UNIVERSIDADE FEDERAL DE OURO PRETO - UFOP
ESCOLA DE MINAS – EM
COLEGIADO DO CURSO DE ENGENHARIA DE CONTROLE
E AUTOMAÇÃO – CECAU
EFEITO DA VARIAÇÃO DA VELOCIDADE DO FLUXO DE AR NA
DETERMINAÇÃO DO COEFICIENTE CONVECTIVO DE CALOR
UTILIZANDO-SE O INVERSOR DE FREQÜÊNCIA
MONOGRAFIA DE GRADUAÇÃO EM ENGENHARIA DE CONTROLE E
AUTOMAÇÃO
WESLLEY FERREIRA DE MORAIS
Ouro Preto, 2008
ii
WESLLEY FERREIRA DE MORAIS
EFEITO DA VARIAÇÃO DA VELOCIDADE DO
FLUXO DE AR NA DETERMINAÇÃO DO
COEFICIENTE CONVECTIVO DE CALOR
UTILIZANDO-SE O INVERSOR DE FREQÜÊNCIA
Monografia apresentada ao Curso de Engenharia de
Controle e Automação da Universidade Federal de
Ouro Preto como parte dos requisitos para a obtenção
de Grau em Engenheiro de Controle e Automação.
Orientador: Henor Artur de Souza
Ouro Preto
Escola de Minas – UFOP
Julho / 2008
iii
iv
EPÍGRAFE
“A vida está cheia de desafios que, se aproveitados de
forma criativa, transformam-se em oportunidades.”
(Maxwell Maltz)
v
DEDICATÓRIA
Dedico este trabalho primeiramente a Deus por ser fonte
de inspiração; aos meus pais e minhas irmãs pelo grande
apoio; e a todas as outras pessoas que me ajudaram, direta
ou indiretamente, a acreditar no meu potencial e na minha
capacidade para ser não só um profissional bem sucedido,
mas um ser humano realizado. Sei que cada um estará
torcendo por meu sucesso, não importa se longe ou perto.
vi
AGRADECIMENTOS
Agradeço a Deus, por ter me dado todas as condições de realizar esse trabalho em meio às
adversidades.
Aos meus pais que sempre me apoiaram e deram todo suporte necessário, as minhas irmãs por
toda paciência e por todos incentivos.
Ao professor Henor Artur de Souza pelas contribuições tão valiosas e, sobretudo, pela
generosidade e apoio na conclusão desse trabalho.
Ao amigo Germano Moreira Campos pela colaboração nesse trabalho.
Agradeço também a todos os professores que cooperaram com nosso aprendizado durante
todos estes anos de graduação.
vii
SUMÁRIO
LISTA DE FIGURAS
ix
LISTA DE TABELAS
xi
LISTA DE SIGLAS E ABREVIATURAS
xii
RESUMO
xiii
ABSTRACT
xiv
I
II
INTRODUÇÃO
1
1.1
Descrição do Problema
1
1.2
Objetivo
2
1.2.1
Objetivo Geral
2
1.2.2
Objetivos Específicos
2
1.3
Metodologia
2
1.4
Estrutura do trabalho
3
FUNDAMENTAÇÃO TEÓRICA
4
2.1
Transferência de Calor e Massa
4
2.1.1
Analogia de Reynolds e Chilton-Colburn
6
2.2
Motor de Indução
9
2.2.1
Composição do Motor de Indução Trifásico
10
2.2.2
Princípio de Funcionamento
12
2.2.3
Velocidade do Campo Girante
13
2.2.4
Velocidade do Rotor
14
2.2.5
Escorregamento
14
2.2.6
Controle de Velocidade dos Motores de Indução
15
2.3
Inversor de Freqüência
15
2.3.1
Princípio de Funcionamento
17
2.3.2
Estrutura do Inversor de Freqüência
17
2.3.3
Modos de Controle
20
2.3.4
Curva Tensão x Freqüência
21
2.3.5
Como Instalar um Inversor de Freqüência
22
2.3.6
Parâmetros do Inversor de Freqüência
23
viii
III
IV
2.3.6.1 Parâmetros de Leitura
24
2.3.6.2 Parâmetros de Configuração
24
2.3.6.3 Parâmetros de Regulação
25
2.3.6.4 Parâmetros do Motor
25
2.3.7
Harmônicas aplicadas a Inversores de Freqüência
25
2.3.8
Vantagens
27
2.3.9
Especificação do Inversor de Freqüência
27
2.4
Medidores de Temperatura
28
2.4.1
Termopar
29
2.4.1.1 Efeito Seebeck
30
2.4.1.2 Efeito Peltier
30
2.4.1.3 Efeito Thomson
31
2.4.2
31
Leis de Utilização dos Termopares
2.4.2.1 Dois Metais Duas Junções
31
2.4.2.2 Independência da Temperatura de Circuito
32
2.4.2.3 Metais Intermediários nas Ligações
32
2.4.2.4 Metais Intermediários nas Junções
33
2.4.2.5 Lei das Temperaturas Sucessivas
33
2.4.2.6 Lei dos Metais Sucessivos
34
2.4.3
Tipos de Termopares
34
2.4.4
Tensão x Temperatura
35
2.5
Anemômetro
37
METODOLOGIA ADOTADA
38
3.1
Base Experimental
38
3.2
Determinação do Fator j
41
RESULTADOS
44
4.1 Parâmetros Utilizados
44
4.2 Resultados Obtidos
46
4.3 Discussões dos Resultados
49
V
CONSIDERAÇÕES FINAIS
52
VI
REFERÊNCIAS BIBLIOGRÁFICAS
53
ix
LISTA DE FIGURAS
Figura 2.1 - Partes constituintes do motor de indução ............................................................. 11
Figura 2.2 - Imã permanente suspenso por um fio ................................................................... 12
Figura 2.3 - Gaiola e campo girante ......................................................................................... 13
Figura 2.4 - Inversor Weg, modelo CFW - 08.......................................................................... 16
Figura 2.5 - Diagrama de blocos de um inversor de freqüência ............................................... 17
Figura 2.6 - Estrutura básica de um inversor de freqüência ..................................................... 18
Figura 2.7 - Inversor monofásico simplificado ......................................................................... 19
Figura 2.8 - Condução dos transistores .................................................................................... 20
Figura 2.9 - Curva V/f .............................................................................................................. 21
Figura 2.10 - Diagrama de ligação ........................................................................................... 23
Figura 2.11 - Curvas de carga e descarga do capacitor interno e circuito retificador .............. 26
Figura 2.12 - Forma de onda da corrente de entrada de um retificador trifásico comparado
com a senóide correspondente ........................................................................................ 26
Figura 2.13 - Circuito de um termopar ..................................................................................... 29
Figura 2.14 - Circuito da experiência de Seebeck .................................................................... 30
Figura 2.15 -O efeito Peltier ..................................................................................................... 30
Figura 2.16 - Esquema simples de um termopar ...................................................................... 31
Figura 2.17 - Tensão independente da temperatura do percurso .............................................. 32
Figura 2.18 - Presença de metal intermediário na ligação ........................................................ 32
Figura 2.19 - Presença de material intermediário em uma das junções ................................... 33
Figura 2.20 - Lei das temperaturas sucessivas ......................................................................... 33
Figura 2.21 - Lei dos metais sucessivos ................................................................................... 34
Figura 2.22 - Relação entre força eletromotriz e temperatura .................................................. 36
Figura 2.23 - Anemômetro de conchas... ............................................................................. 37
x
Figura 3.1 - Cavidade interna do molde ............................................................................... 39
Figura 3.2 - Molde sobre a placa polida ................................................................................... 39
Figura 3.3 - Direção de ataque do fluxo de ar .......................................................................... 40
Figura 3.4 - Seção transversal do túnel de vento mostrando placa........................................... 41
Figura 4.1 – Variação do fator j com o número de Reynolds, ângulo de ataque de 0° ............ 50
Figura 4.2 - Variação do fator j com o número de Reynolds, ângulo de ataque de 25° ........... 50
xi
LISTA DE TABELAS
Tabela 2.1 - Limite de erro e faixa de uso, com junção de referência a 0 ºC .......................... 34
Tabela 2.2 - Aplicação para os termopares............................................................................... 35
Tabela 2.3 - Valores dos coeficientes polinomiais ................................................................... 36
Tabela 4.1 –Valores de freqüência e velocidade ...................................................................... 45
Tabela 4.2 - Valores dos parâmetros encontrados para o ângulo 0°......................................... 47
Tabela 4.3 - Valores dos parâmetros encontrados para o ângulo 25°....................................... 48
xii
LISTA DE SIGLAS E ABREVIATURAS
AC – Alternating Current
CA – Corrente Alternada
CC – Corrente Contínua
CLC – Camada Limite de Concentração
CLT – Camada Limite Térmica
DC - Direct Current
IGBT – Transistor Bipolar de Gate Isolado
IHM – Interface Homem-Máquina
NS – Norte-Sul
PWM - Pulse-Width Modulation
Vca - Volts em Corrente Alternada
Vcc – Volts em Corrente Contínua
xiii
RESUMO
Neste trabalho obtêm-se correlações que permitam calcular o coeficiente de transferência de
calor por convecção, h, para placas horizontais e inclinadas. Os coeficientes são determinados
experimentalmente utilizando-se a analogia entre o mecanismo de transferência de massa e o
mecanismo de transferência de calor. Os experimentos de transferência de massa são
executados com a sublimação do naftaleno, controlando-se o fluxo de ar. Este controle é feito
utilizando-se o inversor de freqüência, dispositivo que controla a rotação do motor
e
conseqüentemente o fluxo do ar. Com o objetivo de obter uma apresentação dos resultados
aplicáveis tanto a transferência de calor quanto a transferência de massa, os fatores j de
Colburn são empregados. De acordo com a analogia entre a transferência de calor e massa, os
fatores j são iguais para os dois modos de transferência. Conhecido o fator j para transferência
de massa e o número de Reynolds do experimento, plota-se o fator j versus número de
Reynolds e assim, determina-se os coeficientes da relação. Neste trabalho há variação no
número de Reynolds e como os experimentos são realizados a temperaturas constantes, os
números adimensionais de Schmidt e Prandtl permanecem constantes. São analisadas
superfícies planas que simulam a configuração geométrica das superfícies externas das
edificações e os resultados demonstram que o valor do fator j de Colburn decresce com o
aumento de Reynolds.
