ALIMENTADOR AUTOMÁTICO PARA CÃES
Daniel Lima de Melo Batista, Gabriel Sousa França, Guilherme Afonso Pillon de C.A. Pessoa, João
Paulo Silva de Medeiros Bezerra, José Ricardo Gomes dos Santos Júnior, Sayonara Alice Cirilo Tavares
– 4 ano do Ensino Médio1,
Daniel Lima de Melo Batista, Gabriel Sousa França, Guilherme Afonso Pillon de C.A. Pessoa, João
Paulo Silva de Medeiros Bezerra, José Ricardo Gomes dos Santos Júnior, Sayonara Alice Cirilo Tavares,
Jefferson Doolan Fernandes 1, Jefferson Doolan Fernandes 2
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DO RIO GRANDE DO NORTE.
/ COLABORADORES / TUTOR / PROFESSORES
Rua Antônia de Lima e Paiva,155 – Bairro Nova Esperança, Parnamirim.
59143-455 – Parnamirim – RN
2
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DO RIO GRANDE DO NORTE.
Rua Antônia de Lima e Paiva,155 – Bairro Nova Esperança, Parnamirim.
59143-455 – Parnamirim – RN
Resumo:No mercado atual é possível encontrar diversas
soluções para facilitar a vida do usuário. Por isso, o mercado
voltado para animais domésticos é crescente, visto que
diversas famílias que possuem animais de estimação acham
inviável ao viajar, deixar seu animal nos cuidados de vizinhos,
familiares ou
até mesmo sozinhos. Desse modo, este
alimentador tem como objetivo cuidar da alimentação do
animal de forma automática na ausência do dono ou para uma
maior praticidade no cotidiano.
Nosso objetivo neste projeto é disponibilizar para o usuário,
através dos conhecimentos adquiridos ao longo do curso de
mecatrônica um alimentador com opções tais como:
Alimentação do cão de forma automática; Definição do período
entre as refeições do animal; Quantidade de refeições diárias;
Relógio e datas ajustáveis.
Para a criação do alimentador foi necessário a aquisição de
reduções de cano, arduino(microcontrolador), componentes
eletrônicos e outros materiais encontrados no laboratório para
a fabricação de um fuso que foi fabricado a partir de um torno
mecânico junto com os professores da área solicitada.
O resultado esperado foi alcançado, o protótipo tem capacidade
de oferecer para o usuário a possibilidade de alimentar de
forma automática o cão e armazenar ração suficiente para
alimentar o animal por uma ou mais semanas, dependendo da
necessidade do animal.
Palavras Chaves: Automático, Comodidade, Mecatrônica,
Cães.
Abstract: In today's market you can find different solutions to
facilitate the user's life. Therefore, the market focused on
domestic animals is growing, since many families who own
pets find impractical to travel, and leave your pet in the charge
of neighbors, family or even alone. Thus, this feeder aims to
take care of the feeding in the absence of the owner or for
greater convenience in daily life.
Our goal in this project to make available to the user, through
the knowledge acquired during the course of mechatronics a
feeder with options such as automatically Dog feeding; Setting
the period between the animal's meals; Number of meals per
day; Clock and adjustable dates.
To create the feeder was necessary the acquisition of pipe
reductions, Arduino (microcontroller), electronic components
and other materials found in the laboratory for the manufacture
of a spindle that was made from a lathe along with teachers of
the requested area.
The expected result was achieved, the prototype is able to offer
to the user the possibility to automatically feed the dog and
store enough food to feed the animal for one or more weeks,
depending on the necessity of the animal.
Keywords: Automatic, Convenience,Mechatronics, Dogs.
1
INTRODUÇÃO
O mercado voltado para animais domésticos tem crescido
muito nos últimos anos, pois diversas famílias adotam ou
compram novos "bichinhos" todos os dias. Geralmente, essas
pessoas que possuem animais de estimação acham inviável,
quando viajam, deixarem seu animal aos cuidados de um
vizinhos, dos familiares ou sozinhos.
A ideia do alimentador automatizado surge para suprir a
obrigatoriedade da presença de uma pessoa para alimentar o
animal. Para esta finalidade surgiu a necessidade de
desenvolver um protótipo destinado a cães de médio e pequeno
porte, com o intuito de cuidar da alimentação do animal de
forma automática na ausência do dono, proporcionando uma
maior praticidade no cotidiano, através de um alimentador
automático controlado por comando eletroeletrônico, préprogramado com base nas configurações feitas pelo usuário,
Mostra Nacional de Robótica (MNR)
1
que deve informar a quantidade de refeições e a hora desejada
para elas. Isso permitirá ao dono tranquilidade na hora de
alimentar seu animal de estimação, deixando somente o
aparelho sempre ligado à tomada, para que em intervalos a
ração seja despejada no recipiente fixado no protótipo e
entregue ao cão.
No mercado atual é possível encontrar diversas soluções
para facilitar a vida do usuário. Entretanto, o custo é bastante
variável, chegando aos R$ 600,00[1], se mostrando uma
alternativa não muito atraente/viável aos olhos dos
consumidores. Este projeto visa utilizar os conhecimentos na
área da mecânica, elétrica e automação para criar um
alimentador para cães de pequeno e médio porte com baixo
custo em relação a seus concorrentes já no mercado.
