2. MODELOS MATEMÁTICOS DE
SISTEMAS
Os Sistemas de Controlo Automático são entidades fundamentais numa sociedade
industrializada.
Para se introduzir os primeiros conceitos considere-se o Exemplo 2.1.
Exemplo 2.1:
A regulação da temperatura dum forno pode-se esquematizar, simplificadamente, pela
Fig.1.1.
referência
+
_
potência
actuação
Interior
do
forno
saída
Elemento de
realimentação
Fig.1.1 – Diagrama de blocos para um sistema de regulação de temperatura de um forno.
A partir deste exemplo apresentam-se alguns conceitos:
•
Sistema: conjunto de componentes que interactuando realizam determinada
função que não é possível de ser realizada por uma das partes isoladamente.
•
Entrada (de referencia) – sinal de entrada do sistema global, uma ou várias.
•
Saída – saída ou resposta do sistema (uma ou várias).
•
Actuação – sinal de controlo, actua directamente no processo.
João Miguel G. P. B. Lima
•
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Sistema em malha aberta: saídas não afectam as entradas não influenciando
assim o desempenho do sistema1.
•
Existência de sensores (modificam as entradas como resultado do valor da saída)
↓
Efeito de realimentação
•
Sistema de malha fechada: saídas têm efeito nas entradas contribuindo para a
regulação do funcionamento do sistema.
O exemplo acabado de apresentar pode ser estendido às mais diversas áreas do
conhecimento encontradas no quotidiano. É de interesse indiscutível a compreensão,
caracterização e modificação do comportamento dos fenómenos físicos e não só, como
por exemplo:
•
Estudo de um canal de comunicação entre um satélite e uma estação terrestre
•
Comportamento de um robot
•
Evolução do consumo de energia eléctrica numa dada cidade
•
Funcionamento de um motor eléctrico
•
Reacção química de um processo industrial
•
Actividade cerebral humana
•
Inflação verificada na economia de determinado país
•
Evolução do número de indivíduos num determinado ecossistema
•
Resposta de um circuito eléctrico montado no laboratório de Análise de
Circuitos
... ... ...
Então, o controlo de sistemas tem aplicação uniformizada a um grande número de áreas
diversas tais como:
o Engª Electrotécnica
1
Será bom?
2
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
o Engª Química
o Eng. Aeronáutica
o Eng. Mecânica
o Eng. Ambiente
o Economia
o Politica
o Ecologia
... ... ...
Os Sistema de Controlo facultam o desenvolvimento formal de técnicas analíticas
unificadas que permitem a Concepção de Sistemas dos quais os anteriormente
apresentados são exemplos.
Assim, podem-se apresentar as seguintes etapas principais para a concepção de um
sistema [1]:
1) Especificação: dizer como se quer que o sistema funcione.
2) Modelação: abstracção da realidade física, extracção da informação relevante,
simplificação da realidade física, utilização da linguagem matemática.
3) Análise: objectivo principal da 1ª e maior parte da disciplina; observação e
descrição do comportamento do sistema.
4) Verificação das especificações: Analisado o sistema, será que ele funciona de
acordo com pretendido?
5) Síntese ou projecto: realização ou modificação do sistema com vista ao
funcionamento deste cumprindo as especificações.
EXEMPLOS DE MODELAÇÃO E REPRESENTAÇÃO MATEMÁTICA DE
SISTEMAS
Para se chegar a uma representação uniformizada de sistemas recorre-se à apresentação de
alguns exemplos de sistemas de diferentes naturezas físicas.
A obtenção de modelos matemáticos de sistemas pode seguir duas abordagens diferentes:
3
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
1. Tradução matemática das leis que governam o sistema.
2. Identificação de sistemas.
Vai ser adoptado o ponto 1, sendo que, as leis que governam cada sistema em estudo
serão apresentadas sem explicação adicional.
Por vezes, o conhecimento que se tem de um dado sistema poderá ser incompleto. Noutros
casos, as leis que o governam poderão conduzir a modelos computacionalmente muito
pesados; ou ainda as suas propriedades poderão variar de um modo imprevisível; em todas
estas situações a abordagem do ponto 1 torna-se inviável, existindo como alternativa aquela
referida no ponto 2. Identificação de sistemas.
Dentro do universo de todos os sistemas que podem ser estudados, esta disciplina debruçase apenas sobre os sistemas lineares e invariantes no tempo (SLIT), estes sistemas,
obviamente, verificam o princípio da linearidade e da invariância no tempo, tal como se
define de seguida.
Princípio da linearidade:
Sejam y1 e y2 as saídas de um dado sistema A quando as entradas são respectivamente x1 e
x2. Então, A diz-se linear sse:
1. a entrada x = x1 + x2 faz com que a saída seja y = y1 + y2 .
2. a entrada kx1 faz com que a saída seja ky1 .
Generalizando, verifica-se o princípio da sobreposição. Seja n um número arbitrário de
entradas x1 , x2 , ... xn para as quais o sistema responde com as respectivas n saídas
y1 ,
y2 , ... yn ; então, se a entrada for X uma combinação linear das n entradas,
X = k1 x1 + k2 x2 + ... + kn xn , a saída será Y uma combinação linear, com os mesmos
coeficientes, das respectivas saídas: Y = k1 y1 + k2 y2 + ... + kn yn .
Invariância no tempo:
Um sistema diz-se invariante no tempo quando a relação entre a entrada e a saída é
independente do instante em que se aplica a entrada.
4
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Seja y ( t ) a saída do sistema quando à entrada é colocado o sinal x ( t ) . Então o sistema
será invariante no tempo sse a entrada atrasada x ( t − t0 ) origina uma saída com igual
atraso: y ( t − t0 ) .
2.1
SISTEMAS ELÉCTRICOS
Relembra-se que os elementos básicos de um circuito (sistema) eléctrico são a resistência, a
bobine e o condensador.
A análise de sistemas eléctricos recorre às leis que governam estes subsistemas
elementares. O estabelecimento de tais leis recorre às grandezas físicas: intensidade de
corrente eléctrica i que percorre o elemento e tensão v aos terminais do mesmo.
Semelhantemente ao que acontece com outras variáveis de sistemas de outras naturezas, a
corrente i e a tensão v designam-se respectivamente por variável através do elemento e
variável entre terminais do elemento.
O conhecimento das leis físicas que governam os elementos básicos permitem estabelecer
as relações no tempo, e as respectivas transformadas de Laplace, conforme se apresentam
na Tab.2.1.
i (t )
R
i (t )
L
i (t )
C
Esquema
v (t )
Relação no
tempo
Transformada
de Laplace
v(t ) = L
v(t ) = Ri ( t )
V ( s ) = RI ( s )
v (t )
v (t )
di (t )
dt
V ( s ) = LsI ( s )
Tab.2.1 – Sistemas eléctricos elementares.
5
i (t ) = C
dv(t )
dt
I ( s ) = CsV ( s )
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
As constantes R, L e C são respectivamente:
R – resistência eléctrica, mede-se em Ohm ( Ω ).
