Centro Universitário Positivo – UnicenP
Núcleo de Ciências Exatas e Tecnológicas – NCET
Engenharia da Computação
Vanessa Freire
POLARÍMETRO DIGITAL
Curitiba
2006
Centro Universitário Positivo – UnicenP
Núcleo de Ciências Exatas e Tecnológicas – NCET
Engenharia da Computação
Vanessa Freire
POLARÍMETRO DIGITAL
Monografia apresentada à disciplina de Projeto
Final de Curso, como requisito parcial à
conclusão
do
Computação.
Curso
de
Orientador:
Engenharia
Prof.
da
Alessandro
Zimmer
Curitiba
2006
2
TERMO DE APROVAÇÃO
Vanessa Freire
Polarímetro Digital
Monografia aprovada como requisito parcial à conclusão do curso de
Engenharia da Computação do Centro Universitário Positivo, pela seguinte banca
examinadora:
Prof. Alessandro Zimmer
Prof. Dr. Adriana Cursino Thomé
Prof. Valfredo Pilla Junior
3
AGRADECIMENTOS
Ao meu orientador Alessandro Zimmer, pela idéia do projeto e pelo apoio
cientifico e metodológico na implementação desse projeto.
Ao meu amor, André Marés, pelo incentivo, paciência, dedicação e por
nunca ter permitido que eu desistisse.
Aos meus pais Marcia Manzke e Luiz Fernando Freire pelo esforço que
fizeram para que hoje eu pudesse estar concluindo este curso de graduação e por
me mostrarem, em todos os momentos de dificuldades, que sem luta não há
conquista.
Ao meu filho Guilherme pelos momentos de alegria e descontração que me
deram forças para sempre continuar.
As verdadeiras amizades conquistadas ao longo desses anos, dentre elas
Cristina Biz e Cristiane Nass.
Agradeço a todos que direta ou indiretamente ajudaram-me a chegar aqui
hoje... Muito obrigada por tudo.
4
SUMÁRIO
1. Introdução...................................................................................... 13
2. Fundamentação Teórica................................................................14
2.1 Polarimetria...........................................................................................14
2.1.1 Filtros polarizadores.................................................................17
2.2 Estudo da Luz.......................................................................................18
2.2.1 Ondas eletromagnéticas...........................................................18
2.2.2 Polarização da luz....................................................................19
2.2.2.1 Luz polarizada............................................................19
2.3 Rotação Óptica.....................................................................................21
2.3.1 Rotação especifica...................................................................22
2.3.2 Elementos de simetria molecular..............................................23
2.4 Estudo dos componentes do sistema................................................23
2.4.1 Motor de passo.........................................................................23
2.4.1.1 Parâmetros importantes..............................................24
2.4.1.2 Funcionalidades..........................................................24
2.4.1.3 Tipos de motores........................................................24
2.4.3.1 Motores de passo unipolares......................................25
2.4.3.2 Motores de passo bipolares........................................26
2.5 Microcontrolador..................................................................................28
3. Especificação Técnica...................................................................30
3.1 Especificação de Hardware.................................................................32
3.1.1 Firmware...................................................................................36
3.2 Especificação de Software..................................................................37
3.2.1 Funções....................................................................................36
4 . Projeto............................................................................................39
4.1 Projeto de Hardware..............................................................................39
4.2 Projeto de Software................................................................................40
4.2.1 Diagrama de Casos de Uso.....................................................40
4.2.2 Diagrama de Seqüência...........................................................41
5
4.2.3 Diagrama de Classe.................................................................43
5. Resultados e Validação.................................................................44
6. Conclusão.......................................................................................48
7. Estudo de Viabilidade Técnica – Econômica..............................49
8. Cronograma de Desenvolvimento................................................50
9. Referências Bibliográficas............................................................51
10. Anexos..........................................................................................52
10.1. Esquemáticos....................................................................................53
10.2. Artigo Científico................................................................................58
10.3. Manual do Usuário............................................................................64
10.4 Manual Técnico..................................................................................75
6
LISTA DE FIGURAS
Figura 2.1 – Esquema óptico de um polarímetro....................................................15
Figura 2.2 – Polarímetro analógico.........................................................................16
Figura 2.3 – Polarímetro digital...............................................................................16
Figura 2.4 – Comportamento dos filtros polarizadores...........................................17
Figura 2.5 – Gráfico do espectro visível.................................................................18
Figura 2.6 – Onda plano polarizada........................................................................19
Figura 2.7 – Onda não polarizada..........................................................................20
Figura 2.8 – Placa polarizadora..............................................................................20
Figura 2.9 – Motor de passo unipolar.....................................................................25
Figura 2.10 – Motor de passo bipolar.....................................................................27
Figura 2.11 – Esquema elétrico típico para um driver de motor de passo.............28
Figura 3.1 – Diagrama em blocos do sistema........................................................32
Figura 3.2 – Pinagem do conversor ADC0808.......................................................33
Figura 3.3 – Circuito amplificador de ganho 10......................................................34
Figura 3.4 – Motor de passo...................................................................................35
Figura 3.5 – Engrenagem para redução 10X1........................................................35
Figura 3.6 – Polarímetro digital...............................................................................36
Figura 3.7 – Diagrama de estados do motor..........................................................36
Figura 3.8 – Fluxograma do firmware.....................................................................37
Figura 3.9 – Interface gráfica do software..............................................................38
Figura 4.1 – Diagrama de casos de uso.................................................................40
Figura 4.2 – Diagrama de seqüência “Gerar Curva”...............................................41
Figura 4.3 – Diagrama de seqüência “Parar Curva”...............................................42
Figura 4.4 – Diagrama de seqüência “Calibrar Curva”...........................................42
Figura 4.5 – Diagrama de seqüência “Desligar”.....................................................42
Figura 4.6 – Diagrama de classes..........................................................................43
Figura 5.1 – Curva de calibração............................................................................44
Figura 5.2 – Glicose diluída em água.....................................................................45
Figura 5.3 – Curva da glicose................................................................................46
7
Figura 5.4 – Curva da sacarose..............................................................................47
Figura 8.1– Cronograma de desenvolvimento........................................................50
Figura 10.1– Kit didático para microcontrolador 8031............................................53
Figura 10.2 – Conversor ADC0808.........................................................................54
Figura 10.3 – Esquemático do fotodiodo................................................................55
Figura 10.4 – Esquemático do sensor de temperatura ..........................................55
Figura 10.5 – Interface do motor de passo.............................................................56
Figura 10.6 – Diagrama em blocos.........................................................................60
Figura 10.7 – Fluxograma do firmware...................................................................61
Figura 10.8 – Fluxograma do software...................................................................62
Figura 10.9 – Curva de calibração .........................................................................62
