SERIAL - SCA-04
MANUAL
DA
COMUNICAÇÃO SERIAL
SERVOCONVERSOR CA SÉRIE SCA -04
SOFTWARE : V3.XX
REVISÃO: 05/2001
1
SERIAL - SCA-04
CUIDADO
?? Ler o Manual do Servoconversor na íntegra, antes de instalar ou operar o mesmo.
?? Seguir atentamente os cuidados e avisos de segurança contidos nele.
?? Quando houver possibilidade de danos a pessoas ou equipamentos, relacionados a motores
acionados por servoconversores, prever dispositivos de segurança eletromecânicos.
AVISO
?? Seguir atentamente os cuidados definidos neste manual, no que diz respeito aos cabos de
interconexão das duas interfaces para comunicação serial.
?? Equipamento com componentes sensíveis à eletricidade estática. Os cartões eletrônicos
devem ser manuseados com os seguintes cuidados :
?? Não tocar com as mãos diretamente sob re componentes ou ligações (conectores). Quando
necessário tocar antes em um objeto metálico aterrado.
?? Utilizar ferro de solda com ponteira aterrada.
CONTEÚDO
?? Protocolo Weg Bus : capítulo 1 a 5
?? Protocolo TP-02 – SCA-04 (Somente na versão especial VE3.12) : capítulo 6
2
PROTOCOLO WEG BUS
1.
INTRODUÇÃO :
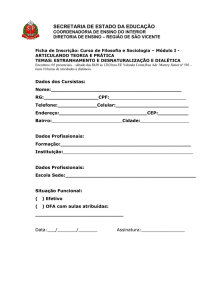
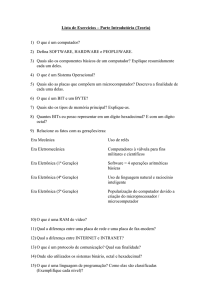
O objetivo básico da comunicação serial é a ligação física dos servoconversores numa rede
de equipamentos configurada da seguinte forma :
MESTRE
ESCRAVO 1
(Servoconversor 1)
PC, CLP, etc
ESCRAVO 2
(Servoconversor 2)
ESCRAVO N
(Servoconversor N)
N <=30
Os servoconversores possuem um software de controle da transmissão/recepção de dado s
pela interface serial, de modo a possibilitar o recebimento de dados enviados pelo mestre e o
envio de dados solicitados pelo mesmo.
A taxa de transmissão pode atingir um máximo de 9600 bits/s, seguindo um protocolo de
troca, tipo pergunta/resposta utili zando caracteres ASCII.
O mestre terá condições de realizar as seguintes operações relacionadas a cada
servoconversor :
?? IDENTIFICAÇÃO:
??Tipo de equipamento (Conversor, Servoconversor, Soft -Starter)
??Endereço do servoconversor na rede
??Leitura de erros
?? LEITURA DE PARÂMETROS :
Exemplos :
??Número na rede
??Versão de software
?? ALTERAÇÃO DE PARÂMETROS :
Exemplos:
??Habilitação
??Função Stop
Exemplos típicos de utilização da rede:
?? PC (mestre) para parametrização de um ou vários servoconversores ao mesmo tempo;
?? SDCD monitorando variáveis de servoconversores;
?? CLP controlando a operação de um servoconversor num processo industrial.
2.
DESCRIÇÃO DAS INTERFACES :
O meio físico de ligação entre os servoconversores e o mestre da rede segue o padrão RS 232 (ponto-a-ponto até 10m);
2.1.
RS-232 :
Neste caso temos a ligação de um mestre a um servoconversor (ponto -a-ponto).
Podem ser trocados dados na forma bidirecional, porém não simultânea (HALF DUPLEX).
Os níveis lógicos seguem a EIA STANDARD RS -232C, a qual determina o uso de sinais não
balanceados.
3
PROTOCOLO WEG BUS
No caso presente, utiliza-se um fio para transmissão (TX), um para recepção (RX) e um
retorno (0V).
Esta configuração trata-se, portanto, da configuração mínima a três fios (three wire economy
model).
2.2.
