EPUSP — 2305 — Laboratório Digital
CONTROLE DE UM SERVO MOTOR
Versão 2014
RESUMO
Esta experiência tem como objetivo a familiarização e o projeto de um circuito de controle simples de um
servo motor. A parte experimental inclui atividades de familiarização de um servo motor e depois de
implementação de um circuito digital para controle de sua posição.
OBJETIVOS
Após a conclusão desta experiência, os seguintes tópicos devem ser conhecidos pelos alunos:
Funcionamento de um servo motor;
Modulação PWM;
Circuito de controle.
1. PARTE TEÓRICA
Um servo motor é um motor elétrico cuja principal diferença com outros motores é seu controle de
posicionamento. É muito usado em aplicações, como automodelismo e aeromodelismo, onde o controle
preciso de posicionamento de partes do equipamento é essencial para seu funcionamento. A figura 1
ilustra seu uso em aeromodelos.
Figura 1.1 – Exemplo de aplicação de servo motores.
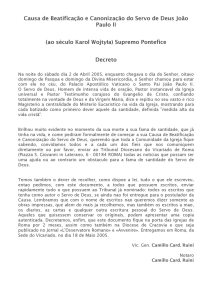
Internamente, como ilustrado na figura 1.2, um servo motor é composto por diversos elementos:
Motor – responsável pelo acionamento das engrenagens e eixo principal do servo motor;
Engrenagens – responsáveis pela redução da rotação do motor e aumento do torque;
Encaixe de saída – conexão de saída para controle;
Potenciômetro – usado para monitorar a posição do servo motor;
Circuito de controle – base do funcionamento do servo motor, monitora a saída do
potenciômetro e a ativação do motor interno para manter a posição determinada pela entrada.
Figura 1.2 – Organização interna de servo motores.
Controle de um Servo Motor - semestral (2014)
1
EPUSP — 2305 — Laboratório Digital
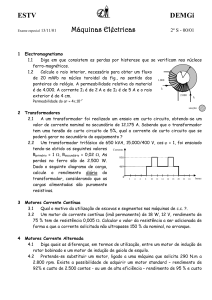
O controle do servo motor é obtido por um sinal de entrada que apresenta níveis de tensão TTL e que
especifica a sua posição. O formato deste sinal segue a modulação PWM (Pulse Width Modulation ou
Modulação por largura de pulso), conforme ilustrado na figura 1.3. Uma informação é codificada em
modulação PWM através da largura do pulso em nível alto em relação ao período total de oscilação, ou
seja, através do seu fator de forma (duty cycle).
Figura 1.3 – Modulação PWM e Fator de forma.
A modulação PWM tem diversas aplicações. Uma aplicação simples é usá-lo para controlar a intensidade
luminosa de um led, conhecida como “dimmer de leds”. Ao mudar a razão em que o sinal fica em nível
alto é possível controlar o tempo em que o led fica iluminado e, assim, com uma frequência de oscilação
adequada, temos a sensação de que é possível mudar sua intensidade luminosa.
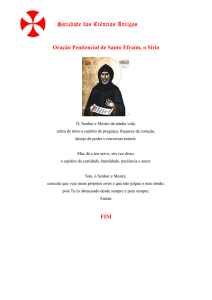
Em um servo motor, a posição é controlada com um sinal com período de 50 Hz e pulsos com largura de
1 até 2 ms, conforme ilustrado na figura 1.4. Variando-se a largura do pulso a posição pode ser variada
em até 180º.
Figura 1.4 – Sinais de controle de um servo motor.
A conexão do servo motor pode adotar alguns padrões diferentes, dependendo do fabricante. A figura 1.5
mostra a conexão do fabricante JR. Contudo, todas as conexões apresentam três sinais:
TERRA ou –
VCC ou + (5V)
Sinal de controle: sinal PWM com nível de tensão compatível com TTL.
Figura 1.5 – Conexões de um servo motor.
Controle de um Servo Motor - semestral (2014)
2
EPUSP — 2305 — Laboratório Digital
2. PARTE EXPERIMENTAL
2.1. Atividades Pré-Laboratório
Nesta experiência será projetado um circuito de controle de um servo motor com formas de onda
conforme apresentado na figura 1.4. A especificação da interface do circuito de controle é apresentada na
figura 2.1.
posição
(C1-C0)
entra
(B1)
Controle de
um servo
Controle PWM
clock
Figura 2.1 – Interface do circuito de controle de um servo motor.
O sinal de controle PWM do servo motor é gerado a partir de dois sinais de entrada:
posição: sinal de 2 bits que permite especificar a posição do servo motor. Os valores de entrada
permitem ajustar o servo para a posição mínima (01), central (10) e máxima (11).
entra: a mudança do sinal de controle é acionada apenas com a borda de subida deste sinal.
clock: sinal de clock de 2KHz de entrada.
