9º Congresso Latino-Americano de Orgãos Artificiais e Biomateriais
13º Congresso da Sociedade Latino Americana de Biomateriais, Orgãos Artificiais e Engenharia de Tecidos - SLABO
24 a 27 de Agosto de 2016, Foz do Iguaçu, PR
DESENVOLVIMENTO DE APLICAÇÃO EM TEMPO REAL DO ACIONAMENTO
DO MOTOR SEM ESCOVAS DO SIMULADOR HÍBRIDO DO SISTEMA
CARDIOVASCULAR
F.F.C. Monteiro1, J. Fonseca2, A. Andrade3, B. Utiyama4, E. Drigo5, E. P. Bock6, L. L.
Miguel7, J. Fontenele8, A. Henrique9, T. Leão10
1
Graduando em Engenharia de Controle e Automação, Bolsista PIBIFSP, IFSP, Câmpus São Paulo,
[email protected].
2
Doutor em bioengenharia, Instituto Dante Instituto Dante Pazzanese de Cardiologia / Universidade São Judas
Tadeu, [email protected]
3
Doutor em bioengenharia, Instituto Dante Pazzanese de Cardiologia / Universidade de São Paulo,
[email protected]
4
Mestre em bioengenharia, Instituto Dante Pazzanese de Cardiologia, [email protected]
5
Mestre em bioengenharia, Instituto Dante Pazzanese de Cardiologia, [email protected]
6
Doutor em bioengenharia, Instituto Federal de Educação, Ciência e Tecnologia de São Paulo,
[email protected]
7 Graduando em Engenharia de Controle e Automação, Bolsista PIBIFSP,
IFSP, Câmpus São Paulo,
[email protected].
8 Graduando em Engenharia de Controle e Automação, Bolsista PIBIFSP,
IFSP, Câmpus São Paulo,
[email protected].
9 Graduando em Engenharia Eletrônica, Bolsista PIBIFSP, IFSP, Câmpus São Paulo, [email protected].
10 Doutor em bioengenharia, IFSP, Câmpus São Paulo, [email protected].
Área de conhecimento (Tabela CNPq): Controle de Processos Eletrônicos, Retroalimentação– 3.04.05.03-3
RESUMO: Desenvolver o controle do motor sem escovas (BLDC, brushless) que aciona o
Simulador Híbrido do Sistema Cardiovascular (SHSC) em plataforma de tempo real. O
SHSC é uma ferramenta numérica e física (híbrida) do tipo “hardware in-the-loop” totalmente
parametrizada de alta flexibilidade. O problema abordado no trabalho é a substituição do
módulo de comando do simulador utilizando hardware dedicado ao motor BLDC pelo
controle em tempo real da velocidade. A metodologia de desenvolvimento do controle
utilizou técnica clássica de controle, o controle proporcional-integral. A função de
transferência do sistema foi obtida experimentalmente. Foi realizada em programa de
computador Labview e compilada para a plataforma em tempo real. O tempo de
acomodação e o erro estacionário foram 0,06s e 5%, respectivamente. A operação do
SHSC foi satisfatória para reproduzir as condições do sistema cardiovascular, inclusive em
condições de insuficiência cardíaca.
PALAVRAS-CHAVE: Hardware in the loop, Automação, Coração, Simulador, Sistema
Cardiovascular
INTRODUÇÃO
O desenvolvimento e a aplicação de dispositivos que auxiliem o bombeamento de
sangue (DAV – Dispositivo de Assistência Ventricular) é de grande importância. Contudo,
estes devem possuir características adequadas ao bombeamento de sangue, evitando
“prejudicar” ao invés de auxiliar o organismo debilitado, além do que a confiabilidade do
sistema como um todo é relevante na aplicação. (Dinkhuysen, 2002).
40
9º Congresso Latino-Americano de Orgãos Artificiais e Biomateriais
13º Congresso da Sociedade Latino Americana de Biomateriais, Orgãos Artificiais e Engenharia de Tecidos - SLABO
24 a 27 de Agosto de 2016, Foz do Iguaçu, PR
O desenvolvimento destes dispositivos passa pelo projeto e construção do protótipo,
avaliação em bancada - “in vitro”, avaliação com animais - “in vivo”, avaliação clínica e
finalmente a liberação para o uso (Nosé, et al., 1999).
Assim, a disponibilidade de uma ferramenta de simulação que possua características
adequadas ao desenvolvimento de dispositivos de assistência ventricular pode reduzir a
quantidade de experimentações “in vivo”, ao mesmo tempo em que possibilita avaliar e
realizar ações específicas durante o processo de ajuste do sistema de controle do
dispositivo (Timms & et al, 2005).
