UNIVERSIDADE ESTADUAL DO OESTE DO PARANÁ – UNIOESTE
CENTRO DE ENGENHARIAS E CIÊNCIAS EXATAS
CAMPUS DE FOZ DO IGUAÇU
CURSO DE ENGENHARIA ELÉTRICA
MODELAGEM E AVALIAÇÃO DA PROTEÇÃO DE ALIMENTADORES
E GERADORES SÍNCRONOS DISTRIBUÍDOS CONSIDERANDO SISTEMAS
DESEQUILIBRADOS
FABRICIO ANDRADE MOURINHO
FOZ DO IGUAÇU – PR
2013
FABRICIO ANDRADE MOURINHO
MODELAGEM E AVALIAÇÃO DA PROTEÇÃO DE ALIMENTADORES
E GERADORES SÍNCRONOS DISTRIBUÍDOS CONSIDERANDO SISTEMAS
DESEQUILIBRADOS
FABRICIO ANDRADE MOURINHO
Relatório de trabalho de conclusão de curso
apresentado ao Curso de Engenharia Elétrica da
Universidade Estadual do Oeste do Paraná, como
parte dos requisitos para obtenção do título de
Engenheiro Eletricista.
Orientador: Prof. M.Eng. Jonas Roberto Pesente
FOZ DO IGUAÇU - PR
2013
Dedico este trabalho à minha família.
AGRADECIMENTOS
Agradeço a Deus por todas as conquistas e lições de minha vida, e esta conquista
merece ser mencionada.
Agradeço aos meus pais, por infinitos motivos, mas destaco aqui a oportunidade que
me forneceram em ter uma formação de qualidade, sempre me motivando e desejando o
melhor. Adicionalmente, agradeço a minha família, e aos meus amigos por sempre estarem ao
meu lado. Ainda agradeço a minha namorada, Bárbara, por sempre me apoiar e entender o
motivo de minha ausência em alguns momentos.
Com relação à formação, agradeço a todos os professores da Universidade Estadual do
Oeste do Paraná por terem tanto me ensinado e, certamente, contribuíram para formação de
meu caráter e conduta. Fico orgulhoso em carregar comigo o nome desta Universidade.
Especialmente agradeço ao professor orientador Jonas Roberto Pesente pela
orientação, paciência e amizade, as quais serviram de motivação para a execução deste
trabalho, além de todo suporte e contribuições feitas ao trabalho.
Agradeço aos membros da banca examinadora por aceitarem o convite de avaliar este
trabalho e fazer contribuições de modo a enriquecê-lo.
Ao Laboratório de Automação e Simulação de Sistemas Elétricos – LASSE, local
onde iniciei minhas pesquisas na área de Sistemas de Energia Elétrica, adquiri conhecimentos
que utilizarei em minha vida profissional e fiz grandes amigos.
A Itaipu Binacional pela concessão de espaço físico, profissionais e bolsa, elementos
que foram importantes para a realização deste trabalho. Agradeço, especialmente, o
supervisor de estágio, o Engenheiro Rodrigo Pimenta.
RESUMO
MOURINHO, F. A. (2013). Modelagem e Avaliação da Proteção de Alimentadores e
Geradores Síncronos Distribuídos Considerando Sistemas Desequilibrados. Monografia de
Trabalho de Conclusão de Curso (Graduação) – Curso de Engenharia Elétrica, Universidade
Estadual do Oeste do Paraná – UNIOESTE, Foz do Iguaçu, 2013.
Resumo: O aumento da implantação de geradores de pequenos e médios portes conectados
diretamente nos sistemas de subtransmissão e distribuição de energia elétrica é uma realidade
observada em âmbito mundial, implicando em uma tendência de descentralização da
produção de energia elétrica. Diante desta nova modalidade de geração de energia elétrica, a
Geração Distribuída, é imprescindível realizar estudos para que a conexão de tais geradores
com as redes elétricas seja tal que minimize eventuais impactos negativos ao sistema e ao
próprio gerador. Os atuais sistemas de distribuição não foram planejados para operar na
presença de múltiplas fontes de energia, além de que é intrínseca a característica de
desequilíbrio de cargas entre as fases em tais sistemas, impactando diretamente sobre o
comportamento do gerador síncrono e consequentemente sobre o sistema de proteção
associado. O estudo acerca do efeito do desequilíbrio sobre o comportamento das funções de
proteção que constituem os sistemas de distribuição na presença de geradores síncronos se
encontra no estado da arte, e forma o produto deste trabalho. No contexto apresentado, este
trabalho apresenta a modelagem e a avaliação de funções de proteção de geradores síncronos
e de alimentadores de distribuição em aplicativo com capacidade de representação trifásica
detalhada do sistema, o ATP. Os resultados obtidos a partir de simulações evidenciam o efeito
do desequilíbrio sobre a atuação e comportamento das proteções presentes em sistemas de
distribuição com geração distribuída e mostram que em alguns casos é majoritária a
representação do sistema desequilibrado para o correto ajuste das funções de proteção.
Palavras-Chave: Geração Distribuída, Sistemas Desbalanceados, Sistemas de Proteção,
Proteção de Geradores Síncronos Distribuídos, Proteção de Sistemas de Distribuição,
Simulação Computacional de Sistemas de Energia Elétrica, Relés digitais.
ABSTRACT
MOURINHO, F. A. (2013). Modeling and Evaluation of Protection of Feeders and
Distributed Synchronous Generators Considering Unbalanced Systems. Monografia de
Trabalho de Conclusão de Curso (Graduação) – Curso de Engenharia Elétrica, Universidade
Estadual do Oeste do Paraná – UNIOESTE, Foz do Iguaçu, 2013.
Abstract: The increasing deployment of small and medium generators connected directly in
the sub-transmission and distribution systems of electrical energy is a reality observed
worldwide, resulting in a trend of decentralization of electricity production. Faced with this
new form of power generation, Distributed Generation, it is important to carry out studies on
the connection of these generators with electrical networks in order to minimize any negative
impacts to the system and the generator itself. The traditionals distribution systems were not
designed to operate in the presence of multiple sources of energy, and that is the intrinsic
characteristic of load imbalance between phases in these systems, impacting directly on the
behavior of synchronous generator and consequently on the protection system associated. The
study of the effect of imbalance on the behavior of the protection functions that constitute the
distribution system in the presence of synchronous generators is in the state of the art, and it is
the product of this work. In this context, this work presents the modeling and evaluation of
protective functions of synchronous generators and distribution feeders in a program capable
of representing detailed triphase system, ATP. The results from simulations show the effect of
imbalance on the performance and behavior of the protections present in distribution systems
with distributed generation and show that in some cases it is necessary to represent the
unbalanced system for proper adjustment of the protection functions.
Keywords: Distributed Generation System, Unbalanced Systems, Protection Systems,
Protection of Synchronous Generators Distributed, Protection of Distribution Systems,
Computer Simulation of Power Systems, Digitals Relays.
LISTA DE ABREVIATURAS E SIGLAS
ATP – Alternative Transients Program
FD – Fator de Desequilíbrio
GD – Geração Distribuída
GS – Gerador Síncrono
GSD – Gerador Síncrono Distribuído
SGD – Sistema de Geração Distribuída
MS – Máquina Síncrona
RMS – Root Mean Square
RP – Regime Permanente
SD – Sistema de Distribuição
SE – Sistema de Excitação
SP – Sistema de Proteção
SEE – Sistema de Energia Elétrica
SIN – Sistema Interligado Nacional
TC – Transformador de Corrente
TP – Transformador de Potencial
ANEEL – Agência Nacional de Energia Elétrica
RT – Regulador de Tensão
TDFR – Transformada Discreta de Fourier Recursiva
SUMÁRIO
1. INTRODUÇÃO ........................................................................................................................... 1
1.1 Justificativa ..................................................................................................................................3
1.2 Objetivo geral ..............................................................................................................................3
1.3 Objetivos específicos ...................................................................................................................4
1.4 Estrutura do trabalho ..................................................................................................................4
2. ESTUDOS DE CURTOS-CIRCUITOS EM SISTEMAS DE ENERGIA ..................................................... 6
2.1 Formulação e análise do problema de curtos circuitos .................................................................6
2.2 Estudo de curto-circuito para um Sistema de Distribuição com Geração Distribuída ................ 14
2.3 Considerações Finais ................................................................................................................... 18
3. PROTEÇÃO CLÁSSICA DE SISTEMAS DE DISTRIBUIÇÃO DE ENERGIA ELÉTRICA............................ 20
3.1 Introdução a proteção de Sistemas de Distribuição de Energia Elétrica .................................... 20
3.2 Dispositivos empregados na Proteção de SDEE .......................................................................... 21
3.2.2 – Religadores ............................................................................................................................ 23
3.2.3 – Seccionalizadores .................................................................................................................. 23
3.2.4 – Disjuntores ............................................................................................................................ 24
3.3 – Coordenação e Seletividade dos Dispositivos de Proteção...................................................... 24
3.3.1 – Coordenação entre Elos Fusíveis........................................................................................... 24
3.3.2 - Coordenação entre religador, seccionalizador e elo fusível .................................................. 25
3.4 Considerações Finais .................................................................................................................. 27
4. PROTEÇÃO DE GERADORES SÍNCRONOS DISTRIBUÍDOS................................................................ 28
4.1 Sistemas de Proteção em Sistemas de Geração Distribuída ....................................................... 28
4.2 Descrição e ajuste recomendado das Funções de Proteção de Geradores Síncronos ............... 32
4.3 Relés Comerciais ......................................................................................................................... 45
4.4 Considerações Finais ................................................................................................................... 46
5. MODELAGEM DAS FUNÇÕES DE PROTEÇÃO ............................................................................. 47
5.1 Estimação Fasorial ....................................................................................................................... 47
5.2 Funções de Proteção Implementadas ......................................................................................... 49
5.3 Considerações Finais ................................................................................................................... 57
6. EFEITO DO DESEQUILÍBRIO DE CARGA SOBRE A ATUAÇÃO DAS PROTEÇÕES DOS GERADORES
SÍNCRONOS DISTRIBUÍDOS E DOS ALIMENTADORES DE DISTRIBUIÇÃO ........................................ 58
6.1 Sistema teste ............................................................................................................................... 58
6.2 Definição dos Casos de Simulação .............................................................................................. 59
6.3 Análise da atuação das Proteções associadas ao GSD sob Condições de Desequilíbrio............. 59
6.4 Considerações Finais ................................................................................................................... 75
7.
CONCLUSÕES ...................................................................................................................... 77
REFERÊNCIAS .............................................................................................................................. 80
ANEXO A – PARÂMETROS DOS MODELOS DOS SISTEMAS TESTE .................................................. 84
AN.1 Parâmetros do Sistema de Distribuição Completo .................................................................. 84
AN.2 Parâmetros do Sistema de Distribuição Equivalente ............................................................... 86
1
1. INTRODUÇÃO
O crescimento constante do consumo mundial de energia elétrica, o estabelecimento
de tecnologias para exploração de novas fontes energéticas e a necessidade de aumentar a
eficiência dos Sistemas de Energia Elétrica (SEE) aliados a reestruturação do setor elétrico
(JENKINS, et al., 2000; ACKERMANN; ANDERSSON; SÖDER, 2001) tem contribuído
para a instalação de médios, pequenos e micro geradores nas redes de distribuição e
subtransmissão de eletricidade, modalidade conhecida como Geração Distribuída (GD).
Essa nova modalidade de geração de energia elétrica já está presente nos parques de
geração de diversos países (INTERNACIONAL ENERGY AGENCY, 2002; JENKINS et al.,
2000; SHINJI; YOKOYAMA; HAYASHI, 2009; WANG; ZHONG, 2009), inclusive no
Brasil (GRANVILLE et al., 2009). No caso do Brasil, especificamente, existe a perspectiva
de crescimento da oferta de energia elétrica proveniente de tais geradores, em complemento
aos geradores de grande porte tradicionais. Aliado à dificuldade crescente de financiamento
de grandes centrais de geração estão os problemas relacionados ao impacto ambiental
associado à implantação destas grandes centrais. Estes fatores contribuíram para a valorização
da geração distribuída (DIAS; BOROTONI; HADDAD, 2005).
Segundo a (AGÊNCIA NACIONAL DE ENERGIA ELÉTRICA, 2012), existem
atualmente 73 usinas operando em condição de co-geração qualificada, ou seja, que
satisfazem os requisitos normativos estabelecidos pela própria entidade, totalizando uma
capacidade instalada de 2.564.436 kW, cerca de 2% da capacidade total instalada no país.
Neste cenário, o estado de São Paulo possui grande destaque (SOUZA MACHADO,
2004), devido ao seu elevado número de usinas sucroalcooleiras que utilizam o bagaço da
cana, subproduto de seu processo industrial, para gerar energia.
A pequena parcela de contribuição da GD na geração de energia elétrica no Brasil
decorre do fato de que até recentemente não havia regulamentação padronizada de
procedimentos para a inserção de geradores conectados diretamente na rede distribuição, além
do reduzido conhecimento das tecnologias envolvidas na GD para sua operação adequada
(DIAS; BOROTONI; HADDAD, 2005), o que acabou por atrasar o processo de implantação
de geração distribuída na realidade do SEE brasileiro.
A GD apresenta potencial de expansão originado do crescimento do setor de cana de
açúcar no Brasil, estabelecimento da regulamentação associada (GRANVILLE et al., 2009) e
2
das tecnologias acerca de energias renováveis para a geração de energia elétrica, já aplicado
na região oeste do Paraná (DREHER et. al., 2010).
A GD é vantajosa quando comparada às fontes convencionais, pois, apresenta menores
perdas de transmissão, devido à proximidade com os centros consumidores, menor impacto
ambiental e ampliação da matriz energética (PITOMBO, 2010; LUIZ, 2012). Não obstante,
por outro lado, há entraves técnicos, econômicos e reguladores que se interpõem à sua
utilização.
Acerca do desempenho elétrico, a instalação de geradores distribuídos nos sistemas de
subtransmissão e de distribuição de energia elétrica deve ser precedida de uma série de
estudos visando determinar condições de operação, controle e proteção desses geradores de
forma a minimizar eventuais impactos negativos nos SEEs (CARVALHO, 2009).
Tais impactos são originados porque a conexão de geradores distribuídos nos sistemas
de distribuição impacta significativamente no fluxo de potência e no perfil de tensão dos
consumidores e equipamentos das empresas concessionárias de energia (PITOMBO, 2010),
justificando-se o estabelecimento de metodologias para avaliação rigorosa dos riscos
envolvidos (GÓMEZ, et. al., 2013).
Dentre tais impactos, destacam-se os associados aos sistemas de proteção (GÓMEZ,
et. al., 2013), uma vez a proteção nos sistemas de distribuição é realizada com elementos não
direcionais, tais como elos fusíveis e religadores, que somente operam adequadamente se não
houver contribuição de corrente desde os terminais das cargas.
De acordo com (SALLES, 2007), a implantação de geradores distribuídos em redes de
distribuição tem dificultado a aplicação dos esquemas tradicionais de proteção, quer seja nas
instalações da concessionária ou do acessante, especialmente em processos sazonais de
produção de energia elétrica.
Os estudos de proteção de alimentadores puramente radiais podem ser efetuados
através de técnicas tradicionais, pois o fluxo de corrente é unidirecional, o que simplifica a
parametrização dos dispositivos de proteção. A modificação da topologia tradicional do
sistema de distribuição causada pela inserção de GDs demanda então, a avaliação criteriosa da
performance de seus dispositivos de proteção e eventualmente, seu reajuste (LUIZ, 2012;
GÓMEZ, et. al., 2013).
Adicionalmente, os estudos acerca do desempenho do sistema de proteção de GSs, em
sua grande maioria, levam em conta a operação em redes equilibradas, de modo que o
3
comportamento dos SPs em redes desequilibradas é questão a ser resolvida.
Os SDs, no entanto, apresentam a característica intrínseca de desequilíbrio de cargas
entre fases e linhas de transmissão assimétricas (KERSTING, 2002). A análise adequada do
caso desequilibrado carece de formulação matemática que considere a representação trifásica
detalhada do sistema, que agrega maior complexidade em sua solução (PIARDI, 2012). Nesse
sentido, a análise de operação de GSDs conectados diretamente as redes de distribuição, com
seus respectivos equipamentos de proteção ainda não está consolidada
Salienta-se ainda que os geradores distribuídos não careçam somente de proteção
contra curtos-circuitos, mas também de proteção contra situações anormais de operação,
como, sobretensões, subtensões, subfrequências, sobrefrequências, desbalanços de corrente,
sobreexcitação, inversão de potência e perdas de excitação. Muitas de tais situações podem
ser ocasionadas por distúrbios que ocorrem na rede das concessionárias e, geradores
submetidos a tais condições, mesmo que por curto intervalo de tempo, podem sofrer danos
irreparáveis (KINDERMANN, 2008).
A partir do exposto, o escopo do desenvolvimento deste trabalho é delimitado pela
modelagem das principais funções de proteção presentes em GSDs e na rede de distribuição
em aplicativo de simulação de sistemas elétricos com capacidade de representação trifásica.
Os modelos foram implementados em ATP a partir da linguagem de programação
MODELS que permite a representação detalhada de todas as etapas dos relés digitais de
proteção.
A principal contribuição do trabalho é a verificação do impacto do desequilíbrio sobre
a atuação e o comportamento das proteções associadas aos sistemas de distribuição com
GSDs. A justificativa, objetivos e estrutura do trabalho são descritos abaixo.
1.1 Justificativa
A realização deste trabalho é justificada pela carência de análise do efeito do
desequilíbrio sobre o desempenho e atuação das funções de proteção empregadas em sistemas
de distribuição na presença de GSDs.
1.2 Objetivo geral
Desenvolver e testar uma biblioteca de modelos das principais funções de proteção
4
empregadas em sistemas de proteção de redes de distribuição e subtransmissão de energia
elétrica na presença de geradores síncronos distribuídos e analisar o efeito do desequilíbrio
sobre cada função. Os modelos devem ser desenvolvidos para o uso no ambiente
ATP/ATPDraw.
1.3 Objetivos específicos
•
Revisão bibliográfica acerca da teoria de componentes simétricas;
•
Revisão da teoria de faltas simétricas e assimétricas;
•
Compatibilização do sistema-teste em aplicativo trifásico detalhado e em sistema
unifilar fasorial para análise de curto-circuitos;
•
Revisão bibliográfica acerca da proteção dos elementos de sistemas de Geração
Distribuída;
•
Criação de um guia para ajuste de funções de proteção de sistemas de geração
distribuída;
•
Modelagem de bibliotecas de simulação das funções de proteção estabelecidas na
revisão em aplicativo com capacidade de representação trifásica detalhada;
•
Condicionamento das proteções de forma a atuar em seus limiares e aplicação do
desequilíbrio de forma a verificar seu efeito sobre a atuação da proteção; e
•
Gerar conclusões acerca dos resultados obtidos.
1.4 Estrutura do trabalho
Este trabalho está segmentado de acordo com a seguinte estrutura:
Capítulo 2: apresenta a revisão bibliográfica acerca de componentes simétricas e sobre
faltas em SEE. Neste capítulo é realizado um estudo de curto-circuito em um sistema de
distribuição real e compatibilizado tal sistema em aplicativo trifásico detalhado e em
aplicativo unifilar fasorial;
Capítulo 3: apresenta a revisão bibliográfica acerca da proteção tradicional em
sistemas de distribuição de energia elétrica e ilustra os principais dispositivos utilizados,
assim como os aspectos fundamentais da coordenação entre os dispositivos presentes nos
5
SDs;
Capítulo 4: apresenta a revisão bibliográfica sobre a proteção de Sistemas de Geração
Distribuída e traz os principais ajustes empregados;
Capítulo 5: apresenta a descrição da modelagem das funções de proteção
implementadas em aplicativo de simulação de transitórios eletromagnéticos de sistemas de
potência;
Capítulo 6: apresenta as simulações e os respectivos resultados com o SD operando
em condições de desequilíbrio de carga. Neste capítulo é evidenciado o efeito do desequilíbrio
sobre a atuação e o comportamento do sistema de proteção associado aos sistemas de
distribuição com geração distribuída;
Capítulo 7: apresenta as conclusões acerca dos resultados obtidos no trabalho;
Anexo A: são apresentados os parâmetros dos modelos que compõem o cenário de
estudo.