DICA:
A geração do sinal de controle PWM pode ser realizada de várias formas. A primeira usa um contador
módulo 401 e o acionamento da saída em nível alto é baseado na comparação da contagem com certos
valores pertencentes a um determinado intervalo. Por exemplo, durante a contagem do contador módulo
40, a geração de um sinal PWM com fator de forma de 25% pode ser realizada com a saída em nível alto
durante os primeiros 10 valores de contagem.
Uma alternativa é adotar o seguinte diagrama de transição de estados (figura 2.2).
Figura 2.2 – Um diagrama de transição de estados para o controle PWM.
Com base no contador módulo 40, enquanto a contagem for menor que determinado valor, a saída fica
em nível ALTO. A partir deste valor, a saída fica em nível baixo até o final do ciclo de contagem. Este
valor deve ser calculado para gerar o fator de forma desejado.
a)
Documente o funcionamento do projeto. Incluir cartas de tempo com a geração de diversas saídas
com os diferentes fatores de forma.
b)
Procure minimizar o número de componentes para facilitar a montagem do projeto.
1
Para obter um período de 20 ms e um clock de entrada de 2 KHz (com ciclo de 0,5 ms), devemos usar um contador
módulo 40 (20 ms = 40 x 0,5 ms).
Controle de um Servo Motor - semestral (2014)
3
EPUSP — 2305 — Laboratório Digital
2.2. Montagem do Circuito de Controle de um Servo Motor
c)
Montar o circuito de controle de um servo motor projetado no painel de montagem, usando as
chaves C0 e C1 para determinar a posição e o botão B1 para o sinal entra. Use um clock de 2 KHz
de um gerador de sinais.
Observação: Se necessário, use leds e displays do painel para o teste e depuração do circuito.
d)
Executar os testes necessários para mostrar o correto funcionamento do circuito.
e)
Capture as formas de onda no osciloscópio.
2.3. Familiarização com um Servo Motor
Antes de conectarmos o circuito de controle com o servo motor, realizaremos uma atividade de
familiarização.
f)
Localize o cabo de controle e identifique os sinais de controle do servo motor. Apresente no
relatório, as cores que identificam cada sinal.
g)
Ajuste o gerador de sinais para gerar um sinal PWM com nível TTL e largura de pulso variando de 1
a 2 ms. Visualize e controle a largura de pulso com auxílio de um osciloscópio.
h)
Alimente o servo motor no painel de montagens experimentais e ligue o sinal de controle na saída
do gerador de sinais. CUIDADO para que a saída não tenha pulsos que fiquem fora do intervalo de
1 a 2 ms.
i)
Varie a largura do pulso em nível alto e verifique o comportamento do servo motor.
2.4. Controle de um Servo Motor
Neste item, o circuito de controle deverá ser ligado ao servo motor.
j)
Ligue a saída do circuito projetado na entrada de controle do servo motor.
k)
Varie a posição com o acionamento das chaves e verifique o comportamento do servo.
l)
(DESAFIO) O professor poderá especificar uma modificação ao projeto do circuito de controle.
Implemente esta modificação e documente o projeto e as atividades experimentais.
2.5. Atividades Pós-Laboratório
m)
Responder as questões abaixo.
1.
2.
3.
Explique como seria um sistema de controle de um sistema composto por dois servo motores?
Como o circuito de controle do servo motor pode garantir que o sinal PWM não apresente pulsos com largura
forma dos limites de funcionamento correto do servo? Explique.
Apresente possíveis aplicações do circuito da experiência.
Controle de um Servo Motor - semestral (2014)
4
EPUSP — 2305 — Laboratório Digital
3. BIBLIOGRAFIA
Fairchild Semiconductor. TTL Data Book. Mountain View, California, 1978.
FREGNI, E.; SARAIVA, A. M. Engenharia do Projeto Lógico Digital: Conceitos e Prática.
Editora Edgard Blücher Ltda, 1995.
TOCCI, R. J.; WIDMER, N. S.; MOSS, G. L. Digital Systems: principles and applications.
11th ed., Prentice-Hall, 2011.
WAKERLY, J. F. Digital Design Principles & Practices. 4th edition, Prentice Hall, 2006.
4. MATERIAL DISPONÍVEL
Circuitos Integrados TTL:
7400, 7404, 7408, 7432, 7485, 7486, 74138, 74157, 74161, 74175.
5. EQUIPAMENTOS NECESSÁRIOS
1 painel de montagens experimentais.
1 fonte de alimentação fixa, 5V 5%, 4A.
1 osciloscópio digital.
1 multímetro digital.
Histórico de Revisões
E.T.M./2014 – versão inicial.
Controle de um Servo Motor - semestral (2014)
5