O COMPORTAMENTO DE RECEPTORES GPS DE DIFERENTES PRECISÕES, EM
LEVANTAMENTOS FEITOS EM MESMA ÁREA, ÉPOCA E TRAJETO
Flamarion Dresch Pereira1,2*, Maurício de Souza1,3, Ricardo Dal’Agnol da Silva1,4, Aline Bernarda Debastiani1,4,
Mosar Faria Botelho5
1
Acadêmico(a) do curso de Engenharia Florestal da Universidade Tecnológica Federal do Paraná, Campus Dois
Vizinhos, Paraná
2
Bolsista PROREC (Entidade Financiadora da Bolsa UTFPR – Brasil), Email: [email protected]
3
Bolsista PIBIT (Entidade Financiadora da Bolsa CNPq), Email: [email protected]
4
Bolsista PIBIC (Entidade Financiadora da Bolsa Fundação Araucária), Email: [email protected],
[email protected]
5
Professor-Orientador da Universidade Tecnológica Federal do Paraná, Campus Dois Vizinhos, Paraná, Doutor em
Ciências Geodésicas pela UFPR.
*Autor para correspondência
Resumo: Com a exigência do DECRETO 6.514, DE 22 DE JULHO DE 2008, vários profissionais sem atualização e
atuação na área, buscam aproveitar-se da oportunidade e realizam levantamentos com equipamentos inadequados
para o processo. O objetivo desse trabalho foi verificar o comportamento de receptores GPS de diferentes precisões,
em levantamentos feitos em mesma área, época e trajeto. Para isso foram utilizados três receptores para a captura das
coordenadas e posteriormente realizou-se a análise dos dados. Um dos receptores GPS utilizados na coleta de dados
foi o receptor L1 Bastão que possui uma precisão centimétrica onde seu bastão estava 2.0m de altura em relação ao
chão, outro receptor GPS utilizado foi o L1 Mochila, também de precisão centimétrica e a mochila estava a 1,30m de
altura do chão, ambos esses com uma boa precisão, o último receptor GPS que fez parte da coleta de dados foi o
Navegador de baixa precisão, ou precisão métrica (8 metros em média, utilizados por muitos profissionais da área
para cadastros no Sistema Estadual de Implantação de Áreas de Preservação Permanente e de Reserva Legal
(SISLEG)). Depois de feito o levantamento da área, foram descarregadas as coordenadas para o computador e com a
ajuda de softwares foram feitas imagem altimétricas tridimensionais do relevo em questão e curvas de nível. Diante
da análise qualitativa dos dados, verificou-se que com as portadoras L1 a representação do relevo mensurado ficou
semelhante ao real, já o receptor GPS Navegador, por sua vez, capturou dados do relevo sem fidedignidade.
Palavras-chave: receptor GPS, Acurácia planimétrica, Acurácia Altimétrica, Interpolação
Introdução
Com a exigência do DECRETO 6.514, DE 22 DE JULHO DE 2008, vários profissionais sem atualização e
atuação na área, buscam aproveitar-se da oportunidade e realizam levantamentos com equipamentos inadequados
para o processo. Esse fato levanta uma questão: o proprietário rural ou urbano está consciente da aplicabilidade dos
sistemas GPS?
As ações e os projetos envolvendo temas que agregam informações relacionadas com a superfície do terreno
devem ser apoiados por uma base geodésica e por uma cartografia de qualidade. A partir do século XX com o
advento das técnicas empregadas em Geodésia e Cartografia, bem como análises matemáticas e estatísticas, atreladas
à evolução dos computadores, foi possível mapear amplas áreas com elevado grau de precisão (milímetros). O
Global Positioning System (GPS) é um exemplo de um componente eficaz para a formação de uma base geométrica
uniforme.
Diante da elevada importância do sistema GPS nos dias atuais, torna-se necessária à realização de estudos
que permitam investigar o comportamento dos levantamentos efetuados com diferentes receptores (fabricantes),
diferentes técnicas de posicionamento empregadas, sob diferentes épocas e constelações (satélites) e diferentes áreas
(relevos), com o intuito de integrar o maior número de informações possíveis, visando despertar nos profissionais
que utilizam o sistema o interesse não apenas na aquisição de informações para um posicionamento preciso, mas
também na sua integração, permitindo a geração de sub-produtos de qualidade, como por exemplo, os modelos
tridimensionais de superfícies. (SOUZA, 2002).
Neste artigo buscou-se meios de integrar dados provenientes de levantamentos com receptores GPS obtidos
nas mesmas épocas e por diferentes equipamentos, evidenciando qual destes é recomendado para a realização de
atividades profissionais na representação do relevo.
