INVERSORES PARA VEÍCULOS ELÉTRICOS: APLICAÇÃO DO CONTROLE
VETORIAL SEM SENSOR PARA UM MOTOR DE INDUÇÃO
Camila Barreto Fernandes
Projeto de Graduação apresentado ao Curso de
Engenharia Elétrica da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Engenheiro.
Orientador: Luís Guilherme Barbosa Rolim
Rio de Janeiro
Fevereiro de 2015
INVERSORES PARA VEÍCULOS ELÉTRICOS: APLICAÇÃO DO CONTROLE
VETORIAL SEM SENSOR PARA UM MOTOR DE INDUÇÃO
Camila Barreto Fernandes
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO CURSO
DE ENGENHARIA ELÉTRICA DA ESCOLA POLITÉCNICA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS
NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE ENGENHEIRO
ELETRICISTA.
Examinada por:
______________________________________________
Prof. Luís Guilherme Barbosa Rolim, Dr.-Ing.
______________________________________________
Prof. Walter Issamu Suemitsu, Dr. Ing.
______________________________________________
Prof. Júlio César de Carvalho Ferreira, M.Sc.
RIO DE JANEIRO, RJ - BRASIL
FEVEREIRO de 2015
Fernandes, Camila Barreto
Inversores para Veículos Elétricos: Aplicação do Controle
Vetorial sem Sensor a um Motor de Indução / Camila Barreto
Fernandes,
–
Rio
de
Janeiro:
UFRJ/
ESCOLA
POLITÉCNICA, 2015.
VII, 54 p.: il.; 29,7 cm.
Orientador: Luís Guilherme Barbosa Rolim.
Projeto de Graduação – UFRJ/ POLI/ Engenharia Elétrica,
2015.
Referências Bibliográficas: p. 53-54.
1. Controle Vetorial sem Sensor. 2. Inversores para
Veículos Elétricos. 3. Acionamento de Motor de Indução. I.
Luís Guilherme Barbosa Rolim. II. Universidade Federal do
Rio de Janeiro, UFRJ, Engenharia Elétrica. III. Inversores
para Veículos Elétricos: Aplicação do Controle Vetorial sem
Sensor a um Motor de Indução.
i
Ao meu avô Edson Barreto,
que sempre olhou por mim e guiou meus passos.
ii
Agradecimentos
Agradeço a todos que fizeram parte dessa conquista. Àqueles que estavam desde
o começo, àqueles que chegaram depois. Aos que passaram e aos que ficaram.
Agradeço a minha família que esteve ao meu lado. Em especial, agradeço a
minha mãe que sempre apoiou meus estudos, insistiu pra que eu não desistisse e tornou
financeira e emocionalmente viável essa realização.
Agradeço ao Ricardo, meu parceiro, companheiro e melhor amigo, pela força,
pela compreensão e por estar ao meu lado e me apoiar em todos os momentos.
A todos os professores pelos ensinamentos e em especial ao meu desorientador
Guilherme Rolim pela paciência, por ter acreditado em mim durante os anos de trabalho
e por ter possibilitado meu intercâmbio e crescimento profissional. Ao professor Sérgio
Sami por todos os problemas burocráticos resolvidos quando coordenador, aos
professores Antônio Lopes e Tatiana Assis pela inspiração, ao professor Jorge Luiz
pelas discussões político-filosóficas e à secretária Katia pela atenção e dedicação.
A todos os amigos que me acompanharam nessa batalha. Em especial a Helena
do Valle pelos anos de discussão sobre o ser/estar regadas a suco de goiaba, pelos dias
montando experimentos que não funcionaram, pelas risadas dentro e fora de hora. Aos
demais amigos que estiveram nesta luta comigo: Fábio Padovani, Clarissa Eccard,
Gustavo Pacheco dentre outros. Aos amigos do Lafae Rafael Rodrigues e Luiz
Fernando Vieira que também proporcionaram tardes e noites de boas discussões. E aos
amigos de fora da UFRJ, perdão pelas recusas enquanto desenvolvia este projeto.
Por fim, agradeço ao CNPq e à Decania do CT, na gestão do professor Walter
Suemitsu, pelo financiamento da minha pesquisa.
iii
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte
dos requisitos necessários para a obtenção do grau de Engenheira Eletricista.
INVERSORES PARA VEÍCULOS ELÉTRICOS: APLICAÇÃO DO CONTROLE
VETORIAL SEM SENSOR A UM MOTOR DE INDUÇÃO
Camila Barreto Fernandes
Fevereiro/2015
Orientador: Luís Guilherme Barbosa Rolim
Curso: Engenharia Elétrica
Atualmente os veículos elétricos para transporte de passageiros são de grande interesse,
devido à preocupação crescente com os problemas ambientais causados pela emissão de
CO2 na atmosfera, dada pela queima de combustíveis fósseis. Os veículos elétricos e
híbridos de passeio tornaram-se uma realidade na Europa e América do Norte e
começam a ser comercializados no Brasil. Neste projeto a tecnologia empregada para
propulsão elétrica nesses veículos é estudada, visando a sua internalização em futuros
projetos da UFRJ. Partindo de uma breve revisão dos dispositivos disponíveis
comercialmente para a aplicação em questão, são sintetizados os principais
conhecimentos requeridos para sua implementação. São mostrados os tipos de motores
utilizados em tração elétrica, assim como os inversores que condicionam a energia das
baterias que os alimentam e fazem seu acionamento e controle. Algumas técnicas
usadas no acionamento dos motores de corrente alternada são apresentadas e validadas
com o auxílio de ferramentas de software de simulação. Um teste prático com um motor
de indução de baixa potência e um protótipo de inversor programável é feito para
complementar o estudo.
Palavras-chave: Veículos Elétricos, Inversores de Tração, Motor de Indução, Controle
Vetorial, Acionamento sem Sensor.
iv
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Electrical Engineer.
INVERTERS FOR ELECTRIC VEHICLES: SENSORLESS FIELD ORIENTED
CONTROL OF INDUCTION MOTOR
Camila Barreto Fernandes
February/2015
Advisor: Luís Guilherme Barbosa Rolim
Course: Electrical Engineering
Currently, the interest in electric vehicles for passenger transportation is growing,
because of the concern about environmental problems caused by the emission of CO2
into the atmosphere, given by burning fossil fuels. Electric and hybrid vehicles have
become a reality in Europe and North America and they have being sold in Brazil since
2014. In this project, the technology used for electric drives in such vehicles is studied,
aiming at its internalization in future projects at UFRJ. After a brief review of
commercially available devices for this application, the key topics required for its
implementation are summarized. Types of motors used in electric traction, as well as the
inverters that drive and control them, are shown. Some techniques used in ac motor
drives are presented and validated with the help of simulation software tools. A practical
test with a low-power induction motor and a programmable inverter prototype is
designed to complement this study.
Keywords: Electric Vehicle, Traction Inverter, Induction Motor, Field Oriented Control,
Sensorless Drive.
v
Sumário
Introdução ..................................................................................................................................... 1
Objetivos ....................................................................................................................................... 2
PARTE I – Revisão sobre Inversores para Tração Elétrica ............................................................. 3
1.
Visão Geral ........................................................................................................................ 3
2.
Tipos de Acionamentos ..................................................................................................... 4
2.1.
Motor CC sem Escovas (BLDC) ..................................................................................... 4
2.2.
Motor de Indução (MI)................................................................................................... 5
2.3.
Motor Síncrono de Ímã Permanente (MSIP) .................................................................... 6
3.
Inversores no Mercado Mundial e Brasileiro .................................................................... 7
3.1
Arens .......................................................................................................................... 9
3.2
Infineon ....................................................................................................................... 9
3.3
New Eagle ................................................................................................................... 9
3.4
Methode .................................................................................................................... 10
3.5
Powerex .................................................................................................................... 10
3.6
Semikron ................................................................................................................... 10
3.7
Siemens .................................................................................................................... 10
3.8
Weg .......................................................................................................................... 11
PARTE II – Desenvolvimento de Software para Inversores ......................................................... 12
4.
Introdução ....................................................................................................................... 12
5.
Validação Experimental do Modelo do Motor ................................................................ 12
6.
Técnicas de Modulação ................................................................................................... 15
6.1.
PWM Senoidal ........................................................................................................... 15
6.2.
PWM Vetorial ............................................................................................................. 17
7.
Controle em Malha Aberta (V/f) ..................................................................................... 19
7.1.
Teste em Bancada ..................................................................................................... 20
8.
Controle Vetorial ou Controle Orientado pelo Campo ................................................... 22
9.
Análise de um Circuito RL no Referencial Girante .......................................................... 26
9.1.
Transformada de Clarke.............................................................................................. 27
9.2.
Transformada de Park ................................................................................................ 28
10.
Projeto do Controle de Corrente em Malha Fechada ................................................. 30
11.
Simulação e Resultados Práticos ................................................................................. 35
12.
Estimador de Fluxo e Cálculo da Posição .................................................................... 39
12.1.
Modelo de tensão ....................................................................................................... 41
vi
12.2.
13.
Modelo de corrente..................................................................................................... 42
Controle da Velocidade sem Sensor ........................................................................... 44
13.1.
Simulação.................................................................................................................. 45
13.2.
Resultados Práticos .................................................................................................... 48
Conclusão e Trabalhos Futuros ................................................................................................... 52
Referências .................................................................................................................................. 53
vii
Introdução
Nos dias atuais, uma crescente preocupação com os aspectos ambientais tem
tornado realidade os veículos de passeio movidos a energia elétrica. Estes podem ser
classificados como híbridos, que utilizam motor a combustão e motor elétrico, ou
puramente elétricos, movidos a baterias ou pilhas combustível. Ambos utilizam os
dispositivos eletrônicos de potência como base de funcionamento para acionar e
controlar os motores elétricos ou para carregar as baterias e condicionar a energia para
alimentar os circuitos auxiliares.
Com o intuito de reduzir o custo, melhorar a eficiência e difundir o uso dos
carros elétricos, é necessário atentar para pontos importantes no seu projeto eletrônico
cujo principal elemento é comumente denominado "conversor" (estático) ou "inversor".
Este desenvolvimento requer análises das características mecânicas, térmicas e elétricas,
sendo uma área multidisciplinar e abrangente.
O projeto de qualquer conversor começa com a seleção da topologia a ser
utilizada, que deve estar de acordo com a aplicação. Eficiência, custo, confiabilidade,
tamanho, semicondutores e métodos de controle são alguns dos aspectos principais a
serem definidos para além da potência nominal da aplicação.
Em 2010, o departamento de energia dos Estados Unidos (DOE) publicou um
documento [1], através do seu programa de tecnologias para veículos, com o intuito de
guiar as pesquisas para novos avanços e desenvolvimento tecnológico a fim de, em
médio prazo, melhorar a eficiência de veículos a combustão e facilitar a transição para
veículos híbridos e elétricos. Esse documento cita que o grande foco da eletrônica de
potência é nos inversores, que são necessários para acionar os motores elétricos como
parte do sistema de tração. O design específico pode variar com a potência nominal do
sistema, número de fases, topologia e método de condicionamento do módulo e isto está
intimamente ligado ao tipo de motor que será acionado.
Em vista da importância dos inversores para o funcionamento dos veículos
elétricos e híbridos, cabe uma pesquisa um pouco mais detalhada sobre os produtos que
vêm sendo oferecidos no mercado e suas funcionalidades.
Neste trabalho é apresentada uma breve revisão dos aspectos topológicos de um
inversor utilizado em tração elétrica com foco nos veículos automotivos de passeio. São
abordados os principais tipos de acionamentos, um cenário do mercado mundial e
1
brasileiro dos inversores para este tipo de aplicação e as ferramentas de processamento
utilizadas para programar os dispositivos em suas especialidades.
A partir desse apanhado de informações são mostrados os conceitos envolvidos e
as etapas de desenvolvimento do software de um sistema para acionar e controlar um
motor de indução por meio de um inversor, podendo ser aplicado em propulsão de
veículos elétricos. O sistema desenvolvido é validado por simulações e experimentos
realizados em bancada num protótipo de potência reduzida (da ordem de 100 W).
Objetivos
O objetivo principal deste trabalho é o desenvolvimento do software para
controlar um motor de corrente alternada em operação com velocidade variável, que é o
sistema básico usado para a propulsão de um veículo elétrico.
Para implantar na prática o software desenvolvido, é empregado um controlador
baseado no processador TMS320F28335 (Delfino) da Texas Instruments. As
especificações desse controlador permitem integrá-lo a conversores de diferentes
fabricantes, em diversos níveis de potência.
Para analisar a viabilidade técnica/econômica de aplicações desse tipo, foi
estabelecido como um objetivo intermediário deste projeto avaliar as opções de
inversores veiculares existentes no mercado. Os resultados dessa avaliação servem de
parâmetros para seleção dos inversores em futuras aplicações reais, integrados ao
software de controle desenvolvido neste projeto.
No que se refere mais estritamente ao desenvolvimento do software de controle,
são estipulados os seguintes objetivos específicos: estudar os conceitos de técnicas de
modulação, controle escalar e controle vetorial de corrente e ainda o controle de
velocidade sem sensor a serem aplicados a um motor de indução.
Com o auxílio de programas de simulação e programação gráfica os conceitos
serão testados em bancada com um inversor adaptado para a aplicação proposta e um
motor de indução de baixa potência.