L – indutância da bobine, mede-se em Henry (H).
C – capacidade do condensador, mede-se em Farad (F).
Um sistema eléctrico mais complexo é, por exemplo, obtido interligando os subsistemas
elementares apresentados. Uma análise de tal sistema recorre às leis de Kirchoff:
•
Lei de Kirchoff do equilíbrio das tensões: a soma algébrica das quedas das tensões
ao longo de um circuito fechado é nula.
•
Lei de Kirchoff do equilíbrio das correntes: a soma algébrica das correntes que
atravessam uma superfície fechada é nula.
2.2
SISTEMAS MECÂNICOS
São considerados 2 tipos de sistemas mecânicos consoante o tipo de movimento executado
pelos seus componentes:
•
Sistema mecânico translaccional: os movimentos das componentes fazem-se
segundo um determinado vector.
•
Sistema mecânico rotacional: os movimentos das componentes fazem-se em torno
de um determinado eixo de rotação.
A descrição de sistemas mecânicos recorre às leis de Newton, segundo as quais:
•
Lei fundamental da dinâmica: A soma das forças que actuam num determinado
corpo é directamente proporcional à aceleração que este adquire.
•
Princípio da acção-reacção: Para toda a força de acção aplicada a um corpo
corresponde a uma força de reacção com a mesma direcção e módulo e sentido
contrário.
Como se verá na sequência, as leis acabadas de formular para sistemas mecânicos
translaccionais têm correspondência directa para sistemas mecânicos rotacionais.
6
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
2.2.1 Sistemas mecânicos translaccionais
Paralelamente ao que aconteceu com o estudo de sistemas eléctricos, os sistemas mecânicos
vão ser abordados a partir de sub-sistemas básicos: massa, mola e atrito.
A massa é um elemento que armazena energia cinética. O estabelecimento de um modelo
matemático para este elemento recorre à lei fundamental da dinâmica, anteriormente
apresentada.
Suponha-se que uma dada massa, sujeita a uma força f ( t ) , desloca-se segundo um eixo X
conforme se ilustra na Fig.1.2.
Fig.1.2 – Massa.
Então, a lei fundamental da dinâmica estabelece a expressão(2.1).
f (t ) = M
d 2 x (t )
(2.1)
dt 2
em que:
f a resultante das forças aplicadas, mede-se em Newton [N],
x posição da massa, mede-se em metro [m],
M valor da massa, mede-se em kilograma [Kg].
A mola elástica é um elemento mecânico que armazena energia potencial elástica. De
acordo com a lei de Hooke para uma mola em hélice linear (não deformada) as forças
7
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
aplicadas são directamente proporcionais às variações de comprimento produzidas, a
constante de proporcionalidade, K, denomina-se constante da mola e mede-se em Nm−1 .
A representação esquemática da mola apresenta-se na Fig.1.3.
Fig.1.3 – Mola.
Designando por f a força de restituição da mola, atendendo à lei de Hooke, pode-se
estabelecer o modelo matemático dado pela expressão (2.2).
f ( t ) = − Kx ( t )
(2.2)
O atrito é a força que se opõe ao movimento de 2 corpos pelo facto de estarem em
contacto. A força de atrito gerada em cada corpo tem sentido oposto ao seu movimento
relativamente ao outro corpo.
Nos sistemas mecânicos o atrito é como a resistência nos sistemas eléctricos, elemento
dissipador de energia, inevitável, mas nem sempre desvantajoso.
Trata-se de um elemento não linear podendo-se considerar dividido em 3 tipos: atrito de
Coulomb, atrito estático e atrito viscoso.
Por questões de simplificação apenas se irá considerar o termo linear do atrito viscoso cuja
representação esquemática se apresenta na Fig.1.4.
O modelo matemático para este elemento mecânico é estabelecido sabendo-se que a força
de atrito desenvolvida é proporcional à velocidade de um corpo relativamente ao outro, em
contacto, conforme a expressão (2.3).
f (t ) = −B
dx ( t )
(2.3)
dt
8
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
A constante de proporcionalidade B é conhecida por coeficiente de atrito viscoso e mede-se
em Nsm−1 .
Fig.1.4 – Atrito.
Tal como aconteceu com os sistemas eléctricos, sistemas mecânicos mais complexos
obtêm-se por ligação dos sub-sistemas mais simples, como os acabados de apresentar,
considere-se o Exemplo 2.2.
Exemplo 2.2
Considere-se um veículo de massa M que se desloca por acção de uma força f sobre uma
dada superfície, Fig.1.5. A força é aplicada ao veículo por uma mola interposta de
constante K; entre o veículo e a superfície desenvolve-se uma força de atrito de constante
de proporcionalidade B.
Fig.1.5 – Sistema constituído por massa mola e atrito.
Pretende-se determinar um conjunto de equações que descreve o modelo do sistema; para
tal, é comum representá-lo recorrendo aos símbolos elementares, obtendo-se a Fig.1.6.
9
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Fig.1.6 – Representação do sistema recorrendo aos símbolos.
Tendo em conta o eixo X, seja x2 a posição da massa M e x1 o ponto de aplicação da força
na mola.
A soma das forças aplicadas à massa M é igual a aceleração provocada nesta. Verifica-se
que existem 2 forças aplicadas a esta massa, a força de atrito fa, e a força de restituição da
mola fK dadas pelas expressões (2.4).
fa (t ) = −B
dx2 ( t )
dt
,
f k ( t ) = K ( x1 ( t ) − x2 ( t ) )
Sabendo-se que a aceleração é dada por M
d 2 x (t )
dt 2
(2.4)
, então entrando-se com (2.4) pode-se
estabelecer a equação (2.5).
−B
dx2 ( t )
dt
+ K ( x1 ( t ) − x2 ( t ) ) = M
d 2 x2 ( t )
dt 2
(2.5)
Voltando à Fig.1.6 verifica-se que a lei aplicada teve em conta apenas a posição x2 da
massa, existe contudo outro ponto x1 onde é necessário aplicar a lei do equilíbrio para que o
sistema fique completamente caracterizado.
A partir do princípio da acção-reacção a soma das forças que convergem para um ponto
deve-se anular. Assim, para o ponto x1 a força externa f deve equilibrar-se com a força de
restituição da mola fK dada pelas expressões (2.4), pode-se então estabelecer (2.6).
f ( t ) = K ( x1 ( t ) − x2 ( t ) )
(2.6)
O modelo matemático do sistema em estudo é constituído pelas equações (2.5) e (2.6).
10
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
De forma análoga ao que se obteve para os sistemas eléctricos, trata-se de um sistema de 2
equações diferenciais lineares de 2ª ordem de coeficientes constantes com 2 variáveis x1 e
x2. A perturbação externa (força f) pode ser considerada a entrada do sistema e cada uma,
ou ambas, as variáveis x1 e x2 podem ser tomadas como saídas.
Substituindo (2.6) em (2.5) para que nesta última figure f; passando as saídas (variáveis
dependentes) para o 1º membro e colocando-as por ordem decrescente de diferenciação,
(2.5) e (2.6) resultam no sistema (2.7).