Palavras-chave: Convecção, Controle, Transferência, Reynolds, Analogia.
xiv
ABSTRACT
In this monograph it is obtained correlations to allow to calculate the coefficient of heat
transfer for convection, h, for horizontal and sloping plates. The coefficients are certain
experimentally being used the analogy between mechanism of mass transfer and the
mechanism of heat transfer. The experiments of mass transfer are executed with the
sublimation of the naphthalene, controlling air flow. This control is made being used the
frequency inverter, device that control the rotation of the motor and consequently air flow .
With the objective of obtaining a presentation of the applicable results as much heat transfer
heat as mass transfer, the factors j of Colburn are used. In agreement with the analogy
between the transfer of heat and mass, the factors j are same for two transfer manners. Once
known the factor j for mass transfer and
Reynolds number of the experiment, it plots the
factor j versus number of Reynolds and like this, it determines the coefficients of the relation.
In this work there is just variation in the number of Reynolds and as the experiments they are
admitted happen to constant temperatures, the numbers of Schmidt and Prandtl are admitted
constant. They are analyzed planes surfaces that simulate the geometric configuration of the
external surfaces of the constructions. The results demonstrate that the value of factor j of
Colburn decreases with increases of Reynolds.
Key words: Convection, Control, Transfer, Reynolds, Analogy.
1
CAPÍTULO I
I. INTRODUÇÃO
1.1 - Descrição do Problema
Não é difícil observar que no Brasil, o homem ao implementar a construção de edifícios,
residenciais, comerciais ou industriais, depara-se com um grande problema que normalmente
não é resolvido de forma satisfatória: o aproveitamento do ar para refrigeração de ambientes e
equipamentos.
Nesse sentido, nota-se que muitas construções, sistemas de ventilação e ar condicionado não
utilizam de forma muito racional as potencialidades que o ambiente oferece, o que resulta,
não raramente, em sub-aproveitamento desses recursos e/ou incorre-se no problema de mal
aproveitamento energético gerando custos materiais e desgastes dos equipamentos muitas
vezes desnecessários.
Este trabalho consiste na obtenção do coeficiente convectivo de massa e, analogamente, o
coeficiente convectivo de calor por meio de experimentos em um túnel de vento variando-se a
velocidade do fluxo de ar.
Os resultados obtidos ao final dos experimentos podem de forma significativa contribuir na
quantificação da convecção de calor em relação a superfícies planas e assim uma melhor e
mais eficiente utilização dos dispositivos de fluxo de ar, tanto em equipamentos
eletromecânicos, como para seu uso na climatização de edifícios, maior eficiência nos
sistemas de ar condicionado, economia de energia.
2
1.2 – Objetivos
Os Objetivos deste trabalho podem ser divididos em objetivo geral e objetivos específicos.
1.2.1 - Objetivo Geral
Determinar o coeficiente de transferência de calor por convecção, em relação à superfícies
planas, utilizando a analogia entre o mecanismo de transferência de calor e de massa.
1.2.2 - Objetivos Específicos
Como objetivos específicos para a execução deste trabalho destacam-se:
•
Estudo e revisão dos processos de transferência de calor e de massa;
•
Estudo do processo de transferência de massa via sublimação do naftaleno;
•
Técnicas de controle de fluxo e variação da velocidade do fluxo de ar utilizando-se
inversor de freqüência.
1.3- Metodologia
O trabalho é desenvolvido via uma abordagem experimental. O coeficiente de transferência de
calor, sobre superfícies planas, é determinado utilizando-se o processo de sublimação do
naftaleno e a analogia entre os processos de transferência de calor e de massa. Utiliza-se um
túnel de vento controlando-se o fluxo de ar com um inversor de freqüência.
3
1.4-
Estrutura do trabalho
No primeiro capítulo faz-se uma breve descrição do problema, os objetivos que fazem
necessário para este estudo e um resumo da metodologia utilizada afim de obter resultados
concisos.
No segundo capítulo tem-se o estudo dos conceitos básicos da transferência de calor e
transferência de massa considerando apenas o processo de convecção, e a analogia entre
transferência de calor e transferência de massa, a descrição dos equipamentos utilizados,
explicando o principio de funcionamentos destes, faixa de aplicação, e algumas
particularidades.
No terceiro capítulo descreve-se de forma mais detalhada a metodologia utilizada durante
todo o trabalho.
No quarto capítulo cita-se os parâmetros utilizados no inversor de freqüência para controle do
motor, os resultados obtidos durante o experimento e resultados teóricos, e discussões a
respeito dos resultados.
4
CAPÍTULO II
II. FUNDAMENTAÇÃO TEÓRICA
2.1 Transferência de Calor e Massa
Havendo um gradiente de temperatura ou de concentração, ocorrem os fenômenos de
transferência de calor (condução, convecção e radiação) e massa (condução, convecção)
sendo três os tipos básicos (INCROPERA; DE WITT, 2004).
Em convecção, quando um fluido com velocidade e temperatura definidas escoa sobre uma
superfície cuja temperatura é diferente, ocorre o fenômeno de transferência de calor. Tal fluxo
de calor é proporcional a um coeficiente médio de transferência de calor por convecção h
como indicado na equação 2.1.
De forma análoga, um coeficiente médio de transferência de massa hD é o fator de
proporcionalidade entre o fluxo mássico e a diferença de concentração de uma espécie entre o
fluido em escoamento e a concentração da mesma espécie na superfície, como indicado
na equação 2.2. É um fenômeno que ocorre tipicamente na evaporação ou sublimação de um
fluido sobre uma superfície.
(2.1)
(2.2)
onde q é a taxa de calor (W), h é o coeficiente de transferência de calor por convecção
(W/m2.K) sendo Ts a temperatura na superfície (°C) e T∞ a temperatura do fluido (°C), ρ é a
concentração da espécie transferida, tipicamente um vapor (kg/m3),
espécie (kg/s) e hD o coeficiente de convecção de massa (m/s).
é o fluxo de massa da
5
Numerosos são os fatores que influenciam a determinação dos coeficientes convectivos que
dependem da geometria, das propriedades do fluido em escoamento e das condições deste. A
explicação para esta complexa dependência está na influência que a camada limite, que
forma-se sobre a superfície, tem sobre os fenômenos de transferência de calor e massa.
Como os mecanismos de transferência de massa, quantidade de movimento e calor estão
intimamente relacionados, pode-se esperar que os dados obtidos para uma operação de
transferência sejam úteis para prever a quantidade transferida por unidade de tempo nas outras
operações.
A implicação mais importante da analogia entre a transferência de calor e a transferência de
massa é a de as relações adimensionais que governam o comportamento da camada limite
térmica (CLT), serem as mesmas que governam a camada limite de concentração (CLC).
Então, o perfil de temperatura na CLT, e o perfil de concentração na CLC, devem ter a mesma
forma funcional. Isto é, as expressões dos números de Nusselt médio, Nu, e de Sherwood
médio, Sh, têm a mesma forma.
Nu= Nu(Rex, Pr)
(2.3)
Sh= Sh(Rex, Sc)
(2.4)
.
Onde,
(2.5)
e
(2.6)
6
onde Re é o número de Reynolds; Pr é o número de Prandtl; Sc é o número de Schmidt; x é
uma dimensão característica da superfície sólida, k é condutividade térmica do fluido
(W/m.K) e DAB é o coeficiente de difusão da espécie A na mistura A + B (m2/s).
Portanto, as relações da transferência de massa e as de transferência de calor, numa certa
geometria, são intercambiáveis.
A relação entre os dois coeficientes de convecção pode ser dada por:
(2.7)
sendo Le o número de Lewis, dado por,
(2.8)
onde ρ é a massa específica do fluido (kg/m3); cp é o calor específico do fluido (J/kg.K) e α é
a difusividade térmica (m2/s) e na maior parte das aplicações, é razoável admitir o valor 1/3
para n (INCROPERA; DE WITT, 2004).
2.1.1 - Analogia de Reynolds e Chilton-Colburn
Relaciona-se o coeficiente de atrito e a transferência de calor e de massa para escoamento
laminar da seguinte forma:
(2.9)
sendo Cf o coeficiente de atrito na interface superfície-fluido.