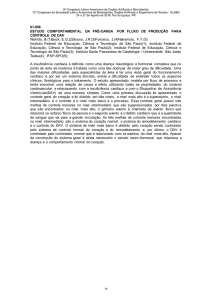
O sistema cardiovascular foi modelado a parâmetros concentrados por quatro
compartimentos, sendo um deles construído fisicamente (seção física) e os outros três de
forma computacional (seção numérica). Os compartimentos numéricos compreendem um
conjunto bomba cardíaca (átrio e ventrículo) e estruturas vasculares (artéria, resistência e
veia). O compartimento físico compreende a outra bomba cardíaca (modelada por um átrio
passivo e uma câmara ventricular ativa) e as estruturas artéria e resistência (sistêmica ou
pulmonar). Esta estrutura permite a conexão e a avaliação física de dispositivos de
assistência ventricular (DAV) (Fonseca, et al., 2011).
Figura 1 – Diagrama de blocos do sistema híbrido
A proposta adotada na construção deste modelo foi fundamentada na flexibilidade
para troca de parâmetros do sistema cardiovascular, de modo que os compartimentos
facilmente possam ser intercambiados, em outras palavras, o compartimento 1 tanto pode
ser o coração direito quanto o esquerdo, bastando apenas a correta parametrização das
variáveis (Fonseca J, 2013). O programa desenvolvido em LabVIEW® desempenha as
funções de: cálculo de parâmetros e ajuste da velocidade do motor.
Para realizar o controle da velocidade em um motor brushless é necessário vincular tensão
aplicada em cada uma das bobinas com a velocidade do motor (Poonsawat &
Kulworawanichpong, 2008). A função transferencia de motores de corrente contínua podem
ser aproximadas a funções de primeira ordem ou funções de segunda sobreamortecido. O
método da caixa cinza pode ser aplicado em situações onde são conhecidas algumas
41
9º Congresso Latino-Americano de Orgãos Artificiais e Biomateriais
13º Congresso da Sociedade Latino Americana de Biomateriais, Orgãos Artificiais e Engenharia de Tecidos - SLABO
24 a 27 de Agosto de 2016, Foz do Iguaçu, PR
caracteristicas do sistema e é preciso realizar a parametrização dos elementos envolvidos.
A abordagem utilizada será o levantamento das características de um sistema de segunda
ordem através da análise do gráfico gerado através do estimulo de uma entrada degrau.
(Aguirre, 2015)
A variação de velocidade é feita através do controle da tensão média oscilante
defasada em 180° entre si e modulada em pwm que permite usar o range de comando do
sinal em um valor percentual variando de 0 a 1(Baratieri, 2011).
O objetivo do trabalho é aplicar um sistema de controle para velocidade de rotação
em um motor brushless utilizando a plataforma de programação em FPGA.
MATERIAL E MÉTODOS
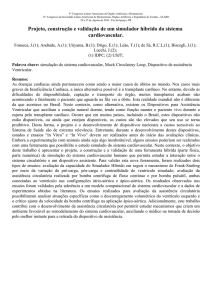
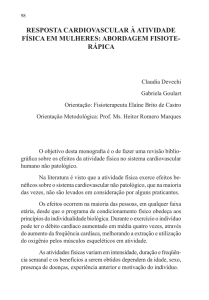
Além da seção numérica, o simulador híbrido também é formado por uma seção
física, onde é possível conectar o dispositivo de assistência ventricular em desenvolvimento.
A Figura 2 apresenta uma foto da seção física do simulador (Fonseca, 2013).
1
2
3
4
Figura 2 – [1] Pontos de conexão de LVAD Câmara de bombeamento (Ventrículo esquerdo),
[2] Resistencia vascular sistêmica, [3] Tomada da pressão do átrio esquerdo e [4] Câmara
de bombeamento.
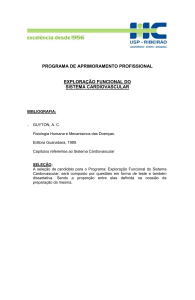
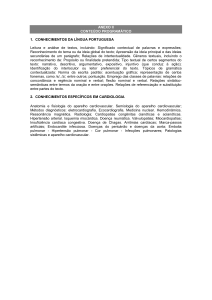
Os componentes que formam esta seção podem ser divididos em atuadores e
sensores. Entre os atuadores acionados pelo computador, estão: o sistema eletromecânico
de propulsão, responsável pela contração do ventrículo esquerdo conforme Figura 3; ajuste
do volume de ar contido na câmara de complacência; ajuste da resistência vascular
sistêmica, e; acionamento das válvulas para enchimento e esvaziamento do reservatório
(átrio). Fazem parte do conjunto de sensores: sensores de pressão (entrada do ventrículo,
42
9º Congresso Latino-Americano de Orgãos Artificiais e Biomateriais
13º Congresso da Sociedade Latino Americana de Biomateriais, Orgãos Artificiais e Engenharia de Tecidos - SLABO
24 a 27 de Agosto de 2016, Foz do Iguaçu, PR
intraventricular e aórtica); sensor de vazão e; sensor de deslocamento do diafragma
(utilizado para obter o volume contido na câmara ventricular).