2
PARTE I – Revisão sobre Inversores para Tração Elétrica
1. Visão Geral
Os inversores utilizados em sistemas de propulsão elétrica são os dispositivos
eletrônicos responsáveis pelo controle do fluxo de energia que se dá, no geral, da fonte
em corrente contínua para os motores alimentados em corrente alternada. O fluxo no
sentido inverso, denominado frenagem regenerativa, onde a energia dissipada na
frenagem é armazenada nas baterias, também é possível em algumas topologias de
inversores.
O acionamento e controle de velocidade do motor elétrico são feitos mediante o
controle do inversor e nos veículos elétricos eles são o único sistema de controle da
propulsão. Nos veículos híbridos, se faz necessário outro sistema responsável por
acionar o sistema de propulsão a combustão.
As condições de operação de inversores para tração elétrica são definidas pela
velocidade e torque requeridos pelo motor que são altamente dependentes da aplicação.
Em veículo de passeio o motor opera em uma alta gama de velocidade e com alto
torque, assim, a frequência fundamental e a corrente variam significativamente [2].
A topologia mais tradicional de inversor para acionar motores em corrente
alternada é a VSI (voltage source inverter), que é a topologia em ponte trifásica
controlada e alimentada por uma fonte de tensão [3]. Com o VSI é possível fazer a
modulação da tensão em amplitude e em frequência, fatores necessários para o controle
da velocidade e operação do motor numa região em que não ocorra saturação do circuito
magnético. O inversor também deve ser capaz de suprir a corrente necessária para
produzir o torque mecânico que, para aplicação em propulsão, varia constantemente.
Os dispositivos semicondutores utilizados nos VSIs devem possuir capacidade
de controle de condução e bloqueio. Os IGBTs são utilizados em aplicações de mais alta
potência, podendo atingir a faixa de dezenas de megawatt, porém em baixa frequência
de chaveamento, operando em até 20kHz. Para aplicações em potência mais baixa, até
cerca de 200kW, os MOSFETs são recomendados podendo atingir uma frequência de
chaveamento na ordem de 100kHz. Existem outras tecnologias em estudo como os
inversores utilizando SiC (Carbeto de Silício) que ainda não estão difundidas no
mercado.
3
Outro aspecto que deve ser levado em consideração é a dinâmica térmica do
inversor que é influenciada pelas perdas por comutação das chaves. Como o ambiente
em que o inversor é alocado deve ser fechado, faz-se necessário um eficiente sistema de
refrigeração, caso contrário a temperatura do semicondutor pode ser tal que ultrapasse
um valor máximo, suportável pelo material, inutilizando-o.
A alta densidade de potência destes dispositivos também é um fator desejável
para sua aplicação em veículos elétricos devido à limitação do espaço físico a ser
ocupado por ele e ao peso acrescido.
A robustez mecânica é fator crucial na aplicação em veículos devido à vibração.
Assim, tanto o conversor como os dispositivos auxiliares do drive de comando devem
ser devidamente acondicionados.
2. Tipos de Acionamentos
Atualmente, os tipos mais comuns de motores utilizados nos veículos elétricos
são [4] os de ímã permanente, podendo ser síncrono (PMSM – Permanent Magnet
Synchronous Machine) ou de corrente contínua sem escovas (BLDC – Brushless DC).
Porém, com o encarecimento do material de terras raras utilizado nos motores de ímãs,
como NeFeB e SmCo [5], há um crescente interesse nos motores de indução (IM –
Induction Motor) para estas aplicações, devido a sua alta eficiência e confiabilidade.
Nesta seção é feita uma breve explanação sobre estes tipos de máquinas e suas formas
de controle.
2.1. Motor CC sem Escovas (BLDC1)
A diferença entre o motor BLDC e o motor CC convencional está na sua
estrutura mecânica. O BLDC possui os enrolamentos de armadura no estator,
geralmente trifásico como uma máquina de corrente alternada, e ímãs permanentes no
rotor em substituição ao enrolamento de campo. Assim não se faz necessária a
utilização das escovas e comutadores, que são a grande desvantagem das máquinas de
corrente contínua.
A utilização de ímãs de alta densidade de fluxo magnético, feitos de materiais
raros como NdFeB e SmCo, diminuem significativamente o peso e o volume deste tipo
de máquina, resultando em alta densidade de torque e potência. Sua eficiência também é
1
A sigla BLDC, apesar de ser uma abreviatura para o termo em inglês referente a motor CC sem escovas,
está amplamente difundida e será usada neste texto em substituição a sigla referente ao mesmo termo
em português.
4
maior que a das máquinas CC convencionais, pois não há perdas referentes aos
enrolamentos do rotor.
Os enrolamentos do BLDC são alimentados com tensão contínua, e o controle é
efetuado de maneira análoga ao de um motor CC, por isso a denominação de máquina
CC. Porém, essa alimentação varia entre os enrolamentos, sendo positiva ou negativa
em uma sequência pré-determinada num processo chamado comutação. A estrutura do
estator de polos salientes é projetada para produzir uma tensão induzida trapezoidal, o
que na prática é dificilmente alcançado resultando em uma onda quase senoidal. Assim,
as técnicas de controle utilizadas nas máquinas de corrente alternada podem ser
aplicadas a este tipo de motor.
No motor BLDC, o fluxo do estator é sempre posicionado adiante do fluxo do
rotor, pela ação de comutação. Desta forma, é necessário medir a posição do rotor, para
saber qual deve ser o próximo enrolamento a ser alimentado no estator. Essa medição da
posição rotórica, que pode ser feita utilizando sensores do tipo hall, aumenta o custo e
diminui a confiabilidade dos BLDCs.
Algumas técnicas de detecção da posição do rotor sem sensores estão sendo
amplamente estudadas. A mais comumente citada estima a posição do rotor através da
forma de onda da reação da armadura. Porém, quando operando em baixas velocidades
ou parado, a força eletromotriz é baixa demais ou nula e o processo se torna impreciso.
Assim, as formas de se acionar o motor BLDC podem ser diversas dependendo
das características estruturais do sistema como, por exemplo, possuir ou não sensores ou
mesmo o tipo de microprocessador utilizado. A técnica mais utilizada se dá pela
regulação de corrente com referência constante e comutação em blocos, produzindo
pulsos de corrente retangulares nas fases. Esta aplicação não é escopo do presente
trabalho.
2.2. Motor de Indução (MI)
O motor de indução é o tipo de motor mais utilizado atualmente em aplicações
industriais e tem sido cogitado para a propulsão de veículos elétricos e híbridos devido a
sua confiabilidade, robustez e baixo custo em relação aos motores de ímã permanente
[6].
Uma das maiores vantagens do MI é a baixa ondulação no torque, que resulta em
uma operação suave. Para tanto, ele deve ser acionado com tensão e corrente senoidais.
Os enrolamentos do estator são alocados em ranhuras com distribuição senoidal,
5
fazendo com que o fluxo no entreferro também seja senoidal e é este quem induz o
fluxo do rotor.
O rotor mais utilizado nestas máquinas é do tipo “gaiola de esquilo”, que
consiste em barras de cobre ou alumínio curto-circuitadas. A variação do fluxo induzido
no rotor é que produz uma tensão induzida e consequentemente uma corrente que flui
neste rotor. Em suma, a corrente que flui pelo estator induz uma corrente no rotor, de
forma análoga a um transformador e é a interação entre estes fluxos que produz o torque
da máquina.
Em aplicações de alta potência, os motores de indução podem alcançar uma
eficiência de cerca de 97% a 98%. Porém, com carga leve, devido à corrente requerida
para magnetizar o rotor, que consiste em uma parcela alta da corrente do estator, há uma
redução na eficiência desta máquina, além da operação com baixo fator de potência.
Para aplicações de velocidade variável o motor de indução pode ser controlado
variando a tensão e a frequência da forma de onda aplicada aos terminais do motor,
sendo este método de controle em malha aberta conhecido como método escalar. Ou
ainda pode-se usar controle vetorial, ou orientado por campo, em uma malha fechada
para controle de corrente e consequentemente do torque.
2.3. Motor Síncrono de Ímã Permanente (MSIP)
O motor síncrono de ímã permanente pode ser pensado como uma “mistura”
entre o motor de indução e o BLDC. A estrutura do seu estator é construída, como no
motor de indução, para produzir um fluxo senoidal no entreferro e a estrutura do rotor
não possui enrolamentos, mas sim um material magnético de alta energia como no
BLDC.
Quanto a forma construtiva, os imãs podem ser alocados no rotor do MSIP tanto
na superfície quanto no seu interior [7]. A posição em que os ímãs são alocados no rotor
destas máquinas produz efeitos diferentes como ocorre em uma máquina síncrona com o
rotor bobinado de polo liso ou saliente.
Este tipo de motor não apresenta um bom desempenho com o controle V/f, pois
em sua construção não há enrolamento de amortecimento que auxilie nas variações
transitórias. Assim, a melhor forma de controlar os MSIPs é utilizando o controle
vetorial.
Se comparados com os motores de indução, a oscilação de torque também é
baixa, porém o MSIP possui maior densidade de potência tendo um tamanho menor.
6
Isso se dá porque, no motor de indução, parte da corrente do estator é usada para induzir
a corrente no rotor e assim produzir o fluxo. Essa corrente adicional gera perdas
térmicas. Já o fluxo no rotor do MSIP é estabelecido pelos ímãs permanentes resultando
em uma corrente total menor que num MI para um mesmo torque e potência, reduzindo
também as perdas.
No chamado IPM, da sigla em inglês para ímã permanente interior, os ímãs são
alocados em ranhuras no interior do rotor acrescentando ao torque uma componente
devida à variação da relutância, semelhante à máquina de polos salientes. Com isso é
possível operar em situação de enfraquecimento de campo reduzindo parcialmente as
perdas no cobre. Assim, essa topologia é capaz de fornecer maior potência se
comparada àquela com os ímãs alocados na superfície do rotor de mesmo tamanho.
Estes “polos salientes” representam também uma vantagem na aplicação sem
sensores, principalmente em velocidades baixas. Mapeando a diferença na relutância é
possível determinar a posição do rotor. Assim, é comum a utilização do controle
vetorial sem sensor com este tipo de motor [8].
3. Inversores no Mercado Mundial e Brasileiro
A oferta de produtos no segmento de tração elétrica é bastante variada e é
preciso separar aqueles voltados para aplicações industriais dos de aplicação
automotiva.
Os inversores voltados para aplicações industriais no geral são de alta potência, e
projetados para ambientes exclusivos, com refrigeração apropriada. Além disso, as
cargas podem operar com velocidade constante ou variável, porém de características
diferentes de um veículo elétrico.
Os inversores aplicados aos veículos são exclusivamente de velocidade variável
e devem suportar vibrações e grandes variações de temperatura, logo, precisam de uma
preocupação maior com a robustez, acondicionamento e refrigeração. Estes podem ser
de alta potência (centenas de quilowatts até poucos megawatts), aplicados a trens,
metrôs, bondes, ônibus e trólebus, ou de média potência (dezenas de quilowatts),
aplicados aos veículos de passeio.
Em 2014 a General Motors, que já atuava no segmento dos veículos híbridos
com o Volt, lançou nos Estados Unidos o Spark EV, um veículo totalmente elétrico. O
7
veículo segue uma tendência da utilização de apenas um módulo onde são acoplados o
motor elétrico, inversor e driver.
O motor do Spark é de 85kW e sua bateria de íon-lítio opera em 360V a
21,4kWh. As informações e a figura 3.1 foram retiradas da fonte [9].
Desde 2010 os sistemas modulares já eram utilizados como no Nissan Leaf, que
hoje é o carro elétrico mais vendido no mundo e em 2014 começou a ser vendido no
Brasil. Seu módulo (motor, inversor e driver) é fabricado pela Remy Electric Motor e é
mostrado na figura 3.2 [10].
Figura 3.1: Chevrolet Spark EV. Fonte[9]
O D1g1tal Dr1ve produz
um torque de até
3200Nm para as rodas e
75kW de potência com o
motor Remy HVH 250,
dependendo da
engrenagem.
Figura 3.2: Módulo integrado da Remy Electric Motor. Fonte [10]
8
Esses módulos integrados específicos dos veículos que se encontram no mercado
no geral são desenvolvidos apenas para um fabricante e é difícil obter informações mais
detalhadas. Porém, diversas empresas oferecem produtos similares para aplicações de
tração elétrica automotiva.
Existem diferentes segmentos de inversores no mercado. Os chamados traction
inverters são dedicados à tração de veículos híbridos ou elétricos que demandam
operação descontínua e curtos períodos de sobrecarga. Estes são constituídos de
conversores eletrônicos de potência compostos por módulos IGBT, driver, elementos
passivos, sistema de resfriamento e controlador digital (DSP) com firmware instalado
para permitir configurações em alto nível.
O power stack apresenta a mesma configuração de hardware do anterior, porém
possui maior flexibilidade de desenvolvimento de software de controle. Em alguns
casos o DSP pode estar ausente e o hardware dispor de pinagem para aquisição de dados
e envio de sinais de controle, então é comum denominá-los IGBT assembly.
A seguir serão listados alguns dos principais fabricantes do segmento.
3.1 Arens
A americana Arens foi a primeira empresa a produzir inversores de tração para
uso em veículos elétricos comerciais. Sua linha de produtos, disponíveis no site da
empresa, varia entre 30 a 500kW de potência e 260 a 900V de tensão de entrada, com
aplicação em veículos elétricos desde carros de passeio a tratores [11].