⎧ d 2 x2 ( t )
dx ( t )
+B 2
= f (t )
⎪⎪ M
2
dt
dt
⎨
⎪ x (t ) − x (t ) = 1 f (t )
1
2
⎪⎩
K
(2.7)
O sistema acabado de estudar ainda é suficientemente simples para que seja necessária uma
metodologia de análise mais estruturada. Contudo, essa metodologia existe e pode ser
particularmente útil para a análise de sistemas mais complexos.
As equações diferenciais que modelam um sistema mecânico podem ser determinadas
recorrendo-se à rede ou circuito mecânico.
Uma rede mecânica é uma representação em rede onde nos ramos figuram os elementos
mecânicos; cada nó corresponde os pontos do sistema sujeitos ao mesmo deslocamento.
Voltando ao exemplo em estudo, Fig.1.6, deduz-se que a rede mecânica deverá ter 3 nós:
nó de referência, x1 e x2.
nó de referência: superfície onde se move o veiculo; corresponde ao referencial em relação
ao qual se definem as posições x1 e x2.
x1: posição do ponto de aplicação da força externa.
x2: posição da massa ou posição da ligação entre a massa e a mola.
Desta forma, a rede mecânica correspondente ao sistema da Fig.1.6 apresenta-se na Fig.1.7.
11
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Fig.1.7 – Rede mecânica para o sistema massa, mola e atrito.
Aplicando a lei do equilíbrio das forças a ambos os nós (x1 e x2), obtêm-se as equações
(2.5) e (2.6).
Neste momento convém fazer o ponto da situação. Foram estudados sistemas físicos de
naturezas diferentes, eléctrica e mecânica, para os quais se obtiveram os respectivos
modelos. Embora diferentes, tais modelos têm em comum o facto de serem:
CONJUNTOS DE EQUAÇÕES DIFERENCIAIS LINEARES DE COEFICIENTES CONSTANTES
Pode-se então colocar as seguintes questões:
•
Obtido um modelo para um dado sistema, existirão outros sistemas para os quais
esse modelo seja adequado?
•
Se sim, esse(s) outro(s) sistema(s) poderão ser de uma natureza distinta do sistema
inicial?
Como se irá provar na sequência, as respostas a ambas as questões são positivas! Ou seja,
encontrado um modelo para um dado sistema, é possível encontrar outro sistema, de
natureza diferente, que também admita como seu esse modelo. Neste contexto caminha-se
para uma representação de sistemas acima do nível físico facultando um estudo
uniformizado com todas as vantagens que daí resultam.
Até agora apenas se estudaram sistemas de 2 naturezas distintas: eléctrica e mecânica.
Então, sem perda de generalidade, na abordagem que se segue parte-se de cada modelo de
cada componente elementar mecânica, procurando-se a analogia com alguma componente
elementar eléctrica.
12
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Para se iniciar este estudo considere-se a analogia apresentada na Tab.2.2.
Sistema eléctrico
Sistema mecânico
Corrente
Força
Tab.2.2 – Analogia corrente – força.
Repare-se que ambas as grandezas físicas agem como entradas ou perturbações para os
sistemas respectivos. Tanto a força como a corrente propagam-se através dos elementos,
mecânicos e eléctricos respectivamente, sugerindo semelhante colocação dos respectivos
aparelhos de medida (dinamómetro e amperímetro), em série. Assim, na procura de uma
modelação uniformizada de sistemas assuma-se que o papel da corrente num circuito
eléctrico é análogo ao papel da força num sistema mecânico.
No que toca às potenciais saídas dos sistemas repare-se que a velocidade e a tensão são
grandezas que são medidas em relação a uma referência. Velocidade de um corpo em
relação à terra, tensão num nó de um circuito em relação ao nó de referência; ambas são
grandezas medidas aos terminais dos respectivos elementos, assim pode-se estabelecer a
analogia que se apresenta na Tab.2.3.
Sistema eléctrico
Sistema mecânico
Tensão
Velocidade
Tab.2.3 – Analogia tensão – velocidade.
Recordem-se os modelos do condensador, Tab.2.1, e da massa, expressão (2.1),
respectivamente: i (t ) = C
dv(t )
dt
e
f (t ) = M
dv(t ) †
. Assim, assumindo as analogias
dt
estabelecidas nas Tab.2.2 e Tab.2.3 verifica-se que o modelo de uma massa de valor M é
formalmente idêntico ao modelo de um condensador de valor C = M .
† Cuidado! No modelo da massa, v representa a velocidade e não a tensão, como no modelo do condensador.
13
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Considere-se agora os modelos da bobine, Tab.2.1, e da mola, expressão (2.2),
respectivamente: v(t ) = L
di (t )
e f (t ) = Kx(t ) ‡. Derivando ambos os membros do modelo
dt
da mola obtém-se (2.8).
df ( t )
dt
= Kv ( t )
(2.8)
O modelo da bobine pode ser escrito de acordo com (2.9).
di (t ) 1
= v (t )
dt
L
(2.9)
A observação de (2.8) e (2.9) permite estabelecer que o modelo de uma mola de constante
K é formalmente idêntico ao modelo de uma bobina de indutância L =
1
K
.
Por último, considerem-se os modelos da resistência, Tab.2.1, e do atrito, expressão (2.3),
respectivamente: v(t ) = Ri (t ) e f ( t ) = B
dx ( t )
= Bv ( t ) 2. Reorganizando os termos e
dt
lembrando as analogias das Tab.2.2 e Tab.2.3, conclui-se que o modelo do atrito de
constante B é formalmente idêntico ao modelo de uma resistência de valor R =
1
.
B
A análise acabada de fazer considerou a representação temporal dos modelos, semelhante
estudo poderia ter sido feito a partir das respectivas transformadas de Laplace.
Feitas estas analogias, partindo-se da rede mecânica da Fig.1.7, pode-se determinar a rede
eléctrica análoga que se apresenta da Fig.1.8.
‡ A ausência do sinal negativo relativamente ao que se apresenta na expressão (2.2), deve-se ao facto de agora,
não se estar a considerar a força de restituição da mola mas sim a força externa que se deve aplicar para que a
mola produza um alongamento x.
2 Semelhantemente ao que se passou com a mola, a ausência do sinal negativo deve-se ao facto de agora se
considerar não a força de reacção mas sim a força externa para vencer o atrito. Neste caso v representa a
velocidade e não a tensão.
14
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
L
v2
i (t )
C
R
v1
Fig.1.8 – Rede análoga eléctrica para o sistema mecânico massa, mola e atrito da
Fig.1.7.