Figura 3 - Esquema de montagem do atuador (FONSECA, 2013)
Todos os materiais que serão necessários no desenvolvimento deste projeto de
pesquisa se encontram disponíveis no Centro de Engenharia em Assistência Circulatória
(CEAC) no Instituto Dante Pazzanese de Cardiologia (IDPC):
• Plataforma NI Compact RIO c9035 com módulos para aquisição e controle de dados;
• Software LabVIEW RT 2015;
• Sensores de Pressão;
• Fluxômetro;
• Motor Brushless DC;
• Aparato físico para simulação.
Para realizar o comando do motor brushless é determinada a função te transferência
que vincula as variáveis medidas com as variáveis controladas. Para isso é feito o
levantamento das formas disponíveis para controle. A característica fundamental no
processo é a velocidade de deslocamento do embolo que movimenta o fluxo de liquido no
simulador, característica essa que está diretamente vinculada com a velocidade angular do
rotor do motor medida utilizando-se três sensores hall acoplados as bobinas do estator do
motor.
RESULTADOS E DISCUSSÃO
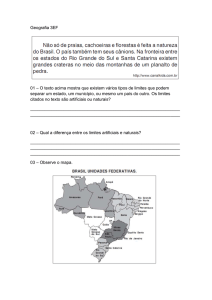
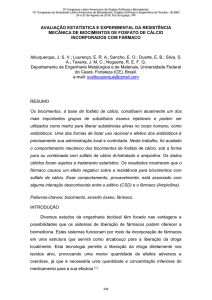
Foi realizado o levantamento o valor da velocidade medida através de sensores hall
proximos às bobinas do motor e dos sinais que vinculam a porcentagem do sinal pwm
representados na Figura 4, caracterizada pelo estimulo sequenciado de entradas degrau
que são acrescidas a cada 3 ou mais ciclos.
43
9º Congresso Latino-Americano de Orgãos Artificiais e Biomateriais
13º Congresso da Sociedade Latino Americana de Biomateriais, Orgãos Artificiais e Engenharia de Tecidos - SLABO
24 a 27 de Agosto de 2016, Foz do Iguaçu, PR
Figura 4 - Sinais de funcionamento do motor
Figura 5 - Sistema identificado.
Foi possível então realizar através da análise gráfica o levantamento da função
transferência e implementar um controle PID para que o tempo de acomodação e o erro
44
9º Congresso Latino-Americano de Orgãos Artificiais e Biomateriais
13º Congresso da Sociedade Latino Americana de Biomateriais, Orgãos Artificiais e Engenharia de Tecidos - SLABO
24 a 27 de Agosto de 2016, Foz do Iguaçu, PR
estacionário fossem de 0,06s e 5%, respectivamente, considerados adequadas para a
aplicação. A operação do SHSC foi satisfatória para reproduzir as condições do sistema
cardiovascular, inclusive em condições de insuficiência cardíaca que exigem um ciclo
maximo de 150 batimentos por minuto sendo dele 30% executado na sistole.
(A)
Tabela 1 - Comparativo entre o sistema controlado e a planta
Sistema controlado
Sistema Identificado
Parâmetros PID
Tempo de subida: 0.0351
Tempo de subida: 1.1316
Kp: 5.84 e+03
Tempo de acomodação: 0.0599 Tempo de acomodação: 3.7717
Ki: 3.14e+03
Pico: 1.0033
Pico: 0.0106
Kd: 2.71e+03
Tempo de Pico: 0.1124
Tempo de Pico: 2.4558
Figura 6 - Sistema controlado
CONCLUSÕES
Seguindo a estrutura determinada pela bibliografia foi possível executar o controle do
motor brushless de maneira satisfatória dentro da faixa de operação do simulador. Onde a
função transferência obtida através do método de caixa cinza representou adequadamente o
comportamento do motor e permitiu o ajuste dos parâmetros do PID.