Dividindo a igualdade anterior por Re obtêm-se dois novos grupos adimensionais,
denominados número de Stanton (St) e número de Stanton para transferência de massa (Stm).
Contudo a equação (2.9) está limitada à hipótese de que Pr e Sc sejam, aproximadamente, iguais a um
(01) e que a variação da pressão ao longo do escoamento seja nula. Entretanto, correções
introduzidas habilitam esta analogia a ser aplicada em uma ampla faixa de valores de Pr e Sc,
7
analogia de Reynolds,
=Nu = Sh
(2.10)
St = Stm
(2.11)
com,
(2.12)
,
(2.13)
sendo u∞ a velocidade do fluido.
São numerosas as restrições associadas a relação dada pelas expressões (2.12) e (2.13). Além
de se fundamentar na validade das aplicações das camadas limites, a exatidão acima depende
de se ter Pr e Sh iguais a 1 e
adimensional,
aproximadamente nula, onde
é uma variável independente adimensional,
é uma pressão
representa a influencia
da geometria sobre a distribuição da velocidade.
A analogia de Chilton-Colburn pode então ser aplicada aos escoamentos tanto laminares
quanto turbulentos. A seguir têm-se as equações e seus intervalos de validade.
0,6 < Pr < 60
(2.14)
8
(2.15)
0,6 < Sc< 3000
onde j é o fator de Colburn para a transferência de calor e para a transferência de massa. No
escoamento laminar as relações acima são apropriados quando
, mas no escoamento
turbulento as condições são menos sensíveis aos efeitos dos gradientes de pressão e estas
equações permanecem aproximadamente válidas.
Para muitas situações práticas os coeficientes de transferência de calor por convecção, h, e os
coeficientes de transferência de massa por convecção, hD, são obtidos por meio de relações
empíricas (2.3) e (2.4),
,
(2.16)
para a transferência de massa, onde Rex é o número de Reynolds, Sc é o número de Schmit e
Shx é o número de Sherwood, dado pela relação:
(2.17)
e D é o coeficiente de difusão de massa e x é a dimensão característica (no caso do
escoamento sobre uma superfície plana é a dimensão paralela ao escoamento) e,
,
(2.18)
para a transferência de calor, onde Pr é o número de Prandtl e Nux é o número de Nusselt,
dado pela relação,
(2.19)
9
sendo k a condutividade térmica do fluido.
De acordo com a analogia entre transferência de calor e massa, tem-se que:
a=d
b=e
c=f
(2.20)
No caso de uma placa com a superfície paralela ao escoamento (ângulo de ataque igual a
zero), esses valores em regime laminar já são conhecidos (INCROPERA; DE WITT, 2004).
a = d = 0,664
b = e = 0,500
c = f = 0,333
(2.21)
Para outros ângulos de ataque estes coeficientes devem ser determinados. Essas outras
posições são interessantes, pois simulam a configuração geométrica das superfícies externas
de edificações.
Neste trabalho os coeficientes de transferência de calor por convecção serão determinados por
meio da analogia entre a transferência de massa e a transferência de calor, utilizando-se um
método experimental. Os resultados deste trabalho possuem diversas aplicações, mas neste
caso serão utilizadas em paredes de edificações possibilitando projetos de climatização mais
adequados.
2.2 - Motor de indução
O motor de indução trifásico, inventado pelo Croata Nikola Tesla em 1886, na França, e
reconhecido nos EUA a partir de 1916, é meramente um transformador cujo circuito
magnético é separado por um entreferro, entre duas partes que mantêm movimento relativo
entre si, sendo classificado como uma máquina assíncrona.
10
A característica principal que difere esta máquina das demais de corrente alternada é que a
corrente secundária é criada somente por indução, e nunca imposta por uma fonte externa. As
máquinas de indução são máquinas de excitação única: uma tensão alternada é aplicada
diretamente aos enrolamentos do estator e por indução ao rotor.
Este tipo de motor pode ser considerado como um transformador generalizado, no qual ocorre
transformação de potência elétrica entre estator e rotor, com mudança de frequência e com
fluxo de potência mecânica.
Os motores de indução trifásico são os motores mais utilizados em instalações industriais
devido à sua simplicidade do funcionamento, a robustez, os baixos custos de compra e
manutenção e elevada vida útil.
2.2.1- Composição do motor de indução trifásico
Segundo Magaldi (1981, p.406) o motor de indução consiste de duas partes principais: o
estator e o rotor. Na figura 2.1 demonstra-se alguns componentes do motor de indução. Em
relação ao estator, este constitui-se basicamente dos seguintes componentes:
•
Carcaça (1) – É a estrutura que suporta o conjunto; de construção robusta,
normalmente de ferro fundido ou aço, resistentes a corrosão e com aletas;
•
Núcleo de chapas (2) – As chapas são de aço magnético (material ferromagnético),
tratadas termicamente para reduzir ao mínimo as perdas no ferro.
•
Enrolamento trifásico (8) – Três conjuntos iguais de bobinas, uma para cada fase,
formando um sistema trifásico ligado à rede trifásica de alimentação.
Já em relação ao rotor, tem-se:
•
Eixo (7) – Transmite a potência mecânica desenvolvida pelo motor.
11
•
Núcleo de chapas (3) – As chapas possuem as mesmas características das chapas do
estator;
•
Barras e anéis de curto-circuito (12) – São de alumínio injetado sob pressão numa
única peça;
Além do estator e rotor, o motor de indução também constitui-se de parte periféricas, tais
como:
•
Tampa (4);
•
Ventilador (5);
•
Tampa defletora (6);
•
Caixa de ligação (9);
•
Terminais (10);
•
Rolamentos (11);
Figura 2.1 – Partes constituintes do motor de indução
FONTE: MOTORES..., 2001
12
2.2.2 - Princípio de funcionamento
O princípio de funcionamento de um motor de indução pode ser entendido com a ajuda do
esquema montado na figura 2.2, onde se mostra um imã permanente em formato de ferradura
que está suspenso, por meio de um fio, sobre um leve disco metálico que pode girar
facilmente em torno de seu eixo, graças a uma suspensão cônica apoiada em uma base fixa.
Figura 2.2 – Imã permanente suspenso por um fio
FONTE: MOTORES..., 2001
Imagine que o imã permanente começa a girar em torno de seu eixo, por exemplo torcendo-se
o fio, enquanto o disco está parado. O fluxo magnético NS produzido pelo imã começa a
varrer a superfície do disco, caracterizando um fluxo variável ao longo do tempo. Essa
variação produz a indução de uma tensão no disco, e conseqüentemente a circulação de
correntes, pois o disco é metálico. Essas correntes induzidas têm sentido de circulação
determinados pela lei de Lenz (o fluxo criado por elas deve se opor à variação do fluxo), de
tal modo que criam no disco polaridades magnéticas opostas aos pólos do imã permanente.
Sob o pólo norte do imã cria-se um pólo sul no disco, que se atraem. No outro pólo acontece a
mesma coisa. Em conseqüência, o disco gira no mesmo sentido do movimento do imã. Se o
sentido de rotação do imã permanente for invertido, também inverte-se o sentido de giro do
disco.
13
Essa montagem mostrada na figura 2.2 apenas descreve o princípio de funcionamento, sendo
que em um motor de indução real, o imã permanente girando é substituído por um campo
girante criado por três bobinas fixas no estator, nas quais circulam correntes alternadas
defasadas de 120 graus, e o disco metálico é substituído por um rotor cilíndrico na forma de
uma gaiola metálica, como ilustrado na figura 2.3. Note que a gaiola possui aros metálicos na
tampa e na base, de tal modo a curto-circuitar as varetas e permitir a circulação de correntes
por elas.
Figura 2.3 : Gaiola e campo girante
FONTE: MOTORES..., 2001
2.2.3 - Velocidade do campo girante
A velocidade do campo girante em um motor de indução é chamada velocidade síncrona. Essa
velocidade depende da freqüência da tensão trifásica de alimentação do motor. Quanto maior
a freqüência, maior a velocidade. Para motores de indução, a relação entre velocidade do
campo girante, freqüência da tensão e número de pólos é:
(2.22)
em que ns é a velocidade do campo girante (síncrona) em rpm, o número de pólos é p e f é
a freqüência expressa em hertz (Hz).
14
2.2.4 - Velocidade do rotor
Em qualquer motor de indução, a velocidade do rotor (que é a mesma do eixo) é sempre
menor que a velocidade síncrona (do campo girante). Se, por hipótese, o rotor conseguisse
alcançar a velocidade síncrona, então o campo girante e o rotor gaiola estariam efetivamente
parados (um em relação ao outro), não haveria variação relativa de fluxo e portanto indução.
Em regime permanente, a velocidade do rotor depende da diferença relativa das freqüências
da tensão de alimentação e da tensão induzida no rotor, da seguinte forma:
(2.23)
em que nr é a velocidade do rotor e fr é a freqüência da tensão induzida no rotor, em Hz.
2.2.5 – Escorregamento
A diferença relativa entre a velocidade do rotor e a velocidade síncrona em um motor de
indução é expressa por meio de um parâmetro chamado escorregamento, símbolo s, definido
da seguinte maneira:
(2.24)
Por ser uma grandeza adimensional e menor que um, o escorregamento é expresso
normalmente em porcentagem.
