Princípios de Instrumentação Biomédica
Amplificadores Operacionais
Controle de Versões
2015
Versão 1 – Com base em outros textos
Última alteração: 21/07/15
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
Índice
4 Amplificador operacional ideal.......................................................................................................................3
4.1 Introdução....................................................................................................................................................3
4.2 Símbolo e Modelo.......................................................................................................................................4
4.3 Configurações realimentadas mais comuns........................................................................................7
4.3.1 Amplificador inversor.......................................................................................................................7
4.3.2 Amplificador não-inversor:...........................................................................................................10
4.3.3 Amplificador somador....................................................................................................................12
4.3.4 Amplificador subtrator...................................................................................................................12
4.3.5 Amplificador de instrumentação.................................................................................................15
4.4 Considerações práticas...........................................................................................................................18
4.5 Exercícios...................................................................................................................................................19
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
1
4 Amplificador operacional ideal
4.1 Introdução
Em instrumentação os sinais oriundos de sensores, transdutores ou de biopotenciais
costumam ser muito baixos. Isto os torna incompatíveis com os circuitos tradicionalmente
utilizados para ler estes sinais em um computador. Por esta razão costuma ser necessário
amplificá-los antes que eles sejam processados. Amplificar nada mais é do que multiplicar o sinal
por uma constante. Quando a constante é maior do que 1 ela é chamada de ganho, e quando ela é
menor do que 1 é chamada de atenuação. Também é muito comum interligar dispositivos para
produzir um novo instrumento de medida ou sistema de medição, neste caso os níveis de tensão e
corrente aceitos pelos diferentes dispositivos devem ser garantidos. Para isto os sinais
normalmente precisam ser amplificados, atenuados ou somados a alguma constante. Estes ajustes
corrigem ganhos e offsets e estes circuitos podem ser projetados facilmente por qualquer pessoa.
Neste capítulo estudaremos formas de amplificar, atenuar e somar sinais de forma eletrônica e
veremos quando e onde devemos utilizar estas ferramentas. O elemento básico para tais
procedimentos será o “amplificador operacional” (AO).
A origem do termo “operacional” vem dos antigos computadores analógicos, onde estes
amplificadores eram utilizados como elemento para a realização de operações matemáticas. O
nome “amplificador operacional” foi usado pela primeira vez em uma publicação de 1947, feita por
John Ragazzini, o qual descrevia as propriedades de circuitos capazes de amplificar a diferença
entre dois sinais analógicos. O artigo, que teve como base trabalhos anteriores, realizados entre
1943 e 1944, considerava as condições de realimentação linear e não-linear. Hoje em dia o AO é o
circuito integrado analógico mais utilizado.
Por ter sido projetado para ser versátil e funcionar em circuitos com realimentação
negativa este amplificador é construído com ganhos extremamente elevados. Tão elevados que na
maioria das vezes vamos considerar que seu ganho é infinito. O erro desta suposição é, na maioria
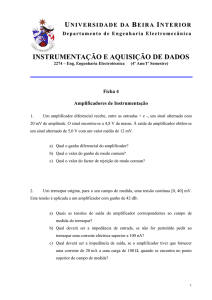
das vezes, desprezível. A figura a seguir mostra um diagrama com realimentação negativa. O
ganho do amplificador operacional está representado por Ad(S), Vi é o sinal de entrada e Vo o
sinal de saída. Uma malha de realimentação negativa é formada pelo bloco β(S). Em circuitos
práticos a realimentação é feita por resistores e capacitores. O conjunto completo forma um novo
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
2
amplificador com características e nomes próprios que vão depender da rede de realimentação,
como veremos mais adiante.
Vi
+
_
Ad(S)
Vo
b(S)
Considerando que cada bloco representa um ganho então
V O S = Ad S ⋅ V i S – V O S ⋅ S
e
V O S
Ad S
=AV S =
.
