Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
CONTROLE BASEADO EM MICROCONTROLADOR PARA CONVERSOR CA/CC DE 12 PULSOS
DEILTON G. GOMES*, SEBASTIÃO E. M. DE OLIVEIRA**, RAFAEL J. F. DE SÁ*, LUIS C. G. LOPES*
*Coord. de Eletrotécnica/Controle e Automação, Centro Federal de Educação Tecnológica de Minas Gerais
Rua José Peres, 558, 36700-000, Leopoldina, MG, Brasil
E-mails:[email protected],[email protected],
[email protected]
** DEE / POLI e Programa de Engenharia Elétrica da COPPE / Universidade Federal do Rio de Janeiro
UFRJ - Centro de Tecnologia - Bloco H - Sala 236-A
Ilha do Fundão – Rio de Janeiro - RJ
E-mail:[email protected]
Abstract
This paper introduces the design of hardware and software of a microcontroller based low cost control circuit for
twelve pulses AC/DC three-phase converters. To easily understand the circuit, it has been divided into three blocks: zero crossing
detector block, the PIC block which has the software responsible for pulse generation and shifting followed by the isolation and
signal amplification block. First of all the control circuits are evaluated through MatLab/Simulink, showing operation results in
order to analyze control response. Finally, the laboratorial tests of the proposed digital control are presented and evaluated
through experimental results on the control of a 12 pulses AC/DC three-phase converter.
Keywords
AC-DC converter design, Digital Control, Microcontrollers and Measurement of Harmonic Distortion.
Resumo1
Este trabalho apresenta o projeto de hardware e software de um circuito de controle de baixo custo baseado em microcontrolador, para conversor trifásico CA/CC de 12 pulsos. Para facilidade do entendimento do circuito, este foi dividido em
três blocos, sendo eles: o bloco de sincronismo, o bloco do PIC dotado do software responsável pela geração e deslocamento dos
pulsos e o bloco de isolação e amplificação do sinal. Primeiramente são apresentados os resultados da simulação do circuito de
controle implementado computacionalmente utilizando o pacote SimPowerSystems para uso com o Matlab/Simulink e, posteriormente, são apresentados os resultados de medições elétricas realizadas nas montagens práticas desse circuito controlando um
conversor CA/CC de 12 pulsos .
Palavras-chave
Projeto de conversores CA-CC, Controle Digital, Microcontroladores, Medição de Distorções Harmônicas.
1
Introdução
As últimas décadas foram marcadas pelo crescente desenvolvimento tecnológico em que a eletrônica de potência teve destaque fundamental. Os métodos empregados em eletrônica de potência baseiam-se no chaveamento de dispositivos semicondutores de potência que comutam entre os estados ligado
e desligado, transferindo energia de forma controlada
de uma fonte de alimentação para uma carga (Bose,
1992; Mohan et alli, 1995; Barbi, 2006).
O alto desempenho no acionamento de máquinas
elétricas, de locomotivas e o bom funcionamento de
estações retificadoras para alimentação de redes de
transmissão CC, dependem largamente da tecnologia
de controle utilizada para os conversores de potência.
Um controle rápido e eficiente é realizado através de
métodos diferentes de chaveamento. Os conversores
de potência podem ser tipicamente controlados por
circuitos analógicos ou por circuitos digitais. Os circuitos analógicos são facilmente encontrados no mercado e têm como principais vantagens o seu baixo
custo e a facilidade de uso. Com a crescente utilização de circuitos digitais a necessidade de se obter
circuitos mistos que utilizam tanto a tecnologia analógica como a tecnologia digital vem se tornando cada
vez mais pertinente (Simard e Rajagopalan, 1975;
Mirbod e Ahmed, 1986; El-Bolok, H.M., 1990;
ISBN: 978-85-8001-069-5
Song, E.-H. e Kwon, B.-H., 1991; De Castro et alli,
1999).