ENDEREÇOS:
Tabela 1: Endereços
Endereço
ASCII
0
@
1
A
2
B
3
C
4
D
5
E
6
F
7
G
8
H
9
I
10
J
11
K
12
L
13
M
14
N
15
O
Endereço
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
ASCII
P
Q
R
S
T
U
V
W
X
Y
Z
[
\
]
^
_
Obs: Endereços para executar tarefas especiais
?? Endereço 0 (CUIDADO): Qualquer servoconversor da rede é consultado, independentemente
de seu endereço. Deve-se ter apenas 1 (um) servoconversor ligado a rede (ponto -a-ponto)
para que não ocorram curto-circuitos nas linhas de interface.
?? Endereço 31: Um comando pode ser transmitido simultaneamente para todos os
servoconversores da rede, sem reconhecimento de aceitação
IMPORTANTE:
O mestre deverá transmitir o mesmo endereço contido no parâmetro referente ao ao
“Endereço do Servoconversor na Rede” (P055) para que haja a comunicação.
Caso este parâmetro se encontre num valor diferente de 1 a 30, ou seja, em 0 (“Off” na IHM)
significa que a comunicação serial está desabilitada, vide manual do SCA -04.
3.
DEFINIÇÕES :
Os ítens deste capítulo descrevem o protocol o utilizado para comunicação serial.
3.1.
TERMOS UTILIZADOS :
?? Parâmetros: são aqueles existentes nos servoconversores cuja visualização ou alteração é
possível através da interface homem máquina (IHM).
?? Variáveis básicas : são aquelas que somente podem ser acessadas através da serial
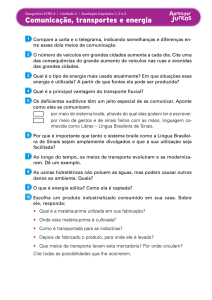
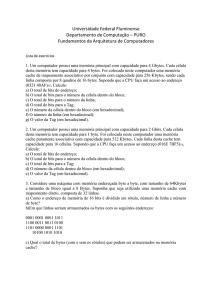
ESQUEMATICAMENTE:
4
PROTOCOLO WEG BUS
SERVOCONVERSOR
VARIÁVEIS BÁSICAS
LIGAÇÃO SERIAL
PARÂMETROS
MESTRE
VARIÁVEIS
3.2.
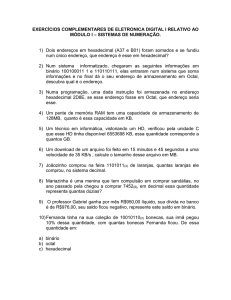
FORMATO DOS CARACTERES :
Dependendente do parâmetro referente a “Opção Protocolo Serial” (P048):
?? P048 = 0000 – Padrão de Fábrica
??1 start bit;
??8 bits ? os 7 primeiros bits são de informação e o últ imo bit de paridade par
??1 stop bit;
?? P048 = 0001
??1 start bit;
??8 bits ? os 8 bits são de informação, não havendo bit de paridade
??1 stop bit;
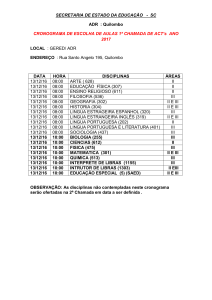
Após o start bit, segue o bit menos significativo :
START
START
BIT
B1
B2
B3
B4
B5
B6
B7
B8
?? 7 BITS DE INFORMAÇÃO + 1 DE
PARIDADE PAR (P048 = 0000)
?? 8 BITS DE INFORMAÇÃO, SEM
BIT DE PARIDADE (P048 = 0001)
STOP
STOP
BIT
3.4.
PROTOCOLO :
O protocolo de transmissão segue a norma ISO 1745 para transmissão de dados em código.
São usadas somente seqüências de caracteres de texto sem cabeçalho.
Se o parâmetro de “Opção Protocolo Serial” (P048) estiver em 0000 (Padrão de Fábrica), a
monitoração dos erros é feita através de transmissão r elacionada a paridade dos caracteres
individuais de 7 bits, conforme ISO 646. A monitoração de paridade é feita conforme DIN 66219
(paridade par).