3.2 Infineon
A Infineon apresenta produtos para aplicação em veículos híbridos ou puramente
elétricos numa gama de 30 a 100kW que devem ser acompanhados pelo driver de
potência EiceDRIVER que possui conector de interface com o controlador [12].
3.3 New Eagle
A New Eagle fornece assistência técnica e produtos para desenvolvimento de
sistemas de controle na indústria de veículos elétricos. É especializada em componentes
de controle de veículo e software de desenvolvimento para integração de equipamentos
eletrônicos, armazenamento de energia e sistema de propulsão. Para compreender a
diversidade de sua linha de produtos, citam-se alguns exemplos: EV Supervisor Control
Module – centraliza o sensoriamento e comando de todos os componentes do veículo. É
baseado no microcontrolador MotorHawk capaz de rodar simulações em Simulink;
9
usando uma biblioteca específica com funções de controle integradores e PIs, filtros e
outras bibliotecas chamadas New Eagle MotoHawk Libraries.
A rede de fornecedores da New Eagle inclui fabricantes de inversores de tração
que ela distribui: Phoenix, SEVCON, UQM e Rinehart. Alguns modelos devem possuir
protocolo de comunicação CAN para interagir com os produtos da New Eagle [13].
3.4 Methode
A Methode é uma empresa com forte presença no mercado de equipamentos
eletrônicos para veículos. Em Março de 2013 a Methode Electronics Power Solutions
Group anunciou o lançamento do SmartPower Stack, um inversor de alto desempenho
criado em parceria com National Instruments, Fuji Electric Corp. of America, SBE Inc.,
e AgileSwitch, LLC. Seus modelos variam de 50kW a 125kW [14].
3.5 Powerex
A Powerex é especializada em produzir power stacks para diversas aplicações. A
categoria de IGBT assemblies, chamada POW-R-PAK-GenII, contém o produto
PP300T120-ND. Este módulo é ideal para acionamento de motores, possuindo tensão
de entrada máxima de 1200V e corrente nominal de 300A. Como não possui DSP
integrado, apenas uma placa de interface com sinais de controle, não há possibilidade de
carregamento de software customizado [15].
3.6 Semikron
A família de inversores SKAI é especialmente desenvolvida para aplicações
automotivas. Os sistemas trifásicos são baseados em chaves IGBT ou Mosfet e
refrigerados a ar ou água. Sua arquitetura possui um DSP que carrega o software de
controle QUASAR produzido pela empresa Drivetek. Este recebe informações do
controlador central via barramento CAN e converte em velocidade ou torque. Sua
configuração depende do pacote de software Q-Control para sistema operacional
Windows. Com o Q-Control é possível alterar parâmetros, o tipo de controle
(velocidade ou torque), regular corrente e monitorar formas de onda. Estes dois
softwares são disponibilizados pela SKAItek [16].
3.7 Siemens
A Siemens possui aplicações em tração elétrica para diversos segmentos tanto
industriais como automotivos. Suas plataformas no geral são fechadas não sendo
10
possível a personalização do software. O inversor SIVETEC é dedicado a veículos de
passeio e tem capacidade de acionamento de motores com até 170kW. A empresa
oferece ainda o SIVETEC MSA 3300 que é um módulo integrado de motor inversor e
drive [17].
3.8 Weg
Algumas empresas brasileiras produzem veículos urbanos de passageiros com
sistemas de tração elétrica usando inversores da Weg. É o caso da Eletra que possui 45
ônibus híbridos e 300 trólebus atuando em São Paulo e da Tuttotrasporti no Rio Grande
do Sul. A Weg participa também como parceira no projeto Veículo Elétrico da Itaipu
Binacional, que objetiva desenvolver a tecnologia neste setor. Em 2013 foi lançado o
primeiro ônibus brasileiro totalmente elétrico que utiliza um inversor da Weg [18].
No catálogo de soluções para propulsão e tração elétrica disponível no site da
Weg encontra-se o modelo CFW11T com valor nominal de 599A de corrente e 650V de
tensão de entrada, refrigeração a água e frenagem regenerativa. Este inversor da família
CFW11 pode ser programado através dos softwares WLP e softPLC. Utilizando
linguagem ladder é possível ter acesso a parâmetros e sinais de E/S do inversor,
implementar funções lógicas e de matemática, contadores, comparadores, filtro passabaixa ou passa-alta, controlador PID, etc. Isto tudo é possível através da conexão USB
com um PC.
O modelo CVW300 também é utilizado para aplicações automotivas, porém
específico para motores de indução de baixa potência [19].
11
PARTE II – Desenvolvimento de Software para Inversores
4. Introdução
Nesta segunda parte é mostrado o desenvolvimento, passo a passo, do software
de controle para um motor de indução numa arquitetura aberta e flexível o bastante para
ser adaptada aos requisitos de diferentes aplicações veiculares. São apresentados
aspectos relevantes para a aplicação em questão referentes aos conceitos de modulação
por largura de pulso, técnica de controle escalar em malha aberta, controle da corrente
orientado pelo campo e, por fim, controle de velocidade sem sensor.
Todo o desenvolvimento apresentado foi realizado no software de simulação
PSIM, que é especializado na área de eletrônica de potência com foco em conversores e
possui biblioteca específica de integração com o microcontrolador F28335 da Texas
Instruments. Com a utilização desta ferramenta, foi possível testar o controle
desenvolvido em bancada.
Os testes práticos foram feitos com um protótipo adaptado para baixa potência
da empresa Recriar Tecnologias composto de um inversor trifásico a Mosfet’s, uma
placa de interface e comunicação e uma placa de controle. O conversor a Mosfet’s foi
feito escolhido para o desenvolvimento deste trabalho, pois os primeiros testes
realizados utilizando IGBT’s apresentaram altas perdas de condução, já que a aplicação
era de baixa tensão.
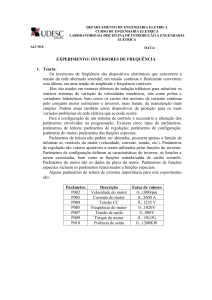
5. Validação Experimental do Modelo do Motor
A máquina utilizada nos experimentos foi um motor de indução trifásico de 2
polos com rotor gaiola de esquilo marca Equacional, modelo EA2/MSR/MS-56, classe
A. Trata-se de um motor especialmente fabricado para operação com tensão reduzida.
Os dados de placa são: conexão do estator em delta, 60W de potência, tensão nominal
de 30V por fase com frequência 60Hz, corrente nominal 2,8A e rotação 3500 - 3600
rpm.
O modelo em regime permanente de uma fase de um motor de indução [20] é
mostrado na figura 1.
12
Rs
Vs
jXs
Is
Vm
Rc
jXr
jXm
Rr/s
Figura 5.1: Modelo em regime permanente para uma fase de um motor de indução.
Seus parâmetros podem ser calculados mediante ensaios experimentais. Como
este motor já havia sido utilizado anteriormente em outros estudos, os ensaios realizados
para encontrar os parâmetros e os valores obtidos estão descritos em [21]. Os dados para
cada bobina2 do motor são mostrados na tabela 1.
Tabela 1: Parâmetros do motor
𝑅𝑠 (Ω)
2,00
𝐿𝑠 (𝑚𝐻)
74,24
𝑅𝑟 (Ω)
1,43
𝐿𝑟 (𝑚𝐻)
74,24
𝐿𝑚 (𝑚𝐻)
71,91
Para validar estes valores, foi feito um teste simples no motor sem carga
acoplada, aplicando uma tensão diretamente aos seus terminais e medindo tensão e
corrente com o auxílio de um analisador de qualidade. Os dados de tensão foram
utilizados em simulação com um bloco Look up Table para aplicar ao motor simulado a
mesma tensão da prática.
Os dados coletados de corrente também foram acrescentados à simulação do
mesmo modo, a fim de comparar os valores de correntes obtidos através da simulação
com os dados experimentais. O esquemático da simulação é mostrado na figura 2.
Figura 5.2: Simulação para validação dos dados do motor.
O resultado obtido para a fase A é mostrado na figura 3. As curvas das correntes
medidas experimentalmente e por simulação, curva vermelha e azul respectivamente,
2
Como a conexão dos enrolamentos do motor na prática é feita em ∆, os valores utilizados na simulação
são equivalentes a 1⁄3 dos valores apresentados na tabela 1.
13
mostram que o modelo é válido, já que ambas se sobrepõem em amplitude. Quando o
motor atinge o regime permanente, a corrente se torna indutiva em relação à tensão e a
diferença encontrada na defasagem da corrente medida e simulada se deve
provavelmente ao modelo da gaiola do motor modelado no software, que é
desconhecido e diferente do rotor do motor utilizado na prática.
Figura 5.3: Resultado da simulação para validação do modelo do motor.
Com este resultado pode-se também observar uma característica do motor de
indução acionado diretamente com tensão e frequência nominais, que é a alta corrente
de partida. Seu valor pode chegar a cerca de 7 vezes o valor da corrente nominal. No
caso mostrado, a corrente de partida é 5 vezes maior.
Diferentes métodos de acionamento permitem uma partida suave com baixa
tensão. Porém, se apenas a tensão diminuir, a máquina perde em capacidade de torque
podendo, em alguns casos com carga aplicada ao eixo, não conseguir partir.
Um veículo automotivo possui uma característica de alto torque na partida,
necessário para vencer a inércia, e esse processo ocorre diversas vezes durante um
trajeto urbano, por exemplo.
O uso dos inversores possibilitou um avanço neste sentido, permitindo aplicar
diversos métodos para acionar os motores de indução. O mais simples é o método
escalar, em malha aberta, que mantém constante a relação entre o módulo da tensão e a
frequência. Com isso pode-se acionar o motor com baixa tensão e frequência evitando a
alta corrente na partida e perda da capacidade de torque [22].
Para aplicação deste conceito, primeiramente será feita uma análise de como
produzir uma tensão alternada com valores do módulo e frequência desejados na saída
do VSI.
14
6. Técnicas de Modulação
O uso do inversor nos veículos elétricos se dá pela necessidade de condicionar a
energia das baterias para o motor, pois a bateria fornece corrente contínua e os motores
mais utilizados são alimentados em corrente alternada. Outro motivo que justifica o uso
dos inversores é a forma de realizar o controle da velocidade, que é função da
frequência e da amplitude da tensão aplicada aos terminais do motor.
O processo de comutação das chaves do inversor de maneira a produzir o efeito
desejado de tensão à sua saída é denominado modulação. Existem diferentes técnicas de
modulação e no geral estas variam de acordo com o objetivo que se quer alcançar e com
as variáveis indesejadas que se deseja minimizar, como perdas, distorção harmônica,
etc.
A técnica mais comum aplicada aos inversores do tipo VSI é a modulação por
largura de pulso, ou PWM (sigla para o termo em inglês Pulse Width Modulation). O
sinal que se quer modular é comparado a uma portadora triangular de frequência muito
mais alta que a frequência desejada na saída e com isso é possível determinar o tempo
em que cada chave deve permanecer conduzindo ou deve ser aberta.
A seguir serão detalhadas as técnicas de PWM senoidal e vetorial que são as
mais utilizadas para acionamento de máquinas.
6.1. PWM Senoidal
Na técnica de modulação por largura de pulso senoidal é possível modular a
amplitude e a frequência da saída usando uma senoide como referência, ou moduladora,
nos valores desejados. A figura 6.1 mostra a comparação entre os sinais da moduladora
e da portadora e o sinal de comando produzido pela comparação para acionar a chave
superior do inversor referente a fase modulada. O sinal da chave inferior é
complementar ao mostrado.
O índice de modulação da amplitude (𝑚𝑎 ) é definido pela razão entre a
amplitude da moduladora e da portadora. Para evitar a produção de componentes
harmônicas de baixa ordem, este índice deve variar em uma faixa que vai de zero a um.
𝑚𝑎 =
15
𝑉𝑚
.
𝑉𝑝
(6.1)
Figura 6.1: Modulação PWM senoidal3.
O índice de modulação de frequência (𝑚𝑓 ) é a razão entre a frequência de
chaveamento, que é a mesma da portadora, e a frequência da moduladora.
𝑚𝑓 =
𝑓𝑠
.
𝑓1
(6.2)
É preferível que esta relação seja um número inteiro, para evitar o aparecimento
de subharmônicos, e ímpar, para que a forma de onda de saída possua simetria de meia
onda, anulando os harmônicos pares [3].
Pela análise de Fourier, a onda produzida por fase na saída do inversor, seguindo
as indicações acima, é da forma:
𝑚𝑎 𝑉𝑐𝑐
sin(𝜔𝑡 + 𝜑) + ℎ𝑎𝑟𝑚ô𝑛𝑖𝑐𝑜𝑠 𝑚ú𝑙𝑡𝑖𝑝𝑙𝑜𝑠 𝑑𝑒 𝑓𝑠 ± 1.
2
Como a amplitude da componente fundamental do sinal gerado é função do
𝑣𝑜 =
índice de modulação, que varia entre zero e um, e da tensão de alimentação do VSI, a
amplitude máxima da tensão de saída será a metade da tensão no lado CC, não sendo
possível a operação do VSI como elevador de tensão. Para tanto, utilizam-se recursos
como o uso de um transformador do lado CA ou o uso de um conversor CC/CC tipo
Boost para controlar o lado CC
Para um melhor aproveitamento da fonte de energia do lado CC, é possível
operar com o índice de modulação acima de 1, numa operação denominada
sobremodulação. Esse recurso permite aumentar a amplitude da componente
fundamental em até 15%, porém introduz harmônicos de baixa ordem porque provoca
irregularidades na comutação [23]. Para aumentar a componente fundamental sem
3
Esta figura foi produzida por meio de simulação utilizando o software PSIM.