Com o auxílio das ferramentas computacionais
modernas, a simulação e a validação de projetos que
utilizam eletrônica digital e analógica em conjunto
podem ser feitas de forma mais natural, num mesmo
ambiente de simulação e com uma chance maior de
êxito. Os circuitos digitais vêm diminuindo seu custo
em relação aos circuitos analógicos, bem como aperfeiçoando seu desempenho. Em virtude dessas condições, os controles de estruturas de potência vêm
migrando para a tecnologia digital que traz alguns
benefícios para o controle, tais como: 1) facilidade de
expansão, permitindo sua reconfiguração para implementação de mais funções, 2) melhoria no desempenho, de forma que algumas características podem ser
melhoradas devido à alta velocidade de processamento dos atuais dispositivos digitais, em especiais
àquelas que necessitam de rápida realimentação, 3)
objetivos múltiplos em sistemas mais complexos, de
forma que um mesmo circuito digital pode ser utilzado para realizar diversos processamentos (De Castro
et alli, 1999; Canesin et alli, 2010).
Diante do exposto, neste artigo será apresentado
o projeto de hardware e software de um circuito de
controle de baixo custo baseado em microcontrolador, a ser utilizado no controle de conversores
CA/CC de 12 pulsos. Serão apresentados resultados
de simulação computacional utilizando o pacote
2812
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
SimPowerSystems para uso com o Matlab/Simulink
e, posteriormente, os resultados experimentais medidos a partir da montagem prática desse circuito de
controle aplicado a um conversor CA/CC de 12 pulsos.
2 Descrição do Hardware
A figura 1 apresenta o diagrama de blocos do
sistema de controle proposto. Para a facilidade do
entendimento do circuito de controle, a seguir serão
detalhados os principais blocos, sendo eles: bloco de
sincronismo, bloco do PIC dotado do software responsável pela geração e deslocamento dos pulsos e o
bloco de isolação e amplificação do sinal.
2.2 Bloco do Microcontrolador
A geração e deslocamento dos pulsos foram
alcançados através do microcontrolador PIC18F452.
Um display tipo Liquid Crystal Display (LCD) foi
interfaceado ao microcontrolador. A escolha do controlador PIC18F452 deve-se, principalmente, a seu
baixo custo e a seus vários recursos que permitem
reconfiguração para implementação de mais funções.
A programação do circuito de controle foi realizada a
partir da utilização do pulse width modulation
(PWM) ou Modulação de Largura de Pulso. O PIC
utilizado contém 02 PWMs internos, o que conduz,
naturalmente, à utilização de 06 PICs para a implementação do projeto. Entretanto, este número de
componentes aumenta sobremaneira o custo de todo
o projeto. Por isso foi decidido programar o PWM
através de códigos, o que reduziu bastante os custos.
2.3 Bloco de Isolação e Amplificação do Sinal
Para proteção dos circuitos de comando, em
muitas aplicações é necessário à separação do circuito de comando do circuito de potência, pois o circuito de potência é submetido a tensões elevadas, enquanto o circuito de comando é alimentado a baixas
tensões. O acoplamento óptico possui como maior
vantagem à imunidade a interferências eletromagnéticas e a alta isolação de potência. No caso proposto,
a isolação dos pulsos foi realizada com o a utilização
do optoacoplador 4N25 e, em seguida, a amplificação dos pulsos foi realizada pelo transistor BD135. A
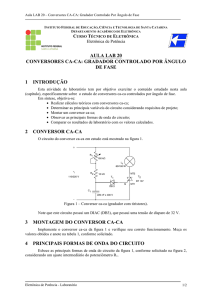
figura 3 apresenta o circuito de isolação e amplificação de sinal utilizado para cada tiristor.
Figura 1. Diagrama de blocos do circuito de controle.
