REDES NEURAIS APLICADA A CINEMÁTICA DA CADEIRA DE RODAS
Alan Cardoso Barbosa (Bolsista Fundação Araucária/ Inclusão Social)
Marcio Roberto Covacic
Ruberlei Gaino, e-mail: [email protected]
Universidade Estadual de Londrina/ Departamento de Engenharia Elétrica/
CTU
Área e subárea do conhecimento: Engenharia Elétrica/ Automação Industrial
e Controle.
Palavras-chave: Controle PID; Redes Neurais; simulações.
Resumo
O desenvolvimento de novas tecnologias que possam tornar melhor a vida de
pessoas com algum tipo de deficiência é um dos temas de estudo da
engenharia, mais especificamente da Engenharia Biomédica. O foco deste
trabalho está no estudo de técnicas de controle Proporcional-Integral-Derivativo
(PID) e também na aplicação de conceitos de Redes Neurais Artificiais para
controle da cinemática para movimentação de uma cadeira de rodas
automatizada. Para tanto foram utilizados os softwares Matlab/Simulink para
desenvolvimento do controle PID, para implementação, treinamento da Rede
Neural e realização das simulações. Os resultados obtidos com o uso da Rede
mostraram que o sistema é estável e apresenta saída conforme descrito pelo
modelo cinemático da cadeira.
Introdução e objetivo
A construção de equipamentos e dispositivos que melhorem a mobilidade de
pessoas que possuem algum tipo de restrição em seus movimentos é uma das
abordagens da engenharia. Um exemplo disso está na cadeira de rodas
acionada por sopro e sucção desenvolvida no Laboratório de Controle
Avançado, Robótica e Engenharia Biomédica CTU/DEEL. (Gentilho Jr, et
al.,2014)
Para modelagem cinemática da cadeira foram consideradas as
velocidades linear (𝑉) e angular Ω do dispositivo, a distância 𝐷 entre as rodas e
o raio das rodas traseiras da cadeira (𝑅). Através de tal modelo, as velocidades
angulares da roda direita (𝜔𝑙 ) e da roda esquerda (𝜔𝑟 ) podem ser relacionadas
com 𝑉 e Ω da seguinte forma:
1
1
𝜔𝑟
[ 𝜔 ] = [𝑅
1
𝑙
𝑅
𝐷
𝑅
2𝑅 ] . [𝑉 ] 𝑜𝑢 [𝑉 ] = [ 2
𝐷
𝑅
𝛺
𝛺
−
2𝑅
𝐷
𝑅
2 ] . [𝜔𝑟 ]
𝑅 𝜔𝑙
−
𝐷
(1)
Para controle do dispositivo foi adotado um controlador ProporcionalIntegral-Derivativo (PID), que é regido pela equação (2), conforme (TEIXEIRA,
Assuncao e covacic et al., 2007):
𝑡
𝑑𝑒(𝑡)
𝑢(𝑡) = 𝐾𝑝 . 𝑒(𝑡) + 𝐾𝑖 ∫ 𝑒(𝑡)𝑑𝑡 + 𝐾𝑑
(2)
𝑑𝑡
0
onde 𝐾𝑝 ,𝐾𝑖 ,𝐾𝑑 correspondem aos ganhos proporcional, integral e derivativo,
respectivamente.
Ainda como técnica de controle é possível a aplicação de Redes
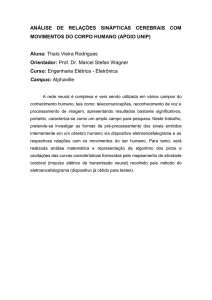
Neurais Artificiais. A unidade mínima que compõe uma Rede Neural é
denominada neurônio e pode ser vista na Figura 1.
Figura 1: Modelo matemático de um neurônio.
Fonte: (Haykin, 1999)
onde [𝑥1 , 𝑥2 , … 𝑥𝑚 ] são as entradas da rede, [𝑤𝑘1 , 𝑤𝑘2 , 𝑤𝑘𝑚 ] são os pesos
sinápticos, 𝜑(∙) a função de ativação e 𝑦𝑘 corresponde à saída da rede.
Em termos matemáticos esse neurônio pode ser descrito por:
𝑚
𝑢𝑘 = ∑ 𝑤𝑘𝑗 𝑥𝑗
𝑦𝑘 = 𝜑(𝑢𝑘 + 𝑏𝑘 )
(3)
𝑗
Tal técnica é promissora devido a suas características de nãolinearidade, adaptação, capacidade de generalização, aprendizagem, dentre
outras.
