UM ESTUDO SOBRE A FRENAGEM REGENERATIVA DE TRENS UTILIZANDO GERADOR LINEAR DE INDUÇÃO
ADILSON M. TAVARES*, ÁLY F. FLORES FILHO**, JONAS O. M. OSÓRIO**, YEDDO B. BLAUTH**
* Instituto Federal de Educação, Ciência e Tecnologia Sul-rio-grandense
Praça Vinte de Setembro, 455 – Pelotas –RS – Brasil – CEP 96015-360
**Laboratório de Máquinas Elétricas, Acionamentos e Energia, Departamento de Engenharia Elétrica, Universidade Federal
do Rio Grande do Sul
Av. Osvaldo Aranha, 103 – Porto Alegre –RS – Brasil – CEP 90035-190
E-mails: [email protected], [email protected], [email protected],
[email protected]
Abstract¾ This paper presents a study about the use of linear induction generator for kinetic energy recovery of cargo trains, producing electricity
during the braking process. It describes the train and linear induction machine models, including the longitudinal end effect. The obtained results
from a MATLAB simulation program are presented. It analyzes the behavior of linear induction machine and train quantities, especially the
recovery percentage of train initial kinetic energy
Keywords¾ kinetic to electric energy conversion, regenerative braking, linear induction generator, train braking.
Resumo¾ Este artigo apresenta um estudo sobre a utilização do gerador linear de indução para aproveitamento da energia cinética de trens de
carga, produzindo energia elétrica durante o processo de frenagem. São descritos os modelos do trem e da máquina linear de indução, incluindo o
efeito longitudinal de extremidade. São apresentados os resultados obtidos de um programa de simulação implementado no MATLAB. Analisa-se o
comportamento de grandezas associadas à máquina linear de indução e ao trem, destacando-se o percentual de aproveitamento da energia cinética
inicial.
Palavras-chave¾ conversão de energia cinética em energia elétrica, frenagem regenerativa, gerador linear de indução, frenagem de trens.
casos, a energia cinética é convertida em calor
devido ao atrito. Um importante aspecto negativo da
frenagem por atrito é o elevado desgaste dos
componentes envolvidos (Martins, 1987; Barbosa,
1993).
Por outro lado, há genericamente três tipos de
frenagem elétrica para máquinas elétricas girantes
(El-Sharkawi, 2000; Ehsani, M. et al.; 2005):
frenagem regenerativa, frenagem dinâmica e
frenagem por contracorrente. Os dois primeiros tipos
citados são os mais utilizados em veículos. Nestes
dois casos, os motores elétricos de tração passam a
operar como geradores e convertem a energia
cinética do veículo em movimento em energia
elétrica. Os geradores produzem um conjugado em
sentido contrário ao da rotação, resultando em uma
força de frenagem para o veículo. A energia elétrica
gerada pode ser fornecida para o sistema elétrico de
alimentação (frenagem regenerativa), como no caso
de trens elétricos, ou dissipada em resistores
(frenagem dinâmica), como no caso de trens dieselelétricos.
A utilização da máquina elétrica linear como
gerador ainda é pequena. Das pesquisas na área,
pode-se destacar os trabalhos de Cawthorne (1999) e
Ghita et al. (2008). Ambos tratam de geradores
lineares síncronos, para aproveitamento de energia
das ondas do mar ou acionado por motor a
combustão, respectivamente.
1 Introdução
Atualmente, várias fontes alternativas de energia
são utilizadas para suprir a demanda crescente e para
atenuar os problemas ambientais decorrentes
principalmente do uso de combustíveis de origem
fóssil. Porém, além das fontes alternativas, há ainda a
possibilidade pouco explorada de utilizar a energia
cinética de diversos veículos que trafegam por
rodovias e ferrovias em todo o mundo.
O objetivo deste artigo é apresentar um estudo
sobre a utilização do gerador linear de indução para
produzir a frenagem de veículos acompanhada de
geração de energia para o sistema elétrico. O sistema
pode ser utilizado em qualquer tipo de veículo, mas é
particularmente útil para veículos que não possuem
conexão direta com um sistema externo de
alimentação elétrica, como por exemplo, trens e
ônibus. No caso sob estudo o veículo é um trem de
transporte de carga.