6
2. ESTUDOS DE CURTOS-CIRCUITOS EM SISTEMAS DE ENERGIA
O ajuste dos dispositivos de proteção nos sistemas de energia elétrica é realizado a
partir da reprodução ou estudo de condições anormais, geralmente chamadas de faltas. Este
método, especialmente quando aplicado aos curtos circuitos, permite antever e avaliar as
possíveis consequências dos defeitos previsíveis, de onde se pode verificar a suportabilidade
dos equipamentos e propor soluções técnicas para reduzir efeitos indesejados.
O estudo de curto-circuito em SEE é realizado aplicando-se diferentes tipos de eventos
(que originam curtos-circuitos) em diversos pontos do sistema e analisando as correntes em
pontos particulares como, por exemplo, nos locais onde estão instalados os relés de proteção,
próximos aos geradores e/ou próximo do ponto de conexão com a concessionária, para SDs.
Em Sistemas de Distribuição, principalmente, é necessário atualizar o estudo de curtocircuito sempre que ocorrerem alterações na topologia do sistema, decorrentes de expansões,
novas interligações e inserção de novos geradores (como é o caso da GD) e grandes motores
(dos SANTOS, 2008).
2.1 Formulação e análise do problema de curtos circuitos
(GRAINGER, 1996) define falha em um circuito elétrico como qualquer evento que
interfere com o fluxo normal da corrente que flui pelas linhas. Uma falha é considerada um
curto-circuito quando reduz, inesperadamente, a impedância do circuito vista a partir de um
ponto específico, geralmente induzindo o valor da corrente a se tornar superior ao valor da
corrente nominal.
As principais causas dos curtos-circuitos são:
•
Falha no isolamento de equipamentos;
•
Rompimento de condutores;
•
Descargas Atmosféricas;
•
Surtos de chaveamentos; e
•
Conexão indireta a terra através de árvores ou outros elementos.
7
Os curtos-circuitos podem ser classificados de acordo com sua natureza: trifásicos
(também chamados de simétricos); bifásicos, bifásicos-terra e monofásicos (também
chamados de assimétricos).
Eletricamente, cada tipo de curto-circuito corresponde a uma configuração topológica
específica e por isso é abordado separadamente na próxima seção, baseado no
equacionamento de faltas nos terminais de um gerador síncrono. Tal abordagem é utilizada
porque as conclusões obtidas podem ser estendidas a qualquer circuito elétrico através do
Teorema de Thevènin.
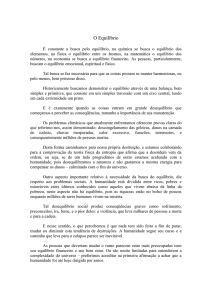
Curto-circuito Trifásico
Os curtos-circuitos trifásicos são originados quando as três fases do circuito se
conectam, como ilustrado na Figura 2.1 para um curto circuito franco ao potencial de terra.
Figura 2.1 – Curto-circuito trifásico nos terminais de um GS.
A análise desse tipo de falta pode ser realizada simplesmente através de seu diagrama
unifilar, uma vez que sob esta condição o modulo das correntes que circulam pelas fases são
iguais e o sistema elétrico permanece equilibrado.
É esperado que sob a condição de curto-circuito, as correntes sejam significativamente
superiores que as correntes de carga, o que valida à aproximação do sistema elétrico por um
circuito linear para solução de tensões e correntes.
A corrente de curto-circuito trifásico é apresentada na Equação 2.1. Valendo-se do
teorema da superposição, as tensões ao longo do sistema são obtidas da soma da tensão pré-
8
falta com a variação da tensão causada pela corrente de curto.
=
onde
é a tensão na fase a e
(2.1)
a impedância do GS.
Equacionamento de curtos-circuitos não simétricos
O acoplamento entre as fases em SEEs resulta em circuitos de difícil solução no
domínio de fase, para a condição de desbalanço de corrente entre as fases, apresentada durante
curtos-circuitos assimétricos.
A utilização do método das componentes simétricas elimina tal acoplamento e permite
a solução de curtos não simétricos de forma análoga a curtos-circuitos simétricos.
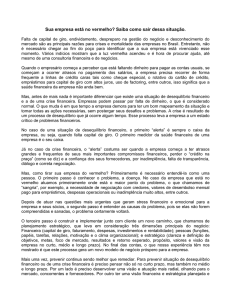
Tal método é baseado na decomposição dos n fasores não equilibrados em n sistemas
equilibrados de fasores (FORTESCUE, 1918). Aplicado aos SEEs em condição de
desequilíbrio, este método origina as seguintes grandezas no domínio de sequência1:
•
Componente de sequência positiva: Sistema trifásico equilibrado de grandezas
com a mesma sequência de fase (abc) do sistema original;
•
Componente de sequência negativa: Sistema trifásico equilibrado de grandezas
com a sequência de fase inversa (acb) àquela do sistema original;
•
Componente de sequência zero: Sistema de três grandezas monofásicas que são
iguais em módulo e em fase.
A Figura 2.2 ilustra a decomposição de um grupo de grandezas desequilibradas no
domínio de fase em um sistema de grandezas equilibradas no domínio de sequência:
Figura 2.2 – Componentes de sequência da tensão de um sistema trifásico desequilibrado.
Tal decomposição pode ser realizada pela operação apresentada na Equação 2.2,
1
Tal transformação é puramente matemática. De fato as grandezas existem no domínio do tempo, e as
representações no domínio de fase ou de sequência apenas simplificam os cálculos.
9
ilustrada para o conjunto de tensões desequilibradas
1
= 1
1
onde
=
1
1
,
,e
.
(2.2)
.
As grandezas no domínio de sequência podem ser obtidas pela operação inversa,
Equação 2.3:
=
1 1
1
3
1
1
1
(2.3)
A aplicação do método das componentes simétricas às relações de grandezas em
equipamentos dos SEE resulta em modelos de impedâncias no domínio de sequência para
cada classe de equipamento, que permite construir redes de sequência aplicáveis à solução de
curtos circuitos não simétricos.
As representações de todos os elementos podem ser encontradas em (GRAINGER,
1996). Enfatiza-se especialmente que as características de conexão de transformadores
alteram significativamente a distribuição das correntes durante curtos assimétricos, de modo
que devem ser cuidadosamente analisadas.
Curtos-circuitos Monofásicos
Estatisticamente, curtos-circuitos monofásicos são os mais frequentes em sistemas de
energia elétrica (GRAINGER, 1996).
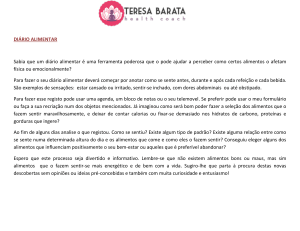
A Figura 2.3 apresenta a característica das conexões elétricas para um curto-circuito
monofásico nos terminais do GS.
10
Figura 2.3 – Curto-circuito monofásico nos terminais de um GS.
As condições de contorno para tal classe de curto-circuito são: Va = 0; e Ib=Ic=0.
Decompondo essas grandezas no domínio de sequência resulta na Equação 2.4.
1 1
= 1
3
1
1
1
0
0
(2.4)
Os circuitos de sequência se conectam em série, assim como ilustrado na Figura 2.4.
Figura 2.4 – Circuito equivalente para uma falta monofásica.
A partir do circuito da Figura 2.3 e da Equação 2.4, verifica-se que a corrente de falta,
pode ser determinada pela Equação 2.5:
=
+
3
+
+3
"
Como os três circuitos de sequência se conectam em série, as correntes
(2.5)
,
e
são iguais, no entanto a corrente de falta é a soma dessas três correntes no ponto de falta,
motivo pelo qual é incluído o fator multiplicativo ‘3’ no numerador da Equação 2.5.
11
Curtos-circuitos Bifásicos
Os curtos-circuitos bifásicos ocorrem quando duas fases se conectam, de forma
exclusiva, de modo que não há correntes de sequência zero na corrente de falta. A Figura 2.5
ilustra as conexões de tal classe de falta:
Figura 2.5 – Curto-circuito bifásico nos terminais do GS.
O curto-circuito bifásico nos terminais do GS possui como condições de contorno:
Ia = 0, Vb = Vc e Ib = - Ic e apresenta as formulações matriciais das Equações 2.6 e 2.7.
=
1 1
1
3
1
=
1 1
1
3
1
1
1
1
1
0
−
Por decomposição de tais grandezas no domínio de sequência resulta que
(2.6)
(2.7)
=
,
de maneira que os circuitos de sequência positiva e negativa se conectam em anti-paralelo
como ilustrado na Figura 2.6.:
12
Figura 2.6 – Circuito equivalente de sequência para falta bifásica nos terminais do GS.
Curtos-circuitos bifásicos a terra
O curto-circuito bifásico corresponde à condição onde duas fases se conectam ao
potencial de terra, Figura 2.7.
Figura 2.7 – Curto-circuito bifásico a terra nos terminais do GS.
As condições de contorno do curto bifásico à terra no terminal do GS são: Ia=0 e
Vb=Vc=0, e a relação matricial correspondente a da Equação 2.8.
1 1
= 1
3
1
1
1
0
0
Decompondo essas grandezas no domínio de sequência resulta que
Va/3 e
+
+
(2.8)
=
=
=
= 0, de onde se verifica que para essa classe de curto-circuito a rede
de sequência positiva se conecta em série com o paralelo das redes de sequência zero e
13
negativa, tal como ilustrado na Figura 2.8.
Figura 2.8 – Circuito equivalente para uma falta bifásica a terra nos terminais do GS.
No contexto da realização deste trabalho é providencial analisar o efeito da
proximidade da falha de geradores síncronos, como segue.
Efeito da proximidade da falha ao gerador síncrono
Em máquinas síncronas, o fluxo através de seu entreferro varia desde o instante em
que ocorre o curto-circuito até o regime permanente, devido ao decaimento das correntes nos
enrolamentos amortecedores e do acoplamento entre o circuito de campo e os circuitos do seu
estator.
Esse fenômeno é modelado por considerar reatâncias diferentes para cada período,
definidos cronologicamente como, subtransitório, transitório e de regime permanente, e são
representados em análises de sistemas elétricos respectivamente por. X’’d, X’d e Xd, tal que
X’’d < X’d < Xd (GRAINGER, 1996).
Para faltas trifásicas nos terminais do GS a excursão temporal da corrente de falta é
completamente descrita pela Equação 2.9.
Onde:
3 4
=
$ %
& '()* + + − ,- −
.$ %
& '(+ − ,-
/01
2
: tensão interna máxima do gerador, ou tensão pré-falta na barra de falta;
: impedância entre a tensão interna do gerador e a falta;
5: componente resistiva da impedância;
L: indutância do circuito;
+ : ângulo da tensão interna com relação à referência; e
(2.9)
14
,: ângulo da impedância Z.
Percebe-se da Equação 2.9 que a corrente de falta possui duas componentes: a
primeira exponencial e a segunda senoidal, que resulta na característica assimétrica com
relação ao eixo das abscissas, ilustrada na Figura 2.9.
Figura 2.9 – Resposta no tempo da corrente de falta em um circuito.
Este fenômeno é relevante ao passo que corresponde à elevação da corrente de falta
nos primeiros ciclos de sua ocorrência. Tal efeito é avaliado a partir da modelagem detalhada
do GS ou o representado por possuir a impedância do período de interesse.
2.2 Estudo de curto-circuito para um Sistema de Distribuição com Geração Distribuída
Esta seção apresenta os resultados do estudo de curto-circuito do Sistema de
Distribuição adotado neste trabalho, e é fundamentado na compatibilização entre a solução do
método clássico, onde é empregada a representação fasorial unifilar de grandezas e a
modelagem linear da rede, e a simulação com representação trifásica detalhada.
Descrição da rede de distribuição
O sistema utilizado para estudo de curto-circuito é apresentado em (ABREU, 2005).
Tal sistema consiste em parte da rede de distribuição instalada no interior do Estado de São
Paulo, ilustrada Figura 2.9.
15
2.9 – Sistema de Distribuição Teste para cálculo de curtos-circuitos.
Os dados de rede de tal sistema estão apresentados no Anexo A. Salienta-se que a
conexão do transformador ligado à Barra de conexão da subestação de subtransmissão com a
rede de distribuição (6 7899
:;
− 6) não permite a passagem de correntes de sequência zero, e
reduz a corrente de falta para as faltas monofásicas e bifásicas à terra.
Estudo de Curto-Circuito pelo Método Clássico
O método
tradicional
na solução
de curtos-circuitos
emprega
numerosas
simplificações na representação da rede (dos SANTOS, 2008):
Todas as barras com tensão pré-falta igual a 1 pu;
Desconsideração de cargas passivas do sistema;
Desconsideração de capacitâncias das linhas de transmissão;
Desconsideração de bancos de capacitores e reatores em derivação;
Transformadores operando com derivação nominal; e
Impedância da rede de sequência negativa idêntica à da rede de sequência positiva.
16
O estudo de curtos-circuitos no método clássico foi realizado no aplicativo Matlab®.
Estudo de Curto-Circuito pelo Método Trifásico Detalhado
Neste caso não são realizadas simplificações significativas na rede, considerando que
todas as dinâmicas de relevância, eletromecânicas ou eletromagnéticas são representadas por
modelos trifásicos detalhados, e resolvidos pela integração das equações diferenciais
correspondentes.
Desta forma, foi empregado o aplicativo Alternative Transients Program (ATP) na
realização do estudo. Salienta-se que o ATP apresenta como solução as excursões temporais
instantâneas, de forma que o valor comparado deste método com o método clássico é o valor
eficaz de regime permanente.
Resultados obtidos
As Tabelas 2.1, 2.2, 2.3 e 2.4 apresentam os resultados obtidos para faltas aplicadas
nos pontos do sistema de distribuição considerados de maior importância.
A solução apresentada pelo método clássico é chamada de caso-base e os valores
percentuais entre parênteses obtidos dos demais métodos de solução correspondem à variação
percentual com relação ao caso base.
Tabela 2.1 – Comparação das correntes de curto-circuito If para faltas monofásicas.
Faltas Monofásicas
Nó
If MatlabTM com condições
iniciais flat [A]
292
701
910
803
810
601
2544
2408
796
3673
1325
3909
If MatlabTM com
condições iniciais do
fluxo de potência [A]
2564 (0,8 %)
2425 (0,7 %)
790 (-0,75 %)
3722 (1,3 %)
1332 (0,52 %)
3979 (1,8 %)
If ATP[A]
2616 (2,8 %)
2568 (6,6 %)
1030 (29 %)
3502 (-4,6 %)
1469 (10,8 %)
4567 (16 %)
Verifica-se da Tabela 2.1 que a máxima diferença percentual de correntes desde a
aproximação da tensão em todas as barras por 1 p.u. até a utilização das tensões obtidas da
solução do fluxo de potência é da ordem de 2 %, considerada, portanto, não significativa. Esse
17
resultado pode ser estendido aos obtidos para outras classes de curtos-circuitos.
A máxima diferença entre as correntes do caso base com relação às correntes obtidas a
partir da representação detalhada é da ordem de 29%, considerada significativa. Tal diferença
é originada da representação das cargas e dos reatores, aspecto que evidencia que em sistemas
de distribuição, tal como o avaliado, sua modelagem pode alterar significativamente os
resultados do estudo.
A Tabela 2.2 apresenta a comparação das diferentes soluções para curtos-circuitos
bifásicos a terra no sistema avaliado, onde se verifica que a máxima diferença entre a
representação da tensão obtida a partir da solução do fluxo de potência é da ordem de 1,5% e
da solução considerando a representação detalhada é da ordem de 17%.
Tabela 2.2 – Comparação das correntes de curto-circuito para faltas bifásicas a terra.
Faltas Bifásicas a terra
Nó
292
701
910
803
810
601
If MatlabTM com
condições iniciais flat
[A]
1523
1455
591
3840
864
6201
If MatlabTM com
condições iniciais do
fluxo de potência [A]
1535 (0,8 %)
1466 (0,8 %)
585 (-1,02 %)
3896 (1,5 %)
869 (0,6 %)
6307 (0,2 %)
If ATP[A]
1628 (6,8 %)
1572 (8 %)
692 (17 %)
4178 (8,8 %)
950 (10 %)
6378 (2,8 %)
A Tabela 2.3 apresenta a comparação das diferentes soluções para curtos-circuitos
bifásicos no sistema avaliado, onde se verifica que a máxima diferença entre a representação
da tensão obtida a partir da solução do fluxo de potência é da ordem de 1,7 % e da solução
considerando a representação detalhada é da ordem de 35 %.
Verifica-se que para faltas bifásicas próximas ao Nó 292 apresentam correntes de
curto-circuito maiores que as faltas monofásicas e bifásicas a terra. Isto decorre porque as
faltas bifásicas não apresentam ligação à terra, e, portanto, não apresentam correntes de
sequência zero que são limitas pelo transformador.
A maior diferença percentual de correntes de falta acontece para as faltas aplicadas no
Nó 910 (35 %) e decorre de seu afastamento dos geradores, que resulta em correntes de curtocircuito menores onde, as correntes de carga constituem parcela considerável da corrente de
falta.
18
Tabela 2.3 – Comparação das correntes de curto-circuito para faltas bifásicas.
Faltas Bifásicas
If MatlabTM com
condições iniciais flat
[A]
6459
5892
1035
3021
2452
2471
Nó
292
701
910
803
810
601
If MatlabTM com
condições iniciais do
fluxo de potência [A]
6510 (0,8 %)
5933 (0,7 %)
1029 (-0,6 %)
3058 (1,23 %)
2466 (0,6 %)
2514 (1,7 %)
If ATP[A]
7110 (10 %)
6682 (13 %)
1400 (35 %)
3773 (24 %)
2877 (17 %)
2772 (12 %)
A Tabela 2.4 apresenta a comparação das diferentes soluções para curtos-circuitos
trifásicos no sistema avaliado, onde se verifica que a máxima diferença entre a representação
da tensão obtida a partir da solução do fluxo de potência é da ordem de 2 % e da solução
considerando a representação detalhada é da ordem de 21 %.
Tabela 2.4 – Comparação das correntes de curto-circuito para faltas trifásicas.
Faltas Trifásicas
Nó
292
701
910
803
810
601
If MatlabTM com
condições iniciais flat
[A]
6790
6221
1213
5900
2885
7981
If MatlabTM com
condições iniciais do
fluxo de potência [A]
6815 (0.4%)
6326 (1.6%)
1188 (-2%)
5924 (0.4%)
2907 (0.76%)
8044 (0.8%)
If ATP[A]
7413 (9%)
6641 (6.7%)
1474 (21%)
6500 (10%)
3331(15%)
8566 (7%)
Por fim, a partir da comparação direta entre as Tabelas, se verifica que as faltas
trifásicas resultaram nas maiores correntes de curto-circuito.
2.3 Considerações Finais
Foram apresentadas nesse capítulo a fundamentação para estudos de curtos-circuitos
em sistemas de energia elétrica e as aplicações de tais conceitos sobre o sistema de
distribuição sob análise.
O estudo realizado é baseado na comparação da solução apresentada pelo método
clássico, onde a rede é aproximada pelo modelo linear de rede e são desconsiderados todos os
19
elementos em derivação (carga, capacitores e reatores), derivações de transformadores, e
aspectos da dinâmica eletromagnética de geradores.