15
2.2.6 - Controle de velocidade dos motores de indução
Em algumas aplicações de motores de indução é necessário controlar a velocidade de
acionamento da carga, por exemplo, em uma esteira transportadora ou mesmo em veículos de
transporte. Um modo freqüentemente usado para variar de maneira controlada a velocidade de
motores de indução é por meio da variação da freqüência da tensão de alimentação. Sabe-se
que a velocidade do campo girante é diretamente proporcional ao valor da freqüência e que a
velocidade do motor depende da velocidade do campo girante.
A variação da freqüência é obtida por meio de um inversor de freqüência (também chamado
conversor de freqüência) que deve ser instalado entre a fonte de tensão e o motor a ser
controlado.
2.3 - Inversor de Freqüência
O inversor de freqüência, também chamado por alguns fabricantes de conversor de freqüência
é um equipamento capaz de controlar a velocidade e torque de motores de corrente alternada.
Este equipamento de baixo custo para o controle de velocidade de motores de indução
trifásicos permite uma economia de energia sem prejudicar a qualidade final do sistema.
Também é usado para atuar como dispositivo de proteção para os mais variados problemas da
rede elétrica que se pode ocorrer, como desbalanceamento entre fases, sobrecarga, queda de
tensão. Por muito tempo, utilizou-se dispositivos secundários mecânicos, hidráulicos ou
elétricos para a mesma função do inversor de freqüência, entretanto, não eram tão confiáveis e
precisos.
Os inversores variam as velocidades dos motores de acordo com a maior ou menor
necessidade de vazão ou pressão ou temperatura de uma zona de controle. Ao diminuir a
16
velocidade, os inversores proporcionam grande economia de energia. Tal efeito não ocorre
com as válvulas tradicionais onde a vazão é reduzida, porém, o motor continua operando na
mesma velocidade, pressionando o fluído sobre a entrada da válvula, absorvendo a mesma
potência. Outro ponto positivo deve-se a possibilidade de reduzir os custos de manutenção
porque os inversores possibilitam que os motores sejam acionados suavemente, ou seja, sem
trancos. Com isso, reduz-se a quebra de elementos de transmissão como correntes e rodas
dentadas, ocorrências freqüentes em virtude do esforço adicional provocado pelos motores
com partida direta.
Atualmente, os inversores são amplamente utilizados tanto em indústrias de processo quanto
em manufaturas, tais como linhas de montagem, automobilísticas, bebidas e alimentícias,
papel e celulose e petroquímicas.
Existem várias empresas que fabricam inversores de freqüências, que apresentam
características e funcionamento semelhantes, mas que podem variar de acordo com a faixa de
atuação, tanto da freqüência quanto da potência. Alguns exemplos de empresas fabricantes
são: Weg, Mitsubishi Electric, Siemens, Hitachi, Fuji Electric, General Electrics, dentre várias
outras, figura 2.4.
Figura 2.4 - Inversor Weg, modelo CFW - 08
FONTE: ACIONAMENTOS..., 2007
17
2.3.1 - Princípio de Funcionamento
O inversor é ligado na rede, podendo ser monofásica ou trifásica, e em sua saída há uma carga
que necessita de uma freqüência diferente da rede. O bloco retificador converte a tensão
alternada em tensão contínua, o filtro regula a tensão retificada com armazenamento de
energia por meio de capacitores. Enquanto o bloco inversor re-converte a tensão contínua em
tensão alternada cuja freqüência é determinada pelo usuário de acordo com a velocidade
desejada, sendo que quanto maior a freqüência, maior a velocidade do motor, figura 2.5.
Figura 2.5- Diagrama de blocos de um inversor de freqüência
FONTE: PIRES, 2006
2.3.2 - Estrutura do Inversor de Freqüência
Independentemente do fabricante, e até modelo, a estrutura básica do inversor é a mesma,
conforme ilustrado na figura 2.6. O que muda significativamente de um tipo para outro é a
filosofia de controle. Pode-se notar que a rede AC é retificada logo na entrada. Através de um
capacitor (filtro), forma-se um barramento de tensão contínua (barramento DC), ou circuito
intermediário. A tensão DC, que, pode chegar a 380 Vcc para redes trifásicas de 220VCA.
18
Figura 2.6: Estrutura básica de um inversor de freqüência
FONTE: ACIONAMENTOS..., 2007
Os IGBT’s (transistor bipolar de gate isolado) são chaveados três a três formando uma tensão
alternada na saída U, V, e W, defasadas de 120° elétricos, exatamente como a rede. A única
diferença é que, ao invés de uma senóide, tem-se uma forma-de-onda quadrada. Portanto, o
motor elétrico AC alimentado por um inversor tem em seus terminais uma onda quadrada de
tensão.
Embora a grande maioria dos inversores de freqüência encontrados no mercado sejam
trifásicos, para fins didáticos, utiliza-se um modelo monofásico no intuito de explicar como
uma tensão DC pode tornar-se AC.
Na figura 2.7 ilustra-se um diagrama de um inversor monofásico. A diferença entre o
trifásico é que ele possui apenas quatro transistores “chaveadores” na saída.
19
Figura 2.7: Inversor monofásico simplificado
FONTE: ACIONAMENTOS..., 2007
O funcionamento é simples: a tensão da rede é retificada e filtrada, formando um barramento
DC. De um lado da ponte de transistores tem-se um pólo positivo, e do outro negativo.
Imaginem que a lógica de controle, representada agora como apenas um bloco, envie pulsos
de disparo para os transistores na seguinte ordem: ora TR1 e TR4 conduzem, ficando TR2 e
TR3 em corte; ora TR2 e TR3 em condução, e TR1 e TR4 em corte.
Repara-se que no primeiro comando a corrente circula pelo motor no sentido de A para B. Já,
na segunda situação, a corrente circula no sentido oposto, ou seja, de B para A, conforme
visto na figura 2.8.
Está feita uma corrente alternada por meio de um barramento DC. O mesmo vale para
circuitos trifásicos, basta a lógica de controle obedecer a uma seqüência correta de disparo.
Em circuitos trifásicos os transistores são disparados três a três, sendo sempre dois na parte
superior da ponte de IGBT’s, e um na inferior, e vice-versa.
20
Figura 2.8: Condução dos transistores
FONTE: ACIONAMENTOS..., 2007
2.3.3 - Modos de controle
Basicamente existem dois tipos de controle dos inversores de freqüência: o escalar e o
vetorial.
O controle escalar baseia-se no conceito original do conversor de freqüência: impõe no motor
uma determinada tensão/freqüência, visando manter a relação V/f constante, ou seja, o motor
trabalha com fluxo aproximadamente constante. É aplicado quando não há necessidade de
respostas rápidas a comandos de torque e velocidade e é particularmente interessante quando
há conexão de múltiplos motores a um único inversor. O controle é realizado em malha aberta
e a precisão da velocidade é função do escorregamento do motor, que varia em função da
carga, já que a freqüência no estator é imposta. O controle escalar é o mais utilizado devido à
sua simplicidade e devido ao fato de que a grande maioria das aplicações não requer alta
precisão e/ou rapidez no controle da velocidade.
O controle vetorial possibilita atingir um elevado grau de precisão e rapidez no controle do
torque e da velocidade do motor. O controle decompõe a corrente do motor em dois vetores:
um que produz o fluxo magnetizante e outro que produz torque, regulando separadamente o
torque e o fluxo.
21
2.3.4 - Curva Tensão x Freqüência
O inversor em análise é denominado “escalar”. Para que o torque se mantenha constante
diante de uma variação de carga no eixo do motor, a razão tensão pela freqüência de
alimentação também deve permanecer constante. Por exemplo: Imagine-se que um motor AC
está sendo acionado com 220 Vca em 60 Hz. Divide-se tensão pela freqüência (V/f), tem-se:
220/60 = 3,67. Esta, então, é a constante V/f.
Pois bem, suponha que ocorra uma redução de velocidade proporcional a 15 Hz. Para que não
haja variação no torque, a tensão deve ser reduzida na mesma proporção, afim de manter V /f
constante. Assim, a nova tensão será: V/15Hz =3,67
V = 55,5 Vca.
Pode parecer estranho ter que reduzir a tensão para manter constante o torque. Na figura 2.9
mostra-se um exemplo de curva V/f na qual pode-se observar que, na prática, há limites para
se manter o torque constante. No exemplo, o torque é constante apenas entre os pontos A e B.
Para freqüências menores que 5 Hz o motor nem gira, pois não há tensão suficiente para fazêlo. Já, para freqüências acima de 60 Hz, a tensão de alimentação nominal permanece
constante, mesmo se aumentar a freqüência.
Figura 2.9: Curva V/f
FONTE: ACIONAMENTOS..., 2007
22
Embora seja possível aumentar a velocidade do motor, seu torque sofrerá alterações segundo
a variação de carga.
Então, fora da região limitada pelos pontos A e B, o torque não pode ser considerado
constante. A função do inversor escalar é tentar manter a curva V/f o mais invariável possível.
Como a tensão no barramento DC é fixa, a única forma de aumentar ou reduzir a tensão de
alimentação do motor segundo uma variação na freqüência é através da técnica de PWM.
Quando é solicitado um aumento de velocidade (freqüência), a largura do pulso de saída é
aumentada, de forma a manter V/f
invariável. Já, quando reduz-se a freqüência, a largura do
pulso é reduzida, pela mesma razão.