AGRADECIMENTOS
45
9º Congresso Latino-Americano de Orgãos Artificiais e Biomateriais
13º Congresso da Sociedade Latino Americana de Biomateriais, Orgãos Artificiais e Engenharia de Tecidos - SLABO
24 a 27 de Agosto de 2016, Foz do Iguaçu, PR
Agradecimento especial ao Instituto Federal de Educação, Ciência e Tecnologia, ao
Instituto Dante Pazzanese de Cardiologia e a Fundação de Amparo à Pesquisa do Estado
de São Paulo por auxiliar na execução desse projeto.
REFERÊNCIAS
Aguirre, L. A. (2015). Introdução à identificação de sistemas -Técnicas lineares e não
lineares aplicadas a sistemas: Teoria e Aplicação (4ª ed.). Belo Horizonte: FMG.
Baratieri, C. L. (2011). CONTROLE DE VELOCIDADE SENSORLESS DE
MOTORES BRUSHLESS DC SUBMETIDOS A VARIAÇOES PERIÓDICAS DE CARGA.
Santa Maria, RS, Brasil: Universidade Federal de Santa Maria.
Dinkhuysen, J. (2002). Porque o número de transplantes cardíacos não tem crescido
no Brasil? São Paulo: ABTO. Fonte: ABTO - Associação Brasileira de Transplantes de
Órgãos.
Fonseca, J. (2013). Projeto, Construção e Validação de um Simulador Híbrido do
Sistema Cardiovascular. Tese de Doutorado. São José dos Campos: Instituto Tecnológico
de Aeronáutica.
Fonseca, J. (2013). Projeto, Construção e Validação de um Simulador Híbrido do
Sistema Cardiovascular. São José dos Campos: Instituto Tecnológico de Aeronáutica.
Fonseca, J., Andrade, A., Nicolosi, D., Biscegli, J., Leme, J., Legendre, D., . . .
Lucchi, J. (2011). Cardiovascular Simulator Improvement: Pressure Versus Volume Loop
Assessment. Artificial Organs, 35(5), pp. 454 - 8.
Kirklin, J., & Naftel, D. (2008). Mechanical Circulatory Support: Registering a Therapy
in Evolution. Circulation: Heart Failure, 1(200 - 205).
Marinho, A. (2004). Um estudo sobre as filas para internações e para transplantes no
sistema único de saúde brasileiro. Rio de Janeiro: IPEA.
Nosé, Y., Nakata, K., Yoshikawa, M., Letsou, G., Fujisawaa, A., Wolner, E., &
Schima, H. (1999). Development of a totally implantable biventricular bypass centrifugal
blood pump system. Ann Thorac Surg, 68(775-779).
Poonsawat, S., & Kulworawanichpong, T. (2008). Speed Regulation of a Small BLDC
Motor using Genetic-Based Proportional Control. World Academy of Science, Engineering
and Technology, pp. 232-237.
Timms, D., & et al. (2005). A complete mock circulation loop for the evaluation of left,
right, and biventricular assist devices. Artif Organs, v.29.
YU, Y., & Gopalakrishnan, S. (2009). Elastance Control of a Mock Circulatory System
for Ventricular Assist Deveice Test. American Control Conference.
46
9º Congresso Latino-Americano de Orgãos Artificiais e Biomateriais
13º Congresso da Sociedade Latino Americana de Biomateriais, Orgãos Artificiais e Engenharia de Tecidos - SLABO
24 a 27 de Agosto de 2016, Foz do Iguaçu, PR
REAL TIME APPLICATION DEVELOPMENT FOR A BRUSHES MOTOR DRIVE OF
HYBRID SIMULATOR CARDIOVASCULAR SYSTEM
ABSTRACT: Develop motor control brushless (BLDC, brushless) that triggers the Hybrid
Simulator Cardiovascular (SHSC) real-time platform. The SHSC is a numerical and physical
tool (hybrid) type "hardware in-the-loop" fully parameterized high flexibility. It enables the
hydrodynamic study of the cardiovascular system in adverse conditions in order to increase
the efficiency of assistance provided at the same time reducing the impact of the natural
heart. The SHSC is composed of two sections: physical and numerical. The latter is
responsible for the implementation of the pulmonary circulation and control simulator. The
problem addressed in the work is the replacement of the simulator using dedicated hardware
to the engine control module BLDC at real-time speed control. The control of the
development methodology used classic technique of control, proportional-integral control.
The system transfer function is obtained experimentally. The implementation was performed
in Labview software program and compiled for the real-time platform. The settling time and
the error were 0,06s stationary and 5%, respectively, which are considered suitable for the
application. The operation was satisfactory SHSC to reproduce the conditions of the
cardiovascular system including heart failure conditions
KEYWORDS: Hardware in the loop , Automation heart simulator , Cardiovascular System
47