16
prejudicar a comutação existem diversas técnicas, como acrescentar uma parcela de
terceiro harmônico na referência. Outra maneira de se conseguir este efeito é utilizar o
PWM vetorial, que será detalhado na seção seguinte.
6.2. PWM Vetorial
O método vetorial considera a interação entre as fases e minimiza a produção de
harmônicos na carga [4]. Ele é baseado nas 8 combinações dos estados das chaves de
um inversor trifásico, sendo 6 delas ativas e 2 nulas, que produzem tensão zero. Os
vetores que representam estas possibilidades são espacialmente distribuídos no plano
𝛼𝛽 conforme a figura 6.2.
β
b
(0,1,0)
(1,1,0)
II
III
(0,1,1)
(0,0,0)
I
(1,1,1)
(1,0,0)
a
IV
α
VI
V
(0,0,1)
(1,0,1)
c
Figura 6.2: Distribuição espacial dos vetores de estado.
A rotação no plano é possível alterando o estado de apenas uma das chaves do
inversor por vez, o que diminui as perdas por comutação. Porém, o nível harmônico
neste caso é alto, pois estão definidos apenas locais discretos neste plano [24].
O acionamento de um motor com tensão trifásica senoidal e equilibrada produz
uma trajetória no plano 𝛼𝛽 que é uma circunferência (conceito de campo girante). Para
conseguir esta forma contínua é necessário alcançar estados nos setores entre os vetores
mostrados na figura 6.2. Para isto, utilizam-se os vetores nulos e comutam-se as chaves
em alta frequência produzindo um vetor resultante que na média é o desejado.
A figura 6.3 mostra a decomposição do vetor resultante em termos dos vetores
de estado que delimitam o setor no qual ele se encontra.
17
Vi+1
I
Vref
Vi
Figura 6.3: Projeção do vetor de referência nos eixos do setor I.
O vetor resultante, ou referência, é a soma das parcelas de cada uma das
projeções nos vetores adjacentes do setor conforme a equação:
𝑉𝑟𝑒𝑓 =
𝑡𝑖
𝑡𝑖+1
𝑉𝑖 +
𝑉 ,
𝑇𝑠
𝑇𝑠 𝑖+1
(6.4)
onde Ts é o período de chaveamento e é definido pela soma dos tempos de aplicação de
cada vetor:
(6.5)
𝑇𝑠 = 𝑡𝑖 + 𝑡𝑖+1 + 𝑡0 .
Assim, para cada setor é definida uma ordem de variação dos estados das chaves
que otimiza o processo de comutação. Calculando então para cada setor o padrão da
comutação por chave, é possível chegar à forma de onda do sinal de referência
(moduladora) vetorial em cada uma das fases do inversor. A figura 6.4 mostra essa
forma de onda e a tensão produzida por ela na saída. Pode-se ver ainda a fundamental
referente a esta forma de onda e como sua amplitude é superior à unidade.
4
Figura 6.4: Forma de onda por fase no SV-PWM .
4
Esta figura foi produzida por meio de simulação utilizando o software PSIM.
18
A tensão de linha vista pela máquina é formada pela diferença entre as fases,
cujas referências de modulação possuem a forma de onda mostrada na figura 6.4,
defasadas de 120º entre si. Essa onda moduladora resultante do PWM vetorial, subtraída
de sua respectiva componente fundamental, resulta num sinal que não apresenta
defasagem em relação às outras fases do sistema. Assim, esta componente é anulada na
composição das tensões fase-fase e pode-se dizer então que estas parcelas ditas
harmônicas de sequência zero podem ser aplicadas às tensões de fase sem que se altere
a tensão de linha.
Com esta nova forma de onda em substituição à onda senoidal vista no método
anterior, é possível aplicar um índice de modulação até 15% maior e com isso ter um
melhor aproveitamento da fonte de alimentação. O conteúdo harmônico de tensão e
corrente na saída do inversor para 𝑚𝑎 > 1 também é menor utilizando esse método, e
com isso é possível diminuir a pulsação no torque da máquina [23].
Conhecidos então os métodos mais comuns utilizados para produzir uma tensão
alternada à saída dos inversores, pode-se utilizar diversos métodos de controle para
determinar essa tensão e acionar o motor. Neste trabalho é aplicado primeiramente o
método mais simples para controle de inversores utilizado na indústria em motores de
indução: o método em malha aberta com variação proporcional de tensão e frequência
(V/f), que será descrito na seção seguinte.
7. Controle em Malha Aberta (V/f)
Os motores de indução são amplamente utilizados em aplicações industriais com
velocidade constante ou variável. O controle mais simples e de maior aplicação na
indústria é o controle em malha aberta V/f, que é baseado em manter constante a relação
entre a tensão e a frequência de alimentação da máquina.
A variação da velocidade do motor está diretamente ligada à variação da
frequência de alimentação, porém é necessário manter essa relação constante para que o
fluxo no estator se mantenha constante e não haja perda de capacidade de torque [22].
A figura 7.1 mostra um diagrama com o esquema do controle em malha aberta.
Não há realimentação de nenhuma variável. O escorregamento da máquina é pequeno o
suficiente para ser desconsiderado neste tipo de aplicação [4].
19
~~
Vdc
Comando
Controle
PWM
Figura 7.1: Diagrama de controle em malha aberta.
O controlador é programado para, dado o comando de partida, gerar uma
referência de tensão que será modulada, utilizando a técnica de PWM senoidal, e
aplicada aos terminais do motor. Como a corrente de partida de um motor de indução
pode chegar a 7 vezes o seu valor nominal5, é importante limitar esta corrente com uma
partida suave.
Na prática, para proceder uma partida suave, varia-se a referência de tensãoem
rampa, mantendo a relação entre amplitude e frequência, com valores pré-definidos até
alcançar a frequência nominal. O valor final da tensão CA depende da tensão CC, como
foi visto na seção anterior.
7.1. Teste em Bancada
Para testar a partida suave feita com o controle em malha aberta foi utilizado um
inversor da empresa Recriar Tecnologias e o motor didático detalhado na seção 5. A
figura 7.2 mostra os equipamentos montados em bancada para teste.
5
Quando a partida é feita diretamente com tensão e frequência nominais.
20
Figura 7.2: Bancada de testes.
O código foi desenvolvido, testado no simulador e então gravado no DSP que
controla o inversor. Um filtro RC foi acoplado à saída do inversor para mostrar a forma
de onda da tensão produzida e aplicada aos terminais do motor. Esta tensão é mostrada
na figura 7.3.
Figura 7.3: Tensão aplicada aos terminais do motor.
É possível notar a sua variação de amplitude e frequência em rampa, garantindo
uma partida suave ao motor.
A análise da corrente em uma das fases do motor é mostrada na figura 7.4, onde
é possível notar que, mesmo com partida suave a amplitude da corrente atinge um valor
que é cerca do dobro da corrente em regime permanente. A escala do eixo vertical do
osciloscópio foi ajustada em 2A por divisão.
Figura 7.4: Corrente de partida medida em uma das fases do motor.
21
Com este teste, nota-se que é possível aplicar aos terminais de um motor de
indução uma tensão alternada com valores pré-definidos, a partir de uma fonte de tensão
contínua, utilizando um inversor e uma técnica de modulação adequada.
Este valor pré-definido da tensão (moduladora) pode ser determinado como
resultado de um controle em malha fechada de corrente. Assim, pode-se impor um
padrão de corrente ao motor variando a tensão em seus terminais. O acionamento de MI
com imposição de corrente de forma escalar não é usual, porém auxilia no entendimento
do conceito do controle vetorial que será mostrado na próxima seção.
8. Controle Vetorial ou Controle Orientado pelo Campo
Na seção anterior foi mostrado que é possível controlar a velocidade sem perda
da capacidade de torque se a relação entre a tensão e a frequência de alimentação se
mantiver fixa. O método escalar é de simples aplicação e eficaz considerando pequenos
valores de escorregamento em um motor de indução, que é característico da operação
em regime permanente. Porém, em situações de aceleração e frenagem em que o
escorregamento aumenta, pode ocorrer perda de sincronismo, já que a resposta dinâmica
da parte mecânica da máquina pode ser mais lenta que a variação de frequência do
inversor.
Para aplicações em veículos de transporte coletivo de tração elétrica ou não,
deve-se atentar ainda para o desconforto causado aos usuários no momento da partida
ou parada, o chamado jerk ou solavanco. Os valores aceitáveis para a variação da
aceleração são em torno de 1,1 m⁄s3 a 1,5 m⁄s3 [25] e, como esta é uma característica
de regime transitório, o modelo em regime permanente não é capaz de prever
corretamente suas variações.
Se o sistema de acionamento controlar corretamente o comportamento elétrico
transitório do motor, a perda de sincronismo pode ser evitada sendo possível também
controlar os solavancos. Contudo, faz-se necessário trabalhar com equações complexas
não lineares, que levam em consideração o acoplamento natural que há entre as
variáveis de torque e fluxo de magnetização, que são funções da frequência e tensão ou
corrente de alimentação.
O controle vetorial é baseado na projeção do sistema trifásico em um sistema de
duas coordenadas ortogonais, o que simplifica o modelo elétrico não linear da máquina,
mas aumenta a complexidade de operação demandando maior capacidade de
processamento. Esta mudança de referencial estacionário para um referencial girante
22
pode ser aplicado às máquinas de corrente alternada síncronas ou assíncronas, mantendo
a velocidade de rotação do eixo de coordenadas igual à velocidade angular do campo
girante da máquina. Como esta mudança é apenas uma projeção de vetores temporais,
as quantidades elétricas instantâneas se mantêm e assim o controle se torna eficiente
também para o regime transitório.
Com essa mudança de variáveis, o modelo da máquina de corrente alternada se
aproxima do modelo da máquina de corrente contínua com excitação independente, em
que o torque é função do fluxo de campo e da corrente da armadura [4], como mostra a
equação:
(8.1)
𝑚 = 𝐾𝜓𝑓 𝐼𝑎 .
Na máquina de corrente contínua os campos gerados pelos enrolamentos de
campo e de armadura são idealmente perpendiculares devido à ação do comutador e por
não haver acoplamento entre eles pode-se controlar o fluxo de campo e a corrente de
armadura de forma independente. Isto resulta em uma relação linear entre o torque e a
corrente de armadura para um valor fixo da corrente de campo.
Nas máquinas de corrente alternada trifásicas, o vetor espacial que representa a
corrente do estator é definido como a soma vetorial das correntes instantâneas nos
enrolamentos da máquina, que são defasadas mecanicamente de 120º. Para simplificar a
notação, os vetores são representados na forma de números complexos, como escrito
em:
𝒊𝒔 = 𝑖𝑎 + 𝑎𝑖𝑏 + 𝑎2 𝑖𝑐 ,
(8.2)
2
onde 𝑖𝑎 , 𝑖𝑏 e 𝑖𝑐 são as correntes instantâneas por fase e 𝑎 = 𝑒 𝑗3𝜋 é o operador espacial.
Este vetor 𝒊𝒔 pode ser representado pelas suas projeções no referencial dq
conforme mostra a figura 8.1.
q
b
Is
Iq
Id
δ
ω
d
a
c
Figura 8.1:: Projeção da corrente Is no referencial girante dq.
23
A relação matemática que descreve esta transformação, denominada
Transformada de Park, é dependente da posição angular, como mostra a equação:
2𝜋
2𝜋
cos(−𝛿)
cos
(−𝛿
+
)
cos
(−𝛿
−
) 𝑖𝑎
2
𝑖𝑑
3
3
√
[𝑖 ] =
[
] [𝑖 𝑏 ]
2𝜋
2𝜋
𝑞
3
sin(−𝛿) sin (−𝛿 + ) sin (−𝛿 − ) 𝑖𝑐
3
3
(8.3)
e o módulo do vetor corrente no estator pode ser escrito como:
𝑖𝑠 = √𝑖𝑑2 + 𝑖𝑞2 .
(8.4)
Uma simplificação do modelo em regime permanente de uma máquina de
indução ideal no referencial girante dq, desenvolvido por G. Kron em 1942 [26], pode
ser visto na figura 8.2. A corrente 𝑖𝑑 flui pela indutância de magnetização 𝐿𝑚 e a
corrente 𝑖𝑞 flui pelo rotor. Por simplicidade a dispersão do fluxo no rotor é desprezada,
para que este seja igual ao fluxo de magnetização (𝜓𝑟 = 𝜓𝑚 ).
Rs
Vs
Ls
Vm
iq
Is
id
Lm
Rr/s
Figura 8.2: Modelo elétrico da máquina de indução no referencial girante.
Se o eixo direto 𝑑 estiver alinhado ao fluxo de magnetização a corrente 𝑖𝑑 será
responsável pelo fluxo de potência reativa e a corrente 𝑖𝑞 , do eixo em quadratura 𝑞, será
aquela que entrega potência ativa. Desta forma, é possível controlar o fluxo e o torque
de maneira desacoplada dando à máquina de indução um comportamento similar ao de
uma máquina CC. O diagrama fasorial referente ao circuito é mostrado na figura 8.3.
Vs
jXs Is
Iq
Id
Vm Rs I
s
q
Is
ψr
d
Figura 8.3: Diagrama fasorial do modelo dinâmico.
