Departamento de Engenharia Mecânica
DESENVOLVIMENTO DE SIMULADORES DE MOVIMENTO PARA
ANÁLISE E VISUALIZAÇÃO DA DINÂMICA DE VEÍCULOS.
INTEGRAÇÃO DOS SUBSISTEMAS
Aluna: Ingrid Obeid
Orientador: Mauro Speranza Neto
Introdução
O projeto baseia-se no desenvolvimento de um simulador de movimento com seis
graus de liberdade (x, y, z, roll, pitch e yaw). Este projeto surgiu em 2010 com o intuito de
motivar mais alunos para a habilitação em Engenharia de Controle e Automação, mas que por
sua vez possui grande interseção com a Engenharia Mecânica. O simulador, apesar de não
incluir todos os movimentos de um veículo real, emprega os mesmos conceitos básicos e
dispositivos dos equivalentes com os 6 graus de liberdade.
Objetivos
O objetivo do projeto é desenvolver um simulador em escala a partir do simulador
feito em escala real projetado anteriormente. O simulador em escala real possui integração
dos componentes eletromecânicos e/ou pneumático-mecânicos para que assim possa ser feito
testes e demonstrações no Laboratório de Controle e Automação, já o simulador em escala
que está em construção possui apenas servos e trilhos podendo assim ser executado testes
mais aprofundados, levando em conta que este possui mais três graus de liberdade. Os
simuladores são sistemas mecatrônicos que produzem as principais atitudes e movimentos de
um veículo, comandado pelos mesmos elementos do sistema real. A estrutura do simulador
em questão será acionada por atuadores elétricos e controladas eletronicamente através de
servossistemas, sobre as quais são montadas as bases que simulam os graus de liberdade.
Estes mecanismos, são capazes de reproduzir os ângulos de atitude – rolagem, arfagem e
guinada (respectivamente roll, pitch e yaw) e os movimentos dos eixos x, y e Z, logicamente,
com limitações, porém com amplitude suficiente de modo a possibilitar as principais
características do veículo real em condições normais de operação, e até em algumas situações
consideradas de risco, como a perda de sustentação em aeronaves, ou o início da capotagem
em veículos terrestres.
Metodologia
Inicialmente foram estudados simuladores já desenvolvidos. Foram analisados
diversos tipos de sistemas para a movimentação do simulador, como por exemplo atuadores,
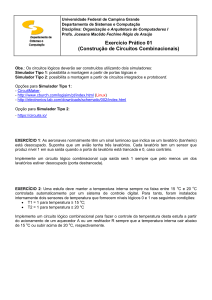
motores. Após esse processo foi desenvolvida uma concepção inicial, bem rustica, feita em
madeira somente para testar a estrutura e os graus de liberdade em questão. Após esse
protótipo pronto foi modelado em SolidWorks uma versão melhorada em acrílico, que além
disso simulou a estrutura em diversas situações, mostrando sua capacidade de movimentação.
Com isso adotou-se o sistema de controle a partir de servos.
Departamento de Engenharia Mecânica
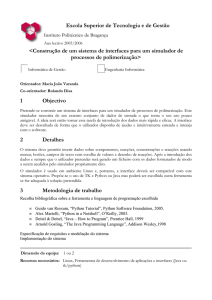
Após, a modelagem feita este foi cortado a laser no próprio laboratório da faculdade, para
que assim se torne mais eficiente e didático o projeto. Sua estrutura é composta praticamente de
alumínio e algumas partes de outros metais, para que a junção das partes do projeto seja feita com
maior segurança.
O novo simulador em escala além de apresentar 6 graus de liberdade, três a mais do
desenvolvido anteriormente foi todo projetado, elaborado, cortado e montado no laboratório de
controle e automação da PUC – rio, podendo –se assim ter aceso a todos os processos de
elaboração do novo simulador.
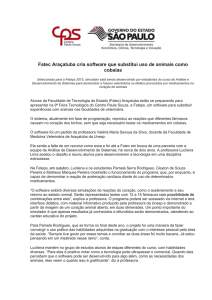
Figura 1 – simulador de madeira em escala.
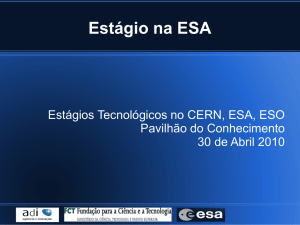
Figura 2 – Simulador de alumínio em escala.
Conclusões
Com todas as estruturas cortadas percebeu-se alguns erros nas peças, como: furos
desalinhados, furos não completados dentre outros, com isso, alguns cortes serão refeitos. Após o
novo corte o simulador será montado e testado junto com seu sistema de atuação de controle que
está sendo desenvolvido paralelamente ao projeto.