2
O TRABALHO PROPOSTO
A disciplina Projeto Integrador do terceiro período do
curso de Mecatrônica tem o intuito de integrar as várias
disciplinas da matriz tecnológica relacionadas ao curso como
eletrônica, instrumentação, programação, controle, mecânica,
dentre outros. Ela reserva uma carga horária de 60 horas/aula
para a construção de um projeto, produto e/ou serviço, e seu
desenvolvimento deve utilizar os conhecimentos adquiridos nas
áreas citadas acima, sendo opcional o envolvimento com outros
componentes curriculares, como os da matriz de ensino médio,
as ciências sociais, linguísticas, exatas e da terra.
Para a escolha do projeto e de sua temática, foram
apresentadas pelos professores orientadores diversas sugestões
para trios que já estavam formados das disciplinas de
Instrumentação e de Microcontroladores, das quais os trios
deveriam eleger cinco delas em ordem de prioridade. Os trios
foram qualificados por desempenho nas aulas e tinham
prioridade no tema escolhido através desse critério. Os grupos
com seis componentes foram formados com a junção de dois
trios pela escolha do mesmo projeto. Esse trabalho foi
realizado pelos dois trios que obtiveram o tema Alimentador
Automático para Animais, especificando-o para cães, de
pequeno e médio porte, pela facilidade de aquisição de material
para construção e existência de mercado consumidor crescente,
como explicado anteriormente.
3
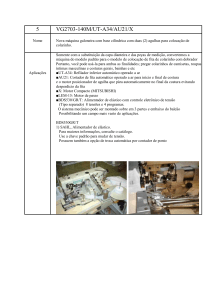
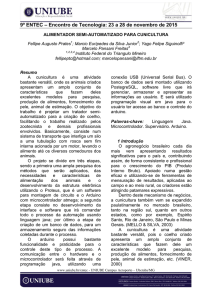
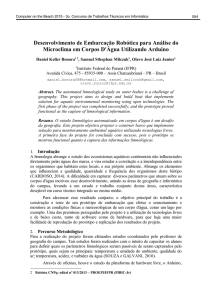
Para a personificação do protótipo, foi necessária a
aquisição de reduções de canos para servir como deposito da
ração com capacidade de 5L (litros), para melhor visualização
desenhamos esta parte no Auto Cad vide figura 1.
MATERIAIS E MÉTODOS
A seguir relacionamos os itens usados na confecção
do protótipo. Os fatos preponderantes que nortearam as
escolhas dos dispositivos foram o baixo custo de produção e a
facilidade de acesso a esses itens. A pesquisa relacionada aos
componentes, durou cerca de uma semana. Os itens listados na
tabela abaixo podem ser encontrados na maioria dos
estabelecimentos relacionados a eletrônica, podendo ser
substituídos por semelhantes de mesma funcionalidade.
QUANTIDADE
01
01
XX
02
02
01
01
01
COMPONENTE
Arduino MEGA.
Dislay LCD 16x2.
Resistores variados
TIP 41
TIP 42
LM317
Ponte retificadora 6A
Transformador 12+12 3A
Mostra Nacional de Robótica (MNR)
Depósito de ração, Figura 1.
Com o depósito pronto, precisávamos de um
mecanismo que pudesse levar a ração do depósito para a tigela,
desta forma torneamos um tarugo de tecnil para que ele se
tornasse um fuso ou seja, um eixo sem fim, suprindo assim
nossa necessidade.
Para que este eixo sem fim pudesse realizar o trabalho
proposto, foram necessárias diversas ajustagens mecânicas para
que o eixo do motor fosse acoplado ao fuso em questão, sendo
necessário o uso de mandris, calços, luvas etc. Após o devido
acoplamento do motor ao fuso, fixamos o protótipo a duas
chapas de madeira parafusadas em "L". Com isso, finalizamos
a parte mecânica necessária.
Com a parte mecânica devidamente finalizada, demos
início a eletrônica e programação, o primeiro passo foi escolher
o microcontrolador que funciona como o cérebro de nosso
projeto, por questões de facilidade de obtenção, devido ao
baixíssimo custo, e ao fácil acesso, optamos pelo uso da
plataforma arduino.
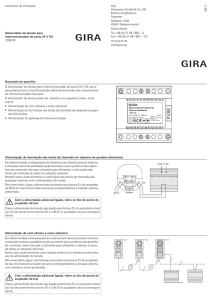
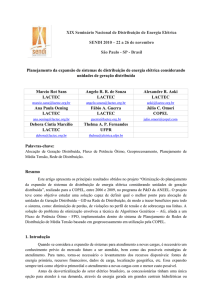
Desta forma, demos inicio ao segundo passo da parte
eletrônica, que foi projetar e executar duas placas de circuito,
uma para realizar a ativação de potência do motor, usando
quatro transistores, para efetuar esta ativação, sendo dois NPN
e dois PNP. Foi tendo em vista que o microcontrolador
escolhido para o nosso protótipo foi o arduino, que não possui
saídas que possam sustentar corrente tão alta como a que é
necessária pra fazer o motor girar, vide figura 2.