2 Estado da Arte
A frenagem por atrito está presente numa grande
quantidade de veículos, desde pequenos automóveis
até grandes trens de transporte de carga, com as
diferenças construtivas próprias de cada caso. Nestes
40
funcionando como uma resistência ao movimento.
Porém, nos trechos de declive esta componente
tangencial atua no mesmo sentido do movimento e,
em contradição com a sua nomenclatura, funciona
como uma força propulsora. A resistência de rampa
(em N) é expressa por:
3 Modelo do Trem
Para o desenvolvimento da simulação
computacional do sistema de frenagem é necessário o
conhecimento dos modelos matemáticos do trem e da
máquina linear de indução. Esta seção apresenta o
modelo dinâmico utilizado para o trem.
O movimento do trem ao longo da via pode ser
modelado de forma semelhante ao movimento do
ponto material com um grau de liberdade (Pires,
2002). Aplicando-se a Segunda Lei de Newton, temse:
(1)
d 2x
F =m 2
dt
Fi = mgi × 10 -3
sendo “g” a aceleração da gravidade e “ i ” a elevação
da via para 1000 m de comprimento horizontal.
Em função da inclinação da via, há outras
vantagens da utilização da máquina linear de indução
no transporte ferroviário. Pode ser utilizada para
reforço de propulsão dos trens em trechos onde há
aclives e, de forma inversa, nos casos de declives, há
também a possibilidade de frenagem controlada,
acompanhada de geração de energia elétrica.
A resistência ao rolamento é composta de três
parcelas: resistência nos mancais de rolamento,
resistência no contato dos flanges das rodas contra os
trilhos e resistência do ar. O modelo mais utilizado
para resistência do trem é conhecido como fórmula
de Davis (Pires, 2002). Neste caso, a força resistente
por unidade de massa (em kN/t) em cada veículo da
composição é expressa por:
å
onde “
å F ” é o somatório das forças que atuam no
trem, “ m ” é a sua massa total e “ x ” a posição do
mesmo em um sistema de referência fixo na via.
Para obtenção da solução numérica da equação
diferencial de segunda ordem, deve-se dividir a
mesma em duas equações diferenciais de primeira
ordem (Greenwood, 1988). Adota-se como variáveis
de estado a posição ( x1 = x ) e a velocidade do
veículo ( x 2 = v = dx / dt ).
Derivando-se as variáveis de estado em relação
ao tempo se obtém as duas equações diferenciais de
primeira ordem (equações de estado):
dx1 dx
=
=v
dt
dt
dx 2 d 2 x 1
= 2 =
dt
m
dt
åF
(5)
f t = A + Bv + Cv 2
(2)
(6)
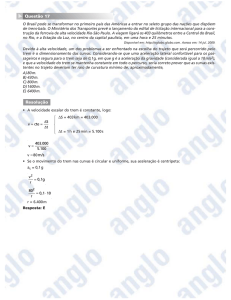
Os coeficientes A, B e C são determinados pelas
características construtivas de cada veículo da
composição ferroviária e estão apresentados na tabela
1 (Pires, 2002). O carro é para transporte de
passageiros e o vagão para transporte de carga.
(3)
A massa geralmente é acrescida de 2% a 30%
para levar-se em consideração a inércia dos
componentes girantes do trem como rodas, eixos e
rotores de motores (Pires, 2002).
Desconsiderando-se o freio mecânico, tem-se as
seguintes forças de resistência ao movimento do trem
(Barbosa, 1993; Pires, 2002): resistência de curva,
resistência de rampa e resistência ao rolamento;
além disso, há no caso, a força externa produzida
pelo máquina linear de indução.
A resistência de curva ocorre devido à
compressão do friso das rodas do trem contra a
lateral do trilho e também ao eventual arraste das
rodas. Esta resistência de curva (em kN) é expressa
por :
(4)
4,9bm
Fc =
r
Tabela 1. Coeficientes da fórmula de Davis
Veículo
B
[kN/(km/h)/t]
91,39780.10-6
C
[kN/(km/h)2/t]
Locomotiva
44,71883
.10-6S/(neme)
Carro
91,39780.10-6
6,33510
.10-6S/(neme)
Vagão
137,78343.10-6
9,26728
.10-6S/(neme)
Para todos os veículos: A=6,37432.10-3 +0.12896/me
[kN/t]; S=área da seção transversal; me=massa por
eixo; ne=número de eixos
A equação (6) é aplicada a cada veículo “j” e a
resistência total ao rolamento é obtida em função dos
“n” veículos que compõem o trem, sendo dada por:
n
onde “b” é a bitola da via, “ r ” é o raio de curvatura
e “m” é a massa do comboio.