São usados dois tipos de mensagens (pelo mestre) :
?? TELEGRAMA DE LEITURA : para consulta do conteúdo das variá veis dos servoconversores;
?? TELEGRAMA DE ESCRITA : para alterar conteúdo das variáveis dos servoconversores.
Não é possível uma transmissão entre dois servoconversores.
O mestre tem o controle do acesso ao barramento.
3.4.1. Telegrama de leitura :
Este telegrama permite que os mestre receba do servoconversor o conteúdo
correspondente ao código da solicitação.
No telegrama de resposta o servoconversor transmite os dados solicitados pelo mestre.
5
PROTOCOLO WEG BUS
MESTRE:
EOT ADR
ENQ
CÓDIGO
SERVOCONVERSOR:
ADR STX
=
CÓDIGO
ETX BCC
VAL
TEXTO
Formato do telegrama de leitura
EOT : caracter de controle End Of Transmission (= 04 hexa);
ADR : endereço do servoconversor (ASCII @, A, B, C, ... ? ver Tabela 1);
CÓDIGO : endereço da variável (5 dígitos codificados em ASCII, ver Item 3.6);
ENQ : caracter de controle ENQuiry (solicitação) (= 05 hexa);
Formato do telegrama de resposta do servoconversor
ADR: 1 caracter ASCII (ver Tabela 1) - endereço do servoconversor;
STX: caracter de controle - Start of TeXt (= 02 hexa);
TEXTO: consiste em:
?? CÓDIGO: endereço da variável (5 caracteres em ASCII ? ver Item 3.6);
?? " = ": caracter da separação (caracter em ASCII);
?? VAL: valor em 4 dígitos HEXADECIMAIS (Cada uma das quatro VALs corresponde a um
número de 0 a F em Hexadecimal);
?? ETX : caracter de controle - End of TeXt (= 03 hexa);
BCC : Byte de CheCksum - EXCLUSIVE OR de todos os bytes entre STX (excluído) e ETX
(incluído), ou seja, de todos os bytes pertencentes ao TEXTO. O resultado do BCC ficará
compreendido num valor entre 0 e F em hexadecimal.
OBS.: Em alguns casos poderá haver uma resposta do servoconversor co m :
ADR NAK
NOTA:
Ver ítem 3.5
Se o mestre enviar o endereço “@” (ver Ítem 2.2) no telegrama ADR, o servoconversor
responderá o valor do endereço que o servoconversor se encontra na rede no
telegrama ADR.
3.4.2. Telegrama de escrita:
Este telegrama envia dados para os par âmetros dos servoconversores. O servoconversor
irá responder indicando se os dados foram aceitos ou não.
NOTA:
Para a escrita de dados em parâmetros, é necessário que a senha (P006 ou) esteje
setado corretamente.
6
PROTOCOLO WEG BUS
MESTRE:
EOT ADR STX
=
CÓDIGO
ETX BCC
VAL
TEXTO
SERVOCONVERSOR:
ADR ACK
OU
ADR NAK
Formato do telegrama de escrita
EOT: caracter de controle End Of Transmission (= 04 hexa);
ADR: endereço do servoconversor ( ASCII @, A, B, C, ... ? ver Tabela 1);
STX: caracter de controle Start of TeXt (= 02 hexa);
TEXTO : consiste em:
?? CÓDIGO : endereço da variável (5 caracteres em ASCII ? ver Item 3.6);
?? " = ": caracter de separação (caracter em ASCII);
?? VAL : valor em 4 dígitos HEXADECIMAIS (Cada uma das quatro VALs corresponde a um
número de 0 a F em Hexadecimal);
?? ETX : caracter de controle End of TeXt (= 03 hexa);
BCC : Byte de CheCksum - EXCLUSIVE OR de todos os bytes entre STX (excluído) e ETX
(incluído), ou seja, de todos os bytes pertencentes ao TEXTO. O resultado do BCC ficará
compreendido num valor entre 0 e F em hexadecimal.
Formato do telegrama de resposta do servoconversor
?? Aceitação:
ADR: endereço do servoconversor (ASCII@, A, B, C, ... ? ver Tabela 1);
ACK: caracter de controle ACKnowledge (= 06 hexa);
?? Não aceitação:
ADR: endereço do servoconversor;
NAK: caracter de controle Not AcKnowledge (= 15 hexa). Isso significa que os da dos não
foram aceitos e a variável endereçada permanece com o seu valor antigo.
