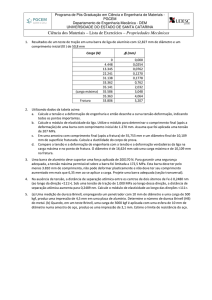
3
ESFORÇO NORMAL SIMPLES
O esforço normal simples ocorre quando na seção transversal do prisma atua uma força normal a ela (resultante)
e aplicada em seu centro de gravidade (CG).
3.1
BARRA CARREGADA AXIALMENTE
Um corpo tridimensional pode ser considerado como barra quando o seu comprimento é muito maior que as
dimensões da seção transversal. Usando a lei de Hooke e as definições de tensão e deformação, será desenvolvida
uma equação para determinar a deformação elástica de um elemento submetido a cargas normais. Considere a
barra da Figura 3.1a, que possui seção transversal variável ao longo do comprimento.
(a)
(b)
Figura 3.1: Barra com seção variável(a) e diagrama de corpo livre do elemento infinitesimal (b).
A barra está submetida a cargas concentradas nas suas extremidades e uma carga variável distribuída ao longo
do seu comprimento (por exemplo, peso da barra quando na vertical ou forças de atrito). O objetivo é calcular o
deslocamento de uma das extremidades da barra em ralação a outra. Considerando o princípio de Saint
Venant, pode-se considerar que a barra, em sua maior parte, deforma-se uniformemente, de modo que a tensão
normal se distribui de maneira uniforme pela seção transversal.
Utilizando-se o método das seções, isola-se um elemento infinitesimal obtido de uma posição qualquer da barra,
de comprimento dx e área A(x). O diagrama de corpo livre do elemento é mostrado na Figura 3.1b. A força axial
interna resultante é representada por F(x), uma vez que o carregamento externo faz com que ela varie no
comprimento da barra. A carga F(x) deformará o elemento infinitesimal, conforme ilustra a Figura 3.1b e,
portanto, o deslocamento de uma extremidade do elemento em relação a outra será d. A tensão e a deformação
do elemento são:
,
Equação 3.1
Desde que essas quantidades não excedam o limite de proporcionalidade do material, pode-se relacioná-las
utilizando a lei de Hooke.
Equação 3.2
O cálculo do deslocamento total é feito com a integração dessa equação em todo o comprimento L da barra.
3-25
∫
Equação 3.3
Caso o carregamento externo fosse constante no comprimento, assim como a área de seção transversal, conforme
mostra a Figura 3.2, e lembrando-se que o material sempre está sendo considerando homogêneo e isotrópico, a
Equação 3.3, resume-se a:
Equação 3.4
Figura 3.2: Barra com área constante e carregamento constante.
Caso a barra esteja submetida a diversas cargas normais ou tipo do material mudar de forma abrupta de uma
região para a outra a Equação 3.4 poderá ser aplicada a cada segmento de barra em que essas quantidades sejam
diferentes e o deslocamento final de toda a barra será a soma dos deslocamentos de cada uma dessas regiões.
Lembrando que para executar tal soma deverá ser aplicado o método das seções em cada uma dessas regiões
para a determinação do esforço normal interno na região.
3.2
BARRA ESTATICAMENTE INDETERMINADA
Quando o número de restrições dos deslocamentos ou reações de apoio em uma barra é maior que o número de
equações da estática, como por exemplo, a barra biengastada da Figura 3.3, a barra é dita estaticamente
indeterminada, pois as relações de equilíbrio não são suficientes para se determinar todas as reações.
O problema somente será solucionado ao estabelecerem-se equações adicionais de tal forma que seja possível
calcular todas as reações. Essas equações adicionais levarão em conta a geometria da deformação.
Figura 3.3: Barra biengastada.
De forma explicita, uma equação que especifique as condições do deslocamento é denominada condição de
compatibilidade. Uma condição de compatibilidade adequada para a barra da Figura 3.3 requer que o
deslocamento entre as extremidades A e B seja nulo. Essa condição pode ser expressa em termos da relação entre
cargas e deslocamentos dada pela Equação 3.4 dependente do comportamento do material, ou seja:
Equação 3.5
Supondo que o módulo de elasticidade e a área de seção transversal sejam constantes no comprimento, pode-se
3-26
escrever que as reações nos apoios são:
Equação 3.6
3.3
TENSÕES NORMAIS E TANGENCIAIS NUMA SEÇÃO OBLIQUA DE UMA BARRA
SOLICITADA AXIALMENTE
Em discussão anterior, 3.1, foi observado que uma barra solicitada axialmente apenas possui tensão normal em
seu interior. No entanto, se tomarmos um plano qualquer aa que secciona a seção transversal de uma barra
axialmente solicitada em um ângulo , observa-se que o esforço axial aplicado (resultante) pode ser decomposto
em duas outras forças nas direções normal e tangencial ao plano aa.