V i S
1 Ad S ⋅ S
Se o ganho Ad(S) (ganho diferencial ou ganho de malha aberta) for muito elevado, como no
caso do AO, o ganho da malha de realimentação, (S), é responsável pelo ganho do amplificador
realimentado.
V O S 1
=
V i S
Observa-se que, mesmo com o ganho infinito do AO a sua saída é finita e o ganho do
circuito realimentado também. Isto será fundamental para o equacionamento de circuitos
envolvendo AO.
4.2 Símbolo e Modelo
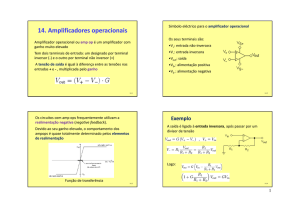
Os símbolos mais comumente utilizados para representar um AO estão na figura a seguir.
A versão mais comum é aquela sem alimentação, mas não devemos esquecer que todo
amplificador operacional precisa de duas fontes de alimentação como mostrado no símbolo
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
3
completo. Uma fonte de alimentação é positiva e a outra costuma ser negativa (o segundo
terminal de cada fonte é ligado ao terra1).
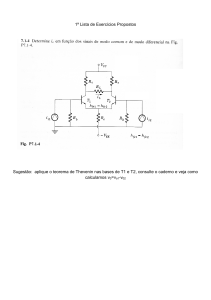
O modelo do AO ideal é apresentado na próxima figura. Observe que a impedância de
entrada do amplificador é infinita (impedância entre cada entrada e o terra) e a impedância de
saída (impedância entre a saída e o terra) é zero. A diferença de potencial entre as duas entradas
controla a tensão na saída do amplificador. Esta diferença de potencial é multiplicada pelo ganho
diferencial ou de malha aberta.
Quando se fala em impedância de entrada e saída de um amplificador estamos
implicitamente calculando a impedância do equivalente Thevenin das entradas ou da saída. Vale
lembrar que o Thevenin é calculado para cada par de fios, ou seja, de cada entrada para o terra ou
da saída para o terra.
Se o ganho diferencial, Ad, é infinito, e o AO está ligado com realimentação negativa, então
v +=v − , pois, como explicado anteriormente, em uma malha de realimentação negativa, onde o
ganho direto tende a infinito, apresenta saída finita e dependente do ganho de realimentação. Esta
relação é válida enquanto o AO estiver trabalhando na região linear (sem a saturação que ocorre
próxima das tensões de alimentação). Em outras palavras, se considerarmos o ganho Ad infinito
(condição ideal) a diferença de potencial entre as entradas obrigatoriamente será nula (condição
ideal) para que a saída seja finita ( v o =A⋅(v +−v - ) ).
1
O terra é o ponto do circuito a partir do qual são medidas as diferenças de potencial para as entradas e saídas do
AO. Neste ponto também são ligadas as duas fontes de alimentação. O terra é a referência para medidas de tensão.
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
4
Outras características muito importantes de um amplificador operacional ideal são
apresentadas na tabela a seguir.
Característica
Símbolo
Valor
Notas
Ganho diferencial ou
Ad
ganho para a diferença de tensão entre as
duas entradas
Ganho de malha aberta
Ao
Ganho de modo comum
Acm
0
ganho para tensão comum as duas
entradas
Rejeição de modo comum
CMRR
atenuação do sinal comum as duas
entradas
Impedâncias diferencial
Rid
impedância entre as duas entradas
Impedância de modo comum
Ricm
impedância de cada entrada para o terra
Impedância de saída
Ro
0
Impedância de saída
Slew-rate
SR
velocidade com que a saída pode variar
Settling time
ST
0
tempo de estabilização
Largura de banda
BW
faixa de frequência
Corrente polarização
Ib
0
corrente de cada entrada
Corrente de offset
Ios
0
desigualdade entre as correntes de
entrada
Tensão de offset
Vos
0
diferença de tensão na entrada, necessária
para que a saída seja nula quando as
entradas forem nulas
Ruído elétrico
VN e I N
0
ruído adicionado ao sinal de saída
Fase
0
entre a entrada e a saída
As características ideais de um AO nunca são alcançadas na prática, mas os erros
decorrentes de assumirmos estes valores ideais é pequeno. Desta forma é comum utilizarmos estas
características para simplificar a análise de circuitos com AO, como será mostrado nas seções
subsequentes.