Figura 10.10 – Curva da glicose.............................................................................62
Figura 10.11– Curva da sacarose...........................................................................63
Figura 10.12 – Diagrama sistêmico do polarímetro................................................68
Figura 10.13 – Menu Arquivo..................................................................................69
Figura 10.14 – Comportamento da amostra...........................................................69
Figura 10.15 – Análise............................................................................................70
Figura 10.16 – Conectando à porta serial...............................................................70
Figura 10.17 – Conectando à rede elétrica.............................................................70
Figura 10.18 – Fechando o polarímetro..................................................................71
Figura 10.19 – Ligando o polarímetro.....................................................................71
Figura 10.20 – Curva de calibração........................................................................72
Figura 10.21 – Reset..............................................................................................73
Figura 10.22 – Curva de análise da glicose............................................................74
Figura 10.23 – Laser...............................................................................................78
Figura 10.24 – Filtros polarizadores.......................................................................79
Figura 10.25 – Funcionamento dos filtros polarizadores........................................80
Figura 10.26 – Tubo de ensaio para polarímetros..................................................80
Figura 10.27– Sensor de temperatura LM35..........................................................81
Figura 10.28 – Esquemático do sensor de temperatura LM35...............................82
Figura 10.29 – Fotodiodo OPT101.........................................................................82
8
Figura 10.30– Esquemático do fotodiodo OPT101.................................................82
Figura 10.31– Motor de passo................................................................................83
Figura 10.32 – Engrenagens..................................................................................83
Figura 10.33– Interface de Potencia para o motor de Passo.................................84
Figura 10.34 – Esquemático para o conversor ADC0808......................................85
Figura 10.35 – Kit Didático para o 8031.................................................................86
Figura 10.36 – Tela do software após a analise da glicose....................................87
Figura 10.37 – Diagrama em blocos do Polarímetro Digital...................................89
Figura 10.38 – Placa de circuito impresso do ADC0808.......................................90
Figura 10.39 – Placa de circuito impresso do 8031................................................90
Figura 10.40 – Placa de circuito impresso do sensor de temperatura LM35..........92
Figura 10.41 – Placa de circuito impresso do OPT101..........................................93
Figura 10.42 – Fluxograma do Software.................................................................94
Figura 10.43 – Fluxograma do Firmware................................................................96
9
LISTA DE TABELAS
Tabela 2.1 – Rotação óptica das substâncias........................................................23
Tabela 2.2 – Atuação de um motor de passo unipolar...........................................26
Tabela 2.3 – Atuação de um motor de passo bipolar de quatro fases...................27
Tabela 4.1 – Sinais de interface.............................................................................39
Tabela 7.1 – Estudo de viabilidade técnico-econômica..........................................49
Tabela 10.1 – Relação de componente e referencia da placa do conversor A/D...90
Tabela 10.2 – Relação de componente e referência do kit didático.......................92
Tabela 10.3 – Placa de circuito impresso do sensor de temperatura LM35...........93
Tabela 10.4 – Placa de circuito impresso do fotodiodo OPT101........................... 93
10
RESUMO
Esse trabalho descreve um sistema óptico digital onde é possível analisar o
comportamento do plano polarizado de um feixe de luz, após passar por
substâncias opticamente ativas. Tal sistema é conhecido como Polarímetro Digital.
O Polarímetro possui aplicações em variadas áreas como na industria
farmacêutica para medir a rotação óptica em medicamentos ou na refinaria de
açúcar para inspecionar a concentração da solução de açúcar no processo
industrial. Também é usado na medicina para medir o teor de açúcar e de proteína
na urina, alem de grande aplicação na industria alimentícia onde se inspeciona o
teor de açúcar e teor de amido de temperos de comidas. No campo de pesquisa é
utilizado no desenvolvimento de novos produtos e em pesquisas relacionadas à
astrofísica. A tecnologia digital aplicada no aparelho visa maior facilidade de
operação.
O aparelho basicamente é formado por um emissor de luz monocromática ,
um filtro polarizador fixo, um tubo contendo a amostra e um filtro polarizador para
análise, que ao ser automaticamente rotacionado registra o ângulo em graus do
plano polarizado da luz. A análise é feita via software onde é possível visualizar
gráficos de calibração e comportamento do sistema.
11
ABSTRACT
This work describes a digital optic system where it is possible to analyze the
behavior of a light beam polarized plan, after passing through for an opticaly active
substance. Such system is known as Digital Polarimeter.
The Polarimeter has applications in several areas as in the pharmaceutical
industry to measure the optical rotation in medicines, in the sugar refinery to
inspect the concentration of the sugar solution in the industrial process. It is also
used in medicine to measure the sugar and protein grade in urine, and a great
application in the food industry where it inspects the sugar and starch grades of
food spices. In the research field it is used during the development of new products
and in research related to astrophysics. The digital technology used aims a greater
precision in the result analysis and greater ease of use operation.
The device basically is formed by a monochromatic light emitter, a fixed
polarizing filter, a pipe containing the substance sample and a polarizing filter for
analysis, that rotates automatically registering the angle in degrees of the light’s
polarized plan. The whole process is analysed by a software where it is possible to
visualize the calibration graphics and the behavior of the system.
12
1. Introdução
A natureza transversal das oscilações eletromagnéticas resulta na
existência de estados de polarização específicos para o campo eletromagnético. A
forma exata que a luz irá apresentar, ou seja, seu estado de polarização, e como é
possível observar, produzir, alterar e utilizar estes estados, é uma parte essencial
da pesquisa em diversos campos da ótica.
Em alguns dispositivos, a polarização da luz desempenha um papel
importante. Como exemplo podemos citar a analise do o grau de rotação
molecular de substancias utilizando um polarímetro, o qual se baseia em estudos
sobre polarização da luz para ser desenvolvido.
O grau de rotação molecular pode alterar completamente as características
de uma substancia, por exemplo, podemos citar que o que difere o sabor laranja
para o sabor limão (mesma estrutura molecular) é simplesmente o seu grau de
rotação molecular. (BEL BRASIL, 2000)
As usinas de açúcar utilizam o polarímetro para avaliar a quantidade de
sacarose / glicose presente em uma amostra durante o processo de fabricação.
Sua aplicação no campo produtivo se concentra no controle do processo e no
controle de qualidade. É utilizado na industria farmacêutica, química, usinas de
açúcar, alimentícias, petrolíferas, etc. No campo da pesquisa é utilizado no
desenvolvimento de novos produtos. Atualmente existem polarímetros acoplados
à instrumentos da astrofísica gerando mais uma ampla área de pesquisa e
desenvolvimento.
O objetivo desse trabalho é a construção de um polarímetro digital que tem
por função gerar um gráfico da curva de intensidade da luz - rotação do filtro
detector.
O polarímetro digital é composto por três partes principais descritas abaixo:
•
Aquisição: Compreende a parte óptica do sistema, onde um feixe de luz
monocromático e polarizado passa por uma substância opticamente ativa,
e de acordo com a rotação molecular da substância, o plano polarizado do
feixe também é rotacionado. Um filtro polarizador detector rotacional tem a
função de detectar tal variação no ângulo do plano polarizado da luz.
13
•
Detecção: Desempenha a característica digital do polarímetro, onde
informações referentes à intensidade da luz analisada e ângulos de rotação
do filtro detector, são tratadas e microcontroladas.
•
Análise: Interface onde o usuário final terá acesso via PC das informações
tratadas no sistema. Um gráfico da curva de intensidade da luz - rotação do
filtro analisador será plotado na tela do computador para verificação do
comportamento óptico da substância analisada.
A grande motivação desse projeto é o desenvolvimento e construção de um
aparelho digital de fácil operabilidade, alta precisão e baixo custo.
