Exercícios de Conversão 2 – SERVOMOTOR CC
1- Por que, em geral, um servo motor CC não tem controle de velocidade pelo
campo?
2- Onde se utilizam servo motores CC ?
3- Quais as características principais de um servo motor CC, em termos de
acionamento?
4- Quais são os tipos de sensor que um servo motor pode utilizar, considerando-se
controle de velocidade e/ou posição do eixo ?
5- Qual deles permite controle de velocidade somente?
6- Desenhe um servoacionamento, identificando as suas partes principais,
mostrando de forma simples o servo motor, o sensor de posição e/ou velocidade
e o servoamplificador, este último como um bloco simples, indicando também,
com setas, as conexões entre as partes do servoacionamento.
7- O regime de trabalho de um servo motor em termos de solicitações elétricas é:
a) leve
b) pesado
Por que ?
8- Mostre pela expressão matemática por que a corrente elétrica de partida de um
servo motor CC é maior do que a corrente de regime.
9- Como pode ser feito o controle de velocidade de um servo motor CC?
10- Quais são os circuitos básicos que compõe um servoamplificador?
11- Qual a grandeza utilizada para se dimensionar um servomotor?
12- Ao se acionar um servomotor com tensão PWM, verifica-se que com o aumento
da frequência o mesmo tem redução de torque. Explique a causa deste
fenômeno, abordando a corrente de armadura.
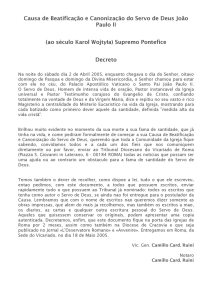
13- Explique o que acontecerá com a velocidade do servomotor acionado pelas
formas de onda de tensão, mostradas abaixo.
Va
Va
t
T
t
T
14- Desenhe um circuito de controle, somente a parte de potência, para controlar
um servomotor CC, nos dois sentidos de rotação.
15- Fale resumidamente sobre o acionamento de servomotores CC
16- a) Quais os tipos de ímãs utilizados em servomotoes CC? b) Qual o melhor
atualmente?
17- Com relação aos ímãs do estator de um servomotor CC, o que é força coercitiva?
18- Qual a influência do momento de inércia (J) no funcionamento de um sevomotor
CC?
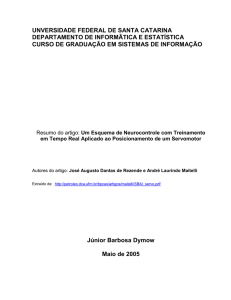
19- Analise a estrutura do servomotor abaixo. Qual a diferença entre ele e um servo
motor normal, excetuando-se o encoder e o acionamento mecânico frontal
(engrenagens)?