2.1 Detector de Passagem pelo Zero (Bloco de Sincronismo)
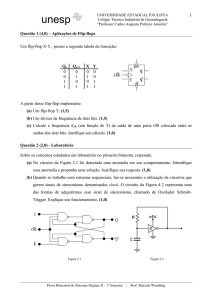
O bloco de sincronismo mostrado na figura 2 é
composto por um transformador abaixador de tensão,
dois resistores em série para divisão do potencial,
elétrico que alimenta um amplificador operacional
LM741, responsável pela detecção de passagem pelo
zero da tensão da rede. Ainda, são utilizados 01 diodo, 01 amplificador operacional LM741 e 02 resistores de 22kΩ e 10kΩ, permitido assim pulsos no semiciclo positivo que variam de 0 a 5 Volts. Este circuito
permite também o aumento da impedância de saída
deste bloco que, por sua vez, é conectado ao pino
RB0 do PIC.
Figura 3. Circuito de isolação e amplificação de sinal.
3 Descrição do Software
Um firmware utilizando a linguagem C foi elaborado conforme algoritmo representado no fluxograma da figura 4. Seguem o detalhamento das funções.
Figura 2 – Circuito detector de passagem pelo zero.
ISBN: 978-85-8001-069-5
2813
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
//disparo em delta
cntd1=0;
cntd2=0;
cntd3=240;
cntd4=240;
cntd5=120;
cntd6=120;
3.3 Função Interrupção do Timer (360 Vezes por
Ciclo)
1) Compara o valor do nível, sinal de referencia, com o valor do contador de cada disparo. Se o valor do nível for maior que o valor
do contador, ele retorna um trem de pulso
iniciando com o nível logico alto. Já se o valor for menor, ele retorna com nível logico
baixo.
Figura 4. Fluxograma que resume o algoritmo implementado.
3.1 FunçãoPrincipal
1) Inicializa o PORTA como entrada, TRISA =
0xFF.
2) Inicializa o PORTB como saída, com exceção do RB0 que é configurado como entrada, TRISA = 0x01.
3) Inicializa o PORTC como saída, TRISA =
0x00.
4) Inicializa o PORTD como saída, TRISA =
0x00.
5) Inicializa o PORTE como saída, TRISA =
0x00.
6) Configura o AN0 como entrada analógica.
7) Configura a interrupção para detectar a borda de subida.
8) Configura o timer da interrupção para ocorrer a cada 46,296 µs.
9) Habilita interrupções.
10) Inicializa display.
11) Lê o sinal de referencia através do RA0
(ADC).
12) Converte o valor de 0 a 5V (0 a 1024) para
um ângulo de 0 a 180.
13) Mostra valor do ângulo no display.
14) Retorna no item 11.
3.2 Função Interrupção da Passagem pelo Zero
(Início do Ciclo a Cada 16,66ms)
1) Executa a sincronização dos contadores inicializando seus valores de acordo com a saída de pulso.
//disparo em Y
cnt1=30;
cnt2=30;
cnt3=150;
cnt4=150;
cnt5=270;
cnt6=270;
ISBN: 978-85-8001-069-5
2) Incrementa o contador.
//disparo da saída 1
if((cnt1 < nivel) || (cnt1 >= 180))
saida1=0;
else
saida1^=1;
cnt1=cnt1+1;
4 Conversor Trifásico Controlado
A configuração para conversores de 12 pulsos é
formada por dois grupos de 6 pulsos alimentados por
dois transformadores trifásicos em paralelo do lado
CA, com suas tensões fundamentais iguais e defasadas por 30º. Além disso, para manter a operação de
12 pulsos, os 2 grupos de 6 pulsos devem trabalhar
com mesmo controle de ângulo e, portanto, as correntes na frequência fundamental nos primários dos
dois transformadores estarão em fase. Considerando
θ = wt , a corrente de linha total para conversores de
12 pulsos, quando o ângulo de comutação é desprezado, pode ser decomposta em:
F=
4 3
π
I d (cos θ −
1
cos11θ . +
11
1
1
. cos13θ − cos 23θ +
13
23
1
+ cos 25θ ....)