2. Fundamentação Teórica
2.1 Polarimetria
Polarimetria é uma técnica usada para analisar sustâncias usando
conceitos de polarização da luz. O aparelho utilizado para aplicações da técnica
de polarimetria é o polarímetro.
2.1.1 Polarímetros
Um instrumento capaz de medir o estado de polarização da luz é chamado
de polarímetro. Essas medições são realizadas através da leitura de intensidades
de luz após sua passagem por alguns dispositivos ópticos, de forma a obter não
apenas o estado de polarização como também o grau de polarização da luz.
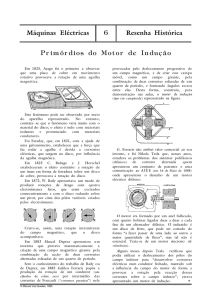
A Figura 2.1 representa o funcionamento básico de um polarímetro.
14
Feixe de luz
após passar
pela
substancia
Onda não
polarizada
Onda paralela
ao eixo de
simetria
Feixe de luz resultante
Figura 2.1 – Esquema óptico de um polarímetro
Um emissor de luz monocromática envia um feixe de luz até o primeiro filtro
polarizador. A luz não polarizada é aquela que vibra transversalmente em todas as
direções, perpendiculares a um eixo de propagação. Ao atravessar o filtro
polarizador, a luz emergente, polarizada, que vibra num único plano de vibração,
atravessa o pequeno tubo cilíndrico transparente com a substância em análise.
Varias substâncias transparentes, que são caracterizadas por uma falta de
simetria em sua estrutura molecular ou cristalina, apresentam a propriedade de
girar o plano da luz polarizada (MÉTODOS INSTRUMENTAIS DE ANÁLISE
QUÍMICA, 1977) . Essas substâncias são chamadas de opticamente ativas.
Se para a luz polarizada for necessário girar o analisador para a direita ou
para a esquerda para verificação do seu pico de intensidade, a substância é
opticamente ativa: dextrógira (desvio para a direita) ou levógira (desvio para a
esquerda).
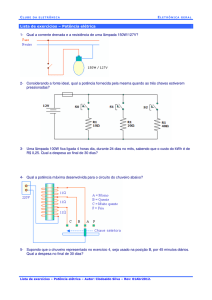
Em polarímetros analógicos, é necessária a rotação manual do filtro
detector através de uma roda manual de rotação dial e um observador deve
acompanhar o feixe de luz. Um instrumento manual é típico é mostrado na Figura
2.2. O funcionamento básico em polarímetros analógicos ocorre de modo que a
radiação monocromática de uma lâmpada de sódio é tornada paralela por um
colimador e polarizada por um prisma de calcita. Em seguida ao polarizador há
uma pequena calcita auxiliar arranjada para interceptar a metade do feixe. A
radiação então passa pela amostra que está contida em um tubo de vidro de
comprimento conhecido fechado em ambas as extremidades por placas de vidro
15
claras, depois através do analisador e vai ocular para observação visual
(MÉTODOS INSTRUMENTAIS DE ANÁLISE QUÍMICA, 1977). Contudo esse
arranjo não é satisfatório porque exige do observador identificar a posição onde a
radiação transmitida é zero, o que não se pode fazer com precisão.
Há uma posição particular do analisador em que as radiações que passam
pelas duas metades do feixe são exatamente iguais em energia. Isso fornece um
ponto de referencia mais satisfatório, pois a observação visual consiste em
comparar exatamente as energias dos dois meio-feixes em algum nível
intermediário, para o que é bem adequado o uso da vista.
Filtro detector rotacional
Tubo contendo a amostra
Lente para observação
Filtro polarizador fixo
Roda manual
Fonte de luz
Figura 2.2 – Polarímetro analógico
Fonte: http://www.auxilab.es/imagenes/polarime/50404000.jpg
Atualmente existem polarímetro digitais que facilitam a análise de
substâncias, porém são de custos consideravelmente elevados o que dificultam a
sua aquisição.
A Figura 2.3 representa um polarímetro digital da marca Jasco – série
P1000.
Figura 2.3 – Polarímetro digital
Fonte: http://www.satia-jasco.com.ar/imagenes/polarimetro.jpg
16
2.1.2 Filtros Polarizadores
Os filtros polarizadores ou Polaróides são basicamente placas de plástico
flexível, que tem sua polarização estabelecida durante seu processo de
fabricação. A direção de polarização é estabelecida estirando-a de modo que as
moléculas se alinhem todas paralelamente entre si. Desta forma quando um trem
de ondas de uma luz comum incidir sobre o filtro, será transmitido apenas o
componente paralelo à orientação do filtro.
Caso sejam utilizados dois filtros polarizadores no trajeto luminoso, será de
extrema importância conhecer-se o ângulo formado entre as orientações de
propagação de ambos, pois dele dependerá a intensidade luminosa transmitida,
este fenômeno é equacionado pela Lei de Malus:
I = Im cos 2 θ
Equação 2.1 – Lei de Malus
Onde: I = intensidade transmitida
Im = intensidade máxima de transmissão
θ = ângulo entre as direções de propagação dos filtros
Segundo a Lei de Malus a intensidade luminosa transmitida será máxima
quando o ângulo θ assumir os valores 00 e 1800 ( orientação paralela ) e mínima
quando o ângulo θ assumir os valores 900 e 2700 ( orientações ortogonais ).
A Figura 2.4 representa o comportamento dos filtros ópticos em relação a
um ângulo θ de 90°. Sendo assim a intensidade da luz transmitida após passar
pelo segundo filtro polarizador é mínima.
Onda não
polarizada
17
2.2 O Estudo da Luz
2.2.1 Ondas Eletromagnéticas
A grande contribuição de Maxwell foi mostrar que a óptica, o estudo da luz
visível, é um ramo do eletromagnetismo e que um feixe de luz é uma configuração
de campos elétricos e magnéticos que se propagam (HALLIDAY, 1991).
É difícil imaginarmos até que ponto somos banhados pela radiação
eletromagnética das várias regiões do espectro. Somos também entrecruzados
por sinais de rádio e televisão. Microondas de sistemas de radar e de sistemas de
transmissão de telefonia podem nos alcançar. Temos ondas eletromagnéticas
provenientes de lâmpadas elétricas, de blocos de motores aquecidos de
automóveis, de maquinas de raios X, de relâmpagos e de matérias radioativos
existentes no solo.
Ondas eletromagnéticas também são emitidas em sentidos opostos. Sinais
de televisão, transmitidos na Terra desde 1950, estarão sendo captados
eventualmente por habitantes de outros planetas que já possuem técnicas
sofisticadas, num raio que abrange cerca de 400 estrelas (HALLIDAY, 1991).
A região visível do espectro eletromagnético é naturalmente, de particular
interesse para nós. A Figura 2.5 mostra a sensibilidade relativa do olho de um
suposto observador padrão para radiações de vários comprimentos de onda.
Figura 2.5 – Gráfico do espectro visível
18
Os limites do espectro visível não são bem definidos, porque a curva de
sensibilidade do olho aproxima-se assintoticamente da linha de sensibilidade zero
tanto para os maiores quanto para os menores comprimentos de ondas. Em
muitas experiências, são usados chapas fotográficas ou detectores eletrônicos
fotossensíveis em lugar do olho humano.
2.2.2 Polarização da Luz
Uma onda eletromagnética polarizada teu seu campo elétrico oscilando em
somente uma direção (HALLIDAY, 1991).
