Identificação dos Parâmetros do Modelo Junção do Joelho Conjunto
Perna-Pé com Redes Neurais Artificiais
Rafael de Paula Camata , Erica Regina Marani Daruichi Machado, Campus de Ilha Solteira,
Engenharia Elétrica, [email protected], bolsa Fapesp.
Palavras Chave: Redes Neurais, Hopfield, Sistemas Biológicos, Estimulação Elétrica, Controle.
Introdução
A pesquisa tem como objetivo principal a
identificação paramétrica dos sistemas biológicos de
Modelo da Junção do Joelho Conjunto Perna-pé
propostos por Law e Shield (Law e Shield, 2006) e
por Ferrarim e Pedotti (Ferrarim e Pedotti, 2000)
utilizando o algoritmo dos mínimos quadrados e o
algoritmo de identificação com Rede Neural de
Hopfield (Hopfield, 1982). O sistema de identificação
utilizando a rede de Hopfield é um sistema de
identificação paramétrica, no qual os parâmetros
são estimados pela minimização de uma função
energia. O estado de mínimo da rede determina os
parâmetros do sistema. Através da eletro
Estimulação Neuro Muscular (EENM), alguns
pacientes que perderam as funções motoras, mas
que apresentam os nervos periféricos intactos tem
grandes chances de recuperar ou melhorar os
movimentos perdidos. Entretanto, os parâmetros do
modelo matemático que representa a dinâmica do
sistema Junção do Joelho Conjunto Perna-pé
variam de paciente para paciente e dependem das
condições físicas e emocionais de cada indivíduo no
momento da aplicação da estimulação elétrica.
Portanto, a identificação prévia dos parâmetros da
planta é importante, pois através deles se consegue
projetar e simular o conjunto controladorestimulador, evitando-se que os primeiros testes
reais de controle sejam aplicados em pacientes.
Material e Métodos
Os algoritmos de identificação paramétrica estão
sendo desenvolvidos para os modelos de Junção do
Joelho Conjunto Perna-pé propostos em (Law e
Shield, 2006) e (Ferrarim e Pedotti, 2000). O modelo
proposto em (Law e Shield, 2006) relaciona um trem
de pulsos na entrada com a força exercida pelo
músculo da coxa de um paciente paraplégico,
hemiplégico ou tetraplégico. A função de
transferência deste modelo pode ser representada
por um sistema de segunda ordem. O modelo
proposto em (Ferrarim e Pedotti, 2000) representa
um sistema do membro inferior com dois segmentos
rígidos, coxa e canela-pé e a função de
transferência é dada por um sistema de terceira
ordem. Serão implementados computacionalmente
os algoritmos de identificação dos mínimos
quadrados e o algoritmo de identificação com a
Rede de Hopfield proposto em (Machado, 2003) no
software Matlab. Em seguida serão realizadas
comparações entre os resultados obtidos com os
XXIV Congresso de Iniciação Científica
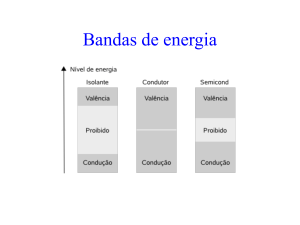
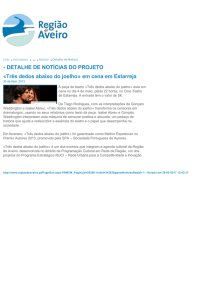
dois algoritmos. A Figura 1 apresenta o esquema do
sistema a ser estudado.
•l
•
•
•
•
é a distância entre o
joelho e o centro de
massa;
θ é o ângulo entre a
perna e a coxa;
Ma é o torque ativo;
m é a massa do conjunto;
g é a gravidade.
Figura 1. Modelo Mecânico da Junção do Joelho
com o conjunto perna-pé.
Resultados e Discussão
Foram realizados estudos de algoritmos de
identificação e redes neurais e atualmente a
pesquisa encontra-se na fase de desenvolvimento
dos algoritmos.
Conclusões
O estudo envolve temas não abordados na
graduação como identificação de sistemas e redes
neurais. Estes conceitos irão enriquecer a formação
do aluno na área de controle e os resultados obtidos
nessa pesquisa serão utilizados pelos grupos de
Instrumentação e Controle do Departamento de
Engenharia Elétrica (DEE) no desenvolvimento de
um sistema de eletro-estimulação funcional para
geração de movimentos nos membros inferiores de
pacientes
paraplégicos,
com
rotinas
de
acompanhamento do progresso do tratamento.
Agradecimentos
Agradecemos á FAPESP pelo apoio financeiro.
____________________
1
Hopfield, J.J. “Neural networks and physical systems with emergent
collective computation abilities”, Proc. Nat. Acad. Sci., 1982, 79,.
2554-2558.
2
Machado, E. R. M. D. Identificação Rápida de Sistemas Dinâmicos
Utilizando Redes Neurais de Hopfield e Mínimos Quadrados.
Dissertação de Mestrado em Engenharia Elétrica, FEIS/UNESP, Ilha
Solteira, 1998.
3
Law, L. A. F. e Shield, R. K., “Predicting Human Chronically
Paralyzed Muscle Force: a Comparison of Three Mathematical Models”,
Graduate Program in Physical Therapy and Rehabilitation Science, The
University of Iowa, Iowa City, Iowa. J Appl Physical, 2006, 100, 10271036.
4
Ferrarin, M. e Pedotti, A.,” The Relationship Between Electrical
Stimulus and Joint Torque: A Dynamic Model”, IEEE Trans. Rehabil.
Eng., 2000, 8(3), 342-352.