Foi verificada diferença máxima na solução de todos os curtos-circuitos de 35% entre
as correntes obtidas dos diferentes métodos de modelagem e solução, de forma que conclui-se
que a modelagem clássica pode resultar em aproximações não válidas na solução da corrente
de curto-circuito em sistemas de distribuição, corroborando para a afirmação de que a
modelagem trifásica detalhada é relevante para avaliação de faltas em sistemas de distribuição
contendo geradores.
No capítulo posterior são apresentados os principais dispositivos utilizados nos
sistemas de proteção de SDs e descritos, de forma sucinta, os principais conceitos aplicados
ao ajuste e coordenação entre tais dispositivos.
20
3. PROTEÇÃO CLÁSSICA DE SISTEMAS DE DISTRIBUIÇÃO DE ENERGIA
ELÉTRICA
Neste capítulo o trabalho é contextualizado dentro da filosofia atual de proteção de
SDEE. São apresentados os principais equipamentos utilizados na proteção de Sistemas de
Distribuição de Energia Elétrica, tais como os elos fusíveis, seccionalizadores, religadores e
os disjuntores. Em complemento, estão apresentados os principais aspectos da coordenação
destes elementos.
3.1 Introdução a proteção de Sistemas de Distribuição de Energia Elétrica
As empresas de distribuição de energia elétrica têm como objetivo principal fornecer
energia elétrica de qualidade para os consumidores e buscar o mínimo custo operacional. No
intuito de quantificar e monitorar o desempenho das concessionárias e de suas respectivas
redes de distribuição, a ANEEL adota indicadores de continuidade de serviço, estabelecidos
na Resolução no. 24, de 27 de janeiro de 2000. A ANEEL é responsável, adicionalmente, por
regular, fiscalizar e sancionar quanto necessário, a atuação das concessionárias.
Baseado nesses indicadores, interrupções no fornecimento de energia elétrica podem
originar multas para as concessionárias. Tais sanções são necessárias, pois descontinuidades
de fornecimento causam impacto direto sobre os consumidores, em especial indústrias, que
podem apresentar significativos lucros cessantes nessas condições, e processos críticos como
respiradores de hospitais.
As interrupções de energia elétrica podem ser causadas por numerosos fatores, como
tempestades, curtos-circuitos provocados por árvores ou animais e mau funcionamento de
equipamentos.
É obrigação da empresa concessionária desligar linhas ou equipamentos tão logo
aconteçam distúrbios, assim como realizar a imediata recomposição das instalações após a
extinção da anormalidade.
Além das medidas preventivas empregadas pelas concessionárias no intuito de
diminuir a ocorrência de falhas, as redes de distribuição dispõem de sistemas de proteção que
são constituídos de dispositivos responsáveis por isolar falhas e impedir sua propagação.
Conhecidamente, o sistema de proteção é projetado de forma a atender propriedades
básicas de confiabilidade, seletividade, velocidade e sensibilidade (CONCEIÇÃO, 2012).
21
A seletividade consiste de o dispositivo de proteção mais próximo do defeito
desconectar a parte defeituosa do sistema. Nesse intuito, o sistema de proteção deverá ser
capaz de distinguir se a ocorrência é interna ou externa à sua zona de proteção.
A velocidade pode ser definida como o tempo mínimo de operação para o dispositivo
de proteção atuar, a fim de reduzir ou eliminar as perturbações do sistema.
A confiabilidade é a propriedade do elemento de proteção de atender com segurança e
exatidão as funções que lhe foram atribuídas.
Por fim, a sensibilidade é a qualidade que o dispositivo deve possuir para reconhecer
com precisão a faixa de valores indicados para operação ou não operação.
O dimensionamento correto dos dispositivos de proteção de determinado SDEE
implica no seguinte conjunto de benefícios (CONCEIÇÃO, 2012):
-
Redução de danos aos materiais e equipamentos, diretamente associados à redução de
custos de manutenção e gastos com transportes e mão de obra;
-
Aumento da capacidade de realizar manobra, reduções do número de desligamentos e
do tempo de interrupção, que, sob o contexto geral da performance dos SEE,
corresponde ao aumento da sua segurança operativa.
-
Concomitante aumento de renda, por simultânea redução da perda de faturamento
durante interrupções, maior qualidade de energia, e redução de multas; e
-
Melhoria da imagem social da empresa.
Nas subseções subsequentes, os dispositivos de proteção empregados em SDEE são
detalhados, assim como apresentado os ajustes recomendáveis.
3.2 Dispositivos empregados na Proteção de SDEE
3.2.1 Chave e elo fusível
A proteção dos sistemas de SDEE é baseada na sensibilização por sobrecorrente, por
ser suficiente em sistemas radiais e incomparavelmente mais barata que dispositivos como a
proteção de distância.
Este é o motivo pelo qual a chave fusível é amplamente utilizada na proteção contra
sobrecorrentes. Sua operação consiste basicamente na fusão do elo de conexão entre seus
terminais ou elo fusível, quando percorrido por corrente de magnitude superior a nominal, por
22
tempo igual ou superior que respeite sua característica tempo-corrente (PARADELO JR.,
2006).
Os fusíveis são construídos sob as seguintes classes (CONCEIÇÃO, 2012):
-
Tipo “H”, denominados “fusíveis de alto surto”, e seu tempo de atuação permite
suportar correntes elevadas por tempo suficiente de forma a acomodar correntes
de in rush. Assim, são empregados na proteção de transformadores de
distribuição, e possuem correntes nominais típicas de 0,5, 1, 2, 3, e 5 A;
-
Tipo “K”, que apresentam rápida atuação e são empregados principalmente na
proteção de alimentadores de distribuição. É comum subclassificá-los em elos
preferenciais, que possuem corrente nominal de 6, 10, 15, 25, 30, 40, 65, 100, 140
e 200 A, e elos não preferenciais que possuem correntes nominais de 8, 12, 20,
30, 50 e 80 A; e
-
Tipo “T”, que apresentam atuação lenta e são utilizados na proteção de
alimentadores, de forma coordenada com os de tipo “K”. Possuem as mesmas
correntes nominais que elos tipo “K”.
Enfoque especial é dado à proteção de transformadores por elos fusíveis. Em tal
ocasião, o fusível deve satisfazer simultaneamente os seguintes requisitos:
1. Atuar para curtos-circuitos no transformador ou na rede secundária;
2. Não atuar para sobrecargas do transformador em até duas vezes a potência
nominal do transformador em regime permanente;
3. Fundir em tempo inferior a 17 segundos para correntes de 2,5 a 3 vezes a corrente
nominal do transformador;
4. Não fundir para correntes de magnetização dos transformadores, considerada
desde 8 a 12 vezes sua corrente nominal; e
5. Devem estar coordenados com as proteções a montantes e a jusante do
transformador.
O dimensionamento de elos fusíveis para proteção de alimentadores considera a
corrente de atuação, coordenação e seletividade. Em SDEEs radiais, o elo fusível
eletricamente mais próximo da falha e de retaguarda são denominados elo protetor (proteção
principal, que deve atuar primeiro), e elo protegido (proteção de retaguarda), respectivamente.
De acordo com (CONCEIÇÃO, 2012), o dimensionamento de elos fusíveis deve
considerar:
23
-
O crescimento anual da carga na determinação do fator de segurança k
apropriado. Na ausência da taxa de crescimento da carga, adota-se k=1,5;
-
corrente nominal do elo fusível igual ou superior a 150% da corrente de carga
máxima
prevista
no
seu
ponto
de
instalação
da
chave
fusível.
Concomitantemente, a corrente nominal da chave fusível deve ser igual à no
mínimo 150% da corrente nominal do elo fusível;
-
a corrente nominal do elo fusível igual ou inferior a 25% da corrente de curtocircuito monofásico mínimo no final do trecho protegido; e
-
determinações de correntes de curto-circuito fase-terra devem considerar
resistência de falta igual a 40 Ω (MAMEDE, 2011).
3.2.2 – Religadores
O religador é amplamente empregado para proteção de sistemas aéreos de distribuição
primária, e pode realizar tanto a abertura do alimentador por ajuste de corrente a partir de
características tempo-corrente, quanto seu fechamento automático, considerando certa
sequência de operações, também ajustáveis.
O religador permite a eliminação de defeitos temporários, que, segundo (GIGUER,
1988) correspondem desde 70% a 86% das falhas em SDEE.
Tal aspecto evita o deslocamento da equipe de manutenção e a verificação do
perímetro do alimentador em falta e reduz significativamente os períodos de interrupção de
fornecimento.
O princípio de eliminação de falta do religador associa uma curva de tempo inverso
proporcional a amplitude da corrente como sensor de falta, ajustável para cada atuação. É
comum adotar curvas mais inversas nas primeiras atuações de forma a evitar a fusão do elo
em tais atuações.
O religamento do circuito ocorre após temporização ajustável de forma independente,
onde é comum adotar duas primeiras longas e uma ou as duas últimas curtas.
3.2.3 – Seccionalizadores
O seccionalizador é o dispositivo que tem a função de seccionar o trecho da rede de
24
distribuição sob falha, automaticamente, sem sofrer rompimento permanente. Substitui o elo
fusível, e atua quando houver defeito situado a sua jusante, previamente interrompido pelo
religador “N-1” vezes, onde N é a quantidade permitida ao religador interromper o defeito.
Após sua operação, o seccionalizador permanece aberto e pode ser fechado
manualmente (PARADELO JR., 2006).
O ajuste indicado para seccionalizadores é igual a 80% do ajuste mínimo do
dispositivo de proteção de retaguarda (CONCEIÇÃO, 2012).
Devido o seu alto custo, não são comumente empregados em SDEE do Brasil. Na sua
ausência, as empresas adotam estratégias baseadas em chaves que são operadas manualmente,
de modo que alimentadores vizinhos possam alimentar cargas do alimentador defeituoso.
3.2.4 – Disjuntores
O disjuntor é o dispositivo cuja finalidade é interromper a corrente de determinado
circuito elétrico, assim como, desenergizá-lo ou restabelecer sua carga.
Disjuntores devem ser capazes de seccionar circuitos tanto sob carga nominal quanto
em curtos-circuitos e sobrecargas (GIGUER, 1988). Seu acionamento pode ser automático a
partir de elementos de proteção e controle, ou manual em manobras coordenadas.
3.3 – Coordenação e Seletividade dos Dispositivos de Proteção
O princípio fundamental dos estudos de coordenação e seletividade em redes de
distribuição é a superposição das curvas características tempo-corrente dos elementos de
proteção, a partir de onde se define as temporizações e ajustes mais adequados para cada
equipamento. As subseções seguintes descrevem, de forma simplificada, o ajuste para
coordenação de determinados elementos.
3.3.1 – Coordenação entre Elos Fusíveis
Inicialmente, o elo protetor, que interrompe a falta, deve possuir capacidade suficiente
para suportar a corrente de curto circuito à que será submetido. Em seguida, o elo fusível
25
protegido, à montante do protetor, deve coordenar com o elo fusível protetor para o maior
valor da corrente de curto-circuito no ponto de instalação do elo protetor (PARADELO JR.,
2006).
A seletividade entre tais elos em série é garantida se o tempo de interrupção do elo
fusível protetor for no máximo 75% do tempo mínimo de fusão do elo protegido (GIGUER,
1988).
Os fabricantes de elos fusíveis fornecem arranjos informando o máximo valor de
corrente de falta, para a qual haverá coordenação entre elos protegido e protetor.
A Tabela 3.1 apresenta o arranjo de elos fusíveis do tipo “K”. A título de exemplo, de
acordo coma Tabela 3.1, a máxima corrente de falta para o qual o elo protetor de 6K está
coordenado com o elo protegido de 10K é igual a 190A (GIGUER, 1988).
Tabela 3.1 – Coordenação entre elos fusíveis do tipo “K”.
Inominal do Elo
protetor [A]
6K
10K
15K
20K
25K
40K
10K
190,0
-
Corrente nominal do Elo fusível protegido [A]
15K
20K
25K
40K
65K
510,0
650,0
840,0
1340
2200
300,0
540,0
840,0
1340
2200
430,0
1340
2200
1100
2200
660,0
2200
1100
3.3.2 - Coordenação entre religador, seccionalizador e elo fusível
A hierarquia da proteção em SDEE é tal que na ocorrência de falhas temporárias no
trecho onde o elo fusível é proteção primária, o religador irá operar nos ciclos rápidos sem
que ocorra a fusão do elo. Contudo, se a falta persistir durante os ciclos rápidos, o elo fusível
deverá fundir para isolar o trecho sob defeito, de modo que o alimentador mantenha a
continuidade de serviço nos demais alimentadores.
A garantia da coordenação entre religador, seccionalizador e elo fusível é garantida se
forem observados os seguintes critérios (PARADELO JR., 2006):
- corrente mínima de atuação das unidades de fase terra do seccionalizador deve ser
igual a 80% da corrente mínima de ajuste do religador;
26
- religador deve ser ajustado para detectar a corrente de curto-circuito entre fases
mínimas e entre fase e terra mínima no final do trecho em que o seccionalizador atua como
equipamento de proteção primária;
- corrente de ajuste do seccionalizador deve ser menor ou igual a corrente de curto
circuito mínimo em sua zona de proteção primária;
- ajuste de contagens do seccionalizador igual ao ciclos de religamentos ajustado no
religador (que se encontra a montante) menos um;
- é recomendável que o religador seja ajustado com 2 operações lentas e 1 ou 2 rápidas,
e o seccionalizador para registrar até 2 ou 3 contagens;
- ajuste da unidade de sobrecorrente de fase do religador menor que a corrente de curtocircuito bifásica, dividida por fator de segurança entre 1,5 e 2;
- ajuste da unidade de sobrecorrente de neutro menor que a corrente de curto-circuito
monofásica mínima no qual o religador é proteção primária, e maior que a corrente de retorno
para o neutro, no caso do sistema operar de maneira desequilibrada (corrente em regime
permanente no neutro não nula);
- tempo de interrupção do elo fusível - para todos os valores possíveis da corrente de
curto-circuito - menor que o tempo mínimo de abertura do religador na curva lenta, que
garante que o elo possa fundir e desligue o trecho defeituoso.
A Figura 3.1 ilustra a coordenação entre religador e fusível. Evidencia-se, da
Figura 3.1, que a coordenação é garantida no intervalo de corrente “a”.
27
Figura 3.1 – Curvas de coordenação entre religador e fusível.
Adaptado de (CONCEIÇÃO, 2012).
3.4 Considerações Finais
Neste capítulo foi descrita a visão geral da proteção de sistemas de distribuição. Foram
sucintamente descritos a topologias dos sistemas de distribuição, elos fusíveis,
seccionalizadores, disjuntores e religadores.
Foram também apresentados, conceitos acerca da coordenação e seletividade de
dispositivos, que podem ser complementados pelo trabalho de (GIGUER, 1988).
No capítulo 4 é abordada a proteção de Geradores Síncronos, que se aplica a análise
realizada neste trabalho.
28
4. PROTEÇÃO DE GERADORES SÍNCRONOS DISTRIBUÍDOS
Este capítulo apresenta as funções de proteção que compõem a proteção dos elementos
típicos que formam os Sistemas de Geração Distribuída (SGD), desde o gerador até o ponto
de conexão do autoprodutor com a concessionária.
Estão descritas as perturbações as quais tais sistemas estão sujeitos, sejam elas internas
ou externas, e associadas perturbações às funções de proteção que garantem a integridade do
SGD em cada caso.
4.1 Sistemas de Proteção em Sistemas de Geração Distribuída
Neste trabalho o termo Sistema de Geração Distribuída (SGD) é utilizado para os
elementos que compõe desde o gerador até o ponto de conexão dos equipamentos do
autoprodutor com a concessionária distribuidora de energia.
É relevante para especificação, ajuste e coordenação da proteção, o detalhamento dos
elementos de potência e de manobra, compostos pelo gerador elétrico, transformador
elevador, linha de distribuição e barramentos das subestações (quando houver), que podem ser
tanto para manobra do transformador elevador quanto para manobra no ponto de conexão da
linha de distribuição com a linha da concessionária.
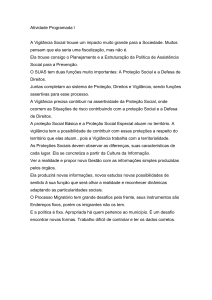
O diagrama típico dos elementos principais de um SGD, como definido, é apresentado
na Figura 4.1.
Linha para conexão com
a rede
G
Gerador
Transformador
Ponto de conexão com a
concessionária
Figura 4.1 – Diagrama unifilar do SGD.
Pela própria complexidade, a maior parte das funções de proteção de um SGD estão
associadas aos geradores síncronos. Assim, as perturbações as quais os geradores dos SGDs
estão sujeitos e as proteções associadas estão descritas como segue.
29
Perturbações Elétricas no Gerador Síncrono e Proteções Associadas.
Os geradores síncronos são compostos de numerosas partes móveis e fixas que
interagem entre si, e estão sujeitas a defeitos mecânicos (estruturais, térmicos) e elétricos. As
perturbações elétricas compõem a grande maioria desses efeitos, juntamente aos problemas
que causam aos geradores, assim como as funções de proteção mais adequadas para sua
identificação estão sintetizadas na Tabela 4.1.
A Figura 4.2 apresenta as funções de proteção e os sinais que são utilizados em tais
funções, para um SGD típico.
Figura 4.2 – Funções de proteção associadas ao SGD.
Via de regra, em geradores de médio e pequeno porte (até 30 MW), atualmente, esse
conjunto de funções de proteção é incorporada num único relé digital que é alimentado
através de transformadores de potencial e de corrente, sensores de temperatura entre outros, e
que são conectados em posições específicas para utilização específica de cada função de
proteção.
Tabela 4.1 – Principais perturbações nos geradores elétricos.
Evento
Principais Efeitos
Curto circuito monofásico nos
terminais
Curto circuito bifásico e trifásico
nos terminais
Sobreaquecimento dos
enrolamentos do estator
Sobreaquecimento dos
enrolamentos do estator
Sobreaquecimento dos
enrolamentos do estator
Sobreaquecimento dos
enrolamentos do rotor
Sobrevelocidade,
sobreaquecimento dos
enrolamentos e perda de
estabilidade
Danos a turbina
Curto circuito entre espiras
Curto circuito bifásico à terra e
no enrolamento (interno)
Perda de excitação (abertura do
campo)
Motorização
Função de Proteção
Indicada
Falha Estator-Terra (64)
Diferencial de fase (87F)
Diferencial Split Phase
(87SP)
Diferencial de neutro ou de
terra (87N ou 87G)
Perda de Excitação (40)
Direcional de Potência (32)
30
Desequilíbrio (corrente de
sequência negativa)
Vibrações e aquecimento nos
enrolamentos
Sequência negativa (46)
Desequilíbrio de tensão
Perturbações no Sistema Elétrico
Desbalanço de tensão (47)
Elevação não controlável de
tensão associada a colapso de
frequência
Perturbações no Sistema Elétrico
Proteção Volts/Hertz (24)
Manobra de sincronização
Torção do eixo de acoplamento
entre gerador e turbina
Proteção de cheque de
sincronismo (25)
Perturbações no Sistema Elétrico
Proteção de subtensão (27)
Operação em regime acima do
nominal
Sobrecarga (imagem)
térmica (49)
Sobretensão não controlável
Perturbações no Sistema Elétrico
Sobretensão de fase (59)
Perda de sincronismo
Perturbações no Sistema Elétrico
Out of step (78)
Perturbações no Sistema Elétrico
Proteção de frequência (81)
Perturbações no Sistema Elétrico
Proteção de mínima
impedância (21)
Perturbações no sistema elétrico
Salto de vetor e df/dt
Redução não controlável de
tensão
Elevação não controlável de
temperatura
Sobrefrequência ou
subfrequência
Curto-circuito a jusante do
gerador
Evitar ilhamento
O dano nos geradores elétricos para cada tipo de falta depende da sua potência
nominal. As normas vigentes estabelecem a complexidade do Sistema de Proteção (SP)
necessária para cada faixa de potência, tal como apresentado na Tabela 4.2.