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
5
4.3 Configurações realimentadas mais comuns
4.3.1 Amplificador inversor
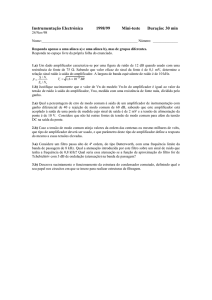
A próxima figura mostra o circuito básico de um amplificador inversor com AO.
Considerando que o ganho Ad do AO não é infinito e sabendo que
v o =Ad⋅( v +−v - ) e v + =0
então
vo
=−v- .
Ad
Equacionando o nó da entrada v - ,
v -−v i v -−v o
+
=0 ,
R1
R2
temos que
v-=
vi⋅R2 +v o⋅R 1 ,
R1+ R2
logo
−
v o v i⋅R 2+ v o⋅R1
=
,e
Ad
R 1 + R2
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
6
vo
=−
vi
R2
R +R .
R1+ 1 2
Ad
Se Ad tende a infinito (AO ideal), então
vo
R
=− 2 .
vi
R1
Observe que se o ganho do AO tende a infinito o ganho do amplificador inversor é
determinado apenas pela malha de realimentação. Convém notar, ainda, que a influência do Ad
não infinito é tanto menor quanto menor for o ganho do amplificador inversor. Considerando o
amplificador inversor com ganho ideal N teremos
vo
=−
vi
N⋅R
Ad⋅N⋅R
Ad⋅N
=
=
R+N⋅R R⋅( Ad + N + 1) Ad +N +1
R+
Ad
Ganho ideal (N)
Ganho do AO (Ad)
Ganho real
Erro
1
1000000
1
-0,002%
10
1000000
10
-0,011%
100
1000000
99,9
-0,101%
1000
1000000
990,09
-0,991%
100000
1000000
9090,8
-9,09%
100000
100000000
9900,9
-0,990%
Se considerarmos o AO como ideal, o equacionamento do ganho fica muito facilitado pelo
uso de duas considerações:
1. Não há corrente circulando nas entradas do AO e
2. A diferença de potencial entre as entradas do AO é nula.
Assim, equacionando o nó da entrada v Princípios de Instrumentação Biomédica – UFRJ, 2015/1
7
v -−v i v -−v o
+
=0 ,
R1
R2
e sabendo que v - =0 , então
v o=−
R2
⋅v .
R1 i
Além do ganho vale a pena observar as impedâncias de entrada e de saída do amplificador
inversor. Observe que a saída do AO é a saída do circuito, então, da mesma forma que o AO, o
circuito também apresenta impedância de saída nula. Já na entrada, entretanto, existe uma
corrente não nula que flui pela resistência R1.
i R 1=
vi
R1
Esta corrente caracteriza uma impedância de entrada igual a R1 e isto pode fazer com que
tanto um circuito que é ligado na entrada do amplificador quanto o próprio amplificador
interfiram no funcionamento um no outro. A próxima figura, por exemplo, ilustra bem este caso.
O circuito ligado antes do amplificador inversor apresenta resistência de saída Rth1 que está em
série com R1.
Com esta montagem o ganho do amplificador inversor é alterado para
vo
−R 2
=
.
v i R 1+ Rth1
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
8
Observe que a tensão na saída do circuito que está ligado ao inversor também foi alterada.
Quando não estava conectado o circuito apresentava saída v x =Vth1 , agora, conectado ao
amplificador inversor, apresenta
v x =Vth1
R2
.