Material e Métodos
Com a finalidade de avaliar a qualidade da interpolação usando diferentes equipamentos, a metodologia foi
dividida em etapas, que são: coleta de dados, geração de uma grade pelo método convencional de interpolação
krigagem e avaliação do desempenho da interpolação de diferentes precisões, ainda identificar e comparar as
diferenças entre as técnicas empregadas.
Será utilizada como contra-partida para o levantamento planialtimétrico de verificação um receptor GPS com
portadora L1 próxima a base (devido a proximidade da base 500m, possui uma precisão muito boa) usando um
bastão com 2.0m com rigor no caminhamento (GPS L1 Bastão), um segundo receptor GPS L1 foi utilizado por meio
de mochila a 1.30m simulando o caminhamento por meio de veículos automotores (GPS L1 Mochila), e finalmente,
um GPS baixa precisão (código CA) representando um conhecimento comum utilizado por diversos profissionais de
áreas distintas para levantamentos de áreas e cadastros no SISLEG (Navegador). A utilização de software como
Trackmaker, Surfer e CAD, ajudaram na análise e interpretação dos resultados.
Os levantamentos de campo consistiram na utilização do método de posicionamento relativo e a técnica
cinemática com uma taxa de coleta dos dados de 1s para todos os receptores.
Os três levantamentos (GPS L1 Bastão, GPS L1 Mochila e Navegador) foram realizados em uma mesma área,
na mesma época e no mesmo percurso. Realizou-se um caminhamento de forma a cobrir toda a área.
A análise de dados é importante não apenas para visualização, mas principalmente para que se possa
posteriormente efetuar o cálculo dos resíduos, para avaliação da precisão dos mesmos os quais dependem da grade
gerada. Desta forma, na análise deve-se considerar apenas a área de interesse sem qualquer extrapolação, fornecendo
resultados confiáveis, buscando informações mais próximas da realidade do campo.
Esta metodologia é avaliada, efetuando a comparação dos resultados dos dados interpolados com os dados
obtidos do GPS com maior precisão. Foi considerada a avaliação qualitativa (isolinhas e o Modelo Digital do
Terreno) dos desempenhos quanto a interpolação dos dados GPS de diferentes precisões, bem como a modelagem
tridimensional, a partir das grades geradas.
O método de interpolação utilizado nesse artigo foi o de Krigagem. Segundo CAMARGO (1997), este
método consiste em cada ponto da superfície ser estimado apenas a partir da interpolação das amostras mais
próximas, utilizando um estimador estatístico. Esses procedimentos requerem que a variabilidade local e global
sejam modeladas através de modelos como:
Nesse caso
aonde βј é um conjunto de parâmetros desconhecidos e fј um conjunto de
funções básicas, em geral, polinomiais (CAMARGO, 1997).
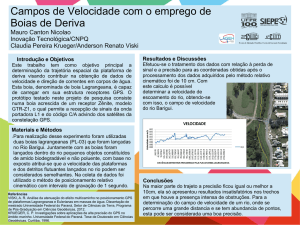
Resultados e Discussões
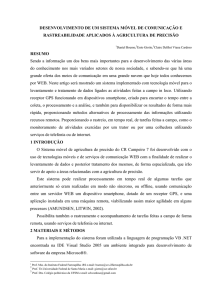
Os dados foram recolhidos e analisados onde observou-se: com o GPS L1 Bastão construiu-se uma
representação do relevo, podendo assim perceber a parte plana da área levantada e a parte com declínio do relevo
ficou evidente, estas informações podem ser notadas observando-se o modelo altimétrico tridimensional na Figura 1.
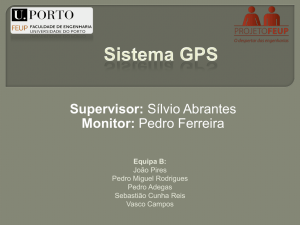
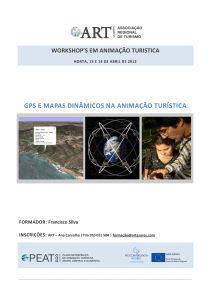
Com o GPS L1 Mochila, obteve-se uma representação semelhante ao L1 Bastão (Figura 2). Com o GPS navegador,
se pode perceber uma diferença significativa no formato da área levantada, tendo assim uma relevância considerável
qualitativamente, quando comparando os resultados do receptor GPS navegação e os obtidos com o os receptores
GPS portadora L1 (Figura 3).