Tabela 4.2 – Conjunto de proteções indicadas de acordo com a potência do gerador.
Tipo de proteção indicada
<1
Regime nominal MW
≥1
≥ 10
> 100
Diferencial
-
-
X
X
Terra restrita
-
-
X
X
Falta entre espiras do estator
-
-
-
X
Sobrecorrente com restrição por tensão
X
X
-
-
Sobrecarga
X
X
X
X
Sobretemperatura (detetor)
-
X
X
X
Corrente de sequência negativa
-
-
X
X
Perda de carga
-
-
-
X
Antimotorização
X
X
X
X
Perda de campo
-
-
X
X
Perda de sincronismo
-
-
-
X
Sobrevelocidade
X
X
X
X
Sobretensão
X
X
X
X
31
Falta à terra no rotor
-
-
X
X
Perda de campo
-
-
X
X
Indicador de vibração
-
-
X
X
Temperatura do mancal
-
-
X
X
FONTE: Caminha, (1999).
Juntamente com os geradores, os transformadores elevadores compõem o conjunto de
equipamentos de geração e tem seu sistema de proteção descrito a seguir.
Perturbações Elétricas no Transformador Elevador e Proteções Associadas
Os transformadores elétricos têm a função de transformar tensões e correntes de
maneira a adequar seu uso à função que se destina em cada etapa dos sistemas de energia, tais
como geração, transmissão e distribuição.
De acordo com a C37.91-2000 IEEE “Guide for Protective Relay Applications to
Power Transformers” os transformadores estão sujeitos, principalmente, as seguintes
perturbações:
•
Ciclo térmico: mudanças no carregamento do transformador podem causar
desgastes nos materiais de isolação;
•
Vibração: causada pela mudança a cada meio ciclo do fluxo magnético no
núcleo do transformador. A vibração pode, também, provocar desgastes na
isolação;
•
Correntes de Foucault: podem ocasionar aquecimento localizado e ainda
podem provocar a circulação de correntes elevadas no núcleo; e
•
Correntes de falta: podem danificar a isolação e as estruturas mecânicas dos
transformadores.
As principais proteções utilizadas na proteção elétrica de transformadores são a
Proteção Diferencial (87), a Proteção de Sobrecorrente (50/51) de fase e de neutro e a
proteção de Buchholz, que é previamente ajustada pelo fabricante.
As perturbações às quais os transformadores estão sujeitas e as proteções
recomendadas estão apresentadas na Tabela 4.3.
32
Tabela 4.3– Principais perturbações nos transformadores.
Evento
Principais Efeitos
Curto circuito monofásico e
bifásico à terra nos terminais
Curto circuito bifásico e trifásico
nos terminais
Sobreaquecimento dos
enrolamentos
Sobreaquecimento dos
enrolamentos
Sobreaquecimento dos
enrolamentos
Falha entre espiras
Função de Proteção
Indicada
Sobrecorrente de Neutro
(50/51N), Bucholz (63)
Sobrecorrente de fase
(50/51), Bucholz (63)
Diferencial (87),
Bucholz (63)
Por fim, compõem os sistemas de geração distribuída os alimentadores e,
eventualmente, barramentos para medição de faturamento e manobras. A proteção de
alimentadores de subtransmissão e distribuição de energia elétrica é constituída basicamente
por Relés de Sobrecorrente e os demais elementos apresentados no Capítulo 3. A proteção de
barramentos não será abordada neste trabalho.
4.2 Descrição e ajuste recomendado das Funções de Proteção de Geradores Síncronos
Nesta subseção são detalhadas as filosofias de cada função de proteção e o ajuste
recomendado.
Transformadores de tensão e de corrente
Os transformadores de tensão e de corrente são redutores de grandezas para utilização
em proteções, controladores e medidores de faturamento.
O Transformador de Potencial (TP) geralmente é construído como uma coluna
capacitiva que divide as tensões desde a tensão do condutor até a terra, com relação típica que
garanta 115 V na baixa tensão. Pode, em casos eventuais, ser construído como um
transformador com enrolamentos primário e secundário quando for mais econômico.
O Transformador de Corrente (TC) geralmente é construído por um enrolamento que
involucra o condutor principal do circuito protegido, com relação de transformação típica que
garante 5A no secundário para corrente máxima de operação do primário em regime. Em
especial deve-se atentar a saturação do TC a qual pode comprometer o sistema de proteção
associado.
33
Proteção Diferencial (87)
A função proteção diferencial (87) compara as correntes dos extremos do circuito
elétrico protegido, e atua quando houver diferença entre elas.
A Figura 4.3 ilustra um esquema típico da proteção diferencial utilizada na proteção
dos enrolamentos da armadura do GS.
Figura 4.3 – Esquema de ligação da Proteção Diferencial (87).
A proteção diferencial atua de acordo com a curva conhecida como característica.
A corrente para atuação instantânea, ponto inicial da característica é chamada pick-up,
enquanto a inclinação da curva é chamada de scope.
A Figura 4.4 apresenta a característica típica mais simples da proteção 87, onde a
curva em azul (ajuste) delimita as regiões de atuação e não atuação da função.
.
Figura 4.4 – Característica de atuação da função de proteção diferencial.
34
Na Figura 4.4 o eixo das ordenadas corresponde ao parâmetro derivado da corrente
diferencial, chamado corrente de operação ou corrente diferencial, enquanto no eixo das
abscissas corresponde ao parâmetro derivado do carregamento do elemento, denominado
corrente de restrição. Verifica-se que quanto maior a corrente de restrição, maior a corrente
diferencial é necessária para que a função atue.
Essa característica é assim implementada para evitar atuações incorretas devido aos
erros de precisão dos elementos envolvidos que aumentam com o carregamento do elemento.
Os erros tratáveis são erros de relação dos TCs de proteção (10% para cada TC), de relação de
transformação (2%) e de comutador de derivação sob carga (5%). Os dois últimos erros são
aplicáveis à proteção diferencial de transformadores.
Segundo (CARRASCO, 2009) o valor típico de ajuste mínimo varia entre 5 e 20% da
corrente nominal do equipamento protegido. No caso dos GSs, este tipo de proteção não atua
se a impedância de aterramento for considerável.
Deve-se atentar que a aplicação da proteção diferencial em transformadores com
conexão triângulo-estrela deve ter a fase da corrente de um dos terminais compensada entes
de ser comparada pela proteção, como mostra a Figura 4.5.
Em todos os transformadores a relação de transformação de corrente entre o lado de
baixa e de alta deve ser compensada pela relação dos transformadores de corrente. Certos
relés digitais podem executar internamente (através da lógica implementada no relé) tais
compensações de defasamento e magnitude das correntes.
Figura 4.5 – Proteção Diferencial (87) aplicada ao transformador com ligação triângulo-estrela.
Proteção de Sobrecorrente (50,51)
A proteção de sobrecorrente garante a proteção contra curto-circuitos, porém depende
35
de sua configuração adequada a cada tipo de aterramento do GS de modo a garantir seu
correto funcionamento. Esta função pode ser classificada como segue:
•
50: Sobrecorrente de fase instantânea;
•
51: Sobrecorrente de fase com tempo inverso ou definido;
•
50N: Sobrecorrente de neutro instantânea;
•
50G: Sobrecorrente de terra instantânea (residual Ia + Ib+ Ic);
•
51N: Sobrecorrente de neutro com tempo inverso ou definido; e
•
51G: Sobrecorrente de terra com tempo inverso ou definido; (residual Ia + Ib+
Ic)
A principal diferença entre estas funções é de que os elementos de neutro (N) recebem
a corrente diretamente do TC tipo janela, enquanto que os elementos residuais (G) operam a
partir da soma das correntes de fase, além de que as funções 50/51 empregam a corrente de
cada fase. Os dispositivos residuais (G) podem ser utilizados como proteção redundante.
As funções de neutro (N) devem ser ajustadas para atuar na corrente de curto-circuito
entre a fase e a terra o mais rápido possível.
Este tipo de proteção apresenta limitações na presença de uma resistência de
aterramento. Neste caso, a função pode não atuar devido à diminuição das correntes de defeito
e atuar de maneira incorreta devido às correntes de terceira harmônicas.
Para sanar este defeito utiliza-se a proteção 59, conectada a um filtro passa-baixa de
modo a não permitir a passagem da terceira harmônica. O filtro é conectado no secundário do
Transformador de Potencial (TP) que está alimentando à tensão na impedância de aterramento
do elemento. Somente correntes na frequência nominal (60 Hz) são vistas pela proteção 59, de
forma que esta proteção possa distinguir somente as tensões geradas pelos defeitos, atuando
de maneira eficaz (KINDERMANN, 2008).
A proteção de sobrecorrente com tempo inverso (51) é assim chamada porque atua
baseada numa curva que garante operação mais rápida quanto maior for à corrente de defeito.
A função 50/51é também utilizada para a proteção de linhas, em geral no nível de
subtransmissão e distribuição.
A seletividade da função 50/51 é realizada com base na temporização dos sistemas de
proteção. A filosofia de atuação de tal função exige que o relé mais próximo da falha opere
antes que os relés mais distantes, para garantir a seletividade (KINDERMANN, 2005).
36
Desta forma, pode-se separar os Relés de Sobrecorrente, quanto a sua curva tempocorrente, em dois grupos:
•
Característica de tempo definido: Se a corrente medida for maior que a
corrente de ajuste Ip, o relé emite a ordem de abertura do disjuntor, após o
atraso de tempo ta definido, para qualquer que seja o valor da corrente;
•
Característica de tempo inverso: este tipo de relé dispõe de diferentes curvas de
atuação, que alteram o tempo de atuação de forma a aumentar a rapidez de
acordo com a intensidade da corrente pelo relé.
De acordo com a norma IEC 60255-3 e IEEE Std. C37.90-1989 o tempo de operação
de relés de sobrecorrente é dado pela Expressão 4.1.
* =
<. >
B
? A −1
@
+ C. >
(4.1)
Onde: t é o tempo de operação do relé, D é o ajuste multiplicador de tempo, I: corrente
de falta, Ip: Corrente de ajuste (pick-up), e α, β e L são coeficientes que determinam a
inclinação característica do relé.
A Tabela 4.3 apresenta as constantes normalizadas pela IEC 255-3 e ANSI, e
utilizadas pelos fabricantes.
O ajuste das proteções de sobrecorrente nos alimentadores de distribuição é realizado
desde o elemento mais próximo da carga até o elemento próximo da subestação de
distribuição, considerando a ajuste do primeiro elemento o mais rápido possível (cerca de
150% acima da corrente máxima de carga), elevando o ajuste (pelo dial de tempo e pela
corrente de pick-up) para garantir coordenação e seletividade entre as proteções.
Tabela 4.3 - Valores de α, β e L para relé de sobrecorrente padrão.
Tipo de Curva
Norma
Normal Inversa
Muito Inversa
IEC 255-3
Extremamente Inversa
Inversamente de Tempo Longo
Moderadamente Inversa
Inversa
ANSI
Muito Inversa
Extremamente Inversa
β
0,14
13,5
80
120
0,0104
5,95
3,88
5,67
α
L
0,02
0
1
0
2
0
1
0
0,02 0,0226
2
0,180
2
0,0963
2
0,0352
37
Proteção de Sobrecarga (49)
A função de proteção contra sobrecarga (49), também conhecida como proteção de
imagem térmica, resguarda o elemento protegido contra sobrecargas de forma indireta, através
da informação da corrente do estator do gerador.
É mais usual, contudo, monitorar diretamente a temperatura do gerador através de
sensores de temperatura (RTD), instalados nos enrolamentos do estator e nos mancais do
gerador. Caso o gerador atinja uma temperatura superior a de projeto definida pelo fabricante,
a proteção deve atuar.
Geralmente, a função 49 emite um alarme quando a temperatura medida for de 95% da
temperatura máxima estipulada pelo fabricante, e deve atuar quando for superior a
temperatura máxima.
Se for necessário usar proteção por imagem térmica, a relação que define a imagem é
a da Equação 4.2, onde “t” é o tempo de disparo [s], Te a constante de tempo térmica do
gerador [s], Ieq é o valor das correntes de fase [A], k é o fator de sobrecarga contínua, θ a
elevação da temperatura atual e ∆T a elevação de temperatura para disparo.
(4.2)
G 8H − , G
* = D8 . E' F
K
|J − ,7 |
A configuração é realizada diretamente em termos da temperatura, onde se adota 95%
para emissão de alarme e 100% para desligamento. Parâmetros comumente adotados, quando
necessário, são k = 1,05.In e Te = 60 [min] e temperatura ambiente de 40ºC com elevação de
100ºC.
Proteção de Sobreexcitação (24)
A sobreexcitação é caracterizada pela condição de sobrefluxo magnético nos núcleo
do transformador ou do gerador.
Esta condição pode ser identificada pela razão entre a tensão de operação e a
frequência (V/Hz), e é identificada quando maior que um determinado valor, tipicamente
1,05 p.u. (CARRASCO, 2009).
O ajuste desta proteção é realizado de maneira percentual da razão entre a tensão
nominal pela frequência nominal (este valor pode estar entre 5 e 20%), com ajuste de tempo
38
definido ou tempo inverso. Caso seja conhecida a curva limite de sobreexcitação do gerador,
informada pelo fabricante, é recomendável ajustar a curva de atuação como a réplica da curva
limite, porém, deslocada para baixo cerca de 20% (KINDERMANN, 2008).
Proteção de Cheque de Sincronismo (25)
Para sincronizar um GS ao SEE, o gerador deve ter mesma sequência de fase da rede,
o mesmo sentido de rotação do campo girante, a mesma frequência elétrica, o mesmo valor
eficaz de tensão e defasamento angular mínimo.
A função de cheque de sincronismo (25) monitora as informações do lado do GS e do
sistema elétrico, permitindo fechamento do disjuntor quando as condições de sincronismo são
atendidas.
Proteção contra Motorização (32)
A proteção contra motorização é feita pela proteção direcional de potência (32), a qual
protege o gerador e a turbina contra a operação motorizada do gerador, evitando danos
mecânicos à turbina.
Esta proteção pode ser ajustada em 3% a 10% da potência nominal do GS
(KINDERMANN, 2008). Para evitar desligamentos incorretos por inversão de potência ativa,
o qual pode ocorrer na sincronização do GS ao sistema ou em algum transitório, é
recomendado adotar retardo de tempo em sua atuação, geralmente indicado pelo fabricante.
Proteção de Subtensão (27)
Em geral, o Regulador de Tensão (RT) do GS mantém a tensão terminal do gerador
dentro de limites pré-estabelecidos. Todavia, se houver uma sobrecarga severa, perda de uma
unidade geradora, falha no RT ou falta no sistema, pode ocorrer uma subtensão proibitiva no
barramento terminal do GS.
A função de subtensão (27) pode ser ajustada a partir da diferença de 10% da tensão
nominal, e ter estágios temporizados, de forma a atuar mais rapidamente durante quedas de
tensão de maior intensidade. Tipicamente adotam-se dois níveis de atuação:
a) Nível 1: 5 segundos para 90% da tensão nominal; e
39
b) Nível 2: 0,5 segundo para 75% da tensão nominal.
Proteção de Sobretensão (59)
A função de sobretensão (59) estabelece o limite superior do envelope de tensão de
segurança. Tipicamente se ajusta esta função a partir de dois estágios de operação
temporizados:
a) Nível 1: 5 segundos para 110% da tensão nominal; e
b) Nível 2: 0,5 segundo para 130% da tensão nominal.
Proteção de Frequência (81)
É requisito básico de um Sistema de Energia Elétrica que a frequência seja mantida
constante porque subfrequências podem causar desligamentos generalizados nas cargas e
máquinas rotativas e sobrefrequências podem causar sobrefluxos e danos mecânicos
associados à sobrevelocidades de máquinas rotativas.
A proteção de frequência é tipicamente ajustada para atuar em 0,5 segundos se a
frequência for menor do que 58 Hz ou maior do que 66 Hz.
Proteção de Sobrecorrente de Sequência Negativa (46)
Correntes de sequência negativa produzem vibrações e aquecimento em máquinas
rotativas, gerando desgaste e risco de danos às máquinas (KINDERMANN, 2008).
As normas ANSI C50.13-1977 e IEEE standard C37.102-1995 estabelecem como
limite de suportabilidade para correntes de sequência negativa no gerador, dada pela Equação
4.3:
² ∗ * = N
(4.3)
onde t é o tempo de defeito da corrente de sequência negativa (I2) e K é um valor que depende
da dimensão da máquina síncrona. Tal constante varia de 40 para máquinas de pólos salientes
a 10 para máquinas de rotor cilíndrico. O valor exato deste parâmetro é fornecido pelo
fabricante.
O valor da corrente de sequência negativa pode ser determinado pela Equação 4.4:
40
98O8PQ
1
=R (
3
+
+
-R
(4.4)
O ajuste que deve se adotar para a proteção de sobrecorrente de sequência negativa é
apresentada na Figura 4.6, onde se ilustra a margem entre a atuação e a região que implica em
danos para o GS.
Proteção contra corrente de sequência negativa.
Tempo
Curva de suportabilidade de corrente de sequência negativa
Curva de atuação da proteção
Corrente de sequência negativa
Figura 4.6 – Curva de ajuste da proteção e curva do GS: I2² t = K.
Proteção de Distância (21)
A proteção de distância possui como principal benefício a seletividade na proteção de
linhas de transmissão quando comparada às outras funções, podendo ser utilizada em
esquemas de desbloqueio permissivo ou disparo direto por sobre ou subalcance.
Nos alimentadores da distribuição, por exemplo, são utilizadas exclusivamente
proteções de sobrecorrente, que se valem do sistema de distribuição ser basicamente radial.
Em sistemas malhados, essa proteção não garante seletividade e pode atuar para falhas em
regiões protegidas por outros relés de sobrecorrente.
A função 21 pode ser empregada então, para suprir a deficiência dos relés de
sobrecorrente. A filosofia de funcionamento do relé de distância se baseia no cálculo da
impedância, admitância ou reatância (as quais são proporcionais a distância do ponto de
medição até o ponto de falha), com base nas medições de tensão e corrente.
O tipo de relé de distância que se mostra mais atraente é o relé de admitância, também
41
conhecido como Relé MHO. Devido a sua natureza direcional, os relés MHOs não atuam para
defeitos fora da sua direcionalidade, garantindo seletividade.
A representação da característica de atuação do Relé MHO no plano R-X corresponde
a circunferência que tangencia a origem, Figura 4.7.
X
Z1
R
Figura 4.7 – Característica de atuação do Relé MHO.
Na região de fronteira, delimitada pela circunferência, e a área externa a
circunferência, o SP não atua. A região interna da circunferência corresponde à delimitação
das grandezas elétricas na condição de falta, a qual o SP deve atuar.
É comum ajustar este relé para que ele tenha três zonas de atuação, Figura 4.8.
X
Z3
Z2
Z1
R
Figura 4.8 – Características das três zonas de atuação do relé tipo MHO.
De acordo com (KINDERMANN, 2005) as Zonas de proteção para linhas de
transmissão podem ser ajustadas da seguinte maneira:
•
Zona 1 (Z1): 80 % da impedância da LT a jusante do relé sem temporização.
•
Zona 2 (Z2): 100% da impedância da LT mais 50% a 60% da impedância da
42
LT a jusante seguinte com temporização igual a ∆t.
•
Zona 3 (Z3): 100% da impedância das duas primeiras LTs a jusante e mais
20% a 30% da impedância da próxima LT com temporização de 2∆t.
É importante ressaltar que a temporização ∆t varia de acordo com cada sistema. A
quantificação de ∆t deve ser tal que satisfaça a coordenação desta função com as outras
proteções do sistema.