25
+
(1)
A série contém somente harmônicos de ordens
p.q ±1, onde p=12 é o número de pulsos) e q é um
número inteiro. A tabela 1 resume as características
dos retificadores de 12 pulsos (Mohan et alli, 1995).
2814
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
Tabela 1 - Características dos retificadores de 12 pulsos.
Assim, têm-se os 12 pulsos para o conversor
CA /CC. A defasagem entre os pulsos foi implementada através de códigos programados em C.
5 Simulação Computacional
5.1 Circuito de Controle
Na figura 5 tem-se o diagrama esquemático do
circuito de controle projetado e implementado no
Matlab/Simulink. Este circuito gera 12 pulsos a partir
de uma única tensão de referência.
Figura 7. Pulsos para o conversor ligado ao transformador Y-Y.
Figura 8. Pulsos para o conversor ligado ao transformador Y-∆.
5.2 Circuito de Controle e Conversor de 12 pulsos
Figura 5. Diagrama esquemático do circuito de controle baseado
em microcontrolador.
A figura 6 apresenta o sinal de saída do bloco de
sincronismo em relação à tensão de referência.
Já as figuras 7 e 8 apresentam, respectivamente,
os pulsos gerados para os conversores conectados aos
transformadores Y-Y e Y-∆.
A figura 9 apresenta os sistemas de controle e
conversor de 12 pulsos implementados no Matlab.
Observando da esquerda para direita, tem-se 02 transformadores trifásicos de 1,5 kVA, um ligado em Y-Y
e o outro em Y-∆, sendo este último responsável pela
defasagem de 30º da tensão que alimenta o conversor. Estes, por sua vez, estão conectados a 02 conversores tiristorizados de 6 pulsos, com seus respectivos circuitos snubbers. Os tiristores são comandados a partir do controle proposto neste trabalho. Finalmente, tem-se o reator de alisamento na saída do
conversor, conectado em série com a carga e antes
dela.
Figura 9. Sistema implementado no Matlab/Simulink.
Figura 6. Formas de ondas da tensão de entrada do bloco de sincronismo e sinal de saída deste bloco.
ISBN: 978-85-8001-069-5
Os resultados da simulação são apresentados na
figura 10.
2815
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
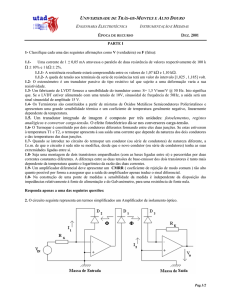
Figura 10. Formas de ondas das correntes no primário e secundário dos transformadores conectados aos conversores, para carga R=250 Ω,
considerando o ângulo de disparo α = 0º. Resultados de simulação computacional.
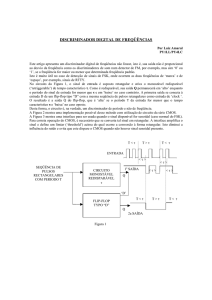
Já a figura 11 apresenta as formas de ondas da
tensão e corrente na carga R=250 Ω, considerando
o ângulo de disparo α=45º.
Figura 12. Forma de onda da corrente total de linha (do conversor de 12 pulsos).
Figura 11. Formas de ondas da tensão e corrente na carga R=250
Ω, considerando ângulo de disparo α=45º.
Para um ângulo de disparo α=45º, as figuras 12
e 13 apresentam respectivamente a forma de onda
da corrente total de linha (do conversor de 12 pulsos), e a magnitude do seu conteúdo harmônico
como porcentagem da magnitude da corrente fundamental. Assim, a distorção harmônica total
(THD) que relaciona a magnitude das componentes
harmônicas geradas a partir da magnitude da corrente fundamental resultou em um valor igual à
THD = 14,60 %.
