C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:44 Página 129
Mecânica
FRENTE 1
MÓDULO 19
Atrito
1. CONCEITO DE ATRITO
2. ATRITO ESTÁTICO
Atrito é um estado de aspereza
ou rugosidade entre dois sólidos em
contato, que permite a troca de forças em uma direção tangencial à
região de contato entre os sólidos.
• O fato de existir atrito entre
dois sólidos não implica, necessariamente, a existência de uma força
de atrito entre eles.
• A força de atrito só se manifesta quando há deslizamento entre
os sólidos (atrito dinâmico) ou
quando houver tendência de deslizamento entre os sólidos (atrito
estático).
• O sentido da força de atrito é
sempre contrário ao deslizamento ou
à tendência de deslizamento entre
sólidos em contato.
• De acordo com a 3.a Lei de
Newton (Ação e Reação), os sólidos
A e B trocam entre si forças de atrito,
isto é, existe uma força de atrito que
A aplica em B e outra força de atrito
que B aplica em A. É evidente que
tais forças de atrito são opostas, isto
é, têm mesma intensidade, mesma
direção e sentidos opostos.
• Quando entre dois sólidos A e
B existe atrito e, embora não haja
movimento relativo entre eles, há uma
tendência de deslizamento,
isto é, há uma solicitação ao
movimento, surge uma força de
atrito no sentido de evitar o deslizamento relativo, denominada força
de atrito estática.
• Não havendo deslizamento, a
força de atrito estática tem intensidade igual à da força que solicitou o sistema a se mover, chamada força motriz.
→
Fat
BA
→
= – Fat
AB
• As forças de atrito trocadas en →
→
tre A e B ( Fat e Fat ) nunca se equiBA
AB
libram, porque estão aplicadas em
corpos distintos.
Fat
estática
= Fmotriz
• Dependendo da intensidade
→
da força motriz ( F ), a força de atrito
→
estática ( Fat ) tem intensidade que
E
pode variar de zero (não há solicitação ao movimento) até um valor
máximo chamado força de atrito de
destaque (o deslizamento entre os
sólidos em contato é iminente).
0 ≤ Fat
E
≤ Fat
destaque
• A força de atrito de destaque
(Fat ) tem intensidade proporcional à
D
intensidade da força normal de contato entre os sólidos (FN), isto é, a
força que tende a apertar um sólido
contra o outro.
• A constante de proporcionalidade entre a força de atrito de destaque (Fat ) e a força normal (FN) só
D
depende dos sólidos em contato
(material dos corpos, polimento, lubrificação) e é denominada coeficiente de atrito estático (E).
Fat = E FN
D
3. ATRITO DINÂMICO
• À medida que a força motriz
vai aumentando (maior solicitação ao
movimento), a força de atrito estática
também vai aumentando, de modo a
continuar evitando o movimento relativo entre os sólidos. Contudo, existe
uma limitação para o valor da força
de atrito estática, isto é, existe uma
força de atrito máxima que é denominada força de atrito de destaque.
• Quando a intensidade da força motriz (F) supera a intensidade da
força de atrito de destaque (FatD),
tem início o deslizamento entre os sólidos em contato e o atrito é chamado
dinâmico ou cinético.
• É de verificação experimental
que o coeficiente de atrito dinâmico
(d) é menor do que o coeficiente de
atrito estático (E), o que significa
que, ao iniciar o movimento, a força
de atrito diminui sua intensidade.
d < E
Fatdin = d FN
FatD = E FN
}
⇒ Fatdin < FatD
– 129
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:44 Página 130
• Durante o deslizamento entre os sólidos, supondo-se que as suas superfícies de contato sejam homogêneas (d constante) e que a intensidade da força normal
seja constante (FN constante), a força de atrito terá intensidade constante, não importando a velocidade relativa
entre os sólidos, nem a intensidade da força motriz.
Exemplo (1)
Durante o movimento:
Fat
din
= d FN = constante
4. COEFICIENTE DE ATRITO
Exemplo (2)
Muitas vezes, para simplificar os exercícios,
assume-se a igualdade dos coeficientes de atrito
estático e dinâmico (hipótese teórica), o que implica a
igualdade das intensidades das forças de atrito de
destaque e dinâmica.
E = d ⇔ Fat = Fat
D
din
5. GRÁFICO DA FORÇA DE ATRITO
Para uma força motriz de intensidade F crescente,
representamos a intensidade da força de atrito trocada
entre dois sólidos.
Exemplo(3)
Exemplo (4)
6. FORÇA NORMAL
A força normal corresponde à força de compressão
entre os corpos e deve ser identificada em cada exercício, conforme exemplos a seguir:
130 –
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:44 Página 131
MÓDULO 20
Plano Inclinado
1. COMPONENTES
DA FORÇA PESO
3. ACELERAÇÃO NO PLANO
INCLINADO COM ATRITO
2a. Lei de Newton (PFD):
Quando um corpo se move livremente em um plano inclinado, com
atrito, a força resultante, responsável
pela sua aceleração, é a soma vetorial da componente tangencial de
seu peso (Pt = m g sen θ) com a força
de atrito dinâmica (Fat = µd m g cos θ).
m g sen θ – µd m g cos θ = m a
4. ÂNGULO DE ATRITO
• Se o corpo for lançado para cima, teremos:
q
Da figura:
Pt
sen θ = –––
P
Pn
cos θ = –––
P
Pt – Fat = m a
a = g(sen θ – μd cos θ)
Estático
Se o corpo permanecer em repouso no plano inclinado, porém na iminência de deslizar, isto é, a força de
atrito solicitada ao máximo, teremos:
Fat = Pt
D
• Pt = P sen θ: componente
tangencial do peso; é a componente
que solicita o bloco para baixo; na
ausência de atrito faz o papel de
resultante que acelera o bloco.
• Pn = P cos θ: componente
normal do peso; é a componente de
compressão que aperta o bloco contra o plano inclinado; é equilibrada
pela reação normal de apoio e só tem
interesse em problemas com atrito.
2. ACELERAÇÃO NO PLANO
INCLINADO SEM ATRITO
Quando um corpo se move livremente em um plano inclinado, sem
atrito, a força resultante responsável
por sua aceleração é a componente
tangencial de seu peso:
2a. Lei de Newton (PFD): Pt = m a
m g sen θ = m a ⇒ a = g sen θ
Observe que a intensidade da
aceleração (g sen θ) é independente
da massa do corpo.
µe m g cos θE = m g sen θE
μE = tg θE
2a. Lei de Newton (PFD):
Pt + Fat = m a
m g sen θ + µd m g cos θ = m a
a = g(sen θ + μd cos θ)
• Se o corpo for abandonado do
repouso ou lançado para baixo, teremos:
O ângulo θE, tal que µE = tg θE, é
chamado “ângulo de atrito estático”.
q
Dinâmico
Se o corpo for lançado para baixo no plano inclinado e descer em
movimento retilíneo e uniforme (aceleração nula), teremos:
Fat
din
= Pt
µd m g cos θd = m g sen θd
μd = tg θd
O ângulo θd, tal que µd = tg θd, é
chamado “ângulo de atrito dinâmico”.
– 131
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:44 Página 132
MÓDULO 21
Componentes da Resultante
→
→ →
FR = Ft + Fcp
1. FORÇA RESULTANTE
Admitamos que sobre um corpo
→ →
→
atuem as forças F1, F2, ..., Fn em relação a um sistema de referência inercial (para nossos estudos, ligado à
superfície terrestre).
A força resultante sobre o corpo
é a soma vetorial das forças atuantes.
→
→
→
→
FR = F1 + F2 + .... + Fn
A intensidade da força resultante
é obtida pela aplicação do Teorema
de Pitágoras.
2
2
2
FR = Ft + Fcp
3. COMPONENTE
TANGENCIAL
DA FORÇA RESULTANTE
q
Portanto, a força resultante é uma
força imaginária (hipotética) que
poderia substituir as forças reais e
produzir no corpo a mesma aceleração vetorial.
Função
A componente
tangencial da for→
ça resultante Ft está ligada à acelera→
ção tangencial a t e, portanto, provoca variação na intensidade da velocidade vetorial.
2. COMPONENTES DA FORÇA
RESULTANTE
→
→
→
Ft ⇒ at ⇒ variação de | V |
Para facilitar seu estudo, a força
→
FR costuma ser separada em duas
componentes.
A resultante tangencial é
nula nos movimentos unifor→
mes ( V é constante) e está
presente nos movimentos va→
riados ( V varia), não importando a trajetória do móvel.
Características vetoriais
• Intensidade
4. COMPONENTE CENTRÍPETA
DA FORÇA RESULTANTE
q
Função
A componente centrípeta da for→
ça resultante Fcp está ligada à ace→
leração centrípeta acp e, portanto,
provoca variação na direção da velocidade vetorial, tornando a trajetória
curva.