Em sistemas de distribuição essa função não é atualmente empregada na proteção dos
alimentadores, podendo ser proposta devido à redução atual do custo dos relés associada à
garantia de seletividade após a conexão de geradores distribuídos aos alimentadores de
distribuição.2
Nos geradores a proteção de distância é utilizada como proteção de retaguarda para
elementos que estão conectados aos seus terminais, e é chamada de mínima impedância,
ajustada de modo a atuar para falhas no transformador elevador e eventualmente para falhas
nos alimentadores de distribuição.
Proteção de Perda de Excitação (40)
A perda de excitação de um GS pode sobre aquecer os enrolamentos do rotor e do
estator da máquina síncrona, causar sobrevelocidade no rotor e também comprometer a
estabilidade de GSs da mesma usina, colocando em risco o SEE (KINDERMANN, 2008).
As causas que provocam a perda de excitação são tipicamente:
•
curtos-circuitos na bobina do campo do rotor;
•
abertura na bobina de campo do rotor;
•
falha na excitatriz do GS; e
•
abertura acidental do disjuntor de campo;
Esta função pode ser implementada usando o princípio da função de distância (21),
geralmente adotando-se a característica MHO (admitância).
A função 40 direciona a medição de admitância para o interior da máquina síncrona e
seu ajuste deve cobrir a zona do lugar geométrico das impedâncias de perda de excitação, que
2
Atualmente empregam-se adicionalmente, à proteção de LTs, as proteções diferenciais. As proteções de
distância, no entanto, não demandam sistemas de transmissão de dados remotos para atuação.
43
é definida como um circulo de raio igual à reatância síncrona de eixo direto Xd,considerando
o deslocamento no eixo das coordenadas (offset) igual a -Xd’/2, onde Xd’ é a reatância
transitória do eixo direto do GS (KINDERMANN, 2008).
Salienta-se, ainda, que durante a perda de excitação a trajetória da impedância
verificada pela proteção entra na zona de atuação, fazendo com que a proteção atue. Pode-se
ajustar esta proteção da seguinte forma:
•
Zona instantânea: Região com diâmetro igual à impedância base da
máquina síncrona (
•
S
=
S ⁄√3 S ),
impedância do GS com offset de −
V′ W
ou seja, igual a 1 pu, na base de
;e
Zona temporizada: Região com diâmetro igual à
que configura região de Subexcitação do GS.
:,
com offset de −
V′ W
,
A Figura 4.9 ilustra a região chamada de zona de atuação da proteção que caracteriza o
lugar geométrico de perda de excitação.
X
−
′
X
2
R
1pu
:
Figura 4.9 – Zona de atuação da proteção de perda de excitação.
Em geradores onde a impedância transitória de eixo direto é inferior a 1 pu são
usadas características modificadas, tais como a “curva tomate” (LEITE, 2010). Os ajustes
dessa proteção nestes casos são verificados e atestados por simulações de transitórios
eletromecânicos.
Proteção de contra sobretensão residual (59N)
Faltas a terra em sistemas isolados caracterizam-se por deslocar a tensão fase-neutro e
por produzir tensões elevadas nas fases que não estão envolvidas no defeito, e que chegam a
atingir √3 vezes o valor da tensão nominal na fase, em regime permanente (SALLES, 2007).
44
É comum as concessionárias de energia utilizarem transformadores com conexão
delta-estrela para alimentar cargas dos consumidores trifásicos conectados aos seus sistemas
de transmissão e alimentadores de distribuição.
De acordo com (LINO, 2007), a implantação de GD em paralelo com a rede pode
alterar o comportamento do sistema em ocasiões de faltas na linha, o que dificulta a
identificação e eliminação do defeito. Devido à conexão delta-estrela do transformador da
interconexão mesmo com a abertura do disjuntor da concessionária o gerador distribuído pode
operar sem causar alterações evidentes nas variáveis elétricas do sistema, o que não
sensibiliza o sistema de proteção. Neste caso, o qual o gerador opera de forma ilhada, o GS
deve ser retirado de operação.
Em situações normais de operação e para um sistema equilibrado a componente de
sequência zero da tensão tem valor nulo. Entretanto, a ocorrência de faltas monofásicas ou
bifásicas a terra causa desbalanço nas componentes da tensão, sem alterar o módulo das
tensões de fase da rede (LINO, 2007). Desta forma a tensão normal de sequência zero pode
aumentar substancialmente quando o disjuntor da subestação da concessionária se abrir. Para
a determinação do ajuste de tal função, deve ser realizado um conjunto de simulações de
forma a atestar a qualidade do ajuste. No capítulo 6 é apresentado o ajuste recomendado.
Síntese do ajuste das proteções de geradores síncronos distribuídos
Na Tabela 4.4 esta apresentada a síntese dos ajustes descritos neste capítulo.
Tabela 4.4 – Ajuste das Funções de Proteção do GS.
Função de Proteção
Proteção Diferencial (87)
Proteção de Sobrecorrente (51/51N)
Proteção de Sub e Sobretensão (27/59)
Proteção de Frequência (81)
Proteção de Sobreexcitação (24)
Ajuste inicial recomendado
87: Declividade (slope):
- GS: 5 a 25%
- Transformador: 10 a 45%
Ajuste: Imin=0.2.In
51: Equação 4.1, comIp<Icc(mínimo) ou Ip=1.5.In;
51N: Equação 4.1 com Ip=0.3.In
27: 5s para 90% deVn; e0,5s para 75% de Vn
59: 5s para 110% de Vn; e0,5s para 130% de Vn
81: 0,5s para f < 58 Hz ef > 66 Hz.
24: Curva de atuação 20% abaixo da curva limite de
sobreexcitação do equipamento.
45
Proteção contra perda de excitação (40)
40: Zona de atuação da proteção dada pela Figura 4.9.
Proteção contra corrente de sequência
negativa (46)
46: Curva de atuação cerca de 20% abaixo da curva
apresentada na Equação 4.3.
Proteção contra Motorização (32)
32: Potência ativa reversa ajustada entre 3% a 10% da
potência nominal do GS
Proteção contra Sobretensão de neutro
(59N)
59N:O ajuste depende da resistência de aterramento do
GS e das conexões do Transformador de conexão.
4.3 Relés Comerciais
O relé digital corresponde ao dispositivo gerenciado por microprocessador e que
geralmente incorporam diversas funções ou até todas as necessárias para proteção de
determinado equipamento. Adicionalmente, estes equipamentos têm a capacidade de
monitorar e medir grandezas do sistema, além de se comunicar com outros dispositivos.
Os relés digitais permitem numerosas parametrizações, e, portanto têm como principal
característica a flexibilidade (SOUZA, 2010).
O ajuste das funções de proteção, a configuração de parâmetros operacionais e a forma
de conexão dos transdutores para utilização pelas funções de proteção variam
substancialmente de fabricante para fabricante, de maneira que convém registrar os principais
fabricantes e quais as peculiaridades de cada um durante o ajuste do conjunto de proteções.
Neste sentido, citam-se, em específico, as funções dos relés SEL-300G/2664, AREVA
P127, empregados atualmente na proteção de geradores distribuídos (SOUZA, 2010):
- 50/51 – Sobrecorrente de fase instantânea e temporizada;
- 50/51G – Sobrecorrente residual instantânea e temporizada;
- 21 – Distância de fase, com múltiplas zonas tipo MHO;
- 67G – Sobrecorrente direcional de neutro;
- 25 – Cheque de sincronismo;
- 27/59 – Subtensão e sobretensão fase-neutro e entre fases;
- 32 – Direcional de potência;
- 40 – Perda de excitação;
- 46 – Sobrecorrente de sequência negativa;
- 81 – Subfrequência e Sobrefrequência;
46
- 49 – Sobrecarga por imagem térmica;
- 60 – Perda de potencial;
- 64 – Proteção de terra;
- 49 – Imagem Térmica;
- 24 – Proteção de Sobreexcitação; e
- 87 – Diferencial.
A partir desse levantamento, abordaram-se nesse capítulo, os principais aspectos da
proteção de geradores síncronos conectados em SDEE.
4.4 Considerações Finais
Foi apresentado nesse capítulo uma revisão bibliográfica dos defeitos e proteções que
envolvem o sistema de geração distribuída, assim como o ajuste das principais funções de
proteções e as principais características dos relés digitais.
A integração de SGD junto às redes de subtransmissão e distribuição de energia
elétrica apresentam, além dos benefícios, uma série de desafios no que diz respeito ao impacto
que ela pode trazer aos SEE. Tanto a concessionária, quanto o Auto Produtor enfrentam
problemas técnicos, pois os SD iniciais não foram projetados para operarem com geradores
conectados diretamente a eles.
Justificam-se então estudos da influência da GD nos SD, bem como uma análise mais
refinada acerca de SP apropriados, que além de satisfazerem as normas especificadas pela
concessionária devem também zelar pela integridade do SDG.
As funções típicas de proteção de GDs e os ajustes recomendados estão apresentados
na Tabela 4.4.
O Capítulo 5 apresenta o modelos de proteção implementados em ATP/ATPDraw, os
quais fazem parte da contribuição técnica deste trabalho.
47
5. MODELAGEM DAS FUNÇÕES DE PROTEÇÃO
Neste capítulo são apresentados os modelos das funções de proteção implementados
na linguagem MODELS em ATP, os quais compõem o cenário de estudo do trabalho, assim
como a metodologia para a Estimação Fasorial.
5.1 Estimação Fasorial
A estimação fasorial é o processo numérico que compreende a extração dos fasores de
tensão e corrente a partir da medição física de tais grandezas, e é empregado na digitalização e
condicionamento dos sinais de entrada de um relé digital. Os fasores são utilizados na análise
de sistemas elétricos, simplificando a solução do estado de regime permanente e o cômputo
durante transitórios (CARDOSO, 2012).
A Transformada de Fourier é o método usualmente utilizado para estimação espectral
em sinais elétricos. Isso decorre devido sua simplicidade e qualidade dos resultados obtidos.
A Transformada de Fourier é empregada na formulação e análise dos SEE, mais
especificamente, para a estimação dos fasores das grandezas à frequência fundamental, caso
particular chamado de Transformada Discreta de Fourier (MIRANDA et al., 2005).
De acordo com (PHADKE, THORP, 2008), os algoritmos de estimação de fasores
podem ser agrupados, segundo seu método de processamento, como não recursivos e
recursivos. Todos os relés apresentados neste capítulo empregam sinais de tensão e/ou
corrente, tratados a partir do método da Transformada Discreta de Fourier Recursiva (TDFR).
No processo recursivo somente o primeiro fasor do sinal é calculado. Os demais são
atualizados a partir do cálculo do fasor imediatamente anterior.
A Transformada Discreta de Fourier (TDF) pode ser usada na sua forma recursiva
quando se deseja obter o valor instantâneo da componente fundamental de um sinal qualquer,
e com o objetivo de implementar algoritmos mais eficientes (PHADKE, THORP, 2008;
AGOSTINI, 2006).
Na prática, a conversão das amostras em medidas fasoriais através da TDF se resume à
implementação da expressão matemática apresentada na Equação 5.1.
48
Z=
onde:
√ [
(
−
\-
(5.1)
= ∑[
_c ^_ cos N,
(5.2)
= ∑[
_c ^_ sen N,
(5.3)
,=
f
[
= 2ghi
(5.4)
Nas Equações 5.1 a 5.4, N representa o número de amostras que compõe um período
da senóide de frequência nominal do sistema (f ), e i o intervalo de amostragem
correspondente.
Considerando X(r) como sendo a medida fasorial correspondente ao conjunto de
amostras x {k = r, (r+1), ..., (N+r-1)}, e assumindo a existência de um novo conjunto de
Dados x {k = r, (r+1) (r+2), ..., (N+r)} o fasor X(r+1) correspondente será obtido da Equação
5.5.
(j + 1- = (j- + √ [
(^[k9 − ^9 -
lm9n
(5.5)
Da Equação 5.5 se determinam as parcelas real e imaginária do fasor, por aplicar a
Identidade de Euler.
Observa-se, entretanto, que uma das particularidades da Transformada Discreta de
Fourier é o fato de que o uso desta ferramenta matemática fornece como resultado de módulo
de fasor apenas a componente de frequência fundamental dos sinais amostrados. Portanto, no
caso do sistema estar operando em regime permanente, o cálculo da TDF possui significativa
exatidão, caso as aquisições sejam realizadas a taxas de amostragem razoáveis (AGOSTINI,
2006), em contraponto da estimação durante transitórios.
O produto da estimação fasorial pelo método recursivo de grandezas senoidais em
regime, resulta em fasores com módulo e fase constantes, tal como ilustrado na Figura 5.1,
opostamente ao processo de estimação pelo método não recursivo, que resulta nos chamados
fasores girantes.
49
Figura 5.1 - Processo de estimação fasorial recursivo. Adaptado de (PHADKE, THORP, 2008).
5.2 Funções de Proteção Implementadas
Nesta Seção são apresentadas as funções de proteção que foram implementadas em
ATP utilizando a ferramenta MODELS.
Proteção Diferencial (87)
Neste trabalho foram implementadas proteções diferenciais baseadas na comparação
de somente dois grupos de sinais trifásicos. Assim, os sinais que devem ser aferidos para o
algoritmo da “Função 87” são as correntes de entrada (I1) e saída (I2) do elemento que se
deseja proteger, tal como ilustra a Figura 5.2.
I1
Elemento Protegido
I2
Figura 5.2 – Princípio da Proteção Diferencial.
O processo de estimação fasorial apresentado na Seção 5.1 é realizado para calcular os
fasores das correntes I1 e I2, o qual fornece separadamente suas parcelas reais e imaginárias.
A partir do cômputo dos fasores das correntes de entrada e saída do elemento
protegido, podem-se calcular as correntes de restrição e de operação do relé diferencial, tal
como apresenta as Equações 5.6 e 5.7, respectivamente.
9
= o(
pq
−
pq
- +(
$
−
$
-
(5.6)
50
;
onde:
, 98
e
, s3
= o(
pq
+
pq
- +(
$
+
$
-
são as partes reais e imaginárias das correntes
(5.7)
e
, respectivamente.
A característica de atuação da proteção é instantânea e neste trabalho corresponde à
inequação apresentada na Equação 5.8.
;
> 0.27 9 + 0.2
"
(5.8)
onde Iw corresponde a corrente nominal do GS. Os ajustes apresentados são sugeridos por
(KINDERMANN, 2008) para GSs.
Proteção de Sobrecorrente (51)
O algoritmo de sobrecorrente emprega a corrente do elemento que se deseja proteger
aferida em somente um ponto.
O processo de estimação fasorial apresentado na Seção 5.1 é utilizado para fornecer o
módulo da corrente nas três fases, o qual é utilizado na lógica de atuação do sistema de
proteção.
A curva de ajuste implementada no algoritmo da Função (51) corresponde ao descrito
no Capítulo 4, o que atende a norma ANSI e está descrita pela Equação 5.9. O ajuste
empregado é o de tempo inverso, e possui coeficientes descritos na Tabela 5.3.
* =
x.y
|
z
? A l
z{
+ C. >
(5.9)
onde:
t: tempo de operação do relé (s);
D: dial ou ajuste multiplicador de tempo;
I: corrente de falta;
Ip: corrente de pickup selecionada;
+, <eC: coeficientes que determinam a inclinação característica do relé (Tabela 4.3).
O modelo implementado permite que os parâmetros +, <, D e C sejam configurados de
acordo com a aplicação de modo a garantir a coordenação e seletividade do sistema.
51
Em relés digitais de sobrecorrente, programados para operar com característica de
tempo inverso definida pelas normas IEC (International Electrotechnical Commision) ou
ANSI (American National Standards Institute), o tempo de atuação pode ser obtido através da
integração da equação normalizada (IEC Std 60255-3, 1989).
A integração numérica é realizada em intervalos finitos de tempo (m), com duração ∆t.
Pode-se assumir que a razão entre a corrente de falta e a corrente de pick up é igual a M(t),
portanto a atuação da função baseada na integração é definida pela Equação 5.10.
} ~•(7-| l + C. >€
•
x.y
l
X* > 1
(5.10)
A magnitude do fasor da corrente é calculada a cada ciclo de aplicação da TDF. Caso a
Expressão 4.10 seja satisfeita, o relé emite o sinal para desligamento do elemento protegido.
Proteção de Subtensão (27) e Sobretensão (59)
As Funções 27 e 59 empregam a tensão terminal do GS. O processo de estimação
fasorial é utilizado para fornecer o módulo da tensão de fase nas três fases, o qual é utilizado
na lógica de atuação do sistema de proteção.
Os ajustes adotados neste trabalho correspondem a 0,9 p.u. e 1,10 p.u., de acordo com
(LINO, 2007).
Proteções de subtensão e sobretensão possuem, em geral, atuação instantânea, e seus
modelos podem indicar sinal de atuação devido a chaveamentos e transitórios operacionais.
De forma a modelar a função de forma a evitar indicações de atuação incorretamente, a saída
do sinal de atuação do algoritmo somente será verdadeira se a tensão violar um dos limites e
permanecer fora do intervalo considerado admissível por um tempo pré-determinado.
O tempo de retardo selecionado para as simulações é igual a 60 ms. Ou seja, a
proteção de subtensão, por exemplo, atuará somente se a tensão aferida for menor do que 0,9
pu e permanecer abaixo deste valor por tempo igual ou superior a 60 ms
Proteção de Frequência (81) e Salto de Vetor
As funções de sub e sobrefrequência monitoram a frequência do sistema, e atuam se
tal grandeza permanecer fora dos limites aceitáveis por tempo maior ou igual ao ajuste
especificado.
52
Neste modelo, é realizada filtragem do sinal monofásico temporal da tensão utilizado
na estimação da frequência, e computado o período do sinal pela passagem por zero em
sentido ascendente, tal como em (VIEIRA Jr., 2006).
O envelope aceitável da excursão da frequência adotado é de ± 2 Hz a partir do valor
nominal da frequência, e o retardo de tempo adotado, igual a 20 ms.
Incorporado às funções de sub ou sobrefrequência, foi implementada a função de Salto
de Vetor, também conhecida como relé de deslocamento de fase, amplamente empregada em
GDs para função de identificação de ilhamento, e desligamento do GD com objetivo de
garantir que não será gerada microrrede no SDEE.
Na ocorrência de ilhamentos, ocorre variação da frequência do GD e, por conseguinte,
do ângulo de fase da tensão terminal, fenômeno chamado de “Salto de Vetor”.
O relé de deslocamento de fase implementado compara o período da senóide de tensão
do ciclo atual com a duração do período do ciclo anterior. É iniciada uma nova medição cada
vez que a forma de onda da tensão cruza o eixo horizontal em sentido ascendente. A variação
da duração do ciclo é proporcional ao deslocamento de fase, que é o sinal de entrada da
função (VIEIRA Jr., 2006), (VIEIRA Jr. et. al. 2008).
O ajuste adotado é igual a 12º, indicado para GDs por (VIEIRA JR., 2006), o qual
garante não atuação durante transitórios eletromecânicos estáveis.
Proteção de Sobrecorrente de Sequência Negativa (46)
O limite de suportabilidade para correntes de sequência negativa é sistematizado pela
Equação 5.10 (KINDERMANN, 2008).
∗* <N
(5.10)
onde t é o tempo de defeito da corrente de sequência negativa (I2) e K depende dos parâmetros
construtivos da máquina síncrona. Tal constante varia de 40 para máquinas de pólos salientes
a 10 para máquinas de rotor cilíndrico (KINDERMANN, 2008) e é fornecida pelo fabricante
do gerador.
O modelo do relé implementado calcula a corrente de sequência negativa a partir das
medições das correntes nas três fases, tal como ilustrado na Equação 5.11.
onde
,
e
= ƒ(
+
+
-
são as correntes das fases a, b e c respectivamente e a é igual a
(5.11)
m. f/ƒ
. Uma
53
vez obtida
, seu valor RMS é extraído pela aplicação da Equação 5.12.