Rth1 + R2
Como visto, o circuito conectado antes do amplificador inversor altera o funcionamento do
amplificador que, por sua vez, altera o funcionamento do circuito ligado a ele. Isto ocorre porque a
impedância de entrada do amplificador inversor não é infinita e porque a impedância de saída do
circuito que está ligado a ele não é nula. Assim, para que amplificadores de tensão se
comportem como blocos em um diagrama, ou seja, de forma independente, é necessário que eles
tenham impedância de saída nula e impedância de entrada infinita. O projeto que envolve
circuitos com estas características pode considerar cada circuito de forma independente e isto
facilita o projeto, além de torná-lo mais flexível. Uma outra boa razão para adotar esta estratégia
de projeto é que nem sempre dispomos de informações completas sobre a impedância de entrada
ou saída de circuitos ou equipamentos que não foram projetados por nós. Isto significa que,
mesmo com a informação de que a impedância de saída de um circuito é de 50 Ω, nada garante
que isto seja verdade para qualquer corrente de saída ou para qualquer frequência, então a melhor
estratégia e fazer um projeto que não dependa desta resistência.
4.3.2 Amplificador não-inversor:
A figura a seguir mostra o desenho básico de um amplificador não inversor.
Se considerarmos que o ganho do AO não é infinito
+
v =v i
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
9
v−=
R1
⋅v
R1 +R2 o
v + −v−=
v i−
vo
Ad
R1
v
⋅v o = o
R1 +R 2
Ad
vo
R1R 2⋅Ad
=
v i R 1R2R1⋅Ad
vo
=
vi
R1 + R 2
R + R2
R1 + 1
Ad
Se Ad tende a infinito então
v o R1 + R 2
=
vi
R1
Supondo que o AO seja ideal, a solução do problema é encontrada fazendo-se a tensão na
entrada negativa igual à tensão na entrada positiva. Equacionando a entrada negativa temos
v i−0 v i−v o
+
=0
R1
R2
v o R1 + R 2
=
vi
R1
( 4.1 )
Mais uma vez, aqui, o ganho do amplificador, quando Ad tende a infinito, é igual aquele
calculado considerando que as duas entradas do AO tem o mesmo valor. Podemos notar, também,
que nesta configuração o menor ganho é o unitário, que pode ser obtido se R1 =∞ (circuito
aberto) ou R2 =0 (curto circuito). Neste caso o circuito do amplificador não inversor é chamado
de buffer. O buffer possui ganho unitário e, assim como o amplificador não inversor, pode ser
utilizado para “isolar” estágios amplificadores. Isolar, aqui, é usado para indicar que os circuitos
anterior ou posterior não afetam nem são afetados pelo amplificador. Isto se deve novamente aos
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
10
equivalentes Thevenin. No caso do amplificador não inversor a impedância de saída é zero (o que
é ótimo), e a impedância de entrada é infinita (o que também é ótimo).
4.3.3 Amplificador somador
A figura a seguir mostra a topologia do amplificador somador inversor básico.
Como podemos observar este amplificador apresenta várias fontes de entrada e, portanto,
pode ser equacionado utilizando o princípio da superposição de fontes. Aqui também levamos em
conta que o AO possui características ideais de funcionamento, assim, a saída será dada pela
equação
(
v o=−R 4⋅
v1 v2 v3
+ +
R1 R2 R3
)
se R1=R2=R3=R, então
v o=−
R4
⋅(v + v + v )
R 1 2 3
Observe que, assim como o amplificador inversor, o amplificador somador não possui
impedância de entrada infinita. As resistências R1, R2 e R3 correspondem respectivamente as
impedâncias das entradas 1, 2 e 3.
4.3.4 Amplificador subtrator
A figura a seguir mostra a topologia do amplificador subtrator básico.