A resistência de rampa existe devido à
componente do peso do trem que é paralela à direção
de seu movimento (componente tangencial). Nos
trechos de aclive, a componente tangencial do peso
atua em sentido contrário ao movimento,
Ft =
åf
tj m j
(7)
j =1
Além das forças mencionadas, há ainda a força
eletromagnética produzida pela máquina linear de
indução ( Fe ), que será apresentada na próxima
41
força é de frenagem, e a máquina opera como
gerador. Nos dois casos, a velocidade linear síncrona
e a velocidade do secundário possuem o mesmo
sentido, apenas os seus módulos são diferentes.
O campo magnético resultante das correntes do
primário e do secundário induz forças eletromotrizes
no enrolamento primário. Estas forças eletromotrizes
existem tanto na operação de gerador quanto na
operação de motor.
A potência reativa necessária para criação do
campo magnético viajante pode vir da própria rede
elétrica ou de um banco de capacitores em derivação
com o enrolamento primário, ou de ambos.
seção. Desprezando-se a força produzida pelos
motores rotativos de tração, tem-se que o somatório
das forças, a ser usado na equação (3), é dado por:
å F = ±F
e
± Fi - Fc - Ft
(8)
As duas primeiras forças do lado direito da
igualdade podem ser de propulsão ou de frenagem,
enquanto que as duas últimas são sempre de
frenagem.
4 Modelo da Máquina Linear de Indução
4.2 Aplicação para Frenagem regenerativa
4.1 Caracterização
Os motores lineares já são utilizados em vários
países em sistemas de transporte de massa (Duncan,
1983; Gieras 1994). Há casos de veículos de alta
velocidade, com levitação magnética, e também
veículos de baixa velocidade sobre trilhos. Para este
segundo caso, Gieras (1994) apresenta várias
possibilidades de utilização, sendo uma delas
apresentada na figura 2. O primário está fixo na via e
o secundário acoplado no veículo. A utilização de
máquinas lineares elétricas operando como
geradores, e instaladas na configuração apresentada
na figura 2 permite a frenagem por recuperação da
energia cinética e envio da energia elétrica gerada
para o sistema elétrico de potência.
A máquina linear de indução opera sob os
mesmos princípios da máquina de indução girante
convencional, porém, tem formato linear (Gieras,
1994; Boldea e Nasar, 1997). O estator é
denominado de primário, pois é ele que recebe
alimentação da fonte de energia reativa de excitação.
O rotor passa a ser denominado de secundário. A
figura 1 apresenta uma configuração de máquina
linear de indução de primário curto utilizada em
veículos de transporte. O primário (1) é composto
pelo núcleo ferromagnético e pelo enrolamento
polifásico, e o secundário é constituído por uma
lâmina de material condutor (2) e por um núcleo
ferromagnético (3).
Figura 1. Visualização inicial da máquina linear de indução
As correntes no primário, geralmente trifásico,
produzem um campo magnético viajante (de
translação), idealmente de distribuição senoidal, que
induz correntes elétricas no secundário.
A velocidade do campo magnético viajante é
denominada de velocidade linear síncrona (vs),
expressa, geralmente, em m/s. Ela depende do passo
polar (τ) e da freqüência (f), da seguinte forma
(Gieras, 1994; Boldea e Nasar, 1997):
v s = 2tf
Figura 2. Utilização de motor linear de indução em transportes
4.3 Circuito Equivalente
No caso em estudo, a dinâmica do sistema
mecânico é muito mais lenta do que a dinâmica do
sistema elétrico. Portanto, pode-se adotar o modelo
estático de circuito equivalente para a máquina de
indução (Pires, 2002).
O circuito equivalente do motor linear é parecido
com o do motor rotativo. Porém, para uma análise
mais realista, um fenômeno que deve ser levado em
consideração é o efeito longitudinal de extremidade,
que não existe nas máquinas rotativas (Duncan,
1983; Gieras, 1994).