NOTA:
3.5.
Se o mestre enviar o endereço “@” (ver Ítem 2.2) no telegrama ADR, o servoconversor
responderá o valor do endereço que o servoconversor se encontra na rede no
telegrama ADR.
EXECUÇÃO E TESTE DE TELEGRAMA :
Os servoconversores e o mestre testam a sintaxe do telegrama.
A seguir são definidas as respostas para as respectivas condições encontradas:
?? Telegrama de leitura:
- sem resposta : com estrutura do telegrama errada, caracteres de controle recebidos errados
ou endereço do servoconversor errado;
- NAK: CÓDIGO correspondente à variável inexistente;
- TEXTO: com telegramas válidos;
?? Telegrama de escrita:
- sem resposta: com estrutura do telegrama errada, caracteres de controle recebidos errados
ou endereço do servoconversor errado;
7
PROTOCOLO WEG BUS
- NAK: com código correspondente à variável inexistente, BCC (byte de checksum) errado,
variável só de leitura, VAL fora da faixa permitida para a variável em questão, tentativa de
escrita quando a senha (P006) não está setada corretamente.
- ACK: com telegramas válidos; O mestre deve manter entre duas transmissões de variáveis
para o mesmo servoconversor, um tempo de espera compatível com o servoconversor
utilizado.
3.6.
CÓDIGOS DE VARIÁVEIS :
O campo denominado de CÓDIGO contém o endereço de parâmetros e variáveis básicas
composto de 5 dígitos (todos em ASCII) de acordo com o seguinte :
CÓDIGO:
X
X
X
X
X
número da variável básica ou parâmetro
número do equipamento: “=” : SCA-04 ou
“9”: qualquer equipamento
especificador:
0 = variáveis básicas ? caracter 0
1 = P000 a P099 ? caracter 1
2 = P100 a P199 ? caracter 2
igual a zero (0) ? caracter 0
Obs: No código referente ao número do equipamento, preferencialmente optar pelo caracter “=”
que indica que o equipamento é SCA-04. No entanto, o caracter “9” é válido para todas as
instruções.
4.
EXEMPLOS DE TELEGRAMAS :
?? Alteração da senha (P006) no servoconversor 7.
(Supondo que P006 = 0000)
MESTRE:
EOT
G
STX
0
1
=
0
6
=
0
CÓDIGO
0
VAL
TEXTO
SERVOCONVERSOR:
ADR ACK
?? Leitura da velocidade do servoconversor 10
(supondo P002 = 2000 rpm no momento da consulta).
0
0
ETX
1
8
PROTOCOLO WEG BUS
MESTRE:
EOT
J
0
1
=
0
2
ENQ
0
2
=
CÓDIGO
SERVOCONVERSOR:
J
STX
0
1
=
0
7
CÓDIGO
D
0
ETX
A
VAL
TEXTO
5.
VARIÁVEIS E ERROS DA COMUNICAÇÃO SERIAL (SCA-04)
5.1. VARIÁVEIS BÁSICAS:
V00 (código: 00900 ou 00=00) – Indicação do modelo de equipamento (variável de
leitura)
O código do servo
MESTRE:
EOT ADR
0
0
9
0
0
ENQ
0
0
=
CÓDIGO
SERVOCONVERSOR:
ADR STX
0
0
9
CÓDIGO
0
0
0
D
ETX
A
VAL
TEXTO
OBS.:
O mestre envia o código 00900, onde:
?? 0 ? 1º telegrama: sempre igual a “0” (ASCII)
?? 0 ? 2º telegrama: código do especificador ? variável básica
?? 9 ? 3º telegrama: número do equipamento ? qualquer equipamento
?? 00 ? 4º e 5º telegrama: número da variável básica ? V00
5.1.2. V02 (código 00=02) – Indicação do erro do serovoconversor (variável de leitura):
Val =
Byte high
? 00 sem erro
? 80 com erro
Val = Byte low ? código do erro (valor em hexadecimal)
9
PROTOCOLO WEG BUS
MESTRE:
EOT ADR
0
0
=
0
2
ENQ
0
2
=
CÓDIGO
SERVOCONVERSOR:
ADR STX
0
0
=
8
0
CÓDIGO
1
6
ETX
E
VAL
TEXTO
OBS.:
O mestre envia o código 00=02, onde:
?? 0 ? 1º telegrama: sempre igual a “0” (ASCII)
?? 0 ? 2º telegrama: código do especificador ? variável básica
?? = ? 3º telegrama: número do equipamento ? SCA-04
?? 02 ? 4º e 5º telegrama: número da variável básica ? V02
Neste exemplo o servoconversor informa que existe um erro através do 80 (byte high) e o
seu valor é 06 (byte low), que é o código de defeito externo.