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
11
O cálculo da tensão de saída pode ser feito facilmente por superposição, uma vez que
existem duas fontes atuando sobre o circuito. Quando v2 é zero a entrada v1 é aplicada a um
amplificador inversor. Quando v1 é zero a entrada v2 passa por um divisor de tensão e é aplicada a
um amplificador não inversor.
v o=−v 1
vo =
R2
R 2 R1 + R 2
+ v2
⋅
R1
R 1+ R 2 R 1
R2
⋅(v −v )
R1 2 1
O amplificador subtrator amplifica a diferença entre duas tensões. Idealmente aquilo que
as duas tensões têm em comum não é amplificado. Na prática isto não acontece, pois as duas
resistências R1 e as duas resistências R2 não são idênticas e assim cada entrada é amplificada de
forma um pouco diferente. A próxima figura mostra um amplificador subtrator com quatro
resistências diferentes, uma fonte comum as duas entradas e outras duas fontes produzindo uma
tensão diferencial igual a v2 – v1.
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
12
Este amplificador pode ser estudado por superposição.
a) para a entrada vcm e v 2
v o=(v CM + v 2)⋅R
R +R
4
⋅ 2 1;
R3 + R4 R1
b) para a entrada formada por vcm e v 1
v o=−
R2
⋅(v + v ) ;
R1 CM 1
c) somando as duas equações, e após algum algebrismo
v o=
[
]
R 1⋅R4−R 2⋅R3
R
R 1+ R2 / R1
⋅v CM − 2⋅v1 + 4⋅
⋅v .
R1⋅( R3+ R4)
R1
R3 1+ R4 / R3 2
Observe que as entradas v1 e v2 são amplificadas de forma diferente e que só há uma
forma de cancelar a tensão de modo comum, fazendo
R2 R3
=
R1 R 4
neste caso particular
v o=
R2
⋅(v −v ) .
R1 2 1
Observe que a influência de vcm é nula se a razão entre as resistências R2 e R1 for
exatamente igual à razão entre as resistências R3 e R4. Como isso não acontece é possível dividir
o ganho do amplificador em dois ganhos distintos, o ganho diferencial (Ad) e o ganho de modo
comum (Acm). Desta forma, o subtrator é classificado quanto a sua habilidade de amplificar a
diferença entre os sinais aplicados a suas entradas, e rejeitar a parcela de sinal comum as duas
entradas.
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
13
Como o ganho de modo comum costuma ser muito baixo podemos usar a chamada
rejeição de modo comum, ou CMRR
CMRR=
Ad
(em valor absoluto)
Acm
CMRR=20⋅log
Ad =
( )
Ad
Acm
(em dB)
vo
v
= o
v d v 2−v 1
Acm=
vo
vo
=
v icm ( v 1+ v 2)
2
4.3.5 Amplificador de instrumentação
Em instrumentação é muito comum a medida de sinais de forma diferencial (diferença
entre dois potenciais), como no caso das medidas em ponte de resistores e biopotenciais. Esta
necessidade faz do amplificador subtrator um ótimo candidato para esta tarefa. Entretanto, este
amplificador não apresenta impedância de entrada infinita o que pode ser um problema na
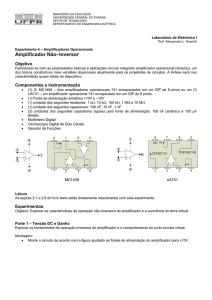
maioria das aplicações de instrumentação. Para resolver este problema, foi criado o amplificador
de instrumentação (In Amp), apresentado na figura a seguir. Neste circuito um amplificador não
inversor e colocado em cada entrada do amplificador subtrator conferindo a montagem uma
característica de amplificador subtrator com elevada impedância de entrada.
Esta topologia apresenta alta rejeição a tensões de modo comum, ganho elevado, ganho
ajustável apenas com um resistor, impedância de entrada (diferencial e de modo comum) elevada
em ambas as entradas. Nesta configuração o primeiro estágio é responsável pelo ganho e o
segundo estágio é responsável pelo CMRR e para que este valor seja elevado o amplificador de
instrumentação é comercializado em um único integrado.
Circuitos integrados com amplificadores de instrumentação alcançam CMRR maiores do
que 100 dB (CMRR > 105), mas este valor costuma decair com a frequência. Exemplos clássicos de
amplificadores de instrumentação integrado são o AD620, AD8221 da Analog Devices, o INA118 e
o INA103 da Texas Instruments.