→
→
→
Fcp ⇒ acp ⇒ variação na direção de V
A resultante centrípeta é
nula nos movimentos
retilíneos
→
(direção de V é constante) e
está presente nos movi→mentos
curvilíneos (direção de V varia).
Características vetoriais
• Intensidade
→
→
→
Ft = m at = m γ • Direção
→
tangente à trajetória (// a V).
→
Ft: componente tangencial de FR
→
→
Fcp: componente centrípeta de FR
→
→
Cumpre ressaltar que Ft e Fcp
não são forças que realmente atuam
no corpo, mas apenas componentes
da força resultante (que é uma força
imaginária).
A força resultante é a soma vetorial de suas componentes tangencial
e centrípeta.
132 –
• Sentido
O mesmo da velocidade vetorial
nos movimentos acelerados.
Oposto ao da velocidade vetorial
nos movimentos retardados.
m V2
m = massa do corpo.
V = intensidade da velocidade
linear.
ω = intensidade da velocidade
angular.
R = raio de curvatura da trajetória.
m = massa do corpo.
γ = aceleração escalar.
→
→
| Fcp | = m | acp | = –––––– = m ω2R
R
• Direção
Normal à trajetória (
→
a V ).
• Sentido
Dirigido para o interior da curva
descrita.
5. FORÇA RESULTANTE NOS
PRINCIPAIS MOVIMENTOS
q
MRU
→
→
Ft = 0 porque o movimento é uniforme.
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:44 Página 133
→
→
Fcp = 0 porque o movimento é retilíneo.
→
q
No ponto D, o peso faz o papel
de resultante tangencial e a força
normal, aplicada pelo trilho, faz o
papel de resultante centrípeta:
Ponto A
→
FR = 0
q
MRUV
→
Ft = P ⇔ | γ | = g
→
D
Ft ≠ 0 porque o movimento é variado.
→
Fcp = ND
→
D
Fcp = 0 porque o movimento é
retilíneo.
→
→
q
FR = Ft
q
MCU
→
→
Ft = 0 porque o movimento é
uniforme.
→
→
Fcp ≠ 0 porque o movimento é
curvilíneo.
→
Ponto C
No ponto A, a resultante tangencial é nula e a resultante centrípeta
tem intensidade dada por:
Fcp = NA + P
A
→
FR = Fcp
q
MCUV
→
q
Ponto B
→
Ft ≠ 0 porque o movimento é variado.
→
→
Fcp ≠ 0 porque o movimento é
curvilíneo.
No ponto C, o peso é decomposto em uma componente tangen→
→
cial Pt e uma componente normal Pn.
No ponto C, a componente tangencial do peso (Pt = P sen θ) faz o
papel de resultante tangencial:
→
→ →
FR = Ft + Fcp
6. EXEMPLO
Consideremos uma pequena esfera percorrendo um trilho circular
sem atrito, em posição vertical, sob a
ação exclusiva de seu peso e da
força normal aplicada pelo trilho.
Ft = Pt = P sen θ ⇒ | γ | = g sen θ
C
No ponto B, a resultante tangencial é nula e a resultante centrípeta
tem intensidade dada por:
No ponto C, a resultante entre a
força normal (NC) e a componente
normal do peso (Pn = P cos θ) faz o
papel de resultante centrípeta:
Fcp = NB – P
B
Fcp = NC – Pn = NC – P cos θ
C
q
Ponto D
7. FORÇA CENTRÍFUGA
Consideremos os pontos A, B, C
e D indicados na figura e analisemos
as forças em cada uma dessas
posições:
As leis de Newton só podem ser
aplicadas em relação a certos sistemas de referência privilegiados, chamados sistemas inerciais.
Em nossos estudos, consideramos como inerciais os sistemas de
referência em repouso ou em
translação retilínea e uniforme
em relação à superfície terrestre.
– 133
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:44 Página 134
Consideremos uma plataforma horizontal, com
movimento de rotação uniforme em relação ao solo terrestre e velocidade angular de módulo ω.
Consideremos um bloco de massa m, em repouso
em relação à plataforma.
Para um referencial fixo no solo terrestre, o
bloco está em movimento circular e uniforme sob
ação de duas forças:
→
1) força de gravidade P aplicada pela Terra;
→
2) força de contato F aplicada pelo apoio.
→
→
Esta força F admite uma componente normal FN,
→
→
que equilibra o peso P, e uma componente de atrito Fat,
que faz o papel de resultante centrípeta.
referencial adotado estar em movimento de rotação em
relação ao solo terrestre. Tal força é chamada de força
de inércia centrífuga ou simplesmente força centrífuga.
Referencial na plataforma:
bloco em repouso
→ → →
→
F + P + Fcf = 0
Referencial no solo terrestre:
→
→
| FN| = | P|
→
| Fat| = Fcp = mω2R
Portanto, quando surge a pergunta:
Para um referencial fixo na plataforma, o
→
→
bloco está em repouso e, além das forças F e P, o
bloco estará sujeito a uma terceira força, dirigida para
fora, com a mesma intensidade e direção da força de
→ →
atrito, de modo que a resultante de F, P e desta terceira
força seja nula.
Esta força dirigida para fora e de intensidade mω2R
não é aplicada por nenhum agente físico; não é uma força
real, do tipo ação-reação e é motivada pelo fato de o
“Força centrífuga existe ou não?”, a
resposta é simples: depende do referencial
adotado.
Para um referencial ligado ao solo terrestre (sistema de referência inercial), não
existe força centrífuga.
Para um referencial ligado a um sistema em
rotação ou descrevendo uma curva, em relação
ao solo terrestre, existe a força centrífuga (força
de inércia, força fictícia, pseudoforça ou força
de correção de referencial) que tende a lançar o
corpo “para fora da curva”.
MÓDULO 22
Exercícios de Força Centrípeta
MÓDULO 23
Trabalho
1. CONCEITO
→
Uma força F realiza trabalho
quando
(I) transfere energia mecânica
de um corpo para outro;
(II) transforma energia cinética
em potencial ou vice-versa;
(III) transforma energia mecânica em outra forma de energia (por
exemplo, em térmica).
Portanto, na conceituação de trabalho, deve estar sempre presente
um agente físico força e uma trans-
134 –
ferência ou transformação de energia
mecânica.
2. DEFINIÇÃO
→
Quando a força ( F ) é constante
e o seu ponto de
aplicação sofre um
→
deslocamento
(
d
), tal que o ângulo
→
→
entre d e F vale θ, o trabalho é dado
por:
→ →
τF = | F | | d | cos θ
• Quando a força é variável, a
definição de trabalho é feita com o
uso da função matemática integral e
do produto escalar entre dois vetores
e, portanto, foge ao nível do Ensino
Médio.
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:44 Página 135
• No caso de forças variáveis, o
cálculo do trabalho pode ser feito
com o auxílio do teorema da energia
cinética ou do método gráfico.
• O trabalho de uma força
constante não depende da trajetória do móvel entre os pontos A e B.
6. FORÇA CONSERVATIVA
Quando
o trabalho de uma
→
força F , entre dois pontos A e
B, não→depende da trajetória, a
força F é chamada conservativa.
Uma força constante é um exemplo de força conservativa.
A força peso e a força eletrostática são exemplos importantes de
forças conservativas.
3. CÁLCULO DO TRABALHO
PELAS PROJEÇÕES
Quando dois vetores formam entre si um ângulo θ, o produto do módulo de um deles pelo cos θ corresponde à projeção desse vetor na
direção do outro:
7. TRABALHO NULO
O trabalho é nulo quando não há
transferência ou transformação de
energia mecânica. Isso acontece em
três casos:
O trabalho do peso não
depende da trajetória
5. SINAL DO TRABALHO
→
Quando a força F favorece o deslocamento, temos:
→
cos θ > 0 e o trabalho de F é
positivo.
→
Quando a força F se opõe ao
deslocamento, temos:
→
cos θ < 0 e o trabalho de F
é negativo.
Assim:
→
→
| d | cos θ = proj. d
→
→
| F | cos θ = proj. F
4. CÁLCULO DO
TRABALHO DO PESO
→
→
→
τp = | P | | d | cos θ
|P|=mg
H
cos θ = ––––
→
|d|
}
Daí: τp = m g H
Força nula
Sem força, não há realização de
trabalho.
q Deslocamento nulo
Se o ponto de aplicação da força
não sofre deslocamento, não há trabalho, porque não há transferência,
nem transformação de energia mecânica.
q Força perpendicular
ao deslocamento
→
Quando
a força F e o deslocamen→
to d forem perpendiculares (θ = 90°),
temos:
cos θ = 0 ⇒ τF = 0
A definição de trabalho de uma
força constante nos conduz a:
→
→
τF = | F | proj. d
→
→
τF = | d | proj. F
O cálculo do trabalho pelo método das projeções nos revela que
apenas a componente da força na
direção do deslocamento realiza
trabalho, isto é, transfere ou transforma energia mecânica.
q
No caso da força peso, temos:
Na subida do corpo, o trabalho
do peso é negativo e corresponde
à transformação de energia cinética
em energia potencial:
τp = – m g H
Exemplos
Quando o deslocamento é horizontal, a força peso não realiza trabalho.