2.3.5 - Como Instalar um Inversor de Freqüência
A única regra comum a todos os modelos e aplicações é tomar cuidado para não confundir os
bornes de entrada de energia (R, S, e T); com a saída para o motor (U, V, e W). Com exceção
desta regra, o restante da instalação depende do modelo e da aplicação. Para concretizar
melhor a idéia, tem-se na figura 2.10, o diagrama de ligação simples de um inversor da
WEG, modelo CFW 08.
23
Figura 2.10 - Diagrama de ligação
FONTE: Adaptado de ACIONAMENTOS..., 2007
2.3.6 - Parâmetros do Inversor de Freqüência
Segundo Capelli (2002, p.14) para que o inversor funcione a contento, não basta instalá-lo
corretamente, é preciso informá-lo em que condições de trabalho irá operar. Essa tarefa é
justamente a parametrização do inversor. Quanto maior o número de recursos que o inversor
oferece, tanto maior será o número de parâmetros disponíveis.
Um parâmetro do inversor de freqüência é um valor de leitura ou escrita, por meio do qual o
usuário pode ler ou programar valores que mostrem, sintonizem ou adéqüem o
comportamento do inversor e motor em uma determinada aplicação. Quase todos os
inversores disponíveis no mercado possuem parâmetros programáveis similares.
Estes parâmetros são acessíveis através de uma interface composta por um mostrador digital
e um teclado, chamado de Interface Homem-Máquina (IHM)
24
Para facilitar a descrição, os parâmetros serão agrupados pelas suas características:
•
Parâmetros de leitura
•
Parâmetros de configuração
•
Parâmetros de regulação
•
Parâmetros do motor
.
2.3.6.1 - Parâmetros de leitura
Segundo Mascheroni; Lichtblau e Gerardi (200?, p.62) os parâmetros de leitura, como seu
nome indica, permitem visualizar os valores programados nos parâmetros de regulação, de
configuração e do motor. Estes parâmetros não permitem a edição do valor programado;
somente a sua leitura. Como exemplos, têm-se:
P001 - Referência de Velocidade. Valor da referência de velocidade antes da rampa.
Indicação em rpm.
P002 - Velocidade do Motor. Indica o valor da velocidade real, em rpm.
P003 - Corrente do motor. Indica a corrente de saída do inversor em ampères.
P004 - Tensão do circuito intermediário. Indica a tensão atual no circuito intermediário de
corrente contínua, em Volts.
2.3.6.2 - Parâmetros de configuração
Definem as características do inversor, as funções a serem executadas. Como exemplos,
têm-se:
P202 – Tipo de controle. Define o modo de controle do inversor.
P205 – Seleção do parâmetro de leitura indicado. Seleciona qual parâmetro de leitura será
mostrado no display, após a energização do inversor.
25
2.3.6.3 - Parâmetros de regulação
São os valores ajustáveis a serem utilizados pelas funções do inversor. Como exemplos,
têm-se:
P100 - Tempo de aceleração. Define o tempo para acelerar linearmente de 0 até a freqüência
nominal.
P101 - Tempo de desaceleração. Define o tempo para desacelerar linearmente da freqüência
nominal até 0.
P133 - Referência mínima. Define o valor mínimo da freqüência na saída quando o inversor é
habilitado.
P134 – Referência máxima. Define o valor máximo da freqüência na saída quando o inversor
é habilitado.
2.3.6.4 - Parâmetros do Motor
São os dados do motor em uso: informações contidas nos dados de placa do motor. Como
exemplos, têm-se:
P399 – Rendimento nominal do motor.
P402 – Velocidade nominal do motor.
2.3.7 - Harmônicas aplicadas a inversores de freqüência
Todos os inversores de freqüência causam harmônicos devido à natureza do retificador de
entrada. Analisando o esquema apresentado na figura 2.11, verifica-se que o capacitor se
carrega inicialmente, drenando corrente e atingindo a tensão nominal. Após meio ciclo, os
capacitores no barramento CC ficam com o valor de pico da rede AC. Ao acionar o motor, ele
drena corrente deste barramento para suprir potência de acordo com a carga mecânica. Neste
26
momento o potencial no capacitor se reduz, fornecendo energia ao motor , antes de atingir o
valor mínimo permitido, o capacitor se recarrega no próximo meio ciclo da senóide, como
visto na figura 2.11. Este processo é repetido duas vezes em cada meio ciclo carregando e
descarregando o capacitor do barramento CC. Portanto, tem-se uma corrente distorcida a qual
pode-se associar uma tensão distorcida nos seus terminais, conforme mostrado na figura 2.12.
Figura 2.11- Curvas de carga e descarga do capacitor interno e circuito retificador
FONTE: HARMÔNICOS..., 2007
Figura 2.12 – Forma de onda da corrente de entrada de um retificador trifásico comparado
com a senóide correspondente
FONTE: HARMÔNICOS..., 2007
Pela curva apresentada na figura 2.12, percebe-se que o inversor de freqüência tem uma
corrente distorcida, muito distante da senóide ideal. Isto traz conseqüências prejudiciais, pois
provoca a distorção da tensão a depender da instalação elétrica que o alimenta.
27
2.3.8 - Vantagens
Não por acaso tem crescido significativamente o número de aplicações em que a variação de
velocidade de motores de indução é feita por meio de conversores eletrônicos estáticos de
freqüência, haja vista os muitos benefícios propiciados por essas aplicações:
•
Substituição de variadores mecânicos;
•
Substituição de variadores eletromagnéticos;
•
Automatização e flexibilização dos processos fabris;
•
Comunicação avançada e aquisição de dados;
•
Eliminação de elementos de partida pesada e complicada;
•
Instalação mais simples;
•
Aumento da vida útil do maquinário;
•
Evita choques mecânicos (trancos) na partida;
•
Redução do nível de ruído;
•
Excelente regulação de pressão e vazão;
•
Economia de energia;
•
Controle a distância;
•
Versatilidade.
2.3.9 - Especificação do inversor de freqüência
As especificações são importantes na escolha de qual inversor deve ser usado em uma
aplicação, considerando não apenas as funções e recursos existentes no produto, mas também
o custo-benefício do mesmo. A seguir, têm-se algumas especificações a serem consideradas
antes de comprar um inversor:
• Potência e tensão do motor;
• Tipo de máquina (ventilador, bomba, esteira, elevador );
• Ciclo de trabalho da máquina (tempo para partir, rodar e parar);
28
• Quantidade de operações por hora;
• Tempo de aceleração e desaceleração;
• Inércia da máquina;
• Velocidade mínima e máxima;
• Comando de 2 fios ou 3 fios;
• Tipo de parada (inércia, rampa, frenagem CC);
• Temperatura ambiente;
• Comunicação serial (ethernet, DF1, RS485);
• Ruído eletromagnético;
• Instalação elétrica - Aterramento e blindagem de cabos;
• Montagem em painel existente ou novo;
• Proteção elétrica (fusível, disjuntor).
2.4 - Medidores de Temperatura
Temperatura é a medida do efeito causado pela aplicação de calor sobre um corpo. Sua
quantificação é muito difícil devido à fácil influência de fatores externos aos dispositivos de
medida, além do fator tempo ser tomado em consideração porque sempre há um atraso na
resposta.
Os instrumentos de medida de temperatura podem ser divididos em duas classes. A primeira
classe compreende os instrumentos em que o elemento sensível está em contato com o corpo
cuja temperatura se quer medir. São eles: termômetros à dilatação de sólido, termômetros à
par termo elétrico, termômetros à resistência elétrica, termômetros à dilatação de líquido,
termômetros à dilatação de gás, termômetros à tensão de vapor saturante. A segunda classe
compreende os instrumentos em que o elemento sensível não está em contato com o corpo
cuja temperatura será medida. São eles: pirômetros à radiação total, pirômetros à radiação
parcial.
29
O uso de um determinado medidor de temperatura depende em cada caso de fatores técnicos e
econômicos. Como fator técnico, pode-se citar faixa de medição, tempo de respostas, precisão
e robustez.
2.4.1 – Termopar
De acordo com Moreira (2002) os termopares são os sensores de temperatura preferidos nas
aplicações industriais, seja pela sua robustez, seja pela simplicidade de operação.
Um termopar consiste de dois condutores metálicos, de natureza distinta, na forma de metais
puros ou de ligas homogêneas. Os fios são soldados em um extremo ao qual se dá o nome de
junta quente ou junta de medida. A outra extremidade dos fios é levada ao instrumento de
medição de tensão. O circuito de um termopar é ilustrado na figura 2.13.
Figura 2.13: Circuito de um termopar
FONTE: SENSORES..., 2008
Ele se baseia no princípio descoberto por Seebeck de que qualquer diferença de temperatura
entre as junções de dois metais diferentes gera uma diferença de potencial, isto é, tensão, entre
essas junções.
30
2.4.1.1 - Efeito Seebeck
A experiência de Seebeck, figura 2.14, demonstrou que num circuito, formado por dois fios
de metais diferentes, colocando-se os dois pontos de junção à temperaturas diferentes, cria-se
uma corrente elétrica cuja intensidade é determinada pela natureza dos dois metais utilizados
e da diferença de temperatura entre as junções.