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
14
O circuito pode ser resolvido por superposição.
a) supondo v 2 aterrada, o potencial na entrada negativa do AO de baixo é zero, logo
v O1=v 1⋅
R+ R 3
,e
R
v O2=−v 1⋅
R3
;
R
b) supondo v 1 aterrada, o potencial na entrada negativa do AO de cima é zero, logo
v O2=v 2⋅
R+ R3
,e
R
v O1=−v 2⋅
R3
;
R
Como a saída do segundo estágio já foi calculada anteriormente e vale
vO=
R2
⋅(v −v )
R1 2 1
então
vO=
R2 R+ 2⋅R3
⋅
⋅(v 2−v 1)
R1
R
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
15
vO=
(
)
R2
2⋅R3
⋅ 1+
⋅(v 2 −v 1)
R1
R
Uma versão de amplificador de instrumentação com dois AO é apresentada na figura
seguinte. A maior vantagem deste amplificador reside no uso de apenas dois AO mas esta também
é sua maior desvantagem.
Por apresentar caminhos diferentes para os sinais amplificados positiva e negativamente o
sinal sofre diferentes atrasos e deslocamentos de fase nos dois caminhos. Como resultado o CMRR
para sinais alternados é reduzido com relação ao amplificador de instrumentação de três AO.
Assim como no amplificador subtrator tradicional, para que este circuito funcione
apropriadamente é necessário que R1/R2=R4/R3 o que significa que o CMRR também será
dependente do perfeito casamento de valores entre os resistores. Para contornar este problema e o
problema com o baixo CMRR em sinais alternados, este circuito pode ser encontrado integrado e,
neste caso, suas características são ajustadas de fábrica para um desempenho superior. Exemplos
deste circuito integrado são o AD627. O circuito com resistor RG permite o ajuste do ganho com a
mudança de apenas um resistor evitando que o CMRR seja afetado.
v O =v 2 – v 1⋅ 1
R4 2⋅R 4
R3
RG
ou v O =v 2 – v 1⋅ 1
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
R4
R3
(sem o resistor RG).
16
4.4 Considerações práticas
O amplificador operacional real é bem diferente do ideal. Seu ganho diferencial (Ad) é da
ordem de 105 ou 106 vezes. Os melhores CMRR estão próximos de 100dB. As impedâncias de
entrada diferencial (Rid) e de modo comum (Ricm) são da ordem de alguns MΩ e, como
consequência, as correntes nas entradas do AO (IB) são da ordem de μA ou nA e não são iguais.
Além disto a saída não é zero quando as duas entradas estão aterradas. Isso adiciona um efeito de
offset (Vos) no AO. Para finalizar a impedância de saída (Ro) não é nula. Um modelo mais completo
do AO, levando em conta todas estas características reais, é apresentado na próxima figura. Neste
modelo foram consideradas apenas características estáticas (de corrente contínua). Características
dinâmicas também devem ser consideradas em algumas aplicações. De um modo geral todas estas
características (estáticas e dinâmicas) se tornam importantes em problemas de alto desempenho e
nestes casos vale a pena consultar um especialista (um engenheiro eletrônico).
Adicionalmente devemos levar em conta que os circuitos eletrônicos, de um modo geral,
trabalham com tensões da ordem de alguns Volts (de 3,3 V até uns 15 V mais ou menos) e que
estas tensões podem ser positivas ou negativas. As potências que os AO conseguem fornecer não
costumam ultrapassar alguns mW e, portanto, as correntes ficam limitadas a mA e, portanto, as
resistências estão na faixa de alguns kΩ (muito baixas elas produzem correntes elevadas, muito
altas elas interferem nas impedâncias de entrada dos AO). O segredo é usar valores que permitam
as aproximações por modelos ideais e que cada circuito possa ser projetado de forma
independente, não afetando ou sendo afetado pelos circuitos do entorno.