A onda eletromagnética transversal da Figura 2.6 é polarizada (mais
especificamente plano polarizada) na direção y, o que significa que as vibrações
do vetor campo elétrico são paralelas a essa direção em todos os pontos ao longo
da onda.
Figura 2.6 – Onda plano polarizada
O plano definido pela direção de propagação (o eixo x) e a direção de
polarização (eixo y) é chamado de plano de vibração.
2.2.2.1 Luz Polarizada
Nas fontes de onda de rádio e microondas, os radiadores elementares, que
são elétrons em movimento de vaivém na antena transmissora, atuam em
unissonância; dizemos que eles formam uma fonte coerente. Entretanto nas fontes
19
comuns de luz, tais como o sol ou uma lâmpada fluorescente, os radiadores
elementares, que são átomos constituintes da fonte, atuam independentemente
uns dos outros. Por causa dessa diferença, a luz emitida de tais fontes numa dada
direção consiste em muitas ondas independentes cujos planos de vibração se
acham orientados aleatoriamente, em torno da direção de propagação como na
Figura 2.7, a onda é dita não polarizada.
Figura 2.7 – Onda não polarizada
Podemos transformar luz originalmente não polarizada em luz polarizada
fazendo-a passar por uma placa polarizadora. No plano da placa consiste uma
direção característica chamada direção de polarização.
A direção da placa é estabelecida durante o processo de fabricação,
quando certas moléculas de cadeia longa são inseridas numa placa de plástico
flexível e estirando-a de modo que as moléculas se alinhem paralelamente uma as
outras. Tal placa absorve a radiação polarizada numa direção paralela às
moléculas longas, a radiação perpendicular a elas é transmitida.
Na Figura 2.8 somente os componentes elétricos verticais são transmitidos
pela placa, os componentes horizontais são absorvidos. Isso transforma a luz
originalmente não polarizada em luz polarizada.
Quando se faz passar luz originalmente não polarizada através de uma
placa polarizada a intensidade transmitida é um pouco menos da metade da
intensidade original.
20
Coloquemos no trajeto luminoso uma segunda placa polarizadora P2,
analisadora. Girando-se P2 em torno da direção de propagação, há duas posições
defasadas uma da outra de 180°, nas quais a intensidade da luz transmitida quase
se anula, essas são as direções para qual as placas são perpendiculares entre si.
Sendo Em a amplitude da luz polarizada que incide em P2, a amplitude da
luz que emerge vale Emcos•, onde • é o ângulo entre as direções de polarização
das placas. Lembrando que a intensidade de uma onda eletromagnética é
proporcional ao quadrado da amplitude podemos usar a Equação 2.1 para mostrar
que a intensidade transmitida I varia com • de acor do com a expressão onde Im é
o valor máximo da intensidade transmitida. Esse máximo ocorre quando as
direções de polarização das placas são paralelas (• = 0° ou 180°) e assim a luz
transmitida através da região de superposição é agora um mínimo (HALLIDAY,
1991).
2.3 Rotação óptica
Algumas substâncias, sólidas ou liquidas, possuem a capacidade de
produzir um desvio no plano da luz polarizada. São chamadas de substancias
opticamente ativas. Quando esse desvio é para a direita (no sentido horário)
dizemos que a substancia é dextrógira (representada pela letra d ou pelo sinal de
+(positivo)). Quando o desvio é para a esquerda (no sentido anti-horário) dizemos
que a substancia é levógira (representada pela letra I ou pelo sinal de –
(negativo)). Quando uma substância opticamente ativa é atravessada pela luz
polarizada, ocorre uma variação no plano de vibração, que é passado para um
analisador, que faz a leitura do ângulo de rotação (desvio do plano). A atividade
óptica se desenvolve nos casos: (QUÍMICA 2000 - WAGNER XAVIER ROCHA,
1999).
1. Algumas substâncias, sólidas ou líquidas, possuem a capacidade de
produzir um desvio no plano.
2. Quando nos líquidos, estes devem ser formados por
moléculas
assimétricas.
21
2.3.1 Rotação especifica
Os enantiômeros possuem propriedades físicas e químicas idênticas, pois
são o mesmo composto, com igual número e tipo de átomos e ligações. Registrase apenas uma característica diferente: a rotação causada no plano da luz
polarizada. Apenas o sentido da rotação é diferente. A magnitude da rotação é a
mesma. Se, por exemplo, num dos isômeros, a rotação específica é de + 5,756o,
no outro é de - 5,756o.
Quando se misturam os enantiômeros em quantidades iguais, tem-se uma
mistura racêmica ou racemato, opticamente inativa. Isso porque as moléculas
levógiras anulam o efeito das dextrógiras sobre a luz polarizada e vice-versa.
Numa
substância
opticamente
ativa,
não
contaminada
pelo
respectivo
enantiômero, a rotação provocada pelas moléculas não é anulada, já que
nenhuma molécula pode ser considerada como imagem em espelho plano de
outra, seja qual for a distribuição em que elas se encontrem no espaço (QUÍMICA
2000 - WAGNER XAVIER ROCHA, 1999).
A rotação específica pode ser dada pela Equação 2.2:
[α] = α / l.e
Equação 2.2 – Rotação especifica
Onde:
[α] - rotação específica
α - desvio no plano da luz polarizada (em graus)
l - comprimento do tubo
e - concentração da substância (em g/ml)
OBS: Caso se trate de uma substância pura não diluída, a concentração é
substituída pela densidade dessa substância.
22
2.3.2 Elementos de simetria molecular
Os principais elementos de simetria molecular são o plano, o eixo e o
centro. As moléculas que apresentam pelo menos um desses elementos são
simétricas e, conseqüentemente, não têm atividade óptica, ou seja, não desviam o
plano da luz polarizada. São por isso ditas opticamente inativas. No entanto,
moléculas que apresentam apenas o eixo de simetria (não possuem plano nem
centro de simetria) podem apresentar atividade óptica. Estas moléculas são ditas
dessimétrica. As moléculas que não apresentam nenhum desses elementos de
simetria são assimétricas e ditas opticamente ativas, pois têm atividade óptica.
(QUÍMICA 2000 - WAGNER XAVIER ROCHA, 1999)
Algumas
substâncias
diluídas
e
suas
especificas
rotações
são
representadas na Tabela 2.1.
Tabela 2.1 - Rotação óptica das substâncias
Substancia ativa
Solvente
Cânfora
Calciferol
Calciferol
Colesterol
Sulfato de quinina
Acido l-tartárico
Tártaro de sódio e
postássio
Sacarose
Glicose
Frutose
Lactose
Álcool
Clorofórmio
Acetona
Clorofórmio
Água
Água
Água
Rotação
Especifica
+43,8
+52,0
+82,6
-39,5
-220
+14,1
+29,8
Água
Água
Água
Água
+66,5
+52,7
-92,4
+55,4
2.4 Estudo dos componentes do sistema
2.4.1 Motor de passo
O motor de passo é um transdutor que converte energia elétrica em movimento
controlado através de pulsos, o que possibilita o deslocamento por passo, onde
23
passo é o menor deslocamento angular. A vantagem do motor de passos em
relação aos outros motores é a estabilidade. Para obter uma rotação especifica de
um certo grau, calculamos o número de rotação por pulsos o que nos possibilita
uma boa precisão no movimento.