5.1.3. V11 (código 00=11) – Indicação da stop-plus (variável de leitura):
Valor retornado:
0000: indica que o eixo está parado (posicionamento efetuado)
0001: indica que o eixo está em movimento (posicioname nto em andamento)
OBS.: Só é utilizada no modo posicionamento (P28=2)
MESTRE:
EOT ADR
0
0
=
1
1
ENQ
CÓDIGO
SERVOCONVERSOR: (Se eixo parado)
ADR STX
0
0
=
1
1
=
0
CÓDIGO
0
0
0
ETX
3
0
1
ETX
2
VAL
TEXTO
MESTRE:
EOT ADR
0
0
=
1
1
ENQ
CÓDIGO
SERVOCONVERSOR: (Se eixo girando)
ADR STX
0
0
=
1
1
=
CÓDIGO
0
0
VAL
TEXTO
10
PROTOCOLO WEG BUS
5.2.
PARÂMETROS DA COMUNICAÇÃO SERIAL:
5.2.1. A velocidade de transmissão (bit/segundo) é fixa em 9600bps.
5.2.2. Endereço do servoconversor na rede de comunicação serial. Faixa de valores 1 a 30.
5.3.
ERROS RELACIONADOS A COMUNICAÇÃO SERIAL :
Operam da seguinte forma:
* não provocam bloqueio do servoconversor;
* informam no display e na palavra de estado lógico.
# Tipos de erros:
• E22 : erro de paridade longitudinal (BCC);
• E25 : variável inexistente:
• E26 : valor desejado fora dos limites permitidos;
• E27 : tentativa de escrita em variável só de leitura.
• E28 : tentativa de escrita em variável quando a senha não está setada corretamente.
OBS:
Caso P048 = 0000 (Opção protocolo seria = 7 bits com paridade) e seja detectado erro
de paridade, na recepção de dados pelo servoconversor, o telegrama será ignorado.
O mesmo acontecerá para casos em que ocorram erros de sintaxe.
Ex.: Valores do código diferentes dos números 0,...,9.
Caracter de separação diferente de " = " .
etc.
Os erros que causam bloqueio no servoconversor, conforme manual, também podem ser
lidos pela variável básica V02, ou ainda, através do parâmetro P001 (indicação de defeito).
11
PROTOCOLO TP - SCA
6.
PROTOCOLO DE COMUNICAÇÃO SERIAL ENTRE O TP E O SCA
6.1. INFORMAÇÕES IMPORTANTES
?? Caso o modo de operação do servoconversor esteje configurado para a opção com placa
POS-01 (P028 = 0003), este protocolo não é válido. Neste caso, o protocolo Weg Bus fica
ativo.
?? Só é possível ler ou escrever em até 6 parâmetros e/ou variáveis básicas por vez.
?? Independente do valor contido no parâmetro que seleciona o protocolo de comunicação serial
(P048), a serial está configurada para 9600 bps, 8 bits de dados sem paridade e 1 stop bit.
6.2. LEGENDA
?? STX: Byte de “Start of Transmition”
Valor: 0x02 (hexadecimal); 2 (decimal); <Ctrl>+’B’ (ASCII)
?? ETX: Byte de “End of Transmition”
Valor: 0x03 (hexadecimal); 3 (decimal); <Ctrl>+’C’ (ASCII)
?? ADR: Byte do endereço do servoconversor na rede
Faixa de Valores: 0x41 (hexadecimal); 65 (decimal); ‘A’ (ASCII) ... 0x5E (hexadecimal); 94
(decimal); ‘^’ (ASCII) ? Representam os valores de 1 ... 30 programados no parâmetro do
endereço do servo na rede (P055) do servoconversor respectivamente.