93\
=o }
•
•
(*-X*
(5.12)
O ajuste adotado corresponde ao valor 20% menor que a corrente estabelecida na
Equação 5.10. Uma vez que geradores elétricos podem, em geral, suportar até
funcionamento contínuo (KINDERMANN, 2008), o produto
= 0,1.
∗ * somente é computado
> 0.1. " e envia sinal de desligamento caso a Equação 5.13 for atendida.
quando
∗ * > 0,8 ∗ N
" em
(5.13)
Proteção contra sobretensão residual (59N)
Para detecção da componente 3.V0 empregada na Função 59N, o algoritmo
implementado realiza a soma fasorial da tensão estimada nas três fases, Equação 5.14
onde
,
3.
e
=
+
+
(5.14)
são calculados a partir do processo de estimação fasorial apresentado na
Seção 5.1. O ajuste adotado inicialmente é igual a3.
= 0,1.
".
Proteção contra sobrecorrente de Neutro (51N)
De acordo com (SALLES, 2007), caso o transformador de interconexão seja ligado em
estrela com o neutro aterrado do lado da concessionária, haverá a necessidade de utilizar a
Função 51N, pois a corrente de neutro do transformador é o sinal adequado para identificar
faltas assimétricas nas adjacências do transformador.
A função implementada efetua a soma da corrente temporal nas três fases,
Equação 5.15, sobre a qual o processo de estimação fasorial é realizado e fornece o módulo da
corrente de neutro, utilizado na lógica de proteção.
"
Ao valor eficaz da corrente
=
" é
+
+
(5.15)
então submetida à curva ANSI de tempo inverso, de
forma que o sinal para desligamento do transformador é enviado pela lógica correspondente.
De acordo com (LINO, 2007) o valor de pick-up indicado para tal função é
@s †‡@
= 0,1.
".
54
Proteção contra sobreexcitação (24)
A Função de proteção contra sobreexcitação (24), também denominada de
Volts/Hertz, mensura a tensão na proporção da frequência (V/f) em relação aos seus valores
nominais para identificar a presença de sobreexcitação. De acordo com as normas ANSI/IEEE
C50.13 e C57.12 para geradores e transformadores são estabelecidos limites para a relação
V/HZ em condição de operação contínua:
•
Geradores: 1.05 pu (base do gerador)
•
Transformadores: 1.05 pu (base do transformador) à plena carga com fator de
potência maior de que 0.8 ou 1.0 pu em vazio
O algoritmo do relé implementado estima o fasor da tensão de cada fase a partir da
TDFR, tal como apresentado na Seção 5.1 e transforma o valor para pu. A frequência é
calculada a partir da velocidade angular da máquina, que é fornecida pelo ATP. Após o
computo da frequência, tal grandeza é transformada também para valores em por unidade.
O ajuste da Função (24) consiste em uma curva ANSI de tempo inverso em pu, onde o
valor de pick-up é igual a 1.05. Assim, se o valor da integral na Equação 5.2 for maior do que
1, o relé emite um sinal de trip.
Tal função possui, adicionalmente, atuação instantânea para V/f superior a 1,25 p.u.
Proteção contra sobrecorrente no campo (Ifd)
O fenômeno típico que pode levar o GS a sobrecorrente de campo é a sobreexcitação,
para qual são empregadas proteções no estator (V/Hz). Ao circuito do rotor, em geral, é
incorporada a proteção de falha a terra, pela injeção e medição de corrente CA ou medição da
corrente de desequilíbrio (KINDERMANN, 2008).
Há, entretanto, na literatura, casos incomuns onde é utilizada proteção de campo por
funções de sobrecorrente.
Neste trabalho, no intuito de avaliar o efeito do desequilíbrio de carga pré-perturbação
na corrente de campo do rotor, foi implantado um relé de sobrecorrente que utiliza a curva
ANSI de tempo inverso, onde se empregou
@s †‡@
= 1,5.
"_
3@; .
Evidencia-se que o ajuste desta proteção deve ser tal que permita a coordenação com a
característica da capacidade térmica do enrolamento de campo e a curva de atuação do
55
limitador de sobreexcitação.
Proteção contra potência reversa (32)
O algoritmo da Função 32 utiliza como entrada as tensões e correntes de cada fase do
GS. O processo de estimação fasorial descrito na Seção 5.1 é utilizado para fornecer o modulo
e ângulo de tais grandezas.
A expressão para potência ativa monofásica é fornecida a partir da Equação 5.16.
Š = ∗ ∗ ‹Œ&•
(5.16)
onde e são os valores eficazes das tensões e correntes de cada fase e • é a diferença entre
o ângulo da tensão e o da corrente (ângulo do fator de potência).
Devido à característica da Equação 5.16, a potência ativa calculada será negativa
apenas se a parcela ‹Œ&• se tornar negativa. A Figura 5.3 ilustra o comportamento da função
cosseno em função dos quadrantes no plano complexo.
Im
g
2
g
0
Re
−
g
2
Figura 5.3 – Variação do sinal da função cosseno em função dos quadrantes.
Da Figura 5.3 se observa que o intervalo de − < • <
f
f
corresponde ao intervalo de
potência ativa positiva, ou seja, no primeiro e quarto quadrante. De forma análoga, a potência
ativa é negativa nos quadrantes restantes.
Conclui-se então, que a inversão de potência ativa pode ser identificada pela condição
de diferença angular entre tensão e corrente maior que 90o.
O ajuste da Função 32 implementada consiste univocamente na escolha do nível de
potência ativa mínima admissível por fase, associado à identificação de inversão de potência,
e foi adotado igual a 10% da potência nominal do GD.
56
Proteção contra perda de excitação (40)
A Função 40 identifica a condição de perda de excitação a partir do valor de
impedância aferido a partir dos terminais do GS, uma vez que a impedância aparente atinge
certa região não operacional no plano R-X somente na condição de subexcitação.
A impedância aparente a partir dos terminais do gerador é obtida da razão entre tensão
e corrente de cada fase, que é comparada à região do plano R-X definida na Figura 4.9.
O ajuste adotado emprega zona externa temporizada em 200ms e interna instantânea.
Religador
A função de religamento implementada consiste em três estágios que empregam a
rotina de sobrecorrente de tempo inverso, e que podem adotar diferentes curvas.
Mesmo que usualmente religadores possuam as duas primeiras curvas rápidas e as
ultimas lentas, esta configuração é particular a cada SDEE, de forma a definir a melhor
sequência de operação que garante a coordenação do religador aos equipamentos instalados à
sua jusante.
A filosofia adotada corresponde a condição onde se a falta for permanente, o religador
desenvolverá a sequência completa de operações, isto é, 2 religamentos e 3 disparos de
bloqueio, de tal forma que após o terceiro disparo o religador permanecerá aberto até receber
comando manual de fechamento. Em contraste, caso a falta for temporária e desapareça antes
do último desligamento, o sistema é reenergizado e permanece nessa condição.
Fusível
O elemento fusível possui característica de sobrecorrente de tempo inverso que, no
entanto, comercialmente estão disponíveis em numerosas configurações, conhecidas como
famílias. Neste trabalho os parâmetros das curvas de atuação de cada fusível do SDEE teste
foram determinados pela compatibilização da curva de fusão fornecida pelo fabricante S&C
Electric Company (S&C, 2013) e da Equação 5.17.
* =
x.
|
z
?
A l
Ž.z{
+ L
(5.17)
57
A Figura 5.4 apresenta um exemplo de compatibilização para elos de corrente nominal
igual a 25 A do tipo “K”, resultando em + = 2, < = 5,04, C = 0 e D = 2.
10
2
Curva implementada
Curva obtida a partir de testes experimentais - 25 K
Tempo [s]
10
10
10
10
1
0
-1
-2
10
2
10
3
Corrente [A]
Figura 5.4- Compatibilização curvas de tempo vs. corrente de fusíveis de 25 K.
5.3 Considerações Finais
Nesse capítulo foram apresentados os modelos das funções de proteção que compõem
o escopo de estudo deste trabalho, bem como os ajustes inicias das funções utilizadas para as
simulações e análises apresentadas no Capítulo 6, que aborda a avaliação do efeito do
desequilíbrio de carga sobre a atuação das proteções estudadas.
58
6.
EFEITO DO DESEQUILÍBRIO DE CARGA SOBRE A ATUAÇÃO DAS
PROTEÇÕES
DOS
GERADORES
SÍNCRONOS
DISTRIBUÍDOS
E
DOS
ALIMENTADORES DE DISTRIBUIÇÃO
Neste capítulo os resultados obtidos das simulações de atuação das funções de
proteção de interesse, correspondente à proteção de SDEE contendo geração distribuída são
apresentados e discutidos.
O objetivo geral é avaliar o desempenho de atuação das proteções, em termos de
capacidade de identificação e atrasos envolvidos, quando da existência de desequilíbrio de
carga, condição na qual os sistemas de proteção não foram projetados para atuar nem
tampouco consideram na determinação de seus ajustes.
Inicialmente o Sistema de Distribuição teste é apresentado, assim como a metodologia
utilizada no estabelecimento dos casos de simulação. Por fim, os resultados são apresentados
e as análises são deliberadas.
6.1 Sistema teste
O sistema teste utilizado neste trabalho está descrito em (ABREU, 2005) e
apresentado inicialmente na Figura 2.9.
Uma vez que os efeitos do desequilíbrio são verificados a partir das tensões e correntes
aferidas nos terminais do gerador, as análises para as proteções do GSD foram realizadas
sobre o sistema equivalente, tal como apresentado em (PIARDI, 2012), Figura 6.1.
Gerador
Síncrono
Distribuído
807
Barramento
Infinito
806
Z807-806
C807
Zth
C806
Figura 6.1 - Diagrama Unifilar do SD Equivalente Utilizado para Testes.
Neste sistema, a GD é caracterizada por um GSD com potência nominal de 10 MVA,
conectado diretamente no SDEE de tensão de 13,8 kV. A carga nominal conectada ao nó 807
59
é de 5,5 MW com um fator de potência indutivo de 0,99.
Sobre todas as funções, aos sinais de corrente se inferiu redutores (TCs) com
características C400 e aos sinais de tensão redutores (TPs) com características lineares.
6.2 Definição dos Casos de Simulação
Todas as análises realizadas são baseadas em variações do caso de referência,
chamado caso base, que corresponde ao Sistema de Distribuição equivalente na condição de
fluxo de carga apresentado no Anexo A.
O desequilíbrio de carga empregado é definido em (SALIM, 2011) e consta de
desequilibrar a carga entre as fases de forma diferencial, de tal forma a manter a potência
trifásica constante e igual a do caso equilibrado, como descrito pelas Equações 6.1, 6.2 e 6.3.
’sO = (1 + E-’
’:O = (1 − E-’
’‡O = ’ “
“
(6.1)
(6.2)
(6.3)
“
onde “E” é o Fator de Desequilíbrio (FD) associado; S
•
é a potência monofásica consumida
no caso equilibrado; S–— é o valor da potência monofásica onde ocorre o incremento de carga;
S˜— , a potência associada ao decremento de carga e, por fim, S™— é parcela não sujeita ao
desequilíbrio.
Os desequilíbrios empregados para verificação do desempenho das funções de
proteção foram iguais a 0%, 25% e 50%, aplicados à carga conectada ao terminal do gerador.
O evento simulado corresponde àquele que causa a atuação da função sob avaliação.
A Seção 6.3 apresenta os resultados obtidos a partir das simulações.
6.3 Análise da atuação das Proteções associadas ao GSD sob Condições de
Desequilíbrio
São apresentados nesta seção os resultados das principais simulações de cada função
de proteção implementada, a fim de observar o comportamento e desempenho de tais funções
sob condições desequilibradas. As análises realizadas são baseadas na comparação da atuação
da proteção em condições equilibradas de carga, ajustadas de forma a atender os critérios de
60
cada função de proteção, consideradas, portanto, casos de referência de atuação.
Avaliação do desempenho da Proteção Diferencial (87) em condições de
desequilíbrio
A atuação da proteção diferencial foi simulada por considerar o GSD modelado como
fonte de tensão ideal em série com sua reatância sub-transitória de eixo direto, de onde se
aferiram as correntes de fechamento de neutro e do terminal do estator.
O evento simulado consta na aplicação de curtos-circuitos monofásicos a 50% do
enrolamento do estator, considerando os três patamares de desequilíbrio estabelecidos na
Seção 6.2.
A Figura 6.2 apresenta a corrente diferencial e o ajuste adotado de acordo com o
Capítulo 5 para os três patamares de desequilíbrio. Foi utilizado um TC do tipo C400 para a
redução de corrente, de tal forma que a Figura 6.2 apresenta a corrente no secundário do TC
referenciada no primário. Tal metodologia de representação também é utilizada para as
demais funções que empregam a corrente como grandeza de interesse.
C o rren te [A ]
500
400
Corrente diferencial FD=0%
300
Ajuste FD=0%
200
100
0
0
0.1
0.2
0.3
0.4
0.5
0.6
Tempo [s]
C o rrente [A ]
500
400
Corrente diferencial FD=25%
300
Ajuste FD=25%
200
100
0
0
0.1
0.2
0.3
0.4
0.5
0.6
Tempo [s]
C orren te [A ]
500
400
Corrente diferencial FD=50%
300
Ajuste FD=50%
200
100
0
0
0.1
0.2
0.3
0.4
0.5
0.6
Tempo [s]
Figura 6.2 – Corrente diferencial e ajuste da função 87. I) FD = 0%. II) FD = 25% III) FD = 50%.
61
A Função implementada emite sinal de desligamento caso a corrente diferencial for
maior que o ajuste adotado. De acordo com a Figura 6.2, se verifica que tanto a corrente
diferencial quanto o ajuste (que depende da corrente de operação) não são sensíveis ao
desequilíbrio.
Foi constatado ainda que o desempenho de tal função é similar para curtos-circuitos
bifásicos e trifásicos no estator, mesmo com elevados valores de FD.
Adicionalmente, foram realizadas simulações de curtos-circuitos fora da região de
proteção delimitada pela proteção diferencial, onde se verificou que não houveram atuações
incorretas para qualquer nível de desequilíbrio.
Este resultado é esperado pela própria filosofia de atuação da função diferencial, e
atesta esta função como adequada para emprego em sistemas desequilibrados.
Avaliação do desempenho da Proteção de Sobrecorrente (50/51) em condições de
desequilíbrio
A simulação realizada consiste em aplicar curtos-circuitos trifásicos francos no nó
intermediário entre a barra infinita e o GSD.
A Figura 6.3 apresenta os fasores das correntes nas três fases para FD = 0% e 50%,
assim como os sinais de desligamento de cada fase da função de sobrecorrente.
Na Figura 6.3 se pode observar que o módulo da corrente das três fases em regime
permanente difere em regime permanente devido ao desequilíbrio. No entanto, tal corrente de
regime, incluído desequilíbrio, é significativamente inferior às correntes de curto-circuito, de
forma que o efeito do desequilíbrio não é significativo.
Apesar de haver aumento da diferença entre sinais de desligamento entre as fases na
presença do desequilíbrio, a diferença é inferior a 20 ms, não significativa para proteções de
sobrecorrente.
É relevante salientar que o desequilíbrio na função de sobrecorrente será tão mais
influente quanto à aproximação da corrente de regime e de curto circuito.
62
C orrente [A ]
FD = 0%.
1500
1000
500
0
0
Ia
Ib
Ic
Trip a
Trip b
Trip c
0.1
0.2
0.3
0.4
0.5
0.6
0.4
0.5
0.6
Tempo [s]
C orrente [A ]
FD = 50%.
1500
1000
500
0
0
Ia
Ib
Ic
Trip a
Trip b
Trip c
0.1
0.2
0.3
Tempo [s]
Figura 6.3 – Proteção de Sobrecorrente (51). I) FD = 0%. II) FD = 50%.
Avaliação do desempenho da Proteção de Subtensão (27) e Sobretensão (59) em
condições de desequilíbrio
A atuação da função de Subtensão foi simulada a partir do curto-circuito trifásico no
nó intermediário entre o GSD e a barra infinita.
A Figura 6.4 apresenta a tensão na “fase a” (Vfa) do evento simulado para os três
patamares de desequilíbrio avaliados.
Na Figura 6.4 se pode observar que a tensão Vfa difere em regime de acordo com o
desequilíbrio devido a queda de tensão da fase proporcional à sua corrente.
63
Proteção de Subtensão (27)
1.05
Vfa FD = 0%
1
0.95
Vfa FD = 25%
X: 0.05245
Y: 0.9805
Vfa FD = 50%
Ajuste de Subtensão
Tensão [pu]
0.9
0.85
0.8
0.75
0.7
0.65
0.6
0.55
0.05
0.1
0.15
0.2
Tempo [s]
0.25
0.3
0.35
0.4
Figura 6.4 – Avaliação da Proteção de Subtensão (27).
Entretanto, na ocorrência do defeito o impacto do desequilíbrio é reduzido, assim
como a diferença entre tempos de atuação. Se considerado FD = 50%, a diferença entre o
modulo da tensão terminal das fases“a” e “b” de regime é de cerca de 5%, que pode ser
significativa para operação contínua em termos da tensão aferida para fins de controle.
De forma análoga, a simulação realizada para análise da função de sobretensão,
corresponde ao chaveamento em derivação de um banco hipotético de capacitores com
potência igual a 5,5 Mvar, no nó intermediário entre o GSD e a barra infinita.
Foi verificado nas simulações que, a exemplo do caso anterior, a diferença da tensão
terminal em regime pré-evento não é significativa.
Adicionalmente, a Figura 6.5 ilustra o comportamento da tensão terminal nas três fases
do GSD para FD = 50%, onde se verifica resultados análogos aos da função de subtensão.
Destaca-se, no entanto, que a tensão terminal de regime permanente da “fase b” é de cerca de
1,08 p.u., próxima do limite superior de tensão, de forma que deve-se atentar para condições
de operação sob desequilíbrio e valores reduzidos de pick-up de tensão.
64
Proteção de Sobretensão (59).
1.15
Tensão [pu]
1.1
1.05
1
Va FD = 50%
Vc FD = 50%
Vb FD = 50%
Ajuste de sobretensão
0.95
0.9
0.05
0.1
0.15
0.2
0.25
Tempo [s]
Figura 6.5 – Tensão terminal nas três fases do GSD para FD = 50%.
A sensibilidade da atuação da proteção de sobretensão depende, sobretudo, da
composição da condição de regime sob desequilíbrio com a magnitude da perturbação.
No sistema analisado, o chaveamento de um banco de capacitores de 2 Mvar considerado FD
igual a 50%, resulta nas trajetórias de tensão apresentadas na Figura 6.6, onde se verifica que
somente a fase de menor carregamento extrapola o limite superior de tensão, de onde se
conclui que, novamente, a modelagem trifásica detalhada é relevante para análise de casos
onde há proximidade do limiar de atuação durante o evento que a proteção deve identificar.
Proteção de Sobretensão (59) - FD = 50%.
Va
Vb
Vc
Ajuste de Sobretensão
Tensão [pu]
1.15
1.1
1.05
1
0.95
0.05
0.1
0.15
0.2
Tempo [s]
Figura 6.6 – Tensão terminal do GSD para FD = 50%.
0.25
65
Avaliação da Proteção de Frequência (81) e Salto de Vetor
O evento simulado para sensibilizar a proteção de subfrequência foi um curto-circuito
trifásico no nó intermediário entre o GSD e a barra infinita. Tal evento fez com que o GSD
perdesse o sincronismo. A Figura 6.7 apresenta a excursão da frequência que é estimada pela
tensão terminal de cada fase do gerador para FD = 50%.