24
ωr
A expressão do torque no modelo da máquina de corrente contínua neste caso
pode ser adaptada à máquina de corrente alternada, conforme a equação:
(8.5)
𝑚 ∝ 𝜓𝑟 𝑖𝑞 = 𝐾𝑖𝑑 𝑖𝑞 .
Mantendo fixo o fluxo no rotor (𝜓𝑟 ), isto é, fazendo a corrente 𝑖𝑑 constante, a
relação entre o torque (𝑚) e a corrente 𝑖𝑞 é linear, tornando possível o controle do
torque pela variação da corrente no estator da máquina.
O diagrama da figura 4 mostra o esquema do controle vetorial de corrente
aplicado a um motor de indução. As correntes do estator são medidas, projetadas no
referencial 𝑑𝑞 e comparadas com seus respectivos sinais de referência. Os erros
resultantes dessas comparações são então tratados em controladores PI para produzir as
tensões de referência. Estes sinais gerados retornam ao referencial abc para produzir,
por modulação PWM, os comandos para o inversor que aciona o motor.
Vdc
Id*
+
PI
Vd*
Id
dq
abc
Iq*
+
Iq
PI
PWM
ia
δ
Vq*
~~
ib
ic
dq
abc
Figura 8.4: Diagrama do Controle Vetorial de um Motor de Corrente Alternada.
A referência angular 𝛿 necessária à transformação de variáveis do eixo 𝑎𝑏𝑐 para
o eixo 𝑑𝑞 deve ser igual à posição angular do fluxo enlaçado pelo rotor, para que o
controle funcione corretamente. Essa medida de posição angular consiste na maior
dificuldade do controle vetorial. Para medir diretamente o fluxo, seria necessária a
instalação de sensores no motor, o que pode ser economicamente inviável ou impossível
de realizar porque o interior da máquina é inacessível.
Industrialmente, utiliza-se um método indireto para estimar a posição angular e
magnitude do campo girante baseado no modelo vetorial da máquina. Com o auxílio de
um encoder, mede-se a velocidade de rotação e, a partir das correntes do estator e da
constante de tempo elétrica do rotor, calcula-se a frequência angular de escorregamento.
25
Isso faz com que o método se torne muito sensível à variação dos parâmetros elétricos
da máquina.
Apresentado o método de controle vetorial e as dificuldades e limitações na
medida do fluxo para sua aplicação em uma máquina de indução, a implementação do
controle vetorial será feita primeiramente de forma estacionária, onde será considerado
apenas o circuito do estator da máquina e as referências das correntes i d e iq serão
impostas e não calculadas.
9. Análise de um Circuito RL no Referencial Girante
A figura 9.1 apresenta o equivalente monofásico de um circuito RL trifásico
equilibrado com a carga ligada em Y. A menos de termos referentes à conversão
eletromecânica, este circuito se assemelha ao dos enrolamentos do estator de uma
máquina e sua equação característica no referencial girante dq será deduzida para
aplicação posterior do controle vetorial.
R
v(t)
i(t)
L
Figura 9.1: Equivalente monofásico do circuito dos enrolamentos do estator.
No referencial abc, a equação característica deste circuito no domínio do tempo
é:
𝑣⃗𝑎𝑏𝑐 = 𝐿
onde 𝑣⃗𝑎𝑏𝑐
𝑑
𝑖⃗ + 𝑅𝑖⃗𝑎𝑏𝑐 ,
𝑑𝑡 𝑎𝑏𝑐
(9.1)
𝑣𝑎 (𝑡)
𝑖𝑎 (𝑡)
= [𝑣𝑏 (𝑡)] e 𝑖⃗𝑎𝑏𝑐 = [𝑖𝑏 (𝑡)] são os vetores de tensão e corrente trifásicas.
𝑣𝑐 (𝑡)
𝑖𝑐 (𝑡)
Considerando-se 𝑢̂𝑖 o vetor unitário na direção i, pode-se escrever:
𝑣⃗𝑎𝑏𝑐 = 𝑣𝑎 (𝑡)𝑢̂𝑎 + 𝑣𝑏 (𝑡)𝑢̂𝑏 + 𝑣𝑐 (𝑡)𝑢̂𝑐 .
(9.2)
Para um circuito equilibrado, os eixos das fases são defasados em 120𝑜 e a
equação anterior torna-se:
2𝜋
2𝜋
𝑣⃗𝑎𝑏𝑐 = 𝑣𝑎 (𝑡)1 + 𝑣𝑏 (𝑡)𝑒 𝑗 3 + 𝑣𝑐 (𝑡)𝑒 −𝑗 3 .
26
(9.3)
Como as componentes abc estão no mesmo plano, pode-se concluir que elas não
são linearmente independentes. Todo o desenvolvimento feito para a tensão pode ser
feito analogamente para a corrente.
9.1. Transformada de Clarke
O objetivo da transformada de Clarke é projetar os vetores tensão e corrente em
um referencial estacionário 𝛼𝛽 eliminando a dependência linear entre suas
componentes. A figura 9.2 mostra essa projeção. O eixo 𝛼 é coincidente com o eixo a e
o eixo 𝛽 está 90𝑜 em avanço em relação a 𝛼. Desta definição de eixos resulta que um
vetor girando no sentido positivo (anti-horário) produzirá uma componente beta
atrasada de 90 graus com relação à componente alfa, o que corresponde a uma
sequência de fases direta ou positiva. Raciocínio análogo aplica-se às componentes abc.
b
β
v(t)
α, a
c
Figura 9.2: Representação vetorial no referencial estacionário 𝜶𝜷.
O vetor 𝑣(𝑡) pode ser escrito no referencial estacionário como:
𝑣⃗𝛼𝛽 = [
𝑣𝛼 (𝑡)
],
𝑣𝛽 (𝑡)
ou ainda:
𝑣⃗𝛼𝛽 = 𝑣𝛼 (𝑡)𝑢̂𝛼 + 𝑣𝛽 (𝑡)𝑢̂𝛽 .
(9.4)
Considerando-se o eixo alfa como sendo o eixo real e o eixo beta o eixo
imaginário, pode-se representar na forma complexa:
𝑣⃗𝛼𝛽 = 𝑣𝛼 (𝑡) + 𝑗𝑣𝛽 (𝑡).
(9.5)
Desenvolvendo (9.3) em termos de seno e cosseno e comparando os termos com
(9.5), chega-se à relação:
2𝜋
2𝜋
𝑣𝛼 (𝑡) = 𝑣𝑎 (𝑡) + 𝑣𝑏 (𝑡) cos ( ) + 𝑣𝑐 (𝑡) cos (− )
3
3
{
2𝜋
2𝜋
𝑣𝛽 (𝑡) = 𝑣𝑏 (𝑡) sin ( ) + 𝑣𝑐 (𝑡) sin (− )
3
3
27
(9.6𝑎)
(9.6𝑏)
Pode-se acrescentar ainda a componente homopolar, que para um circuito com
alimentação senoidal e equilibrada é nula, porém esta parcela se faz necessária para as
operações matriciais:
𝑣0 (𝑡) = 𝑣𝑎 (𝑡) + 𝑣𝑏 (𝑡) + 𝑣𝑐 (𝑡).
(9.7)
Com isso, tem-se, na forma matricial:
1
1
1
2𝜋
2𝜋 𝑣 (𝑡)
𝑣0 (𝑡)
1 cos ( ) cos (− ) 𝑎
(𝑡)
[𝑣𝛼 ] =
3
3 [𝑣𝑏 (𝑡)].
2𝜋
2𝜋
𝑣𝛽 (𝑡)
𝑣𝑐 (𝑡)
0
sin
(
)
sin
(−
)
[
3
3 ]
(9.8)
Genericamente pode-se dizer que 𝑣⃗𝑎𝑏𝑐 = [𝐶]−1 𝑣⃗𝛼𝛽 e 𝑖⃗𝑎𝑏𝑐 = [𝐶]−1 𝑖⃗𝛼𝛽 onde [𝐶]
é a matriz de transformação.
Substituindo estas relações em (9.1), que é a equação característica do circuito,
tem-se:
[𝐶]−1 𝑣⃗𝛼𝛽 = 𝐿
𝑑
[𝐶]−1 𝑖⃗𝛼𝛽 + 𝑅[𝐶]−1 𝑖⃗𝛼𝛽 .
𝑑𝑡
(9.9)
Como a matriz [𝐶] e sua inversa são formadas apenas por elementos constantes,
pode-se evidenciar o termo constante da derivada e ainda multiplicar a equação por [𝐶].
Assim:
𝑣⃗𝛼𝛽 = 𝐿
𝑑
𝑖⃗ + 𝑅𝑖⃗𝛼𝛽 ,
𝑑𝑡 𝛼𝛽
(9.10)
que é a equação que rege o comportamento do circuito RL visto pelo referencial estático
𝛼𝛽.
9.2. Transformada de Park
Com a transformada de Park é possível projetar tensão e corrente em um
referencial girante (eixos dq) com uma velocidade angular definida 𝜔 partindo dos
eixos abc ou mesmo do referencial 𝛼𝛽, como é mostrado na figura 9.3.
q β
v(t)
d
ω
δ
α
Figura 9.3: Decomposição no referencial dinâmico dq.
28
A partir do referencial 𝛼𝛽, a relação será:
𝑣⃗𝑑𝑞 = 𝑣⃗𝛼𝛽 𝑒 −𝑗𝛿 = 𝑣⃗𝛼𝛽 (cos 𝛿 − 𝑗 sin 𝛿);
(9.11)
𝑣𝑑 (𝑡) + 𝑗𝑣𝑞 (𝑡) = (𝑣𝛼 (𝑡) + 𝑗𝑣𝛽 (𝑡)) (cos 𝛿 − 𝑗 sin 𝛿).
(9.12)
Desenvolvendo a equação e separando os termos reais e imaginários, tem-se:
{
𝑣𝑑 (𝑡) = 𝑣𝛼 (𝑡) cos 𝛿 + 𝑣𝛽 (𝑡) sin 𝛿
𝑣𝑞 (𝑡) = −𝑣𝛼 (𝑡) sin 𝛿 + 𝑣𝛽 (𝑡) cos 𝛿
(9.13𝑎)
(9.13𝑏)
sin 𝛿 𝑣𝛼 (𝑡)
][
].
cos 𝛿 𝑣𝛽 (𝑡)
(9.14)
ou na forma matricial
[
𝑣𝑑 (𝑡)
cos 𝛿
]=[
𝑣𝑞 (𝑡)
− sin 𝛿
Fazendo então 𝑣⃗𝛼𝛽 = [𝑃]−1 𝑣⃗𝑑𝑞 e 𝑖⃗𝛼𝛽 = [𝑃]−1 𝑖⃗𝑑𝑞 , onde [𝑃] é a matriz de
transformação, substituindo em (9.10):
[𝑃]−1 𝑣⃗𝑑𝑞 = 𝐿
𝑑
[𝑃]−1 𝑖⃗𝑑𝑞 + 𝑅[𝑃]−1 𝑖⃗𝑑𝑞 .
𝑑𝑡
(9.15)
Neste caso, [𝑃] não é constante no tempo, pois o eixo dq está girando com
velocidade angular 𝜔 =
𝑑𝛿
𝑑𝑡
≠ 0. Assim:
𝑣⃗𝑑𝑞 = [𝑃]𝐿
𝑑
[𝑃]−1 𝑖⃗𝑑𝑞 + 𝑅𝑖⃗𝑑𝑞 .
𝑑𝑡
(9.16)
Em notação complexa, [𝑃]−1 equivale a 𝑒 𝑗𝛿 , então:
𝑣⃗𝑑𝑞 = 𝑒 −𝑗𝛿 𝐿
𝑑 𝑗𝛿
𝑒 𝑖⃗𝑑𝑞 + 𝑅𝑖⃗𝑑𝑞 .
𝑑𝑡
(9.17)
Aplicando as propriedades das derivadas, teremos:
𝑑
𝑑
𝑖⃗𝑑𝑞 + 𝑗𝑒 𝑗𝛿 𝑖⃗𝑑𝑞 𝛿) + 𝑅𝑖⃗𝑑𝑞 ;
𝑑𝑡
𝑑𝑡
𝑑
𝑑𝛿
= 𝐿 𝑖⃗𝑑𝑞 + 𝑅𝑖⃗𝑑𝑞 + 𝑗𝐿
𝑖⃗ .
𝑑𝑡
𝑑𝑡 𝑑𝑞
𝑣⃗𝑑𝑞 = 𝑒 −𝑗𝛿 𝐿 (𝑒 𝑗𝛿
(9.18)
𝑣⃗𝑑𝑞
(9.19)
Desmembrando em parte real e imaginária, pode-se escrever:
𝑑
𝑑𝛿
𝑖𝑑 + 𝑅𝑖𝑑 − 𝐿
𝑖
𝑑𝑡
𝑑𝑡 𝑞
{
𝑑
𝑑𝛿
𝑣𝑞 = 𝐿 𝑖𝑞 + 𝑅𝑖𝑞 + 𝐿
𝑖
𝑑𝑡
𝑑𝑡 𝑑
𝑣𝑑 = 𝐿
(9.20𝑎)
(9.20𝑏)
O diagrama de blocos da figura 9.4 ilustra o sistema de equações em (9.20)
evidenciando a existência de um termo cruzado que é dependente da posição angular do
eixo dq. Analisando separadamente cada eixo (d ou q), esses termos podem ser
interpretados como perturbações vindas do outro eixo.
29
Vd +
Id
x
L
ω
x
Vq
+
Iq
+
Figura 9.4: Diagrama de blocos do circuito RL no referencial dq.
