JDSS-LAC/INPE
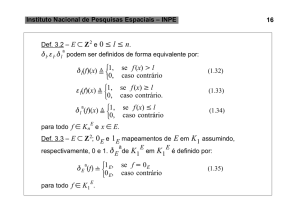
Adaptive Linear Element - Adaline/Madaline
•Concebido por Widrow e Hoff (1960)
•Máquina adaptável para classificação de padrões
•Usa o algoritmo LMS para sua operação.
JDSS-LAC/INPE
Adaptive Linear Element - Adaline/Madaline
w0
x1
w1
x2
w2
Entradas
x0= -1
¦
.
.
.
xp
wp
v
y
Função
Sinal
-
e
d v
¦
+
d
Objetivo do processo na Adaline:
Dado um conjunto de padrões e de saídas desejadas, encontrar
o conjunto de pesos ótimos wi que minimiza o valor quadrático
médio do erro.
1
JDSS-LAC/INPE
LMS - Regra Delta - Regra de Aprendizagem de Widrow-Hoff
(Lin e Lee, 1996)
Dado: ^( x (1), d (1)), ( x ( 2), d ( 2)),/ , ( x ( p ), d ( p ))`
Função Custo:
H ( n)
Linearmente
separáveis
p
·
1§
¨ d ( n) ¦ w j (n) x j (n) ¸
¸
2 ¨©
j 0
¹
w j (n 1)
2
w j ( n ) 'w j ( n )
JDSS-LAC/INPE
LMS - Regra Delta - Regra de Aprendizagem de Widrow-Hoff
(Lin e Lee, 1996)
Gradiente Descendente
w j (n 1)
'w j ( n )
w j ( n ) 'w j ( n )
'w j (n)
K
wH (n)
ww j (n)
p
·
§
K ¨¨ d ( n ) ¦ w j ( n ) x j ( n ) ¸¸ x j ( n ) j 0
¹
©
p
§
·
¨
K ¨ d ( n ) ¦ w j ( n ) x j ( n ) ¸¸ x j ( n )
j 0
©
¹
2
JDSS-LAC/INPE
Exemplo 1:
Padrões
Pesos e Limiar iniciais
ª 1 1º
« 1 1»
«
»
«¬ 1 1»¼
P
d
> 1
1@
Parâmetros
K 0.2
ª0.7266º
«0.8353»
«
»
«¬0.0972»¼
w
0.3662
b
S oma dos e rros qua drá ticos
0.2
Erro _ alvo 0.01
Max _ epoca 200
0.18
0.16
0.14
0.12
JDSS-LAC/INPE
Fonte de
Informação
Erro
Pesos Finais
ª0.6415º
w ««0.9860»»
«¬0.1823»¼
b 0.4513
0.1
0.08
0.06
0.04
0.02
0
1
1.5
2.5
3
Cancelamento de Ruído (Filtro Adaptativo)
Sinal de
Informação
+
+
Sinal de
Interferência
filtrado
Filtro
Interferência
p
Sinal de
Informação
Restaurado
Sinal de Informação
Contaminado +
x
Fonte de
Interferência
2
e poca s
w1
¦
Sinal
de Erro
y
w0
-1
Entrada
da Adaline
Saída da
Adaline
Adaptado de Hagan et ali., 1996
Capítulo 10, pp. 10-15
3
JDSS-LAC/INPE
JDSS-LAC/INPE
4
JDSS-LAC/INPE
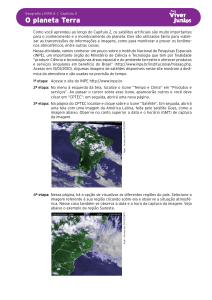
Madaline
W1
Camada
de entrada
x1
1
x2
2
x3
3
W2
Camada
de Saída
y1
y2
MRI (Widrow e Hoff, 1960): W1 ajustáveis e W2 fixos
MRII (Widrow, Winter e Baxter, 1987): W1 e W2 ajustáveis
Fonte: Fausett, 1994
JDSS-LAC/INPE
Algoritmo - LMS
Algoritmo LMS - bloco processamento adaptável de sinais
baseado no uso das estimativas instantâneas da autocorrelação e
da correlação cruzada das entradas.
•Simplicidade de Implementação
•Habilidade de operação em ambiente desconhecido
•Habilidade para acompanhar no tempo as variações nas
estatísticas das entradas
5
JDSS-LAC/INPE
LMS - Inspiração na teoria de filtragem adaptativa
Entradas
produzidas
pelos
sensores
x1
w1
x2
w2
¦
.
.
.