2.4.1.1 Parâmetros importantes
•
Rotação em ambas as direções,
•
Variações incrementais de precisão angular,
•
Repetição de movimentos bastante exatos,
•
Um torque de sustentação à velocidade zero,
•
Possibilidade de controle digital.
2.4.1.2 Funcionalidade
Normalmente os motores de passo são projetados com enrolamento de
estator polifásico o que não foge muito dos demais motores. O número de pólos é
determinado pelo passo angular desejado por pulsos de entrada. O motores de
passo tem alimentação externa. Conforme os pulsos na entrada do circuito de
alimentação, este oferece correntes aos enrolamentos certos para fornecer o
deslocamento desejado.
2.4.1.3 Tipos de motores
Os motores de passo podem ser bipolares, que requerem duas fontes de
alimentação ou uma fonte de alimentação de polaridade comutável, ou unipolares,
que requerem apenas uma fonte de alimentação. Em ambos os casos as fontes
utilizadas são de tensão contínua e requerem um circuito digital que produza as
seqüências para produzir a rotação do motor. No controle de um motor de passo
nem sempre é necessária a implementação de uma estratégia de realimentação,
mas a utilização de um encoder, ou de outro sensor de posição poderá assegurar
24
uma melhor exatidão sempre que for essencial. A vantagem de operar sem
realimentação é que deixa de ser necessário um sistema de controle em malha
fechada.
2.4.1.3.1 Motores de passo unipolares
Os motores de passo unipolares são facilmente reconhecidos pela
derivação ao centro em cada um dos enrolamentos. O número de fases é duas
vezes o número de bobinas, uma vez que cada bobina se encontra dividida em
duas. Na Figura 2.9 temos a representação de um motor de passo unipolar de 4
fases. Normalmente, a derivação central dos enrolamentos está ligada ao terminal
positivo da fonte de alimentação e os extremos de cada enrolamento são ligados
alternadamente à terra para assim inverter a direção do campo gerado por cada
um dos enrolamentos.
Figura 2.9 - Motor de passo unipolar
Fonte: http://aquarius.ime.eb.br/~pinho/micro/trabalhos/Mecatronica_TP1.pdf
Na Figura 2.9 ainda podemos ver o corte transversal de um motor com um
passo de 30 graus. O enrolamento 1 encontra-se distribuído entre o pólo superior
e pólo inferior do estator do motor, enquanto que o enrolamento 2 encontra-se
distribuído entre o pólo esquerdo e o pólo direito do estator. O rotor é um magnete
permanente com seis pólos (3 pólos sul e 3 pólos norte), dispostos ao longo da
circunferência do rotor. Para uma resolução angular maior, o rotor deverá conter
proporcionalmente mais pólos.
Tal como apresentado na Figura 2.9, a corrente a fluir da derivação central
do enrolamento 1 para o terminal a faz com que o pólo superior do estator seja um
pólo norte enquanto que o pólo inferior seja um pólo sul. Esta situação provoca
25
uma deslocação do rotor. Se for removida a alimentação do enrolamento 1 e for
alimentado o enrolamento 2, o rotor irá deslocar-se 30º, ou seja, um passo. Para
obter uma rotação contínua do motor, deverão ser alimentados alternadamente os
enrolamentos do motor.
Na Tabela 2.2, podemos perceber que, assumindo uma lógica positiva, em
que o valor lógico 1 significa fazer passar a corrente num dos enrolamentos, a
seqüência mostrada, produzirá um deslocamento de oito passos (8´30=240º)
(UNIVERSIDADE
DE
COIMBRA
-
DEPARTAMENTO
DE
ENGENHARIA
ELETROTÉCNICA E DE COMPUTADORES – 2002).
Tabela 2.2 – Atuação de um motor de passo unipolar
Fonte: http://aquarius.ime.eb.br/~pinho/micro/trabalhos/Mecatronica_TP1.pdf
2.4.1.3.2 Motores de passo bipolares
Ao contrário dos motores de passo unipolares, os motores bipolares
requerem um circuito de atuação bem mais complexo. Os motores de passo
bipolares são proporcionam um maior torque comparativamente a um motor
unipolar do mesmo tamanho.
26
Figura 2.10 - Motor de passo bipolar
Fonte: http://aquarius.ime.eb.br/~pinho/micro/trabalhos/Mecatronica_TP1.pdf
Os motores bipolares são constituídos por enrolamentos separados que
devem ser atuados em ambas direções para permitir o avanço de um passo, ou
seja, a polaridade deve ser invertida durante o funcionamento do motor. O padrão
de atuação do driver é de todo semelhante ao obtido para o motor de passo
unipolar em full-step, mas em vez de 0’s e 1’s temos o sinal da polaridade aplicada
às bobinas. Um exemplo de aplicação pode ser encontrado na Tabela 2.3, onde é
implementada a estratégia de atuação do driver referente ao motor apresentado
na Figura 2.10. A Figura 2.11 reapresenta um esquema elétrico típico para um
driver para motor de passo. (UNIVERSIDADE DE COIMBRA - DEPARTAMENTO
DE ENGENHARIA ELETROTÉCNICA E DE COMPUTADORES – 2002)
Tabela 2.3 – Atuação de um motor de passo bipolar de quatro fases
Fonte: http://aquarius.ime.eb.br/~pinho/micro/trabalhos/Mecatronica_TP1.pdf
27
Controlador
Motor de passo
Figura 2.11 – Esquema elétrico típico para um driver de motor de passo.
Fonte: http://aquarius.ime.eb.br/~pinho/micro/trabalhos/Mecatronica_TP1.pdf
2.5 Microcontrolador
O Microcontrolador corresponde a um microprocessador e seus periféricos
típicos, todos juntos num só chip. (MICROCONTROLADOR 8051 – DETALHADO,
2000)
Um microcontrolador típico possui:
•
UCP (Unidade Central de Processamento);
•
RAM (Memória de Acesso Aleatório) - memória de dados;
•
EPROM/PROM/ROM - memória de programa;· Dispositivos de E/S
(Entrada e Saída) - serial e/ou paralelo;
•
Contadores / Temporizadores;
•
Controlador de interrupção.
28
Por incluir somente as características específicas para a tarefa (controlar),
seu custo é relativamente baixo. Um microcontrolador típico possui instruções
para manipulação de bits, acesso direto a E/S (Entrada/Saída), e rápido e eficiente
processo de interrupção. Microcontroladores são uma “solução em um chip” que
reduz drasticamente o número de componentes e o custo do projeto.
Há uma grande gama de aplicações para os microcontroladores, e os
mesmos são muito encontrados em aplicações dedicadas, como fornos de
microondas, televisores, videocassetes, aparelhos de som, controle de motores de
automóveis e instrumentação. Na robótica são usados em larga escala, onde
diversos microcontroladores controlam, cada um, tarefas específicas e se
comunicam com um microcontrolador central, microcomputadores ou até mesmo
um computador. Os microcontroladores também são utilizados para a aquisição de
dados, pois suas características como tamanho reduzido, baixo consumo de
energia e flexibilidade fazem com que o mesmo possa ser utilizado, por exemplo,
em balões meteorológicos. Ainda neste tipo de aplicação temos a aquisição de
dados em estações meteorológicas (pluviosidade, velocidade do vento).