Desconsiderando harmônicos e ruídos, esses termos cruzados ficam constantes
em regime permanente. Usando controladores PI, essas perturbações constantes são
rejeitadas tornando-se relevantes apenas durante transitórios. Havendo necessidade,
essas perturbações transitórias podem ser atenuadas adicionando-se termos algébricos
com a mesma expressão que os acoplamentos cruzados, porém com sinais opostos, na
saída dos controladores.
De posse destas equações, inicia-se o projeto dos controladores que serão
utilizados para testar esse controle.
10.
Projeto do Controle de Corrente em Malha Fechada
Para projetar o controlador de corrente do sistema, pode-se considerar que as
perdas são irrelevantes, tornado o circuito que representa o estator da máquina apenas
indutivo. O esquema mostrado na figura 8.4 é aproximado pelo da figura 10.1, onde é
evidenciada a separação entre as partes de software e hardware que representam
controlador e planta.
Figura 10.1: Diagrama do controle vetorial aplicado à uma carga indutiva.
30
As variáveis do laço de controle devem ficar constantes em regime permanente,
a menos de pequenas oscilações que podem ser causadas por ruídos ou distorções
harmônicas. O acoplamento cruzado está sendo desconsiderado para simplificar o
projeto do controlador e para cada um dos eixos o diagrama de blocos é mostrado na
figura 10.2. É importante salientar que as transformações dos referenciais abc para dq,
assim como a modulação, são consideradas instantâneas não influenciando na dinâmica
do sistema.
I* +
PI
V*
V
-
I
Figura 10.2: Diagrama de blocos do controle.
A função de transferência em malha aberta do sistema da figura 10.2 será:
𝐺𝑚𝑎 (𝑠) = (𝐾𝑝 +
𝐾𝑖
1
)𝑉 .
𝑠
𝑠𝐿
(10.1)
A função de transferência em malha fechada pode então ser escrita como:
𝐺𝑚𝑎 (𝑠)
𝐺𝑚𝑓 (𝑠) =
=
1 + 𝐺𝑚𝑎 (𝑠)
𝐾𝑝 𝑉
𝐾𝑖 𝑉
𝐿 𝑠+ 𝐿
.
𝐾𝑝 𝑉
𝐾𝑖 𝑉
2
𝑠 + 𝐿 𝑠+ 𝐿
(10.2)
Este sistema possui um zero e será analisada a diferença entre projetar o circuito
como um sistema de segunda ordem sem zeros ou considerando o zero existente.
Primeiramente, desmembra-se a equação do ganho em duas, mantendo o denominador
comum. Assim (10.2) se torna:
𝐺𝑚𝑓 (𝑠) = 𝐺1 (𝑠) + 𝐺2 (𝑠) =
onde 𝑁1 (𝑠) =
𝐾𝑝 𝑉
𝐿
𝑠, 𝑁2 (𝑠) =
𝐾𝑖 𝑉
𝐿
e 𝐷(𝑠) = 𝑠 2 +
𝑁1 (𝑠) 𝑁2 (𝑠)
+
,
𝐷(𝑠)
𝐷(𝑠)
𝐾𝑝 𝑉
𝐿
𝑠+
𝐾𝑖 𝑉
𝐿
(10.3)
.
Um sistema de segunda ordem sem zeros é genericamente escrito como:
𝐺(𝑠) =
𝜔𝑛2
.
𝑠 2 + 2𝜁𝜔𝑛 𝑠 + 𝜔𝑛2
(10.4)
Considerando-se este sistema subamortecido (0 < 𝜁 < 1), as equações que
definem os parâmetros de desempenho são conhecidas [27]. Para calcular a constante de
amortecimento e a frequência natural basta definir o tempo de acomodação (ts) e o
percentual de ultrapassagem ou overshoot (PO%).
Para um overshoot menor ou igual a 5%, tem-se:
𝑃𝑂 = 𝑒
(−
𝜁𝜋
)
√1−𝜁 2
× 100% ≤ 5%,
31
(10.5)
que resulta em 𝜁 ≥ 0,69.
Definindo o tempo de acomodação em 2ms, faz-se:
𝑡𝑠 =
e assim, 𝜔𝑛 =
2000
𝜁
4
= 0,002𝑠,
𝜁𝜔𝑛
(10.6)
.
Comparando 𝐺2 (𝑠) a (10.4) chega-se às equações dos ganhos proporcional e
integral. Os valores de L e V são dados por um conjunto de indutores de 5mH e uma
fonte de alimentação do lado CC do inversor em 20V. Fazendo 𝜁 = 0,7 e substituindo
nas equações encontramos os valores:
𝐾𝑝 =
2𝜁𝜔𝑛 𝐿
= 1;
𝑉
(10.7)
𝜔𝑛2 𝐿
𝐾𝑖 =
= 2041.
𝑉
(10.8)
A equação geral de um sistema de segunda ordem com um zero é da seguinte
forma:
𝜔𝑛2
(𝑠 + 𝑎)
𝐺𝑧 (𝑠) = 2 𝑎
.
𝑠 + 2𝜁𝜔𝑛 𝑠 + 𝜔𝑛2
(10.9)
O efeito do zero na função de transferência pode ser reduzido fazendo com que
os polos sejam dominantes, isto é, afastando o zero dos polos [28]. Neste caso em que
se têm dois polos complexos conjugados faz-se 𝑎 ≫ 𝜁𝜔𝑛 . Para a função de
transferência calculada 𝐺𝑚𝑓 (𝑠) essa condição é dada por:
𝐾𝑝 𝑉
𝐾𝑖
≫
.
𝐾𝑝
2𝐿
Kp.s+Ki
V
(10.10)
1
Iq_teorico
s
L.s (10.7) e (10.8), obtém-se 𝑎 =
Com os valores das constantes
calculadas em
Referência1
PI
Saída
Planta
2041 e 𝜁𝜔𝑛 = 2000, o que não satisfaz a condição apresentada em (10.10) para que o
efeito do zero no sistema seja
desprezado. Sendo1 assim, os dois sistemas foram
kp.s+ki
V
Iq_cz
s
L.s
simulados utilizando a ferramenta
Simulink (figura
10.3) a fim de comparar as
diferentes respostas, mostrando a influência do zero na função de transferência.
ki*V/L
s2 +kp*V/L.s+ki*V/L
Y
Referência
kp*V/L.s+ki*V/L
s2 +kp*V/L.s+ki*V/L
Figura 10.3: Comparação dos sistemas no Simulink.
32
Yzero
A resposta ao degrau unitário mostrou que a inclusão do zero no sistema diminui
o tempo de subida, não influenciando no tempo de acomodação. Porém, o overshoot
ultrapassa 20%, quando o desejado era apenas 5%. Os gráficos são mostrados na figura
10.4.
1.4
1.2
Amplitude
1
0.8
0.6
0.4
0.2
Sem Zero
Com Zero
0
0
0.5
1
1.5
2
2.5
3
3.5
4
Tempo (s)
4.5
5
x 10
-3
Figura 10.4: Resposta ao degrau de um sistema de segunda ordem com e sem zero.
Para diminuir este efeito do alto overshoot, uma alternativa é considerar um
sistema sobreamortecido (𝜁 > 1). Neste tipo de sistema tem-se 2 polos reais em que um
deles está suficientemente afastado para tornar seu efeito desprezível. Isso faz com que
o sistema se comporte como um sistema de primeira ordem.
A equação do tempo de acomodação é a mesma do sistema subamortecido e, impondo
uma constante de amortecimento maior que 1, é possível calcular a oscilação natural do
sistema. Para o mesmo 𝑡𝑠 = 0,002𝑠, tem-se:
𝜔𝑛 =
2000
.
𝜁
(10.11)
Fazendo 𝜁 = 2 e aplicando estes valores em (10.7) e (10.8) para calcular as
constantes proporcional e integral, encontra-se:
𝐾𝑝 =
2𝜁𝜔𝑛 𝐿
= 1;
𝑉
(10.12)
𝐾𝑖 =
𝜔𝑛2 𝐿
= 250.
𝑉
(10.13)
Conhecendo a localização do pólo dominante em (𝜁 − √𝜁 2 − 1)𝜔𝑛 ≅ 268 e
𝐾
comparando com o zero do sistema 𝑎 = 𝐾 𝑖 = 250, nota-se que seu efeito novamente
𝑝
não pode ser desprezado.
33
A mesma simulação foi feita utilizando os novos valores dos ganhos e observase assim o efeito do zero no sistema sobreamortecido. Os gráficos são mostrados na
figura 10.5.
1.4
1.2
Amplitude
1
0.8
0.6
0.4
0.2
Sem Zero
Com Zero
0
0
0.005
0.01
0.015
0.02
0.025
0.03
Tempo (s)
Figura 10.5: Comparação dos sistemas com diferentes ganhos.
A figura 10.6 é uma comparação entre os sistemas sub e sobreamortecidos
levando em conta o efeito do zero do sistema. É possível notar que ambos possuem
mesmo tempo de subida e que o tempo de acomodação está dentro do estipulado para os
dois casos. Porém o sistema subamortecido extrapola o valor definido para o percentual
de ultrapassagem devido à influência do zero do sistema, enquanto no sobreamortecido
este percentual fica dentro do estabelecido inicialmente no projeto.
1.4
1.2
Amplitude
1
0.8
0.6
0.4
0.2
0
0
Sub-Amortecido
Sobre-Amortecido
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
Tempo (s)
Figura 10.6: Comparação de desempenho de um sistema sub e sobre amortecido.
Ajustados os ganhos do controlador, será feita uma simulação do sistema real e
não apenas de suas funções de transferência para, em seguida, gerar o código executável
34
a ser embarcado no controlador e testar experimentalmente o controle da corrente
aplicado a uma carga indutiva.
11.
Simulação e Resultados Práticos
Nesta etapa será utilizado o mesmo controlador projetado na seção anterior, para
os dois laços de corrente. A corrente do eixo direto é mantida fixa e varia-se a corrente
em quadratura. A figura 11.1 mostra a simulação do sistema teórico, utilizando sua
função de transferência, na ferramenta Simulink onde é aplicado como referência um
degrau com o valor inicial de 1A passando a 2A no instante 0,02s.
Kp.s+Ki
Referência
1
V
Iq_teorico
s
L.s
PI
Planta
Saída
Figura 11.1: Simulação utilizando a função de transferência do sistema.
A figura 11.2 mostra a corrente em quadratura que é resultante desse sistema.
Este resultado é uma reprodução do que deveria acontecer no sistema real. Os índices de
desempenho são aqueles estipulados na seção anterior.
2.5
Corrente (A)
2
1.5
1
0.5
0
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
Tempo (s)
Figura 11.2: Corrente em quadratura resultante da simulação teórica, para um degrau de referência em t=0,02s.
Usando então o software de simulação PSIM, tem-se uma réplica virtual do
sistema que será desenvolvido na prática incluindo a parte de hardware. A figura 11.3
mostra o esquemático desta simulação. A parte em vermelho representa o sistema de
potência que inclui a fonte de alimentação o inversor e a carga indutiva com seus
respectivos sensores. A parte em verde é referente ao sistema de controle que é feito
através de um microprocessador. No bloco “controle” está o código com as
35
transformações de variáveis e os controladores implementados de forma digital assim
como os filtros e o sistema de proteção.
Figura 11.3: Esquemático da simulação no PSIM.
O simulador possui ainda blocos de configuração de hardware do
microprocessador utilizado, que é um DSP da família F28x do fabricante Texas
Instruments. Com isso é possível, além de simular o sistema, gerar o código que será
aplicado diretamente no controle através do DSP e ainda configurar comando e análise
de variáveis em tempo real.
A figura 11.4 mostra o resultado da simulação no software. O comando para
variar a corrente é dado no instante 0,04s. As curvas mostram a corrente que circula na
fase c da carga indutiva e a corrente em quadratura calculada com as correntes obtidas
no referencial abc e as devidas transformações. Vale ressaltar que o valor da referência
dá o valor de pico da corrente e que o sistema, para a frequência constante em 60Hz,
consegue se estabilizar em menos de um ciclo.
36
Figura 11.4: Corrente resultante em uma das fases e corrente em quadratura medida.
Na prática, o código gerado pelo PSIM é carregado em um microprocessador
que aciona o circuito de acionamento das chaves do inversor. A figura 11.5 mostra o
sistema montado em bancada. À direita da figura vemos a placa de controle com o
microprocessador e o sistema de aquisição de dados analógicos. Ao centro temos o
inversor com o módulo dos drivers acoplado. À esquerda temos a carga indutiva que foi
utilizada neste teste. Há ainda uma fonte de alimentação que não aparece na figura, os
sensores de corrente à saída do indutor e um osciloscópio para aquisição dos dados.
Figura 11.5: Teste em bancada com carga indutiva.
A figura 11.6 mostra a corrente em uma das fases da carga. O mesmo
procedimento da simulação é feito. A referência para a corrente em quadratura é
inicialmente 1A e então passa a 2A. É possível notar a variação no valor de pico da
corrente medida que é igual ao valor da referência.
37
Figura 11.6: Corrente medida em uma das fases da carga.
Usando o DSP Osciloscope, módulo do software PSIM que permite variar e
analisar variáveis em tempo real, foi medida a projeção da corrente no eixo q. Esta é
mostrada na figura 11.7.
Figura 11.7: Corrente Iq aquisitada em tempo real.