Figura 3.4: Esforço normal em uma seção obliqua
Essas duas resultantes, Fn e Ft irão causar tensões normais e cisalhantes, respectivamente, no plano aa. O
cálculo dessas tensões deve levar tanto a inclinação do plano quando a área Aa resultante do seccionamento
(diferente da área A original da seção transversal), ou seja:
Equação 3.7
Admitindo-se distribuição uniforme de tensão de cisalhamento, provocada pela componente Ft:
Equação 3.8
Observando-se as relações resultantes para n e t é possível identificar um ângulo onde as tensões normais
serão máximas e um ângulo onde as tensões cisalhantes serão máximas.
Como n é função de cos , o máximo valor de n irá ocorrer quando = 0, que corresponde a uma seção
3-27
perpendicular a seção transversal da barra, ou seja, max = . No caso de t, a tensão de cisalhamento no plano
inclinada é função de sen 2, portanto o máximo valor de t ocorrerá quando o ângulo = 45º, ou seja, max = /2.
3.4
BARRA SOB A AÇÃO DO PESO PRÓPRIO
Uma barra ou qualquer outro corpo tridimensional está sempre sujeito a ação do peso próprio, gerada pelo seu
peso específico em função da força da gravidade. Em certas análises, a resultante representativa do peso
próprio pode ser suprimida, quando seu valor for muito inferior às outras cargas envolvidas na análise.
A resultante representativa do peso próprio sempre estará aplicada no centro de massa do corpo, ou da barra, na
direção vertical com sentido para baixo.
Figura 3.5: Barra submetida a uma ação F e ao peso próprio P.
Seja a barra da Figura 3.5 submetida a uma carga axial F e a carga P(x) representativa do peso da porção x da
barra sobre a seção aa. A tensão nessa seção é calculada como segue, sendo N(x) a carga total (F + P(x)) na seção
aa, a a tensão na seção aa e A a área da seção transversal.
Equação 3.9
O valor máximo da carga resultante do peso próprio é calculado considerando-se a barra como um todo, portanto,
a tensão máxima na barra da Figura 3.5 é:
Equação 3.10
A deformação na barra será calculada considerando-se o deslocamento em uma porção dx localizada entre as
seções aa e bb. De acordo com a Equação 3.3, como o peso próprio está distribuído e agindo em todo o volume do
corpo, ou no caso da barra, ou seja, é uma carga variável com o comprimento, o deslocamento é calculado como:
3-28
∫
Equação 3.11
∫
∫
Integrando-se a Equação 3.11, chega-se a:
Equação 3.12
Na qual, o segundo termo do lado direito da equação representa a quantidade de deslocamento causada pelo peso
próprio da barra. A direção desse deslocamento é a mesma da direção da resultante do peso próprio e caso a
barra não esteja na vertical não será um deslocamento axial, como será visto mais adiante.
3.5
ENERGIA DE DEFORMAÇÃO
Quando forças externas são aplicadas a corpos os mesmos sofrem certa deformação, conforme já visto. Essa carga
a cada unidade de deslocamento é conhecida como trabalho das forças externas. Esse trabalho é armazenado pelo
corpo na forma de energia potencial de deformação. Seja a barra da Figura 3.6 com um módulo de elasticidade E
e área da seção transversal A constantes.
Figura 3.6: Barra deformando-se em função da carga F.
Considerando a carga F crescendo de um valor zero até um valor F, de forma constante e lenta no tempo, se o
material obedece a lei de Hooke, a relação entre a carga F e a deslocamento é representada por uma reta,
conforme a Figura 3.7.
Figura 3.7: Relação força deslocamento, Energia de deformação.
3-29
A linearidade da relação entre força e deslocamento, torna possível escrever um deslocamento infinitesimal d,
em função de uma carga infinitesimal dF, ou seja.
Equação 3.13
Da mesma forma que o definido na Equação 3.4.
3.5.1 PRINCÍPIO DA CONSERVAÇÃO DE ENERGIA
De acordo com o exposto inicialmente, pode-se enunciar o princípio da conservação de energia.
“O trabalho realizado é igual à variação na energia”
Corpos inicialmente descarregados, solicitados por um carregamento estático de forma que o material permaneça
trabalhando no regime elástico linear, quando não ocorre troca calorífica e os corpos não apresentam movimento
de corpo rígido, tem-se que:
Equação 3.14
Na qual, Ue é o trabalho das forças externas, calculado com a multiplicação da força pelo deslocamento, e U é a
energia de deformação do corpo.
Como o trabalho das forças externas é dado pelo valor da força a cada unidade de deslocamento, para uma carga
F’ qualquer, representativa de um deslocamento ’, a variação do trabalho das forças externas é:
Equação 3.15
O cálculo do trabalho das forças externas é feito substituindo-se na Equação 3.15 a Equação 3.13 e integrando.
∫
Equação 3.16
A Equação 3.16 nos diz simplesmente que a energia de deformação de um corpo U, ou barra no caso, é igual a
área sobre a reta que relaciona as forças com os deslocamentos desse corpo, ou barra. Sua unidade é
[força].[deslocamento].