Entre os vários modelos apresentados na
literatura técnica, optou-se por utilizar o modelo de
(9)
A velocidade do secundário ( v ) é diferente da
velocidade síncrona. Esta diferença é expressa pelo
escorregamento.
s = (v s - v ) / v s
(10)
A interação entre as correntes do secundário e o
campo viajante produz a força eletromagnética, que
pode ser de tração ou de frenagem, dependendo do
escorregamento. Para 0 < s £ 1 , a força é de tração,
ou seja, a máquina opera como motor; para s < 0 a
42
P1 = qV1 I 1 cos f
Duncan (1993). Esta escolha foi baseada nas
seguintes características:
- a máquina é usada num sistema de transporte em
Toronto, no Canadá;
- os resultados experimentais e os teóricos são muito
parecidos;
- modelo é de fácil aplicação;
- todos os parâmetros são obtidos a partir de ensaios,
não há necessidade de conhecimento de dados
internos de projeto;
- todos os parâmetros são claramente apresentados.
O circuito equivalente por fase está apresentado
na figura 3, onde se tem as seguintes grandezas:
R1 = resistência do primário; L1 = indutância de
dispersão do primário; Lm = indutância de
magnetização; R2 = resistência do secundário; L2 =
indutância de dispersão do secundário; V1 = tensão
nos terminais do primário; f = frequência de
excitação do primário.
A grandeza Q é adimensional e expressa por:
Q=
DR2
( L m + L2 ) v
(14)
sendo cos f o fator de potência.
A energia elétrica ativa é obtida por integração
da potência ativa durante todo o tempo de operação:
t
ò
E e = P1 dt
(15)
0
A energia cinética depende da massa total (do
secundário mais a do trem) e da velocidade:
Ec =
1
mv 2
2
(16)
5 Simulações
Considere-se a estrutura apresentada na figura 2
sendo utilizada para produzir a frenagem
regenerativa de um trem de transporte de carga com
as características apresentadas na tabela 2 (Pires,
2002).
(11)
sendo D o comprimento do núcleo primário.
Portanto, a resistência e a indutância associadas
ao ramo de excitação são variáveis com a velocidade,
assim como o fluxo de entreferro e as perdas do
ferro.
Com base no circuito equivalente, se pode
calcular todas as grandezas relacionadas ao
funcionamento da máquina (Gieras, 1994; Boldea e
Nasar, 1997).
Conhecendo-se a tensão nos terminais, a
frequência e o escorregamento, aplica-se a teoria de
circuitos elétricos para calcular todas as correntes.
Tabela 2. Dados do trem
Dados da locomotiva
Massa: 83 t; Seção transversal: 13,230 m2; Bitola:
1,435 m; Número de eixos motores: 4
Dados do vagão
Quantidade: 6; Massa: 47,044 t; Seção transversal:
12 m2; Número de eixos: 4
A máquina linear de indução possui as
características indicadas na tabela 3 (Duncan, 1993).
Em função da alta inércia do trem, são
necessárias máquinas ligadas em série (Gieras,
1994). Após várias simulações constatou-se que são
necessárias 8 máquinas para se produzir uma
frenagem satisfatória.
Tabela 3. Dados da máquina linear de indução
Comprimento do primário: 1,9 m; Largura do
primário: 0,216 m; Passo polar: 0,287 m; Número de
fases: 3; Número de pólos: 6; Espessura do núcleo
secundário: 3 mm; Lâmina condutora: Alumínio;
Espessura da lâmina: 4,5 mm; Entreferro: 17,1 mm
Parâmetros do circuito equivalente: R1=0,038 W ;
L1=0,00104 H; R2=0,109 W ; L2=0,0002 H;
Lm=0,00449 H
A excitação das máquinas é feita por um
conversor
de
frequência
regenerativo,
ou
bidirecional, com controle escalar, mantendo-se a
relação tensão/frequência constante. A frequência é
controlada de modo a manter o escorregamento
constante e negativo, para que as máquinas operem
como geradores.
O programa de simulação, implementado no
MATLAB, resolve as equações diferenciais e plota
as curvas. Todos os cálculos são executados com as
Figura 3. Circuito equivalente
A potência dissipada na resistência fictícia
dependente do escorregamento representa a potência
eletromagnética desenvolvida:
(12)
Pe = qI 22 R 2 (1 - s ) / s
onde q é o número de fases.