Figura 2.14 : Circuito da experiência de Seebeck
FONTE: MEDIÇÃO ..., 2008
2.4.1.2 -Efeito Peltier
É praticamente um complemento em relação ao efeito Seebeck. Conforme Bega e Delmee
(2006, p.223) “em um circuito contendo duas junções, inicialmente à mesma temperatura, é
percorrido por uma corrente, em decorrência da conexão de uma fonte externa, ocorre o
aquecimento de uma junção e o resfriamento da outra [...]” (BEGA; DELMEE, 2006, p.223),
o que corresponde ao esquema mostrado na figura 2.15.
Figura 2.15: O efeito Peltier
FONTE: TERMOPARES..., 2008
31
2.4.1.3 - Efeito Thomson
Ao longo dos fios de um termopar, na ausência de corrente, a condução do calor causa um
gradiente uniforme de temperatura. “Thonsom deduziu que, ao circular corrente pelo
termopar, a temperatura em diferentes pontos assume valores não justificáveis pelo efeito
Joule [...]” (BEGA; DELMEE, 2006, p.223).
2.4.2 - Leis de Utilização dos Termopares
/
As leis descritas a seguir regem o funcionamento dos termopares.
2.4.2.1 - Dois metais, duas junções
Um circuito utilizando termopares deve conter pelo menos: dois materiais distintos e duas
junções, como se pode ver na figura 2.16.
Figura 2.16 – Esquema simples de um termopar
FONTE: SILVA, 2008
32
2.4.2.2 - Independência da temperatura do percurso
A tensão de saída do termopar depende apenas das temperaturas das junções, e é independente
da forma como a temperatura se distribui pelos condutores, desde que nestes não haja corrente
elétrica, figura 2.17.
Figura 2.17 – Tensão independente da temperatura do percurso
FONTE: SILVA, 2008
2.4.2.3 - Metais intermediários nas ligações
Se um terceiro material homogêneo for inserido no condutor A ou no condutor B de um
circuito com termopares, a tensão de saída permanece inalterada, desde que as novas junções
estejam à mesma temperatura (T2 = T1), como percebe-se na figura 2.18.
Figura 2.18 – Presença de metal intermediário na ligação
FONTE: SILVA, 2008
33
2.4.2.4 - Metais intermediários nas junções
A colocação de um material intermediário numa junção (medida ou referência), figura 2.19,
não afeta a tensão de saída desde que as novas junções assim criadas sejam mantidas à mesma
temperatura.
Figura 2.19 – Presença de material intermediário em uma das junções
FONTE: SILVA, 2008
2.4.2.5 - Lei das temperaturas sucessivas
Se um circuito de termopares com temperaturas T1 e T2 origina-se a tensão de saída
u1,2 = f(T1,T2), e exposto a T2 e T3 produz uma tensão u2,3=f(T2,T3), o mesmo circuito às
temperaturas T1 e T3 originará uma tensão de saída u1,3 = f(T1,T3) = u1,2+ u2,3, vide figura 2.20.
Figura 2.20 – Lei das temperaturas sucessivas
FONTE: SILVA, 2008
34
2.4.2.6 - Lei dos metais sucessivos
Um termopar constituído pelos materiais A e C e com as junções expostas às temperaturas T1
e T2 gera uma tensão uA,C. Um circuito semelhante construído de materiais C e B gera, às
mesmas temperaturas, uC,B. Um terceiro termopar, semelhante na configuração, e fabricado
com os materiais A e B, dará, às mesmas temperaturas uA,B = uA,C + uC,B. Na figura 2.21 temse de forma esquemática a situação.
Figura 2. 21- Lei dos metais sucessivos
FONTE: SILVA, 2008
2.4.3 - Tipos de termopares
Os termopares podem ser divididos em três categorias: termopares nobres (R, S, B),
termopares básicos (K, J, N, E, T) e termopares especiais. Na prática os termopares nobres
possuem platina, enquanto os básicos possuem níquel. Na tabela 2.1 apresenta-se os tipos e
características dos termopares.
Tabela 2.1: Limite de erro e faixa de uso, com junção de referencia a 0 ºC
Tipo de
Faixa de
Termopar Temperatura
T
0 a 370ºC
J
0 a 760ºC
E
0 a 870ºC
K
0 a 1260ºC
SeR
0 a 1480ºC
B
870 a 1700ºC
T
-200 a 0ºC
E
-200 a 0ºC
-200 a 0ºC
K
FONTE: MOREIRA, 2007
Limites de Erro
Standard
Especial
±1ºC ou ±0,75%
±0,5ºC ou 0,4%
±2,2ºC ou ±0,75%
±1,1ºC ou ±0,4%
±1,7ºC ou ±0,5%
±1ºC ou ±0,4%
±2,2ºC ou ±0,75%
±1,1ºC ou ±0,4%
±1,5ºC ou ±0,25%
±0,6ºC ou ±0,1%
±0,5%
± 0,25%
±1ºC ou ±1,5%
±1,7ºC ou ±1%
±2,2ºC ou ±2%
-
35
As aplicações para os termopares são as mais variadas possíveis, sendo de suma importância o
ambiente no qual estará inserido. Para a medição de temperaturas acima de 500 °C, eles são a
única escolha quando se fala em termômetros de contato. Na tabela 2.2 ilustra-se algumas
recomendações sobre as condições ambientais de operação.
Tabela 2.2 – Aplicação para os termopares
Ambiente
B
Oxidante, inerte,
vácuo por períodos
curtos.
Oxidante, inerte.
Mais adequado para alta temperatura. Possui
tensão baixa à temperatura ambiente.
1700
Bom para temperatura abaixo de zero.
870
O ferro oxida rapidamente.
760
K
Oxidante, inerte,
redutor em vácuo.
.parcial
Oxidante, inerte.
Sujeito à “green rot” em algumas atmosferas.
1260
N
Oxidante, inerte.
Mais estável que o tipo K, em altas temperaturas.
1260
Re
S
T
Oxidante, inerte.
Evitar contato com metal.
1400
Temperaturas abaixo de zero. Tolera umidade.
370
E
J
Oxidante, inerte,
redutor em vácuo.
FONTE:parcial
MOREIRA, 2007
Observação
Temperatura
máxima (°C)
Tipo
2.4.4 - Tensão x Temperatura
Como a força tensão gerada em um termopar depende da composição química dos condutores
e da diferença de temperatura entre as juntas, isto é, a cada grau de variação de temperatura,
pode-se observar uma variação da tensão gerada pelo termopar, então, pode-se construir uma
tabela de correlação entre a temperatura e a força eletromotriz. Para a construção do gráfico,
figura 2.22, considerou-se a junta de referência com a temperatura de 0°C.
36
Figura 2.22: Relação entre tensão e temperatura
FONTE: SENSORES..., 2008
Para encontrar o valor da temperatura T, pode-se converter a tensão uo diretamente por meio
dos coeficientes polinomiais. A seguir, tem-se a relação entre eles e os coeficientes para
alguns tipos de termopares (Tabela 2.3).
T= a0 +a1uo +a2uo2+a3uo3+ a4uo4+…(u0 / V, T/ ºC)
Tabela 2.3 – Valores dos coeficientes polinomiais
FONTE: SILVA, 2008
(2.25)
37
2.5 - Anemômetro
Segundo Dannemann (2008) os anemômetros são instrumentos que servem para indicar a
direção e medir a velocidade dos ventos. Inspirados nos cata-ventos, eles são calibrados de
forma a que o total de voltas dadas por suas pás corresponda a uma velocidade específica, ou
seja, se no túnel de vento em que são ajustados a corrente de ar sopra a dez quilômetros por
hora, e as pás do instrumento giram cem vezes por minuto, ele é programado para indicar 10
km/h sempre que o anemômetro atingir cem rotações por minuto.
Em geral há dois tipos de anemômetros, o de conchas e de hélice. O anemômetro de conchas
como mostrado na figura 2.23, é do tipo rotativo mais simples em que há três ou mais conchas
de formato especial montadas simetricamente formando ângulos retos com um eixo vertical.
A velocidade de rotação depende da velocidade do vento, independentemente da direção de
onde ele sopra. O conjunto das conchas faz mover um mecanismo que conta as rotações e a
velocidade do vento é calculada com o auxílio de um dispositivo de contagem. Os
anemômetros de hélice são também do tipo rotativo. Um cata-vento mantém voltado para o
vento uma hélice, cuja rotação é transmitida a um indicador.
Figura 2.23 – Anemômetro de conchas
FONTE: DANNEMANN, 2008
38
CAPÍTULO III
III. METODOGIA ADOTADA
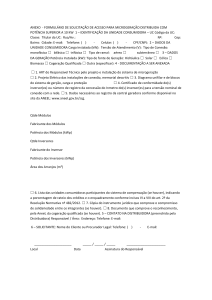
3.1 Base experimental
Para realização do experimento foi utilizado um molde onde foi fundido o naftaleno. Este
molde é de alumínio, possui base quadrada com 8 cm de lado e apresenta uma inclinação α
em relação ao plano da base, em três dos seus lados. O quarto lado faz 90° com o plano da
base. Esta inclinação faz com que o molde tenha sua espessura variada. No interior do molde
as faces sofrem ranhuras, conforme apresentada na figura 3.1, com a finalidade de fixar
melhor o naftaleno após sua solidificação. O molde tem dois furos, do lado oposto à base, um
para o vazamento do naftaleno líquido e o outro que servirá como “suspiro” para evitar a
formação de bolhas no interior da placa fundida de naftaleno, de acordo com a figura 3.2. As
bordas do molde são bem finas, 0,24 cm, a menor dimensão conseguida.
