ADL 08
2.10 Não-linearidades
Ate aqui todos modelos de sistemas foram descritos aproximadamente por equações diferenciais
lineares, invariantes no tempo.
Um sistema linear possui duas propriedades:
• Superposição: se uma entrada r1 (t) gerar uma saída c1 (t) e uma entrada r2 (t) gerar uma saída c2 (t),
então uma entrada r1 (t) + r2 (t); produzirá uma saída c1 (t) + c2 (t).
• Homogeneidade: se uma entrada r1 (t) gerar uma saída c1 (t), então uma entrada A r1 (t) produzirá
uma saída A c1 (t).
A Fig. 2.45(a) é um sistema linear onde a saída é sempre metade da entrada, ou f{x) = 0,5x. Se uma
entrada de valor 1 produz uma saída de valor 1/2 e uma entrada de valor 2 produz uma saída de valor
1. Então, uma entrada com valor igual à soma das entradas originais, ou seja, 3, produziria uma saída
igual à soma das saídas individuais, isto é, 1,5. Observe que o mesmo não ocorre na Fig. 2.45(b)
Exemplos de não-linearidades físicas.
Linearização
Gerar aproximações lineares de sistemas não-lineares a fim de obter funções de transferência.
Etapas:
1.
Reconhecer o componente não-linear e escrever a equação diferencial não-linear.
2.
Linearizar a equação para valores pequenos do sinal de entrada em torno da solução de estado
estacionário, ou equilíbrio.
3.
Separar variáveis de Entrada, Saída e Intermediárias
4.
Calcular a Função de Transferência da partir das equações linearizadas
Exemplo:
Quando um pêndulo está em repouso, está em equilíbrio. O deslocamento angular é descrito por
uma equação diferencial não-linear, mas pode ser expresso por uma equação diferencial linear para
pequenas excursões em torno deste ponto de equilíbrio.
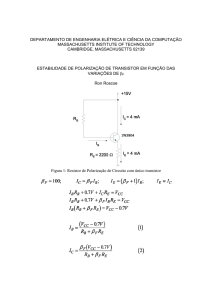
Se supusermos um sistema não-linear operando em um ponto A, [x0,,f{x0)] na Fig. 2.47, é possível
relacionar pequenas variações na entrada a variações na saída em torno do ponto por intermédio da
inclinação da curva no ponto A. Assim, se a inclinação da curva no ponto A for ma, então uma
pequena excursão da entrada em torno do ponto A, x acarreta pequenas variações na saída, f(x),
relacionado pela inclinação no ponto A. Portanto,
(2.178)
da qual
(2.179)
e
(2.180)
Exemplo 2.26
Linearizando uma função
Problema: Linearizar f(x) = 5 cos x em torno de x = /2
Solução:Série de Taylor em torno do ponto x0.
(2.181)
Para pequenas excursões de x em torno de x0, podemos desprezar os termos de ordem mais
alta,
na Eq. (2.181), obtemos
(2.182)
ou
(2.183)
Linearização da uma equação diferencial
Problema Linearizar a Eq. (2.184) para pequenas excursões em torno de x = /4.
(2.184)
Solução: o termo cos x toma esta equação não-linear. Como desejamos linearizar a equação em
torno de x = /4, fazemos x = x + /4, onde x é uma pequena excursão em torno de /4, e
substituímos x na Eq. (2.184):
(2.185)
Mas
e
Finalmente, o termo cos( x + /4) pode ser linearizado por meio de uma série de Taylor truncada.
(2.188)
Resolvendo a Eq. (2.l88) para cos( x + /4), obtemos
(2.189)
Substituindo asEqs. (2.186), (2.187) e (2.189) na Eq. (2.185), resulta a seguinte equação
diferencial linearizada:
(2.190)
Função de transferência: circuito elétrico não-linear
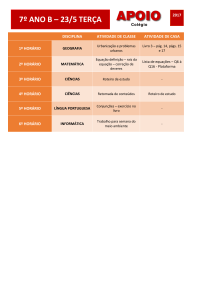
Problema Obter a função de transferência, VL(s)/V(s), para o circuito elétrico ao lado, onde v(t) é
uma fonte de pequenos sinais.
O resistor não-linear tem relação tensão-corrente definida por ir = 2e0,1Vr
Solução Da relação corrente-tensão do resistor, obtemos vr = 10 ln (ir /2)
A equação da malha, onde ir = i, resulta
(2.191)
Cálculo da solução de equilíbrio:
• Com v(t) = 0, o circuito consiste em uma bateria de 20 V em série com o indutor e com o resistor nãolinear.
• Em estado estacionário a tensão sobre o resistor, vr é 20 V.
• Usando a característica do resistor, ir = 2e0,1Vr, => ir = i0 = 14,78 A.
• Substituindo i = i0 + i. na Eq. (2.191), resulta:
(2.192)
Usando a Eq. (2.182):
(2.193)
(2.194)
Substituindo na Eq. (2.192), a equação linearizada se torna
(2.195)
Fazendo L = 1 e i0 = 14,78,
temos:
(2.196)
Aplicando a transformada de Laplace, supondo condições iniciais nulas,
(2.197)
Mas a tensão sobre o indutor em torno do ponto de equilíbrio é
(2.198)
Aplicando a transformada de Laplace,
(2.199)
Substituindo a Eq. (2.197) na Eq. (2.199), resulta
(2.201)
para pequenas excursões em torno de i = 14,78 ou, de forma equivalente, em torno de v(t) = 0.
Problema: Obter a função de transferência linearizada, G(s) = V(s)/I(s), para o circuito elétrico
mostrado na Fig. 2.50. O circuito contém um resistor não-linear cuja relação tensão-corrente é definida
por ir = evr. A fonte de corrente, i(t), é um gerador de pequeno sinal.
Resposta: