UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA
CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA
ÊNFASE ELETROTÉCNICA
RAFAEL IVAN HARTMANN
MARCOS CESAR MUNIZ
PROJETO E IMPLEMENTAÇÃO DE UM CONVERSOR CC-CA TRIFÁSICO
PARA ACIONAMENTO E CONTROLE ESCALAR DE UM
MOTOR DE INDUÇÃO TRIFÁSICO UTILIZANDO DSP
CURITIBA
2007
RAFAEL IVAN HARTMANN
MARCOS CESAR MUNIZ
PROJETO E IMPLEMENTAÇÃO DE UM CONVERSOR CC-CA TRIFÁSICO
PARA ACIONAMENTO E CONTROLE ESCALAR DE UM
MOTOR DE INDUÇÃO TRIFÁSICO UTILIZANDO DSP
Trabalho apresentado na disciplina de Projeto Final de
Curso II como requisito parcial para a conclusão do
Curso de Engenharia Industrial Elétrica – Ênfase em
Eletrotécnica – do Departamento Acadêmico de
Eletrotécnica, Universidade Tecnológica Federal do
Paraná.
Orientador: Prof. Eduardo Félix Ribeiro Romaneli, Dr.
Coorientador: Prof. Joaquim Eloir Rocha, Dr.
CURITIBA
2007
2
RAFAEL IVAN HARTMANN
MARCOS CESAR MUNIZ
PROJETO E IMPLEMENTAÇÃO DE UM CONVERSOR CC-CA TRIFÁSICO PARA
ACIONAMENTO E CONTROLE ESCALAR DE VELOCIDADE DE UM MOTOR DE
INDUÇÃO TRIFÁSICO UTILIZANDO DSP
Este Projeto Final de Graduação foi julgado e aprovado como requisito parcial para a obtenção do
título de Engenheiro Eletricista pela Universidade Tecnológica Federal do Paraná.
Curitiba, 13 de novembro de 2007.
---------------------------------------------------------------
Prof. Paulo Sérgio Walênia, Esp.
Coordenador de Curso
Engenharia Industrial Elétrica – ênfase Eletrotécnica
---------------------------------------------------------------
Prof. Ivan Eidt Colling, Dr.
Responsável pelos Projetos Finais
Engenharia Industrial Elétrica – ênfase Eletrotécnica
BANCA EXAMINADORA:
---------------------------------------------------------------
Prof. Eduardo Félix Ribeiro Romaneli, Dr.
Orientador
---------------------------------------------------------------
Prof. Joaquim Eloir Rocha, Dr.
Co-orientador
---------------------------------------------------------------
Prof. Antônio Carlos Pinho, Dr.
---------------------------------------------------------------
Prof. Alexandre Ferreira Lobo, M.Eng.
3
Aos nossos pais:
Ivan Levino Hartmann e Maria Helena Hartmann
Guiomar Muniz Sobrinho e Aparecida Perandré Muniz
4
AGRADECIMENTOS
À esposa, namorada e familiares pela força e tempo concedido à realização deste
trabalho.
Aos professores Eduardo Romaneli e Joaquim Rocha pela prestatividade, empenho e
confiança.
Aos professores Walter Sanches, Roger Gules e Ivan Colling pelas valiosas dicas e
sugestões.
Aos Engenheiros Danilo e Gisely Adur, que forneceram a placa de suporte do DSP
56F8013.
Aos colegas Rafael Christiano, Diego, Helton, Rodrigo e Lucy pelas oportunas
contribuições.
A empresa NHS Sistemas Eletrônicos LTDA pelo empréstimo do laboratório,
equipamentos e componentes.
A todos aqueles que contribuíram de alguma forma para o nosso desenvolvimento
possibilitando que alcançássemos a formação de Engenheiros Eletricistas.
5
“Feliz o homem que acha sabedoria, e o homem que
adquire conhecimento, porque melhor é o lucro que
ela dá do que o da prata e melhor a sua renda do que
o ouro mais fino.” (Provérbios 3.13,14)
6
RESUMO
A utilização de inversores de freqüência nas indústrias tem se tornado muito comum
devido às vantagens obtidas na relação custo benefício quando aplicados em conjunto com
motores de indução trifásicos, se comparados com o custo de manutenção dos motores de
corrente contínua.
Este trabalho apresenta o conversor CC/CA usado para acionamento e controle
escalar de velocidade de um motor de indução trifásico como uma alternativa de baixo custo,
fácil implementação e com plataforma de alta tecnologia.
Utilizou-se o conversor CC/CA trifásico com topologia Half-Bridge tipo 180º por
apresentar um excelente aproveitamento das chaves semicondutoras, além de garantir uma
forma de onda de saída estável e independente do tipo de carga e cuja freqüência pode ser
controlada.
A implementação do conversor de tensão foi feita através do uso do controlador
digital de sinais do fabricante Freescale 56F8013, que realiza o acionamento e o controle de
velocidade do motor, o monitoramento e o controle dos dispositivos de chaveamento e a
interface dos circuitos lógicos e de potência do sistema. Para isso foi desenvolvido um
protótipo completo do conversor, incluindo a concepção e a construção de uma placa de
circuito impresso e o desenvolvimento de um código de programa para controle da tensão e
freqüência aplicadas ao motor.
Para melhor compreensão dos conceitos e resultados obtidos este trabalho também
faz uma revisão bibliográfica sobre os conversores CC/CA trifásicos, os métodos de
acionamento e controle de velocidade, a modelagem dos motores de indução trifásicos e sobre
a técnica de modulação por largura de pulso.
Ao final deste trabalho é possível verificar os resultados experimentais obtidos na
simulação e testes em um motor de indução trifásico de 0,33CV, demonstrando a validade e as
vantagens de sua aplicação.
7
ABSTRACT
The use of frequency inverters in industries has became very commom because of his
cost and benefit advantages when they are used with three-phase induction motors, comparing
with the maintenance cost of continuous current motors.
This work presents the DC/AC used for start up and scalar speed control of the threephase motor as a low cost alternative, easy implementation and in a high technology platform.
It was used the three-phase DC/AC converter Half-Bridge 180º topology for the
excellent performance of semiconductor switches, the guarantee of stable output waveform
independently from the load type and that its frequency can be controlled.
The implementation of this converter was made by the Freescale Digital Signal
Processor 56F8013 responsible for the start up and speed control of the motor, the monitoring
and the switches devices control and the logic and power circuit interface. It was developed a
complete prototype of this converter, including the conception and the printed circuit board
construction and the code program development for the voltage and frequency control applied
for the motor.
For better concept and obtained results comprehension this work shows a
bibliographic revision about three-phase DC/AC converters, the start up and speed control
methods, the modeling of three-phase induction motors and about the pulse width modulation
technique.
At the end of this work is possible to check the experimental results obtained in the
simulations and tests of a 1/3 HP three-phase motor induction, showing the validity and its
application advantages.
8
LISTA DE SIGLAS E ABREVIATURAS
Sigla
Descrição
ADC
Analog Digital Converter - Conversor analógico para digital
AGU
Address Generation Unit - Unidade de geração de endereços
CA
Corrente Alternada
CC
Corrente Contínua
CLP
Controlador Lógico Programável
CNC
Comando Numérico Computadorizado
CPU
Central Processing Unit - Unidade central de processamento
DCM
Discontinuous Conduction Mode – Modo de condução descontínuo
DMA
Direct Memory Access – Acesso direto à memória
DSC
Digital Signal Controler – Controlador digital de sinais
DSP
Digital Signal Processor - Processador digital de sinais
ICC
Corrente de Curto Circuito
IHM
Iterface Homen Máquina
LQFP
Low-profile Quad Flat Pack
MAC
Multiplicação-acumulação
MIPS
Milhões de instruções por Segundo.
MIT
Motor de Indução Trifásico
PWM
Pulse Width Modulation, Modulação por largura de pulso
RAM
Random Access Memory
ULA
Unidade Lógico-Aritmética
9
LISTA DE SÍMBOLOS
Símbolo
Descrição
D
Diodo
Er
Valor eficaz da tensão induzida no rotor por fase
er
Tensão induzida por fase do rotor
Ir
Corrente do rotor
p
Número de pólos
Pc
Perdas no material ferromagnético
Pg
Potência presente no entreferro da máquina
Po
Potência de saída
Pi
Potência de entrada
Pr
Perdas no cobre
P
Potência ativa
Q
Potência reativa
Rm
Resistência relativa as perdas no ferro da máquina
Rr
Resistência do enrolamento
Rs
Resistência de perda no estator
R
Resistência
s
Escorregamento
sm
Escorregamento ao máximo torque
S
Potência aparente
S
Chave semicondutora
T
Período de chaveamento
Td
Torque desenvolvido
Ts
Torque de partida
Tmm
Torque de carga
t
Tempo em segundos
Xm
Reatância de magnetização
Xr
Reatância de dispersão o rotor
Xs
Reatância de dispersão no estator
Zi
Impedância de entrada do motor
δ
Posição relativa do rotor
φ
Fluxo magnetizante
θs
Ângulo entre tensão e corrente
10
θm
Defasagem entre tensão e corrente na entrada
ω
Freqüência angular em rad/s
ωb
Velocidade base
ωm
Velocidade angular do rotor
ωs
Velocidade Síncrona
η
Rendimento
LISTA DE FIGURAS
Figura 1.1: Circuito de potência do inversor de tensão trifásico em ponte tipo 120º (BARBI & MARTINS,
2005)........................................................................................................................................................................18
Figura 1.2: Diagrama de seqüência de chaveamento do inversor de tensão trifásico em ponte tipo 120º
(BARBI & MARTINS, 2005)................................................................................................................................19
Figura 1.3: Curva torque x velocidade (POMILIO, 2006)................................................................................20
Figura 1.4: Curva torque x velocidade (POMILIO, 2006)................................................................................21
Figura 2.1: Formação de campo girante (POMÍLIO, 2006)..............................................................................31
Figura 2.2: Campo girante em máquina de 4 pólos (POMÍLIO, 2006)............................................................31
Figura 2.3: Modelos circuitais para motor de indução (POMÍLIO, 2006)......................................................32
Figura 2.4: Modelo simplificado, por fase, de motor de indução (POMÍLIO, 2006)......................................34
Figura 2.5: Característica torque x velocidade de máquina de indução (POMÍLIO, 2006)..........................36
Figura 2.6: Característica torque- escorregamento desprezando Rs (POMÍLIO, 2006)...............................39
Figura 2.7: Fator de potência do motor (POMÍLIO, 2006)...............................................................................39
Figura 2.8: Característica torque x velocidade em função da resistência de rotor (POMÍLIO, 2006).........43
Figura 2.9: Controle de velocidade em função da resistência da armadura (POMÍLIO, 2006)....................43
Figura 2.10: Características torque x velocidade (POMÍLIO, 2006)...............................................................44
Figura 2.11: Controle da tensão do estator (POMÍLIO, 2006).........................................................................44
Figura 2.12: Curvas características torque x velocidade para tensão do estator variável (SIMÃO &
ALMEIDA NETO, 2002)......................................................................................................................................45
Figura 2.13: Característica torque x velocidade com controle da freqüência (POMÍLIO, 2006).................47
Figura 2.14: Característica torque x velocidade com controle de tensão x freqüência (POMÍLIO, 2006)...48
Figura 2.15: Acionamento de máquina de indução com fonte de tensão (SIMÃO & ALMEIDA NETO,
2002)........................................................................................................................................................................49
Figura 2.16: Característica torque x velocidade com acionamento por controle de corrente (POMÍLIO,
2006)........................................................................................................................................................................51
Figura 2.17: Curvas características torque-velocidade para controle da corrente (SIMÃO & ALMEIDA
NETO, 2002)...........................................................................................................................................................52
Figura 2.18: Acionamento da máquina de indução do tipo fonte de corrente (SIMÃO & ALMEIDA
NETO, 2002)...........................................................................................................................................................53
Figura 2.19: Variável controlada em função da freqüência (SIMÃO & ALMEIDA NETO, 2002)..............53
11
Figura 2.20: Estrutura básica de sistema para acionamento em corrente de máquina CA (POMÍLIO,
2006)........................................................................................................................................................................55
Figura 2.21: Estrutura básica do inversor trifásico de tensão (BARBI & MARTINS, 2005)........................56
Figura 2.22: Inversor trifásico de tensão com diodos de roda livre (BARBI & MARTINS, 2005)...............56
Figura 2.23: Circuito de potência do inversor de tensão trifásico em ponte tipo 120º(BARBI & MARTINS,
2005)........................................................................................................................................................................58
Figura 2.24: Diagrama de seqüência de chaveamento do inversor de tensão trifásico em ponte tipo
120º(BARBI & MARTINS, 2005)........................................................................................................................58
Figura 2.25: Diagrama de comando do inversor trifásico de tensão tipo 180º(BARBI & MARTINS,
2005)........................................................................................................................................................................60
Figura 2.26: Inversor trifásico de tensão tipo 180º(BARBI & MARTINS, 2005)...........................................60
Figura 2.27: Principais formas de onda (BARBI & MARTINS, 2005)............................................................61
Figura 2.28: Controle da corrente na carga com abertura e fechamento do interruptor..............................62
Figura 2.29: Tensão média obtida a partir do controle de abertura e fechamento da chave.........................63
Figura 2.30: Ciclo ativo.........................................................................................................................................63
Figura 2.31: Controle da potência pelo ciclo ativo.............................................................................................64
Figura 2.32: Locked Anti-phase PWM..................................................................................................................65
Figura 2.33: Geração de pulsos de comando do inversor (SIMÃO & ALMEIDA NETO, 2002)..................66
Figura 2.34: Sobre modulação do PWM Senoidal (SIMÃO & ALMEIDA NETO, 2002).............................67
Figura 2.35: Nos intervalos tr e tf o dispositivo gera calor em boa quantidade..............................................68
Figura 2.36: Limites de Operação........................................................................................................................70
Figura 2.37: Instrução MAC aplicada ao cálculo de um filtro digital (FREESCALE, 2006a)......................73
Figura 2.38: Encapsulamento e pinagem do DSP56F8013 (FREESCALE, 2006b)........................................76
Figura 2.39: Aplicação do driver..........................................................................................................................77
Figura 2.40: Diagrama do driver IR2130............................................................................................................79
Figura 2.41: Circuito simulado no software........................................................................................................80
Figura 2.42: Correntes e tensão de linha obtida na simulação..........................................................................82
Figura 2.43: Formas do sinal de PWM complementares...................................................................................82
Figura 3.1: Diagrama em blocos do conversor CC-CA trifásico......................................................................84
Figura 3.2: Esquema da pinagem do DSP...........................................................................................................85
Figura 3.3 – Esquema da pinagem do IR2130....................................................................................................87
Figura 3.4: Estágio de potência............................................................................................................................88
Figura 3.5: Acionamento reostato........................................................................................................................89
Figura 3.6: Alimentação da etapa lógica.............................................................................................................90
Figura 3.7: Circuito de inicialização do DSP......................................................................................................91
Figura 3.8: Pull Up do driver…………………………………………………………………..……………….91
Figura 3.9: Circuito de ganho...............................................................................................................................92
Figura 3.10: Circuito de Boot_Strap....................................................................................................................92
Figura 3.11: Circuito de acoplamento.................................................................................................................93
Figura 3.12: Filtro e grampeador.........................................................................................................................94
12
Figura 3.13: Acionamento do relé........................................................................................................................94
Figura 3.14: Circuito conversor CA-CC.............................................................................................................95
Figura 3.15: Circuito para recepção de amostras..............................................................................................95
Figura 3.16: Fonte auxiliar...................................................................................................................................96
Figura 3.17: Encoder.............................................................................................................................................96
Figura 3.18: Acionamento do ventilador.............................................................................................................97
Figura 3.19: Resistores de gate e diodo..............................................................................................................104
Figura 3.20: Diagrama em blocos da fonte auxiliar.........................................................................................106
Figura 3.21: Estrutura de entradas e saídas do programa..............................................................................112
Figura 3.22: Fluxograma do software................................................................................................................114
Figura 3.23: Fluxograma do software................................................................................................................115
Figura 3.24: Esquema do teste da etapa lógica utilizando o KIT MC56F8013DEMO..................................116
Figura 3.25: Formas de onda obtidas no KIT MC56F8013.............................................................................116
Figura 3.26: Placa de adaptação do DSP 56F8013...........................................................................................117
Figura 3.27: Transformador da fonte auxiliar 16V +16V...............................................................................118
Figura 3.28: Layout da placa principal – Toplayer...........................................................................................119
Figura 3.29: Layout da placa principal – BottomLayer .................................................................................119
Figura 3.30: Placa montada................................................................................................................................120
Figura 3.31: Placa motor.....................................................................................................................................120
Figura 3.32: Ensaio prático do protótipo..........................................................................................................121
Figura 3.33: Ensaio prático do protótipo..........................................................................................................121
Figura 3.34: Tensões de linha a 65 Hz...............................................................................................................122
Figura 3.35: Tensões de linha em relação às respectivas freqüências ajustadas...........................................123
Figura 3.36: Gráfico que relaciona a tensão e a freqüência...........................................................................125
LISTA DE TABELAS
Tabela 2.1: Chaves eletrônicas pesquisadas........................................................................................................71
Tabela 2.2: Drivers pesquisados...........................................................................................................................78
Tabela 3.1: Sinais de saída do DSP......................................................................................................................86
Tabela 3.2: Sinais de entrada no DSP..................................................................................................................86
Tabela 3.3: Entradas do driver IR2130...............................................................................................................87
Tabela 3.4: Saídas do driver IR2130....................................................................................................................88
Tabela 3.5: Determinação das bitolas dos fios..................................................................................................108
Tabela 3.6: Parâmetros da fonte auxiliar..........................................................................................................109
Tabela 3.7: Resumo dos eventos do software....................................................................................................113
Tabela 3.8: Relação V/f.......................................................................................................................................124
13
SUMÁRIO
CAPÍTULO 1
INTRODUÇÃO GERAL.....................................................................................................................17
1.1 INTRODUÇÃO........................................................................................................................................17
1.2 PROBLEMA.............................................................................................................................................19
1.3 JUSTIFICATIVA....................................................................................................................................23
1.4 OBJETIVO GERAL...............................................................................................................................23
1.5 OBJETIVOS ESPECÍFICOS.............................................................................................................24
1.6 MÉTODO DE PESQUISA..................................................................................................................24
1.7 ESTRUTURA DO TRABALHO........................................................................................................25
CAPÍTULO 2
REVISÃO BIBLIOGRÁFICA........................................................................................................26
2.1 MOTOR DE INDUÇÃO.......................................................................................................................26
2.2 APLICAÇÕES DO MOTOR DE INDUÇÃO................................................................................29
2.3 VANTAGENS DO MOTOR DE INDUÇÃO TRIFÁSICO......................................................29
2.4 MODELAGEM DA MÁQUINA DE INDUÇÃO TRIFÁSICA...............................................30
2.5 ACIONAMENTO DO MOTOR DE INDUÇÃO..........................................................................30
2.6 MÉTODOS DE CONTROLE DE VELOCIDADE DE UM MOTOR DE INDUÇÃO...42
2.6.1 CONTROLE PELA RESISTÊNCIA....................................................................................................42
2.6.2 CONTROLE PELA TENSÃO DE ALIMENTAÇÃO DO ESTATOR.............................................43
2.6.3 CONTROLE PELA VARIAÇÃO DA FREQUÊNCIA......................................................................46
2.6.4 CONTROLE DA TENSÃO E DA FREQUÊNCIA.............................................................................48
2.6.5 CONTROLE DA CORRENTE.............................................................................................................50
2.6.6 CONTROLE DE TENSÃO, FREQUÊNCIA E CORRENTE...........................................................53
2.7 INVERSORES..........................................................................................................................................54
2.7.1 INVERSORES DE CORRENTE..........................................................................................................54
2.7.2 INVERSORES DE TENSÃO.................................................................................................................55
2.7.2.1 INVERSOR DE TENSÃO TRIFÁSICO TIPO 120º.......................................................................57
2.7.2.2 SEQUÊNCIA DE FUNCIONAMENTO.........................................................................................57
2.7.2.3 INVERSOR DE TENSÃO TRIFÁSICO TIPO 180º.......................................................................59
2.7.2.4 SEQUÊNCIA DE FUNCIONAMENTO.........................................................................................59
2.7.2.5 INVERSOR PWM...........................................................................................................................62
14
2.8 MODULAÇÃO.........................................................................................................................................62
2.8.1 PWM SENOIDAL..................................................................................................................................65
2.8.2 VANTAGENS DO INVERSOR PWM.................................................................................................67
2.8.3 DESVANTAGENS DO INVERSOR PWM.........................................................................................69
2.9 DISPOSITIVOS PARA CHAVEAMENTO...................................................................................69
2.10 PROCESSADOR DIGITAL DE SINAIS – DSP.......................................................................72
2.10.1 DSP – PRINCIPAIS CARACTERÍSTICAS E VANTAGENS........................................................72
2.10.2 APRESENTAÇÃO DO FREESCALE DSP56F8013........................................................................74
2.10.3 VISÃO GERAL DO NÚCLEO 56800/E ............................................................................................74
2.10.4 PERIFÉRICOS.....................................................................................................................................75
2.10.5 MEMÓRIA............................................................................................................................................75
2.10.6 ENCAPSULAMENTO E PINAGEM.................................................................................................76
2.10.7 PROGRAMAÇÃO DO MC56F8013...................................................................................................76
2.11 DRIVER...................................................................................................................................................77
2.12 SIMULAÇÃO.........................................................................................................................................80
2.13 CONCLUSÕES......................................................................................................................................83
CAPÍTULO 3
DESENVOLVIMENTO EXPERIMENTAL........................................................................84
3.1 INTRODUÇÃO........................................................................................................................................84
3.2 DIAGRAMA DE BLOCOS DO CIRCUITO.................................................................................84
3.3 CIRCUITOS..............................................................................................................................................85
3.3.1 DSP – BLOCO DE CONTROLE DIGITAL E LÓGICA DE COMANDO......................................85
3.3.2 DRIVER IR2130.....................................................................................................................................87
3.3.3 ESTÁGIO DE POTÊNCIA....................................................................................................................88
3.3.4 ACIONAMENTO DO REOSTATO.....................................................................................................89
3.3.5 ALIMENTAÇÃO DA ETAPA LÓGICA.............................................................................................90
3.3.6 CIRCUITO DE INICIALIZAÇÃO DO DSP.......................................................................................91
3.3.7 CIRCUITO PULL-UP DO DRIVER....................................................................................................91
3.3.8 CIRCUITO DE GANHO.......................................................................................................................92
3.3.9 CIRCUITO DE BOOT_STRAP............................................................................................................92
3.3.10 CIRCUITO DE ACOPLAMENTO DO SINAL DE FAULT ENTRE O DRIVER E O DSP.......93
3.3.11 FILTRO E GRAMPEADOR DAS AMOSTRAS DE CORRENTE E TENSÃO...........................94
3.3.12 CIRCUITO PARA ACIONAMENTO DO RELÉ.............................................................................94
3.3.13 CIRCUITO CONVERSOR CA-CC....................................................................................................95
3.3.14 CIRCUITO PARA RECEPÇÃO DAS AMOSTRAS........................................................................95
3.3.15 FONTE AUXILIAR CC.......................................................................................................................96
3.3.16 CIRCUITO PARA ENCODER...........................................................................................................96
3.3.17 CIRCUITO PARA ACIONAMENTO DO VENTILADOR.............................................................97
15
3.4 MEMÓRIA DE CÁLCULO.................................................................................................................98
3.4.1CONVERSOR CA-CC............................................................................................................................98
3.4.1.1 DETERMINAÇÃO DO FILTRO CAPACITIVO...........................................................................98
3.4.1.2 DETERMINAÇÃO DOS DIODOS DE RETIFICAÇÃO...............................................................99
3.4.2 CONVERSOR CC-CA TRIFÁSICO..................................................................................................102
3.4.2.1 DIMENSIONAMENTO DAS CHAVES......................................................................................102
3.4.2.2 DIMENSIONAMENTO DOS RESISTORES DE GATE.............................................................103
3.4.2.3 CIRCUITO DE BOOT_STRAP....................................................................................................104
3.4.3 FONTE AUXILIAR..............................................................................................................................106
3.4.3.1 DETERMINAÇÃO DO TRANSFORMADOR DA FONTE........................................................106
3.4.4 CONVERSOR CA-CC DA FONTE AUXILIAR..............................................................................108
3.4.4.1 REGULADOR 15V.......................................................................................................................111
3.4.4.2 REGULADOR 3,3V......................................................................................................................111
3.5 PROGRAMA IMPLEMENTADO NO DSP 56F8013.............................................................112
3.6 MONTAGEM DO PROTÓTIPO.....................................................................................................117
3.6.1 PLACA DE SUPORTE PARA O DSP................................................................................................117
3.6.2 TRANSFORMADOR DA FONTE AUXILIAR................................................................................118
3.6.3 LAYOUT DA PLACA PRINCIPAL...................................................................................................119
3.6.4 PLACA MONTADA.............................................................................................................................120
3.6.5 DADOS DE PLACA DO MOTOR......................................................................................................120
3.6.6 ENSAIO PRÁTICO DO PROTÓTIPO EM BANCADA.................................................................121
3.7 RESULTADOS EXPERIMENTAIS..............................................................................................122
3.7.1 FORMAS DE ONDA RELACIONANDO A TENSÃO E A FREQUÊNCIA.................................122
3.7.2 VALORES OBTIDOS NA PRÁTICA RELACIONANDO A TENSÃO E A FREQUÊNCIA.....124
3.7.3 GRÁFICO DA CURVA V/F................................................................................................................125
3.8 CONCLUSÃO........................................................................................................................................126
CAPÍTULO 4
CONSIDERAÇÕES FINAIS..........................................................................................................127
5 REFERÊNCIAS.......................................................................................................................................129
APÊNDICES....................................................................................................................................................130
APÊNDICE 1 – ESQUEMÁTICO COMPLETO DO CIRCUITO.............................................130
ANEXOS...........................................................................................................................................................131
ANEXO 1 – FOLHA DE DADOS DO DRIVER UTILIZADO...................................................131
ANEXO 2 – FOLHA DE DADOS DO MOSFET UTILIZADO..................................................132
16
CAPÍTULO 1
INTRODUÇÃO GERAL
1.1 INTRODUÇÃO
Os motores de indução, devido a sua grande simplicidade, robustez e baixo custo, são
os motores mais utilizados, sendo adequados para quase todos os tipos de máquinas acionadas
encontradas na prática. Seu princípio básico de funcionamento se baseia no campo girante,
que surge quando um sistema de correntes alternadas é aplicado no estator. Operam
normalmente com velocidade constante, que varia em função da carga mecânica aplicada ao
eixo devido ao escorregamento, ao número de pólos e da freqüência fundamental da tensão de
alimentação.
O grande inconveniente é que, em grande parte das aplicações, necessita-se do ajuste
da velocidade e esta é de complexa implementação se comparado com o motor de corrente
contínua, cujo método de controle é a variação da tensão média aplicada à armadura.
As estratégias de controle mais utilizadas nos conversores são:
Controle escalar: baseia-se no conceito original do conversor de freqüência: impõe
no motor uma determinada tensão/freqüência, visando manter a relação V/f constante. O
controle é realizado em malha aberta e a precisão da velocidade é função do escorregamento
do motor, que varia em função da carga, já que a freqüência no estator é imposta. O controle
escalar é o mais utilizado devido à sua simplicidade e de que na maioria das aplicações não
requer alta precisão e/ou rapidez no controle de velocidade (WEG, 2006).
Controle vetorial: possibilita atingir um elevado grau de precisão e rapidez no
controle do torque e da velocidade do motor. O controle decompõe a corrente do motor em
dois vetores: um que produz o fluxo magnetizante e outro que produzem torque, regulando
separadamente o torque e o fluxo (WEG, 2006).
As principais diferenças entre os dois tipos de controle são que o controle escalar só
considera as amplitudes das grandezas elétricas instantâneas (fluxos, correntes e tensões),
referindo-as ao estator, e seu equacionamento baseia-se no circuito equivalente do motor, ou
seja, são equações de regime permanente. Já o controle vetorial admite a representação das
grandezas elétricas instantâneas por vetores, baseando-se nas equações espaciais dinâmicas da
17
máquina, com as grandezas referidas ao fluxo enlaçado pelo rotor, ou seja, o motor de indução
é visto pelo controle vetorial como um motor de corrente contínua, havendo regulação
independente para torque e fluxo (WEG, 2006).
Com o advento da eletrônica de potência, foi possível construir conversores que
possam
manipular
os
parâmetros
elétricos
aplicados
ao
motor
de
indução
e,
conseqüentemente, variar sua velocidade sem comprometer o torque.
O conversor CC-CA trifásico tipo 120º embora não seja o modo de operação tão
empregado quanto o tipo 180º é uma opção capaz de desempenhar de forma eficaz o controle
escalar de um motor de indução trifásico.
A estrutura de potência é a mesma do inversor trifásico tipo 180º, com a única
diferença que cada chave controlada conduz por apenas 1/3 do período de operação do
conversor, ou seja, 120º. Por essa razão o nome de inversor trifásico tipo 120º. Desse modo,
há um intervalo de 60º entre os comandos de duas chaves controladas pertencentes a um
mesmo braço do inversor. Por conseguinte, em qualquer instante de tempo somente duas
chaves controladas estarão conduzindo, uma do grupo positivo (S1, S2, S3) e outra do grupo
negativo (S4, S5, S6). Os comandos das chaves controladas de um dado braço são defasados
de 120º em relação aos comandos dos braços vizinhos (BARBI & MARTINS, 2005).
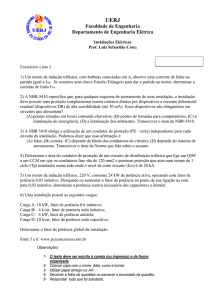
Há seis seqüências de operação em um período da forma de onda de tensão alternada
de saída. Em cada seqüência duas chaves controladas permanecem em condução, conectando
dois dos terminais de carga aos terminais da fonte de alimentação CC, enquanto o terceiro
terminal permanece flutuando.
Figura 1.1- Circuito de potência do inversor de tensão trifásico em ponte tipo 120º (BARBI & MARTINS,
2005).
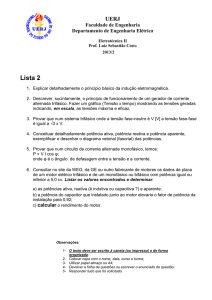
A cada intervalo de 60º uma chave controlada é colocada em condução, obedecendo
a uma seqüência apropriada a fim de gerar um sistema de tensões trifásicas balanceadas
defasadas de 120º. A freqüência de chaveamento define a freqüência de tensão de saída. A
18
Figura 1.2 apresenta, na forma de diagrama, a seqüência de chaveamento do inversor trifásico
de tensão em ponte tipo 120º representado na Figura 1.1.
Verifica-se pelo diagrama de seqüência de chaveamento da Figura 1.2 que a
possibilidade de curto-circuito neste modo de operação é muito remota, dado o fato que há um
intervalo relativamente grande de T/6, ou seja, 60º. Entre a ordem de bloqueio de uma chave e
a ordem de entrada em condução de outra chave, ambas pertencentes ao mesmo braço do
inversor. Essa característica representa uma grande vantagem deste tipo de controle. Como
cada chave controlada conduz por apenas 120º elas são, portanto, menos utilizadas quando
comparadas com as do inversor tipo 180º. Essa técnica representa um meio simples de
redução da tensão na carga sem alterar a tensão de entrada (BARBI & MARTINS, 2005).
Figura 1.2 - Diagrama de seqüência de chaveamento do inversor de tensão trifásico em ponte tipo 120º
(BARBI & MARTINS, 2005).
1.2 PROBLEMA
Devido aos processos que envolvam controle de velocidade, aliado a viabilidade
econômica e confiabilidade, tem surgido à necessidade de implementação de dispositivos
ativos que venham a controlar a velocidade dos motores de indução.
A grande desvantagem do motor de indução trifásico reside na dependência entre
torque e fluxo magnético.
19
A relação entre torque e fluxo é obtida pela expressão (1.1):
T = K1 ⋅ Φ m ⋅ I 2
(1.1)
Sendo:
T – Torque ou conjugado disponível na ponta do eixo [N.m];
K1 – Constante (depende do material e do projeto da máquina);
m – Fluxo de magnetização [Wb];
I2 – Corrente rotórica [A] (depende da carga).
Variando-se apenas a tensão, varia-se a velocidade, entretanto, o fluxo varia e,
conseqüentemente, o torque. A velocidade de rotação mecânica e o fluxo magnetizante são
expressos através das expressões (1.2) e (1.3) respectivamente. A Figura 1.3 relaciona o
torque e velocidade para diferentes tensões aplicadas ao estator do motor de indução.
Figura 1.3 – Curva Torque x Velocidade (POMILIO, 2006).
Sendo:
Td – Torque desenvolvido [N.m];
Vs – Tensão aplicada no estator [V];
wm – Velocidade de rotação mecânica [rpm];
ws – Velocidade do campo girante [rpm].
20
n=
120 ⋅ f 1
⋅ (1 − s )
p
(1.2)
Sendo:
n – Velocidade de rotação mecânica [rpm];
f1 – Freqüência fundamental da tensão de alimentação [Hz];
s – Escorregamento;
p – Número de pólos.
Φm = K2 ⋅
V1
f1
(1.3)
Sendo:
m – Fluxo de magnetização [Wb];
K2 – Constante (depende do material e do projeto da máquina);
V1 – Tensão estatórica [V];
f1 – Freqüência fundamental da tensão estatórica [Hz].
Analisando a expressão (1.3), é possível obter um fluxo magnetizante constante
mantendo-se a relação V1/f1 constante. Como conseqüência, consegue-se o controle da
velocidade com torque constante (1.1). A velocidade é alterada em função da freqüência f1
(1.2) imposta pelo conversor. A tensão V1 é, também, alterada de tal forma a obter V1/f1
constante. A figura 1.4 relaciona o torque e velocidade para diferentes valores de V1 e f1:
Figura 1.4 – Curva Torque x Velocidade (POMILIO, 2006).
Sendo:
Td – Torque desenvolvido [N.m];
wm – Velocidade de rotação mecânica [rpm];
ws – Velocidade do campo girante [rpm].
21
Entre os principais benefícios obtidos com o conversor, pode-se destacar:
• Controle a distância - nos sistemas eletrônicos de variação de velocidade, o
equipamento de controle pode situar-se em uma área conveniente, ficando apenas o
motor acionado na área de processamento - ao contrário dos sistemas hidráulicos e
mecânicos de variação de velocidade (WEG, 2006).
• Redução de custos - partidas diretas ocasionam picos de corrente, que causam danos
não apenas ao motor, mas também a outros equipamentos ligados ao sistema
elétrico. Conversores estáticos proporcionam partidas mais suaves, reduzindo custos
com manutenção (WEG, 2006).
• Aumento de produtividade - sistemas de processamento industrial, geralmente, são
sobre dimensionados na perspectiva de um aumento futuro de produtividade.
Conversores estáticos possibilitam o ajuste da velocidade operacional mais
adequada ao processo, de acordo com os equipamentos disponíveis e a necessidade
de produção a cada momento (WEG, 2006).
• Eficiência energética - o rendimento global do sistema de potência depende não
apenas do motor, mas também do controle. Os conversores estáticos de freqüência
apresentam rendimento elevado, da ordem de 97% ou mais. Motores elétricos
também apresentam alto rendimento, tipicamente de 70% em máquinas pequenas até
95% ou mais em máquinas maiores operando sob condições nominais. Na variação
de velocidade, a potência fornecida pelo motor é variada de maneira otimizada,
influenciando diretamente a potência consumida e conduzindo a elevados índices de
rendimento do sistema (motor + conversor) (WEG, 2006).
• Versatilidade - conversores estáticos de freqüência são adequados para aplicações
com qualquer tipo de carga. Com cargas de torque variável (pequena demanda de
torque em baixas rotações), o controle reduz a tensão do motor compensando a
queda de rendimento que normalmente resultaria da diminuição de carga.
Com cargas de torque (ou potência) constante a melhoria de rendimento do sistema
provém da capacidade de variar continuamente a velocidade, sem necessidade de
utilizar múltiplos motores ou sistemas mecânicos de variação de velocidade (como
polias e engrenagens), que introduzem perdas adicionais (WEG, 2006).
22
• Maior Qualidade - o controle preciso de velocidade obtido com conversores resulta
na otimização dos processos. O controle otimizado do processo proporciona um
produto final de melhor qualidade (WEG, 2006).
1.3 JUSTIFICATIVA
Projetar e implementar um conversor CC-CA trifásico controlado por um DSP
aplicado ao acionamento e controle escalar de velocidade de um motor de indução trifásico
nos possibilitará agregar conhecimentos de programação de processadores digitais de sinais.
Atualmente, a indústria vem empregando em larga escala microprocessadores nos mais
diversos equipamentos acentuando a necessidade de conhecimento de programação daqueles.
O desejo de projetar e implementar esse conversor será a oportunidade prática de aplicar
conceitos que irá além de proporcionar a aquisição de conhecimento teórico sobre
processadores, resultar em um protótipo funcional que poderá ser utilizado em trabalhos
futuros na área de controle de motores com a possibilidade de implementação de um controle
em malha fechada.
Esse projeto além de agregar um diferencial a nossa formação acadêmica na área de
microprocessadores, ainda reunirá conceitos de controle digital, conversão eletromecânica,
eletrônica de potência, acionamentos e controle de máquinas elétricas caracterizando desta
forma um projeto com nível de complexidade compatível com um projeto de graduação.
1.4 OBJETIVO GERAL
Desenvolver um conversor CC-CA aplicado ao acionamento e controle escalar da
velocidade do motor de indução trifásico, controlado por um processador digital de sinais
(DSP). Este conversor terá potência de saída de ½ CV e tensão de entrada 220V.
23
1.5 OBJETIVOS ESPECÍFICOS
•
Estudar o modelamento de uma máquina de indução trifásica;
•
Fazer uma revisão bibliográfica sobre conversores CC-CA, em especial o conversor
trifásico tipo de operação 180º, controle digital e processador digital de sinais
(DSP);
•
Conhecer o hardware do DSP que será utilizado na implementação do circuito;
•
Estudar a linguagem para programação do DSP;
•
Estudar o melhor método de implementação do conversor, que inclui a decisão do
modo de condução, estratégia de disparo da chave, estratégia de controle do
conversor, entre outros.
•
Simular o conversor proposto no projeto;
•
Identificar e dimensionar os componentes que serão utilizados na montagem do
circuito;
•
Montar o protótipo;
•
Realizar ensaios de desempenho e analisar os resultados obtidos.
1.6 MÉTODO DE PESQUISA
O método de pesquisa será de caráter exploratório, experimental e teórico, visando
reunir conhecimentos aplicáveis em projetos de conversores destinados ao acionamento e
controle escalar de velocidade de motores de indução trifásico.
Utilizando livros de Eletrônica de Potência pretende-se absorver os conceitos
necessários com relação às topologias dos conversores CC-CA sendo de interesse especial o
“Tipo de operação 180º”; com auxílio da internet pretende-se analisar sites do DSCE – FEEC
– UNICAMP em especial àqueles disponibilizados pelo Prof. J.A.Pomílio que versam sobre
modelagem de máquinas de indução trifásica, conversores CC-CA para acionamentos de
máquinas de indução trifásica.
Na biblioteca da UTFPR pretende-se encontrar monografias relacionadas a
conversores, modulações PWM com o intuito de reforçar os conceitos que se espera obter nos
livros de eletrônica de potência.
Consultando artigos disponibilizados por outras universidades, em sites de
fabricantes, como por exemplo, o site da WEG Equipamentos Elétricos S.A, no qual pretende-
24
se obter informações e conceitos relacionados a motores de indução alimentados por
conversores de freqüência, características dos conversores de freqüência PWM, entre outros.
Através de catálogos de fabricantes, “data sheet” acessados via internet pretende-se
obter todas as informações necessárias sobre as especificações de limites de corrente, tensão,
potência, tipo de encapsulamento.
Dessa forma pretende-se especificar corretamente os componentes e aplicá-los
convenientemente em nosso projeto.
Utilizando simulador deseja-se modelar e prever situações do comportamento do
conversor em funcionamento para que se consiga realizar comparações com o protótipo a ser
montado.
Além disso, propõem-se a construção de um protótipo e realização de ensaios em
laboratório para melhor análise do desempenho do conversor, ajustes, refinamento do projeto,
e obtenção de resultados.
Considerar-se-á concluído nosso trabalho de pesquisa quando efetivamente
conseguir-se acionar e controlar de forma escalar um motor de indução trifásico de até ½ CV.
1.7 ESTRUTURA DO TRABALHO
O trabalho será constituído de quatro capítulos. O primeiro capítulo apresentará a
proposta do projeto como introdução geral, e descreverão o problema que se pretende
resolver, a justificativa, os objetivos almejados com o desenvolvimento dos trabalhos bem
como o método de pesquisa.
O segundo capítulo será destinado à revisão bibliográfica sobre motores de indução
trifásicos, conversores CC-CA trifásico tipo de operação 180º, além de analisar o controle
escalar de velocidade em malha aberta propriamente dito.
Este capítulo também se destina ao levantamento de informações que fornecerá todo
o embasamento teórico necessário ao desenvolvimento do projeto do conversor proposto.
Serão abordados os seguintes assuntos: topologias de conversores CC-CA trifásico, controle
digital e processadores digitais de sinais.
O terceiro capítulo apresentará a descrição da parte experimental, memória de cálculo
e os resultados obtidos. No último capítulo serão apresentadas as conclusões finais, baseadas
em toda a pesquisa realizada e experiência adquirida ao longo do desenvolvimento do projeto.
25
CAPÍTULO 2
REVISÃO BIBLIOGRÁFICA
2.1 MOTOR DE INDUÇÃO
Um dos motores de construção robusta, simples e mais comum é o motor de indução
trifásico. A corrente no rotor é induzida a partir do campo girante que surge em função das
correntes do estator e também do movimento relativo existente nos condutores do rotor.
O motor de indução consiste de duas partes principais:
O estator é a parte fixa que é constituído por um núcleo de ferro laminado no qual
existem sulcos na superfície em que ficam alojados os enrolamentos. Os enrolamentos do
estator produzem um campo magnético que gira com velocidade síncrona, quando
alimentados com tensão trifásica.
O rotor é construído em dois tipos: o rotor curto circuito ou mais comumente
conhecido como sendo de gaiola, e o rotor bobinado. Os núcleos magnéticos de ambos os
tipos são compostos de ferro laminado.
O rotor bobinado consta de um núcleo em tambor, provido de ranhuras nos quais
enrolamentos semelhantes aos do estator se encontram alojados, configurando o mesmo
número de pólos. No rotor trifásico os enrolamentos do rotor bobinado geralmente se
encontram ligados em estrela, sendo três anéis coletores acoplados ao eixo ligados às três
extremidades livres dos enrolamentos do rotor, facilitando a inserção de resistores variáveis
série em cada fase (GARCIA, 1998).
O rotor tipo gaiola consta de um núcleo em tambor, nos quais fios ou barras de cobre
são alojados em ranhuras.As barras ou fios de cobre são curto-circuitados nos extremos por
anéis. O princípio básico de funcionamento do motor de indução é o seguinte: o campo
girante criado pelas correntes do estator induz f.e.m nos condutores do rotor que dão origem
as correntes de valor igual ao quociente da f.e.m. pela respectiva impedância. Um conjugado é
produzido em função da reação criada pelas correntes sobre o campo girante forçando o rotor
girar no mesmo sentido do campo girante.
Se a velocidade síncrona for atingida, a linhas de força do campo girante não cortarão
os condutores do rotor de forma que as correntes induzidas desaparecerão e conseqüentemente
26
o conjugado do motor torna-se nulo, portanto a velocidade do rotor em relação ao do campo
girante terão que ser obrigatoriamente diferentes (GARCIA, 1998). O campo pulsante é
gerado quando os enrolamentos do estator são percorridos por uma corrente que induzirá um
campo magnético que acompanhará a variação senoidal da corrente. Desta forma surge
sempre um par de pólos N-S, cuja posição dependerá do sentido da corrente, e
conseqüentemente o campo ficará mudando de polaridade sendo portanto pulsante, embora
mantendo fixo o eixo de simetria (GARCIA, 1998).
O campo girante, embora os eixos de simetria sejam fixos no espaço, nada mais é do
que a resultante dos campos pulsantes gerados por cada fase que apresenta defasagem de
ângulo igual as existentes entre as tensões aplicadas, que gira num determinado sentido.
Considerando-se o estator de um motor de indução trifásico, as três fases situadas nas
ranhuras do estator são ligadas na configuração estrela ou triângulo a uma fonte de
alimentação trifásica. As tensões aplicadas se acham defasadas de 120º graus elétricos, e nas
três fases originam correntes iguais defasadas entre si de 120º elétricos. Estas correntes
determinam um campo de valor constante a partir da combinação dos campos magnéticos
pulsante respectivamente por elas gerado. O campo determinado gira com uma velocidade
constante que depende do número de pólos paras os quais o estator foi enrolado e também da
freqüência da fonte (GARCIA, 1998).
A velocidade do rotor é obtida através da expressão:
n=
120 ⋅ f 1
⋅ (1 − s )
p
(2.1)
Sendo:
n – Velocidade de rotação mecânica [rpm];
f1 – Freqüência fundamental da tensão de alimentação [Hz];
s – Escorregamento;
p – Número de pólos.
A relação entre a seqüência de tensões com as respectivas ligações das três fases é
responsável pelo sentido de rotação do campo determinando o sentido de rotação do motor.
Na prática, invertendo-se as ligações de duas fases aleatoriamente do estator com a linha de
alimentação obtém-se a inversão do sentido de rotação do motor.
Quando o motor funciona sem carga, o rotor gira com velocidade quase igual à
velocidade síncrona, porém com carga correntes maiores são induzidas para desenvolver o
conjugado necessário, uma vez que o rotor se atrasa em relação ao campo girante.
27
Chama-se escorregamento, a seguinte relação:
s=
n − nr
n
(2.2)
Sendo
- escorregamento
- velocidade síncrona
- velocidade do rotor
O escorregamento, conforme o tipo e tamanho do motor, geralmente são expressos
em porcentagem sendo especificado em torno de 1 a 5%.
A freqüência da corrente no rotor é o produto do escorregamento pela freqüência da
corrente no estator, isto é:
fr = s ⋅ f
(2.3)
Para os motores trifásicos de corrente alternada as correntes podem ser determinadas
pelas seguintes expressões:
IN =
PN
3 ⋅ V N ⋅ cos ϕ ⋅ η
=
PE
3 ⋅ V N ⋅ cos ϕ
(2.4)
Sendo VN a tensão nominal (de linha) e cosϕ o fator de potência nominal. A corrente
consumida por um motor varia bastante dependendo da aplicação.
Na maioria dos motores, a corrente é muito alta na partida, caindo paulatinamente
com o aumento da velocidade. Atingida a velocidade nominal fornecendo uma potência
nominal e não existindo a ocorrência de uma sobrecarga a corrente atinge seu valor nominal.
28
2.2 APLICAÇÕES DO MOTOR DE INDUÇÃO
Motores de indução com rotor bobinado são aplicáveis para atender cargas de alto
torque de partida e onde a corrente de partida deve ser baixa e aquelas que necessitam algum
tipo de controle.
Aplicações típicas são esteiras, britadores, guindastes, elevadores, compressores
entre outras.
Motores de indução são melhores aplicados para solicitações de alta velocidade e isto
é em grande parte por causa da reatância de magnetização Xm que é inversamente
proporcional ao quadrado do numero de pólos, tamanho da armadura e número de espiras. Em
contra partida os motores de menores velocidades têm correntes de magnetização
proporcionalmente maior e conseqüentemente menor fator de potência.
Motores Síncronos são geralmente usados para aplicações exigentes de velocidades
abaixo de 500 rpm aproximadamente (SIMÃO & ALMEIDA NETO, 2002).
2.3 VANTAGENS DO MOTOR DE INDUÇÃO TRIFÁSICO
O MIT apresenta como pontos positivos a seu favor as seguintes características:
São construtivamente mais simples e robustos dos que os motores de corrente
contínua.
Apresenta menor massa (20 a 40% a menos), para uma mesma potência, o que leva a
um custo menor de aquisição do que as máquinas CC equivalentes.
A manutenção também é mais simples e menos onerosa se comparada às máquinas
CC, apresentam um consumo de energia menor nos processos de aceleração e frenagem,
possibilidade de obtenção de velocidades maiores o que implica em potências maiores.
A grande desvantagem do MIT quando controlado por variação de tensão reside na
dependência entre fluxo e tensão no estator. As máquinas CC por contarem com excitação
independente são controladas facilmente por variação de tensão, porém com a evolução dos
inversores que permitem variação simultânea da tensão e freqüência no estator, O MIT
consegue equipararem-se as máquinas CC de forma que a desvantagem desaparece (SIMÃO
& ALMEIDA NETO, 2002).
Entretanto, quando se deseja realizar um acionamento controlado, os conversores e
sistemas de controle tendem a ser mais sofisticado que aqueles utilizados para as máquinas
29
CC, sendo necessário avaliar o custo global da implementação e não apenas o relativo à
máquina.
Considerando que o custo dos conversores e circuitos eletrônicos tem diminuído com
o passar o tempo, enquanto o custo de produção das máquinas tem tido uma variação muito
menos significativa, o custo total do sistema máquina mais acionamento cada vez mais tende a
ser vantajoso para a máquina CA.
Em termos de desempenho dinâmico, novas técnicas de controle, como o controle
vetorial, têm possibilitado às máquinas CA apresentarem comportamento similar ao das
máquinas CC, impondo-se definitivamente sobre as vantagens anteriores das máquinas de
corrente contínua.
2.4 MODELAGEM DA MÁQUINA DE INDUÇÃO TRIFÁSICA
Uma máquina de indução trifásica possui enrolamentos de estator nos quais é
aplicada a tensão alternada de alimentação. O rotor pode ser composto por uma gaiola curtocircuitada ou por enrolamentos que permitam circulação de corrente. De qualquer forma, por
efeito transformador, o campo magnético produzido pelos enrolamentos do estator induz
correntes no rotor, de modo que, da interação de ambos os campos magnéticos será produzido
o torque que levará a máquina à rotação (POMÍLIO, 2006).
Dada à característica trifásica da alimentação do estator e à distribuição espacial dos
enrolamentos, o campo produzido pelo estator é girante, ou seja, sua resultante possui um
movimento rotacional. O campo produzido pelas correntes induzidas no rotor terá sempre
como característica acompanhar o campo girante do estator.
A produção de torque no eixo da máquina deriva do fato da velocidade do rotor ser
necessariamente diferente da velocidade do campo girante. Se o rotor girar na mesma
velocidade do campo girante não haverá variação de fluxo pelos enrolamentos do rotor e não
haverá corrente induzida. A Figura 2.1 ilustra a formação do campo girante.
A corrente induzida no rotor possui uma freqüência que é a diferença das freqüências
angulares existentes entre o rotor e o campo girante. Portanto, na partida com a máquina
parada as correntes serão de 60Hz. À medida que a máquina ganha velocidade, a freqüência
vai caindo até atingir a velocidade de regime tipicamente a poucos Hz (POMÍLIO, 2006).
A velocidade angular do campo girante depende do número de pólos da máquina,
além da freqüência de alimentação. O número de pólos é função do número de enrolamentos
simetricamente deslocados no estator alimentados pela mesma tensão de fase.
30
Portanto se três enrolamentos estiverem dispostos num arco de 180º sendo cada um
para cada fase e os outros três ocuparem o outro semi-perímetro do estator está máquina é dita
de 4 pólos.
Figura 2.1 - Formação de campo girante (POMÍLIO, 2006).
O campo girante conta com pólos magnéticos intercalados e simetricamente
distribuídos. A figura 2.2 ilustra tal situação. O campo resultante observado no entreferro da
máquina apresenta os pólos resultantes deslocados espacialmente de 90º um do outro devido
ao fato da simetria circular das máquinas. A resultante no centro do arranjo é nula, porém o
que importa é o fluxo presente no entreferro. Uma rotação de 180º no eixo corresponde a um
ciclo completo das tensões de alimentação, ou seja 360 graus elétricos.(POMÍLIO, 2006).
Figura 2.2 - Campo girante em máquina de 4 pólos (POMÍLIO, 2006).
Sendo p o número de pólos e
a freqüência angular (em rad / s) das tensões de
alimentação a velocidade síncrona é dada por:
31
n=
120 ⋅ f 1
p
(2.5)
O modelo de um motor de indução por fase é ilustrado na figura (2.3a).
Figura 2.3 - Modelos circuitais para motor de indução (POMÍLIO, 2006).
a) circuito do rotor;
b) com rotor e estator separados;
c) com rotor refletido ao lado do estator.
Utilizando o modelo do rotor, onde Xr ’ representa a indutância de dispersão (na
freqüência ) e Rr’ é a resistência do enrolamento, obtém-se a corrente do rotor:
s ⋅ Er
'
Ir =
'
Rr + j ⋅ s ⋅ X r
(2.6)
Er
'
Ir =
'
'
Rr
'
+ j⋅ Xr
s
(2.7)
32
O modelo do rotor pode, então, ser modificado, a fim de que o escorregamento afete
apenas a resistência do rotor, como se vê na figura (2.3b), onde se inclui também um circuito
equivalente para o estator (POMÍLIO, 2006).
Refletindo o lado do rotor para o do estator, obtém-se o circuito equivalente
demonstrado na figura (2.3c). Indica-se nesta figura a reatância de magnetização, Xm e a
resistência relativa às perdas no ferro da máquina, Rm. A resistência do enrolamento do estator
é Rs e a reatância de dispersão, Xs.
As perdas no cobre podem ser estimadas por:
Ps = 3 ⋅ Is 2 ⋅ Rs
(2.8)
Pr = 3 ⋅ Ir 2 ⋅ Rr
(2.9)
As perdas no material ferromagnético são estimadas por:
Pc =
3 ⋅ Vm 2 3 ⋅ Vs 2
≈
Rm
Rm
(2.10)
A potência presente no entreferro da máquina, que é aquela que se transfere para o
rotor,
2
Pg = 3 ⋅ I r ⋅
Rr
s
(2.11)
A potência desenvolvida efetivamente responsável pela produção do torque
eletromagnético é:
Pd = Pg − Pr = Pg ⋅ (1 − s )
(2.12)
O torque desenvolvido é:
Td =
Pd
ωm
=
Pg
ωs
(2.13)
33
A potência de entrada é:
Pi = Pc + Ps + Pg = 3 ⋅ Vs ⋅ I s ⋅ cos θ s
(2.14)
A potência desenvolvida subtraída das perdas mecânicas Px (atrito e ventilação)
constitui-se na potência de saída:
Po = Pd − Px
(2.15)
A eficiência será:
η=
Po
Pd − Px
=
Pi Pc + Ps + Pg
(2.16)
Sendo Pg >> (Pc + Ps ) e Pd >> Px , a eficiência é, aproximadamente:
η ≈ 1− s
(2.17)
Sendo, normalmente Rm muito grande e X m 2 >> (Rs 2 + X s 2 ) , o ramo relativo à
magnetização pode ser resumido apenas pela reatância sendo representada na entrada do
circuito, como mostrado na Figura 2.4.
Figura 2.4 - Modelo simplificado, por fase, de motor de indução (POMÍLIO, 2006).
34
Considerando o modelo simplificado obtemos a impedância de entrada do motor,
demonstrada a seguir:
Zi =
− X m ⋅ ( X s + X r ) + j ⋅ X m ⋅ Rs +
Rr
s
Rr
+ j ⋅ (X m + X s + X r )
s
Rs +
(2.18)
A defasagem entre tensão e corrente na entrada será:
θ m = π − tan −1
Rr
s + tan −1 X m + X s + X r
R
Xs + Xr
Rs + r
s
Rs +
(2.19)
Da Figura 2.4, a corrente de rotor é:
Ir =
Vs
R
Rs + s
s
2
1/ 2
+ (X s + X r )
(2.20)
2
Substituindo Ir na expressão da potência no entreferro e, esta na expressão do torque
desenvolvido, tem-se:
3 ⋅ Rr ⋅ V s
Td =
s ⋅ ωs ⋅
R
Rs + r
s
2
2
+ (X s + X r )
2
(2.21)
A Figura 2.5 mostra uma curva torque x velocidade do motor alimentado com uma
fonte de tensão senoidal.A forma de onda típica é obtida considerando-se amplitude e
freqüência fixa da fonte de alimentação. Na ilustração a seguir identificam-se três regiões de
operação:
35
- Tração (0< S <1)
- Regeneração (S<0)
- Reversão (1< S < 2)
Figura 2.5 - Característica torque-velocidade de máquina de indução (POMÍLIO, 2006).
Em tração, o rotor roda no mesmo sentido do campo girante e, à medida que o
escorregamento aumenta (partindo do zero), o torque também aumenta, de maneira
praticamente linear, enquanto o fluxo de entreferro se mantém constante.
No rotor a variação da tensão induzida diferente da impedância é linear com o
escorregamento, sendo que a tensão induzida e a impedância são responsáveis pela corrente
do rotor. Para valores pequenos de s (até cerca de 10%, tipicamente), a reatância do rotor pode
ser desconsiderada (s.Xr’, na equação (2.10)). Sendo o rotor praticamente resistivo, de modo
linear com o escorregamento a corrente do rotor cresce o mesmo acontecendo com a potência.
O torque varia de forma praticamente linear com o aumento de s, considerando que a
velocidade praticamente constante (próxima a
s).
Quando as hipóteses acima deixam de serem válidas, ou seja, quando a reatância do
rotor se torna significativa e a resistência equivalente passa a diminuir de modo mais
marcante, tem-se uma redução da potência (seja pela diminuição da corrente, seja pela menor
fração de tensão aplicada à parte resistiva), levando a menor potência e torque.
36
Na região linear é que se dá a operação normal do motor, uma vez que, se o torque de
carga exceder Tmm, o motor, perdendo o seu torque, parará, levando as elevadas perdas no
rotor, devido às altas correntes induzidas (POMÍLIO, 2006).
Na região de regeneração, o rotor e o campo girante movem-se no mesmo sentido,
mas a velocidade mecânica
m,
é maior do que a velocidade síncrona, levando a um
escorregamento negativo. A máquina se encontrará operando como um gerador e, portanto
entregando potência ao sistema que estiver conectado o estator, quando a resistência
equivalente do rotor for negativa. A característica torque x velocidade assemelha-se àquela da
operação em tração, porém com um valor de pico maior.
Na região de reversão o rotor comporta-se em oposição ao campo girante provocando um
escorregamento maior que 1. Isto pode ocorrer quando se faz a inversão na conexão de duas
fases do estator, provocando a mudança no sentido de rotação do campo.
O torque produzido opõe-se ao movimento do rotor, levando a uma frenagem da
máquina. Nesta situação as correntes são elevadas enquanto o torque presente é pequeno.
Internamente na máquina pode surgir um excessivo aquecimento devido à dissipação de
energia retirada da massa girante. Não se recomenda tal modo de operação (POMÍLIO, 2006).
Fazendo-se
dTd
= 0 obtém-se o escorregamento responsável pelo torque máximo. O
ds
torque de partida é obtido quando s = 1.
sm = ±
[R
Rr
2
s
+ (X s + X r )
]
(2.22)
2 1/ 2
Obtêm-se os máximos torques possíveis substituindo os valores na expressão do
torque:
Tmm =
Tmr =
3 ⋅ Vs
2
2ω s ⋅ Rs + Rs + ( X s + X r )
2
3 ⋅ Vs
2
2ω s ⋅ − Rs + Rs + Rs + ( X s + X r )
2
(2.23)
2
2
2
(2.24)
37
Para motores de potência superior a 1 kW, é razoável supor que Rs é
desprezível em relação às outras impedâncias, permitindo simplificar as expressões conforme
demonstrado a seguir:
3Rr ⋅ V s
Td =
Rr
s
s ⋅ ωs ⋅
Ts =
[
2
3Rr ⋅ V s
2
+ (X s + X r )
(2.25)
2
ω s ⋅ ( R r )2 + ( X s + X r ) 2
sm = ±
2
]
Rr
Xs + Xr
(2.26)
(2.27)
2
Tmm = −Tmr
3 ⋅ Vs
=
2ω s ⋅ ( X s + X r )
(2.28)
Normalizando (2.29) e (2.30) em relação ao torque máximo:
2⋅s⋅s
Td
= 2 m2
Tmm s m + s
(2.29)
Ts
2⋅s
= 2 m
Tmm s m + 1
(2.30)
38
Para s<1 e s2<<sm2, o torque normalizado pode, ainda, ser aproximado por:
Td
ω − ωm
2s
=
=2 s
Tmm s m
sm ⋅ ω s
ωm = ωs ⋅ 1 −
s m ⋅ Td
2 ⋅ Tmm
(2.31)
(2.32)
A Figura 2.6 mostra as curvas aproximadas (desprezando Rs) e linearizada, na região
de baixo escorregamento. Na figura 2.7 tem-se o comportamento do fator de potência.
Na região de operação em que o escorregamento é menor do que sm, o motor opera
de modo estável. Quanto menor a resistência do rotor, menor será o valor de sm e mais
próxima estará à velocidade síncrona da velocidade mecânica. Nesta região, o motor opera
praticamente a velocidade constante (POMÍLIO, 2006).
Figura 2.6 - Característica torque-escorregamento desprezando Rs (POMÍLIO, 2006).
Figura 2.7 - Fator de potência do motor (POMÍLIO, 2006).
39
2.5 ACIONAMENTO DO MOTOR DE INDUÇÃO
Sempre que possível, a partida de um motor trifásico tipo gaiola deve ser direta por
meio de um dispositivo de controle, geralmente um contator, entretanto a corrente elevada na
partida torna-se o inconveniente deste método.
Caso a partida direta torne-se inviável quer seja pela exigência da concessionária ou
por restrições da própria instalação elétrica recorre-se a utilização de sistemas de partida
indireta (GARCIA, 1998).
Partida com chave estrela-triângulo:
A utilização deste método exige que o motor disponha em sua configuração da
possibilidade de ligação em dupla tensão. Os motores devem ter no mínimo seis bornes de
ligação 127/220V, 220/380V, 380/660V ou 440/760V (GARCIA, 1998).
Partida com chave compensadora:
Neste método um autotransformador que possui tapes de 50,65 e 80% da tensão
nominal mantém reduzida a tensão no instante da partida (GARCIA, 1998).
Partida com Soft Starter:
Soft-Starter é um dispositivo eletrônico composto de pontes com SCR´s acionados
por uma placa eletrônica com a finalidade de controlar a corrente de partida dos motores de
indução trifásicos.
O soft-stater, através do circuito de potência, variando o ângulo de disparo dos seis
SCR´s que compõe o circuito, controla a tensão eficaz aplicada ao motor. Desta forma
controla-se a corrente de partida do motor através de uma partida suave e consequentemente
sem quedas bruscas na rede elétrica, ao contrário do que ocorre nas partidas diretas.
Geralmente funciona com a tecnologia chamada by-pass que através de um contator
acionado logo após o motor ter recebido a tensão da rede, proporciona a saída dos módulos
tiristores evitando sobre aquecimento aos mesmos.
Partida com inversor:
Conversores CC em CA são conhecidos como inversores. A função de um inversor
consiste em converter uma tensão de entrada CC em uma tensão de saída CA simétrica de
amplitude e freqüência desejadas. Tanto a tensão de saída quanto à freqüência pode ser fixa
ou variável. Mantendo-se o ganho do inversor constante e apenas variando-se a amplitude da
tensão de entrada CC, obtém-se uma tensão de saída variável. A relação entre a tensão de
saída CA e a tensão de entrada CC define o ganho do inversor.
40
Por outro lado, através do controle por modulação de largura de pulso obtém-se a
variação do ganho do inversor e conseqüentemente uma tensão de saída variável mesmo
quando a tensão de entrada CC for fixa e não controlada.
As formas de onda da tensão de saída de inversores ideais deveriam ser puramente
senoidais. Entretanto, as formas de onda de inversores práticos são não senoidais e contêm
certos harmônicos. Para aplicações de potência elevada fazem-se necessárias formas de onda
senoidais de baixa distorção, porém para baixa e média potência, tensões de onda quadrada ou
quase quadrada podem ser aceitáveis. O conteúdo harmônico pode ser minimizado ou
reduzido significativamente através do emprego de técnicas de chaveamento, isto se dá ao fato
principalmente pela disponibilidade atual de dispositivos semicondutores de alta potência e
velocidade.
Os inversores são amplamente empregados no acionamento de motores de indução
com velocidade variável. A entrada pode ser uma bateria, célula combustível, célula solar ou
outra fonte CC. As saídas monofásicas típicas são: (1) 120 V a 60 Hz, (2) 220 V a 50 Hz e (3)
115 V a 400 Hz. Para sistemas trifásicos de alta potência, as saídas típicas são: (1) 220 / 380 V
a 50 Hz (2) 120 / 208 V a 60 Hz e (3) 115 / 200V a 400 Hz.
Os inversores podem, geralmente, ser classificados em dois tipos: inversores
monofásicos e inversores trifásicos. Dependendo das aplicações ambos os tipos de inversores
requisitarão dispositivos de disparo ou de bloqueio controlados tais como TBP´s, MOSFET’s,
IGBT’s, MCT’s, GTO’s ou tiristores em comutação forçada. Esses inversores para gerar uma
tensão de saída CA, utilizam sinais de controle baseados na modulação por largura de pulso.
Um inversor é chamado inversor alimentado por tensão se a tensão de entrada for constante e
alimentado por corrente se a corrente de entrada for constante.
Os inversores utilizam-se da conversão CA-CC e novamente CC-CA, enquanto que o
ciclo conversor que os antecederam, convertia 60Hz da rede em uma freqüência mais baixa.
41
2.6 MÉTODOS DE CONTROLE DE VELOCIDADE DE UM MOTOR DE INDUÇÃO
A velocidade de um motor de indução, do ponto de vista do acionamento, pode ser
controlada das seguintes maneiras:
a) Controle da resistência do rotor
b) Controle da tensão do estator
c) Controle da freqüência do estator
d) Controle da tensão e da freqüência do estator
e) Controle da corrente
f) Controle da tensão, corrente e freqüência.
2.6.1 CONTROLE PELA RESISTÊNCIA
Para uma máquina de rotor bobinado colocam-se externamente resistências que se
somem à impedância própria do rotor, como mostrado na Figura 2.9a. A variação de Rx
permite mover a curva torque x velocidade da máquina, como mostrado na Figura 2.8.
Este método permite elevar o torque de partida e limitar a corrente de partida. Devido
à dissipação de potência sobre as resistências, este método é considerado de baixa eficiência.
Torna-se fundamental para o bom funcionamento da máquina a garantia de balanceamento
entre as três fases.
Este tipo de acionamento é utilizado quando se necessita de um elevado torque e
número de partidas. Os resistores podem ser substituídos por um retificador trifásico que
“enxerga” uma resistência variável, determinada pelo ciclo de operação do transistor de saída
conforme ilustrado na figura 2.9b.
Através de outros arranjos, utilizando-se retificadores controlados, consegue-se que
ao invés de dissipar energia sobre a resistência externa, a mesma possa ser devolvida para a
rede. A relação existente entre a tensão CC determinada pelo retificador e a corrente Id reflete
para os enrolamentos do rotor a resistência equivalente. Este arranjo é ilustrado na Figura
2.9c.
42
Figura 2.8 Característica torque x velocidade em função da resistência de rotor (POMÍLIO, 2006).
Figura 2.9 - Controle de velocidade em função da resistência da armadura (POMÍLIO, 2006).
2.6.2 CONTROLE PELA TENSÃO DE ALIMENTAÇÃO DO ESTATOR
Da equação do torque verifica-se que ele é ao quadrado da tensão aplicada ao estator.
Desta forma uma redução na tensão produz para um dado torque um aumento no
escorregamento e a diminuição da velocidade, como ilustrado na Figura 2.10.
Este tipo de acionamento não é aplicável a cargas que necessitem de torque
constante, nem elevado conjugado de partida.
43
A faixa de ajuste de velocidade é relativamente estreita e é feita ao custo de uma
redução significativa do torque disponível. Quando a curva do torque da carga cruza a curva
da máquina além do ponto de torque máximo, não é possível o acionamento.
Os motores denominados pela classe D são concebidos para este tipo de acionamento
pois possuem elevada resistência de rotor. Em função da elevada resistência do rotor
consegue-se que a variação de velocidade torne-se maior e não seja muito severa a perda de
torque em baixas velocidades (POMÍLIO, 2006).
Figura 2.10 - Características torque x velocidade (POMÍLIO, 2006).
Por meio de um controlador de tensão CA constituído por tiristores operando com
controle de fase, pode-se variar a tensão do estator. Em sistemas de baixa performance tais
como bombas centrífugas, ventiladores que necessitam de baixo torque de partida, a
simplicidade justifica seu uso. Considerando-se o uso de um inversor trifásico, outra
possibilidade é operar com tensão ajustável a partir de modulação por largura de pulso
mantendo-se a freqüência fixa. Reduzindo-se a tensão no instante da partida consegue-se
limitar consideravelmente a corrente de partida. A Figura 2.11 ilustra, esquematicamente, os
acionamentos.
Figura 2.11 – Controle da tensão do estator (POMÍLIO, 2006).
44
Em qualquer circuito magnético, a tensão induzida é proporcional ao fluxo no
entreferro e a freqüência. À medida que a tensão é reduzida no estator o mesmo ocorrerá com
o fluxo no entreferro e o torque.A um escorregamento de aproximadamente 1/3, a corrente
terá um máximo a uma tensão mais baixa.
Nas situações em que as máquinas apresentam escorregamento baixo o intervalo de
velocidade torna-se muito estreito, tornando-se inadequado para cargas que operam a torque
constante. Normalmente é aplicado em situações que necessitem de baixo torque de partida e
faixa estreita de velocidade a um escorregamento relativamente baixo (SIMÃO & ALMEIDA
NETO, 2002).
Figura 2.12 - Curvas características torque-velocidade para tensão do estator variável (SIMÃO &
ALMEIDA NETO, 2002).
Através de controladores de tensão CA , inversores trifásicos PWM pode-se obter a
variação de tensão no estator. Os controladores de tensão CA, devido às características de
faixa de velocidade limitada, normalmente são utilizados em aplicações de baixa potência e
também em máquinas de indução de alta potência limitando grandes picos de corrente, porém
apresentam baixo fator de potência na entrada além de levado conteúdo harmônico.
45
2.6.3 CONTROLE PELA VARIAÇÃO DA FREQUÊNCIA
Controlando-se apenas a freqüência da fonte de alimentação de um motor de indução
é possível obter-se a variação da velocidade e torque.
A máquina estará em seu valor nominal desde que os valores do fluxo no entreferro,
de tensão e freqüência se encontrem em seus valores nominais. Se a freqüência for diminuída
e a tensão mantida constante o fluxo aumentará, levando conseqüentemente à saturação da
máquina, alterando os parâmetros da máquina e a característica torque x velocidade. Em
baixas freqüências, com a queda no valor das reatâncias, as correntes tendem a se elevar
demasiadamente. Este tipo de controle não é normalmente utilizado (POMÍLIO, 2006).
O fluxo e o torque diminuem se a freqüência for aumentada acima do valor nominal.
Se a velocidade síncrona à freqüência nominal for determinada como sendo
b (velocidade
base), a velocidade síncrona e o escorregamento em outras freqüências de excitação serão:
ω s = b ⋅ ωb
s=
(2.33)
b ⋅ ωb − ω m
ω
= 1− m
b ⋅ ωb
b ⋅ ωb
(2.34)
A expressão para o torque será:
3 ⋅ Rr ⋅Vs
Td =
s ⋅ b ⋅ ωb ⋅
R
Rs + r
s
2
2
+ (b ⋅ X s + b ⋅ X r )
2
(2.35)
As curvas típicas de torque x velocidade para diferentes valores de b são ilustradas na
Figura 2.13. O torque, abaixo da velocidade base, deve ficar limitado ao seu valor nominal.
Considerando a ocorrência de perda de torque, pode-se através da elevação da
freqüência aumentar a velocidade, esta característica é semelhante à dos motores de corrente
contínua quando pelo método do enfraquecimento de campo se obtém a elevação da
velocidade.Uma alimentação deste tipo pode ser obtida através da utilização de um inversor
que forneça uma tensão constante (valor eficaz), variando apenas a freqüência.
46
Figura 2.13 - Característica torque - velocidade com controle da freqüência (POMÍLIO, 2006).
Pode-se notar, que à tensão e freqüência nominal o fluxo terá seu valor nominal. O
fluxo aumentará se a freqüência for reduzida abaixo do seu valor nominal e a tensão for
mantida fixa no seu valor nominal, provocando a saturação no entreferro e portanto tornando
os parâmetros da máquina não confiáveis na determinação da curva da característica torque x
velocidade. Em baixa freqüência, as reatâncias diminuem e a corrente na máquina pode
alcançar valores elevados, de forma que esse tipo de controle baseado na simples redução de
freqüência não é muito utilizado (SIMÃO & ALMEIDA NETO, 2002).
O fluxo e o torque diminuem se a freqüência for elevada acima do seu valor nominal.
Se a velocidade síncrona correspondente à freqüência nominal for chamada velocidade base
b, a velocidade síncrona em qualquer outra freqüência torna-se ωm = b ⋅ ωb .
Assim, pode-se concluir que o torque máximo é inversamente proporcional ao
quadrado da freqüência e Tm ⋅ b 2 permanece constante, similar ao comportamento das
máquinas CC em série. A máquina neste tipo de controle opera no modo de enfraquecimento
de campo. Para b>1 a capacidade de torque é limitada pois a máquina sendo operada a tensão
terminal constante tem seu fluxo reduzido. Para b<1 a máquina é normalmente operada a
fluxo constante, reduzindo-se a tensão terminal Va (Tensão do estator) juntamente com
freqüência, de tal forma que o fluxo permaneça constante.
47
2.6.4 CONTROLE DA TENSÃO E DA FREQUÊNCIA
Mantendo-se constante a relação entre a tensão e a freqüência da alimentação do
motor, o fluxo de entreferro não se altera, de modo que o torque máximo não se altera. A
Figura 2.14 mostra a característica torque x velocidade para uma excitação exemplificando
este tipo de controle (POMÍLIO, 2006).
Figura 2.14 - Característica torque - velocidade com controle de tensão x freqüência (POMÍLIO, 2006).
Para velocidades abaixo da base este tipo de acionamento é aplicado, pois a tensão
nominal da máquina não deve ser ultrapassada. O inversor controlado por modulação de
largura de pulso é o acionador empregado para ajustar simultaneamente a freqüência e a
tensão mantendo a relação constante.
A queda de tensão na impedância série do estator em função da redução da
freqüência diminui o fluxo no entreferro provocando à redução na tensão aplicada sobre a
reatância de magnetização e, portanto à necessidade de se elevar a tensão em tais situações
para se manter o torque (POMÍLIO, 2006).
As curvas características típicas torque x velocidade são mostradas na Figura 2.14. À
medida que a freqüência é reduzida, b diminui e o escorregamento para o torque máximo
aumenta. A velocidade pode ser controlada variando-se a freqüência para uma dada demanda
de torque. Portanto, a velocidade e o torque podem ser controlados variando-se tanto a
freqüência quanto à tensão. O torque normalmente é mantido constante, enquanto a
velocidade é variada. A tensão à freqüência variável pode ser obtida a partir de inversores
trifásicos ou ciclo conversores.
Três configurações possíveis de circuitos para variação de freqüência e tensão são
ilustradas na figura 2.15. Na Figura 2.15a, a tensão CC permanece constante e a técnica PWM
é aplicada para variar tanto a tensão quanto a freqüência do inversor. Devido ao retificador
48
com diodos, não é possível a regeneração e o inversor geraria harmônicos na alimentação CA.
Na figura 2.15b, o chopper varia a tensão CC para o inversor e este controla a freqüência ao
mesmo tempo em que reduz a injeção de harmônicos na alimentação CA.
Na Figura 2.15c, a tensão CC é variada pelo conversor dual e a freqüência é
controlada pelo inversor. A regeneração é permitida nesta configuração porém em especial
quando o ângulo de disparo é alto, o fator de potência de entrada do conversor é baixo.
Figura 2.15 - Acionamento de máquina de indução com fonte de tensão (SIMÃO & NETO ALMEIDA,
2002).
49
2.6.5 CONTROLE DA CORRENTE
Variando-se a corrente do rotor pode-se controlar o torque do motor. No entanto, o
controle direto pode ser obtido através do acesso a corrente do estator. A corrente e o torque
produzido podem ser rescritos como:
Ir =
jI i ⋅ X m
Rs +
Rr
+ j( X m + X s + X r )
s
3Rr ⋅ ( X m ⋅ I i )
Td =
s ⋅ ωs
2
R
Rs + r
s
(2.36)
2
+ (X m + X s + X r )
2
(2.37)
O torque de partida (s=1) é dado por:
Ts =
3Rr ⋅ (( X m ⋅ I i )
[
2
ω s ( R s + R r )2 + ( X m + X s + X r )2
]
(2.38)
O escorregamento para o torque máximo é:
sm =
Rr
Rs + ( X m + X s + X r )
2
2
(2.39)
Desprezando o efeito da impedância do estator, o torque máximo é expresso por:
2
3 ⋅ Lm
2
Tm =
⋅ Ii
2(Lm + Lr )
(2.40)
A Figura 2.16 mostra a característica torque x velocidade para diferentes valores de
corrente de entrada.
50
Figura 2.16 - Característica torque - velocidade com acionamento por controle de corrente (POMÍLIO,
2006).
O torque máximo é praticamente independente da freqüência. No entanto na partida
com o escorregamento unitário o valor
Rr
é reduzido, de forma que a corrente que segue
s
pela indutância de magnetização é baixa sendo responsável pela produção de um pequeno
fluxo e, conseqüentemente, um pequeno torque. O fluxo e o torque caminhando no sentido da
saturação do material ferromagnético à medida que a máquina se acelera o escorregamento
diminui e aumentam a corrente de magnetização.
Com o intuito de se evitar a saturação, o motor geralmente é acionado na região
instável da curva torque x velocidade, o que se torna possível apenas com controle de sobre
tensão terminal da máquina e em malha fechada.
Uma corrente com valor eficaz constante pode ser suprida por inversores de corrente,
garantindo-se em um barramento CC uma fonte de corrente contínua, realizada por um
indutor tendo como função o controle da corrente. Desde que o inversor seja preparado para
tal situação técnicas tipo PWM também são possíveis. Para tanto as chaves devem ser capazes
de bloquear tensões com ambas as polaridades e permitir a condução de corrente em um único
sentido.
Variando-se a corrente de entrada, que é prontamente acessível, em vez da corrente
do rotor. A corrente do rotor depende dos valores relativos das impedâncias de magnetização
e do circuito do rotor, quando se tratar de uma corrente de entrada fixa (SIMÃO &
ALMEIDA NETO, 2002).
Sabe-se que o torque máximo depende do quadrado da corrente e é aproximadamente
independente da freqüência. As curvas características torque-velocidade típicas são mostradas
51
na Figura 2.17. Como a reatância de magnetização (Xm) é grande em relação aos valores das
reatâncias de estator (Xs) e rotor (Xr), o torque de partida é baixo.
A tensão no estator cresce e o torque aumenta à medida que a velocidade aumenta ou
o torque diminui. A corrente de partida é pequena devido ao fato dos baixos valores de fluxo,
pois a corrente de magnetização Im é baixa e o valor de Xm é grande. O torque aumenta com a
velocidade devido ao aumento do fluxo. Um aumento ainda maior na velocidade, na direção
da inclinação positiva das curvas características, aumenta a tensão terminal além do valor
nominal. O fluxo e a corrente de magnetização também são aumentados, levando dessa forma
à saturação. Pela corrente do estator e o escorregamento o torque pode ser controlado. Para
evitar à saturação devido à tensão elevada e manter o fluxo no entreferro constante a máquina
normalmente é operada na inclinação negativa da curva característica torque x velocidade, no
controle de tensão. A máquina tem de ser operada com controle de malha fechada pois a
inclinação negativa encontra-se na região instável. A um baixo escorregamento, a tensão
terminal poderia ser excessiva e o fluxo saturaria. Devido à saturação, o torque máximo seria
melhor que o mostrado na Figura 2.17.
Figura 2.17 - Curvas características torque-velocidade para controle da corrente (SIMÃO & ALMEIDA
NETO, 2002).
Através de inversores trifásicos tipo fonte de corrente, pode-se fornecer corrente
constante. As vantagens de controle de corrente de falta e da corrente ser menos sensível às
variações dos parâmetros da máquina pode ser obtido com um inversor alimentado por
corrente, embora exista a questão da geração de harmônicos e pulsação de torque.
Na Figura 2.18 são mostrados duas configurações de acionamentos com inversores
alimentados por corrente. Na Figura 2.18a o indutor age como fonte de corrente controlada
pelo retificador controlado, sendo que nesse tipo de arranjo o fator de potência de entrada é
considerado muito baixo. Na figura 2.18b, o fator de potência de entrada é maior e o chopper
controla a fonte de corrente.
52
Figura 2.18 - Acionamento da máquina de indução do tipo fonte de corrente (SIMÃO & ALMEIDA
NETO, 2002).
2.6.6 CONTROLE DE TENSÃO, FREQUÊNCIA E CORRENTE.
O controle de velocidade por meio de variação da tensão, corrente e freqüência, fazse necessário nos casos em que se deseja obter certos requisitos de torque x velocidade.
Existem três regiões de operação da máquina de indução ilustradas na figura 2.19. Na
primeira a velocidade pode ser variada através do controle da tensão (ou da corrente), a um
torque constante. Na segunda a máquina é operada a uma à corrente constante e o
escorregamento é variado. Na terceira a velocidade é controlada pela freqüência a uma
corrente reduzida no estator.
Figura 2.19 - Variável controlada em função da freqüência (SIMÃO & ALMEIDA NETO, 2002).
.
53
Para
> 1, a máquina opera em tensão constante, portanto o fluxo diminui quando a
freqüência aumenta e a máquina opera no modo de enfraquecimento de campo.
Quando da operação como motor, uma diminuição da referência de velocidade
diminui a freqüência da alimentação, isso muda a operação para modo de frenagem
regenerativa. Sob a presença do torque frenante e da carga o acionamento desacelera. Para
velocidades abaixo do valor nominal
a tensão e a freqüência são reduzidas para manter o
fluxo constante ou a desejada relação
V
f mantendo a operação nas curvas de torque
velocidade com uma inclinação negativa, limitando a velocidade de escorregamento. Acima
da nominal , para manutenção da velocidade de operação, apenas a freqüência é reduzida, na
parte das curvas de torque x velocidade com uma inclinação negativa. Quando estiver
próximo da velocidade desejada, a operação vai para o modo motor e o acionamento
acomoda-se na velocidade desejada.
Quando da operação como motor, um aumento na referência de velocidade aumenta
a freqüência de alimentação. O torque da máquina excede o torque de carga e esta desacelera.
A operação é mantida na parte das curvas com inclinação negativa em função do
escorregamento, sendo que o acionamento estabiliza-se na velocidade desejada (SIMÃO &
ALMEIDA NETO, 2002).
2.7 INVERSORES
2.7.1 INVERSORES DE CORRENTE
O uso de inversores de corrente ocorre principalmente em aplicações de grande
potência, nas quais não é necessária uma rápida resposta dinâmica, tais como: ventiladores e
bombas, guindastes, esteiras rolantes, acionamento de veículos pesados.
Dada a alta potência envolvida, soluções topológicas que utilizam SCR´s e GTO´s
(Gate Turn-Off Thyristors) são interessantes. No primeiro caso (SCR´s) como a alimentação é
em corrente contínua, faz-se necessário o uso de algum tipo de comutação forçada para
permitir o desligamento dos tiristores. Com GTO’s é possível utilizar técnicas do tipo PWM.
A tensão observada na entrada das máquinas é praticamente senoidal. Este fato indica
o uso destes conversores para o acionamento de máquinas elétricas (especialmente as de
54
construção mais antiga) cuja isolação da fiação, em função do isolante utilizado, não admite
taxas de variação da tensão (
dV
) muito elevadas (POMÍLIO, 2006).
dt
Uma estrutura básica de um sistema de acionamento em corrente é ilustrada na figura
2.20. O retificador de entrada ajusta o nível de corrente contínua sobre a indutância L.
O circuito de comando do inversor determina na saída do inversor a freqüência dada
as correntes alternadas. Este inversor pode possuir diferentes topologias, como se verá a
seguir.
Esta estrutura permite, pelo ajuste adequado do ângulo de disparo da ponte
retificadora, a regeneração de energia, a energia retirada do motor acionado pode refluir para a
rede, desde que a tensão média na saída do retificador seja negativa.
Figura 2.20 - Estrutura básica de sistema para acionamento em corrente de máquina CA (POMÍLIO,
2006)
2.7.2 INVERSORES DE TENSÃO
As topologias dos inversores de tensão utilizadas no acionamento de máquinas
elétricas não possuem diferenças significativas em relação àquelas já descritas para a
realização de inversores de freqüência fixa. O circuito de controle quando produz um sinal de
referência de freqüência variável é que na realidade os diferencia (POMÍLIO, 2006).
O inversor trifásico de tensão, com forma de onda retangular na saída, é uma das
estruturas mais empregadas na indústria, é normalmente aplicado em altas potências. Sua
popularidade deve-se em princípio pelo fato de ser um eficiente meio de se obter tensões
trifásicas com freqüência controlável.
55
A estrutura básica do inversor trifásico de tensão é apresentada na Figura 2.21. Para
cargas indutivas faz-se necessário à adição de seis diodos colocados em antiparalelo com cada
chave comandada, gera-se um interruptor bidirecional em corrente, que permite a circulação
de corrente durante a abertura das chaves.
Esses diodos desempenham o papel de roda-livre para a circulação da corrente de
carga. A nova estrutura, assim concebida, adquire a forma apresentada na Figura 2.22. Ela é
constituída por três braços inversores em meia ponte, onde cada braço representa uma fase do
sistema estático trifásico, que é conectado à carga trifásica. A carga trifásica alimentada por
esse sistema é em geral balanceada.
Figura 2.21 - Estrutura básica do inversor trifásico de tensão (BARBI & MARTINS, 2005).
Figura 2.22 - Inversor trifásico de tensão com diodos de roda-livre (BARBI & MARTINS, 2005).
O funcionamento básico do inversor trifásico é essencialmente o mesmo do inversor
monofásico em ponte. Para se conseguir o efeito de ponte trifásica, cada terminal de saída de
cada braço inversor é conectado alternadamente, a cada meio período, no terminal positivo e
negativo da fonte de alimentação CC.
56
A tensão de saída trifásica é obtida preservando um ângulo de defasagem de 120º
entre as seqüências de chaveamento de cada braço inversor. Desse modo, tem-se pra cada
braço inversor, uma tensão de saída que se encontra 120º atrasada em relação ao braço
inversor chaveado anteriormente, e 120º adiantada em relação ao braço inversor chaveado
posteriormente, de forma a se produzir o mesmo comportamento dos sistemas trifásicos
convencionais.
O inversor trifásico de tensão em ponte apresenta dois tipos de operação. O tipo 180º,
onde cada chave comandada conduz por 180º, e o tipo 120º, onde cada chave conduz por
apenas 120º de cada semiperíodo. O tipo 180º é em geral o mais empregado por dois motivos:
1º) as chaves semicondutoras são mais bem aproveitadas quando operam conduzindo por
180º;
2º) no tipo 180º a forma de onda de tensão de saída não é afetada pela natureza da carga.
2.7.2.1 INVERSOR DE TENSÃO TRIFÁSICO TIPO 120º
Este modo de operação não é tão empregado como o tipo 180º. A estrutura de
potência é a mesma do inversor trifásico tipo 180º, com a única diferença que cada chave
controlada conduz por apenas 1/3 do período de operação do conversor, ou seja, 120º. Por
essa razão o nome do inversor trifásico tipo 120º.
Desse modo, há um intervalo de 60º entre os comandos de duas chaves controladas
pertencentes a um mesmo braço do inversor. Por conseguinte, em qualquer instante de tempo
somente duas chaves controladas estão conduzindo, um grupo positivo (S1, S2, S3) e outra do
grupo negativo (S4, S5, S6).
Os comandos das chaves controladas de um dado braço são defasados de 120º em
relação aos comandos dos braços vizinhos.
2.7.2.2 SEQUÊNCIA DE FUNCIONAMENTO
Há seis seqüências de operação em um período da forma de onda da tensão alternada
de saída. Em cada seqüência duas chaves controladas permanecem em condução, conectando
dois dos terminais da carga aos terminais da fonte de alimentação CC, enquanto o terceiro
terminal permanece flutuando.
57
Figura 2.23 - Circuito de potência do inversor de tensão trifásico em ponte tipo 120º(BARBI &
MARTINS, 2005).
A cada intervalo de 60º uma chave controlada é colocada em condução, obedecendo
a uma seqüência apropriada a fim de gerar um sistema de tensões trifásicas balanceadas
defasadas de 120º. A freqüência de chaveamento define a freqüência da tensão de saída. A
Figura 2.24 apresenta, na forma de diagrama, a seqüência de chaveamento do inversor
trifásico de tensão em ponte tipo 120º representado na Figura 2.23.
Verifica-se pelo diagrama de seqüência de chaveamento da Fig. 2.24 que a
possibilidade de curto-circuito neste modo de operação é muito remota, dado o fato que há um
intervalo relativamente grande de T/6, ou seja, 60º entre a ordem de bloqueio de uma chave e
a ordem de entrada em condução da outra chave, ambas pertencentes ao mesmo braço do
inversor. Essa característica representa uma grande vantagem deste tipo de controle. Como a
chave controlada conduz por apenas 120º elas são, portanto, menos utilizadas quando
comparadas com as do inversor tipo 180º. Essa técnica representa um meio simples de
redução da tensão na carga sem alterar a tensão de entrada.
Figura 2.24 - Diagrama de seqüência de chaveamento do inversor de tensão trifásico em ponte tipo
120º(BARBI & MARTINS, 2005).
58
2.7.2.3 INVERSOR DE TENSÃO TRIFÁSICO TIPO 180º
Neste caso cada chave comandada é mantida em condução durante 180º. Os
comandos das duas chaves de um mesmo braço inversor são complementares. Os comandos
das chaves de um braço são defasados de 120º em relação aos comandos das chaves do braço
vizinho. A partir dessa estratégia de comando a tensão de saída é imposta a todo instante,
qualquer que seja a natureza da carga.
A estrutura de potência do inversor trifásico tipo 180º é a mesma apresentada na
Figura 2.26, onde as chaves comandadas (S1-S6) podem ser tiristores ou GTO´s (para altas
potências na faixa de MW), ou transistores (TBP, MOSFET ou IGBT – para baixas e médias
potências). Em aplicações nas quais, pelo nível de potência, se exige o uso de tiristores, estes
devem ser acompanhados de seus respectivos circuitos de comutação forçada.
A carga pode ser ligada em estrela (Y) ou em triângulo (∆). Para uma carga ligada
em estrela, as tensões fase-neutro devem ser determinadas de modo a encontrar as correntes
de linha (ou fase). Para uma carga ligada em triângulo, as correntes de fase podem ser obtidas
diretamente a partir das tensões de linha.
2.7.2.4 SEQUÊNCIA DE FUNCIONAMENTO
O inversor trifásico de tensão em ponte da Figura 2.26 é, de fato, a composição de
três inversores monofásicos de meia ponte. No braço R, para o primeiro meio período, a chave
S1 permanece em condução, enquanto S4 fica bloqueada.
Já no meio período seguinte há uma inversão no comando das chaves, e assim S1
permanece aberta, enquanto S4 mantém-se conduzindo. As chaves do braço S operam da
mesma maneira, exceto pelo fato que o comando das mesmas está defasado de 120º, ou seja,
1/3 de período, em relação a R.
Operação similar ocorre com o braço T, sendo que o comando das chaves desse
braço está defasado de 120º em relação ao braço S. Desse modo, as chaves semicondutoras
são comandas segundo o diagrama representado na Figura 2.25.
Observa-se que há seis seqüências distintas de operação em cada período de
funcionamento. Em cada seqüência existem sempre três chaves em condução, duas no grupo
positivo e uma no grupo negativo, ou vice-versa.
59
A duração de cada seqüência é de 60º. Portanto, os sinais de comando das chaves
estáticas são defasados de 60º uns dos outros a fim de se obter tensões trifásicas
(fundamentais) balanceadas.
As chaves do grupo positivo têm um dos seus terminais ligado ao pólo positivo da
fonte de alimentação CC. As chaves do grupo negativo têm um dos seus terminais ligado ao
pólo negativo da fonte de alimentação CC. Para construção do diagrama da Figura 2.25, as
seguintes regras devem ser obedecidas:
1ª) Entre duas chaves de um mesmo braço, cada uma conduz por 180º, dos 360º
correspondentes a um período completo de forma de onda alternada;
2ª) Entre duas chaves, de braços distintos, há uma defasagem de 120º.
Pelo diagrama assim construído pode-se estabelecer a seqüência correta de
fechamento e abertura das chaves comandadas.
Figura 2.25 - Diagrama de comando do inversor trifásico de tensão tipo 180º(BARBI & MARTINS, 2005).
Figura 2.26 - Inversor trifásico de tensão tipo 180º(BARBI & MARTINS, 2005).
60
Figura 2.27 - Principais formas de onda (BARBI & MARTINS, 2005).
61
2.7.2.5 INVERSOR PWM
Um inversor de freqüência PWM realiza o controle da freqüência e da tensão na
seção de saída do inversor. A tensão de saída tem uma amplitude constante enquanto que a
tensão média é controlada pela modulação por largura de pulso.
O inversor básico converte a tensão de entrada de 60 Hz para tensões e freqüências
variáveis sendo que a freqüência variável é que efetivamente controlará a velocidade do
motor.
A durabilidade e desempenho do motor podem ser afetados por tensões de saída não
senoidais resultantes do chaveamento do inversor. A obtenção de formas de onda alternadas
com baixo conteúdo harmônico é extremamente importante, já filtros não podem ser
empregados com sucesso, dada a grande variação de freqüência de saída do inversor.
Desta forma, a lógica de disparo das chaves do inversor é de fundamental
importância na eficiência e no desempenho do sistema de acionamento.
As técnicas de chaveamento modernamente utilizadas fazem uso da modulação por
largura de pulso, que possibilitam a obtenção de formas de onda de tensão de saída de baixo
conteúdo harmônico. Dentre elas, pode-se destacar o PWM senoidal, cuja filosofia será
demonstrada na seqüência (SIMÃO & ALMEIDA NETO, 2002).
2.8 MODULAÇÃO
Para que se entenda como funciona esta tecnologia no controle de potência, parte-se
de um circuito muito simples formado por um interruptor capaz de chavear de forma rápida
uma carga a ser controlada, de acordo com a figura 2.28.
Figura 2.28 – Controle da corrente na carga com abertura e fechamento do interruptor
Quando o interruptor está aberto, à potência imposta a carga é nula pois não existe
circulação de corrente.
62
No entanto a potência aplicada à carga é máxima no instante em que o interruptor é
fechado, pois a tensão integral da fonte é recebida pela carga.
Para obter uma potência intermediária, diga-se 50% aplicada à carga, faz-se com que
a chave seja aberta e fechada rapidamente de modo a ficar 50% do tempo aberta e 50%
fechada. Isso significa que, em média será obtida a metade do tempo com corrente e metade
do tempo sem corrente, ilustrada na Figura 2.29.
Figura 2.29 – Tensão média obtida a partir do controle de abertura e fechamento da chave.
A potência média é, portanto obtida em função da tensão média imposta a carga que
neste caso caracterizou-se como sendo 50% da tensão de entrada.
Nota-se que o interruptor fechado torna-se responsável pela definição da largura do
pulso em relação ao tempo em que fica nesta condição, e um intervalo entre pulsos quando
permanece aberto. A freqüência de corte é definida pelo período composto pela somatória dos
dois tempos.
A relação entre o tempo em que o pulso é mantido e a duração de um ciclo completo
de operação do interruptor define o ciclo ativo, conforme é ilustrado na Figura 2.30.
Figura 2.30 – Ciclo ativo
Variando-se a largura do pulso e também o intervalo, de modo a terem-se ciclos
ativos diferentes, pode-se controlar a potência média aplicada a uma carga. Assim, quando a
63
largura do pulso varia de zero até o máximo, a potência também varia na mesma proporção,
conforme representado na Figura 2.31.
Figura 2.31 – Controle da potência pelo ciclo ativo
Este princípio é usado justamente no controle PWM: modula-se a largura do pulso de
modo a controlar o ciclo ativo da tensão média imposta à carga e conseqüentemente a
potência aplicada a ela.
Na prática, o interruptor é um componente de estado sólido capaz de chavear o
circuito de forma rápida como, por exemplo, um IGBT, TBP ou FET.
Com a implementação de um oscilador o componente ou dispositivo pode ter seu
ciclo ativo controlado numa grande faixa de valores. A obtenção de duração zero ou 100% do
pulso é muito difícil pois submeteria a o oscilador a uma parada, embora se pode chegar bem
próximo disso.
Um exemplo de aplicação é o que se denomina de “simple magnitude PWM”, onde o
sinal aplicado à carga determina simplesmente a potência que ela deve receber, pela largura
do pulso.
No entanto, existe um segundo tipo de controle PWM denominado “Locked antiphase PWM”, que pode incluir na modulação do sinal informações sobre a potência aplicada à
carga e o sentido da corrente que deve circular por ela. Este tipo de controle, em especial, é
interessante quando se trata de motores elétricos onde o sentido da corrente determina o
sentido da rotação ou do torque.
64
O seu princípio de funcionamento é simples de ser entendido. Se os pulsos impostos
à carga não oscilarem entre a tensão de 0V e um valor máximo de tensão, mas sim entre uma
tensão negativa e uma tensão positiva (-V a +V), o ciclo ativo determina também o sentido de
circulação da corrente pela carga.
Se, por exemplo, o ciclo ativo for de 50% conforme representado na Figura 2.32, a
tensão média na carga, e, portanto a potência, será zero.
Figura 2.32 Locked Anti-phase PWM
Agora, variando o ciclo ativo para mais e para menos de 50%, ter-se-á uma
predominância dos pulsos positivos ou negativos de modo que a tendência da corrente média
será de circular em um determinado sentido ou noutro, de acordo com a mesma Figura 2.32.
Portanto, conforme o ciclo ativo do sinal aplicado, neste tipo de circuito, a corrente
na carga irá variar entre menos 100% e mais 100%, em função do ciclo ativo do sinal
aplicado.
2.8.1 PWM SENOIDAL
Nesta técnica, os pulsos que controlam as chaves do inversor são gerados a partir da
comparação de uma onda portadora triangular de alta freqüência Vp, com a onda senoidal de
referência (onda moduladora) Vr, cuja freqüência é a desejada para a tensão de saída do
conversor. Os pontos de intersecção entre as ondas portadora e moduladora definem a lógica
de disparo dos dispositivos de potência do inversor, de acordo com a Figura 2.33. Quando Vr
(onda senoidal de referência) é maior que Vp (triangular), a saída do comparador determina
que a chave semicondutora correspondente entre em condução; porém quando Vr é menor que
Vp a chave em questão é bloqueada (SIMÃO & ALMEIDA NETO, 2002).
65
Figura 2.33 – Geração de pulsos de comando do inversor (SIMÃO & ALMEIDA NETO, 2002).
Observando-se a Figura 2.33, nota-se que a resultante dos intervalos entre os
sucessivos cruzamentos da senóide e a onda de referência triangular definem a largura de cada
pulso de comando das duas chaves semicondutoras. Pode-se afirmar que a largura do pulso é
praticamente proporcional à ordenada média da senóide em cada intervalo. Quanto maior a
freqüência da portadora, mais próxima da forma de onda ideal para esse PWM, uma vez que
menor será a variação da amplitude da senóide em cada intervalo e, portanto, a largura de
cada pulso será uma função senoidal da posição angular. Em torno da freqüência de
chaveamento, considerando um PWM senoidal, surgem na tensão de saída as menores ordens
harmônicas. Nos inversores atuais devido ao fato da utilização de IGBT´s obtém-se variações
de freqüência em torno de 5 kHz a 20kHz o que naturalmente elimina as componentes
harmônicas de baixa ordem otimizando a operação do motor. As harmônicas de ordem
elevada da tensão gerada não representam grande problema, já que a própria indutância do
motor impede a entrada de suas respectivas correntes.
Um outro aspecto importante relativo à caracterização da tensão de saída do inversor
é a relação entre as amplitudes das ondas de referência e portadora, denominado índice de
modulação. À medida que este índice cresce a partir do zero, as larguras de cada pulso vão
aumentando, aumenta-se o valor eficaz de cada onda de tensão gerada. Quando o índice
ultrapassa a unidade a amplitude da onda senoidal torna-se maior que a onda triangular, e por
não existirem mais chaveamentos nesta região, recortes da onda vão deixando de acontecer
(SIMÃO & ALMEIDA NETO, 2002).
A sobre modulação é a denominação atribuída a esta condição de operação em que é
permitida a geração de tensões de saída maiores que o valor eficaz e com maior conteúdo
66
harmônico de baixa ordem. Dada à limitada tensão disponível no “link DC”, o recurso da
V
sobre modulação torna-se necessário, por exemplo, na operação com f constantes, em
velocidades maiores.
Figura 2.34 - Sobre modulação do PWM Senoidal (SIMÃO & ALMEIDA NETO, 2002).
Um inversor VSI-PWM, através de uma malha de realimentação de corrente, pode
oferecer uma corrente de saída controlada. As correntes aplicadas ao estator do motor de
indução, desde que o inversor opere com elevada freqüência, podem ser ajustadas
rapidamente em fase, amplitude e freqüência.
2.8.2 VANTAGENS DO INVERSOR PWM
O inversor pode alcançar uma eficiência superior a 90% à velocidade plena e plena
carga. Possibilita a partida suave do motor, reversão de rotação além de eliminar a presença de
engrenagens para obtenção de variação de velocidade.
O inversor pode ser testado e operado sem estar fisicamente conectado ao motor e
ainda em algumas aplicações evitar sobrecargas causadas pela aceleração de cargas de alta
inércia. Mais de um motor podem ser operados a partir do mesmo inversor e ainda não ser
sensível à alteração da combinação dos motores operados, desde que a corrente de carga total
não exceda a corrente nominal do inversor (SIMÃO & ALMEIDA NETO, 2002).
Durante a operação de um controle PWM na condição de aberto, corrente alguma
circula pelo dispositivo, e quando fechado em teoria apresenta resistência nula e
conseqüentemente queda de tensão nula não dissipando potência.
Embora na prática isso efetivamente não ocorra, em teoria os controles PWM não
dissipam potência alguma consistindo em soluções ideais para aplicações de controle.
67
Na realidade, os dispositivos usados no controle não são capazes de comutar o
circuito em um tempo instantâneo, pois requerem certo tempo para mudar de estado e, neste
intervalo de tempo, sua resistência eleva-se de um valor muito pequeno até um valor
extremamente alto e vice-versa, conforme ilustrado na curva de comutação demonstrada na
Figura 2.35.
Figura 2.35 Nos intervalos tr e tf o dispositivo gera calor em boa quantidade
Nos intervalos de tempo de subida e descida tanto a queda de tensão quanto a de
corrente podem gerar uma boa quantidade de calor conforme a carga controlada.
O processo de chaveamento em função do tempo de resposta do dispositivo, e
principalmente o da freqüência de controle, pode dissipar elevada quantidade de energia em
forma de calor.
Mesmo com esta restrição em relação a um controle linear equivalente, a potência
dissipada em um controle PWM é significativamente menor. Contudo atualmente a
implementação de projetos de controle voltada a potências elevadas realiza-se sem
necessidade de utilização de grandes dissipadores, pois já são comuns no mercado os
transistores de comutação rápidos, FET´s de potência e outros componentes de chaveamento
consideravelmente rápidos.
Outro problema que pode surgir com relação aos transistores de efeito de campo e
bipolares, reside no fato de que quando saturados não se comportam como resistências nulas,
proporcionando quedas de tensão que podem atingir alguns volts.
Portanto, em especial no caso dos FET’s de potência que são, muitas vezes
considerado comutador perfeito, deve-se observar as especificações das resistências de fração
de ohm’s entre o dreno e a fonte (rds on) quando saturados, pois na prática podem significar a
necessidade de dissipadores bem dimensionados.
68
A baixíssima resistência de um FET de potência quando saturado (resistência entre
dreno e fonte no estado on), só é válido para uma excitação realizada com uma tensão
relativamente alta.
Desta forma os transistores bipolares de potência ou mesmo os IGBT´s, dependendo
da aplicação, podem oferecer vantagens mesmo sobre os FET´s de potência.
2.8.3 DESVANTAGENS DO INVERSOR PWM
O custo inicial do sistema do inversor é alto. A potência total distribuída para o
motor deve ser convertida pelo inversor, isso requer componentes de alta potência dentro do
inversor.
O inversor possui uma grande quantidade de circuitos sofisticados que requerem
técnicos especializados para a manutenção (SIMÃO & ALMEIDA NETO, 2002).
2.9 DISPOSITIVOS PARA CHAVEAMENTO
Na Figura 2.36 percebe-se que os tiristores são dispositivos capazes de suportar
elevados valores de tensão e corrente, mas não podem operar em freqüências de chaveamento
elevadas. Os IGBT´s possuem uma capacidade de suportar maiores tensões e atuar em
freqüências maiores que os transistores bipolares de potência e podem também suportar
maiores correntes e tensões que os MOSFET´s de potência. Nota-se que a operação segura do
IGBT é maior que àquelas compreendidas pelo transistor TBP e os MOSFET´s.
Para serem aplicados em sistemas de alta potência, os dispositivos semicondutores
devem, durante o chaveamento, além de operar em altas freqüências, serem capazes de atuar
diante de elevadas tensões reversas e grandes correntes. Dessa forma, os dispositivos
semicondutores, durante o chaveamento, devem possuir baixas perdas de potência.
Os transistores bipolares de potência oferecem muitas vantagens, tais como baixas
perdas em condução, aplicação de baixas correntes de base no controle de altas correntes de
coletor. Porém, quando exigido em relação a correntes altas de base, alta freqüência de
chaveamento desvantagens surgem para certas aplicações.
Os transistores de efeito de campo, MOSFET´s de potência, também oferecem
grandes vantagens quando aplicados em situações que exigem chaveamento realizado em altas
freqüências e também no controle de altas potências, pois exigem tensão de disparo.
69
O IGBT atualmente é um componente que se torna cada vez mais recomendado para
chaveamento das cargas que exigem alta corrente, pois reúne além da facilidade de
acionamento e alta impedância dos MOSFET´s as baixas perdas em condução dos TBP´s.
Figura 2.36 – Limites de Operação
Com o objetivo de especificar as chaves do inversor, foram pesquisados diversos
modelos que estão listados na tabela 2.1.
70
Tabela 2.1: Chaves eletrônicas pesquisadas
MODELO
FABRICANTE
IRF740
International Rectifier
IRF830
International Rectifier
IRF840
International Rectifier
IRFP450
International Rectifier
IRFP460
International Rectifier
IRFPC50
International Rectifier
STW13NB60
IRGP30B60KD
STGW20NC60BD
IRG4PC50UD
ST
International Rectifier
ST
International Rectifier
DESCRIÇÃO
MOSFET com isolação para
400V e Rds(on) = 0,55
MOSFET com isolação para
500V e Rds(on) = 1,5
MOSFET com isolação para
500V e Rds(on) = 0,85
MOSFET com isolação para
500V e Rds(on) = 0,40
MOSFET com isolação para
500V e Rds(on) = 0,27
MOSFET com isolação para
600V e Rds(on) = 0,60
MOSFET com isolação para
600V e Rds(on) = 0,54
IGBT com isolação para
600V e Vce(on) = 1,95V
IGBT com isolação para
600V e Vce(on) = 2,5V
IGBT com isolação para
600V e Vce(on) = 1,65V
Para a especificação do modelo de chave a ser utilizada no protótipo, foram
analisados o critério técnico e a disponibilidade no mercado nacional.
O critério técnico leva em consideração a tensão e dissipação térmica nas chaves.
Como a tensão no barramento é de aproximadamente 310V, optou-se utilizar chaves com
isolação igual ou superior a 500V em função de eventuais spikes de tensão que poderão surgir
em decorrência do chaveamento em alta freqüência sobre o motor, que apresenta um
comportamento indutivo em função do enrolamento do estator, podendo ocasionar a ruptura
da isolação das chaves. Sendo assim, a chave IRF740, a princípio, está descartada.
71
Ela pode ser utilizada somente nos testes finais (capítulo 3) caso fique evidenciado,
através de equipamentos de medição, que não haja tensão maior que 400V sobre as mesmas.
Os IGBT’s foram pesquisados unicamente pela característica de apresentarem isolação alta
(acima de 600V).
No MOSFET, a dissipação térmica está em função da resistência de condução,
Rds(on), ou seja, é proporcional ao quadrado da corrente eficaz.
No IGBT está em função da freqüência de comutação e da tensão de junção,
Vce(on), portanto, é proporcional a corrente média que circula pela chave. A especificação
quanto à dissipação térmica será analisada quantitativamente no capítulo 3.
A questão disponibilidade leva em consideração a facilidade em conseguir as chaves
no mercado nacional. Neste item, os modelos IRFP450, IRFPC50, STW13NB60 e
STGW20NC60BD estão descartados.
A escolha entre os modelos IRF830, IRF840, IRFP460, IRGP30B60KD será
definida no capítulo 3.
2.10 PROCESSADOR DIGITAL DE SINAIS - DSP
A evolução das tecnologias de eletrônica permitiu a popularização de ferramentas
utilizadas para sistemas de controle digitais. Uma dessas ferramentas é o processador digital
de sinais.
Os Processadores Digitais de Sinais, ou DSP (do inglês Digital Signal Processors),
são microprocessadores especificamente projetados para executar em tempo real algoritmos
de processamento digital de sinais que exigem tarefas numéricas intensivas e repetitivas.
Características como arquitetura avançada, processamento paralelo e em pipeline e
instruções dedicadas a processamento digital permitem que esses dispositivos executem
milhões de operações por segundo (TEXAS INSTRUMENTS, 1987).
Para implementar o controle digital no projeto, foi escolhido o DSP MC56F8013,
fabricado pela Freescale Semicontuctors. Esse chip reúne algumas características procuradas
para a aplicação do conversor, que serão descritas nesta seção.
72
2.10.1 DSP – PRINCIPAIS CARACTERÍSTICAS E VANTAGENS
As partes integrantes de qualquer computador, e que também estão presentes nos
DSP’s são:
•
Unidade Central de Processamento (CPU);
•
Sistema de clock para dar seqüência às atividades da CPU;
•
Memória para armazenamento de instruções e para manipulação de dados;
•
Entradas para interiorizar na CPU informações do mundo externo;
•
Saídas para exteriorizar informações processadas pela CPU para o mundo externo;
•
Programa (software) para que o sistema faça alguma coisa útil.
A arquitetura dos DSP´s é projetada e otimizada para realizar operações de
multiplicação e acumulação simultâneas em um único ciclo de clock (instrução MAC).
Essa instrução é a operação fundamental do DSP, pois ela possibilita o
processamento de algoritmos matemáticos com alta velocidade.
Assume-se, como requisito mínimo, que um controlador ou processador só pode ser
um DSP se a sua micro arquitetura implementar por hardware operações MAC
(RODRIGUES & SOUZA Jr., 2005).
A Figura 2.37 mostra a implementação de um filtro digital utilizando a instrução
MAC:
Figura 2.37 – Instrução MAC aplicada ao cálculo de um filtro digital (FREESCALE, 2006a)
73
Estão entre outras características de arquitetura que conferem ao DSP alta
performance as seguintes:
•
Sua Unidade Lógico-Aritmética (ULA) dentro da CPU possui um circuito
multiplicador-acumulador que possibilita a MAC.
•
O barramento da memória de dados é separado do barramento da memória de
instruções do programa (Arquitetura Harvard), permitindo que a CPU acesse as duas
simultaneamente.
•
Disponibilidade de circuitos de acesso direto à memória (DMA, Direct Memory
Access), que permitem os sistemas periféricos acessarem a memória sem utilizar a
CPU.
•
Modos de endereçamento específicos para registradores circulares e pilhas,
endereçamentos paralelos e utilização de ponteiros pré ou pós-incrementáveis.
•
Loops de hardware que permitem repetição de instruções sem necessidade de uma
instrução de retorno.
•
Possui um sofisticado controle do fluxo do programa, que inclui processamento de
interrupções, manejo de pilhas e controle de loop de hardware (FREESCALE,
2006b).
2.10.2 APRESENTAÇÃO DO FREESCALE DSP56F8013
O MC56F8013 é um chip que pertence à família de Controladores Digitais de Sinais
(DSC’s) de 16 bits com núcleos 56800/E. Ele combina, num único chip, o poder de
processamento de um DSP e a funcionalidade de um microcontrolador com um flexível
conjunto de periféricos e facilidade de programação. Devido ao seu baixo custo, flexibilidade
de configuração e código de programa compacto, o MC56F8013 é apropriado para várias
aplicações, incluindo controle industrial, controle de motores, inversores, gerenciamento de
energia e equipamentos médicos (FREESCALE, 2006b).
2.10.3 VISÃO GERAL DO NÚCLEO 56800/E
Entre as características que o núcleo 56800E presente no MC56F8013 oferece podese citar:
• Processador de 16-bits com arquitetura Harvard;
74
• Até 32 milhões de instruções por segundo (MIPS) operando em freqüência de
32MHz (para o MC56F8013);
• Suporte para linguagens de alto nível: a maioria das aplicações pode ser escrita em
linguagem C.
• Um circuito multiplicador-acumulador (MAC) 16x16 bits em um único ciclo;
• Quatro acumuladores de 36 bits cada um;
• Oito estágios de pipeline, que aumentam o desempenho de processamento;
• Buffer circular;
• Alto nível de paralelismo: memória, unidade de execução e periféricos opera
independentemente e em paralelo.
• Hardware looping, entre outros.
2.10.4 PERIFÉRICOS
Os principais periféricos disponíveis no MC56F8013 são (FREESCALE, 2006c):
•
Um módulo de PWM que opera a até 96MHz com 6 canais e 4 entradas para
proteção de Fault;
•
Um módulo com 6 entradas de ADC de 12-bits de resolução e clock máximo de
5,33MHz;
•
Quatro módulos timeres de uso geral com 16 bits cada;
•
Uma Interface de comunicação serial assíncrona;
•
Até 26 portas I/O que podem ser programadas como entrada ou saída;
•
Oscilador interno e um Sistema Gerador de Clock.
A arquitetura de sistema engloba todos os elementos integrados no chip do controlador,
incluindo o núcleo, memórias, periféricos e barramentos necessários para conectá-los.
2.10.5 MEMÓRIA
Esse dispositivo possui:
•
Arquitetura Harvard que permite até 3 acessos simultâneos aos barramentos de
memória e de dados;
•
16KB de memória Flash de programa;
•
4KB de memória RAM de dados e programa.
75
2.10.6 ENCAPSULAMENTO E PINAGEM
O encapsulamento do MC56F8013 é do tipo LQFP (low-profile quad flat pack) com
32 pinos. A pinagem do dispositivo pode ser vista na Figura 2.38.
Figura 2.38 – Encapsulamento e pinagem do DSP56F8013 (FREESCALE, 2006b).
2.10.7 PROGRAMAÇÃO DO MC56F8013
A Freescale™ disponibiliza um ambiente de desenvolvimento para programação,
simulação, depuração e gravação de projetos que utilizem o MC56F8013 denominado
Codewarrior®. Tal ambiente foi criado pela Metrowerks®, empresa associada à Freescale™.
Dentro desse ambiente de desenvolvimento, a programação pode ser feita em
linguagem assembly, contando com o set de instruções do MC56F8013, ou em linguagem C,
já que Codewarrior® possui um compilador dessa linguagem (RODRIGUES & SOUZA Jr.,
2005).
A vantagem de se utilizar o DSP MC56F8013 para a implementação do protótipo
reside no fato de que, ao contrário dos microcontroladores convencionais, este é otimizado a
efetuar cálculos e processamento de sinais em alta precisão e velocidade.
76
Isto se torna imprescindível em um sistema de controle em malha fechada, que
caberá aos trabalhos futuros. Além do mais, sua arquitetura é destinada a comando de
inversores trifásicos em função de apresentar seis saídas de PWM e um sistema de proteção
que desliga automaticamente as saídas PWM quando é detectada uma situação de falta. Há um
set específico de instruções, intrínseca no DSP, que é destinado a controle de motores.
O uso de controlador digital, frente ao analógico, é vantajoso no que diz respeito à
flexibilidade, pois as alterações são facilmente implementadas através do software.
Além do mais, o controlador digital é menos suscetível a temperatura, ruídos e
tolerância dos componentes, além do fato de demandar menos componentes na placa.
2.11 DRIVER
O driver é um circuito de interface, constituído principalmente de transistores e opto
acopladores (caso seja isolado), cuja principal função é adequar nível de tensão e corrente
para proporcionar o chaveamento do MOSFET ou IGBT a partir de um nível lógico gerado
por um DSP, micro controlador ou outro dispositivo. Na Figura 2.39 está representado, de
maneira ilustrativa, a aplicação do driver.
FIGURA 2.39 – Aplicação do driver
A ascensão da eletrônica de potência trouxe consigo uma infinidade de componentes
para as mais diversas aplicações. Entre estes componentes, diversos fabricantes
desenvolveram drivers nos mais variados modelos e tecnologias. Portanto, pode-se encontrar
drivers específicos para cada necessidade.
Para a implementação do protótipo, foram pesquisados diversos drivers que estão
listados na tabela 2.2 com as respectivas características.
77
Tabela 2.2: Drivers pesquisados
MODELO
FABRICANTE
DESCRIÇÃO
Aplicação em braços do tipo Half-Bridge com
L6388
ST
diodo de bootstrap incorporado, 600V de
isolação, proteção contra sub-tensão, cruzamento
de chaves e dead-time ajustável.
HCPL0302
Avago
Technologies
Driver de um canal isolado através de opto-
acoplador interno que garante isolação de até
566V.
Driver de um canal isolado através de opto-
HCPL316J
Avago
acoplador interno que garante isolação de até
Technologies
1200V. Possui proteção contra sub-tensão e
proteção de falta.
IR2112
IR2130
IR2133
International
Rectifier
International
Rectifier
International
Rectifier
Aplicação em braços do tipo Half-Bridge, 600V
de
isolação,
proteção
contra
sub-tensão
e
cruzamento de chaves.
Aplicação em inversores trifásicos, 600V de
isolação, proteção contra sub-tensão, cruzamento
de chaves e falta.
Aplicação em inversores trifásicos, 1200V de
isolação, proteção contra sub-tensão, cruzamento
de chaves e falta.
Os drivers L6388 e IR2112 foram descartados em função da necessidade de se
utilizar três componentes para acionar os três braços do inversor, demandando mais espaço na
placa de circuito impresso.
Os modelos HCPL316J e IR2133 são economicamente inviáveis para a
implementação do protótipo. O HCPL0302 apresenta o inconveniente de ser excitado através
de corrente, necessitando de um amplificador de corrente externo. Sendo assim, o driver 2130
apresenta o melhor custo x benefício entre todos os drivers listados.
78
O IR2130, produzido pela International Rectifier, é um circuito integrado não isolado
que agrupa seis drivers (três independentes e três referenciados ao GND), destinado a inversor
trifásico. Contempla dispositivos de proteção de falta, sub-tensão e cruzamento de chaves.
Desvantagens: não é isolado, não tem tensão negativa nem proteção individual para
cada chave.
Em função das saídas serem independentes, dispensa-se o uso de fontes isoladas
devido à possibilidade de se utilizar circuito de boot_strap. Na figura 2.40 é apresentado o
diagrama de funcionamento do driver IR2130.
Figura 2.40: Diagrama do driver IR2130
79
2.12 SIMULAÇÃO
Com o objetivo de obter, previamente, o comportamento dinâmico do circuito do
inversor, foi utilizado o software Pspice Designer Manager versão 9.2 para a simulação.
Figura 2.41: Circuito simulado no software
80
O processo de modulação em PWM foi obtido através de amplificadores
operacionais na configuração comparadora. Estes amplificadores recebem um sinal dente-deserra em 24kHz na porta inversora e um sinal senoidal na porta não-inversora que representa a
tensão, freqüência e fase de referência.
Os sinais complementares são obtidos através de um par de fontes de tensão
dependentes para cada amplificador operacional, sendo que uma delas inverte a lógica.
O tempo morto, para evitar o cruzamento das chaves, foi obtido através de um
circuito RC (1k e 470pF).
O inversor trifásico foi implementado através de seis chaves, com a designação
Sbreak, que representam um modelo ideal. Cada chave possui um diodo de roda livre para
simular o diodo intrínseco das chaves reais. O motor foi representado por um circuito RL
trifásico conectado em delta.
Apesar do circuito de comando utilizado na simulação ser analógico, não impede que
o modelo seja válido para o processador digital de sinais, pois este fornece os sinais de PWM
através de uma tabela com diversos valores para a razão cíclica que representa a função seno
discretizada.
Portanto, há uma semelhança entre os sinais obtidos na saída do amplificador
operacional e os sinais produzidos pelo DSP.
Nas figuras 2.41 e 2.42, estão representados respectivamente o circuito simulado no
software e as formas de onda de correntes e tensão de linha. Na figura 2.43 estão às formas de
ondas complementares de PWM, responsáveis pelo comando de um dos braços.
81
Figura 2.42: Correntes e tensão de linha obtida na simulação
Figura 2.43: Formas do sinal de PWM complementares
82
2.13 CONCLUSÕES
Neste capítulo foi realizado um estudo sobre acionamento e controle de velocidade
de motores de indução trifásicos, em que se mostraram definições, modelagem matemática,
modulação PWM, dispositivos para chaveamento e principalmente as formas de acionamento
e controle de velocidade dos motores de indução trifásica. A ênfase foi dispensada com
relação aos inversores de tensão, referente aos quais se apresentam as principais vantagens
além das características das principais topologias utilizadas com forma de onda retangular na
saída. Pelo fato de ser uma das estruturas mais empregadas na indústria, normalmente
aplicados em altas potências, um eficiente meio de se obter tensões trifásicas com freqüência
controlável e mais especificamente pelo melhor aproveitamento das chaves semicondutoras
além da forma de onda da tensão de saída não ser afetada pela natureza da carga, é que se
adotou a topologia do inversor de tensão tipo de operação 180º.
Para acionamento dos MOSFET´s, pelo fato de agrupar as funções de proteção de
falta, sub-tensão e cruzamento de chaves em um único encapsulamento, além de
disponibilidade no mercado, ótima relação custo x benefício e baixo número de componentes
externos, o circuito integrado IR2130 foi escolhido para a implementação do protótipo.
O driver IR2130, produzido pela International Rectifier, é um circuito integrado não
isolado que agrupa seis driver’s (três independentes e três referenciados ao GND), destinado a
inversor trifásico. Em função das saídas serem independentes, dispensa-se o uso de fontes
isoladas devido à possibilidade de se utilizar circuito de boot_strap.
Com relação ao processador, foi escolhido para a implementação do protótipo o DSP
MC56F8013, produzido pela Freescale Semiconductors, por razões comerciais tais como:
baixo custo e disponibilidade; somado as vantagens técnicas: seis saídas de PWM
independentes (uma para cada chave do inversor), fault mapeado para desabilitar os sinais de
PWM automaticamente caso algum problema seja detectado, possibilidade de utilizar
compilador em linguagem C e sets de instruções intrínsecas destinadas a controle de motor de
indução. Para realizar o chaveamento no estágio de potência foi escolhido o MOSFET
IRFP460 em função da sua grande capacidade de condução de corrente, tensão máxima de
500V e disponibilidade no mercado.
Por fim foram feitas simulações do inversor de tensão aplicado ao acionamento e
controle de velocidade escalar do motor de indução trifásico com a ajuda de um programa de
simulação de circuitos. Os resultados obtidos foram julgados satisfatórios, de modo que o
próximo passo a ser tomado é a implementação real do inversor de tensão proposto.
83
CAPÍTULO 3
DESENVOLVIMENTO EXPERIMENTAL
3.1 INTRODUÇÃO
Este capítulo apresenta o estudo desenvolvido durante o projeto do conversor CC-CA
trifásico para acionamento e controle escalar de um motor de indução trifásico utilizando um
DSP.
Este estudo é segmentado em etapas, e a primeira delas é a concepção de um circuito
que atenda a todas as especificações de funcionamento propostas.
A penúltima etapa envolve a montagem do protótipo, e por fim a última etapa
composta dos ensaios de desempenho realizados no protótipo, seguida da avaliação dos
resultados obtidos.
3.2 DIAGRAMA DE BLOCOS DO CIRCUITO
A elaboração do circuito do protótipo far-se-á a partir do diagrama em blocos
mostrado na Figura 3.1:
Figura 3.1: Diagrama em blocos do conversor CC-CA trifásico.
O protótipo será alimentado com uma tensão alternada 220 V / 60 Hz monofásica ou
bifásica sendo posteriormente convertida em tensão CC através do conversor CA-CC. Esta
tensão será monitorada através do DSP que, juntamente com a velocidade de referência,
ajustará a freqüência e tensão alternada (controle escalar) para que a velocidade do motor seja
84
a imagem da velocidade de referência. Em função de o controle ser em malha aberta,
eventuais erros em virtude do escorregamento serão tolerados.
O reostato será acionado caso a tensão do barramento ultrapasse certo valor limite
previamente estabelecido que será monitorado pelo DSP. Esta elevação de tensão ocorre
quando o motor atuar como no modo de frenagem (gerador).
3.3 CIRCUITOS
3.3.1 DSP – BLOCO DE CONTROLE DIGITAL E LÓGICA DE COMANDO
Figura 3.2: Esquema da pinagem do DSP.
Este bloco, representado na figura 3.2, compreende o DSP 56F8013 que, através da
lógica implantada, é responsável pelo processamento e monitoração do sistema. Os
processamentos e monitorações efetuados pelo DSP são:
•
aplicação do controle escalar e geração dos sinais de PWM para inversor
trifásico tipo 180º;
•
monitoração da tensão e corrente do barramento CC;
•
lógica para ativação e desenvolvimento das rampas de subida e descida, bem
como a inversão no sentido de giro do motor;
•
lógica para efetuar a interface HM (homem-máquina).
Os sinais de saída e entrada estão mostrados nas tabelas 3.1 e 3.2 respectivamente.
85
Tabela 3.1: Sinais de saída do DSP
PERÍODODE
ATUALIZAÇÃO
/FREQÜÊNCIA
NOME
TIPO DE SINAL
FUNÇÃO
PWMH01
PWMH02
PWMH03
DIGITAL
SINAL DE PWM PARA
CHAVES SUPERIORES
COMANDO
DAS
PWML01
PWML02
PWML03
DIGITAL
SINAL DE PWM PARA
CHAVES INFERIORES
COMANDO
DAS
5 kHz
5 kHz
IOB0 IOB1
IOB2 IOB3 DIGITAL
IOB4 IOB5
SINAIS PARA INTERFACE VISUAL
(INTERFACE HOMEM-MÁQUINA)
16,66 ms
RLR
COMANDO DO RELÉ PARA ACIONAMENTO
DO REOSTATO EXTERNO
16,66 ms
DIGITAL
Tabela 3.2 – Sinais de entrada no DSP
PERÍODO DE
ATUALIZAÇÃO/
AMOSTRAGEM
NOME
TIPO DE SINAL
FUNÇÃO
SHLD
DIGITAL
CHAVE PARA
INVERSOR
SHED
DIGITAL
CHAVE PARA INVERTER O SENTIDO DE
ROTAÇÃO DO MOTOR
FAULT
DIGITAL
SINAL EXTERNO PROVENIENTE DO DRIVER
GERA
QUE INDICA CURTO (FALTA)
INTERRUPÇÃO
AMIBUS
ANALÓGICO
SINAL DE AMOSTRA DA CORRENTE DO
BARRAMENTO CC
521us
AMPOT
ANALÓGICO
SINAL DE AMOSTRA DA TENSÃO DO
POTENCIÔMETRO QUE CARACTERIZA A
VELOCIDADE DE REFERÊNCIA
521us
AMVBUS
ANALÓGICO
SINAL DE AMOSTRA
BARRAMENTO CC
521us
A, B
DIGITAL
SINAIS
DE
ROTATIVO
LIGAR
OU
DESLIGAR
DA
ENTRADA
TENSÃO
DO
DO
ENCODER
TCK TDO
DIGITAL
TMS TDI
SINAIS DO JTAG, NECESSÁRIOS
GRAVAR O FIRMWARE NO DSP
RESET
SINAL PARA INICIAR O DSP
DIGITAL
O
PARA
16,66ms
16,66ms
NÃO
IMPLEMENTADO
9800 bps
GERA
INTERRUPÇÃO
86
3.3.2 DRIVER IR2130
Figura 3.3 – Esquema da pinagem do IR2130.
O driver IR2130, representado no bloco da figura 3.3, tem por finalidade fazer a
interface entre a etapa de potência e a etapa de comando (DSP), adaptando os níveis de tensão
e corrente para o acionamento das chaves. Por se tratar de sinais complementares (conversor
meia ponte), o driver emprega um tempo morto (deadtime) de 1,5us, para evitar o cruzamento
entre as chaves superiores e inferiores.
Apresenta um amplificador operacional interno para amplificação do sinal da
corrente de barramento, adquirida através da queda de tensão no resistor shunt. Possui,
também, um dispositivo de proteção que desliga as chaves caso a tensão sobre o resistor shunt
exceda 0,5V (corrente de curto-circuito ou sobrecarga).
Os sinais de entrada e saídas estão relatados nas tabelas 3.3 e 3.4 respectivamente:
Tabela 3.3: Entradas do driver IR2130
NOME
+15V
GND
VS0
PWMH01, PWMH02,
PWMH03
PWML01, PWML02,
PWML03
ITRIP
VD1, VD2 E VD3
FUNÇÃO
Tensão de alimentação.
Nível de referência da tensão de alimentação.
Nível de referência para as chaves inferiores e entrada da
porta não-inversora do amplificador operacional.
Sinais de PWM para acionamento das chaves superiores
provenientes do DSP.
Sinais de PWM para acionamento das chaves inferiores
provenientes do DSP.
Sinal proveniente da queda de tensão sobre o resistor
shunt, responsável pelo desligamento das chaves caso
exceda 0,5V.
Tensão para acionamento das chaves superiores,
proveniente do circuito de boot_strap.
87
Tabela 3.4: Saídas do driver IR2130
NOME
H01, H02 e H03
VS1, VS2 E VS3
L01, L02 E L03
CACA0
PROT
FUNÇÃO
Sinais de PWM aplicado às chaves superiores.
Nível de referência para as chaves superiores.
Sinais de PWM aplicado às chaves inferiores.
Permite a ligação de resistor para ajustar o ganho do
amplificador operacional.
Saída do amplificador operacional.
Nível lógico que indica situação de curto-circuito.
3.3.3 ESTÁGIO DE POTÊNCIA
Figura 3.4: Estágio de Potência.
Na figura 3.4 estão representados os conjuntos com os três braços do conversor na
configuração meia ponte ( Half Bridge ) responsáveis pelo fornecimento da tensão trifásica.
O fusível F1 é responsável pela proteção de retaguarda, ou seja, caso a lógica do
driver não detecte a falta (curto) este fusível irá romper, protegendo as trilhas do protótipo.
Estão representados nas trilhas de comando:
•
diodos zener’s: Limita a tensão de gate em 18V, evitando que as chaves
sejam danificadas por sobretensão
88
• resistores de pull-down (10k ): Evita que o gate esteja flutuando no momento
em que o barramento CC é energizado.
• resistores de gate (47 ) Tem por objetivo limitar a corrente do driver e
controlar o tempo de fechamento das chaves;
• resistores de gate (10 ) Tem por objetivo controlar o tempo de desligamento
das chaves;
• diodos 1N4148: Promover a seletividade dos resistores de gate.
Os capacitores de 22nF têm por função o desacoplamento da indutância parasita da
trilha do barramento CC.
3.3.4 ACIONAMENTO DO REOSTATO
Figura 3.5: Acionamento Reostato.
Tem por objetivo, através do comando do circuito para acionamento do relé,
transferir a potência do motor para o reostato, evitando a sobretensão no barramento quando o
motor encontrar-se em estado de frenagem.
89
3.3.5 ALIMENTAÇÃO DA ETAPA LÓGICA
Figura 3.6: Alimentação da etapa lógica.
Os capacitores C10 e C20 compõe o circuito de filtragem da tensão de alimentação
do DSP. O C20 é responsável pela filtragem da ondulação em baixa freqüência, em
contrapartida, o C10 é responsável pela atenuação e desacoplamento uma vez que sua resposta
em alta freqüência é maior que o capacitor eletrolítico.
O circuito responsável pela alimentação do conversor analógico digital intrínseco ao
DSP. Os resistores R37 e R28 têm por finalidade promover a barreira de isolação. Esta
barreira de isolação é importante para desvincular as resistências das trilhas, pois o resistor de
1Ω apresenta resistência maior que das trilhas, ou seja, o fluxo de corrente será mais intenso
pelas trilhas (exclusivo), evitando que haja ondulação na entrada de alimentação do circuito
AD.
O capacitor C3 é recomendado pelo fabricante do driver IR2130 através do
respectivo datasheet.
90
3.3.6 CIRCUITO DE INICIALIZAÇÃO DO DSP
Figura 3.7: Circuito de inicialização do DSP.
O capacitor C7 e o resistor R17 são responsáveis pela constante de tempo necessária
para inicialização do DSP através do Reset.
O capacitor C18 é o capacitor necessário ao funcionamento do DSP, segundo o
Datasheet MC56F8013 rev0 3/2005 da FREESCALE.
3.3.7 CIRCUITO PULL-UP DO DRIVER
Figura 3.8: Pull Up do Driver.
Este circuito tem por objetivo evitar a flutuação na entrada do driver IR2130, uma
vez que a lógica do mesmo é invertida. Dessa forma, é garantido que as chaves estejam
desligadas no instante de inicialização do DSP. Caso contrário poderá ocorrer à condução
indesejada das chaves durante a inicialização, vindo a danificar o conversor.
91
3.3.8 CIRCUITO DE GANHO
Figura 3.9: Circuito de Ganho.
Circuito responsável pela determinação do ganho da amostra de corrente através do
Ampop interno do driver IR2130. Os resistores R3 e R2 são responsáveis pelo ganho
enquanto que R4 e Z1 limitam a tensão máxima em 3,3 V.
A queda de tensão em R4, em condições normais torna-se desprezível, uma vez que a
corrente drenada pelo conversor AD é praticamente nula.
3.3.9 CIRCUITO DE BOOT_STRAP
Figura 3.10: Circuito de Boot_Strap.
Tem por finalidade adaptar a referência de tensão para as chaves superiores dos
braços de cada conversor meia ponte, pois as referências dessas chaves estão flutuando.
92
Os resistores R30, R29 e R27 limitam picos de corrente sobre os diodos e capacitores
quando em processo de carga dos capacitores que fornecem energia para os módulos do driver
responsáveis pela ativação das chaves superiores.
Os diodos D7, D8 e D9 bloqueiam a tensão reversa que surge no instante em que as
chaves inferiores (referenciadas ao GND) entram em corte.
Os capacitores eletrolíticos armazenam a tensão necessária para o acionamento dos
módulos dos driver’s superiores, enquanto que os capacitores de multicamada (220nF) são
responsáveis pelo desacoplamento.
3.3.10 CIRCUITO DE ACOPLAMENTO DO SINAL DE FAULT ENTRE O DRIVER E O DSP
Figura 3.11: Circuito de Acoplamento.
Tem por finalidade adaptar o nível de tensão e inverter a lógica do sinal de proteção
de falta proveniente do IR2130, pois o driver é alimentado com 15V enquanto que a tensão
máxima no pino do DSP é de 3,3 V.
O capacitor C17, além de eliminar ruído, promove uma constante de tempo junto
com o resistor R38 que garante a real ativação, ao invés da falsa ativação provocada por
ruídos.
O resistor R5 por sua vez garante que o transistor não fique sensibilizado na presença
de ruídos.
93
3.3.11 FILTRO E GRAMPEADOR DAS AMOSTRAS DE CORRENTE E TENSÃO
Figura 3.12: Filtro e Grampeador.
Os diodos são responsáveis pelo grampeamento da tensão de amostra entre 0V e 3,3
V, enquanto que os capacitores atenuam os ruídos.
3.3.12 CIRCUITO PARA ACIONAMENTO DO RELÉ
Figura 3.13: Acionamento do Relé
Este circuito através do sinal proveniente do DSP fará a saturação do transistor Q1
com o objetivo de excitar a bobina do relé. O resistor R25 tem por finalidade evitar a
flutuação da base do transistor no instante inicial da energização do conversor.
O resistor R1 é responsável pela limitação da corrente de base do transistor Q1.
94
3.3.13 CIRCUITO CONVERSOR CA-CC
Figura 3.14: Circuito Conversor CA-CC
Os diodos D15, D16, D17, D18 e o capacitor C24 tem por objetivo converter a
tensão alternada da rede para uma tensão CC que alimentará o inversor.
O NTC1 tem por finalidade limitar a corrente de pico no instante de ligamento,
evitando que os diodos retificadores D15, D16, D17 e D18 sejam danificados.
O capacitor C24 serve como filtro atenuando a ondulação de tensão e mantendo o
nível CC do barramento praticamente constante.
3.3.14 CIRCUITO PARA RECEPÇÃO DAS AMOSTRAS
Figura 3.15: Circuito para Recepção de Amostras
95
O divisor resistivo formado pelos resistores R44, R45 e R46 tem por finalidade a
amostra de tensão do barramento para o DSP.
O resistor R52 tem por objetivo promover, através da queda de tensão, a imagem da
corrente do barramento para o amplificador operacional do driver que por sua vez amplifica o
sinal para o DSP. O divisor resistivo formado pelos resistores R50 e R51 tem por finalidade a
atuação do fault do driver.
3.3.15 FONTE AUXILIAR CC
Figura 3.16: Fonte Auxiliar
A fonte auxiliar, apresentada na figura 3.16, tem por objetivo suprir tensão para o
adequado funcionamento dos dispositivos de lógica, comando e ventilador.
É constituída de um transformador abaixador de tensão (externo à placa), retificador
de onda completa, filtros capacitivos e reguladores de tensão em cascata.
3.3.16 CIRCUITO PARA ENCODER
Figura 3.17: Encoder
O circuito mostrado na figura 3.17 tem por objetivo promover a conexão e interface
para encoder, necessário para a realimentação da malha de controle da velocidade.
Os diodos zenner’s limitam a tensão em 3,3V, pois o nível de tensão para o
funcionamento do encoder é superior ao tolerado pelo DSP. Os resistores limitam a corrente
sobre os diodos zenner’s.
Apesar de previsto na placa, o circuito não foi implementado.
96
3.3.17 CIRCUITO PARA ACIONAMENTO DO VENTILADOR
Figura 3.18: Acionamento do Ventilador
O circuito, mostrado na figura 3.18 propicia o acionamento do ventilador a partir da
condução do transistor. O transistor é saturado no momento em que uma corrente de base,
proveniente da chave liga/desliga (no painel do equipamento), é imposta. O resistor R39
limita a corrente de base enquanto que o resistor R40 promove uma queda de tensão para que
a tensão de 15V seja atenuada em aproximadamente 12V sobre o ventilador, aumentando a
vida útil do mesmo. O diodo D13 é o diodo de roda livre.
97
3.4 MEMÓRIA DE CÁLCULO
3.4.1CONVERSOR CA-CC
Este conversor tem por objetivo converter a tensão alternada da rede elétrica para
uma tensão contínua através dos diodos retificadores. O capacitor de filtragem tem por
objetivo atenuar a ondulação da tensão do barramento CC que será entregue ao inversor.
Parâmetros de projeto:
Fin = 60 Hz
Vin = 220V
Pout = 460W
N = 90%
Pin = 511W
Ondulação = 10%
3.4.1.1 DETERMINAÇÃO DO FILTRO CAPACITIVO
A especificação do capacitor de filtragem é obtida através da expressão 3.1:
Cf =
Pin
[F]
2
fin × (Vdc 2pk − Vdc mín
)
(3.1)
Sendo:
Cf : Grandeza do capacitor de filtragem (F)
Pin : Potência de entrada (W)
f in : Freqüência da rede de alimentação (Hz)
Vdc pk : Tensão de pico no barramento CC (V)
Vdc min : Tensão mínima no barramento CC (V)
V pk = 2 × Vin
Vdc min = V pk ×
2 × 220 ∴V pk = 311V
100 − ∆V(%)
100
311 ×
100 − 10)
∴Vdc min ≅ 280V
100
98
Substituindo na expressão 3.1:
Cf =
511
∴ C f = 465uF
60 × (3112 − 280 2 )
Adotando-se um valor comercial: Cf = 470uF
O capacitor deve suportar uma tensão igual ou superior a 311V. Por se tratar de um
dispositivo para controle de velocidade de motor de indução, poderá haver uma elevação na
tensão do barramento durante a frenagem do motor. Por este motivo, adotou-se um valor
comercial de 450V.
Cf = 470uF/450V
3.4.1.2 DETERMINAÇÃO DOS DIODOS DE RETIFICAÇÃO
É utilizada a topologia em ponte completa para o processo de retificação da tensão da
rede elétrica.
O primeiro passo para a especificação dos diodos é a determinação do tempo de
condução. Este tempo é obtido através da expressão 3.2:
tc =
Vdc min
arccos(
)
Vdc pk
(2 × π × fin)
[s]
(3.2)
Sendo:
tc : Tempo de condução dos diodos (s)
Vdcmin : Tensão mínima no barramento CC (V)
Vdc pk : Tensão de pico no barramento CC (V)
f in : Freqüência da rede de alimentação (Hz)
Substituindo os valores:
99
tc =
(
arccos 280
)
311 ∴ t = 1,12ms
c
(2 ⋅ π ⋅ 60)
O próximo passo é a determinação da corrente de pico que passará através dos
diodos. Esta corrente é obtida através da expressão 3.3:
Id pk =
Cf × (Vdc pk − Vdc mín )
tc
[A]
(3.3)
Sendo:
Id pk : Corrente de pico nos diodos (A)
tc : Tempo de condução dos diodos (s)
Vdcmin : Tensão mínima no barramento CC (V)
Vdc pk : Tensão de pico no barramento CC (V)
C f : Capacitor de Filtro (µF)
Substituindo os valores:
Id pk =
470 x10 −6 × (311 − 280 )
∴ Id pk = 13 A
1,12ms
A corrente média é obtida através da expressão 3.4:
Id med =
Pin
2 × Vdc min [A]
(3.4)
100
Sendo:
Id med : Corrente média nos diodos (A)
Vdcmin : Tensão mínima no barramento CC (V)
Pin : Potência de Entrada (W)
Empregando os valores de projeto:
Id med =
511
∴ Id med = 0,91A
2 × 280
A tensão reversa dos diodos deverá suportar a tensão de pico da rede e do barramento
CC. Estipula-se um valor mínimo de 500V em função do aumento de tensão provocado pelo
processo de frenagem do motor.
Adotando-se diodos 1N5408 por suportar as grandezas determinadas.
A determinação do resistor para limitar a corrente de rush ( I rush ) pode ser obtido
através da expressão 3.5:
R rush ≥
V
pk
Irush
[ ]
(3.5)
max
Sendo:
V pk : Tensão de pico da rede de alimentação(V)
Irushmax : Máxima corrente de rush suportado pelo diodo (A)
Rrush : Resistor para limitar I rush ( )
O diodo 1N5408 suporta uma corrente de rush máxima na ordem 200A. Especifica-se
Irushmax = 35A para garantir uma margem de folga.
101
Substituindo os valores:
Rrush ≥
311
∴Rrush ≥8, 9Ω
35
Adotando-se valor comercial de 10
e tecnologia NTC para evitar perdas em regime
permanente.
3.4.2 CONVERSOR CC-CA TRIFÁSICO
3.4.2.1 DIMENSIONAMENTO DAS CHAVES
O conversor CC-CA trifásico ou inversor trifásico é constituído de três inversores
meia ponte, tendo ao total de seis chaves.
Os esforços das chaves estão em função da tensão de barramento e da corrente eficaz
que circula por cada uma.
A magnitude da corrente de linha em plena carga é:
I
lef
=
Pout
3 × V × n × cos φ
=
368
3 × 220 × 0,8 × 0,8
= 1,51A
Através da expressão 3.6, segundo (BARBI & MARTINS, 2005), é determinada a
corrente eficaz por chave:
I Sef =
I lef
(3.6)
2
Sendo:
I lef : Corrente eficaz de linha ou fase (A)
I Sef : Corrente eficaz por chave (A)
I Sef =
I lef
2
=
1,51
2
= 1,07 A
A máxima tensão permitida no barramento é de 400V.
Chave utilizada: IRFP460
102
3.4.2.2 DIMENSIONAMENTO DOS RESISTORES DE GATE
Os resistores de gate tem por finalidade limitar a corrente de carga das capacitâncias
parasitas dos MOSFET’s e promover o tempo de corte e condução das chaves, evitando dV/dt
elevado.
Os tempos de corte e condução são expressos através da expressão 3.7;
t f = t r = 2,2 × R g × C iss
(3.7)
Sendo:
t f = Tempo da rampa de condução (s)
t r = Tempo da rampa de corte (s)
Rg = Resistor de gate ( )
Ciss = Capacitância intrínseca da chave (F)
Através do datasheet do IRFP460, obtemos Ciss = 4200pF
O tempo de corte desejado é de 430ns, pois é um tempo suficiente para que a
capacitância da chave complementar descarregue.
430 × 10 −9 = 2,2 × R g × 4200 × 10 −12 ∴ R g = 46,54Ω
Resistor de gate (condução): 47
Entretanto, deseja-se que o tempo de desligamento da chave corte, seja o mais rápido
possível. Para tanto, estima-se em torno de 100ns para evitar dV/dt elevado.
100 × 10 −9 = 2,2 × R g × 4200 × 10 −12 ∴ R g = 10,82Ω
Resistor de gate (corte): 10
103
Para promover os tempos distintos, fez-se necessário a introdução de um diodo
conforme a figura 3.19.
Figura 3.19: Resistores de gate e diodo
3.4.2.3 CIRCUITO DE BOOT_STRAP
Dimensionar o circuito de boot_strap consiste em determinar os capacitores e diodos
do circuito.
O método foi seguido conforme design tips, DT04-4 ver A, de autoria do próprio
fabricante do driver. Este método consiste da seguinte expressão 3.8:
Qbs = 2 × Qg +
I qbs
fs
+
I dgs
fs
+
I rpd
fs
(3.8)
Sendo:
Qbs : Carga elétrica solicitada do circuito de boot_strap (C);
Qg : Carga elétrica necessária ao gate da chave (C) – datasheet da chave;
I qbs : Corrente quiescente solicitada pelo driver (A) – datasheet do driver;
I ebs : Corrente de dispersão entre gate e source (A) – datasheet da chave;
I rpd : Corrente do resistor de pull-down (A);
f s : Freqüência de chaveamento do PWM.
104
A corrente drenada através do resistor de pull-down é:
I rpd =
Vcc 15
=
= 1,5mA
R pd 10k
Substituindo valores na expressão:
Qbs = 2 × 130.10 −9 +
Qbs = 566nC
30.10 −6 100.10 −9 1,5.10 −3
+
+
5.10 3
5.10 3
5.10 3
O capacitor de boot_strap é determinado a partir da expressão 3.9:
C bs =
Qbs
Vcc − V f − Vceon − V ge min
(3.9)
Sendo:
Cbs : Capacitor de boot_strap (F);
Qbs : Carga elétrica solicitada (C);
Vcc : Tensão de alimentação do driver (V);
V f : Queda de tensão direta sobre o diodo de boot_strap (V);
Vceon :Tensão entre dreno e source da chave inferior em condução (V);
Vge min : Mínima tensão de gate (V).
C bs =
566.10 −9
15 − 0,7 − 1 − 12
C bs = 435nF
Conforme orientação do fabricante, coloca-se um capacitor eletrolítico e um
capacitor de multicamada em paralelo para desacoplamento.
Capacitores utilizados: 1µF eletrolítico e 220nF multicamada.
105
3.4.3 FONTE AUXILIAR
A fonte auxiliar tem por objetivo suprir tensão contínua e regulada para os circuitos
de comando e lógica.
É constituído de um transformador para reduzir o nível de tensão da rede elétrica de
220V para 16V+16V. Um conversor CA-CC retifica e filtra a tensão ao mesmo tempo em que
reguladores de tensão mantêm nível constante. Na figura 3.20 é apresentado um diagrama de
blocos da fonte auxiliar.
Figura 3.20: Diagrama em blocos da fonte auxiliar
3.4.3.1 DETERMINAÇÃO DO TRANSFORMADOR DA FONTE
Especificações:
Potência aparente = 15VA;
Tensão primário = 127V / 220V;
Tensão secundário = 16V + 16V / 8V
Carretel 26x26 – Área da perna central = A = 6,76 cm2;
Lâminas Aço Silício = EI-254;
Indução Magnética = B = 1x104 gauss;
Freqüência = 60 Hz.
Cálculo do número de espiras do enrolamento primário:
V = 127V
N=
V
127
=
= 650espiras
−8
4,82 × F × A × B × 1x10
4,82 × 60 × 6,76 × 1x10 4 × 1x10 −8
106
V = 220V − 127V = 93V
N=
V
93
=
= 475espiras
−8
4,82 × F × A × B × 1x10
4,82 × 60 × 6,76 × 1x10 4 × 1x10 −8
Cálculo do número de espiras do enrolamento secundário:
V = 16V
N=
V
16
=
= 82espiras
−8
4,82 × F × A × B × 1x10
4,82 × 60 × 6,76 × 1x10 4 × 1x10 −8
V = 8V
N=
V
8
=
= 41espiras
−8
4,82 × F × A × B × 1x10
4,82 × 60 × 6,76 × 1x10 4 × 1x10 −8
Cálculo da corrente no enrolamento secundário:
P = 10VA
I =
P 10
=
= 0 , 625 A
V
16
P = 5VA
I=
V = 16V
V = 8V
P 5
= = 0,625 A
V 8
107
Cálculo da corrente no enrolamento primário:
V = 127V
I=
P 15
=
= 0,118 A
V 127
P = 15VA
I=
V = 220V
P 15
=
= 0,068 A
V 220
Determinação das bitolas dos fios para cada enrolamento:
Utilizando como referência a densidade de corrente prática de
300 A
cm 2
:
Tabela 3.5: Determinação das Bitolas dos Fios
φ (cm)
0,023
Bitola AWG
31
0,018
33
2,08 x10 −3
0,051
24
0,625A
2,08 x10
−3
0,051
24
0,625A
2,08 x10 −3
0,051
24
Tensão (V)
127V
Corrente (A)
0,118A
220V
0,068A
0,226 x10
16V
0,625A
16V
8V
2
Área do fio ( cm )
0,393 x10 −3
−3
Na prática utilizaram-se as bitolas 25 e 30 AWG.
3.4.4 CONVERSOR CA-CC DA FONTE AUXILIAR
Este conversor CA-CC de onda completa, através dos diodos retificadores e do
capacitor de filtragem converte, a tensão alternada proveniente do transformador, para uma
tensão contínua que alimenta os reguladores.
O dimensionamento deste conversor foi realizado através dos seguintes parâmetros
definidos na tabela 3.6:
108
Tabela 3.6: Parâmetros da fonte auxiliar
Descrição
Ondulação máxima
Tensão nominal de entrada
Símbolo
V(%)
Vin
Grandeza
30%
16V+16V
Freqüência nominal da tensão de entrada
f in
60Hz
Máxima tensão CC
Vdc pk
22V
Mínima tensão CC
Vdc min
15V
O valor do capacitor de filtragem pode ser obtido através da relação 3.10.
Cf =
Pin
2
fin × (Vdc 2pk − Vdc mín
)
(3.10)
Substituindo os valores:
Cf =
15
60 × (22 2 − 15 2 )
Cf = 965µF
Adotando-se um valor comercial de 1000uF/35V tipo eletrolítico.
Um capacitor de 100nF/50V, de tecnologia multicamada, é colocado em paralelo
para atenuar eventuais ruídos.
Os diodos de retificação são especificados através das correntes médias, correntes de
pico e tensão reversa. O tempo de recuperação é desprezado por se tratar de uma retificação
de tensão alternada de baixa freqüência.
O tempo de condução é obtido através da expressão 3.11:
tc =
Vdc mín
arccos(
)
Vdc pk
(2 × π × fin)
[s]
(3.11)
109
Sendo:
tc : Tempo de condução dos diodos (s)
Vdcmin : Tensão mínima no barramento CC (V)
Vdc pk : Tensão de pico no barramento CC (V)
f in : Freqüência da rede de alimentação (Hz)
Substituindo os valores:
15
)
22
tc =
(2 × π × 60)
arccos(
tc = 2,18ms
A corrente de pico é obtida através da expressão 3.12:
Id pk =
Cf × (Vdc pk − Vdc mín )
tc
[A]
(3.12)
Sendo:
Id pk : Corrente de pico nos diodos (A)
tc : Tempo de condução dos diodos (s)
Vdcmin : Tensão mínima no barramento CC (V)
Vdc pk : Tensão de pico no barramento CC (V)
C f : Capacitor de Filtro (µF)
Substituindo os valores:
Id pk =
1000 × 10 −6 × (22 − 15)
∴ Id pk = 3,21A
2,18 × 10 −3
110
A corrente média é obtida através da expressão 3.13:
Id med =
Pin
2 × Vdc mín [A]
(3.13)
Sendo:
Id med : Corrente média nos diodos (A)
Vdcmin : Tensão mínima no barramento CC (V)
Pin : Potência de Entrada (W)
Empregando os valores de projeto:
Id med =
15
∴ Id med = 0,5A
2 × 15
A tensão máxima reversa é a tensão de pico entre as saídas do transformador, ou
seja:
Vrev max = Vin × 2 ∴Vrev max = 45,25V
Adotando-se diodos 1N4007
3.4.4.1 REGULADOR 15V
Este regulador tem por objetivo manter um nível de tensão constante de 15V. Foi
especificado o regulador LM7815 devido ao fato deste CI fornecer até 1A de corrente em
regime permanente. Para manter um nível de tensão estável e confiável, foi introduzido um
capacitor eletrolítico de 100uf/50V e um capacitor de multicamada de 100nF/50V na saída do
regulador para atenuar eventuais ondulações e ruídos.
3.4.4.2 REGULADOR 3,3V
Este regulador tem por objetivo manter um nível de tensão constante de 3,3V. Foi
especificado o regulador LDV1086V33 devido ao fato deste CI fornecer até 2A de corrente
em regime permanente. Para manter um nível de tensão estável e confiável, foi introduzido
um capacitor eletrolítico de 100uf/50V e um capacitor de multicamada de 100nF/50V na saída
do regulador para atenuar eventuais ondulações e ruídos.
111
3.5 PROGRAMA IMPLEMENTADO NO DSP 56F8013
O programa foi desenvolvido em linguagem C, no ambiente de programação e
depuração CodeWarrior®, disponibilizado pela empresa Metrowerks®.
A Figura 3.21 mostra as entradas e saídas do programa.
Figura 3.21: Estrutura de entradas e saídas do programa
Têm-se como entradas as amostras do circuito, potenciômetro e chaves da interface
homem-máquina, e a principal saída é para o driver que irá comandar as chaves do circuito do
inversor.
Primeiramente configuram-se todos os registradores necessários e inicializa-se todos
os periféricos que serão utilizados. Isto inclui o conversor A/D, o PWM, o temporizador
watchdog e as interrupções utilizadas.
A principal interrupção utilizada é a interrupção de Timer_0, que acontece a cada
521us. Nessa interrupção é realizado o tratamento de todos as amostras dos AD’s e gerada a
máquina de estados com 32 posições. Nestes estados, estão as rotinas de monitoração da
tensão e corrente de barramento, controle escalar, interface homem-máquina e comando do
relé para ativação do reostato.
112
Existe uma outra interrupção que é a interrupção de Timer_1, necessária à
atualização dos registradores de PWM. O período desta interrupção é variável conforme a
freqüência da tensão de saída determinada na rotina de controle.
A interrupção de fault do PWM é chamada toda vez que o nível no pino
correspondente esteja alto (pino 18).
Tabela 3.7 – Resumo dos eventos do software
Freqüência de trabalho do DSP
32MHz
Período de instrução
31,25ns
Freqüência de chaveamento do PWM
5kHz
Freqüência de amostragem
1920kHz
Tempo de conversão analógico-digital
Nome da
Freqüência da
interrupção
interrupção
3us
Tarefa da interrupção
Iniciar a conversão AD
Timer_0
1920kHz
PWM Fault
Evento externo
Tratamento das amostras
Máquina de Estados
Desliga o PWM
Timer_1
Variável
Atualiza o valor PWM
113
Figura 3.22: Fluxograma do Software
114
Figura 3.23: Fluxograma do Software
115
Para verificação da lógica implantada no DSP, primeiramente, foi utilizado o Kit
MC56F8013DEMO desenvolvido pela própria Freescale. Este kit é constituído de um DSP
56F8013 e diversos componentes de sinalização. Os resultados obtidos através do kit têm por
objetivo a verificação dos sinais de PWM, que através de um filtro RC (passa-baixa), é
possível visualizar as senóides trifásicas. O esquema utilizado para este teste está mostrado na
figura 3.24. Na figura 3.25, está mostrado as formas de onda de tensão de saída obtidas no
teste para os diversos valores de freqüência e tensão.
O kit foi utilizado, exclusivamente, no auxílio ao desenvolvimento do software.
Figura 3.24: Esquema do teste da etapa lógica utilizando o KIT MC56F8013DEMO.
Figura 3.25: Formas de onda obtidas no KIT MC56F8013
116
3.6 MONTAGEM DO PROTÓTIPO
Para a montagem do protótipo, foi desenvolvida uma placa de circuito impresso
principal, na qual são montadas além dos componentes de potência e demais componentes, as
placas de suporte para DSP.
3.6.1 PLACA DE SUPORTE PARA O DSP
O DSP 56F8013 é um componente que tem característica de SMD (surface mount
device). Essa tecnologia traz como principal vantagem à miniaturização do componente.
Porém, para fins de protótipo desse trabalho, foi necessária uma adaptação para “troughhole”, que facilita o trabalho do layout da placa maior e pode ser mais facilmente manuseada.
A adaptação foi feita utilizando-se uma placa de suporte que imita um componente
DIP com 40 pinos, como mostra a Figura 3.26.
Figura 3.26: Placa de adaptação do DSP 56F8013
117
3.6.2 TRANSFORMADOR DA FONTE AUXILIAR
Figura 3.27: Transformador da fonte auxiliar 16V +16V.
Para alimentar o DSP e o circuito driver foi necessária a utilização de uma fonte
auxiliar, como já descrito anteriormente.
3.6.3 LAYOUT DA PLACA PRINCIPAL
O esquema elétrico e o desenho da placa de circuito impresso foram desenvolvidos
com o auxílio do programa Protel Design Explorer 99 SE.
Foi desenvolvida uma placa de face dupla de 150x200 mm, vista nas figuras 3.28 e
3.29.
118
Figura 3.28: Layout da placa principal – Toplayer.
Figura 3.29: Layout da placa principal – BottomLayer
119
3.6.4 PLACA MONTADA
As imagens da placa montada com os componentes são apresentadas na figura 3.30.
Figura 3.30: Placa Montada.
3.6.5 DADOS DE PLACA DO MOTOR
Figura 3.31: Placa Motor.
120
3.6.6 ENSAIO PRÁTICO DO PROTÓTIPO EM BANCADA
Figura 3.32: Ensaio Prático do Protótipo
Figura 3.33: Ensaio Prático do Protótipo
121
3.7 RESULTADOS EXPERIMENTAIS
Os resultados experimentais obtidos do protótipo do conversor controlado
escalarmente são mostrados nesta seção. A verificação da operação do protótipo foi focada na
comprovação da manutenção da relação V/f . Ao analisar os resultados, percebe-se que as
formas de onda de tensão trifásica de fato obedecem uma relação constante entre a amplitude
de tensão e a freqüência.
3.7.1 FORMAS DE ONDA RELACIONANDO A TENSÃO E A FREQUÊNCIA
Figura 3.34: Tensões de linha a 65 Hz
Na Figura 3.34 o traço 1, 2 e 3 respectivamente definem as tensões de linha VAB,
VBC e VCA, enquanto que o traço 4 define a corrente na fase A.
A Figura 3.35 ilustra as formas de onda da tensão e corrente de saída do conversor
em relação à freqüência, sendo respectivamente: (a) tensões de linha a 10 Hz, (b) tensões de
linha a 20 Hz, (c) tensões de linha a 30 Hz, (d) tensões de linha a 40 Hz, (e) tensões de linha a
50 Hz, (f) tensões de linha a 60 Hz.
122
Figura 3.35: Tensões de linha em relação às respectivas freqüências ajustadas.
123
3.7.2 VALORES OBTIDOS NA PRÁTICA RELACIONANDO A TENSÃO E A FREQUÊNCIA
Tabela 3.8: Relação V/f
A variação da relação V/f é realizada linearmente até a freqüência base (nominal) do
motor. Acima dessa, a tensão é máxima (igual a nominal) e permanece constante, havendo
apenas a variação da freqüência aplicada ao enrolamento estatórico do motor conforme obtida
na tabela 3.8 a partir da freqüência de 51 Hz; uma vez que a tensão de linha eficaz máxima
que se conseguiu obter no protótipo foi 188 Vrms.
No intervalo de freqüência de 10 Hz até aproximadamente 0,5 Hz, através do
software, aplicou-se mais tensão no estator do motor para compensar a queda de tensão e
manter o fluxo no entreferro próximo a nominal.
Abaixo da freqüência de 0,5 Hz, também via software, forçou-se a condição de
nenhum valor de tensão aplicado ao estator do motor.
124
3.7.3 GRÁFICO DA CURVA V/F
Figura 3.36: Gráfico que relaciona a tensão e a freqüência.
Região A (51 Hz a 65 Hz): Caracteriza-se a chamada região de enfraquecimento de
campo, pois ali o fluxo decresce com o aumento da freqüência provocando também a
diminuição do torque;
Região B (10 Hz a 51 Hz): Caracteriza-se a chamada região de linearidade, típica do
controle escalar, na qual a relação tensão pela freqüência é mantida constante;
Região C (0,5 Hz a 10 Hz): Caracteriza-se a chamada região em que a queda de
tensão no enrolamento do estator do motor torna-se significativa em relação à tensão aplicada
ao estator pelo conversor provocando a diminuição do torque.
125
3.8 CONCLUSÃO
Este capítulo apresentou todo o projeto, implementação e testes do conversor CC-CA
aplicado ao controle escalar de velocidade de um motor de indução trifásico. A
implementação do controle foi feita utilizando-se o DSP 56F8013 da Freescale.
O projeto envolveu o desenvolvimento do circuito, dimensionamento dos
componentes de lógica e potência, cálculo dos circuitos aplicados, desenvolvimento dos
algoritmos de modulação e desenvolvimento de rotinas do programa.
Além disso, o projeto envolveu o desenvolvimento de uma placa de circuito impresso
para a implementação do conversor. Construído o protótipo, foram realizados testes para a
análise do controle de velocidade e reversão de um motor de indução trifásico.
No ensaio pôde-se verificar o correto funcionamento do protótipo, e na análise das
formas de onda obtidas conseguiu-se atingir o controle de velocidade escalar. Foi feita a
análise das formas de onda da tensão e corrente de saída do conversor, evidenciando assim a
manutenção do torque disponível.
Foi feita então a análise do desempenho das proteções de curto e falta, limite de
corrente de entrada através da proteção automática de fault do DSP.
Assim, podem-se verificar os aspectos estudados na teoria sobre o conversor CC-CA
aplicado ao controle escalar comprovando o sucesso do protótipo.
126
CAPÍTULO 4
CONSIDERAÇÕES FINAIS
Neste trabalho foram realizados estudos sobre acionamentos de motores de indução
trifásicos, em que se mostraram definições e as principais desvantagens e vantagens de cada
tipo de controle.
O controle escalar V/f traz benefícios diretamente associados à
utilização dos MIT. Apresentaram-se as principais vantagens do MIT em relação às máquinas
CC.
Estudaram-se as características das principais topologias utilizadas para conversores
aplicados aos inversores, e pôde-se determinar o método mais adequado para a implementação
de um protótipo com as características de operação desejadas – o conversor CC-CA trifásico.
O funcionamento deste conversor foi detalhado, e entre os componentes do circuito de
potência, o circuito de boot_strap que irá determinar a referência para as chaves superiores.
Assim, é apresentado também o projeto do transformador utilizado na fonte auxiliar.
Em seguida foi apresentado o estudo feito sobre estratégias de controle e
características do acionamento. O protótipo projetado e implementado possui controle escalar,
através do método de manutenção da relação V/f constante.
Para a implementação dos PWM´s escolheu-se o DSP 56F8013 da Freescale.
Buscou-se conhecer o DSP escolhido através do manual do fabricante que contempla todas as
informações de funcionamento e todos as características que este possui.
Foram então feitas simulações do conversor CC-CA aplicado à obtenção do sinal
trifásico a ajuda de um programa de simulação de circuitos. Os resultados obtidos foram
julgados satisfatórios.
No capítulo 3 foi apresentado todo o projeto do protótipo a ser implementado: a
concepção do circuito, o dimensionamento dos componentes, o cálculo dos circuitos
aplicados, o cálculo dos retificadores, a implementação no programa dos PWM´s e o layout da
placa do protótipo. Explorou-se alguns conceitos da implementação da comutação para
melhorar a performance das chaves, como o filtro, a máquina de estados.
Elaborou-se um código de programa completo para o controle do protótipo em
linguagem C, utilizando-se o ambiente de desenvolvimento CodeWarrior.
Após a montagem do protótipo, embora o circuito tenha sido dimensionado para um
motor de até 0,5CV, como tínhamos em mãos um motor de menor, foram realizados ensaios
127
com um motor de indução trifásico de 0,33 CV envolvendo testes de desempenho
principalmente do controle de velocidade. O protótipo se comportou de forma satisfatória nos
ensaios.
Entre os experimentos realizados no protótipo destaca-se principalmente a
verificação das formas de onda de saída do conversor na região das baixas freqüências,
implementação de rampas de aceleração e desaceleração e na inversão do sentido de rotação
do motor. Assim, puderam-se observar claramente os benefícios citados no estudo a respeito
do controle de velocidade escalar de um motor de indução trifásico.
O reostato não foi acionado, pois o motor durante os testes esteve sendo acionado
apenas à vazio e portanto não houve retorno de tensão para o inversor.
Houve grande dificuldade em se obter as medições da tensão de linha aplicada no
estator do motor, mesmo com multímetro true rms e/ou osciloscópio digital utilizado nas
demais medições devido a componente de alta freqüência 5 kHz aplicada ao chaveamento
PWM do conversor.
As medições para levantamento do gráfico com a curva V/f foram obtidas com a
utilização de um filtro LC que pode de certa forma ter influenciado na obtenção da tensão de
linha eficaz.
Conseguiu-se obter tensões de linha de no máximo 188V o que justifica no
gráfico V/f a tensão ter ficado constante no intervalo de 51 Hz à 65 Hz.
Para trabalhos futuros, sugere-se a implementação de um controle por malha fechada,
utilizando um encoder no eixo do motor. Sugere-se também o projeto de um conversor
elevador de tensão para atender o controle na região de enfraquecimento de campo.
128
5 REFERÊNCIAS
[1].
BARBI, Ivo & MARTINS, Denizar Cruz. Eletrônica de Potência – Introdução ao
Estudo dos Conversores CC-CA. Florianópolis: Edição dos Autores, 2005.
[2].
POMILIO, José Antenor. Conversores CC-CA para acionamento de máquina
trifásica.
Apostila
Didática.
Disponível
em:
http://www.dsce.fee.unicamp.br/~antenor/. Acessado em: Março de 2007.
[3]
WEG. Guia Técnico – Motores de Indução Alimentados por Conversores de
Freqüência
PWM.
Rev.
09/2006.
Disponível
em:
http:
//www.weg.com.br/extras/downloads/art_tecnicos/motores_de_inducao_alimentados_
por_conversores_de_frequencia_PWM.pdf. Acessado em: Março de 2007.
[4].
FREESCALE. DSP56F8013 Data Sheet. Rev. 5 4/2006. Disponível em:
www.freescale.com. Acessado em: Março de 2007.
[5].
RODRIGUES, Renato Paixão & SOUZA Jr., José Carlos de. Controlador Digital de
Sinais: Família 56F800/E, baseado no MC56F8013 – Micro arquitetura e Prática.
São Paulo: Érica, 2005.
[6].
SIMÃO, Eduardo Borges & ALMEIDA NETO, Manoel Ferreira de. Rendimento do
Conjunto Inversor / Motor de Indução sob Diferentes Condições de Carga. 2002.
Monografia (Graduação em Engenharia Elétrica), Universidade Federal de Goiás
Escola de Engenharia Elétrica.
[7].
Data Sheet IR2130 – Data Sheet No. PD60019, Disponibilizado em
http://www.irf.com/product-info/datasheets/data/ir2130.pdf , acessado em 15/05/07.
[8].
GARCIA, Ariovaldo V. Motor de Indução. Rev. 08/1998 P Disponibilizado em
http://www.dsce.fee.unicamp.br/~sato/ET515/node67.html , acessado em Março de
2007.
129
APÊNDICES
APÊNDICE 1 – ESQUEMÁTICO COMPLETO DO CIRCUITO
130
ANEXOS
ANEXO 1 – FOLHA DE DADOS DO DRIVER UTILIZADO
131
ANEXO 2 – FOLHA DE DADOS DO MOSFET UTILIZADO
132