A força eletromagnética relaciona a potência
eletromagnética e a velocidade do secundário:
Fe = Pe / v
(13)
A potência ativa que flui entre o primário e a
fonte de alimentação é:
43
unidades das grandezas expressas no sistema
internacional. Apenas no momento de plotar as
curvas que a conversão é feita para outras unidades
mais convenientes para a análise.
A simulação foi desenvolvida com as seguintes
condições iniciais de posição e velocidade: x = 0 km
e v= 80 km/h. A pista é considerada sem inclinação e
sem curvatura.
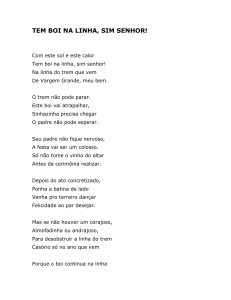
A figura 4 apresenta o comportamento da
velocidade, da posição e da aceleração do trem no
tempo. A figura também mostra a velocidade
síncrona, que permanece sempre menor do que a
velocidade do trem, o que caracteriza um
escorregamento negativo. A velocidade cai a zero em
aproximadamente 3 min. O trem desloca-se menos
do que 1 km até parar. Este valor está de acordo com
o que foi estabelecido por Martins (1999), segundo o
qual, os trens de carga param após percorrerem
distâncias relativamente longas, entre 500 e 1500 m.
A desaceleração é máxima em t = 0, atingindo
0,46m/s2 (negativa), e vai diminuindo à medida que o
trem perde velocidade. Segundo Iwnicki (2006), a
desaceleração típica de trens fica na faixa de 0,1 a 0,6
m/s2 (negativa).
internas no cobre e no ferro. Observa-se que para t
>1,25 min o rendimento torna-se nulo. O que está
ocorrendo a partir daí é que as perdas internas estão
consumindo integralmente a energia cinética
recuperada. Observa-se ainda que a potência ativa
torna-se positiva, ou seja, uma parte das perdas
também está sendo suprida pela fonte de
alimentação. Obviamente, a partir deste momento,
não é mais conveniente continuar com a máquina
excitada. A partir daí, a aplicação do freio mecânico
levará a velocidade à zero. Como a velocidade já está
reduzida, a solicitação do freio mecânico será
relativamente pequena.
Figura 5. Curvas de tensão, frequência e corrente no primário da
máquina linear de indução
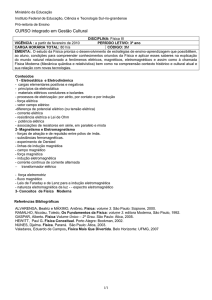
Na figura 7, estão apresentadas as curvas da
energia cinética do trem e da energia elétrica ativa
fornecida para a rede. A energia cinética inicial é
20kWh e vai diminuindo à medida que o trem perde
velocidade. Devido à ação do gerador linear, uma
parcela desta energia é recuperada, sendo fornecida
para a rede elétrica. A energia elétrica ativa atinge o
máximo valor num instante t de aproximadamente
1,25 min e a partir daí começa a diminuir, pela razão
já descrita anteriormente. Se a excitação for cortada
neste instante, tem-se a uma energia elétrica ativa
gerada igual a 12, 9 kWh. Portanto, o aproveitamento
da energia cinética é de 64,5 %.
Figura 4. Curvas de velocidade, posição e aceleração do trem
A figura 5 apresenta as curvas de tensão,
frequência e corrente no primário da máquina linear
de indução. Observa-se que as curvas de tensão e
frequência têm o mesmo formato. Isto ocorre devido
ao controle escalar com relação V1/f constante. A
corrente tem um pico inicial de 480 A e depois
diminui. Este pico é um pouco superior à corrente
nominal (465 A), porém, em menos de 5 s a corrente
já atinge o valor nominal, de forma que não há
aquecimento excessivo do enrolamento.
A figura 6 apresenta as curvas força
eletromagnética,
potência
ativa,
potência
eletromagnética e rendimento da máquina linear de
indução. Inicialmente, a força eletromagnética de
frenagem (negativa) está em torno de 125 kN, depois
vai diminuindo. A potência eletromagnética
associada à frenagem é negativa, ou seja, entregue à
máquina e daí convertida em potência elétrica ativa.
