra-se entre 0 e 10V. Esta conexão é adequada?
d2y
dy
+ 7 − 3y = 2x
2
dt
12) Considere a seguinte equação diferencial: dt
. Para sua simulação,
apresente: (a) Diagrama em blocos. (b) Circuito eletrônico com Amplificadores Operacionais
considerados ideais. Observação: ajuste a constante de integração Ki=RC para o valor de 10ms.
MaGarms 2016-82
Exercícios 2
1) Considere um amplificador classe B com transistores TBJ em saída complementar. Sendo sua carga um
alto-falante de de 16 Ω e sua alimentação de ± 16V. Esboçar o circuito, obter a potencia de saída máxima
que a carga deve suportar, obter a potencia média da fonte para o pior caso e definir o valor da resistência
térmica máxima do dissipador a ser utilizado em cada transistor. Dados: TA = 40oC;R JC = 1,5oC/W;
R CD = 0,6oC/W e T Jmax = 200oC.
2,3) Obter Vs dos circuitos das Figuras 1 e 2.
Ve = 1V e
Ve= 3V
Ve = 6V
Figuras 1 e 2
4) (a) Considere um AO com duas entradas X e Y. A entrada X é do tipo inversor, sendo os resistores de
entrada e de realimentação iguais. A entrada Y corresponde ao terminal + do AO. Desenhar o circuito e
obter a saída S em função das entradas X e Y. (b) Obter |vs|/|ve|, Ri e Ro do circuito da Figura 3
Figura 3
5) No circuito da Figura 4 obter as impedâncias de cada entrada e de cada saída. Obter também S1 e S2 em
função de A e B (supor entradas e saídas “casadas”).
MaGarms 2016-83
Figura 4
6) Considere o circuito da Figura 5. Calcule todas as correntes indicadas, a tensão na saída do operacional e
a tensão na carga para (a) Ve= 2.5V e (b) Ve= -2.5V.
R1 = 1KΩ; R2= 2KΩ;
β = 100;
RL = 50Ω; Vcc= 15V
Figura 5
7) Considere o circuito da Figura 6. Calcule todas as correntes indicadas, a tensão na saída do operacional, a
tensão VCE e a tensão Vs. Dados: R=1000Ω; β=100; RL=100Ω; Ve=10V e Vcc=22V.
Figura 6
MaGarms 2016-84
8) Estime VL no circuito da Figura 7 considerando inicialmente Ad finito e depois fazendo Ad→∝ na
expressão obtida. Obtenha as correntes indicadas e a potencia no transistor Q1 para uma carga de 5Ω. Qual é
a função deste circuito?
Figura 7
9) (a) Desenhe e (b) projete o circuito de controle usando amplificador(es) operacional(ais) para controlar a
o volume de água do recipiente da Figura 8. A carga deve iniciar para o volume mínimo de 50% e terminar
quando o volume ultrapassar o máximo de 90%.
Figura 8
10) Um voltímetro com duas escalas pode ser construído empregando-se um mostrador com bobina móvel,
um amplificador operacional e dois resistores, como apresentado na Figura 9. O mostrador de bobina móvel
é modelado por um indutor de 1 µH em série com um resistor de 10Ω e atinge o fundo de escala com uma
corrente de 10µA. (i) Os valores de R1 e R2 são, respectivamente, iguais a 1 MΩ e 100 kΩ PORQUE (ii)
A resistência interna do mostrador é desprezível, quando comparada com os valores de R1 e R2.
Analisando-se essas informações, (i) e (ii), conclui-se que:
(A) as duas afirmações são verdadeiras e a segunda justifica a primeira.
(B) as duas afirmações são verdadeiras e a segunda não justifica a primeira.
(C) a primeira afirmação é verdadeira e a segunda é falsa.
(D) a primeira afirmação é falsa e a segunda é verdadeira.
(E) as duas afirmações são falsas.
MaGarms 2016-85
Figura 9
Extra) A Figura 10 apresenta um amplificador operacional de ganho A e sua curva de transferência de
tensão.
Figura 10
Com base na figura, tem-se:
O emprego do amplificador operacional exige que:
PORQUE
O dispositivo opera na região linear quando:
Analisando estas afirmações, conclui-se que:
(A) as duas afirmações são verdadeiras e a segunda justifica a primeira.
(B) as duas afirmações são verdadeiras e a segunda não justifica a primeira.
(C) a primeira afirmação é verdadeira e a segunda é falsa.
(D) a primeira afirmação é falsa e a segunda é verdadeira.
(E) as duas afirmações são falsas.
MaGarms 2016-86