Aproveitar toda a faixa de entrada ou saída de um equipamento ou sensor é, em teoria, a
melhor forma de utilizá-lo, mas nem sempre isso é possível ou desejável na prática devido as
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
17
saturações e aos erros de ganho e offset. Por exemplo, um AO comum satura quando sua saída está
a aproximadamente 1 V da tensão de alimentação, então é melhor não fazer o projeto para utilizar
toda a faixa da tensão de alimentação. Se desejamos interligar equipamentos e o projeto é feito
para o máximo aproveitamento das faixas de operação erros nos ganhos ou offsets podem saturar
estes equipamentos. Por outro lado, equipamentos e sensores foram feitos para funcionarem
próximos de seus valores nominais, então, utilizar uma faixa muito pequena do dispositivo não é
recomendado. Use o bom senso, tente usar o máximo possível da faixa de operação, mas sempre
deixe uma folga. Se você tiver que escolher entre ter que trabalhar numa faixa menor do que os
limites ou maior que os limites opte pela faixa menor. O sinal pode não ficar tão bom, mas, com
certeza, você não vai queimar nada nem vai sofrer com saturações. Se tiver que distribuir um sinal
em uma faixa de valores, procure, de um modo geral, distribuir o sinal no centro da faixa.
Algumas vezes, entretanto, é comum ver projetos que aproveitam apenas metade da faixa para
evitar de usar amplificadores somadores. Neste caso você está economizando nos amplificadores e
penalizando a qualidade do sinal. Se isto for aceitável então não há problemas.
Também vale a pena lembrar que quase todos os sinais apresentam valor zero para entrada
zero, então, quando lemos que um sinal pode varia de 10 a 20 mV, por exemplo, provavelmente
esta é uma informação sobre os valores máximos deste sinal e não sobre a faixa de valores. A
resposta correta vai depender do tipo de sinal e você terá que pesquisar. Muitas vezes, também, os
sinais serão simétricos em torno do zero, como no caso do EEG e EMG, mas as informações são
dadas apenas para a faixa positiva de valores. Portanto você deve conhecer o sinal com o qual está
trabalhando. Da mesma forma, se um equipamento diz que sua saída pode variar em uma
determinada faixa de valores, isto não quer dizer que todos os sinais que saírem destes
equipamento ocuparão toda esta faixa. Muito provavelmente os sinais ocuparão apenas parte
desta faixa, mas se for possível ajustar esta amplitude use este recurso a seu favor. A mesma coisa
vale para a entrada de outros dispositivos. Nem sempre você conseguirá produzir sinais que
ocupam toda a faixa de entrada de um conversor AD (dispositivo que converte os sinais
analógicos para sinais digitais), por exemplo.
4.5 Exercícios
A seguir são apresentados atalhos para diferentes fontes de sinais, e conversores AD. Os
próximos exemplos têm como base estes atalhos. Leia os manuais de cada dispositivo para
encontrar nele as informações importantes para cada projeto. De um modo geral estas
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
18
informações são: Faixa, impedâncias de entrada ou saída. Para os projetos devemos pensar no
ganho e no offset necessário para fazer tudo funcionar. Além disto devemos evitar saturações. Use
o bom senso sempre. Os enunciados dos exercícios não estão completamente especificados. A
solução do problema é apenas discutida. Tente resolver o problema sozinho. Simule sua solução.
Célula de carga CMTB200, Acelerômetro ADXL330, Biopotenciais.
Conversor AD USB6008, HyTek iUSBDAQ – U1200816
1) Mostrar um possível circuito para amplificar os sinais da célula de carga CMTB200 de
forma que ela possa ser lida por uma placa iUSBDAQ-U1200816.