Da mesma forma que para a barra com carga axial, um corpo volumétrico tridimensional tem sua energia de
deformação por unidade de volume dada por uma relação entre a tensão e a deformação durante o regime
elástico linear do material, ou mais simplesmente, a área sob o diagrama tensão deformação em seu regime
elástico linear e sua unidade é [força]/[área], ou [força].[deslocamento]/[volume].
3.6
MATERIAIS HOMOGÊNEOS ASSOCIADOS
Imagine agora, uma peça estrutural que seja composta por materiais com diferentes propriedades mecânicas
(módulo de elasticidade, coeficiente de Poisson, tensão limite, etc.). O comportamento dessa peça como um todo
3-30
deve ser avaliado considerando-se a participação de todos os materiais que a compõe. Seja o elemento estrutural
de barra da Figura 3.8 composto de dois materiais, o material 1 e o material 2 que possuem propriedades
mecânicas e geométricas de acordo com a Tabela 3.1.
Figura 3.8: Elemento estrutura de barra composto de dois materiais.
Módulo de Elasticidade
Coeficiente de Poisson
Tensão Admissível
Área da seção transversal
Material 1
E1
1
Material 2
E2
2
̅
̅
A1
A2
Tabela 3.1: Propriedades mecânicas e geométricas dos materiais do elemento estrutural de barra.
Desde que a carga F não faça com que ambos os materiais X e Y ultrapassem os limites de proporcionalidade do
material, pode-se relacionar as deformações como:
Equação 3.17
De acordo com a lei de Hooke, a Equação 3.17 pode ser reescrita como:
Equação 3.18
A Equação 3.18 nos diz que a relação entre os módulos de elasticidade dos dois materiais, assim como a relação
entre as tensões é constante (n). Da mesma forma, pode-se escrever uma relação constante para as áreas, onde
A1/A2 = m, sendo m constante.
A resultante ou esforço solicitante F, aplicado no centro geométrico da seção transversal, pode ser escrito como a
soma da resultante do material 1 com a resultante do material 2, ou seja, F = F1 + F2.
3.6.1 DIMENSIONAMENTO
No caso do problema a ser resolvido ser sobre o dimensionamento do elemento estrutural com materiais
associados, necessita-se calcular as áreas desses materiais para que as tensões admissíveis de cada um não
sejam ultrapassadas, em função da carga externa axial aplicada ao conjunto.
Sabendo-se que a força F resultante deve ser a soma das resultantes nas barras dos dois materiais, e ainda que a
força externa resultante em uma das barras pode ser escrita como uma multiplicação das constantes n e m pela
tensão e área da outra barra, ou seja, F1 = nm2A2, ou F2 = nm1A1, e que o cálculo das áreas pode ser feito em
função das tensões limites, sempre verificando para os dois materiais, de acordo com:
̅
̅
Equação 3.19
Sendo o valor final da área 2 o maior entre os valores calculados acima. A área 1 pode ser calculada com a
3-31
relação entre as áreas através da constante m. A verificação pode ser feita primeiro com a área 1, substituindo-se
os índices adequadamente nas Equação 3.19.
3.7
DEFORMAÇÕES AXIAIS ELASTOPLÁSTICAS - OPCIONAL
Todos os resultados obtidos até esse ponto levavam em consideração a permanência do material em seu regime
elástico linear. Se, por qualquer razão, a tensão de escoamento do material for excedida em qualquer ponto,
ocorrerão deformações plásticas, e a maior parte dos resultados obtidos anteriormente deixam de ser válidos.
Caso isso ocorra, deve se fazer uma análise mais minuciosa do problema, baseada em relações não-lineares entre
tensões e deformações.
Uma aproximação para considerar-se efeitos causados pela plastificação do material é considera-lo como um
material elastoplastico idealizado, para o qual o diagrama tensão deformação é constituído de duas retas,
conforme Figura 3.9, onde a reta inclinada representa o regime elástico linear e a reta horizontal a plastificação
do material.
Figura 3.9: Diagrama tensão deformação idealizado, material elastoplástico.
O diagrama de tensão deformação para o aço doce na região elástica e na zona plástica é parecido com essa
idealização.
Enquanto a tensão não ultrapassa o valor da tensão de escoamento e o material obedece a lei de Hooke.
Quando o material atinge e começa a deformar-se plasticamente sob carregamento constante. Se o
carregamento é removido, a linha de descarregamento, mostrada na Figura 3.9 em linha tracejada, paralela a
linha que ilustra a região elástica linear, não retorna a origem, indicando que o elemento estrutural sofre uma
deformação permanente εp.
Por exemplo, é possível calcular o deslocamento permanente de uma barra em função da deformação
permanente. Sendo ε a deformação total sofrida pela barra, a deformação permanente será εp = ε – εe, sendo εe a
deformação referente a tensão de escoamento, calculada ainda de acordo com a lei de Hooke. O deslocamento
permanente então é p = εpL, na qual L e o comprimento da barra.
3-32