A placa deve ser feita de maneira que seus ângulos sejam grandes suficientes que permitam na
moldagem do naftaleno e que o mesmo ocupe todos os espaços, evitando buracos em sua
superfície, visto que isto pode afetar o experimento. Na moldagem do naftaleno a superfície
que fica exposta, entra em contato com uma placa altamente polida garantindo uma
superfície de naftaleno bem lisa. Após a completa solidificação do naftaleno dentro do molde,
coloca-se sobre a face de ataque um teflon protetor e efetua-se uma pesagem do conjunto.
Posteriormente fixa-se o conjunto dentro do túnel de vento. A face de ataque do naftaleno tem
uma inclinação β em relação ao plano de fluxo de ar. O experimento consiste na determinação
dos coeficientes de transferência da calor por convecção para variações de β, figura 3.3.
39
Figura 3.1– Cavidade interna do molde
Figura 3.2 – Molde sobre a placa polida
Dois termopares (um no molde, enterrado no naftaleno abaixo da superfície exposta e um no
túnel de vento), são utilizados para avaliar quando o sistema entra em equilíbrio térmico,
condição necessária para o sucesso da operação.
40
Figura 3.3 – Direção de ataque do fluxo de ar
Para controlar o fluxo de ar no túnel de vento, utiliza-se um motor de indução como um
exaustor, puxando o ar para dentro do túnel de vento, sendo controlado pelo inversor de
freqüência. Assim, o inversor de freqüência tem a função de controlar a rotação do motor e
conseqüentemente o fluxo de ar dentro do túnel de vento. Esse fluxo de ar incide sobre a placa
de naftaleno conforme visto nas figuras 3.3 e 3.4.
Iniciado o experimento, espera-se o sistema entrar em equilíbrio térmico. O teflon protetor
garante que nenhuma partícula de naftaleno seja retirada antes que o sistema entre em
equilíbrio térmico. Estabelecido o equilíbrio retira-se a proteção e deixa-se o conjunto sob a
ação do fluxo de ar por um tempo de sessenta (60) minutos. Depois de percorrido o tempo
estimado o fluxo é interrompido. Coloca-se o teflon protetor e faz-se a pesagem,
determinando assim a massa sublimada.
41
Figura 3.4 – Seção transversal do túnel de vento mostrando placa
3.2 – Determinação do fator j
A analogia entre transferência convectiva de calor e a transferência de massa é usada para
relacionar os dois coeficientes de convecção, utilizando o controle do fluxo de ar. Dados de
transferência de massa são adotados para exprimir a transferência convectiva de calor na
mesma geometria, pelas simples substituição de Nu por Sh e de Pr por Sc. O procedimento
para a obtenção de dados ocorre da seguinte forma: utilizando-se de um molde apoiado numa
placa plana, funde-se naftaleno no seu interior ficando uma superfície exposta. Este conjunto
é pesado e então levado e fixado no interior do túnel de vento. A transferência convectiva de
massa ocorrerá em função da diferença na concentração do vapor de naftaleno na superfície
da placa e na corrente livre.
A superfície de naftaleno fica exposta a corrente de ar durante um determinado intervalo de
tempo. Após este tempo o conjunto é pesado registrando uma diminuição na sua massa. O
coeficiente de transferência de massa pode ser dado pela expressão:
(2.2)
42
onde
representa o fluxo de massa [kg/s]; A representa a superfície de troca, [m2] ; ρ
representa a concentração do componente que está sendo transferido, [kg/m3] e hD é o
coeficiente de transferência de massa.
A pressão parcial do vapor é muito pequena comparada a pressão atmosférica total, e desse
modo é assumido que o vapor comporta-se como gás perfeito . É assumido também que o
vapor na superfície é saturado na temperatura da superfície Ts. Portanto,
(3.1)
onde pv,s (N/m) e Ts (°C) são propriedades dependentes, M (kg/kmol) é o peso molecular e
(J/kmol.K) é a constante universal dos gases. A quantidade de naftaleno sublimada durante a
experimento, ∆m, será determinada, pela diferença de medidas antes e depois do experimento
do mesmo. Então, se ∆t denota o tempo de duração de um experimento, o fluxo de massa é
determinado por:
(3.2)
A massa de naftaleno transferida, é função da diferença nas concentrações do vapor de
naftaleno na superfície da placa e na corrente livre. O coeficiente de transferência de massa é
definida pela equação (2.2). Neste trabalho, ρv,∞ é considerado nulo. Para determinar ρv,s é
necessário primeiramente conhecer a pressão de vapor ρv,s correspondente a temperatura
medida na superfície. O valor da pressão de vapor é avaliada pela equação seguinte:
(3.3)
Então, com as equações (2.2), (3,7) e (3.8); o coeficiente hD é calculado.
43
Para o cálculo do fator j, deve-se primeiramente determinar o número de Schmidt por meio da
equação:
(3.4)
sendo D é o coeficiente de difusão de massa do naftaleno no ar, (m2/s), coeficiente este obtido
de tabelas;
é o valor da viscosidade cinemática, (m2/s), encontrado também em tabelas.
Com o intuito de encontrar o fator j, utiliza-se a expressão:
(3.5)
O número de Reynolds:
(3.6)
onde
representa a velocidade da corrente livre e x é a dimensão da placa paralela ao
escoamento.
Na execução do experimento devem ser observados alguns cuidados:
e T∞ não devem
variar durante o experimento; a duração da corrida deve ser tal que a massa evaporada possa
ser precisamente medida; a superfície de naftaleno exposta à corrente de ar deve ser bem lisa
e que não haja perdas de massa apreciáveis durante a pesagem.
Neste trabalho faz-se o controle de velocidade no túnel de vento com objetivo de avaliar o
coeficiente convectivo de calor. Utiliza-se a analogia entre transferência de calor e
transferência de massa, aplicando-se o processo de transferência de massa por meio da
sublimação do naftaleno.
44
CAPÍTULO IV
IV. RESULTADOS
4.1 Parâmetros utilizados
A cada experimento fez-se necessário ajustar os parâmetros do inversor de freqüência,
modelo CFW - 08, para que haja sintonia no comportamento do motor de indução e do
inversor de freqüência. Durante o experimento, fez-se a leitura de alguns parâmetros,
detalhados a seguir:
P000
Parâmetro de acesso. Como os parâmetros vêm pré-ajustados de fábrica e deseja-se
fazer modificações neles, torna-se necessário configurá-lo para liberar o acesso para
alteração do conteúdo dos outros parâmetros.
P202
Tipo de controle. Ajustado para trabalhar com controle linear.
P133
Freqüência mínima. Após habilitado o inversor, esse parâmetro define a menor
freqüência que poderá ser configurada. O valor mínimo foi Fmin = 40Hz.
P134
Freqüência máxima. Após habilitado o inversor, esse parâmetro define a maior
freqüência que poderá ser configurada. O valor máximo foi Fmax = 80Hz
P100
Tempo de aceleração. Define o tempo para acelerar o motor de 0 até a freqüência
nominal. Foi escolhido o tempo de 0,5s.
P101
Tempo de desaceleração. Define o tempo para desacelerar o motor da freqüência
nominal até 0. Foi escolhido o tempo de 2s.
P205
Seleção do parâmetro de leitura indicado. Define qual parâmetro de leitura será
mostrado no display após a energização do inversor. Foi utilizado o parâmetro de
leitura de tensão de saída do motor (P007).
45
P005
Freqüência de saída do motor. Configura o valor de freqüência da saída do inversor.
Neste trabalho, foi utilizado as seguintes freqüências: 40Hz, 50Hz, 60Hz, 70Hz e
80Hz.
P004
Apresenta o valor da tensão do circuito intermediário.
P007
Apresenta a tensão de saída do motor.
Utiliza-se o termopar tipo k.
T= a0 +a1uo +a2uo2+a3uo3+ a4uo4+…(u0 / V, T/ ºC)
a0 =
a1 =
a2 =
a3 =
a4 =
a5 =
a6 =
a7 =
a8 =
0,226584602
24152,109
67233,4248
22110340,68
-860963914,9
48350600000
-1,18452E+12
1,3869E+13
-6,33708E+13
(4.1)
O valor da tensão encontrado no multímetro durante o experimento foi u0 = 0,0008 V, que
resulta num valor de temperatura (Eq.(4.1)) de T = 19,61 ºC.
Com a ajuda do anemômetro, mediu-se a velocidade no túnel de vento. Para cada freqüência
utilizada, tem se um valor respectivo para a velocidade conforme descrito na tabela 4.1:
Tabela 4.1: Valores de freqüência e velocidade
F
25 Hz
30 Hz
40 Hz
50 Hz
60 Hz
70 Hz
80 Hz
u∞
3,8 m/s
5,3 m/s
7,9 m/s
10,1 m/s
12 m/s
15,2 m/s
17,1 m/s
46
4.2 - Resultados obtidos
Para cada valor da freqüência, foi encontrado um valor correspondente à velocidade,
conforme visto anteriormente. A massa sublimada foi tomada como a média dos valores
obtidos nas rodadas realizadas (duas rodadas em cada caso).