A placa iUSBDAQ-U1200816 lê apenas sinais entre 0 e 4,096 V. A célula de carga fornece
apenas sinais positivos (apesar da montagem em ponte permitir variações de sinais positivas e
negativas, esta célula de força é usada apenas para pesar pessoas, então o sinal será sempre
positivo ou sempre negativo, a escolha do projetista). Um ganho pode ser suficiente. Como a fonte
apresenta resistências não nula (ponte) e a medida é diferencial uma boa solução é usar um
amplificador de instrumentação, como na figura a seguir. Se fosse utilizada a placa USB6008 cuja
entrada é simétrica em torno do zero, seria recomendado usar mais um somador ou subtrator para
adequar o offset (mas se a resolução for adequada você pode usar apenas meia faixa). Na USB6008
é possível escolher a faixa de entrada no modo diferencial e isso pode ser utilizado para melhor
utilização da placa. O ganho é determinado pela sensibilidade do sensor, a fonte de alimentação e
o valor da entrada do conversor AD. Também é uma boa prática deixar recursos para ajustar o
offset gerado indevidamente pela própria fonte (1% da saída nominal). Neste caso talvez seja
interessante dividir o ganho em mais de um estágio para evitar a saturação do AD ou usar uma
faixa de tensão menor do que 5 V no AD (isto evita a saturação do AO mesmo com offset). Como o
valor do offset é desconhecido podemos usar um potenciômetro para ajustar o offset correto no
momento da calibração.
Sempre que somamos ou subtraímos uma tensão devemos ficar atentos para que nenhum
amplificador operacional sature. Se isto ocorrer podemos dividir o ganho em dois ou mais estágios
amplificadores e trabalhar o offset entre os estágios de ganho. Assim, o offset é somado ou
subtraído a um sinal de amplitude menor e não satura o amplificador. Devemos ficar atentos,
entretanto, porque este offset será amplificado no próximo estágio. Isto pode ser um problema se
após o offset o sinal não ficar centrado em zero.
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
19
2) Leia os sinais dos acelerômetros do ADXL300 em uma placa USB6008.
O ADXL300 é alimentado com 3 V, tipicamente, e sua saída varia entre 0,6 e 2,4 V. Além
disto a saída do ADXL300 tem impedância de 32kΩ, com tolerância de 15%. A USB6008 aceita
sinais entre ±10 V (modo não diferencial) então o sinal do ADXL300 tem que ser amplificado e o
offset retirado. Podemos utilizar um amplificador não inversor e um somador ou subtrator para
retirar o offset. Se utilizássemos apenas a placa iUSBDAQ-U1200816 seria necessário apenas um
ganho. O ganho é obtido pela divisão entre a faixa dinâmica do conversor AD e do sinal de saída
do ADXL300. O offset é calculado para colocar o sinal no centro da faixa do AD.
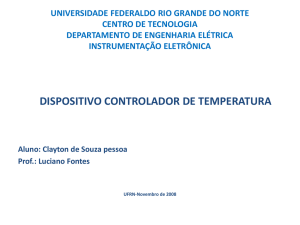
3) Projetar um amplificador para medida de sinais de ECG. O sinal será lido por uma placa
USB6008.
Como a impedância dos eletrodos é grande e desconhecida, e a medida é diferencial é
necessário usar um In Amp, como na próxima figura. Uma vez que as correntes de entrada do In
Amp não são nulas a corrente que sai de uma entrada deveria entrar na outra. Como não há
garantias de que estas correntes sejam iguais e em sentidos contrários então é necessário criar um
nó com um caminho adicional para estes eventuais desequilíbrios. Isto é conseguido com a ligação
do paciente ao terra. Um resistor de 390kΩ foi adicionado por questões de segurança (para
garantir que as correntes passando pelo paciente são baixas). Apesar de não ser um sinal simétrico
o ECG tem amplitudes positivas e negativas então, como a placa USB6008 permite leituras
simétricas com relação ao zero, pode não ser necessário adicionar um offset ao sinal. O ganho do
In Amp depende do maior sinal que se deseja capturar e da faixa de valores escolhido para a
entrada da placa USB6008. No caso da iUSBDAQ-U1200816 precisaríamos adicionar um offset ao
sinal captado.
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
20
Princípios de Instrumentação Biomédica – UFRJ, 2015/1
21