Existe uma grande variedade de microcontroladores disponíveis. De acordo
com o poder de processamento e características que são necessárias para
desenvolver cada projeto pode-se escolher microcontroladores de 4, 8, 16 ou até
32 bits. Complementando, versões especializadas incluem características
específicas para comunicações, processamento de sinais, processamento de
vídeo e outras tarefas. (UNIVERSIDADE ESTADUAL DO OESTE DO PARANÁ –
DEPARTAMENTO DE INFORMÁTICA – 1999)
29
3. Especificação Técnica
O sistema proposto deve ser capaz de determinar o grau de rotação do
plano polarizado da luz monocromática, ao incidir em determinadas substâncias
opticamente ativas, analisando assim, seu o grau de rotação molecular. O projeto
é dividido em três partes:
•
Aquisição
1. Laser emitindo um feixe de luz monocromática;
2. Filtro polarizador fixo, responsável pela polarização linear do feixe;
3. Superfície que comporta a substância a ser analisada;
4. Filtro polarizador detector rotacional que detecta o ângulo do plano
polarizado do feixe após passar pela substância;
5. Sensor de temperatura para controlar a temperatura da amostra;
6. Fotodiodo para determinar a variação da intensidade da luz.
• Detecção
1. Motor de passo para rotacionar o filtro detector;
2. Interface para controlar via microcontrolador a rotação do motor;
3. Amplificador para o sinal proveniente do sensor de temperatura;
4. Conversor Analógico / Digital;
5. Microcontrolador para leitura e processamento das informações dos
sensores e controle do motor de passo.
•
Análise
1. Sistema composto por botões onde é possível ligar e desligar o
sistema;
2. Software para calibração e análise do sistema.
A luz monocromática é aquela que é constituída de um único comprimento
de onda ou variável em um intervalo bastante estreito. Devido a esse fato, foi
30
selecionada como fonte de luz do sistema, um laser com comprimento de onda de
690nm.
O Laser é alimentado por uma fonte externa de corrente continua, evitando
que ruídos provenientes da rede elétrica prejudiquem o desempenho do sistema.
O feixe emitido pelo laser passa por um filtro polarizador fixo que possui seu eixo
de simetria a um ângulo de 180°, fazendo com que o plano da luz também se
torne linearmente polarizado à 180°.
O feixe plano polarizado atravessa um tubo cilíndrico transparente contendo
uma amostra da substância que se deseja analisar. Se a substância possuir
atividade óptica, fará com que o plano polarizado do feixe rotacione de acordo
com sua rotação molecular.
O filtro detector é rotacionado, não permitindo a passagem de radiações
perpendiculares ao seu eixo de simetria. Quando o plano polarizado for paralelo
ao eixo de simetria do detector, este permitirá a passagem total do feixe de luz.
Um fotodiodo, acoplado atrás do filtro detector, recebe as informações
referentes às diferentes intensidades do feixe de luz a medida em que o filtro é
rotacionado. A energia radiante recebida pelo fotodiodo é transformada em sinal
elétrico, esse sinal passa por tratamento, amplificação e conversão.
O Microcontrolador controla o motor de passo que proporciona a rotação do
filtro detector, também recebe o sinal proveniente do fotodiodo e estabelece uma
relação entre o ângulo de rotação do filtro e sua respectiva intensidade da luz
naquele instante.
Um sensor de temperatura analisa a temperatura da substância, pois esse
fator pode alterar sua rotação óptica. Essa informação também é enviada ao
microcontrolador.
Finalmente a analise do comportamento da substância é verificada via
software que recebe os dados necessários via porta serial. Um gráfico de
intensidade da luz - rotação do filtro detector faz possível compreender a atividade
óptica da substância em análise. A Figura 3.1 representa o diagrama em blocos do
polarímetro.
31
Figura 3.1- Diagrama em blocos do sistema
3.1 Especificação de Hardware
O hardware desenvolvido para o polarímetro faz uso da placa contendo a
arquitetura básica para o microcontrolador 8031. O Diagrama esquemático da
placa está detalhado em anexo a esse documento.
Os demais componentes utilizados no projeto são listados abaixo:
•
Conversor Analógico/ Digital
Para que o microcontrolador possa processar os sinais analógicos
provenientes dos sensores, torna-se necessário que esses sejam convertidos para
dados digitais. O conversor selecionado para o projeto é o ADC0808 da National
Semiconductor, ele possui 8 entradas multiplexadas e resolução de 8 bits.
32
O fotodiodo e o sensor de temperatura ocupam as entradas IN0 e IN1 do
conversor, respectivamente. Os 8 bits de saída são necessário devido à alta
precisão envolvida no mecanismo do projeto. As saídas do conversor são ligadas
ao port P1 do microcontrolador e estão representadas com maior detalhe no
diagrama esquemático em anexo a esse documento.
Figura 3.2 – Pinagem do conversor ADC0808
Fonte: National Semiconductor. Datasheet ADC0808. P 02
A saída do conversor é ligada ao port 1 do microcontrolador, sendo que o
bit menos significativo ocupa o pino P1.0 e o mais significativo ocupa o P1.7. A
seleção de entrada é feita através de uma lógica usando o pino A15 e o latch
74LS373. Quando A recebe nível lógico 0 o fotodiodo é selecionado, quando A
recebe nível lógico 1 o sensor de temperatura é selecionado
•
Sensor de Temperatura
Acoplado ao recipiente da amostra, o Sensor de Temperatura LM35 da
National Semiconductor, aumenta a precisão no sistema, assegurando que a
temperatura da substância não afetará os resultados finais analisados. O sensor
opera em temperaturas de -55°C até 150°C e sua resposta é de 10mV por °C.
Para que fosse possível trabalhar com a conversão foi necessário inserir um
33
amplificador operacional para aumentar o ganho total para uma escala entre 0V e
5V. O ganho estimado para manter o sinal entre 0V e 5V é de 10. Para circuitos
desse tipo o ganho é calculado como A = 1 + R1 / R2. O circuito foi desenvolvido
com resistores de 1K para R1 e 9K para R2.
O Circuito do ganho é representado na figura a seguir:
VIN
VOUT
2
1K
ADJ
3 +
1
2 -
LM350/TO
TEMP
LM324
11
1
U2A
4
U1
3
TEMP
9K
VCC
Figura 3.3 – Circuito amplificador de ganho 10
•
Fotodiodo
O fotodiodo OPT101 da Burr-Brown é responsável pela detecção da
intensidade do feixe de luz a medida em que o filtro detector é rotacionado.
O componente possui resposta em freqüência e combina um fotodiodo com
amplificador internamente. Seu diagrama esquemático é ilustrado em anexo.
•
Interface para motor de passo
Para que o microcontrolador possa controlar o motor de passos torna-se
necessário o uso de uma interface de potencia.
O diagrama esquemático da
interface está demonstrado no anexo a esse documento.
34
•
Motor de passo
O projeto do Polarímetro digital requer uma alta precisão ocasionando alta
precisão nos passos do motor. Para que isso ocorra foi usado um motor de passo
de 1,8° por passo, acoplado a um mecanismo de redução para que a precisão do
motor aumente para um valor mais próximo ao encontrado em polarímetros
digitais comerciais que possuem em média uma resolução de 0,001°. A Figura 3.4
mostra um motor de passo.