De acordo com as analogias estabelecidas, impondo-se aos componentes eléctricos os
seguintes valores (2.10):
1
B
1
L⇔
K
C⇔M
R⇔
(2.10)
obter-se-á um modelo do sistema eléctrico idêntico ao modelo do sistema mecânico do de
partida (2.7). Para se provar tal facto, vai-se analisar o circuito da Fig.1.8 utilizando a lei do
equilíbrio das correntes aplicada aos 2 nós, v2 e v1; obtendo-se as equações (2.11) e (2.12)
respectivamente.
v2 ( t )
R
+C
dv2 ( t )
v1 − v2 = L
dt
= i (t )
(2.11)
di ( t )
(2.12)
dt
Substituindo os valores dos componentes eléctricos de acordo com (2.10), as equações
(2.11) e (2.12) resultam no sistema de equações (2.13).
15
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
⎧
dv2 ( t )
= i (t )
⎪ Bv2 ( t ) + M
⎪
dt
⎨
1 di ( t )
⎪
v1 − v2 =
⎪⎩
K dt
(2.13)
Repare-se agora no sistema (2.7); derivando a 2ª equação e lembrando que a velocidade
v (t ) =
dx ( t )
dt
obtém-se o sistema3 (2.14).
⎧
dv2 ( t )
= f (t )
⎪ Bv2 ( t ) + M
⎪
dt
⎨
1 df ( t )
⎪
v1 − v2 =
⎪⎩
K dt
(2.14)
Tendo em conta as tabelas de analogias Tab.2.2 (corrente - força) e Tab.2.3 (tensão velocidade) conclui-se que os sistemas (2.13) e (2.14) são formalmente idênticos.
Recapitulando, partiu-se de 2 realidades físicas de naturezas distintas obteve-se a
mesma realidade matemática.
2.2.2 Sistemas mecânicos rotacionais
Como referido anteriormente, neste tipo de sistemas as componentes executam movimento
de rotação em torno de um dado eixo.
Existe grande paralelismo relativamente aos sistemas mecânicos translaccionais como se
salienta na Tab.2.4.
3
Para este sistema v representa a velocidade.
16
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Sistemas mecânicos translaccionais
Sistemas mecânicos rotacionais
Força
F
Binário
T
Posição
x
Posição angular
θ
Velocidade
v
Velocidade angular
ω
Aceleração
a
Aceleração angular
α
Tab.2.4 – Analogias nos sistemas mecânicos, translaccional e rotacional.
A lei de Newton utilizada para a análise de sistemas mecânicos rotacionais escreve-se como
(2.15).
T (t ) = J α(t )
(2.15)
em que:
•
T é a resultante dos binários aplicados ao corpo Fig.1.9, mede-se em [N.m],
•
α é a aceleração angular do corpo4, mede-se em [ rad
•
J é o momento de inércia do corpo relativo ao centro de massa, mede-se em
s2
],
[Kg.m2].
Fig.1.9 – Momento de inércia.
Os 3 elementos fundamentais num sistema rotacional são o momento de inércia, a mola e o
atrito.
4
Recordar que: α =
d ω d 2θ
= 2 , sendo ω e θ , a velocidade e aceleração angulares, respectivamente
dt
dt
medidas em rad/s e rad.
17
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Os modelos encontrados para estes elementos seguem de perto os correspondentes para os
sistemas translaccionais, tomando as analogias da Tab.2.4 e considerando que, para estes
sistemas, a massa M é substituída pelo momento de inércia J.
Uma mola Fig.1.10 à qual é aplicada uma torção por acção de um binário T, apresenta um
binário de reacção dado por (2.16), proporcional à diferença das posições angulares dos
seus extremos, a constante de proporcionalidade K designa-se por constante da mola e
mede-se em N .m
rad
.
Fig.1.10 – Mola de torção.
T (t ) = K θ(t )
(2.16)
Por último, o atrito Fig.1.11 que se gera quando 2 corpos estão em contacto provoca um
binário de reacção T, (2.17), que é proporcional à velocidade angular relativa ω de ambos;
a constante de proporcionalidade representa-se por B, designa-se por coeficiente de atrito e
mede-se em N .m.s.rad −1 .
Fig.1.11 – Atrito de rotação.
T (t ) = Bω(t )
(2.17)
Paralelamente às analogias estabelecidas entre as grandezas eléctricas e mecânicas
translaccionais, Tab.2.2 e Tab.2.3, podem-se considerar análogas as grandezas que se
apresentam na Tab.2.5.
18
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Sistema eléctrico
Sistema mecânico rotacional
Corrente
Binário
Tensão
Velocidade angular
Tab.2.5 – Analogias eléctricas - mecânicas rotacionais.
Assumindo as analogias da Tab.2.5, partindo-se dos modelos das componentes elementares
(expressões (2.15), (2.16) e (2.17)) e seguindo-se o raciocínio utilizado nos sistemas
translaccionais, podem-se estabelecer as correspondentes relações de analogia para os
sistemas rotacionais (2.18).
1
B
1
L⇔
K
C⇔J
R⇔
(2.18)
A análise e modelação de sistemas mais complexos recorrem aos modelos acabados de
definir para os elementos fundamentais mais simples. Para se ilustrar tal análise [2]
considere-se o Exemplo 2.3.
Exemplo 2.3
Considere um sistema rotacional, Fig.1.12, composto por 2 cilindros com momentos de
inércia J1 e J2 que se movimentam sobre uma superfície desenvolvendo-se binários de
reacção cujos coeficientes de atrito são B1 e B2 respectivamente; entre os 2 cilindros gera-se
atrito com coeficiente B3. O sistema é posto em movimento por acção de um binário T.
Fig.1.12 – Sistema rotacional do Exemplo 2.3
19
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Pretende-se determinar um conjunto de equações diferenciais que modelem o sistema.
Comece-se por representar a rede mecânica; assim, verifica-se que existe 3 deslocamentos
angulares independentes: θ1 , θ2 , θ3 . Considerando o nó de referência conclui-se que a
rede mecânica tem 4 nós como se esquematiza na Fig.1.13.
Fig.1.13 – Rede mecânica do Exemplo 2.3.
Aplicando a lei do equilíbrio dos binários a cada nó e tendo em conta os modelos
elementares, (expressões (2.15), (2.16) e (2.17)), obtêm-se 3 equações (3 nós) a 3
incógnitas, θ1 , θ2 , θ3 .
•
Nó θ1 :
T = K1 ( θ1 − θ2 )
•
(2.19)
Nó θ2 :
••
•
•
⎛•
⎞
K1 ( θ1 − θ2 ) = J1 θ 2 + B1 θ 2 + B3 ⎜ θ 2 − θ 3 ⎟
⎝
⎠
•
(2.20)
Nó θ3 :
•
••
•
⎛•
⎞
B3 ⎜θ 2 − θ 3 ⎟ = J 2 θ 3 + B2 θ 3 + K 2θ 3
⎝
⎠
(2.21)
Reorganizando5 os termos obtém-se o sistema6 (2.22).
5
Incógnitas no 1º membro e variáveis independentes no 2º membro; da esquerda para a direita os termos
devem-se dispor por ordem crescente dos índices e ordem decrescente da derivação.
6
Como se verá no seguimento da matéria poderá ser útil apresentar a transformada de Laplace deste sistema na
forma matricial.