Para construção da Rede Neural para modelagem cinemática da cadeira
foi utilizado um algoritmo de treinamento backpropagation, uma função de
2
aprendizagem do tipo gradiente descendente e função de desempenho sendo
do tipo MSE (Mean Square Error ou Erro Quadrático Médio).
Procedimentos metodológicos
Neste trabalho foi realizado um estudo de controladores PID, para controle dos
motores, controle cinemático da cadeira de rodas em malha fechada, com
tratamento de Redes Neurais Artificiais.
Para realização de simulações foi feito uso do software Matlab/Simulink
2011a e do Neural Network Toolbox também do software Matlab. Os dados
para treinamento da rede foram obtidos através do modelo cinemático
construído no Simulink e que posteriormente foram passados para o Neural
Network Toolbox para então implementação da Rede Neural.
Resultados e discussão
Para a realização das simulações foram considerados dois casos:
primeiramente com 𝑉 variando entre 0,9 e 1,1 e Ω igual à zero e no segundo
caso 𝑉 sendo zero e Ω variando parametricamente entre 0,9 e 1,1.
Para o primeiro caso foi desenvolvida e Treinada uma Rede Neural que
posteriormente foi posta no sistema em malha fechada em ambiente Simulink.
Para teste do comportamento do sistema foi tomada sua resposta a uma
entrada 𝑉 sendo uma fução degrau unitário e Ω = 0. A resposta das saídas do
sistema 𝜔𝑙 e 𝜔𝑟 para tal entrada estão descritas na Figura 2:
Figura 2: saída de 𝜔𝑟 e 𝜔𝑙 para a primeira Rede Neural implementada
Fonte: próprio autor.
Observa-se pela figura que o Rede respondeu de forma adequada,
produzindo uma saída estável para a entrada tomada como teste.
No segundo caso foi desenvolvida uma outra Rede Neural através do
Neural Network do software Matlab. A rede foi treinada e trasferida para
ambiente Simulink para simulação e análise. Aqui para fins de teste Ω foi posta
3
como sendo uma função degrau unitário e 𝑉 permanecendo em zero. A Figura
3 contém o resultado da simulação para 𝜔𝑙 e 𝜔𝑟 devida a excitação descrita
para o sistema.
Figura 3: Saídas do sistema para Ω sendo uma função degrau e 𝑉 = 0
Fonte: próprio autor.
Novamente constata-se que 𝜔𝑙 e 𝜔𝑟 apresentam convergencia e
estabilidade em um valor dado um valor de entrada para 𝑉 e Ω, ou seja,
observa-se a validade da Rede Neural para uso no modelo cinemático do
sistema.
Conclusão
Constata-se então, através das simulações a viabilidade do uso de Redes
Neurais para realização da cinemática do sistema, visto que tal Rede apresenta
uma saída limitada estável e para uma determinada entrada limitada.
Referências
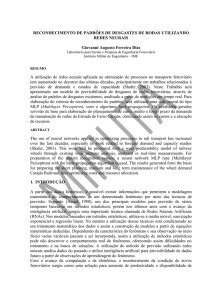
ESPINOSA, F,; LÓPES, E.; MATEOS, R.; MAZO M.; GARCÍA R.; Advanced
and Intelligent Control Techniques Applied to the Drive Control and Path
Tracking Systems on a Robotic Wheelchair. Autonomous Robots 11, 137 –
148, 2001.
GENTILHO JR, E.; COVACIC, M. R. ; BIAZETO, A. R. ; GAINO, R. .
CONTROLE IMPLEMENTADO EM DSP PARA CADEIRA DE RODAS
ACIONADA POR SOPRO E SUCÇÃO. Os profissionais da Indústria. 1ed.: ,
2014, v. 1, p. 13-. ISBN 9788567993003.
HAYKIN, Simon. Neural Network: A Comprehensive Foundation. 2. ed.
Pearson Education, 1999.
SOBRINHO, Andre Sanches F.; SUZUKI, Isaque; GERMANOVIX, Walter;
GAINO, Ruberlei. Implementação e análise do controle de uma cadeira de
rodas através de sopros e sucções.VI Simpósio Brasileiro de Automação
Inteligente, Bauru, p. 1-4, set. 2003.
4