A reação normal de apoio não
realiza trabalho quando é perpendicular à trajetória.
A componente centrípeta da força resultante nunca realiza trabalho
por ser perpendicular à trajetória.
8. UNIDADES
q
Unidade
Da definição de trabalho, temos:
→ →
τ = | F | | d | cos θ
u(τ) = N . m
Na descida do corpo, o trabalho
do peso é positivo e corresponde à
transformação de energia potencial
em energia cinética.
A unidade de trabalho no SI é denominada joule (J).
τp = + m g H
joule (J) = N . m
– 135
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:44 Página 136
MÓDULO 24
Teorema da Energia Cinética e Método Gráfico
1. TEOREMA DA
ENERGIA CINÉTICA
Substituindo-se
� em �, vem:
A energia cinética (Ec) ou de
movimento de um corpo de massa m
e velocidade escalar V é dada por:
V f – V0
τF = m –––––––––
2
m V2
Ec = –––––––
2
mV f
mV 0
τF = –––––
– –––––
2
2
2
2
2
O teorema da energia cinética
permite calcular o trabalho total realizado sobre um corpo:
A soma dos trabalhos de
todas as forças atuantes em
um corpo (internas e externas) mede a variação de sua
energia cinética:
2
τF = ΔEcin
N
τBC = – área (A2)
N
3.
2
Podemos demonstrar o TEC para
o caso particular de uma força resultante constante que atua em uma
partícula que se move em trajetória
retilínea.
TRABALHO NO
LEVANTAMENTO
DE UM CORPO
Considere um corpo levantado
com velocidade escalar constante
(ou partindo do repouso e voltando
ao repouso) de uma altura H,
sob
→
seu
peso
P
e
de
ação exclusiva de
→
uma força motriz F.
m Vf
m V0
= ––––––– – –––––––
2
2
O TEC pode ser usado para
qualquer tipo de força resultante:
constante ou variável, conservativa
ou dissipativa.
τ0C = área (A1) – área (A2)
2. MÉTODO GRÁFICO
τF + τF + ... + τF =
1
2
n
2
N
τ0B = área (A1)
Seja o gráfico do valor da componente tangencial da força resultante Ft em um corpo, em função da
distância percorrida d pelo corpo, ao
longo de sua trajetória.
A área sob o gráfico da função
Ft = f(d) mede o trabalho realizado no
deslocamento considerado.
Note que apenas a componente
tangencial da força resultante realiza
trabalho sobre o corpo.
Aplicando-se o TEC, temos:
→
ÁREA (FORÇA x DISTÂNCIA)
MEDE O TRABALHO
REALIZADO
→
τF = | F | | d | cos θ
τF = m γ Δs cos 0°
�
Da Equação de Torricelli:
2
2
V = V 0 + 2 γ Δs
f
2
2
V – V0
f
γ Δs = –––––––––
2
136 –
�
Quando o gráfico indicar valor
positivo para Ft, o deslocamento
(suposto→crescente) se dá no sentido de Ft e o trabalho é positivo.
Quando o gráfico indica valor negativo para Ft, o deslocamento (suposto
crescente) se dá em sentido contrário ao de Ft e o trabalho é negativo.
τF + τP = ΔEcin
Sendo τP = – m g H (subida) e
ΔEcin = 0 (movimento uniforme ou
Vf = V 0 = 0), temos:
τF – m g H = 0
τF = m g H = PH
→
O trabalho de F não dependerá da trajetória ou do
tempo de trajeto.
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:44 Página 137
4.
TRABALHO INTERNO
O trabalho total, que mede a variação da energia cinética, é a soma
dos trabalhos de todas as forças externas e internas ligadas ao sistema
físico em estudo.
Por vezes, o trabalho da força
resultante externa é nulo e o
trabalho interno é responsável
pela variação da energia cinética do sistema estudado.
Considere os seguintes exemplos:
Exemplo 1: um rapaz sobre patins, em um plano horizontal sem atrito, aplica sobre a parede vertical
uma força horizontal e passa a se
mover sobre o plano horizontal.
As forças externas atuantes no
rapaz, durante a interação com a parede, são:
1) o peso do rapaz;
2) as reações normais do chão;
→
3) uma força horizontal F aplicada pela parede.
A resultante externa responsável
pela aceleração
do rapaz é a força
→
horizontal F aplicada pela parede,
porém seu trabalho é nulo,
porque não há deslocamento
de seu ponto de aplicação.
A energia cinética adquirida pela
pessoa é proveniente do trabalho
interno realizado pelas forças musculares da pessoa.
Note que estas forças internas não têm nenhum papel no
processo de aceleração da
pessoa, porém seus pontos de
aplicação deslocam-se de modo a realizar trabalho e transformar energia interna da pessoa em energia cinética.
Exemplo 2: considere uma
pessoa andando com movimento
acelerado em um plano horizontal,
despreze o efeito do ar e admita que
os pés da pessoa não escorreguem
em relação ao chão.
As forças externas que agem na
pessoa são: →
a) o peso P;
b) a reação normal do chão;
c) a força de atrito aplicada pelo
chão.
A resultante externa responsável
pela aceleração da pessoa é a força
de atrito aplicada pelo chão, porém
seu trabalho é nulo, pois o atrito entre
o pé e o chão é estático, uma vez
que os pontos de contato entre o pé
e o chão têm velocidade nula como
condição para que não haja escorregamento entre eles.
O trabalho nulo do atrito pode ser
interpretado pelo fato de não haver
transferência de energia mecânica
do chão para a pessoa.
A variação da energia cinética
da pessoa é proveniente do tra-
balho interno realizado pelas forças musculares da pessoa.
Observe mais uma vez que a
força de atrito é a resultante
externa responsável pela aceleração da pessoa, porém a
variação da energia cinética é
proveniente do trabalho interno das forças musculares.
Exemplo 3: considere um automóvel, em movimento acelerado, em
um plano horizontal, despreze o
efeito do ar, admita que os pneus não
derrapem e que as rodas traseiras
sejam as rodas motrizes.
As forças externas que agem no
carro são:
→
a) o peso P;
b) as reações normais do chão;
c) as forças de atrito que o chão
aplica nos pneus.
A resultante externa responsável
pela aceleração do carro é a resultante das forças de atrito que o chão
aplicou nos pneus, porém o trabalho
dessa resultante externa é nulo, pois
o atrito entre os pneus e o chão é
estático, uma vez que os pontos de
contato entre os pneus e o chão têm
velocidade nula como condição para
que os pneus não derrapem.
A variação da energia cinética do carro é proveniente do
trabalho interno: a expansão dos
gases nos cilindros do motor originam forças internas, algumas das
quais realizam trabalho.
A força de atrito é a resultante externa responsável pela aceleração do carro, porém
a variação da energia cinética
é proveniente do trabalho interno das forças ligadas à expansão dos gases nos cilindros do motor.
– 137
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:44 Página 138
Óptica e Ondulatória
FRENTE 2
MÓDULO 19
1. ÂNGULO LIMITE
q
Ângulo limite de refração
Considere dois meios transparentes e homogêneos (1) e (2), delimitados por uma superfície (S), com
índices de refração absolutos n1 e n2,
tais que n2 > n1, para uma dada luz
monocromática.
Vamos supor que a luz se propague no sentido do meio menos para
o meio mais refringente.
Para incidência normal, ocorre
refração da luz, porém não ocorre
desvio de sua trajetória.
Refração (II) – Reflexão Total
O valor máximo do ângulo de refração é denominado ângulo limite de refração (L).
q
Ângulo limite de incidência
Considere, agora, a luz se propagando no sentido do meio mais para
o meio menos refringente.
Para incidência normal (i = 0°), a
refração ocorre sem desvio do raio
refratado (r = 0°).
O ângulo limite de incidência (L)
pode ser calculado pela aplicação
da Lei de Snell-Descartes:
n2 sen i = n1 sen r
n2 sen L = n1 . sen 90°
n1
nmenor
sen L = –––
ou sen L = –––––––
n2
nmaior
Se aumentarmos o ângulo de incidência (i), o ângulo de refração (r)
também aumentará, porém sempre
respeitando a condição r < i.
Se aumentarmos o ângulo de incidência (i), o ângulo de refração (r)
também aumentará, porém, neste
caso, r > i.
Notas
• Para um par de meios (1) e (2),
os ângulos limites de incidência e de
refração são iguais, por isso, indicamos pela mesma letra L.
• O ângulo limite de incidência
ou refração ocorre sempre no meio
mais refringente.
2. REFLEXÃO TOTAL
Se a luz incidir com ângulo maior
do que o limite, não poderá ocorrer refração e a luz será totalmente refletida.
Quando o ângulo de incidência (i)
for máximo, isto é, i = 90° (incidência rasante), o ângulo de refração (r) também
será máximo, porém rmáx < imáx = 90°.