20
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
⎧ K1θ1 − K1θ2 = T
⎪
••
•
•
⎪
⎨ K1θ1 − J1 θ 2 − ( B1 + B3 ) θ 2 − K1θ2 + B3 θ 3 = 0
⎪ •
••
•
⎪⎩ B3 θ 2 − J 2 θ 3 − ( B3 + B2 ) θ 3 − K 2θ3 = 0
(2.22)
As expressões (2.15) a (2.17) ou alternativamente o sistema (2.22) constituem conjuntos de
equações diferenciais lineares de coeficientes constantes que modelam o sistema mecânico
rotacional em estudo. Conforme já foi provado, existe um sistema eléctrico para o qual este
modelo também serve. Tal sistema eléctrico obtém-se recorrendo às analogias (2.18) e
apresenta-se na Fig.1.14.
v1
i (t )
L1
R3
v2
C1
v3
C2
R1
R2
L2
Fig.1.14 – Rede eléctrica análoga do Exemplo 2.3.
Se se atribuir aos componentes do circuito da Fig.1.14 os valores: L1=1/K1, C1=J1, R1=1/B1,
L2= 1/K2, C2=J2, R2=1/B2 e R3=1/B3; então o modelo que se obtém7 é idêntico ao sistema
(2.22) desde que se considerem análogas as grandezas físicas da Tab.2.5.
2.3
SISTEMAS TÉRMICOS
Os sistemas térmicos são aqueles que trabalham com o fluxo e armazenamento de calor, a
modelação de tais sistemas recorre aos princípios da termodinâmica. Os sistemas térmicos
surgem como sub-sistemas de enúmeros instrumentos de uso comum, como por exemplo:
7
Faça-se! Revisão de Análise de Circuitos.
21
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
forno, frigorífico, sistema de refrigeração de um automóvel, sistema de aquecimento de
água, termómetro, etc.
Os sistemas térmicos são em geral sistemas de parâmetros distribuídos, consequentemente,
as suas discrições matemáticas utilizam de equações diferenciais com derivadas parciais.
Contudo, a abordagem à análise e modelação de sistemas do presente capítulo considera
SLIT de parâmetros concentrados. Assim, o estudo de sistemas térmicos vai considerar
aproximações tais que esses sistemas possam ser modelados por equações diferenciais
lineares de coeficientes constantes, como tem vindo a acontecer com os sistemas
anteriormente estudados. Para que tal hipótese simplificativa possa ser adoptada deve-se
assumir que a temperatura de um corpo é considerada uniforme, esta hipótese é tanto mais
válida quanto menores forem as dimensões do corpo; tratando-se de fluidos (ex: ar, água)
considera-se que se encontram homogeneizados.
O estabelecimento de modelos para este tipo de sistemas resulta da aplicação da lei do
equilíbrio segundo a qual calor adicionado ao sistema é igual ao calor armazenado somado
com o calor dissipado. As variáveis físicas utilizadas na modelação de sistemas térmicos
são:
•
θ : temperatura, mede-se em Kelvin [K] ou graus Celsius8 [ºC].
•
q: taxa de variação de fluxo de calor, mede-se em Joule/segundo=Watt [W].
A temperatura de um dado corpo é uma medida da energia térmica nele armazenado.
Designando-se por qi e qo as taxas de variação de fluxo de calor de entrada e saída
respectivamente, a temperatura θ num determinado instante t, ( t ≥ t0 ) é dada pela
expressão (2.23).
t
1
θ ( t ) = θ ( t0 ) + ∫ qi (τ ) − qo (τ ) dτ
C t0
•
(2.23)
C: designa-se por capacidade térmica e mede-se em [J/ºC].
Derivando ambos os membros de (2.23) pode-se estabelecer (2.24).
8
K = ºC+273.15
22
João Miguel G. P. B. Lima
qi ( t ) − qo ( t ) = C
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
dθ ( t )
(2.24)
dt
A expressão (2.24) relaciona a taxa de variação de temperatura de um corpo com valor
instantâneo do fluxo de calor transmitido ao corpo.
No que se refere ao fluxo de calor entre distintas regiões de um dado corpo podem-se
considerar 3 mecanismos: condução, convexão e radiação. No presente estudo apenas se
vai considerar o fluxo de calor por condução, segundo o qual, o fluxo de calor entre 2
corpos é proporcional à diferença de temperaturas θ1 e θ2 dos mesmos (2.25).
q (t ) =
•
θ1 ( t ) − θ 2 ( t )
(2.25)
R
R: designa-se por resistência térmica do condutor e exprime-se em ºK/W.
As expressões (2.24) e (2.25) constituem os modelos dos elementos básicos de um sistema
térmico, que, juntamente com a lei do equilíbrio anteriormente enunciada permitem
estabelecer os modelos matemáticos de sistemas mais complexos.
Tal como ficou provado na secção 2.2 (recorrendo a exemplos), também para cada modelo
de um dado sistema térmico poder-se-á encontrar um sistema de outra natureza para o qual
tal modelo seja adequado. Desta forma vai-se definir de seguida analogias eléctricas para as
expressões (2.24) e (2.25).
A capacidade térmica de um dado corpo mede a quantidade de calor que esse corpo pode
armazenar; a analogia para com a capacidade eléctrica de um condensador é directa. Assim,
assumindo-se as analogias da Tab.2.6, tendo em conta a relação tensão corrente num
condensador, Tab.2.1, bem como a expressão (2.24) para sistemas térmicos, facilmente se
conclui que as capacidades eléctrica e térmica são análogas podendo-se, inclusivamente,
representar pelo mesmo símbolo.
23
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Sistema eléctrico Sistema térmico
Corrente
Fluxo de calor
Tensão
Temperatura
Tab.2.6 – Analogias eléctricas - térmicas.
Utilizando os mesmos pressupostos mas tendo em atenção a expressão (2.25) conclui-se
que as resistências eléctrica e térmica são análogas e representáveis pelo mesmo símbolo.
A análise de sistemas térmicos pode então recorrer à representação de uma rede térmica em
que cada nó é um ponto do sistema sujeitos a uma mesma temperatura.
Para se ilustrar a modelação de sistemas térmicos considere-se o Exemplo 2.4.
Exemplo 2.4
Considere-se um termómetro de mercúrio comum em que o mercúrio está envolvido pela
protecção de vidro de capacidade e resistência térmicas Cg e Rg, respectivamente. A
capacidade e resistência térmicas do mercúrio são, respectivamente, Cm e Rm.
Num determinado instante o termómetro é submetido a um fonte de calor à temperatura θ 0 ;
pretende-se determinar um conjunto de equações diferenciais que descrevem o sistema.
A análise pretendida pode recorrer à representação da rede térmica (idêntica à análoga
eléctrica). Para tal, considera-se tantos nós quantos os valores independentes de
temperatura, ou seja:
•
θ 0 : temperatura da fonte de calor imposta ao sistema.
•
θ s : temperatura da superfície da protecção de vidro em contacto com o mercúrio.
•
θ m : temperatura do mercúrio.