Para comparar os resultados, os dados obtidos de simulação e na prática foram
exportados para o Matlab e plotados sobrepostos. O gráfico resultante é mostrado na
figura 11.8.
2.5
Corrente (A)
2
1.5
1
0.5
Iq Teórico
Iq Simulado
Iq Prático
0
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
Tempo (s)
Figura 11.8: Comparativo entre as correntes em quadratura teórica, simulada e medida.
38
É possível notar que na prática o ruído não é desprezível. O número reduzido de
pontos obtidos também influencia nesta forma de onda, tornando-a mais distorcida. A
figura 11.9 é um zoom no momento da transição para mostrar o desempenho dinâmico
do sistema.
Nota-se que já na simulação é introduzido um pequeno atraso em relação à
teoria, pois, além de desconsiderarmos a dinâmica da operação do microprocessador
que é da ordem de microssegundos, o controlador foi digitalizado e aplicado em uma
simulação contínua. O erro nas simulação em comparação aos valore teóricos
encontrados é de 2,5% e 0,4% para o percentual de overshoot e o tempo de acomodação
respectivamente.
O sistema na prática, mesmo com o ruído inserido, possui erro no tempo de
acomodação em relação ao valor teórico de 0,7% e o erro no percentual de
ultrapassagem é de 2,8%.
2.2
2
Corrente (A)
1.8
1.6
1.4
1.2
1
0.018
Iq Teórico
Iq Simulado
Iq Prático
0.02
0.022
0.024
0.026
0.028
0.03
0.032
0.034
0.036
0.038
Tempo (s)
Figura 11.9: Comparativo entre correntes em quadratura.
Com os resultados obtidos, pode-se garantir o funcionamento do controle da
corrente em um circuito estático. Os próximos passos serão: apresentar uma forma de
obtenção do fluxo do rotor para um motor de indução e calcular, a partir dessa
informação, a direção correta da corrente id e a posição angular do referencial girante.
12.
Estimador de Fluxo e Cálculo da Posição
Uma das maiores dificuldades de se aplicar o controle vetorial a um motor de
indução se encontra em alinhar o eixo d do referencial girante com o fluxo do rotor,
devido à diferença inerente da velocidade entre o rotor e estator, o chamado
escorregamento.
39
É possível trabalhar com o alinhamento de id em relação ao fluxo do rotor, do
entreferro ou do estator. Porém, apenas o alinhamento com o fluxo do rotor possibilita
eliminar o acoplamento entre torque e fluxo e fazer a máquina de indução operar como
uma máquina de corrente contínua. Nos outros casos, seria necessário inserir no
controle algumas parcelas de compensação.
O diagrama da figura 12.1 mostra, nos referenciais estático (𝛼𝛽) e dinâmico
(dq), o alinhamento correto dos eixos e das correntes em relação ao fluxo do rotor.
ωe
q
iqs
ψβr
ψqr=0
β
ids
δ
ψαr
ψdr=ψr
d
α
Figura 12.1: Diagrama vetorial de alinhamento do fluxo.
Na prática a medida do fluxo do rotor dificilmente será feita de forma direta,
pois há dificuldade no acesso ao interior da máquina e os sensores para este tipo de
medida aumentam o custo do sistema. Assim, utilizam-se técnicas para estimar esse
fluxo através das variáveis medidas do estator.
As formas mais comuns de se estimar o fluxo do rotor da máquina são os
modelos de tensão e corrente que serão apresentados a seguir. Para ambos os modelos
será utilizado o circuito equivalente do motor de indução no referencial estático 𝛼𝛽,
desenvolvido por H. C. Stanley [29], que é mostrado na figura 12.2.
iαs
Rs
Vαs
iαr
Lls
Lm
ψ˙ αr
iβs
Rs
Vβs
+
ωrψβr
iβr
Lls
ψ˙ βs
Rr
-
ψ˙ αm
ψ˙ αs
Llr
Vm
Llr
Vm
ψ˙ βm
Rr
+
Lm
ψ˙ βr
-
ωrψαr
Figura 12.2: Circuito equivalente no referencial estático.
40
12.1.
Modelo de tensão
O modelo de tensão consiste em calcular o fluxo do rotor através da tensão e
corrente medidas nos terminais da máquina e seus parâmetros de dispersão,
magnetização e perdas no cobre do estator.
As correntes e tensões medidas são projetadas no referencial estacionário 𝛼𝛽.
Analisando o circuito da figura 12.2 pode-se perceber que a malha referente ao estator é
igual para os dois eixos e para o fluxo do rotor. Desta forma, as equações serão idênticas
em ambos os eixos e a escrita será limitada à utilização do índice 𝛼𝛽.
O fluxo no estator é diretamente calculado pela equação da malha do estator
𝜓𝛼𝛽,𝑠 = ∫(𝑣𝛼𝛽,𝑠 − 𝑅𝑠 𝑖𝛼𝛽,𝑠 )𝑑𝑡 .
(12.1)
O fluxo de magnetização é igual ao fluxo do estator, descontadas as quedas por
dispersão.
𝜓𝛼𝛽,𝑚 = 𝜓𝛼𝛽,𝑠 − 𝐿𝑙𝑠 𝑖𝛼𝛽,𝑠 .
(12.2)
Pela equação do circuito do rotor podemos escrever ainda:
𝜓𝛼𝛽,𝑟 = 𝐿𝑚 𝑖𝛼𝛽,𝑠 + 𝐿𝑟 𝑖𝛼𝛽,𝑟 ,
(12.3)
em que 𝐿𝑟 = 𝐿𝑚 − 𝐿𝑙𝑟 .
Porém, a corrente no rotor não é conhecida. Com algumas manipulações
matemáticas chega-se a:
𝜓𝛼𝛽,𝑟 =
𝐿𝑟
𝜓
− 𝐿𝑙𝑟 𝑖𝛼𝛽,𝑠 .
𝐿𝑚 𝛼𝛽,𝑚
(12.4)
Conhecendo então as projeções do fluxo do rotor, é possível encontrar, de
acordo com a figura 12.1, o módulo 𝜓𝑟 e a posição 𝛿 do vetor fluxo do rotor:
2 + 𝜓2 ;
𝜓𝑟 = √𝜓𝛼,𝑟
𝛽,𝑟
(12.5)
𝜓𝛽,𝑟
𝛿 = tan−1 (
).
𝜓𝛼,𝑟
(12.6)
A posição angular calculada será então utilizada como parâmetro nas
transformações para o referencial girante.
Este modelo de tensão é simples e pode ser facilmente implementado, porém não
atende bem a operações em baixa velocidade devido aos sinais de tensão que, nestes
casos, são baixos e podem resultar em erro nos cálculos de integração numérica.
41
Há problemas ainda por depender dos parâmetros da máquina que são variáveis,
principalmente a resistência que pode alterar o seu valor em até 50% dependendo da
temperatura da operação.
Como para a aplicação em veículos elétricos é necessário variar constantemente
a velocidade e em uma gama muito ampla, é necessário um método que permita a
operação em baixas velocidades. A seguir será apresentado o modelo de corrente.
12.2.
Modelo de corrente
O modelo da corrente é baseado na análise da malha do rotor no circuito da
figura 12.2. Para tanto se faz necessário medir a velocidade do rotor. Pela lei de
Kirchhoff das malhas:
𝑑
𝜓
+ 𝑅𝑟 𝑖𝛼𝛽,𝑟 ± 𝜔𝑟 𝜓𝛽𝛼,𝑟 = 0.
𝑑𝑡 𝛼𝛽,𝑟
(12.7)
Substituindo (12.3) em (12.7) e com algumas manipulações matemáticas pode-se
escrever:
𝑑
𝐿𝑚
1
𝜓𝛼𝛽,𝑟 =
𝑖𝛼𝛽,𝑠 ∓ 𝜔𝑟 𝜓𝛽𝛼,𝑟 − 𝜓𝛼𝛽,𝑟 ,
𝑑𝑡
𝜏𝑟
𝜏𝑟
(12.8)
𝐿
onde 𝜏𝑟 = 𝑅𝑟 é a constante de tempo do circuito do rotor.
𝑟
O diagrama de blocos da figura 12.3 representa o modelo de corrente de forma
mais clara e novamente utilizando as relações mostradas na figura 12.1 chega-se ao
módulo e posição do vetor fluxo.
iα,s
+
ψα,r
+
X
ωr
X
iβ,s
+
ψβ ,r
-
Figura 12.3: Diagrama de blocos do modelo de corrente.
42
Apesar de poder trabalhar com baixas velocidades utilizando este método, existe
aqui uma limitação que é a necessidade de conhecer a velocidade do rotor, através de
um encoder ou um estimador. O método de corrente apresenta ainda a mesma limitação
do método de tensão para a variação dos parâmetros da máquina.
Como o modelo de tensão apresenta bons resultados em alta velocidade e o de
corrente o complementa, permitindo operar em baixas velocidades, é plausível pensar
em um modelo híbrido para operação em uma faixa de velocidade mais ampla.
A biblioteca de software DMC da Texas Instruments [30], voltada
especificamente para controle de motor, inclui um módulo de estimador de fluxo que
utiliza os modelos de tensão e corrente, caracterizando um modelo híbrido.
O diagrama de blocos da figura 12.4 é uma visão geral da operação da macro do
estimador de fluxo da biblioteca TI DMC. Os resultados obtidos pelos dois modelos são
comparados e o erro resultante é utilizado como uma parcela de compensação para o
cálculo final que é feito pelo modelo de tensão.
vα,s vβ,s
Rs
iα,s
iβ,s
Estimador
Modelo de
Corrente
ψα,ri
ψβ ,ri
ψα,si
i
ψs (ψri , is)
ψβ ,s
i
-
+
Rs
-
+ +
PI
ψα,sv
ψrv (ψsv , is)
ψα,rv
δ
ψβ ,rv
+
ψβ ,sv
+
+
Estimador
Modelo de
Tensão
Tg-1
Figura 12.4: Modelo do estimador de fluxo da DMC TI.
A versão mais atual do simulador PSIM 9.3 possui uma biblioteca específica
com elementos de simulação que são traduções das funções da biblioteca DMC da
Texas. Com esta ferramenta é possível configurar e utilizar de forma simples os
recursos como o estimador de fluxo mostrado.
Calculado então o alinhamento correto do fluxo para realizar o controle vetorial
de forma eficaz, pode-se inserir a partir de então a malha de controle da velocidade
deste motor. O processo será descrito na próxima seção.
43
13.
Controle da Velocidade sem Sensor
A utilização de sensores de velocidade produz um aumento no custo e
diminuição na confiabilidade do sistema, além de ser necessário o acesso ao eixo do
rotor ou uma extensão deste. Apesar dos estimadores de velocidade serem dependentes
dos parâmetros variantes das máquinas e em alguns casos os cálculos serem complexos,
com o desenvolvimento dos microprocessadores é possível estimar a velocidade com
precisão [4].
Existem diferentes métodos para estimar a velocidade, nomeadamente: cálculo
do escorregamento, observador de Luenberger, filtro de Kalman estendido dentre
outros. O estimador utilizado neste trabalho, que está incluído na biblioteca DMC da TI,
será baseado na síntese direta das equações de estado (12.8).
Derivando a posição do fluxo do rotor (12.6) pode-se encontrar a sua velocidade
que é também chamada velocidade síncrona (𝜔𝑒 ), já que é a ela que se referenciam os
eixos d e q.
𝜔𝑒 =
𝜓𝛽,𝑟
𝑑
tan−1 (
).
𝑑𝑡
𝜓𝛼,𝑟
(13.1)
Com algumas manipulações matemáticas e a relação de (12.5) chega-se a:
𝜔𝑒 =
𝑑𝜓𝛽,𝑟
1
𝑑𝜓𝛼,𝑟
(𝜓𝛼,𝑟
− 𝜓𝛽,𝑟
).
2
𝜓𝑟
𝑑𝑡
𝑑𝑡
(13.2)
É importante lembrar que as operações de derivação podem amplificar
componentes de alta frequência causadas por ruídos ou quantizações. Por isso, é
necessário realizar filtragem passa-baixa no resultado ou nas parcelas derivativas desta
equação.
Substituindo as equações de estado (12.8) em (13.2), é possível encontrar a
velocidade do rotor em função dos parâmetros da máquina e de variáveis medidas e
estimadas anteriormente:
𝜔𝑟 = 𝜔𝑒 −
1 𝐿𝑚
(𝜓𝛼,𝑟 𝑖𝛽,𝑠 − 𝜓𝛽,𝑟 𝑖𝛼,𝑠 ).
𝜓𝑟2 𝜏𝑟
(13.3)
A segunda parcela da equação é conhecida como velocidade de escorregamento
da máquina, que é proporcional ao torque quando o fluxo do rotor é mantido constante.
𝑇𝑒 =
3 𝑝 𝐿𝑚
(𝜓𝛼,𝑟 𝑖𝛽,𝑠 − 𝜓𝛽,𝑟 𝑖𝛼,𝑠 ).
2 2 𝜏𝑟
44
(13.4)
Com o estimador de velocidade, aplica-se o controle em uma malha mais externa
e a partir do tratamento deste erro define-se a referência para a corrente em quadratura
que está associada ao torque no controle vetorial.
O diagrama de blocos da figura 13.1 mostra o controle vetorial completo com as
malhas de controle de corrente e velocidade e com os estimadores descritos.