138 –
Quando o ângulo de refração (r)
for máximo e igual a 90° (emergência
rasante), o ângulo de incidência correspondente será o ângulo de incidência máximo para o qual ainda
ocorre refração e é denominado ângulo limite de incidência (L).
Portanto, para ocorrer reflexão
total, a luz deve-se propagar no
sentido do meio mais para o meio
menos refringente e o ângulo de incidência deve superar o ângulo limite.
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 139
MÓDULO 20
Lentes Esféricas I – Construções Gráficas
1. DEFINIÇÃO
Assim, temos os seguintes tipos
de lentes:
Denomina-se lente esférica
uma associação de dois dioptros
esféricos ou um dioptro esférico e
outro plano.
Sendo n2 o índice de refração absoluto do material com que a lente é
feita e n1 o índice de refração absoluto
do meio onde a lente está imersa,
temos os casos resumidos na tabela:
Lentes de
bordos finos
n2 > n1 convergentes
n2 < n1
divergentes
Lentes de
bordos
espessos
divergentes
convergentes
O caso mais comum é n2 > n1:
lentes de vidro e imersas no ar.
Em geral, n3 = n1.
Os elementos geométricos importantes de uma lente esférica são:
4. LENTE DELGADA
Se a espessura da lente for
desprezível quando comparada com
os raios de curvatura R1 e R2, ela será
chamada lente delgada. Na figura
a seguir, representamos as lentes delgadas convergentes e divergentes.
O1 e O2 : centros de curvatura.
R1 e R2 : raios de curvatura.
e: espessura da lente.
O eixo definido pelos centros de
curvatura O1 e O2 constitui o eixo
principal da lente.
As três primeiras lentes
são denominadas lentes de
bordos finos e as três últimas,
lentes de bordos espessos.
3. COMPORTAMENTO
ÓPTICO DAS LENTES
Feixes de luz atravessando uma lente de
vidro imersa no ar.
2. NOMENCLATURA E TIPOS
Nomearemos as faces voltadas
para o meio exterior assinalando em
primeiro lugar a face de maior raio de
curvatura.
Quando um feixe de luz cilíndrico
incide em uma lente esférica, ele
pode ter dois comportamentos ópticos distintos:
• O feixe emergente é do tipo
cônico convergente. A lente, neste
caso, é denominada convergente;
• O feixe emergente é do tipo
cônico divergente. A lente é divergente.
A intersecção do eixo principal
com a lente delgada é um ponto O
denominado centro óptico da
lente delgada.
Além do centro óptico O, são
importantes os seguintes pontos:
F : foco principal objeto.
F': foco principal imagem.
A distância de F a O é igual à
distância de F' a O e é chamada
distância focal f.
A : ponto antiprincipal objeto.
A': ponto antiprincipal imagem.
– 139
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 140
A distância de A a O é igual à
distância de A' a O e é igual a 2f.
b) Todo raio de luz que incide na
lente numa direção que passa pelo
foco principal objeto F emerge
paralelamente ao eixo principal.
d) Todo raio de luz que incide na
lente numa direção que passa por A
emerge numa direção que passa por
A'.
F tem natureza real nas lentes convergentes.
e) Todo raio de luz que incide
obliquamente ao eixo principal emerge numa direção que passa pelo
foco secundário (F's).
Observação: Sempre que necessário, consideraremos obedecidas as condições de nitidez de
Gauss.
5. RAIOS NOTÁVEIS
a) Todo raio de luz que incide numa lente paralelamente ao eixo principal emerge numa direção que passa pelo foco principal F'.
F tem natureza virtual nas lentes divergentes.
c) Todo raio de luz que incide,
passando pelo centro óptico O, atravessa a lente sem desviar.
6. CONSTRUÇÃO GRÁFICA
DA IMAGEM DE UM
PEQUENO OBJETO
FRONTAL
q
F’ tem natureza real nas lentes convergentes.
F’ tem natureza virtual nas lentes divergentes.
140 –
Lente convergente
Objeto antes de A
Imagem: real, invertida e menor
do que o objeto (máquina fotográfica).
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 141
Objeto em A
q
Objeto em F
Imagem: real, invertida e do
mesmo tamanho do objeto.
Imagem: imprópria.
Imagem: virtual, direita e menor
do que o objeto.
Objeto entre F e O
Observações
a) Nos sistemas ópticos refratores, quando objeto e imagem são de mesma natureza,
estão posicionados em diferentes semiespaços definidos
pelo sistema.
Objeto entre A e F
Imagem: real, invertida e maior
do que o objeto (projetor de slides).
MÓDULO 21
Lente divergente
Imagem: virtual, direita e maior
do que o objeto (lupa ou lente de
aumento).
b) Nos sistemas ópticos refratores, quando objeto e imagem são de natureza diferente, estão posicionados no
mesmo semiespaço definido
pelo sistema.
Lentes Esféricas II –
Estudo Analítico e Vergência de uma Lente
1. EQUAÇÃO DE GAUSS
Sejam p e p' as abscissas do objeto e da imagem,
respectivamente. A Equação de Gauss relaciona p,
p' e f.
1
1
1
––– = ––– + –––
f
p
p'
De acordo com o sistema de eixos adotado, temos
a seguinte convenção de sinais:
p
p
p'
p'
f
f
>
<
>
<
>
<
0
0
0
0
0
0
:
:
:
:
:
:
objeto real
objeto virtual
imagem real
imagem virtual
lente convergente
lente divergente
2. AUMENTO LINEAR TRANSVERSAL
Sejam i e o as medidas algébricas das dimensões
lineares da imagem e do objeto, respectivamente, com
orientação positiva para cima.
O aumento linear transversal é, por definii
ção, o quociente ––– .
o
– 141
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 142
Desenhando o objeto sempre para cima, o será positivo. Se a imagem resultar para cima, temos i > 0: imagem
direita. Se a imagem resultar para baixo, temos i < 0:
imagem invertida.
A exemplo dos espelhos esféricos, valem as
fórmulas:
i
p’
––– = – –––
o
p
e
i
f
––– = ––––––
o
f–p
4. UNIDADE DE VERGÊNCIA
Sendo a distância focal f um comprimento, a
vergência tem dimensão do inverso do comprimento.
Sua unidade de medida é o cm–1 ou o m–1.
Esta última unidade, m–1 (inverso do metro), é a
usual na prática, recebendo a denominação de
dioptria e sendo representada por di.
5. EQUAÇÃO DE HALLEY OU DOS
"FABRICANTES DE LENTES"
A distância focal de uma lente depende
3. VERGÊNCIA DE UMA LENTE
É sabido que quanto menor é a distância focal de
uma lente, mais abruptamente ela converge ou diverge
raios de luz paralelos, isto é, "quanto menor sua
distância focal, maior é seu poder de convergir ou
divergir raios de luz".
• do material de que a lente é feita, representado
por seu índice de refração absoluto (n2);
• do meio externo que envolve a lente,
representado por seu índice de refração absoluto (n1);
• da geometria da lente, representada pelos raios
de curvatura R1 e R2.
O valor da distância focal (f) é calculado pela
Equação de Halley ou dos "fabricantes das lentes":
1
n2
––– = –––– – 1
f
n1
(
1
1
–––– + ––––
R1
R2
)(
)
Convenção de sinais:
face convexa: R > 0
face côncava: R < 0
1
face plana: –––– → 0
R
6. LENTES JUSTAPOSTAS
A lente L2 é mais convergente que a lente L1, pois,
tendo menor distância focal, converge mais abruptamente os raios de luz.
Para medir o poder de uma lente em convergir raios
de luz, define-se uma nova grandeza, que será denominada vergência ou convergência da lente.
Define-se vergência (V) de uma lente como o
inverso de sua distância focal.
1
V = –––
f
142 –
Para uma associação de lentes delgadas justapostas,
a vergência da associação é igual à soma algébrica das
vergências das lentes associadas.
Por exemplo, para duas lentes justapostas, escrevemos:
V = V1 + V2
1
1
1
––– = ––– + –––
f
f1
f2
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 143
MÓDULO 22
Óptica da Visão
1. REPRESENTAÇÃO
ESQUEMÁTICA DO OLHO
Os cones e bastonetes são as células sensoriais
da visão. Situadas
na retina, essas
células transformam a informação
luminosa
sobre
elas incidente em
informação elétrica que escoa para
o cérebro através
do nervo óptico.
Na foto acima, tem-se um aspecto de cones e bastonetes
vistos ao microscópio com ampliação de 1600 vezes.
2. ACOMODAÇÃO VISUAL
Vista lateral de
uma córnea
humana.
Nesta representação, destacamos apenas as partes mais importantes na formação das imagens, indicando sua função óptica.
O esquema apresentado é denominado "olho
reduzido".
a) Cristalino: é uma lente convergente, do tipo
biconvexa.