Sabe-se que a fonte de calor vai aquecer a protecção de vidro condicionada à sua resistência
térmica. O vidro, por sua vez, acumula calor com capacidade térmica C e transmite-o ao
mercúrio. Desta forma, a rede térmica pode-se representar na Fig.1.15.
24
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Rg
+
−
θ0
θs
Cg
Rm
θm
Cm
Fig.1.15 – Rede térmica para o termómetro de mercúrio.
A lei de equilíbrio segundo a qual o fluxo de calor adicionado é igual ao calor armazenado,
(2.24), somado com o calor dissipado, (2.25), permite estabelecer 2 equações para os 2 nós
incógnita: θ s e θ m †.
•
Nó θ s :
θ0 −θ g
Rg
•
•
= Cg θ g +
θ g −θm
(2.26)
Rm
Nó θ m :
θ g −θm
Rm
•
= Cm θ m
(2.27)
Utilizando a convenção anteriormente apresentada5 para arrumação dos termos pode-se
chegar ao sistema de equações diferenciais lineares de coeficientes constantes (2.28).
⎧ • ⎛ 1
1 ⎞
θ
θ
+
⎪Cg θ g + ⎜⎜
⎟⎟θ g − m = 0
Rm Rg
⎪
⎝ Rm Rg ⎠
⎨
•
θg
θm
⎪
−
=0
C
θ
m −
m
⎪
Rm
Rm
⎩
(2.28)
† A analogia para com a lei dos nós é total.
25
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
O sistema de equações (2.28), ou alternativamente as 2 equações de nós que o antecedem,
constitui o modelo do termómetro de mercúrio em estudo.
2.4
SISTEMAS FLUÍDICOS
Esta secção debruça-se sobre sistemas onde há fluxo de líquidos geralmente
incompressíveis. Estes sistemas podem ser encontrados em processos químicos, actuadores,
motores de alimentação de sistemas de manufactura, etc.
As variáveis relevantes no estudo deste tipo de sistemas vão ser apresentadas
considerando-se o processo de enchimento e escoamento de um determinado reservatório,
Fig.1.16; para que se obtenha um modelo linear vai-se assumir que o escoamento do fluído
é laminar.
Fig.1.16 – Enchimento e escoamento de um reservatório.
A observação da Fig.1.16 mostra que este tipo de sistemas é constituído por 2 classes de
elementos fundamentais: reservatórios onde se verifica a acumulação de fluidos, e válvulas
por onde passam os fluidos de entrada, de saída para o exterior do sistema, ou de ligação
entre reservatórios.
Repare-se que sendo os reservatórios indeformáveis, o volume de fluído acumulado num
dado reservatório depende da área A da secção transversal (constante) e da altura h (nível)
do mesmo; assim, a caracterização de sistemas como o que se apresenta deve ter em conta
as seguintes variáveis:
•
h: nível de fluído, mede-se em [m].
•
q: caudal, volume de fluido transferido por unidade de tempo, mede-se em [m3/s].
26
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Pode-se dizer que o caudal acumulado num reservatório é directamente proporcional à
derivada do nível de fluido, (2.29), sendo a constante de proporcionalidade a área A.
q (t ) = A
dh(t )
dt
(2.29)
Na passagem de fluidos por uma válvula de comunicação entre 2 reservatórios com níveis
h1 e h2, dever-se-á ter em conta a resistência hidráulica R definida como a variação na
diferença de níveis que conduz a uma variação unitária de caudal. Assim, pode-se dizer que
o fluxo através duma válvula de resistência R que liga 2 reservatórios; é directamente
proporcional à diferença de níveis e inversamente proporcional à resistência R, (2.30). A
resistência R mede-se em s/m2.
q (t ) =
h(t )
R
(2.30)
Para este tipo de sistemas deve-se ter em conta que o fluido que entra num reservatório é
igual ao fluido que sai somado com o fluido acumulado. Sendo que, o estabelecimento de
modelos para este tipo de sistemas resulta da aplicação desta lei conjuntamente com as
relações (2.29) e (2.30).
Tal como, recorrendo a exemplos, ficou provado na secção 2.2, também para cada modelo
de um dado sistema fluidico poder-se-á encontrar um sistema de outra natureza para o qual
tal modelo seja adequado. Desta forma vai-se definir de seguida analogias eléctricas9 para
as expressões (2.29) e (2.30).
Repare-se que a carga eléctrica acumulada num condensador tem correspondência para
com o fluido acumulado num reservatório. Assim, pode-se considerar que a capacidade
eléctrica C de um condensador é análoga à área A da secção transversal de um reservatório;
semelhante consideração pode-se tomar no que respeita à resistência eléctrica e a
resistência hidráulica de uma válvula.
Assim, assumindo-se as analogias da Tab.2.7, tendo em conta a relação tensão corrente
num condensador, Tab.2.1, bem como a expressão (2.29) para sistemas fluídicos,
9
Lembre-se que muitos textos introdutórios à electricidade recorrem a analogias fluidicas para definir os
conceitos.
27
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
facilmente se conclui que a capacidade eléctrica é análoga à área A da secção transversal de
um recipiente.
Sistema eléctrico Sistema fluidito
Corrente
Caudal
Tensão
Altura
Tab.2.7 – Analogias eléctricas - fluidicas.
Utilizando os mesmos pressupostos mas tendo em atenção a expressão (2.30) conclui-se
que as resistências eléctrica e fluidica são análogas e representáveis pelo mesmo símbolo.
A análise de sistemas fluidicos pode então recorrer à representação de uma rede fluidica em
que cada nó é um ponto do sistema sujeitos a um mesmo nível.
Para se ilustrar a modelação de sistemas fluidicos considere-se o Exemplo 2.5.
Exemplo 2.5
Considere o sistema fluídico da Fig.1.17.
Fig.1.17 – Sistema fluidico do Exemplo 2.5
Pretende-se determinar as equações diferenciais que descrevem o sistema.
As incógnitas são os níveis dos 2 reservatórios: h1 e h2. Então a rede fluidica/análoga
eléctrica tem 2 nós.
A análise do sistema pode ser feita directamente aplicando a lei do equilíbrio a cada
reservatório utilizando-se o esquema e respectivos parâmetros da Fig.1.17, ou recorrendo à
rede fluidica/análoga eléctrica.
28
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Nas condições do problema, a rede fluidica/análoga eléctrica está representada na Fig.1.18.
R1
h1 ≡ v1
qi ≡ i
A1=C1
h2 ≡ v2
A2=C2
R2
Fig.1.18 – Rede fluidica/análoga eléctrica do Exemplo 2.5
As 2 equações linearmente independentes obtêm-se aplicando a lei do equilíbrio a cada nó.
Utilizando os parâmetros do sistema fluidico obtêm-se as expressões (2.31) e (2.32).
•
Nó h1 :
qi =
•
•
h1 − h2
+ A1 h1
R1
(2.31)
Nó h2 :
•
h1 − h2 h2
=
+ A2 h 2
R1
R2
(2.32)
Utilizando a convenção anteriormente apresentada5 para arrumação dos termos pode-se
chegar ao sistema de equações diferenciais lineares de coeficientes constantes (2.33).
