ADL 04
2.5 Funções de Transferência de Sistemas Mecânicos em Translação.
Os sistemas mecânicos, como os circuitos elétricos, possuem três componentes passivos, lineares:
Mola e a massa são elementos armazenadores de energia;
Amortecedor viscoso dissipa energia.
K,fv e M são chamadas, respectivamente, de constante de mola, coeficiente de atrito viscoso e massa.
Analogias entre os sistemas elétricos e mecânicos:
- força mecânica é análoga à tensão elétrica
- velocidade mecânica é análoga à corrente elétrica
Por comparação das tabelas mecânica e elétrica:
- mola é análoga ao capacitor,
- amortecimento viscoso é análogo ao resistor
- massa é análoga ao indutor.
Função de transferência — uma equação de movimento
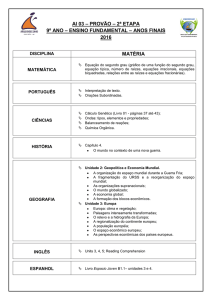
Problema Obter a função de transferência, X(s)/F(s),
Solução: diagrama de corpo livre:
Coloque na massa todas as forças sentidas por ela..
Lei de Newton para somar e igualar a zero todas as forças mostradas sobre a massa:
Entrada: f(t) , Saída:x(t) , Não existem V. Intermediárias.
(2.108)
Transformada de Laplace, supondo nulas todas as condições iniciais,
(2.109)
(2.110)
Resolvendo para obter a função de transferência resulta
(2.111)
Paralelo entre sistemas mecânicos e circuitos elétricos:
para a mola
(2.112)
para o amortecedor viscoso
(2.113)
para a massa
(2.114)
Definindo impedância para componentes mecânicos
(2.115)
Observe que a Eq. (2.110) está sob a forma,
[ Soma de impedâncias] X(s) = [ Soma de forças aplicadas ]
que é semelhante, mas não o análogo, a uma equação de malha.
•Sistemas mecânicos são semelhantes a circuitos elétricos com diversas malhas e diversos nós
(circuitos multimalhas e multinós).
•Em sistemas mecânicos, o número necessário de equações de movimento é igual ao número de
movimentos linearmente independentes. (ou graus de liberdade)
• A independência linear implica que um ponto de movimento em um sistema em movimento pode
continuar a se mover mesmo se todos os outros pontos forem mantidos parados.
•Para tratar um problema assim, desenhamos o diagrama de corpo livre para cada um dos pontos
e, em seguida, usamos a superposição.
Função de transferência — dois graus de liberdade
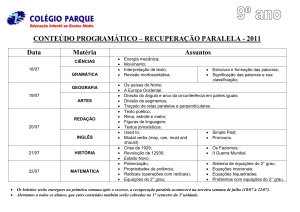
Problema: Obter a função de transferência, X2(s)/F(s), para o sistema abaixo
Solução: O sistema tem dois graus de liberdade, uma vez que cada uma das massas pode se mover na
horizontal enquanto a outra permanece parada.
=> duas equações de movimento para descrever o sistema
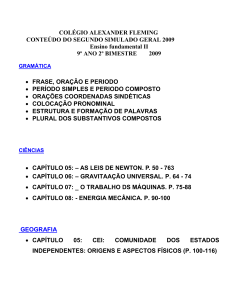
Se mantivermos M2 parada e deslocarmos M1 para a direita, veremos as forças mostradas na Fig. 2.18(a).
Se mantivermos M1, parada e deslocarmos M2 para a direita, veremos as forças mostradas na Fig. 2.18(b).
A força total sobre M1 é a superposição, como mostrado na Fig. 2.18(c).
Analogamente com relação a M2, temos a Fig. 2.19.
A transformada de Laplace das equações de movimento pode ser escrita, agora, a partir das Figs. 2.18(c) e
2.19(c) como:
(2.118a)
(2.118b)
Se a entrada é F(s), a saída X2(s) e X1(s) é uma variável Intermediária, a Função de transferência.
X2(s)/F(s), é:
(2.119)
Onde:
Observe novamente, nas Eqs. (2.118), que a forma geral das equações é semelhante às equações elétricas
de malha:
(2.120a)
(2.120b)
Equações de movimento por inspeção
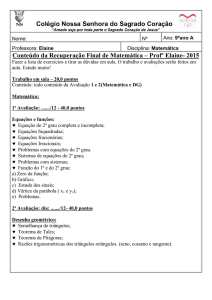
Problema Escrever, mas não resolver, as equações de movimento da estrutura mecânica
Solução O sistema possui três graus de liberdade, uma vez que cada uma das três massas pode se
movimentar independentemente enquanto as outras permanecem paradas.
Para M1
(2.121)
De modo semelhante, para M2 e M3, respectivamente,
(2.122)
(2.123)
M1 possui duas molas, dois amortecedores viscosos e a massa associada ao seu movimento. Há uma
mola entre M1 e M2 e um amortecedor viscoso entre M1 e M3 Assim, usando a Eq. (2.121),
(2.124)
De modo semelhante, usando a Eq. (2.122) para M2,
(2.125)
e usando a Eq. (2.123) para M3
(2.126)
As três equações acima são as equações de movimento. Podemos resolvê-las para obter qualquer um dos
deslocamentos, X1(s), X2(s) ou X3 (s) ou a função de transferência.