Especial 1: 0x40 (hexadecimal); 64 (decimal); ‘@’ (ASCII) ? Permite escrita ou leitura de
todos os equipamentos conectados a rede. IMPORTANTE: Se houver 2 ou mais
equipamentos conectados a rede, curto -circuitos podem ser gerados, ocasionando a queima
da porta serial dos equipamentos conectados.
Especial 2: 0x5F (hexadecimal); 95 (decimal); ‘_’ (ASCII) ? Permite SOMENTE escrita em
todos os equipamentos conectados a redem sem resposta de aceitação ou rejeição.
NOTA: Se o valor contido no parâmetro do endereço do servo na rede (P055) for “Off”,
significa que a comunicação serial do servo está desabilitada.
?? COD: Byte do Código do Telegrama
Leitura: 0x3C (hexadecimal); 60 (decimal); ‘<’ (ASCII)
Escrita: 0x3E (hexadecimal); 62 (decimal); ‘>’ (ASCII)
?? BCC: Byte de Checksum longitudinal do telegrama, ou seja, OU E XCLUSIVO entre todos os
bytes do telegrama
Tamanho: 1 byte [0x00 ... 0xFF (hexadecimal)]
?? DMW: “Data Master Write”. São 4 bytes de escrita que o mestre envia ao escravo, sendo que
os 2 primeiros representam o parâmetro e/ou a variável básica e os 2 últimos o valor a ser
escrito neste parâmetro.
PHi: Byte representando a parte alta do parâmetro
PLo: Byte representando a parte baixa do parâmetro
VHi: Byte representando a parte alta do valor a ser escrito
VLo: Byte representando a parte baixa do valor a ser esc rito
Exemplo: Escrever 2000 rpm na referência de velocidade (P015) ? PHi = 0x00 (hexadecimal),
PLo = 0x0F (hexadecimal), VHi = 0x07 (hexadecimal), VLo = 0xD0 (hexadecimal).
?? DMR: “Data Master Read”. São 2 bytes de leitura que o mestre envia ao escravo que
representam o parâmetro a ser lido.
PHi: Byte representando a parte alta do parâmetro
PLo: Byte representando a parte baixa do parâmetro
Exemplo: Ler o valor contido no parâmetro do sentido de giro (P027) ? PHi = 0x00
(hexadecimal), PLo = 0x1B (hexadecimal) .
?? NUM: Byte que representa o número de DMW ou DMR a serem transmitidos, conforme o COD
do telegrama.
Faixa de Valores: 1 ... 6 (decimal)
?? DSV: “Data Slave Value”. São 2 bytes que o escravo envia ao mestre após uma solicitação de
um telegrama de leitura do mestre, representando o valor contido no parâmetro solicitado.
VHi: Byte representando a parte alta do valor a ser escrito
12
PROTOCOLO TP - SCA
VLo: Byte representando a parte baixa do valor a ser escrito
Exemplo: Resposta a solicitação de leitura do parâmetro de habilitação (P 007) ? VHi = 0x00
(hexadecimal), VLo = 0x01 (hexadecimal), informando que o servoconversor está habilitado.
?? ACK: Byte de aceitação do escravo após uma escrita do mestre
Valor: 0x06 (hexadecimal); 6 (decimal); <Ctrl>+’F’ (ASCII)
?? NAK: Byte de rejeição do escravo após uma leitura ou escrita do mestre. Pode ocorrer quando
o mestre solicita uma escrita ou leitura de um parâmetro inexistente, o valor a ser escrito no
parâmetro está fora da faixa de valores permitida, ou a senha (P006 ou P067, conforme o
parâmetro) não está setada corretamente.
Valor: 0x15 (hexadecimal); 21 (decimal); <Ctrl>+’U’ (ASCII)
6.3. PROTOCOLO
6.3.1. Telegrama de Leitura
MESTRE:
STX
ADR
COD
NUM DMR
...