1
1
⎧ •
⎪ A1 h 1 + R h1 − R h2 = qi
1
1
⎪
⎨
•
⎪− 1 h + A h + ⎛ 1 + 1 ⎞ h = 0
⎜
⎟ 2
2 2
⎪⎩ R1 1
⎝ R1 R2 ⎠
(2.33)
O sistema de equações (2.33), ou alternativamente as 2 equações de nós que o antecedem,
constitui o modelo do sistema em estudo.
29
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Analogamente, pode-se aplicar a lei dos nós à rede da Fig.1.18 com os parâmetros
eléctricos; tendo em conta a tabela de analogias (Tab.2.7) obtém-se7 o modelo (2.33).
2.5
FUNÇÃO DE TRANSFERÊNCIA
Os exemplos estudados até agora, constituem uma pequena amostra da enorme variedade
de situações que podem ser modeladas na perspectiva da teoria dos sistemas, objecto de
estudo da presente disciplina. Tais exemplos debruçaram-se sobre sistemas de natureza
distinta sendo a sua dinâmica definida em tempo contínuo (t).
As secções anteriores tiveram como objectivo a definição de uma representação
uniformizada que possibilite a análise e controlo de sistemas independentemente da sua
natureza. Nesta perspectiva, pode-se generalizar que os SLIT são representados por:
SISTEMAS DE EQUAÇÕES DIFERENCIAIS DE COEFICIENTES CONSTANTES
Assim sendo, a forma uniformizada encontrada para representação de SLIT vai ser utilizada
independentemente da natureza do sistema que a originou. Deste modo, (e sem perda de
generalidade) considere-se um sistema com uma entrada r e uma saída y esquematizado na
Fig.1.19.
r
SISTEMA
y
Fig.1.19 – Sistema com entrada r e saída y.
Sem perda de generalidade, considere-se que o sistema pode ser caracterizado pela equação
diferencial (2.34).
••
•
••
•
a0 y (t ) ( n ) + a1 y (t )( n −1) + ... + an − 2 y (t ) + an −1 y (t ) + an y (t ) = ...
b0 r (t )
(m)
+ b1r (t )
( m −1)
+ ... + bm − 2 r (t ) + bm −1 r (t ) + bm r (t )
30
(2.34)
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Calculando-se a transformada de Laplace de ambos os membros tem-se (2.35).
a0 s nY ( s ) + a1s n −1Y ( s ) + ... + an − 2 s 2Y ( s ) + an −1sY ( s ) + anY ( s ) =
= b0 s m R( s ) + b1s m −1 R ( s ) + ... + bm − 2 s 2 R ( s ) + bm −1sR ( s ) + bm R ( s )
(2.35)
Nesta fase introduz-se a definição de Função de transferência.
A função de transferência de um SLIT contínuo é a razão entre a transformada de Laplace
da saída e a transformada de Laplace da entrada, considerando-se a hipótese de condições
iniciais nulas.
Para a situação em estudo define-se a função de transferência G ( s ) =
Y (s)
; entrando-se
R( s)
com a expressão (2.35) obtém-se (2.36).
G (s) =
Y ( s ) b0 s m + b1s m −1 + ... + bm − 2 s 2 + bm −1s + bm
=
R( s ) a0 s n + a1s n −1 + ... + an − 2 s 2 + an −1s + an
(2.36)
Esta forma uniformizada de representação de sistemas permite que sejam feitas algumas
considerações:
•
Não depende da evolução da entrada do sistema nem das suas condições iniciais.
•
Trata-se de uma função racional complexa de variável complexa.
•
Tal como a representação por equações diferenciais, caracteriza completamente um
SLIT do ponto de vista de entrada-saída.
•
À ordem n do termo de maior grau do denominador D(s) denomina-se ordem do
SLIT.
•
Se para um dado sistema a função de transferência for desconhecida, esta poderá ser
avaliada perturbando o sistema com uma entrada conhecida e estudando a
respectiva saída. A razão das transformadas de Laplace da entrada e da saída
corresponde à função de transferência.
Para se ilustrar a determinação de uma função de transferência, considere-se o Exemplo
2.6.
31
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Exemplo 2.6
Considere o sistema fluidico do Exemplo 2.5, Fig.1.17. Assumindo como entrada o caudal
qi e como saída o nível de fluido no reservatório 2, pretende-se determinar a função de
transferência respectiva.
Na secção 2.4 determinou-se a descrição matemática do sistema em causa chegando-se às
equações (2.31) e (2.32), ou alternativamente, ao sistema de equações (2.33).
Pretende-se agora determinar a razão entre as transformadas de Laplace da entrada qi e da
saída h2: G ( s ) =
H 2 ( s)
.
Qi ( s )
Na resolução do Exemplo 2.5 chegou-se à conclusão de que o modelo para o sistema em
estudo consiste num sistema de 2 equações a duas incógnitas (h1 e h2); por se tratarem de
equações linearmente independentes, tal sistema é possível e determinado. A função de
transferência que agora se pede resulta da solução do sistema10 (2.33), tomada a
transformada de Laplace de ambas as equações, em ordem à variável h2.
A partir de (2.33) tem-se:
1
1
⎧
⎪ A1sH1 ( s ) + R H1 ( s ) − R H 2 ( s ) = Qi ( s )
1
1
⎪
⎨
⎪− 1 H ( s ) + A sH ( s ) + ⎛ 1 + 1 ⎞ H ( s ) = 0
⎜
⎟ 2
2
2
⎪⎩ R1 1
⎝ R1 R2 ⎠
(2.37)
O sistema (2.37) pode ser escrito na forma matricial:
1
⎡
⎢ A1s + R
1
⎢
1
⎢
⎢ −R
1
⎣
⎤
⎥ ⎡ H ( s ) ⎤ ⎡Q s ⎤
⎥ ⎢ 1 ⎥ = ⎢ i ( )⎥
1
1 ⎥ H (s)
0 ⎦
A2 s + + ⎥ ⎣ 2 ⎦ ⎣
R1 R2 ⎦
−
1
R1
(2.38)
Desta forma a solução11 H 2 ( s ) é dada pelo cociente de determinantes (2.39).
10
Agora percebe-se a vantagem da regra para organização dos termos5 que conduziu ao sistema (2.33),
relativamente às equações (2.31) e (2.32).
11
A resolução do sistema pode recorrer a qualquer outro método.
32
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
A1s +
−
H2 ( s) =
Qi ( s )
1
R1
1
A1s +
R1
−
1
R1
1
R1
0
(2.39)
1
−
R1
A2 s +
1
1
+
R1 R2
Feitas as contas conclui-se (2.40).
G (s) =
H2 ( s)
R2
=
2
Qi ( s ) A1 A2 R1 R2 s + ( A1 R2 + A1 R1 + A2 R2 ) s + 1
(2.40)
A observação do grau do polinómio do denominador de G2 ( s ) permite concluir que se trata
do um sistema de 2ª ordem.