De um objeto real, esta lente deve produzir uma
imagem real sobre a retina.
b) Pupila: comporta-se como um diafragma,
controlando a quantidade de luz que penetra no olho.
c) Retina: é a parte sensível à luz, onde deve
formar-se a imagem. Comporta-se como um anteparo
sensível à luz.
d) Músculos ciliares: comprimem convenientemente o cristalino, alterando sua distância focal.
A distância da retina ao cristalino é constante e da
ordem de 1,5cm e corresponde à abscissa da imagem p'.
Como já ressaltamos, a abscissa p' da imagem
(distância do cristalino à retina) é constante e, como a
abscissa p do objeto assume valores distintos, conforme a particular posição do objeto visado, a equação
1
1
1
–– + –– = –– mostra-nos que a distância focal do
p’
p
f
cristalino deve ser variável.
Para cada valor de p, a distância focal f assume um
valor conveniente, para que a imagem se forme exatamente sobre a retina.
A variação da distância focal do cristalino é feita
com a intervenção dos músculos ciliares.
Sendo p' = constante, percebemos pela Equação
de Gauss que quanto menor for p (objeto mais próximo
da vista), menor deverá ser a correspondente distância
focal f.
Assim, à medida que aproximamos o objeto do
olho, os músculos ciliares comprimem o cristalino, diminuindo o raio de curvatura das faces e também a
distância focal f.
O trabalho realizado pelos músculos ciliares, de
variação da distância focal do cristalino, é denominado
"acomodação visual".
3. PONTO REMOTO E PONTO PRÓXIMO
Ponto remoto (PR) é o ponto mais afastado que
o olho vê com nitidez, estando os músculos ciliares
relaxados.
– 143
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 144
Ponto próximo (PP) é o ponto
mais próximo da vista para a qual a
imagem é nítida, estando os músculos ciliares com máxima contração.
Para que um objeto possa ser
visto com nitidez, ele deve situar-se
entre o ponto próximo e o ponto remoto do olho. A região do espaço compreendida entre tais pontos é denominada zona de acomodação.
nítida na retina, com os músculos ciliares relaxados (condições de visão
mais cômoda).
PRM = ponto remoto do olho míope.
d: distância mínima de visão distinta.
D: distância máxima de visão distinta.
Para o olho normal, o ponto remoto está no infinito (D → ∞) e o
ponto próximo está a uma distância
convencional d = 25cm.
D = distância máxima de visão
distinta do olho míope.
P' = imagem nítida do ponto remoto sobre a retina.
Como a distância focal máxima
do cristalino está sendo demasiado
pequena, isto é, sua vergência é
maior do que a ideal, a correção é
feita com o uso de uma lente divergente.
Tal lente divergente deve fornecer, de um objeto impróprio, uma
imagem virtual no ponto remoto do
olho. Esta imagem virtual se comporta como objeto real para o olho,
dando uma imagem final real e nítida
sobre a retina.
O problema do hipermetrope não
é a visão de objetos distantes, pois,
com uma acomodação conveniente,
a distância focal do sistema é reduzida, possibilitando a visão nítida do
objeto impróprio.
A dificuldade reside no afastamento do ponto próximo.
A distância focal mínima do sistema é maior do que deveria ser, fazendo com que a visão de objetos próximos não seja possível com nitidez.
Nesse caso, a vergência do sistema deve ser aumentada, com o uso
de uma lente corretiva convergente. Tal lente convergente deve
fornecer, de um objeto real, situado
no ponto próximo do olho normal,
uma imagem virtual, no ponto próximo do olho hipermetrope. Esta imagem se comporta como objeto real
para o olho, dando uma imagem
final nítida sobre a retina.
4. MIOPIA
A miopia é um defeito da visão
que consiste em um alongamento do
globo ocular.
Há um afastamento da retina em
relação ao cristalino, e com isso a
imagem de um objeto impróprio se
forma aquém da retina, e portanto
não é nítida.
De um objeto impróprio, a lente
corretiva divergente dá uma imagem
em seu foco imagem; como tal imagem vai ser objeto para o olho, ela
deverá coincidir com o ponto remoto
do olho míope (PRM ≡ F').
A lente corretiva tem distância focal f = – D , em que D é a distância máxima da visão distinta para o
olho míope.
PPN = ponto próximo do olho
normal (emetrope).
PPH = ponto próximo do olho hipermetrope.
Sendo d = 25cm a distância mínima de visão distinta para o olho normal, dH a distância mínima de visão
distinta para o olho hipermetrope e f
a distância focal da lente corretiva,
teremos:
p = d = 25cm
Para o míope, o ponto remoto está a uma distância finita, maior ou
menor, conforme o grau de miopia.
Quando o objeto está no ponto
remoto do míope, a imagem forma-se
144 –
5. HIPERMETROPIA
A hipermetropia é um defeito da
visão que consiste num encurtamento do globo ocular.
p' = -dH (imagem virtual)
1
1
1
–– = ––– – –––
f
25
dH
(CGS)
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 145
MÓDULO 23
Noções Gerais de Ondas
1. CONCEITO DE ONDA
Dizemos que um meio sofre uma
perturbação quando qualquer
uma das propriedades físicas associadas a um de seus elementos de
volume é alterada.
Se a perturbação se estender a
outros elementos de volume do meio,
originar-se-á uma onda.
Dizemos, então, que:
Onda é qualquer perturbação que se propaga através
de um meio.
É o caso, por exemplo, das ondas
esquematizadas ao lado, que, ao atingirem a rolha, fazem com que esta
execute um movimento de sobe-e-desce, sem que seja arrastada para a direita.
3. NATUREZA DAS ONDAS
q
Ondas mecânicas
São perturbações mecânicas
que se propagam através das partículas de um meio material.
Exemplos
Ondas numa corda, ondas na superfície da água, ondas numa mola,
o som etc.
O som constitui-se de ondas mecânicas que se podem propagar em
meios sólidos, líquidos e gasosos.
É importante destacar que as ondas mecânicas não se propagam no
vácuo.
Assim:
Representação esquemática de uma onda eletromagnética.
Resumindo:
A luz é onda eletromagnética que se propaga no vácuo
e em alguns meios materiais. Sua velocidade no vácuo vale 3,0 . 108m/s.
O som não se propaga no
vácuo.
q
No exemplo acima, a pessoa dá
um solavanco na extremidade esquerda da corda, produzindo uma onda
que se propaga através da mesma.
2. PROPRIEDADE
FUNDAMENTAL DAS
ONDAS
Uma onda transmite energia,
sem propagação de matéria.
Ondas eletromagnéticas
Constituem-se do conjunto de um
campo elétrico e um campo magnético, variáveis e perpendiculares entre
si, que se propagam no vácuo e também em alguns meios materiais.
Exemplos
Ondas de rádio e TV, microondas,
infravermelho, luz, ultravioleta, raios X
etc.
As radiações eletromagnéticas
propagam-se no vácuo com a maior
velocidade fisicamente concebível:
c = 3,0 . 105km/s = 3,0 . 108m/s
Os raios X têm grande utilização na medicina como, por exemplo, no diagnóstico e avaliação de fraturas ósseas. Essas radiações se propagam através dos
músculos, mas são bloqueadas pelos
ossos. Assim, utilizando-se chapas sensíveis aos raios X, é possível fazer uma
“foto” de partes do corpo de uma pessoa
na qual ficam evidenciados os ossos
com seus possíveis problemas.
4. ONDAS QUANTO ÀS
DIREÇÕES DE VIBRAÇÃO
E PROPAGAÇÃO
q
Ondas longitudinais
A direção de vibração coincide
com a de propagação.
– 145
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 146
q
Ondas mistas
Têm caráter longitudinal e transversal.
Na mola acima, a onda representada é longitudinal, pois, enquanto a
propagação ocorre da esquerda
para a direita, as partículas vibram
horizontalmente, isto é, na mesma
direção.
São também longitudinais as ondas sonoras nos meios fluidos (líquidos ou gasosos).
As ondas nas superfícies líquidas são mistas.
5. ONDAS QUANTO À
FRENTE DE ONDA E À
DIMENSÃO
q
q
Ondas transversais
A direção de vibração é perpendicular à de propagação.
A frente de onda é um
ponto
Podemos observar na superfície
da água ondas circulares ou retas.
Em ambos os casos, a frente de onda
é uma “linha” e, por isso, essas ondas são bidimensionais.
q
A frente de
onda é uma superfície
ONDAS TRIDIMENSIONAIS
ONDAS UNIDIMENSIONAIS
Uma onda se propagando ao
longo de uma corda tem por frente
de onda um “ponto”, o que significa
que essa onda é unidimensional.
q
A frente de onda é uma
linha
ONDAS BIDIMENSIONAIS
Na corda acima, a onda representada é transversal, pois, enquanto
a propagação ocorre da esquerda
para a direita, as partículas vibram
verticalmente, isto é, na direção perpendicular.
São também transversais todas
as radiações eletromagnéticas, inclusive a luz.