Pode-se avaliar da Figura 6.7 que mesmo antes da aplicação do evento a frequência
não difere devido ao alto desequilíbrio aplicado. De fato, a frequência da tensão terminal não
é uma grandeza afetada pelo o desequilíbrio do sistema e assim tal proteção opera de maneira
tradicional mesmo em sistemas com altos níveis de desbalanço nas cargas.
Função de Subfrequência (81) - FD = 50%
62
60
Frequência [Hz]
58
56
Frequência Va
Frequência Vb
Frequência Vc
Ajuste Subfrequência
54
52
50
48
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Tempo [s]
Figura 6.7 – Proteção de Subfrequência para FD = 50%.
A atuação da proteção de sobrefrequência foi simulada a partir da aplicação de curto
circuito trifásico no nó intermediário entre o GSD e a barra infinita. Tal evento reduz a
capacidade do GSD de entregar potência ativa ao SDEE e causa a aceleração do seu rotor, o
que é ilustrado na Figura 6.8, que apresenta, adicionalmente, o efeito do desequilíbrio sobre a
mesma fase, para todos os níveis de desequilíbrio considerados.
Na Figura 6.8 é evidenciado que a variação da frequência ocorre de modo discreto,
pois o algoritmo só determina um único valor de frequência por ciclo.
A Figura 6.8 indica que a frequência não é afetada pelo desequilíbrio de carga,
66
fenômeno esperado, uma vez a aceleração do rotor é transferida às ondas de tensão de todas as
fases, independente da existência ou ausência do desequilíbrio
Função de Sobrefrequência (81)
63.5
Freqa FD = 0%
63
Freqa FD = 25%
Freqa FD = 50%
Ajuste de Sobrefrequência
Frequência [Hz]
62.5
62
61.5
61
60.5
60
59.5
0
0.1
0.2
0.3
0.4
0.5
0.6
Tempo [s]
Figura 6.8 – Proteção de Sobrefrequência.
A atuação da proteção de Salto de Vetor (SV) foi análoga a proteção de
sobrefrequência.
A Tabela 6.1 apresenta os tempos de atuação da função Salto de Vetor, associados a
cada FD simulado, onde t0 é o instante de aplicação do evento.
Tabela 6.1 - Tempos de atuação da função de deslocamento de fase do GSD considerando
desequilíbrio de carga.
Curto-circuito
3-ϕ no nó806
FD = 0
FD = 25%
FD = 50%
Tempo de atuação [s] SV
ta =t0+ 0,0187
tb=t0+ 0,0237
tc=t0+ 0,0125
ta =t0+ 0,0187
tb=t0+ 0,0237
tc=t0+ 0,0125
ta =t0+ 0,0187
tb=t0+ 0,0237
tc= t0+ 0,0125
Constata-se da Tabela 6.1 que o tempo de atuação da Proteção de Salto de Vetor não
67
varia de forma significativa com relação à variação do FD, pois as diferenças correspondem
aos instantes discretos de determinação da frequência.
Avaliação da Proteção contra potência reversa (32)
A condição de inversão de fluxo de potência no GSD foi simulada pela variação súbita
do ângulo e módulo da tensão terminal da barra infinita. Este evento pode ser originado de
distúrbios no SDEE ou no sistema de subtransmissão ao qual o GSD se conecta.
A excursão superior apresentada na Figura 6.9 corresponde a potência elétrica em cada
fase, fornecida pelo GSD, para FD = 0%, e a inferior, para FD = 50%.
Na Figura 6.9 se verifica que no caso equilibrado, o consumo de potência do gerador
não causa atuação da proteção, em oposição à condição de desequilíbrio, de onde se conclui
que o desequilíbrio afeta a atuação da proteção contra potência reversa. Deve-se atentar que
convém avaliar a proximidade da atuação da proteção contra potência reversa para eventos
típicos no sistema elétrico em questão.
Potência ativa - FD = 0%
P o tê n c ia A tiv a [M W ]
1.2
1
Pa
Pb
Pc
Ajuste
0.8
0.6
0.4
0.2
0
-0.2
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.45
0.5
Tempo [s]
Potência ativa - FD = 50%
P o tê n c ia A tiv a [M W ]
1.5
Pa
Pb
Pc
Ajuste
1
0.5
0
-0.5
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Tempo [s]
Figura 6.9 – Potência elétrica fornecida pelo GSD. I) FD = 0%. II) FD = 50%.
68
É relevante salientar que os problemas associados à operação motorizada do GS estão
relacionados com danos mecânicos na turbina, e, portanto, uma vez que a potência trifásica é
a mesma em ambos casos, a proteção tem seu desempenho afetado já que seu ajuste só possui
um grau de liberdade.
Avaliação da Proteção de Sobreexcitação (24)
O modelo da proteção de sobreexcitação foi sensibilizado pela simulação de degrau de
15% na referência do regulador de tensão maquinado GSD. Uma vez que a frequência se
mantém aproximadamente constante, a razão V/f supera o ajuste adotado.
A Figura 6.10 ilustra a razão V/f para diferentes FDs, de onde se percebe que a
proteção de sobreexcitação é afetada pelo desequilíbrio na mesma proporção que a tensão
terminal do GSD.
É relevante salientar que o ajuste de pick-up adotado para a função de sobrexcitação é
de 1,05 p.u., de modo que desequilíbrios acentuados podem causar atuação da proteção em
regime permanente para níveis acentuados de desequilíbrio.
Razão V/Hz - FD = 0%.
1.25
V /H z [p u ]
1.2
V/Hz a
1.15
V/Hz c
V/Hz b
1.1
1.05
1
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
1.4
1.6
1.8
2
Tempo [s]
Razão V/Hz - FD = 50%.
1.25
V /H z [p u ]
1.2
V/Hz a
1.15
V/Hz c
1.1
V/Hz b
1.05
1
0.2
0.4
0.6
0.8
1
1.2
Tempo [s]
Figura 6.10 – Proteção de Sobreexcitação (24).
69
Avaliação do desempenho da Proteção de Sobrecorrente de Campo em condições
de desequilíbrio
A proteção contra sobrecorrente de campo, quando utilizada, tem por finalidade atuar
como retaguarda do limitador de sobreexcitação.
A Figura 6.11 apresenta a excursão da corrente de campo (Ifd) para FD = 0% e 50%,
frente ao chaveamento de um banco de reatores de 10 Mvar em derivação no nó em que está
conectada a carga L.
Em condições de desequilíbrio, a corrente de excitação, que compreende a grandeza de
entrada da função avaliada, apresenta comportamento oscilatório, de forma que foi empregada
sua filtragem para utilização na lógica da proteção.
Na Figura 6.11 se pode perceber que o desequilíbrio desloca a corrente de campo no
eixo das coordenadas, porém, apesar de causar a redução do tempo de atuação da proteção, tal
alteração de tempo de atuação não é significativa.
Valor eficaz da corrente de campo do GSD para FD = 0% e 50%.
Corrente [A]
30
25
20
15
Ifd - FD = 0%
10
Ifd - FD = 50%
5
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.35
0.4
Tempo [s]
Valor temporal da corrente de campo do GSD para FD = 0% e 50%.
Corrente [A]
35
30
Ifd - FD = 0%
25
Ifd - FD = 50%.
20
15
10
5
0
0.05
0.1
0.15
0.2
0.25
0.3
Tempo [s]
Figura 6.11 – Proteção contra sobrecorrente de campo.
Avaliação do desempenho da Proteção contra Perda de Excitação (40) em
condições de desequilíbrio
A perda de excitação do GSD foi simulada forçando o valor da tensão no campo Efd à
70
nulidade.
O tempo de atuação da proteção contra perda de excitação é função da trajetória da
impedância aparente frente à perturbação, que depende do montante de potência fornecido
pele GSD previamente ao distúrbio (CARRASCO, 2009). O desequilíbrio altera a potência
entregue por fase do GSD, e, por consequência, a impedância aparente verificada em cada
fase.
A Figura 6.12 ilustra a trajetória das impedâncias aparentes por fase para FD = 50%,
onde se verifica que, neste caso a impedância da fase “b” (trajetória em vermelho) é a única a
excursionar na região de atuação temporizada e o sinal de trip para esta fase é efetuado pela
região temporizada.
A trajetória circular descrita pelas impedâncias é devido à perda de sincronismo
antecipada da máquina, contudo, isto acontece no interior da característica de operação da
função, o que significa que o esquema de proteção detectou a perda de excitação antes que a
máquina perdesse o sincronismo.
Função 40 - FD = 50%.
0.5
0
X [pu]
-0.5
-1
Zona 1
Zona 2
Fase a
Fase b
Fase c
-1.5
-2
-2.5
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
R [pu]
Figura 6.12 – Função de Proteção contra perda de excitação.
A maior parte dos trabalhos que abordam a Função de Perda de Excitação considera o
sistema equilibrado. Entretanto, com base no exposto, para o ajuste e análise de tal função
aplicada à GSDs deve-se representar o sistema de maneira trifásica detalhada e levar em
consideração o desequilíbrio do sistema para análises mais fiéis a realidade.
71
Avaliação do desempenho da Proteção de Sobrecorrente de Sequência Negativa
(46) em condições de desequilíbrio
A proteçãode sobrecorrente de sequência negativa é projetada para identificação de
desequilíbrio em SEE. Neste trabalho foi constatado que para FD superiores a 38%, a corrente
de sequência negativa é superior a 10% do valor nominal do GSD em de regime permanente,
de modo que a atuação da proteção ocorre sem a existência de distúrbios no sistema.
A Figura 6.13 apresenta a variação da corrente negativa em função do FD, assim como
o limite de suportabilidade em regime permanente de I para o GSD em questão.
120
Limite de suportabilidade em regime permanente para corrente de sequência negativa
100
Corrente de sequência negativa em rms
Corrente [A]
80
60
40
20
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Fator de Desequilíbrio (FD)
Figura 6.13 - Correntede sequência negativa em função do FD e limite de š› em regime permanente.
Conclui-se que, em GSDs que dispunham de proteções contra correntes de sequência
negativa a representação do desequilíbrio é relevante tanto na parametrização da função
quanto na possibilidade de existência de dano ao GSD para operação no SDEE.
Avaliação do desempenho da proteção de Sobrecorrente de Neutro (51N) em
condições de desequilíbrio
A proteção de Sobrecorrente de Neutro (51N), de forma análoga a proteção de
sobrecorrente de sequência negativa, é sensível ao desequilíbrio, e tem por objetivo detectar
faltas assimétricas que porventura não sensibilizem a proteção de sobrecorrente de fase.
A Figura 6.14 ilustra o valor eficaz da corrente no neutro (In = 3I0) com relação ao
72
fator de desequilíbrio para diferentes magnitudes de resistências de aterramento.
Função 51N
400
350
Corrente no neutro para Rn = 2 pu
Corrente no neutro para Rn = 1 pu
Corrente no neutro para Rn = 0 pu
Ajuste adotado
Corrente [A]
300
250
200
150
100
50
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Fator de desequilíbrio (FD)
Figura 6.14 - Correnteno neutro em função do FD e ajuste da Função 51N.
Da Figura 6.14 se conclui que a parametrização e análise da proteção de sobrecorrente
de neutro demanda a representação trifásica detalhada, e que para aterramentos de baixa
resistência, o GSD pode ser desconectados em regime permanente para FDs da ordem de
10%, nível de desequilíbrio usual SDEEs.
Avaliação do desempenho da Proteção de Sobretensão de Neutro (59N) em
condições de desequilíbrio
Analogamente a proteção de sobrecorrente de neutro, a proteção de sobretensão de
neutro atua quanto maior for o desbalanço de grandezas no sistema elétrico analisado. Assim,
a parametrização e ajuste da proteção de sobretensão de neutro devem levar em consideração
a análise do valor da resistência aterramento do GS, e às condições de desequilíbrio máximas
em regime permanente.
A Figura 6.15 ilustra a variação do módulo da tensão no neutro do GSD em relação à
variação do FD aplicado, para diferentes magnitudes de resistência de aterramento.
73
Função 59N.
0.7
Tensão no neutro [pu]
0.6
Vn (R = 0 pu)
Vn (R = 0.5 pu)
Vn (R = 1 pu)
Vn (R = 2 pu)
Vn (R = 10 pu)
0.5
0.4
0.3
0.2
0.1
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Fator de desequilíbrio (FD)
Figura 6.15 – Tensão no neutro em função do FD.
O ajuste adotado para a proteção de sobretensão de neutro é igual a 40% da tensão
nominal (0.4Vn). Verificou-se que as variações da tensão de neutro são inferiores às da
corrente de neutro para o mesmo fator de desequilíbrio, de forma que a proteção 59N não atua
em regime permanente para fatores de desequilíbrio típicos. O ajuste adotado é consistente
para detecção de faltas assimétricas simuladas no nó intermediário entre o GSD e a barra
infinita.
A Figura 6.16 apresenta as grandezas de atuação das proteções 46, 51N e 59N para
simulação de curto-circuito monofásico franco no nó intermediário, com a resistência no
neutro do GSD igual a 1 p.u., e para FD = 0% e = 25%.
Verifica-se que o desequilíbrio não altera de forma significativa o desempenho da
atuação das proteções, porém deve ser analisado para determinação dos ajustes.
74
FD = 0%.
1.2
1
Corrente no neutro [pu]
Tensão no neutro [pu]
Corrente de Sequência negativa [pu]
[p u ]
0.8
0.6
0.4
0.2
0
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.3
0.35
0.4
0.45
0.5
Tempo [s]
FD = 25%.
1
Corrente no neutro [pu]
Tensão no neutro [pu]
Corrente de Sequência negativa [pu]
[p u ]
0.8
0.6
0.4
0.2
0
0
0.05
0.1
0.15
0.2
0.25
Tempo [s]
Figura 6.16 – Funções 46, 51N e 59N.
Avaliação da Proteção de Religamento em condições de desequilíbrio
Adicionalmente às proteções do GSD, foi avaliado o comportamento da função de
religamento para três níveis de desequilíbrio. O religador modelado foi alocado na saída da
barra infinita (fonte de tensão ideal no ATP), que é uma aproximação razoável da Subestação
do SD analisado.
Foram ajustadas três zonas do religador, as duas primeiras lentas e a terceira rápida. O
evento simulado consiste da aplicação de curtos-circuitos trifásicos e monofásicos
permanentes no nó central entre a barra infinita e o GSD, de forma que o desligamento do
circuito deve ser efetuado pelo dispositivo.
A Figura 6.19 ilustra os resultados obtidos, de onde se conclui que nestas condições a
função implementada atuou corretamente, ou seja, não foi afetada pelo desequilíbrio.
75
Falta monofásica - FD = 0%
C o r r e n te [A ]
C o r r e n te [A ]
Falta trifásica - FD = 0%
1000
1000
0
-1000
-1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Tempo [s]
Tempo [s]
Falta trifásica - FD = 25%
Falta monofásica - FD = 25%
C o r r e n te [A ]
C o r r e n te [A ]
0
1000
0.8
0.9
1
0.8
0.9
1
0.8
0.9
1
1000
0
-1000
0
-1000
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Tempo [s]
Tempo [s]
Falta trifásica - FD = 50%
Falta monofásica - FD - 50%
C o r r e n te [A ]
C o r r e n te [A ]
0
1000
1000
0
-1000
0
-1000
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
Tempo [s]
0.4
0.5
0.6
0.7
Tempo [s]
Figura 6.19 – Proteção de Religamento.
6.4 Considerações Finais
Neste capítulo foram apresentados os resultados das simulações com o SD operando
em condições equilibradas e em condições de desequilíbrio de carga.
Verificou-se que o desequilíbrio afeta de forma significativa especialmente proteções
que atuam utilizando a informação de desequilíbrio para identificação de faltas assimétricas,
como a proteção de sobrecorrente de neutro (51N), sobretensão residual (59N) e proteção de
sobrecorrente de sequência negativa (46), e as que dispõem de uma única grandeza de ajuste
para decidir o envio do sinal de desligamento do GSD, como a proteção de potência reversa
(32).
As demais proteções não têm redução de desempenho significativa, devido ao aspecto
que as magnitudes das grandezas em condições de falta diferem acentuadamente das
grandezas de regime.
Deve-se considerar, no entanto, a avaliação detalhada da proximidade do limiar de
76
atuação de cada proteção com relação à condição de operação em regime permanente, e a
magnitude de impedâncias de aterramento, que afetam significativamente correntes de falta.
A proteção diferencial se mostrou com desempenho praticamente inalterado com
relação ao desequilíbrio.
O elo fusível não foi avaliado com relação ao desequilíbrio, pois sua análise é
equivalente à função de sobrecorrente. Contudo, o modelo implementado pode ser utilizado
para parametrização e simulação de atuações.
77
7. CONCLUSÕES
O crescimento populacional e o contínuo desenvolvimento tecnológico exigem uma
demanda de energia cada vez maior. Atrelado a tais fatores, a reestruturação do setor elétrico
brasileiro, incentivos governamentais, a procura de geração elétrica através de fontes
alternativas e uma maior conscientização ambiental impulsionaram o desenvolvimento da
Geração Distribuída no Brasil. Basicamente, a GD consiste na implantação de geradores
conectados diretamente nas redes de distribuição e subtransmissão de eletricidade.
Esta modalidade de geração pode trazer vantagens, tais como a redução das perdas na
transmissão, melhoria do perfil de tensão, aumento da confiabilidade do sistema e um baixo
impacto ambiental localizado.
Com a popularização da geração distribuída, é essencial conhecer seus impactos sobre
a dinâmica e operação dos sistemas de potência, assim como, sobre o desempenho das
proteções associadas aos geradores distribuídos. No entanto, em Sistemas de Distribuição é
intrínseca a característica de desequilíbrio de cargas entre as fases e linhas de transmissão não
transpostas.
Nessa condição, a análise de GSs e seu respectivo sistema de proteção é um ponto em
aberto nas pesquisas, o que constitui um desafio do ponto de vista técnico para a certificação
da operação adequada desta nova realidade do SEE. Nesse contexto, evidencia-se o conjunto
de elementos responsável por garantir a operação segura do GS, denominados Relés de
Proteção.
Estudos acerca da filosofia de ajuste, modelagem e implementação dos relés presentes
no GS, em sua grande maioria, levam em conta a operação em redes equilibradas, e pouco se
sabe do comportamento destes operando em condições de desequilíbrio. Nesse contexto, o
principal produto desta análise foi verificar o efeito do desequilíbrio sobre a atuação e
comportamento das funções de proteção presentes em SD com geração disitribuída e o
consequente impacto sobre o GS conectado ao SD, denominado Gerador Síncrono Distribuído
(GSD).
Para tanto, inicialmente está apresentada a revisão bibliográfica acerca de estudos de
curtos-circuitos em sistemas de distribuição, que abordam a teoria de componentes simétricos
e faltas.
Baseado em tal revisão foi realizada a análise comparativa da magnitude dos curtos-
78
circuitos em sistemas de distribuição a partir da abordagem clássica (sistema unifilar-fasorial)
com a relação à abordagem trifásica detalhada.
Verificou-se
que
a
abordagem
unifilar-fasorial
pode
apresentar
diferenças
significativas em curtos-circuitos em nós próximos aos elementos em derivação com
impedâncias reduzidas, que para o caso avaliado, atingiram a ordem de no máximo 35%.
Adicionalmente, é apresentada a revisão bibliográfica acerca da proteção de sistemas
de distribuição na presença de geradores síncronos, onde se descreve as principais funções de
proteção existentes, assim como os ajustes típicos recomendados.
A análise do efeito do desequilíbrio sobre o desempenho das funções de proteção de
geradores síncronos e alimentadores de distribuição foi realizada fundamentada na simulação
temporal a partir de modelos detalhados de relés digitais de proteção.