Seja uma função de transferência genérica G ( s ) =
N (s)
. Então, D(s) denomina-se
D (s)
polinómio característico. As soluções complexas da equação D ( s ) = 0 denominam-se
pólos do sistema e as soluções complexas de N ( s ) = 0 denominam-se zeros do sistema.
Como se verá na sequência o posicionamento no plano complexo de tais soluções
condiciona o comportamento do sistema.
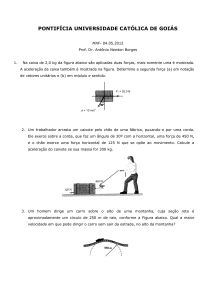
2.6
SISTEMAS ELECTROMECÂNICOS
O sistema electromecânico que vai ser estudado nesta secção é o motor DC. Tal sistema
pode ser visto como um amplificador de potência tal que, a potência necessária para excitar
o circuito de campo é inferior à potência do circuito de armadura. Desta forma, este motor
serve para ceder energia a uma carga mecânica, utilizando para esse fim a conversão de
energia eléctrica em energia mecânica rotacional.
33
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
As características deste tipo de motores faz com que sejam utilizados numa vasta gama de
aplicações tais como: manipuladores, passadeiras para transporte de mercadorias,
equipamentos informáticos tais como comandos de discos ou impressoras, máquinas
ferramenta controladas numericamente etc.
A Fig.1.20 apresenta o esquema electromecânico do motor DC [4].
Va
ia
Vb
θ
J, B
if
Fig.1.20 – Motor DC.
Este sistema é constituído por 2 sub-sistemas fundamentais, circuito de campo e circuito de
armadura, definindo-se 2 modos de funcionamento:
•
Mantendo a corrente de campo if constante e regulando a tensão aplicada à
armadura.
•
Mantendo a corrente de armadura ia constante e regulando a tensão aplicada ao
campo.
O fluxo induzido na armadura é proporcional à corrente de campo (2.41) :
Φ (t ) = k f i f (t )
(2.41)
34
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
O binário desenvolvido pelo motor relaciona-se com a corrente da armadura e com o fluxo
de acordo com (2.42).
Tm ( t ) = k1Φ ( t ) ia ( t )
(2.42)
De (2.41) e (2.42) conclui-se que:
Tm ( t ) = k1k f i f ( t ) ia ( t )
(2.43)
A última expressão (2.43) mostra que para que haja uma relação de linearidade deve
verificar-se uma das duas correntes ( i f ( t )
ou
ia ( t ) ) constante, conduzindo
alternativamente a cada modo de funcionamento anteriormente mencionado.
Considere-se o controlo por corrente de campo implicando constante a corrente de
armadura ia ( t ) = I a ; então, o binário é proporcional à corrente de campo, (2.44),
designando-se por constante do motor km = k1k f I a .
Tm ( t ) = kmi f ( t )
(2.44)
A expressão (2.44) relaciona 2 grandezas físicas de naturezas diferentes: corrente do
circuito de campo e binário desenvolvido pelo motor.
Tratando-se de um controlo por corrente de campo, pretende-se finalmente uma relação12
entre a tensão aplicada ao circuito de campo Vf e a posição angular da carga mecânica θ .
Aplicando a lei do equilíbrio das tensões ao circuito de campo obtém-se, em termos da
transformada de Laplace, (2.45).
V f ( s ) = R f I f ( s ) + L f sI f ( s )
(2.45)
Do lado do circuito da armadura pode-se dizer que o binário do motor é transferido para a
carga13 Tm=TL . Atendendo aos parâmetros (J e B) da carga obtém-se (2.46).
12
Função de transferência.
13
Corresponde a uma aproximação pois, para além do binário da carga, há a considerar binários devido a
perturbações externas que na presente análise se consideram desprezáveis.
35
João Miguel G. P. B. Lima
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Tm ( s ) = Js 2θ ( s ) + Bsθ ( s )
(2.46)
Eliminando Tm em (2.44) e (2.46) obtém-se (2.47).
Js 2θ ( s ) + Bsθ ( s ) = km I f ( s )
(2.47)
Resolvendo (2.45) em ordem a If e substituindo em (2.47) pode-se chegar à função de
transferência G(s).
G (s) =
θ (s)
Vf ( s)
km
=
JL f
R
B ⎞⎛
⎛
s⎜ s + ⎟⎜ s + f
J ⎠ ⎜⎝
Lf
⎝
(2.48)
⎞
⎟⎟
⎠
Considere-se agora o controlo pela armadura. Nestas circunstâncias é a corrente de
campo que se mantém constante, i f ( t ) = I f ; a expressão (2.43) pode ser escrita na forma
(2.49).
Tm ( t ) = kmia ( t ) ;
km = k1k f I f
(2.49)
Pretende-se determinar uma relação12 entre a tensão de armadura Va e a posição angular θ
da carga mecânica.
Nestas circunstâncias o fluxo (2.41), constante, induz na armadura uma força
contra-electromotriz Vb que é proporcional à velocidade angular da carga (2.50).
vb ( t ) = kb
d
θ (t )
dt
(2.50)
Aplicando a lei do equilíbrio das tensões ao circuito da armadura obtém-se (2.51).
va ( t ) = Ra ia ( t ) + La
d
ia ( t ) + vb ( t )
dt
(2.51)
Nesta última equação substituindo vb pela definição (2.50) e calculando a transformada de
Laplace obtém-se I a ( s ) dada por (2.52).
36
João Miguel G. P. B. Lima
Ia ( s ) =
Capítulo 2 MODELOS MATEMÁTICOS DE SISTEMAS
Va ( s ) − kb sθ ( s )
Ra + La s
(2.52)
Considere-se agora a transformada de Laplace de (2.49): Tm ( s ) = km I a ( s ) . Substituindo Tm
por (2.46) e I a por (2.52) obtém-se a função de transferência G(s) pretendida.
G (s) =
θ (s)
Va ( s )
=
km
s ⎡⎣( Ra + La s )( B + Js ) + kb km ⎤⎦
(2.53)
Referências
[1]
M. I. Ribeiro, Análise de Sistemas Lineares, IST Press.
[2]
John J. D'Azzo e Constantine H. Houpis, Linear Control Systems Analysis and
Design, 3ª ed., McGraw-Hill, 1988.
[3]
J. Martins de Carvalho, Dynamical Systems and Automatic Control, Prentice Hall,
1993.
[4]
Richard C. Dorf and Robert H. Bishop, Modern Control Systems, 7ª ed., Addison
Wesley, 1995.
[5]
Katsuhiko Ogata, Modern Control Engineering, 2ª ed., Prentice-Hall, 1990.
[6]
Chi-Tsong Chen, Analog and Digital Control Systems Design: Transfer-function,
state-space and algebraic methods, Saunders College Publishing, 1993.
[7]
Bahram Shahian, Control Systems Design using Matlab, Prentice-Hall, 1993.
[8]
Duane C. Hanselman e Benjamin Kuo, Matlab Tools for Control Systems Analysis
and Design, Prentice-Hall, 1995.
37