xp
p
y
wp
Relação
entre a
entrada e a
saída
¦w x
k
k
k 1
Pesos
Filtro Espacial
Problema: Encontrar os pesos ótimos que minimizam o erro
quadrático
e dy
J
> @
1
E e2
2
d - saída desejada ou alvo
Solução: Uso das equações de Wiener-Hopf
JDSS-LAC/INPE
Problema da Filtragem Linear Ótima
•Performance ou função custo - Erro Quadrático Médio
J
> @
1
E e2
2
•Determinar os pesos ótimos que minimizem J
•Solução: Filtro de Wiener
J
> @
1
E e2
2
>
1
E (d y) 2
2
@
>
1
E d 2 2dy y 2
2
@
6
JDSS-LAC/INPE
Problema da Filtragem Linear Ótima
> @
>
1
E (d y) 2
2
@
>
J
1
E e2
2
J
1
1
1
E d 2 E>2dy @ E y 2
2
2
2
> @
1
E d 2 2dy y 2
2
@
> @
> @
> @
1
1
E d 2 E>dy @ E y 2
2
2
º
ª p
º 1 ª p p
1
E d 2 E «¦ wk xk d » E «¦¦ w j wk x j xk »
2
¬k 1
¼ 2 ¬j 1 k
¼
> @
JDSS-LAC/INPE
> @
>
p
1
1 p p
E d 2 ¦ wk E> xk d @ ¦¦ w j wk E x j xk
2
2 j1 k
k 1
J
@
•Valor quadrático médio da resposta desejada
rd
E[d 2 ]
•Correlação cruzada entre a entrada e a saída desejada
rdx (k )
E > xk d @,
k 1,2,..., p
•Autocorrelação entre as entradas
rx ( j , k )
J
E[ x j xk ],
j, k
1,2,..., p
p
1
1 p p
rd ¦ wk rdx (k ) ¦¦ w j wk rx ( j , k )
2
2 j1 k
k 1
7
JDSS-LAC/INPE
Gráfico de J
w1,w2,...,wp ==> Superfície de erro do filtro
X
•Forma de tigela (parabolóide) com um mínimo global bem
definido => o filtro é ótimo no sentido de que o erro
quadrático atinge o valor mínimo Jmin
Solução:
wJ
,
wwk
wk J
<=
Gradiente
da
superfície em relação
ao peso
k 1,2,..., p
JDSS-LAC/INPE
wk J
p
rdx (k ) ¦ w j rx ( j , k )
0
<= Condição ótima do filtro
j 1
p
¦ w r ( j, k )
rdx (k ),
j x
k 1,2,..., p
j 1
• wok - conjunto de pesos ótimos:
p
¦w
r ( j, k )
oj x
rdx (k ),
k 1,2,..., p
j 1
•Sistema de equações de Wiener-Hopf.
•Filtro de Wiener satisfaz estas equações.
8
JDSS-LAC/INPE
Método do Gradiente Descendente
Solução para o sistema de equações de Wiener-Hopf:
•É um conjunto de pesos ótimos para o filtro espacial.
•Necessita do cálculo da inversa de uma matriz p x p dos valores
da função de autocorrelação rx(j,k), j,k = 1,2,...,p
•Método do Gradiente Descendente evita o cálculo
•Procura iterativa pelo o ponto de mínimo da superfície de erro
•Os ajustes dos pesos acontece na direção do passo descendente
da superfície de erro, ou seja, em direção oposta ao vetor gradiente
JDSS-LAC/INPE
Método do Gradiente Descendente
J
wk J
p
rdx ( k ) ¦ w j rx ( j , k )
j 1
wJ
ww
'w K
Jmin
0
wo
w(n)
wJ
ww
w
w(n+1)
Adaptação de Haykin, 1994, p. 124
9
JDSS-LAC/INPE
Método do Gradiente Descendente
wk J ( n)
p
rdx ( k ) ¦ w j ( n) rx ( j , k )
Diferente sensores
no espaço
j 1
'w(n)
w(n 1)
K wk J (n)
k 1,2,..., p
w(n) K wk J (n)
Método da descida íngrime:
“O valor atualizado do k-ésimo peso de um filtro de Wiener
(projetado para operar no sentido do erro quadrático médio
mínimo) é o valor do peso atual mais um correção proporcional ao
negativo do gradiente da superfície de erro em relação ao peso
particular.”
JDSS-LAC/INPE
Método do Gradiente Descendente
wk J ( n)
p
rdx ( k ) ¦ w j ( n) rx ( j , k )
j 1
w(n 1)
p
·
§
w(n) K ¨¨ rdx (k ) ¦ w j (n)rx ( j , k ) ¸¸
j 1
¹
©
p
·
§
w(n) K ¨¨ rdx (k ) ¦ w j (n)rx ( j , k ) ¸¸
j 1
¹
©
Método exato - não há aproximações
10
Deficiências (Haykin, 1994)
•Análise difícil pela presença de não linearidade
•Visualização difícil do processo de aprendizagem devido as
camadas internas.
LMS
Usa estimativas instantâneas da função de autocorrelação
rˆx ( j , k ; n)
x j ( n ) xk ( n )
e da função de correlação cruzada.
rˆdx (k ; n)
xk (n)d (n)
11
LMS
wˆ (n 1)
p
·
§
wˆ (n) K ¨¨ xk (n)d (n) ¦ wˆ j (n) x j (n) xk (n) ¸¸
j 1
¹
©
p
·
§
wˆ (n) K ¨¨ d (n) ¦ wˆ j (n) x j (n) ¸¸ xk (n)
j 1
¹
©
wˆ (n) K >d (n) y (n)@xk (n) , k 1,2,..., p
Resumo do algoritmo LMS
•
Inicialização.
wˆ k (1) 0,
•
k 1,2,..., p
Filtragem.
p
y ( n)
¦ wˆ (n) x (n)
j
j
j 1
e( n )
d ( n ) y ( n)
wˆ k (n 1)
wk (n) Ke(n) xk (n),
k 1,2,..., p
12
Considerações
•Método do gradiente descendente (para um ambiente
conhecido):
•Partindo de uma configuração inicial, o vetor de pesos
segue
uma
trajetória
definida
precisamente
e
eventualmente atinge uma solução ótima.
Considerações
•LMS (para um ambiente desconhecido):
Estimativa inicial do vetor de pesos segue uma trajetória
aleatória.
•LMS:
•conhecido como um algoritmo de gradiente estocástico
•se o número de alterações tende a infinito, o vetor de
peso faz uma busca aleatória (random walk) sobre a
superfície de erro.
13