146 –
As ondas luminosas emitidas, por
exemplo, por um palito de fósforo aceso propagam-se em todas as direções
em torno do palito. Isso mostra que as
frentes de onda são “superfícies” (no
caso, superfícies esféricas) e, por isso, essas ondas são tridimensionais.
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 147
MÓDULO 24
Equação Fundamental da Ondulatória V = λf
1. PERÍODO, FREQUÊNCIA, AMPLITUDE E
COMPRIMENTO DE ONDA
Suponhamos que um homem, segurando uma das
extremidades de uma corda tensa, passe a movimentar
ritmadamente sua mão para cima e para baixo.
Se a unidade de tempo for o segundo (s), decorrerá
que:
1
unid (f) = –– = s–1 = hertz (Hz)
s
Recordemos que:
1kHz = 103Hz, 1MHz = 106Hz e 1GHz = 109Hz
Admitamos que o intervalo de tempo decorrido em
um sobe e desce da mão seja sempre constante e que
a altura da posição mais alta da mão em relação à
posição mais baixa seja invariável.
Esses movimentos cadenciados da mão do homem
produzirão uma sucessão de ondas senoidais que
percorrerão a corda com velocidade de intensidade V,
conforme ilustra o esquema acima.
Chama-se período (T) da onda o intervalo
de tempo necessário para que um ponto
vibrante realize um ciclo completo.
No caso do exemplo, o período da onda é igual ao
intervalo de tempo gasto pela mão do homem para executar uma oscilação, isto é, um sobe e desce completo.
Chama-se frequência (f) da onda o número de
ciclos realizados por um ponto vibrante numa
unidade de tempo.
Matematicamente:
n
f = ––––
Δt
Se n = 1 ciclo, teremos Δt = T. Assim:
1
1
f = ––– ou T = –––
T
f
Chama-se amplitude (A) da onda a distância de uma crista ou um vale ao nível de
equilíbrio.
Chama-se comprimento de onda (λ) a distância percorrida pela perturbação durante um período.
Referindo-nos ao exemplo da corda, podemos dizer
que o comprimento de onda λ é a distância entre duas
cristas ou entre dois vales consecutivos.
É evidente que a distância entre uma crista e um vale
consecutivos equivale a meio comprimento de onda (λ/2).
2. RELAÇÃO
FUNDAMENTAL DA ONDULATÓRIA
Geralmente, uma onda propaga-se em movimento
uniforme, valendo a relação:
Δs
V = ––––
Δt
Recordando que durante um período (T) a perturbação
percorre um comprimento de onda (λ) e que a frequência
(f) é o inverso do período, podemos escrever que:
λ
V = –––– = λ f
T
– 147
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 148
FRENTE 3
Eletricidade
MÓDULO 19
Campo Magnético do Condutor Retilíneo e da Espira
1. CAMPO MAGNÉTICO
NO CENTRO DE UMA ESPIRA CIRCULAR
q
Módulo
É dado pela equação:
µ.i
B = ––––––
2R
Vejamos as características do vetor indução magnética, no centro da espira (Fig. 1).
q
Direção
É perpendicular ao plano da espira.
,
na qual:
µ = permeabilidade magnética do meio interno à
espira.
i = intensidade da corrente.
R = raio da espira.
2. CAMPO MAGNÉTICO NO
INTERIOR DE UM SOLENOIDE RETILÍNEO
Fig. 1 – No centro da espira, o campo magnético tem direção
perpendicular ao plano da espira.
q
Sentido
É dado pela regra da mão direita (Fig. 2).
O solenoide retilíneo é um fio condutor enrolado em
forma de hélice. É muito semelhante à mola helicoidal
da sua apostila.
Também ele é formado por n espiras idênticas,
porém elas não são justapostas, mas ligeiramente afastadas.
Fig. 2 – Regra da mão direita.
Dispõe-se o polegar indicando o sentido do campo
→
magnético (vetor B), e os demais dedos indicam, curvadamente, o sentido da corrente elétrica (i).
Exemplos (Figuras 3a e 3b)
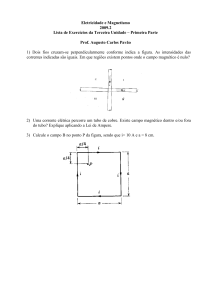
Imagine uma espira percorrida por corrente elétrica.
Na figura 3a, ela tem o sentido anti-horário e na 3b,
horário.
Disponha os quatro dedos em curva, no sentido da
→
corrente elétrica e o seu polegar lhe dará o sentido de B.
Fig. 3a e 3b – Campo magnético de uma espira percorrida
por corrente elétrica.
148 –
O solenoide.
Ao ser percorrido por corrente elétrica, o solenoide
gera um campo magnético. Dentro do solenoide, as linhas de indução são praticamente retas paralelas, significando que o campo magnético é semelhante ao produzido por um ímã em forma de barra.
Quanto mais longo o solenoide, mais fraco torna-se
o campo externo e mais uniforme torna-se o campo interno.
Por extensão, denominaremos por solenoide ideal
aquele de comprimento infinito e cujo campo interno é
perfeitamente uniforme. No solenoide ideal, não existe
campo externo.
Na prática, obtém-se um campo magnético uniforme no interior do solenoide sempre que o seu comprimento ᐉ for muito maior que o raio (R) de uma espira.
Ou seja: ᐉ >>R.
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 149
O campo magnético no interior do solenoide.
q
Características
do campo magnético
no interior do solenoide
a) Direção
É a mesma do eixo do solenoide reto ou sempre
perpendicular ao plano das espiras deste.
As linhas de indução entram por uma face e saem pela outra.
Nos ímãs em forma de barra, ocorre o mesmo
processo com o campo magnético. As linhas “nascem”
no polo norte e “morrem” no polo sul.
b) Sentido
É dado pela regra da mão direita.
As linhas de indução do ímã.
Por analogia, às faces de uma espira podemos atribuir dois polos: um norte e o outro sul.
Regra da mão direita no solenoide.
Envolva o solenoide com a mão direita de modo que
a ponta dos dedos indique o sentido da corrente e o po→
legar indique o sentido de B).
c) Módulo
É dado pela equação:
Polos de uma espira.
q
µ . n .i
B = ––––––––
ᐉ
,
na qual:
µ = permeabilidade do material no interior do solenoide.
i = intensidade da corrente.
n = número de espiras contidas no comprimento ᐉ
do solenoide.
Regra prática
Quando, numa espira, a corrente elétrica circula no
sentido horário, trata-se de uma face SUL.
Quando a corrente elétrica circula no sentido antihorário, trata-se de uma face NORTE.
A justificativa é simples. Observe na figura a, pela
regra da mão direita, que o campo magnético está
penetrando no centro da espira. Na figura b, em que a
corrente circula no sentido anti-horário, o campo magnético está saindo do centro da espira.
3. POLOS DE UMA ESPIRA
No desenho das linhas de indução do campo magnético produzido por uma espira, notamos que as linhas
de indução entram por uma face e saem pela outra (Fig.
a e b).
Polo sul.
Polo norte.
– 149
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 150
4. POLOS DE UM SOLENOIDE
Do mesmo modo que atribuímos a polaridade norte
e sul às faces da espira, devemos fazê-lo aos extremos
de um solenoide e também de uma bobina chata.
Usando a regra da mão direita, determinamos o
polo de entrada e o de saída do campo magnético. Por
analogia com o ímã, podemos escrever: “nasce” no
norte e “morre” no sul.
q
Atração e repulsão
A mesma regra enunciada para os polos dos ímãs
também se verifica entre os polos de espiras, bobinas e
solenoides.
Polos do mesmo nome repelem-se.
Polos de nomes contrários atraem-se.
Polaridade de um solenoide.
MÓDULO 20
Indução Eletromagnética
1. FLUXO DO VETOR INDUÇÃO MAGNÉTICA
2. CASOS PARTICULARES
Observe que na figura (2a), em que a superfície da
espira é perpendicular ao campo, ela é atravessada
pelo maior número possível de linhas de indução e o
fluxo magnético é o máximo; na figura (2b), nenhuma linha atravessa a superfície da espira e o fluxo magnético
é nulo.
Desse modo, podemos interpretar fisicamente o fluxo magnético como sendo o número de
linhas de indução que atravessa a superfície
da espira.
Fig. 1
Consideremos uma espira de área A colocada
→
dentro de um campo magnético B , de tal forma que a
→
normal (n ) à superfície da espira faça ângulo α com as
linhas de indução. (Fig. 1)
Fig. 2a.
→
Define-se fluxo do vetor indução B , através da
espira, como sendo a grandeza escalar dada por
Φ = B . A . cos α
No Sistema Internacional de Unidades, a unidade de
fluxo magnético, denomina-se weber (símbolo Wb).
Da definição de fluxo magnético, resulta
Wb
1 Wb = 1 T . 1m2 → T = –––––
m
150 –
Fig. 2b.