Porém, uma parcela da potência é consumida
internamente na máquina, devido às suas perdas
Figura 6. Curvas de força eletromagnética, potência ativa, potência
eletromagnética e rendimento da máquina linear de indução
44
Referências Bibliográficas
Barbosa, R. S. (1993). Estudo da Dinâmica
Longitudinal do Trem. Dissertação (Mestrado) –
Faculdade
de
Engenharia
Mecânica,
Universidade Estadual de Campinas, Campinas.
Boldea, I. and S. Nasar (1997). Linear Electric
Actuators and Generators. New York:
Cambridge University Press.
Cawthorne, W. R. (1999). Optimization of a
Brushless Permanent Magnet Linear Alternator
for Use With a Linear Internal Combustion
Engine. Tese (Doutorado) – Departament of
Computer Science and Eletrical Engineering,
West Virginia University, Morgantown.
Duncan, J. (1983). Linear Induction MotorEquivalent Circuit Model. IEE Proceedings, Part
B - Electric Power Applications, vol. 130, pt. B,
No. 1, pp. 51-57.
Ehsani, M. et al. (2005). Modern Electric, Hybrid
Electric, and Fuel Cell Vehicles: Fundamentals,
Theory and Design. Boca Raton: CRC Press.
El-Sharkawi, M. A. (2000). Fundamentals of Electric
Drives. Australia : Brooks/Cole.
Ghita, C. et al. (2008). Numerical Modeling of the
Electric Linear Generators Based on the Sea
Waves Energy. The 14th IEEE Mediterranean
Electrotechnical Conference; pp. 640-645.
Gieras, J. F. (1994). Linear Induction Drives. New
York: Oxford University Press.
Greenwood, D. T (1988). Principles of Dynamics.
Englewood Cliffs: Prentice-Hall.
Iwinicki, S. (2006). Handbook of Railway Vehicle
Dynamics. Boca Raton: CRC Press.
Martins, S. R. (1999). Simulação da Frenagem de
Trem Unitário de Carga. Dissertação (Mestrado)
– Faculdade de Engenharia Mecânica,
Universidade Estadual de Campinas, Campinas.
Pires, C. L. (2002). Simulação de Marcha de
Composição Ferroviária Acionada por Motores
de Indução e PWM. Dissertação (Mestrado) –
Escola Politécnica, Universidade de São Paulo,
São Paulo.
Figura 7. Curvas da energia cinética do trem e da energia elétrica
ativa fornecida para a rede
Contudo, deve se considerar que o trem não
possui um comprimento infinito e, por consequência,
o tempo de aplicação da frenagem regenerativa é
finito. Considerando um comprimento ativo do
secundário de 140 m, localizado em praticamente
toda a extensão do trem, tem-se uma energia elétrica
ativa de 3,9 kWh. Isto reduz o aproveitamento da
energia cinética para 19,5%.
6 Conclusões
Este artigo desenvolveu um estudo sobre a
frenagem regenerativa de trens com a utilização da
máquina linear de indução operando como gerador.
Apresentou-se o estado da arte, o modelo dinâmico
do trem, o modelo da máquina elétrica e os
resultados de um programa de simulação da operação
do sistema.
Os resultados obtidos demonstram que o sistema
apresenta boas características para aplicação. A
frenagem obtida foi eficiente, reduzindo a
necessidade de aplicação do freio mecânico. Isto
contribui para um menor desgaste do sistema
mecânico de frenagem. A energia recuperada ficou
um pouco abaixo de 20% da energia cinética inicial
do trem. Este aproveitamento parece inicialmente ser
pequeno, porém, se deve ter em mente que toda esta
energia recuperada seria perdida em forma de calor,
por atrito e nos resistores de dissipação.
Um fator limitante da recuperação de energia é o
comprimento do trem. Supondo-se um comprimento
infinito, a recuperação seria um pouco maior do que
60%. Observou-se também que em velocidades
muito baixas a energia cinética é totalmente
consumida pelas perdas internas da máquina.
A partir deste trabalho inicial, pretende-se
aprofundar o estudo teórico e desenvolver testes
práticos. Os próximos passos são os seguintes:
- construção de uma bancada de ensaios;
- desenvolvimento de outras técnicas de controle da
máquina;
- verificação da influência da força normal no
desempenho do sistema.
45