Placa de circuito Ponte H, Figura 2.
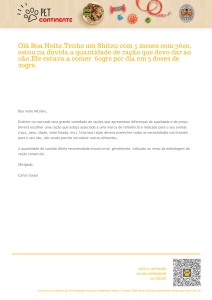
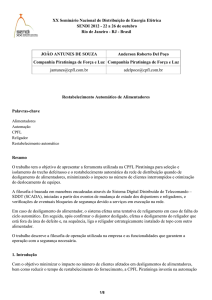
Com a primeira placa finalizada, demos inicio a
segunda placa de circuito que consiste em uma fonte de tensão
continua, na qual usamos um transformador para reduzir a
tensão alternada, de 220V para 12V, após isso usamos uma
ponte de diodos de 6A, para que a corrente fosse retificada,
depois usamos um circuito de controle de tensão, utilizando o
CI LM317 e um transistor TIP41, para garantir uma saída de
tensão mais estável, adicionamos quatro capacitores de 4700µF
vide, Figura 3. Desta forma, com uma tomada comum ligada
ao nosso circuito de fonte, podemos alimentar nosso sistema de
forma barata e eficiente.
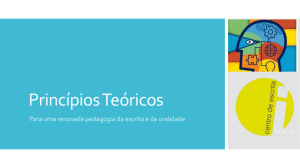
Alimentador automático para cães,Figura 4.
Placa de circuito Fonte Retificadora, Figura 3.
Já com a parte da eletrônica finalizada, nos
mobilizamos para a concluir a programação do sistema, que se
deu na IDE do arduino, Figura 4, algumas dificuldades foram
surgindo ao longo do desenvolvimento da programação, como
a integração de diversos botões ao arduino.
Assim demos inicio a fase final, a de testes. Com
algumas ajustes no código fonte do microcontrolador, foi
possível suprir a ideia inicial do projeto, dando vida ao
protótipo.
4
RESULTADOS E DISCUSSÃO
O objetivo final que o grupo visa é a confecção de um
alimentador automático, para cães de médio e pequeno porte,
eficiente com um reservatório que armazena cerca de uma
quilo e meio à dois quilos e meio de ração, dependendo do
formato da mesma, que será utilizada. Esse possui um sistema
de controle de tempo que despeja a comida em uma tigela de
acordo com o horário programado. Fornecendo, dessa forma,
ração suficiente para que o mascote não tenha uma alimentação
precária, ou até a falta de alimentação, em um período o qual o
dono tenha que se ausentar.
5
CONCLUSÕES
Com a crescente aquisição de cães e gatos como bichos de
estimação, somado ao alto custo de outros alimentadores
automáticos, que, além de mais caros, não são tão automáticos
quanto o projetado. E como o mercado de pet shop aumenta
cada vez mais, a criação de ferramentas e utensílios que
auxiliam o dono a cuidar do cachorro (ex.: o próprio
alimentador) também se torna um mercado em expansão.
Utilizando um baixo custo de produção, conseguimos
um produto que pode ser facilmente produzido industrialmente
e bastante viável comercialmente, já que donos, geralmente,
não contam gastos quando o fazem com seus bichinhos. Desta
forma, acreditamos que o projeto foi de grande valia
academicamente e pode também pode ter grande valor
comercial.
E acreditamos também que poderíamos tornar o
projeto ainda maior utilizando alguns ajustes estruturais e
adicionando alguns componentes que aumentariam o valor
comercial do projeto, engrandecendo-o.
Por fim, conseguimos um protótipo que poderia,
facilmente, alimentar um cachorro ou gato de porte médio ou
pequeno por uma ou mais semanas. Então vemos, ao fim, que
este é um projeto que pode se tornar um segmento no mercado,
já que as máquinas necessitariam de manutenção depois de
algum tempo, e que, além disso, poderia se produzir módulos
da parte eletrônica que seriam vendidos separadamente para o
conserto do alimentador, sendo assim, teríamos outra vertente
comercial para o projeto, tornando-o ainda melhor do ponto de
vista lucrativo.
REFERÊNCIAS BIBLIOGRÁFICAS
[1]ACESSÓRIOS PARA ALIMENTAÇÃO. Disponível em:
<http://www.petlove.com.br/cachorro/acessorios-paraalimentacao/preco_66.90-ateMostra Nacional de Robótica (MNR)
3
531.90?results_per_page=24&sort=0&page=1>. Acesso em 18
de março de 2015.
[2]PROTÓTIPO
DE
UM
ALIMENTADOR
AUTOMÁTICO
PARA
ANIMAIS
DE
ESTIMAÇÃO.Disponível
em:
<http://dsc.inf.furb.br/arquivos/tccs/monografias/20071nadiaochakowskivf.pdf>. Acesso em 18 de março de 2015.
Mostra Nacional de Robótica (MNR)