Figura 3.4 – Motor de passo
Figura 3.5 – Engrenagem para redução 10x1
O Diagrama Esquemático do projeto encontra-se em anexo a esse
documento e com ele é possível visualizar a pinagem dos respectivos
componentes utilizados no projeto.
O polarímetro digital proposto possui de um sistema óptico que consiste em
um laser com comprimento de onda variando de 650nm e 690nm e filtros
polarizadores lineares utilizados em máquinas fotográficas. Toda a parte óptica do
sistema está embutida em uma caixa de madeira escura de forma que nenhuma
luz exterior interfira nos resultados esperados, conforme a figura 3.6.
35
Figura 3.6 – Polarímetro Digital
3.1.2.1 Firmware
Também conhecido como software embarcado, trata-se de um software que
controla o hardware diretamente. É armazenado permanentemente em um chip de
memória de hardware, como uma ROM ou EPROM. Suas principais funções são:
•
Enviar sinais digitais responsáveis pelo controle do motor de passo;
•
Receber sinais digitais, referente a informações do sensor de temperatura
e do fotodiodo;
•
Estabelecer uma relação entre a intensidade da luz fornecida pelo
fotodiodo e o grau de rotação do motor de passo;
•
Enviar dados digitais via porta seria.
O firmware foi desenvolvido na linguagem C de programação,na plataforma
Keil uVision 3.
A Figura 3.7 consiste em um diagrama de estados do motor
Cont < 2000
Cont >2000
Cont = 2000
Circuito ligado
Motor girando
Motor parado
36
A Figura 3.8 representa o fluxograma do firmware utilizado no projeto
Figura 3.8 – Fluxograma do firmware
3.3 Especificação de Software
3.3.1 Funções
O software tem por finalidade realizar a interação do usuário com o sistema
desenvolvido. Através do software é possível que o usuário visualize os resultados
referentes aos dados trabalhados ao longo de todo o processo de polarização.
37
As principais funções do software são:
•
Gerar gráfico de intensidade da luz x rotação do filtro polarizador
•
Calibrar e Parar a curva que descreve o comportamento do sistema
•
Desligar o sistema
Basicamente o software desenvolvido para o polarímetro, plota um gráfico
onde é possível visualizar o comportamento da intensidade da luz a medida em
que o filtro analisador é rotacionado.
Os pontos do gráfico, onde a intensidade da luz é zero, representam que o eixo
óptico do filtro polarizador encontra-se exatamente na posição perpendicular ao
ângulo do plano da luz, não permitindo assim, a passagem da mesma. O pico da
intensidade da luz é caracterizado pela posição do plano polarizado paralelo ao
eixo óptico do filtro analisador, permitindo assim a passagem total do feixe de luz.
A Figura 3.9 representa a interface gráfica que faz a interação do sistema com
o usuário final.
Figura 3.9 – Interface Gráfica
38
4. Projeto
4.1 Projeto de Hardware
Todos os esquemáticos relativos ao diagrama em blocos da figura 3.1 são
mostrados na seção de anexos desse documento.
Abaixo está a tabela 4.1 que relacionam os sinais de interface entre os
blocos de hardware.
Tabela 4.1 – Sinais de Interface
RÓTULO
TIPO DE
BARRAMENTO
FD
Dados
LÓGICA DE
OPERAÇÃO /
AMPLITUDE
0 a 5V
TEMP
Dados
0 a 5V
CTR
Controle
0/1
IN1
Controle
0/1
IN2
Controle
0/1
IN3
Controle
0/1
IN4
Controle
0/1
FUNÇÃO
Saída do fotodiodo para
conversão A/D
Saída do sensor de temperatura
para conversão A/D
Seleciona a entrada do
conversor A/D
Ativa a bobina 1 do motor de
passo
Ativa a bobina 2 do motor de
passo
Ativa a bobina 3 do motor de
passo
Ativa a bobina 4 do motor de
passo
4.2 Projeto de Software
O Software foi desenvolvido em linguagem C++ de programação através da
ferramenta C++ Builder 6.0.
A seguir são representados os diagramas relativos à lógica do software que
é executado no microcomputador.
39
4.2.1 Diagrama de Casos de Uso
Os casos de uso especificam o comportamento do sistema ou parte(s) dele
e descrevem a funcionalidade do sistema desempenhada pelos atores. Podemos
imaginar um caso de uso como um conjunto de cenários, onde cada cenário é
uma seqüência de passos a qual descreve uma interação entre um usuário e o
sistema.
A Figura 4.1 ilustra os casos de uso observados no sistema
Sistema
Gerar Curva
Parar
Calibrar
Usuário
Desligar
Figura 4.1 – Diagrama de Casos de Uso
•
Gerar Curva: gera a curva referente a intensidade de luz transmitida pelo
fotodiodo em relação ao ângulo do motor de passo;
•
Parar: Congela a imagem da curva para que o usuário possa analisar o seu
comportamento;
•
Calibrar: O motor de passo volta à posição original e a curva é
reinicializada;
•
Desligar: O usuário desativa o sistema.
40
4.2.2 Diagramas de Seqüência
Consiste em um diagrama que tem o objetivo de mostrar como as
mensagens entre os objetos são trocadas no decorrer do tempo para a realização
de uma operação.
A Figura 4.2 ilustra o diagrama de seqüência do caso de uso gerar curva, O
usuário inicia o processo de aquisição da curva onde visualiza o comportamento
do fotodiodo em relação ao ângulo do motor de passo.
A Figura 4.3 representa a possibilidade do ator externo “congelar” a imagem
da curva para analisar precisamente a resposta do fotodiodo.
A calibração da curva ocorre no momento em que há necessidade da curva
ser reinicializada. Na figura 4.4 é ilustrado o diagrama de seqüência em que o ator
externo interage na calibrando o sistema.
A Figura 4.5 representa o diagrama de seqüência em que o ator externo
pode desligar o sistema.
Sistema
Usuário
gerarCurva()
Figura 4.2 – Diagrama de seqüência “Gerar Curva”
41
Sistema
Usuário
pararCurva()
Figura 4.3 - Diagrama de seqüência “Parar Curva”
Sistema
Usuário
CalibrarCurva()
Figura 4.4 - Diagrama de seqüência “Calibrar Curva”
Sistema
Usuário
Desligar()
Figura 4.5 - Diagrama de seqüência “Desligar”
42
4.2.3 Diagrama de Classes
Os diagrama se classes ilustram atributos e operações de uma classe e as
restrições como que os objetos podem ser conectados ; descrevem também os
tipos de objetos no sistema e os relacionamentos entre estes objetos.