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 151
3. INDUÇÃO ELETROMAGNÉTICA
Vamos considerar uma espira ligada a um
galvanômetro de zero central e um ímã. Com essa montagem, podemos efetuar as seguintes observações:
1.a) Se o ímã é mantido imóvel, o galvanômetro
não indica passagem de corrente (Fig. 3).
Quando o fluxo magnético varia através da
superfície de uma espira, surge nela uma
corrente elétrica denominada corrente
induzida.
Esse é o fenômeno da indução eletromagnética.
Obs.: se a espira estiver aberta, a variação de fluxo
magnético determina entre seus extremos uma d.d.p.
induzida.
Na prática, em vez de uma espira, usa-se uma
bobina, com a qual se multiplica o efeito.
4. SENTIDO DA CORRENTE
INDUZIDA – LEI DE LENZ
Fig. 3 – Estando o ímã parado, não há corrente na espira.
2.a) Se o ímã se aproxima da espira, aparece
corrente elétrica num certo sentido, que cessa quando
paramos o ímã (Fig. 4).
A Lei de Lenz afirma que
O sentido da corrente induzida é tal que
seus efeitos se opõem às causas que a originam.
Exemplo
Ao aproximarmos da espira o polo norte do ímã
(causa), surge na espira um polo norte que se opõe à
aproximação do ímã. Desse modo, a corrente induzida
tem sentido anti-horário, em relação ao observador O.
Fig. 4 – Ao aproximarmos o ímã da espira, esta é percorrida
por uma corrente elétrica em determinado sentido.
3.a) Se o ímã for afastado da espira, a corrente
muda de sentido (Fig. 5).
Fig. 6.
Ao afastarmos da espira o polo norte do ímã
(causa), surge na espira um polo sul que se opõe ao
afastamento do ímã. Deste modo, a corrente induzida
tem sentido horário, em relação ao observador O.
Fig. 5 – Ao afastarmos o ímã da espira, esta é percorrida por
uma corrente de sentido oposto ao da corrente produzida ao
aproximarmos o ímã.
4.a) Quanto mais rapidamente o ímã for movimentado, tanto mais intensa será a corrente.
Ao aproximarmos ou afastarmos o ímã da espira,
varia o número de linhas de indução que atravessa a
superfície da espira, isto é, varia o fluxo magnético
através da superfície da espira. Nesses casos, o
ponteiro do galvanômetro sofre deflexão, indicando
que a espira é percorrida por corrente elétrica. Assim, podemos concluir que
Fig. 7.
– 151
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 152
Nas figuras 8a e 8b, indicamos o sentido da corrente induzida na espira quando o polo sul do ímã é aproximado e depois afastado.
Fig. 8.
Há ainda outra maneira de apresentarmos a Lei de
Lenz.
O sentido da corrente induzida é tal que
origina um fluxo magnético induzido que se
opõe à variação do fluxo magnético indutor.
Esquematicamente, sendo Φ o fluxo magnético
indutor e Φ' o fluxo magnético induzido (criado pela corrente induzida), temos
MÓDULO 21
Fig. 9 – Ao aproximarmos o ímã, Φ cresce.
O fluxo induzido Φ’ surge opondo-se ao aumento de Φ.
A regra da mão direita fornece o sentido de i.
Eletrostática: Eletrização por Atrito, Contato e Indução
1. INTRODUÇÃO
A Eletrostática estuda os fenômenos que ocorrem
com cargas elétricas em repouso, em relação a um
dado sistema de referência.
Como vimos na Eletrodinâmica, a carga elétrica é
uma propriedade associada a certas partículas elementares, tais como prótons e elétrons.
Verifica-se que tais partículas possuem as
seguintes cargas elétricas:
próton + 1,6 . 10–19 C
––––––––––––––––––––––––––––––––
elétron – 1,6 . 10–19 C
Fig. 1 – Corpo neutro.
Dizemos que um corpo está eletrizado negativamente quando possui um número de elétrons maior
que o de prótons.
Nesse caso, há excesso de elétrons no corpo.
2. CORPO ELETRIZADO
De uma maneira geral, os corpos com os quais
lidamos cotidianamente são neutros, isto é, possuem
igual quantidade de prótons e de elétrons (Fig. 1).
152 –
Fig. 2 – Corpo eletrizado negativamente.
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 153
Dizemos que um corpo está eletrizado positivamente quando possui um número de elétrons
inferior ao de prótons. Nesse caso, há falta de elétrons
no corpo.
∑ Q = (+ 5) + (– 8) = – 3
Após algum tempo, devido a trocas internas
Fig. 3 – Corpo eletrizado positivamente.
3. PRINCÍPIOS DA ELETROSTÁTICA
q
Sistema eletricamente isolado
Não troca cargas elétricas com o meio exterior.
q
Princípios
São leis básicas que se verificam na prática, cujas
demonstrações teóricas não são possíveis por serem as
primeiras leis relativas ao assunto.
•
Princípio da atração e repulsão
Cargas elétricas de mesmo sinal repelem-se (Fig. 4).
∑ Q = (– 1) + (– 2) = – 3
Observemos que variou a quantidade de cargas de
cada um deles, porém não se alterou a soma algébrica.
∑ Q = – 3 permaneceu constante.
Obs.: uma decorrência imediata do princípio de
repulsão de cargas homônimas é que, num corpo constituído de material condutor, as cargas em excesso
ficam na sua superfície externa (Fig. 6).
Fig. 4.
Cargas elétricas de sinais contrários atraem-se (Fig. 5).
Fig. 5.
•
Princípio da conservação das cargas
elétricas
Em um sistema eletricamente isolado, a soma
algébrica de cargas elétricas (positivas e negativas)
per manece constante, ainda que se verifique
variação de quantidade das cargas positivas e das
negativas.
Exemplo: temos, em um sistema isolado, inicialmente
Fig. 6 – Cargas em excesso permanecem na superfície externa do condutor.
4. PROCESSOS DE ELETRIZAÇÃO
São processos de eletrização mais comuns: atrito,
contato e indução.
– 153
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 154
q
Eletrização por Atrito
Se atritarmos dois corpos constituídos de materiais
diferentes, um deles cederá elétrons ao outro (Fig. 7).
q
Eletrização por contato
Se encostarmos um corpo neutro, constituído de
material condutor (sólido metálico, por exemplo), em um
outro corpo eletrizado, haverá passagem de elétrons de
um corpo para o outro e o corpo neutro ficará eletrizado
(Fig. 8).
Fig. 7a.
Fig. 8a.
Fig. 7b.
Fig. 8b.
Fig. 7c.
•
Série triboelétrica
A série triboelétrica é uma sequência ordenada de
substâncias que nos dá o sinal da carga que cada
corpo adquire.
Fig. 8c.
•
Caso particular
Se ambos os corpos, (A) e (B), forem esféricos, do
mesmo tamanho e constituídos de metal, após o contato, cada um deles ficará com metade da carga total
inicial (Fig. 9).
154 –
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 155
Elétrons de B foram atraídos e “povoaram” a região
esquerda do corpo B, ao passo que prótons foram mantidos, por repulsão, na região direita de B.
Se ligarmos à terra, ou mesmo tocarmos o dedo em
B, haverá subida de elétrons (ou passagem de elétrons),
como mostra a Fig. 2.
Fig. 9a.
Fig. 2 – Ligando o induzido à terra.
Se desligarmos o fio-terra na presença do indutor,
então as cargas do induzido se manterão.
Fig. 9b.
q
Eletrização por indução
Indução é uma separação de cargas elétricas
que ocorre em um corpo condutor, sem que ele tenha
tocado outro corpo, mas apenas tenha sido colocado
nas proximidades de um corpo eletrizado (Fig. 1).
Fig. 3 – Desligando o fio-terra na presença do indutor.
Convém observar o seguinte:
1.o) Na indução, os corpos “terminam” com
cargas elétricas de sinais contrários.
Indutor
Induzido
positivo
negativo
negativo
positivo
Fig. 1a.
2.o) Após o término da indução, ou mesmo durante
ela, verifica-se uma atração entre o indutor e o induzido.
Fig. 1b.
Ao aproximarmos o corpo B (condutor, neutro) do
corpo A, eletrizado, as cargas elétricas do primeiro separam-se e ocorre a indução eletrostática.
Fig. 4.
– 155
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 156
3.o) Na eletrização por contato, os corpos “terminam” com cargas de mesmo sinal.
4.o) Na eletrização por atrito, os corpos “terminam” com cargas de sinais opostos.
5
O ELETROSCÓPIO DE FOLHAS
O eletroscópio é um aparelho que se usa para
detectar a presença de cargas elétricas num corpo.
Fig. 5b – Eletroscópio na presença de cargas elétricas.
Fig. 5a – Eletroscópio de folhas, longe de cargas elétricas.
MÓDULO 22
Força Eletrostática
1. INTRODUÇÃO
2. LEI DE COULOMB
Consideremos duas cargas puntifor mes q e Q
separadas uma da outra por uma distância d e situadas
no vácuo.