DMR
ETX
BCC
??O número de DMRs deve ser igual ao valor configurado no byte NUM.
??COD: para leitura ? 0x3C (hexadecimal); 60 (decimal); ‘<’ (ASCII)
??NUM: faixa ? 1 ... 6
ESCRAVO:
ADR
DSV
...
DSV
BCC
ou
ADR
NAK
O número de DSVs é igual ao valor configurado no byte NUM
LEMBRANDO QUE:
DMR
PHi
DSV
PLo
VHi
VLo
6.3.2. Telegrama de Escrita
MESTRE:
STX
ADR
COD
NUM DMW
...
DMW ETX
BCC
??O número de DMRs deve ser igual ao valor configurado no byte NUM.
??COD: para leitura ? 0x3e (hexadecimal); 62 (decimal); ‘>’ (ASCII)
??NUM: faixa ? 1 ... 6
ESCRAVO:
ADR
ACK
ou
ADR
NAK
LEMBRANDO QUE:
DMW
PHi
PLo
VHi
VLo
6.4. VARIÁVEIS BÁSICAS
As variáveis básicas são lidas da mesma maneira que os parâmetros. A diferença é que é
13
PROTOCOLO TP - SCA
necessário somar 10.000 (hexadecimal) ao seu valor, ou seja, se for:
?? VB00 = Parâmetro 10.000
PHi: 0x27 (hexadecimal)
PLo: 0x10 (hexadecimal)
?? VB02 = Parâmetro 10.002
PHi: 0x27 (hexadecimal)
PLo: 0x12 (hexadecimal)
?? VB11 = Parâmetro 10.011
PHi: 0x27 (hexadecimal)
PLo: 0x1B (hexadecimal)
Para conhecer a função de cada variável básica, veja o capítulo 5.1
6.5.
EXEMPLOS
Todos os bytes dos telegramas estão no formato
(a) Ler os parâmetros P027 e P028, como o servoconversor configurado no endereço 30 da rede
(P055=0030).
MESTRE:
0x02
0x5E
0x3C
0x02
STX
ADR
COD
NUM
0x00
0x1B
0x00
0x1C
DMR
DMR
Parâmetro
Parâmetro
0x03
0x66
ETX
BCC
ESCRAVO:
0x5E
0x00
ADR
0x01
0x00
0x01
DSV
DSV
Valor
Valor
0x5E
BCC
(b) Escrever P052=0512, P018=1000 e P019=0010, com o servoconversor configurado no
endereço 1 da rede (P055=0001). hexadecimal.
MESTRE:
0x02
0x41
0x3E
0x03
STX
ADR
COD
NUM
0x00
0x34
0x02
0x00
DMW
Parâmetro
0x00
0x12
0x03
0xE8
DMW
Valor
Parâmetro
0x00
0x13
0x00
0x0A
DMW
Valor
Parâmetro
Valor
ESCRAVO:
0x41
0x06
ADR
ACK
(c) Ler a VB02, como o servoconversor configurado no endereço 2 da rede (P055=0002).
0x03
0xAB
ETX
BCC
14
PROTOCOLO TP - SCA
MESTRE:
0x02
0x42
0x3C
0x01
STX
ADR
COD
NUM
0x00
0x02
DMR
0x03
0x7C
ETX
BCC
Parâmetro
ESCRAVO:
0x42
ADR
0x80
0x04
DSV
0xC6
BCC
Valor
6.6. ERROS DA COMUNICAÇÃO SERIAL
Além dos erros relacionados no capítulo 5.3, temos ainda:
# Tipos de erros:
• E22 : erro de paridade longitudinal (BCC);
• E23 : tentativa de escrita, enquanto dados ainda estão sendo salvos na e2prom. É
necessário esperar 10ms por parâmetro escrito antes da próxima escrita, ou seja,
numa tentativa de escrita de 6 parâmetros é necessário esperar 60ms.
• E25 : variável inexistente:
• E26 : valor desejado fora dos limites permitidos;
• E27 : tentativa de escrita em variável só de leitura.
• E28 : tentativa de escrita em variável quando a senha não está setada corretamente.
• E29 : se o valor de NUM é maior que 6