Conforme especificado na metodologia deste trabalho, o valor da temperatura na superfície
Ts, permaneceu constante e, conseqüentemente a pressão de vapor Pv,s e a concentração de
vapor de naftaleno na superfície da placa ρv,s também foram os mesmos, conforme mostrado
nas tabelas 4.2 e 4.3.
Para encontrar o valor do número de Schmidt (Sc), deve-se procurar em uma tabela específica
de acordo com a temperatura correspondente Ts. Isso também se aplica ao valor da
viscosidade cinemática (σ). O número de Reynolds sofre variação apenas por causa da
velocidade da corrente livre, pois os outros dados que podiam modificar o resultado
permanecem constantes.
47
Tabela 4.2 – Valores dos parâmetros encontrados para o ângulo 0°
Pv,s
Cv,s
µ∞
ReL
L
σ
25 Hz 292,61
6,58668
0,000347
3,8
19778,79
0,08
1,54E-05
30 Hz 292,61
6,58668
0,000347
5,3
27586,21
0,08
40 Hz 292,61
6,58668
0,000347
7,9
41119,06
50 Hz 292,61
6,58668
0,000347
10,1
60 Hz 292,61
6,58668
0,000347
70 Hz 292,61
6,58668
80 Hz 292,61
6,58668
F
Ts
∆m
A
hD
j
5,21E-06
0,00012
0,0064
0,015011
0,007268
1,54E-05
5,86E-06
0,000135
0,0064
0,016887
0,005863
0,08
1,54E-05
7,38E-06
0,00017
0,0064
0,021265
0,004953
52569,94
0,08
1,54E-05
8,03E-06
0,000185
0,0064
0,023142
0,004216
12
62459,34
0,08
1,54E-05
8,68E-06
0,0002
0,0064
0,025018
0,003836
0,000347
15,2
79115,16
0,08
1,54E-05
9,77E-06
0,000225
0,0064
0,028145
0,003407
0,000347
17,1
89004,55
0,08
1,54E-05
1,04E-05
0,00024
0,0064
0,030022
0,00323
48
Tabela 4.3 – Valores dos parâmetros encontrados para o ângulo 25°
Pv,s
Cv,s
µ∞
ReL
25 Hz 292,61
6,58668
0,000347
3,8
19778,79
0,08 1,54E-05
30 Hz 292,61
6,58668
0,000347
5,3
27586,21
40 Hz 292,61
6,58668
0,000347
7,9
50 Hz 292,61
6,58668
0,000347
60 Hz 292,61
6,58668
70 Hz 292,61
80 Hz 292,61
F
Ts
L
σ
∆m
A
hD
j
6,94E-06
0,00016
0,0064
0,020014
0,009691
0,08 1,54E-05
8,03E-06
0,000185
0,0064
0,023142
0,008034
41119,06
0,08 1,54E-05
9,11E-06
0,00021
0,0064
0,026269
0,006118
10,1
52569,94
0,08 1,54E-05
9,98E-06
0,00023
0,0064
0,028771
0,005241
0,000347
12
62459,34
0,08 1,54E-05
1,06E-05
0,000245
0,0064
0,030647
0,004699
6,58668
0,000347
15,2
79115,16
0,08 1,54E-05
1,19E-05
0,000275
0,0064
0,0344
0,004164
6,58668
0,000347
17,1
89004,55
0,08 1,54E-05
1,3E-05
0,0003
0,0064
0,037527
0,004038
49
4.3 Discussões dos resultados
Com o objetivo de apresentar resultados práticos tanto a transferência de calor quanto a
transferência de massa, os fatores j para ambos os tipos de transferência foram utilizados.
Estes fatores foram encontrados pelas seguintes fórmulas.
(4.2)
(4.3)
De acordo com a analogia entre transferência de calor e massa, os fatores j para os dois
modos são iguais.
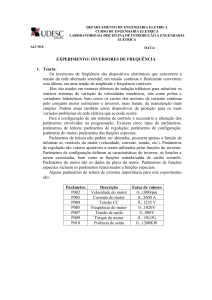
Resultados experimentais têm mostrado que os fatores j são usualmente correlacionados na
forma j = C.Re-n, onde n > 0. Conhecido o fator j para transferência de massa e o número de
Reynolds do experimento, plota-se os dois fatores e pode-se determinar os coeficientes da
relação.
Sparrow e Tien (1977) apresentam, considerando qualquer ângulo de inclinação da placa
plana, a seguinte relação:
j = 0,931 Re −1 / 2
(4.4)
Como há apenas variação no numero de Reynolds nesse trabalho, e ainda admite-se que os
experimentos ocorreram a temperaturas constantes, os números adimensionais de Schmidt e
Prandtl permanecem constantes.
O numero de Reynolds variou na faixa de 20000 a 90000. Os experimentos foram feitos
considerando os ângulos de ataque de 0° e 25°. Nas figuras 4.1 e 4.2 mostra-se o gráfico de j
50
versus Reynolds, considerando a placa na posição horizontal e a placa com um ângulo de 25°
em relação ao escoamento.
Figura 4.1 Variação do fator j com o número de Reynolds, ângulo de ataque de 0°
Figura 4.2 Variação do fator j com o número de Reynolds, ângulo de ataque de 25°
51
Observa-se pelos resultados obtidos, mostrados nas figuras 4.1 e 4.2, que os valores encontrados
foram bastante satisfatórios, principalmente para a posição horizontal, quando comparados aos
resultados encontrados por Sparrow e Tien (1977). No caso da placa com ângulo de 25° houve uma
maior diferença. As causas para essa diferença podem estar relacionadas à ocorrência de arraste de
partículas durante o experimento, o não paralelismo entre a corrente de ar e a superfície e também há
erros processo de pesagem da massa sublimada.
52
CAPÍTULO V
V. CONSIDERAÇÕES FINAIS
Durante o trabalho foi observado que a massa do naftaleno sublimada ficava acima do valor
encontrado na literatura. Este problema pode estar associado à ocorrência de um arraste de
partículas durante o experimento, em função do processo de moldagem do naftaleno. Outro
ponto a ser questionado refere-se a temperatura, pois apesar de considerá-la como constante,
houve variações na temperatura que não foram registradas pelo termopar, variações pequenas,
mas que influem no resultado final. Uma outra dificuldade foi obtenção de um paralelismo do
escoamento, no caso da superfície horizontal, e também na posição de 25°.
O método aplicado na variação da velocidade do fluxo de ar, utilizando-se o inversor de
freqüência, proporciona diminuição de ruídos, conservação de energia, redução no custo de
manutenção do motor.
53
CAPÍTULO VI
VI. REFERÊNCIAS BIBLIOGRÁFICAS
ACIONAMENTOS Elétricos: Inversores de Freqüência e Softstarter. 2007. Disponível em
www.4shared.com. Acesso em 09 janeiro 2008.
BEGA, E. A.; DELMÉE, G. J. Instrumentação Industrial. 2ª Edição. Rio de Janeiro:
Editora Interciência, 2006.
CAPELLI, Alexandre. Inversores de Freqüência. Mecatrônica Atual, São Paulo: Editora
Saber, ano 01, nº 02, p. 7 – 15, fevereiro 2002.
CASTRO, Gleston. Inversor de Freqüência- Conceitos e Técnicas de Aplicação.
Disponível em: < http://www.4shared.com>. Acesso em 15 novembro 2007.
DANNEMANN,
Fernando
Kitzinger.
Anemômetro.
Disponível
em
<
http://recantodasletras.uol.com.br/artigos/943880>. Acesso em 20 maio 2008.
HARMÔNICOS e Inversores de Freqüência. Disponível em < http://www.4shared.com>.
Acesso em 18 maio 2008.
INCROPERA, F. P.; DEWITT P. D. Fundamentos de Transferência de Calor e de Massa.
5ª Edição. Rio de Janeiro: Editora LTC , 2003.
MAGALDI, Miguel. Noções de Eletrotécnica. 5ª Edição. Rio de Janeiro: Editora Guanabara
Dois S.A., 1981.
MASCHERONI, J. M.; LICHTBLAU, M.; GERARDI, D. Guia de Aplicação de Inversores
de Freqüência. 2ª Edição.200?
54
MEDIÇÃO de Temperatura. Disponível em < http://www.4shared.com>. Acesso em 06
janeiro 2008.
MOREIRA, Lúcia. Medição de Temperatura Usando-se Termopar. 2007. Disponível em <
www.ceramicaindustrial.org.br/pdf/v07n05/v7n5_6.pdf>. Acesso em 29 novembro 2007.
MOTORES
Elétricos
de
Indução.
Disponível
em
<
http://labinfo.cefetrs.edu.br/professores/durval/maq1/el%E9trica/cap10%20(motores%20eletri
cos%20de%20inducao).pdf>. Acesso em 23 dezembro 2007
PIRES, W. L.; Motores de indução alimentados por conversores de freqüência PWM.
2006. Disponível em < http://www.4shared.com >. Acesso em 15 abril 2008
SILVA,
Gustavo
Monteiro.
Termopares.
Disponível
em
<http://ltodi.est.ips.pt/gsilva/instrumentacao2/a_teoricas/1a-Termopares.pdf>. Acesso em 06
março 2008.
TERMOPARES – Dispositivos Utilizados para Medir Temperatura. Disponível em <
http://www.4shared.com>. Acesso 11 junho 2008.
SENSORES de temperatura. Disponível em < http://www.4shared.com>. Acesso em 18
novembro 2007.