A intensidade da força eletrostática depende dos
seguintes fatores:
Entre elas, existe uma força eletrostática que pode
ser de atração ou de repulsão, conforme os sinais das
cargas (Fig. 1).
1.o)
da distância que separa as partículas;
2.o)
das quantidades de eletricidade q e Q;
3.o)
do meio em que as partículas se encontram.
Geralmente, o meio é o vácuo, a menos que se
mencione o contrário.
A Lei de Coulomb diz:
Fig. 1 – Entre as cargas, existe a força eletrostática.
156 –
A intensidade da força eletrostática entre
as duas cargas é diretamente proporcional
ao produto delas e inversamente proporcional ao quadrado da distância que as separa.
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 157
4. GRÁFICO DA FORÇA ELETROSTÁTICA
|q|.|Q|
F = K0 –––––––––––– (1)
d2
Na expressão anterior, K0 é uma constante de
proporcionalidade, denominada constante eletrostática do vácuo.
Mantidos os valores de q e Q e supondo o meio o
vácuo, vamos construir uma tabela, variando o valor de
d.
No SI, o seu valor é
K0 = 9,0 . 109 N.m2/C2
d
F
2d
F/4
3d
F/9
4d
F/16
Em outros meios, a constante eletrostática será
indicada apenas por K e seu valor é menor do que K0.
Assim, temos o gráfico.
Neste caso, temos
|q|.|Q|
F’ = K –––––––––––– (2)
d2
Mantidos os valores de q, Q e d e sendo K < K0 ,
resulta de (1) e (2): F’ < F.
3. UNIDADES IMPORTANTES DO SI
q Q d F
K
unidades
C C m N N . m2/C2
do SI
MÓDULO 23
Campo Elétrico
1. INTRODUÇÃO
Chamamos de carga de prova (q) a uma partícula
eletrizada ou corpo puntiforme eletrizado que se utiliza
para verificações e observações (sondagens).
Fig.2 – Na região R, há um campo elétrico.
Fig.1 – O pesquisador e a carga de prova (q).
2. CONCEITO DE CAMPO ELÉTRICO
Dizemos que numa região do espaço há um campo
elétrico quando, ao sondarmos a região com a carga
de prova, notamos o aparecimento de uma força
eletrostática agindo na carga de prova.
3. ONDE ENCONTRAMOS
O CAMPO ELÉTRICO
Os campos elétricos são encontrados em torno dos
corpos eletrizados.
Por exemplo: fixemos uma esfera de alumínio,
eletrizada, sobre um pedestal. Em torno dela, haverá um
campo elétrico e isso se confirma na sondagem com a
carga de prova.
– 157
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 158
→
2.o) Quando a carga de prova (q) for positiva, F
e E têm o mesmo sentido.
→
→
3.o) Quando a carga de prova (q) for negativa, F e
E têm sentidos opostos.
→
Fig.3 – Na região que envolve a esfera fixa, há um campo
elétrico.
→
→
Fig.5 – Sentido de F e de E com relação ao sinal de (q).
4. ANALOGIA
O campo elétrico de uma esfera é análogo ao
campo gravitacional de um planeta.
Envolvendo o planeta, há um campo de forças dito
“campo gravitacional”. Se usarmos um objeto qualquer
como “corpo de prova”, o planeta o atrairá, transmitindo-lhe uma força gravitacional.
Envolvendo uma esfera eletrizada, há um campo
eletrostático. Se aproximarmos dela uma carga de prova, a esfera a atrairá (ou a repelirá), transmitindo-lhe
uma força eletrostática.
Tanto o gravitacional como o campo elétrico são
campos de força.
→
5. VETOR CAMPO ELÉTRICO: E
Para melhor definir a direção, o sentido e a
→
intensidade do campo elétrico, definimos um vetor E,
denominado vetor campo elétrico.
→
Para tanto, seja F a força eletrostática do campo
elétrico sobre a carga de prova q nele colocada (Fig. 4).
6. MÓDULO OU INTENSIDADE
DO VETOR CAMPO ELÉTRICO
Fixemos uma carga puntiforme Q. Em sua volta, há
um campo elétrico.
Coloquemos uma carga pontual q a uma distância
d de Q.
Sobre (q), bem como sobre (Q), aparece uma força
eletrostática.
Temos
→
→
F
F
E = –––– ⇒ E = –––––
q
|q|
(1)
Sendo
|q|.|Q|
F = K0 ––––––––––
d2
(2)
Vamos substituir (2) na (1):
Fig. 4 – Carga de prova no campo elétrico.
q
Definição
→
→
F
E = ––––
q
ou
→
→
F =q.E
|q| |Q|
K0 –––––––
d2
E = –––––––––––––
|q|
Por cancelarmos q, afirmamos que o módulo do
vetor campo independe da carga de prova. Restará
Convém observar que
1.o)
158 –
→
→
F e E são vetores de mesma direção.
|Q|
E = K0 ––––––
d2
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 159
Observação
A unidade provisória do campo eletrostático, no SI,
é newton por coulomb.
→
2.a) Não devemos dizer que os vetores E da Fig. 6
estão "repelindo" os pontos P. Analogamente, eles não
os estão atraindo na Fig. 7.
→
3.a) O vetor campo elétrico E não é uma força, mas
apenas uma representação simbólica de uma direção e
um sentido de um agente transmissor de força.
7. SENTIDO DO VETOR CAMPO ELÉTRICO
O seu sentido dependerá exclusivamente do sinal
da "carga-fonte" (Q).
a) Quando a "carga-fonte" Q for positiva, o campo
elétrico será de afastamento. Os vetores campo
elétrico apontarão "para fora", isto é, são centrífugos em
relação à carga-fonte.
8. GRÁFICO DO CAMPO ELÉTRICO
Variando-se a distância d, varia a intensidade E do
vetor campo elétrico. O gráfico de E em função de d é
um ramo de uma hipérbole cúbica, conforme indica a
Fig. 8.
Fig.6 – Campo de afastamento para Q > 0.
b) Quando a "carga-fonte" Q for negativa, o campo
elétrico será de aproximação. Os vetores campo
elétrico apontarão para o centro da carga-fonte.
Fig. 8.
Já o gráfico de E em função de d2 é um ramo de
“hipérbole equilátera” (Fig. 9).
Fig. 7 – Campo de aproximação para Q < 0.
Observações
→
1.a) Quando representamos um ponto P e um vetor E ,
é bom ressaltar que, mesmo não havendo carga em P, há
um campo elétrico no local.
Fig. 9.
– 159
C3_3a_Soroc_Fis_Teo_alelex_2014 12/02/14 10:45 Página 160
MÓDULO 24
Campo Elétrico Resultante
Quando várias cargas são geradoras de um mesmo campo elétrico,
então, em cada ponto do campo, o
vetor campo elétrico resultante será a
soma dos vetores produzidos pelas
cargas individualmente.
O módulo do vetor campo elétrico resultante é dado pela expressão
1. CAMPO ELÉTRICO
GERADO POR DUAS
CARGAS PUNTIFORMES
Observação: se as cargas fossem ambas positivas ou ambas negativas, apenas mudariam
a direção
→
e o sentido do vetor Eres.
Na figura (a) a seguir, temos
duas partículas eletrizadas com cargas elétricas positivas e iguais a + Q
e na figura (b) as partículas estão
eletrizadas com cargas elétricas +Q
(positiva) e –Q (negativa). Elas estão
situadas nos vértices A e B de um
triângulo equilátero. Nas figuras representamos
os vetores campo par→
→
ciais EA e EB, ambos de mesmo módulo E e o vetor campo resultante
→
Eres.
Sejam as cargas puntiformes Q1
e Q2, de sinais opostos, criando campo elétrico em P.
A carga positiva (Q1) gera em P
→
um vetor campo elétrico (E1) de afastamento.
A carga negativa (Q2) gera em
→
P um vetor campo elétrico (E2 ) de
aproximação.
O vetor campo elétrico resultante
→
em P (E res) será dado pela soma ve→
→
torial de E1 e E2.
Eres =
E21 + E22 + 2 . E1 . E2 cos α
→
→
→
Eres = E1 + E2
Fig b.
EA = EB = E
Eres = E
2. CAMPO ELÉTRICO
GERADO POR N CARGAS
PUNTIFORMES
Sejam agora n cargas puntiformes, Q1, Q2, Q3, …, Qn, criando
campo elétrico em um ponto P.
As cargas negativas criarão, in→
dividualmente, vetores (E j) de aproximação.
As cargas positivas→criarão, individualmente, vetores (E i) de afastamento.
O vetor campo elétrico resultante
será dado pela soma vetorial de
todos os vetores parciais.
→
→
→
→
→
Eres = E1 + E2 + E3 + ... + En
Cada campo parcial tem intensidade dada por
|Q1|
E1 = K . ––––
d12
|Q2|
E2 = K . ––––
d22
160 –
Fig a.
EA = EB = E
Eres = E . 3