Os dados obtidos com as portadoras L1 (Bastão e Mochila) foram semelhantes quando comparados a
superfície do relevo proposto, ficando evidente assim que o terreno mensurado foi bem representado por ambos
receptores GPS L1, uma vez que o caminho percorrido foi o mesmo. Porém observando os dados adquiridos pelo
receptor GPS Navegador, este mostra um desnível irregular em altitude comparando com a superfície do relevo
proposto (avaliação qualitativa). Percebeu-se também que houve uma disparidade entre os resultados obtidos pelos
caminhos percorridos com as portadoras L1 e com o GPS Navegador. A diferença linear (N, E) entre os
caminhamentos realizados (linhas) do GPS L1 Bastão e o GPS Navegador chegou, em alguns lugares, a 6m (Figura
4).
Subtraindo a imagem altimétrica tridimensional obtida a partir dos dados coletados pelo receptor GPS L1
Bastão e os do receptor L1 Mochila, percebeu-se que não há diferença significativa entre os relevos. Analisando o
resultado dessa subtração conclui-se que quanto mais plana a imagem obtida da subtração, há uma maior
fidedignidade entre os relevos, pois mais parecidos eles seriam. No modelo altimétrico tridimensional dos dados do
receptor GPS L1 Mochila (Figura 2), houve um ponto com uma maior disparidade (2.8m), onde é provável que este
GPS pode ter tido uma perca de sinal no inicio do rastreio, porém no restante do caminhamento mostrou-se que os
dois equipamentos (GPS L1 Bastão e GPS L1 Mochila) se comportaram de forma semelhante, havendo uma
diferença variável de até 1.0m de altura. Lembrando que o GPS L1 Bastão estava capturando os dados a uma
distância de 2.0m do chão, enquanto o GPS L1 Mochila capturava os dados a 1,30m do chão, na altura real
descontaria essa diferença.
Entretanto quando se subtraiu uma imagem altimétrica tridimensional dos dados obtidos pelo receptor GPS
L1 Bastão (Figura) para a imagem gerada a partir dos dados do GPS Navegador (Figura 3), notou-se uma diferença,
ficando com uma área heterogênea, possuindo uma diferença de altitude entre as duas imagens subtraídas de até
56.0m.
Para verificar um erro de tamanha proporção, realizou-se outro levantamento com o mesmo GPS
Navegador, porém no dia subsequente o primeiro levantamento. A imagem altimétrica tridimensional resultante
deste último levantamento, mostrou um relevo totalmente diferente da primeira amostra feita pelo GPS Navegador,
porém esta última teve como resultado uma superfície irregular, com diversas depressões, diferente do relevo natural
da área proposta a medição. Quando feita a subtração da imagem gerada a partir do GPS L1 Bastão, com o segundo
levantamento do GPS Navegador, ainda houve uma variação do desnível, variando a altura de -1,40m até -5,80m,
não dando fidedignidade, assim, gerando desconfianças quanto a precisão do GPS Navegador.
Conclusão
Verificou-se que os dados coletados com receptores L1 tanto Bastão como Mochila, obtiveram um
desempenho preciso do relevo utilizado como fonte de dados, mesmo um sendo marcados os pontos com um bastão
e o outro fixo em uma mochila. Já o GPS Navegador, capturou dados errôneos tanto altimétrico quanto planimétrico,
consolidando assim que não possui uma precisão confiável (erro de até 8m) para realizar levantamentos,
recomendando a utilização de outros equipamentos para realizar levantamentos de áreas pequenas, isso quando
comparado com receptores GPS de maior precisão (LI Bastão e L1 Mochila).
Referências
CAMARGO, Eduardo. Desenvolvimento, Implementação e Teste de Procedimentos Geoestáticos (Krigeagem)
no Sistema de Processamento de Informações Georreferenciadas (SPING). Dissertação (Mestrado em
Sensoriamento Remoto) – Instituto Nacional de Pesquisas Espaciais, São José dos Campos, 1997. 124 f.
SOUZA, Elaine C. B. Análises Temporais de Alta Precisão Utilizando GPS para Avaliação das Variações
Volumétricas Ocorridas no Istmo da Ilha do Mel. Dissertação (Mestrado em Ciências Geodésicas). Departamento
de Geomática. Universidade Federal do Paraná, Curitiba, 2002. 149 f.
Anexos
548
547.5
547
546.5
546
545.5
545
544.5
544
543.5
543
542.5
542
541.5
Figura 1. Levantamento realizado com equipamento GPS L1 Bastão, imagem altimétrica tridimensional (em metros).
547
546.5
546
545.5
545
544.5
544
543.5
543
542.5
542
541.5
541
Figura 2. Levantamento realizado com equipamento GPS L1 Mochila, imagem altimétrica tridimensional (em
metros).
502.5
502
501.5
501
500.5
500
499.5
499
498.5
498
497.5
497
496.5
496
495.5
495
494.5
494
493.5
493
492.5
492
Figura 3. Levantamento realizado com equipamento GPS Navegador, imagem altimétrica tridimensional (em
metros).
Figura 4. Diferença linear (trajeto) entre os três GPS.