LISTA DE EXERCÍCIOS 01
1) Identifique abaixo o nome da junta, o eixo de rotação (no caso de juntas
rotativas) e explique-as.
• Tipos de Juntas ou Articulações
– Prismática ou linear (L):
• São compostas de duas hastes que deslizam entre si
JUNTA LINEAR
exemplo
1) Identifique abaixo o nome da junta, o eixo de rotação (no caso de juntas
rotativas) e explique-as.
• Tipos de Juntas ou Articulações
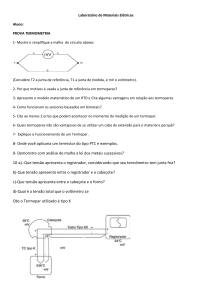
– Rotativa de torção ou torcional T
• Os elos de entrada e de saída tem a mesma direção do eixo de
rotação da junta.
EIXO DE ROTAÇÃO
ELO DE ENTRADA
ELO DE SAÍDA
JUNTA TORCIONAL (T)
1) Identifique abaixo o nome da junta, o eixo de rotação (no caso de juntas
rotativas) e explique-as.
• Tipos de Juntas ou Articulações
– Rotativa rotacional R:
• Os elos de entrada e de saída são perpendiculares ao eixo de
rotação da junta.
ELO DE SAÍDA
Eixo de rotação
ELO DE ENTRADA
EIXO DE ROTAÇÃO
JUNTA
ROTACIONAL
1) Identifique abaixo o nome da junta, o eixo de rotação (no caso de juntas
rotativas) e explique-as.
• Tipos de Juntas ou Articulações
– Rotativa revolvente V:
• O elo de entrada possui a mesma direção do eixo de rotação, mas o elo
de saída e perpendicular a este.
ELO DE SAÍDA
EIXO DE ROTAÇÃO
EIXO DE ROTAÇÃO
JUNTA REVOLVENTE
ELO DE ENTRADA
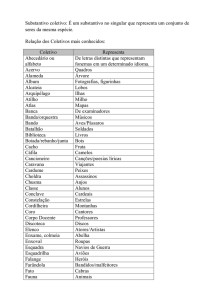
2)Nos braços mecânicos abaixo discriminados, identifique os
tipos de junta e o seu tipo
• Temos aqui um robô cartesiano
• Usa três juntas lineares.
• Junta Linear: é composta por duas hastes que deslizam-se entre si
JUNTA LINEAR
2)Nos braços mecânicos abaixo discriminados, identifique
os tipos de junta e seu tipo
•
•
•
•
•
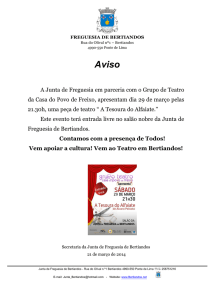
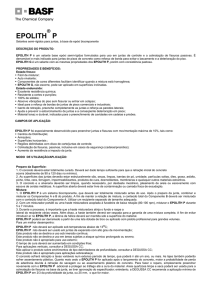
Temo aqui um robô cilíndrico.
Ele possui na base uma junta linear (L), uma junta rotativa (revolvente (V) ou torcional) e uma
terceira junta linear (L).
Forma uma configuração LVL
Junta Linear: é composta por duas hastes que deslizam-se entre si
Rotativa revolvente V: O elo de entrada possui a mesma direção do eixo de rotação, mas o elo de
saída e perpendicular a este.
EIXO DE ROTAÇÃO
JUNTA LINEAR
ELO DE SAÍDA
JUNTA REVOLVENTE
EIXO DE ROTAÇÃO
JUNTA LINEAR
ELO DE ENTRADA
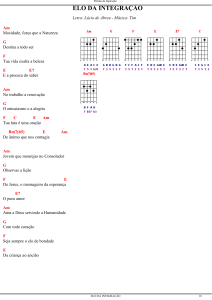
2)Nos braços mecânicos abaixo discriminados, identifique
os tipos de junta e o seu tipo
• Temo aqui um configuração Scara
• Ele possui uma junta revolvente (V), uma rotacional ( R) e uma
linear L
ELO DE SAÍDA
ELO DE SAÍDA
EIXO DE ROTAÇÃO
ELO DE ENTRADA
EIXO DE
ROTAÇÃO
EIXO DE ROTAÇÃO
Eixo de rotação
ELO DE ENTRADA
JUNTA REVOLVENTE
JUNTA ROTACIONAL
• 3) Cite 03 tipos de órgãos terminais utilizados em robôs
– O Órgão terminal é usado para descrever a mão ou ferramenta
que esta conectada ao pulso, como por exemplo, uma pistola de
solda, garras, pulverizadores de tintas, entre outros.
– Garra de dois dedos
– Garra articulada
– Garra para objetos cilíndricos
– Alguns órgãos terminais são dotados de sensores que
fornecem informações sobre os objetos.
• Garra de dois dedos
– Modelo simples e com movimentos paralelos ou rotacionais.
– Proporciona pouca versatilidade na manipulação dos objetos,
pois existe limitação na abertura dos dedos. A dimensão dos
objetos não pode exceder esta abertura.
• Garra para objetos cilíndricos
• consiste de dois dedos com semicírculos, os quais
permitem segurar objetos cilíndricos de diversos
diâmetros diferentes.
• Garra articulada
– A garra articulada tem a forma mais similar a mão humana, a qual
proporciona uma versatilidade considerável para manipular objetos
de formas irregulares e tamanhos diferentes.
– Esta característica esta relacionada com a quantidade de elos.
• 6) Que são atuadores (acionadores)?
• Acionadores são dispositivos responsáveis pelo
movimento das articulações (juntas) e do desempenho
dinâmico do robô.
– Elétricos
• Exemplo: Motor de corrente contínua
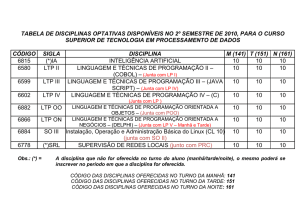
4) Explique os tipos de juntas utilizadas no punho abaixo discriminados bem
como os tipos de movimento provido pelo mesmo (guinada, rolamento e
arfagem).
JUNTA ROTATICIONAL (R)
Guinada ou Yaw
Rolamento
ou Arfagem
JUNTA TORCIONAL (T)
• 5) Explique o princípio de um motor
– Motor é um dispositivo que produz movimento de rotação
baseado na circulação de uma corrente elétrica sob um campo
magnético que produz uma força contraeletromotriz induzida
Campo magnético
Força contra-eletromotriz induzida
7) Qual a diferença entre o atuador (sistema de acionamento) pneumático e o hidráulico?
No pneumático é utilizado uma bomba de ar ao invés de uma bomba de óleo
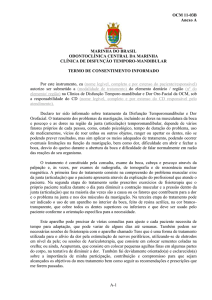
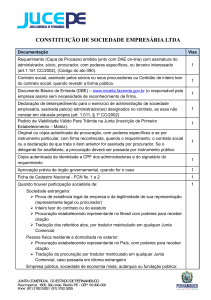
8) Explique a figura abaixo
A figura diz que quando maior a carga acionada a ser acionada
pelo atuador cresce acima de um certo limite é mais barato
utilizar um atuador hidráulico. Quando a carga a ser acionada
está abaixo de um certo limite é preferível um acionador elétrico.