CSerial
-FPorta:AnsiString
-bInicializado:bool
-dcbStatus:DCB
-hComm:HANDLE
-Timeouts: COMMTIMEOUTS
+CSERIAL(in Porta: AnsiString, in Velocidade:unsigned short)
+~CSERIAL()
+ Enviar(in *Buffer:unsigned char, in &BufferSize: int):bool
+ Receber(in *Buffer:unsigned char, in &BufferSize:int):bool
+LimpaBuffer():void
-SetTimeouts():void
UFrmPrincipal
-*fotodiodo:CFotodiodo
-*fotodiodo:CTemperatura
-*vetor:double
-cont:int
-nPorta:AnsiString
UfrmPrincipal (in Owner: Tcomponent*)
+getSize() :int
+getVetor():double*
Plotar(in vettor:double*):void
Calibrar():void
Parar():void
Desligar():void
CThreadTemperatura
-*temperatura: CTemperatura
-nporta: AnsiString
+CThreadLeitura(in *temperatura: CTemperatura, in porta:
AnsiString
#Execute():void
CThreadFotodiodo
-*fotodiodo: CFotodiodo
-nporta: AnsiString
+CThreadLeitura(in *fotodiodo: CFotodiodo, in porta: AnsiString
#Execute():void
Figura 4.6 – Diagrama de Classes
43
5. Resultados e Validação
A curva de calibração foi obtida com a presença de água mineral no tubo de
ensaio do polarímetro. Desta forma o aparelho demonstrou os picos de
intensidade máxima e mínima nos ângulos esperados. Uma vez que os filtros
polarizadores estavam em posições paralelas na horizontal, e não há desvio no
plano polarizado da luz, esperava-se que em 0° ou 180° a intensidade de luz
captada pelo fotodiodo fosse máxima. Quando o filtro rotacional encontra-se no
ângulo de 90° ou 270°, perpendiculares a 0° ou 180°, esperava-se que o fotodiodo
registrasse intensidades mínimas como pode ser verificado na figura 5.1.
Figura 5.1 – Curva de calibração
44
A curva de calibração demonstra exatamente o comportamento de um feixe
de luz passante por filtros polarizadores. Para cada 0,18° do filtro polarizador
detector acontece uma leitura do valor referente à intensidade de luz naquele
instante.
No campo Rotação Óptica é possível analisar se a substância tem a
propriedade de alterar o comportamento do plano polarizado da luz. No caso da
água, verificou-se, ao final da leitura, que sua rotação óptica marcou 0°, ou seja, o
plano da luz não foi alterado.
O segundo teste realizado foi com a presença de 50g glicose diluída em 30g
de água, inserido no tubo de ensaio especial para polarímetros como pode ser
visto na figura 5.2. Neste caso a glicose apresentou uma alteração no ângulo de
polarização da luz de 48,6° como pode ser verificado na Figura 5.3.
Figura 5.2 – Tubo de ensaio para polarímetro
45
Figura 5.3 – Curva de Glicose
Comparando os resultados obtidos no aparelho desenvolvido com os
resultados obtidos com um polarímetro analógico, verificamos um erro de
aproximadamente 5° nessa análise. Esse erro é considerado significativo quando
se trata de um aparelho de precisão. Os erros encontrados podem ter sido
provocados pela precisão inferior dos filtros polarizadores utilizados no protótipo
bem como a analise não foi feita em ambiente climatizado a 25°C.
Na terceira análise foi verificado o comportamento do plano de polarização da
luz ao passar por 30g de sacarose diluída em 50g de água. Nesse caso a
sacarose apresentou uma rotação óptica de 60,3°, conforme a Figura 5.4.
46
Figura 5.4 – Curva de Sacarose
Em leituras analisadas com polarímetros comerciais a sacarose apresenta uma
variação de 68° no plano polarizado da luz.
Para se obter resultados precisos e satisfatórios quando se trata de
polarimetria é necessário realizar medições em laboratórios climatizados e com
medidas precisas de concentração e densidade das substâncias. A utilização de
filtros polarizadores precisos também são essenciais para uma análise satisfatória.
47
6. Conclusão
Este trabalho buscou inicialmente introduzir o conceito de polarização da
luz e como esta pode ser útil na análise de substâncias químicas. O polarímetro
desenvolvido teve como finalidade explorar esses conceitos com a utilização de
componentes de baixo custo, uma vez que polarímetros digitais comerciais
possuem um custo elevado.
O protótipo desenvolvido verificou uma diferença entre os ângulos do plano
polarizado de um feixe de luz após passar por glicose e sacarose diluídas. Foi
possível verificar que houve uma rotação óptica provocada pelas substancias,
porém algumas limitações do polarímetro como a falta de precisão nos filtros
polarizadores, comprometeram a precisão nos resultados obtidos.
O aparelho apresenta um erro de aproximadamente 10% que pode ser
reduzido se a análise for feita em um laboratório climatizado à 25°C e os filtros
polarizadores forem de maior precisão.
48
7. Estudo de Viabilidade Técnica - Econômica
Tabela 7.1 - Estudo de Viabilidade Técnica – Econômica
COMPONENTE
QUANTIDADE
Motor de passo
1
Filtro Polarizador
2
Microcontrolador
1
Sensor de temperatura
1
Fotodiodo
1
Conversor A / D
1
Placa da arquitetura 8031
1
Componentes Discretos
40
Software C++ Builder 6
1
Mecânica
1
Hora de Trabalho
650
TOTAL
CUSTO
EM R$
20,00
80,00
8,00
5,90
19,00
8,00
10,00
20,00
1800,00
100
10
TOTAL PARCIAL EM
R$
20,00
160,00
8,00
5,90
19,00
8,00
10,00
20,00
2670,5
100,00
6500,00
9520,9
49
8. Cronograma de Desenvolvimento
Figura 8.1 - Cronograma de desenvolvimento
50
9. Referências Bibliográficas
HALLIDAY, D. Fundamentos de Física 4, Ótica e Física Moderna, Rio de
Janeiro: LTC, 1991.
NICOLOSI, D. Microcontrolador 8051 Detalhado, São Paulo: Érica LTDA,
2000.
EWING, G. W. Métodos Instrumentais de Análise Química. Vol. I, Ed da
USP, SP, 1977.
PERTENCE A. J. Amplificadores operacionais e filtros ativos: teoria,
projetos, aplicações e laboratório, São Paulo : MAKRON , c1996
ERICSSON. Stepper Motor
Basics.http://www.solarbotics.net/library/pdflib/pdf/motorbas.pdf. Consultado
em 27/04/2006
MICROCHIP TECHNOGOLY INC. Stepping Motors Fundamentals.
http://ww1.microchip.com/downloads/en/AppNotes/00907a.pdf.Consultado
em 27/04/2006
NATIONAL SEMICONDUCTOR
http://cache.national.com/ds/DC/ADC0808.pdf . Consultado em 15/05/2006
NATIONAL SEMICONDUCTOR
http://cache.national.com/ds/LM/LM35.pdf. Consultado em 15/05/2006
BURR-BROWN
http://pdf1.alldatasheet.com/datasheet-pdf/view/56811/BURRBROWN/OPT101.html . Consultado em 05/06/2006
51
10. Anexos
52
10.1 Esquemáticos
Figura 10.1 - Kit didático para microcontrolador 8031
53
Figura 10.2 – Conversor ADC0808
54
VCC
U1
2
4
C1
1
3
8
0.01uF
-IN
OUT
5
FD
FB
VS
-V
COM
OPT101
Figura 10.3 – Esquemático do fotodiodo
1
VIN
VOUT
ADJ
LM350/TO
2
1K
3 +
1
2 -
TEMP
LM324
11
3
U2A
4
U1
9K
VCC
Figura 10.4 – Esquemático do sensor de temperatura
55
Figura 10.5 – Interface do motor de passo
56