Os principais resultados obtidos podem ser sintetizados como segue:
A função diferencial (87) não é afetada pelo desequilíbrio de carga, mantendo seu
desempenho para qualquer fator de desequilíbrio;
A função de sobrecorrente (51) é sensível com relação ao desequilíbrio tanto quanto
maior for à relação entre a corrente de carga com a corrente de curto-circuito. Curtos
circuitos que apresentem correntes elevadas, a proteção de sobrecorrente não é
significativamente afetada;
As funções de tensão (27 e 59) são sensíveis com relação ao desequilíbrio, e se deve
atentar que em sistemas desequilibrados, a tensão de cada fase difere em regime
permanente, o que afeta a atuação da proteção;
As proteções de subfrequência, sobrefrequência e salto de vetor mantém o mesmo
desempenho independente do desbalanço de carga;
As proteções de sobreexcitação (24) e de sobrecorrente no campo apresentam diferenças
significativas quando sujeitas a sistemas desequilibrados. Foi verificado, porém, que
tais funções atuaram corretamente para todas as perturbaçãos simuladas;
As proteções de perda de excitação (40) e de potência ativa reversa (32) são diretamente
afetadas pelo carregamento das fases, de forma que a parametrização e análise de tais
funções de proteção demandam a representação detalhada do sistema trifásico
considerando os níveis previstos de desbalanço de carga;
As proteções de corrente de sequência negativa (46), sobrecorrente de neutro (51N) e
sobretensão residual (59N) são as que mais sofrem o efeito do desequilíbrio, pois sua
79
própria atuação é baseada na identificação de grandezas associadas ao desequilíbrio.
Assim, destaca-se que para o ajuste de tais funções, deve-se modelar e analisar os
efeitos do desequilíbrio e avaliar a suportabilidade do GSD na condição
desequilibrada. Salienta-se ainda, que o aterramento do GS é característica
fundamental na avaliação e ajuste de tais funções, especialmente da função 51N, que
para valores elevados de resistência de falta, pode não ser sensibilizada.
Pode-se concluir que os objetivos propostos foram alcançados, uma vez que o presente
trabalho contempla uma biblioteca de funções de proteções de geradores síncronos e de
alimentadores de distribuição, a qual pode ser utilizada em diversas simulações e análises em
aplicativo de capacidade de representação trifásica detalhada.
Tais modelos permitem que futuros usuários possam estender a sua utilização para
sistemas de grande porte, de modo a fazer estudos reais de ajuste e coordenação da proteção
para GSs e de alimentadores de distribuição, de forma a serem gerados resultados mais fiéis à
realidade.
80
REFERÊNCIAS
ABREU, L. V. L de. Análise do Desempenho Dinâmico de Geradores Síncronos
Conectados em Redes de Distribuição de Energia Elétrica. 2005. Dissertação (Mestrado
em Engenharia Elétrica) – UNICAMP, Campinas, SP. Disponível em:<
http://www.bibliotecadigital.unicamp.br/document/?code=vtls000360086>. Acesso em: 201303-26.
ACKERMANN, T.; ANDERSSON, G.; SÖDER, L. Distributed Generation: a definition.
Electric Power Systems Research, Lausanne, Suiça, v.57, n.3, p. 195-204, 2001.
AGOSTINI, M. N. Estudos de aplicação de medição fasorial sincronizada em sistemas de
energia elétrica. Universidade Federal de Santa Catarina - [S.l.]. 2006.
ALMEIDA, A. L. V. Ajuste e Coordenação de Relés de Sobrecorrente. Universidade
Federal do Rio de Janeiro - [S.l.]. 2008.
CAMINHA, A. C. Introdução à Proteção de Sistemas Elétricos. São Paulo: Edgar Blücher
Ltda,1999.
CAMPITELLI, E. M. Análises e Estudos para alocação e ajustes de dispositivos de
Proteção em redes de média tensão de energia elétrica com geração distribuída.
Dissertação de Mestrado - UNESP - [S.l.]. 2007.
CANADIAN/AMERICAN EMTP USER GROUP. Alternative Transients Program Rule
Book.[s.l.]:[s.n.], 1987-1995.
CARDOSO, LUCAS F. Implementação de um banco de simulações em ATP para
avaliação do desempenho de proteções digitais de linhas de transmissão. Trabalho de
conclusão de curso– Curso de Engenharia Elétrica, Universidade Estadual do Oeste do Paraná
– UNIOESTE, Foz do Iguaçu, 2012.
CARRASCO, R. V. Avaliação do Desempenho de Esquemas de Proteção de Máquina
Síncrona Contra Perda de Excitação. Dissertação de Mestrado, COPPE - Universidade
Federal do Rio de Janeiro -. 2009.
CARVALHO, R. C. De. Conexão da Geração Distribuída de Consumidores Industriais
em paralelo com o Sistema de Distribuição e de Transmissão de Concessionárias de
Energia Elétrica. Dissertação de Mestrado, COPPE - Universidade Federal do Rio de Janeiro
- [S.l.]. 2009.
CESAR, R. e SILVA, S. PROTEÇÃO DIFERENCIAL DE GERADORES
SÍNCRONOS : O uso de redes neurais artificiais para identificação e correção da
saturação dos transformadores de corrente. USP - [S.l.]. 2012.
81
COURY, D. V.; OLESKOVICZ, M.; GIOVANINI, R. Proteção digital de sistemas elétricos
de potência: dos relés eletromecânicos aos microprocessados inteligentes. 1. ed. São
Carlos: Universidade de São Paulo, 2007. v. 1.
CONCEIÇÃO, E. N. Da. Modelagem e Simulação da Proteção de Alimentadores de
Distribuição utilizando Softwares tipo EMTP. Dissertação de Mestado - Universidade de
Brasília - 2012.
COPEL. NORMAS TÉCNICAS COPEL - NTC 905100, 2012.
DIAS, M. V. X.; BOROTONI, E. C.; HADDAD, J. Geração Distribuída no Brasil:
oportunidades e barreiras. Revista Brasileira de Energia, Itajubá; v. 11, n. 2, 2005. p. 1-11.
DREHER, J. H.; BUBIAK, E. R. R.; TOYAMA, J.;PAULILLO, G.; MIKAMI L.;
OLIVEIRA, F. J. A. de. Geração Distribuída – Premissas para Operação em Paralelo com o
Sistema de Distribuição Copel em Baixa Tensão. In: SIMPÓSIO BRASILEIRO DE
SISTEMAS ELÉTRICOS, 2010, Belém, Pará. Anais... Belém: [s.n.], 2010.
DUBE, L.; User Guide to MODELS in ATP.[s.l.]:[s.n.], 1996. 164p. p. 1-11.
ELÉTRICA, E.;; RODRIGUES, M. e SILVA, B. Estudo de Técnicas para Cálculo de Fasores.
SNPTEE, n. 1, p. 3151–3152, 2005.
GÓMEZ, J. C. et al. Distributed Generation : Impact on Protections and Power Quality. IEEE
Latin America Transactions, v. 11, n. 1, p. 460–465, 2013.
IEC 60255-3, “Electrical Relays – Part 3: Single input energizing quantity measuring
relays with dependent or independent time”, IEC Standard 60255-3, 1989.
IEEE PC37.230/D4.0, “Draft Guide for Protective Relay Applications to Distribution
Lines”, IEEE Power System Relaying Committee – Relatório Técnico, 2006.
IEEE Std 1001-1988, “Guide for Interfacing Dispersed Storage and Generation Facilities
with Electric Utility Systems”, IEEE/ANSI Standard, 1988.
IEEE Std C37.102-1995, “IEEE Guide for AC Generator Protection”, IEEE Standards
Board - Power System Relaying Committee, 1995.
IEEE PSRC WG 116 Report, “Understanding microprocessor-based technology applied
to relaying”, IEEE Power System Relaying Committee – Relatório Técnico, 2004.
IEEE. Std 1547, “IEEE Standard for Interconnecting Distributed Resources with
Electric Power Systems”, IEEE Standards Coordinating Committee 21, 2003.
IEEE Std C37.112-1996, “IEEE Standard Inverse-Time Characteristic Equations for
Overcurrent Relays”, IEEE Standards Board – Power System Relaying Committee, 1996.
82
GRANVILLE, S.; LINO, P.; RALSTON, F.; BARROSO, L. A.; PEREIRA, M. Recent
advances of sugarcane biomass cogeneration in Brazil. In: IEEE POWER. ENERGY
SOCIETY GENERAL MEETING PES, 2009, Calgary, Canada. Proceedings. . .Piscataway
NJ: IEEE, 2009.
JUNIOR, Paulo S. P., SALGE, Gustavo S., MOREIRA, C. M. Análise da Proteção de
Sobreexcitação para Geradores e Transformadores com testes práticos. . [S.l.]:
Conprove, 2012.
KINDERMAN, G.; Proteção de sistemas elétricos de potência, Vol.1, 2ª ed., Florianópolis,
2005a.
KINDERMAN, G.; Proteção de sistemas elétricos de potência, Vol.2, 2ª ed, Florianópolis,
2005b.
KINDERMAN, G.; Proteção de sistemas elétricos de potência, Vol.3, 2ª ed, Florianópolis,
2008.
LEITÃO, E. de M. P. Religador Automático para Redes de Baixa Tensão. Dissertação de
Mestrado - UFMG - [S.l.]. 2011.
LINO, M. A. B. Proteção da Interconexão de um Gerador Distribuído com o Sistema de
Distribuição de Energia Elétrica. Trabalho de Conclusão de Curso. Escola de Engenharia de
São Carlos - USP - 2007.
LUIZ, C. M. Avaliação dos Impactos da Geração Distribuída para Proteção do Sistema
Elétrico. Dissertação de Mestrado, UFMG, 2012.
MACHADO, R. Q. Aplicação da Transformada Discreta de Fourier Recursiva (TDFR) Na
Filtragem de Componentes Harmônicas de Corrente. Induscon, 2008.
MORO, V. de C. Desenvolvimento de um Algoritmo em C ++ para a Proteção de
Sobrecorrente Temporizada de Geradores em um Relé Digital. Trabalho de Conclusão de
Curso. Escola de Engenharia de São Carlos - USP - [S.l.]. 2010.
NICOLOTTI, Rafaele D., SILVA, Ricardo R. Coutinho, JORGE, T. de M. Avaliação do
Desempenho dos Relés de Proteçao Anti-Ilhamento em um Sistema com Geraçao
Distribuída. 2011.
PARADELO JR., R. de C. Proteção de sobrecorrente em sistemas de distribuição de
energia elétrica através de abordagem probabilística. Dissertação de Mestrado - USP 2006.
PIARDI, A. B. Avaliação da Atuação dos Limitadores do Sistema de Excitação da
Máquina Síncrona em Condições de Desbalanço de Carga. Monografia de Trabalho de
Conclusão de Curso (Graduação) – Curso de Engenharia Elétrica, Universidade Estadual do
Oeste do Paraná – UNIOESTE, Foz do Iguaçu, 2012.
83
PITOMBO, S. O. Proteção Adaptativa Anti-Ilhamento de Geradores Síncronos
Distribuídos. Dissertação de Mestrado - USP - 2010.
PITOMBO, SÉRGIO O., VIEIRA, JOSÉ CARLOS M., OLESKOVICZ, M. Metodologia
Adaptativa para Ajustar a Proteção Anti-Ilhamento de Geradores Síncronos Distribuídos.
XVIII Congresso Brasileiro de Automática, p. 4523–4529, 2010.
SAADAT, H. Power System Analysis. New York, NY: WCB/McGraw-Hill, 1999.
SALIM, R. H. Uma nova abordagem para a análise da estabilidade a pequenas
perturbações em sistemas de distribuição de energia elétrica com geradores síncronos
distribuídos. 2011. Tese (Doutorado em Sistemas Elétricos de Potência) - Escola de
Engenharia de São Carlos, Universidade de São Paulo, São Carlos, 2011.
SALLES, N. J. De. Modelagem e Análise Dinâmica de Sistemas de Proteção de Redes de
Distribuição de Energia Elétrica na Presença de Geradores Síncronos. Dissertação de
Mestrado, Universidade Estadual de Campinas -. 2007.
SANTOS, V. M. Dos. Estudo de Caso de Curto-Circuito em um Sistema Elétrico
Industrial. Trabalho de Conclusão de Curso – Escola de Engenharia de São Carlos,
Universidade de São Paulo USP - 2009.
SEL. Proteção para Interconexão com a Geração Distribuída. 2003.
SEL. MEMÓRIA DE CÁLCULO PARA OS AJUSTES DO. . [S.l: s.n.], 2011.
SOUZA, M. P. de M. G. De. Coordenação da Proteão de um Sistema Elétrico de Potência
Interligado Utilizando Relés de Sobrecorrente e de Distância. Dissertação de Mestrado Universidade Federal do Rio de Janeiro - [S.l.]. 2010.
VELASCO, Juan A. M., ARNEDO, Martín M., ARANDA, F. C. Modeling protective
devices for distribution systems with distributed generation using an emtp-type tool.
Revista chilena de engenharia, v. 18, n. 2, p. 258–273, 2010.
VIEIRA JR., J. C. de M. Detecção de Ilhamento de Geradores Distribuídos: Uma revisão
bibliográfica sobre o tema. Revista Eletrônica de Energia, v. 1, n. 1, p. 3–14, 2011.
VIEIRA, José Carlos M., SALLES, D. Um método Prático para a definiçao dos Ajustes de
Relés baseados em medidas de frequência usados para detecçao de Ilhamento de Geração
Distribuída. Revista Controle & Automação, v. 19, n. 2, p. 199–213, 2008.
84
ANEXO A – PARÂMETROS DOS MODELOS DOS SISTEMAS TESTE
Esta seção do texto se dedica a apresentar os dados do sistema utilizado no
desenvolvimento do Capítulo 2 e de seu equivalente utilizado no desenvolvimento do
Capítulo 6.São apresentados os parâmetros dos elementos que compõem o Sistema de
Distribuição Completo (Linhas de Transmissão, Transformadores, Gerador Síncrono
Distribuído e as cargas de cada barra) e Equivalente (Impedância de Thévenin e Parâmetros da
Fonte Ideal) e as constantes utilizadas nos modelos do Sistema de Excitação e seus
respectivos Limitadores e do Regulador de Velocidade.
Adicionalmente, é apresentado o fluxo de carga denominado “Caso Base”, sobre o qual se
baseiam as variações para análise.
AN.1 Parâmetros do Sistema de Distribuição Completo
A Tabela AN.1 apresenta os dados das linhas de transmissão do sistema de
distribuição. Os valores de impedância estão expressos em p.u./km, com bases =13,8kV e
’ =10MVA.
Tabela AN.1 - Dados das Linhas de Transmissão do Sistema de Distribuição
Barras
292 – 701
292 – 901
292 – 801
901 – 501
901 – 902
901 – 904
902 – 903
904 – 905
905 – 906
906 – 907
906 – 908
908 – 909
R + jX
[p.u./km]
0,01 + j0,02
0,01 + j0,02
0,01 + j0,02
0,02 + j0,03
0,01 + j0,02
0,01 + j0,02
0,01 + j0,02
0,04 + j0,03
0,03 +j0,03
0,03 +j0,03
0,03 +j0,03
0,08 +j0,03
FONTE: ABREU, 2005.
Distância
[km]
0,25
1,75
0,01
0,01
3,65
0,33
4,40
0,55
0,13
0,75
0,3
1,42
Barras
908 – 910
910 – 911
801 – 802
802 – 803
803 – 804
804 – 601
803 – 805
805 – 806
806 – 807
801 – 808
808 – 809
809 – 810
R + jX
[p.u./km]
0,08 + j0,03
0,08 + j0,03
0,01 + j0,02
0,01 + j0,02
0,01 + j0,02
0,00 + j0,00
0,08 + j0,03
0,08 + j0,03
0,08 + j0,03
0,01 + j0,02
0,01 + j0,02
0,01 + j0,02
Distância
[km]
1,76
9,00
2,00
2,30
2,65
0
3,20
1,73
3,55
2,3
0,25
1,55
85
Devido a forma de representação da cargas no aplicativo adotado com capacidade de
representação trifásica detalhada, as cargas foram aproximadas por impedâncias constantes.
Para o seu cálculo desde o fluxo de potência, sua potência foi considerada à tensão nominal
(1p.u.), que resultam nos valores apresentados na Tabela AN.2, representados em MW e
Mvar.
Tabela AN.2 - Dados das Cargas do Sistema de Distribuição
P
[MW]
5,5
0
1,9
0,01
0,02
1,25
0,0
0,04
0,05
Barra
601
602
701
802
803
804
805
806
807
Q
[MW]
0
0,2
0,87
0,01
0,01
0,57
0,0
0,02
0,02
Barra
808
809
810
811
812
813
901
902
903
P
[MW]
0,06
0,11
0,1
0,07
0,03
0,0
0,12
0,06
0,0
Q
[MW]
0,03
0,05
0,05
0,03
0,01
0,0
0,06
0,03
0,0
P
[MW]
0,11
0,59
0,16
0,0
0,08
0,09
0,1
-
Barra
904
905
906
907
908
909
910
-
Q
[MW]
0,05
0,29
0,08
0,0
0,04
0,05
0,05
-
FONTE: ABREU, 2005.
Conforme verificado na Erro! Fonte de referência não encontrada., estão
representados bancos de capacitores em derivação em algumas barras, que possuem os
seguintes valores: El. Derivação 1= 0,3 Mvar; El. Derivação 2= 1,2 Mvar; El. Derivação
3=1,5 Mvar, que também estão representados por impedâncias equivalentes, calculadas à
tensão nominal em seus terminais (1 p.u.).
5
\8 =10MVA):
Os dados dos transformadores de três enrolamentos são os seguintes (’
l
=5
lƒ
=5
lƒ
= 0 p.u. e
l
= 0,0989p.u.,
lƒ
= 0,057p.u. e
transformadores de dois enrolamentos tem os seguintes parâmetros (’
p.u. e
= 0,0565p.u. para o TR1 e 5 = 0p.u. e
lƒ
= 0,174p.u. Os
\8 =10MVA):
= 0,0396p.u. para o TR2.
5 =0
O gerador síncrono distribuído possui os seguintes dados, todos representados em sua
base (’
\8
= 10MVAe
′: = 0,398p.u.;
\8 =13,8kV):
Ÿ
= 0,7s;
′H = 0,3p.u.; ": = 0,254p.u.;
:
= 2,06p.u.;
"H = 0,254p.u.;
O
H
= 2,5p.u.;
= 0,1p.u.; D′: = 7,8s;
D′H = 3s; D": = 0,066s e D"H = 0,075s. A impedância de sequência zero e negativa são,
respectivamente,
= 0,005 + j0,05p.u. e
l
= 0,035 + j0,12p.u.
86
AN.2 Parâmetros do Sistema de Distribuição Equivalente
O sistema de distribuição equivalente é derivado a partir da barra 806, onde os dados
da linha entre a barra 806 e 807 e suas respectivas cargas dessas barra são do sistema
completo.
O restante do sistema está representado por uma impedância equivalente em série com
uma fonte de tensão ideal que representa o barramento infinito. Tais elementos possuem os
seguintes valores (’
\8
= 10MVAe
\8 =13,8kV):
8H
= 0,4743 + j0,287p.u. e
¢
=
0,981p.u com ângulo de -7.57°.Os valores de ângulo e módulo da tensão terminal do
barramento infinito foram obtidos através da aplicação do Teorema de Thévenin, adotando a
conexão com o sistema interligado nacional como referência angular com tensão igual a 1p.u.
A Figura AN.1 ilustra o diagrama do Sistema Equivalente onde estão apresentados os
dados referentes ao fluxo de carga de referência denominado “Caso Base”.
Gerador
Distribuído
807
V = 1 7,94°p.u.
806
V = 0,97 10,1°p.u.
Z807-806
V = 0,981 -7,57°p.u.
Barramento
Infinito
Zth
2,0 - j2,4MVA
-1,2 + j2,8MVA
0,05 + j0,02MVA
C807
0,04 + j0,02MVA
C806
Figura AN.1 - Caso Base para Realização das Análises