Vcc
+
Id*
Id
ωr* +
PI
ωr
Iq* +
Iq
PI
Vd*
αβ
abc
dq
αβ
PI
~~
Vq*
δ
Estimador de
Fluxo e Posição
PWM
ia
ψα,r
ib
ψβ,r
iα,s
dq
αβ
iβ,s
αβ
abc
ic
Estimador de
Velocidade
Figura 13.1: Diagrama de blocos do controle orientado pelo fluxo do rotor.
13.1.
Simulação
As figuras 13.2, 3 e 4 mostram os esquemáticos da simulação do controle
vetorial sem sensor [31]. Na figura 13.2 encontra-se a representação do hardware na
etapa de potência com o inversor, o motor e os sensores de corrente. Um sensor de
velocidade foi adicionado apenas para comparação com o sinal obtido do estimador.
Figura 13.2: Simulação do Hardware.
A figura 13.3 mostra a interface do controle. Nela se encontram os blocos de
conversão dos sinais dos sensores analógicos para digitais, o modulador PWM e os
sinais de comando para iniciar o controle. Os sinais digitais dos sensores e sinais de
45
comando são entradas de um subcircuito que contém a técnica de controle em si. As
saídas deste mesmo bloco são as moduladoras do PWM.
Figura 13.3: Simulação da interface de condicionamento e controle.
A figura 13.4 mostra o conteúdo do subcircuito da figura 13.3. Nesta etapa são
utilizados os blocos da biblioteca DMC relatada anteriormente.
Figura 13.4: Subsistema de controle.
A malha mais interna mostra o controle da corrente como foi apresentado e
testado nas seções 8 e 11 respectivamente. As correntes medidas nas fases passam pelas
transformadas de Clarke e Park para serem projetadas nos eixos 𝛼𝛽 e dq
respectivamente. As correntes d e q são então comparadas com suas referências e o erro
produzido é tratado por blocos de controladores PI que produzem como saída as tensões
46
moduladoras ainda no referencial girante. Estas tensões passam por um bloco que
calcula a transformada inversa de Park e as suas componentes em 𝛼𝛽 são aplicadas a
um bloco que gera as componentes abc no espaço vetorial.
A referência de corrente direta é dada por uma variável global, que é um valor
fixo em simulação, mas que pode ser alterado em tempo real durante a aplicação prática
caso se faça necessário. Já a referência da corrente em quadratura é calculada pela
malha mais externa de controle da velocidade. A velocidade estimada é comparada à
referência e o erro é tratado por um bloco PI gerando o sinal de referência para 𝑖𝑞 .
Os blocos das transformadas direta e inversa de Park precisam dos vetores
unitários sin 𝛿 e cos 𝛿. Enquanto o controle da velocidade está inoperante, estes vetores
são gerados pela referência da velocidade. Quando o controle começa a operar o sinal
produzido pelo estimador de fluxo é aplicado.
Para estimar o fluxo do rotor e sua posição são utilizadas as correntes e tensões
projetadas no referencial 𝛼𝛽. As tensões são calculadas usando as moduladoras
produzidas, multiplicadas pelo valor da tensão no elo de corrente contínua.
A velocidade estimada é calculada pelo bloco estimador cujas entradas são as
projeções do fluxo do rotor no referencial 𝛼𝛽 e sua posição e as correntes também em
𝛼𝛽.
A simulação inicia e em 0,1s o controle da velocidade é iniciado. Em
aproximadamente 0,8s o sistema atinge o regime permanente e em 1,2s a referência de
velocidade é acrescida de 0,1pu. Em 1,5s o sistema atinge o regime permanente em
outro ponto de operação. A figura 13.5 mostra os resultados obtidos.
Figura 13.5: Resultado de simulação.
47
Os gráficos da figura mostram a referência de velocidade e as velocidades
estimada e medida no eixo do motor. Em baixa velocidade o motor se perde da
referência e o estimador o acompanha, como esperado. Em regime permanente ambos
convergem para um mesmo valor.
As correntes nos terminais da máquina também são mostradas e quando há uma
variação na velocidade a corrente nitidamente modifica sua amplitude e frequência.
A referência da corrente direta não é alterada e a corrente medida converge para
o valor esperado. A corrente em quadratura medida também segue a referência que se
altera com a variação da velocidade.
13.2.
Resultados Práticos
A partir da simulação feita de forma digital e com os blocos específicos para a
configuração e aplicação do F28335 da TI, foi gerado o código que opera o inversor
para acionar o motor de indução em bancada de teste. A bancada utilizada foi a mesma
mostrada na figura 7.2.
Com a ferramenta DSP Osciloscope foram dados os comandos de início e
variação da velocidade e observados os valores de referência e do estimador. A figura
13.6 mostra a velocidade de referência e a medida do estimador obtida na prática.
Figura 13.6: Estimador de velocidade no DSP Osciloscope.
Com o auxílio de um tacômetro, a velocidade foi medida quando o motor estava
em regime permanente nas duas referências de velocidade. As medidas feitas são
mostradas na figura 13.7. O valor da esquerda, referente a 0,25pu, equivale na prática a
0,245 e o valor da direita, referente a 0,35pu, equivale a 0,344 mostrando uma pequena
diferença que pode se dar pela imprecisão na medida.
48
Figura 13.7: Velocidade medida com um tacômetro.
Ainda utilizando o DSP Osciloscope, a figura 13.8 mostra a componente da
corrente em quadratura medida. No momento em que a referência de velocidade
aumenta o valor desta componente também aumenta.
Figura 13.8: Componente da corrente em quadratura medida.
Na figura 13.9 é mostrada a corrente medida em uma das fases do motor medida
com o auxílio de um osciloscópio. No instante em que a velocidade varia, a corrente
sofre uma mudança de fase e quando alcança o regime permanente sua amplitude
diminui e sua frequência aumenta.
49
Figura 13.9: Corrente medida em uma das fases do motor.
O gráfico da figura 13.10 é um comparativo entre a velocidade experimental e os
resultados da simulação. A curva em vermelho mostra a velocidade medida no eixo do
motor durante a simulação. As curvas em azul e verde são as velocidades estimadas na
simulação e na prática respectivamente. O resultado obtido na prática foi essencialmente
o mesmo da simulação a menos de uma parcela de ruído de alta frequência.
Figura 13.10: Comparativo entre resultado de simulação e experimental.
Os testes e a simulação mostrados anteriormente foram realizados com o motor
em vazio. A máquina possui um freio magnético acoplado ao seu eixo que se opõe ao
movimento do rotor. Este freio foi utilizado para realização de um teste com variação da
carga.
Com o motor em movimento na referência de velocidade mais alta (0,35pu) a
carga é adicionada e foi verificada uma variação transitória onde a velocidade cai
0,01pu e retorna ao valor da referência em cerca de 1s, como pode ser visto na figura
13.11.
50
Figura 13.11: Variação da velocidade com o acréscimo de uma carga.
A corrente em uma das fases do motor durante a inserção da carga é mostrada na
figura 13.12. No momento em que a carga varia há uma mudança na fase da corrente e
sua frequência aumenta refletindo a relação direta entre o torque, a corrente e o
escorregamento da máquina operando com velocidade constante.
Figura 13.12: Corrente medida na variação de carga.
51
Conclusão e Trabalhos Futuros
O trabalho desenvolvido apresentou um panorama do mercado mundial de
produtos eletrônicos de potência aplicados aos veículos elétricos de passeio.
O controle de um motor elétrico envolve diversos conceitos que foram
discutidos e testados. Dentre eles destacam-se as técnicas de modulação PWM e
SVPWM, o controle escalar e vetorial de corrente e as aplicações sem sensores.
As ferramentas de simulação são de grande importância para o desenvolvimento
dos sistemas a serem aplicados na prática. A partir delas é possível analisar os
problemas que podem ocorrer sem que seja preciso danificar qualquer equipamento.
As ferramentas de software possuem ainda bibliotecas específicas para alguns
controladores e com elas é possível programar o sistema que será embarcado no driver
graficamente.
O controle proposto foi testado e os resultados obtidos foram os esperados. O
desempenho do sistema de acionamento sem sensor mostrou que, apesar da sua
sensibilidade à variação de parâmetros, a sua aplicação em sistemas embarcados pode
ser bastante simples. É importante testar outros tipos de estimadores mais precisos e
menos sensíveis que são discutidos na literatura. Este tipo de acionamento é adequado
para as aplicações veiculares principalmente pela robustez atribuída ao sistema e pela
diminuição em seu custo.
Como proposta de trabalho futuro fica a configuração de uma interface homem
máquina (IHM) para o software desenvolvido na aplicação e a avaliação de outras
técnicas para eliminação de sensores mecânicos.
Fica também como trabalho futuro efetuar testes da operação com o fluxo de
energia no sentido reverso, ou frenagem regenerativa, que é uma funcionalidade
desejável quando se fala em eficiência do sistema.
Testes com potências maiores, próximas às nominais de um veículo de passeio, e
testes em campo também podem ser realizados futuramente.
52
Referências
[1] http://www1.eere.energy.gov/vehiclesandfuels/pdfs/program/eett_roadmap_12-710.pdf
[2] Plunkett, A.B.; Plette, D.L., "Inverter-Induction Motor Drive for Transit Cars,"
Industry Applications, IEEE Transactions on , vol.IA-13, no.1, pp.26,37, Jan. 1977.
[3] Mohan, Ned, and Tore M. Undeland. Power electronics: converters, applications,
and design. John Wiley & Sons, 2007.
[4] Bose, Bimal K. Modern power electronics and AC drives. Vol. 123. USA: Prentice
Hall, 2002.
[5] Tariq, A.R.; Nino-Baron, C.E.; Strangas, E.G., "Consideration of magnet materials
in the design of PMSMs for HEVs application," Power and Energy Society General
Meeting, 2011 IEEE , vol., no., pp.1,6, 24-29 July 2011.
[6] Boglietti, A.; EL-Refaie, A.M.; Drubel, O.; Omekanda, A.M.; Bianchi, N.;
Agamloh, E.B.; Popescu, M.; Di Gerlando, A.; Bartolo, J.B., "Electrical Machine
Topologies: Hottest Topics in the Electrical Machine Research Community,"
Industrial Electronics Magazine, IEEE , vol.8, no.2, pp.18,30, June 2014.
[7] Gieras, Jacek F. Permanent magnet motor technology: design and applications. CRC
press, 2002.
[8] http://www.ti.com/lsds/ti/apps/motor/applications.page
[9] http://sandyblogs.com/techlink/?p=2081
[10]
http://www.nxtbook.com/nxtbooks/sae/11EVSD0223/index.php#/34
[11]
http://www.arens.com/products/powerelectronics/tractioninvertors.cfm
[12]
http://www.infineon.com/cms/en/product/channel.html?channel=db3a30432ba3f
a6f012be33e87b75915
[13]
http://www.neweagle.net/
[14]
http://www.methode.com/power/Smart-Power-Stack.html#.UzHmvvldWSo
[15]
http://www.pwrx.com/
[16]
http://www.semikron.com/products/product-lines/skai.html
[17]
http://www.industry.siemens.com/topics/global/en/electric-vehicle/sivetec-
components/Pages/sivetec-power-electronics.aspx
[18]
http://www.weg.net/br/Media-Center/Noticias/Produtos-e-Solucoes/WEG-
equipa-primeiro-onibus-eletrico-do-pais-movido-100-a-bateria
53
[19]
http://www.weg.net/br/Produtos-e-Servicos/Drives/Inversores-de-
Frequencia/CVW300
[20]
Chapman, Stephen. Electric machinery fundamentals. McGraw-Hill, Inc., 2nd
ed., 1991.
[21]
Júnior, José de Alencar Silva. “Controle Robusto H∞ Aplicado Em Motores de
Indução”. Dissertação, COPPE/UFRJ, 2003.
[22]
Stephan, Richard M. "Acionamento, Comando e Controle de Máquinas
Elétricas." Universidade Federal do Rio de Janeiro. Rio de Janeiro (2008).
[23]
van der Broeck, H.W.; Skudelny, H.-C.; Stanke, G.V., "Analysis and realization
of a pulsewidth modulator based on voltage space vectors," Industry Applications,
IEEE Transactions on , vol.24, no.1, pp.142,150, Jan/Feb 1988
[24]
Menezes, Ana Letícia da Silva. “Técnicas de Controle de Tensão e Corrente
Aplicadas à Conexão de Aerogeradores à Rede Elétrica”. Projeto de Graduação,
UFRJ, 2006.
[25]
Hoberock, L. L. "A survey of longitudinal acceleration comfort studies in
ground transportation vehicles," Journal of Dynamic Systems, Measurement, and
Control 99.2 (1977): 76-84.
[26]
Kron, Gabriel, "Steady-State Equivalent Circuits of Synchronous and Induction
Machines," American Institute of Electrical Engineers, Transactions of the , vol.67,
no.1, pp.175,181, Jan. 1948.
[27]
Ogata, Katsuhiko, and Yanjuan Yang. "Modern control engineering." (1970): 1.
[28]
Dorf, Richard C. Modern control systems. Addison-Wesley Longman Publishing
Co., Inc., 1995.
[29]
Stanley, H. C., "An analysis of the induction machine," Electrical Engineering,
vol.57, no.12, pp.751,757, Dec. 1938.
[30]
“Digital Motor Control, Software Library: Target Independent Math Blocks.
2012.” Texas Instruments, Inc., C2000 Systems and Applications (2012).
[31]
Akin, Bilal, and Manish Bhardwaj. "Sensorless Field Oriented Control of 3-
Phase Induction Motors." Texas Instruments, Inc., C2000 Systems and Applications
(2010).
54