ISBN: 978-85-8001-069-5
Figura 13. Amplitude do conteúdo harmônico como porcentagem da magnitude da corrente fundamental, medida no primário
dos transformadores, considerando a carga R=250 Ω, com
ângulo α=45º.
2816
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
6 Experimentos Práticos
Neste tópico são apresentados os principais resultados práticos do conversor de 12 pulsos controlado, a partir do circuito de controle baseado em
microcontrolador. A figura 15 apresenta o diagrama
esquemático da bancada de teste para o conjunto
controle/conversor.
Figura 16. Sistema de controle e conversor submetidos ao ensaio
experimental.
Figura 15. Diagrama esquemático da bancada de teste para o
conjunto controle/conversor.
A Figura 17 apresenta as formas de ondas das
correntes no primário e secundário dos transformadores conectados aos conversores, para carga
R=250 Ω, considerando o ângulo de disparo α=0º.
Uma foto do sistema de controle e conversor
submetidos ao ensaio experimental é apresentada
na figura 16.
Figura 17. Formas de ondas das correntes no primário e secundário dos transformadores conectados aos conversores, para carga R=250 Ω,
considerando o ângulo de disparo α=0º. Resultados dos experimentos práticos.
ISBN: 978-85-8001-069-5
2817
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
A figura 18 apresenta as formas de ondas da
tensão e corrente na carga R=250 Ω, considerando
o seguinte ângulo de disparo α=45º.
Os resultados experimentais para o exemplo de
aplicação aproximaram-se bastante com os resultados obtidos com as simulações computacionais e
também com resultados teóricos descritos em bibliografias referentes, tais como em (Mohan et alli,
1995; Barbi, 2006).
7 Conclusão
Figura 18. Formas de ondas da tensão e corrente na carga R=250
Ω, considerando ângulo de disparo α=45º.
Para um ângulo de disparo α=45º, as figuras 19
e 20 apresentam respectivamente a forma de onda
da corrente total de linha (do conversor de 12 pulsos), e a amplitude do seu conteúdo harmônico
como porcentagem da amplitude da corrente fundamental. A distorção harmônica total calculada
resultou em THD = 14,439 %.
Neste artigo foi apresentado um controle baseado
em microprocessador a ser utilizado com conversores CA/CC de 12 pulsos. Analisando o circuito de
controle desenvolvido tem-se como pontos positivos, o baixo número de componentes utilizados,
grande precisão que se consegue com esse componente e a possível visualização do ângulo de disparo através de um display LCD. Outro ponto importante deste programa foi a possível geração dos 12
pulsos com a correta defasagem com apenas uma
entrada de tensão de referencia. Finalmente, os
resultados experimentais obtidos, tais como medidas de tensão, correntes e conteúdos harmônicos,
para o exemplo de aplicação, com controle desenvolvido aproximaram-se bastante dos resultados
obtidos com as simulações computacionais, bem
como resultados teóricos descritos em bibliografias
referentes.
Agradecimentos
Agradecemos o suporte financeiro da
FAPEMIG (Fundação de Amparo à Pesquisa do
estado de Minas Gerais) no desenvolvimento desta
pesquisa e ao CEFET-MG.
Referências Bibliográficas
Figura 19. Forma de onda da corrente total de linha (do conversor de 12 pulsos), considerando a carga R=250 Ω, com ângulo
α=45º.
Figura 20. Amplitude do conteúdo harmônico como porcentagem da magnitude da corrente fundamental, medida no primário
dos transformadores, considerando a carga R=250 Ω, com
ângulo α=45º.
ISBN: 978-85-8001-069-5
Barbi, I., 2006, “Eletrônica de Potência”. 6. ed.
Florianópolis: Edição do Autor.
Bose, B.K., 1992, "Recent Advances In Power
Electronics", IEEE Transactions on Power
Electronics, vol 7, no. 1: 2-10.
Canesin, C. A. ; Sampaio, L. P.; Gonçalves, F. A.
S..(2010), “Ensino e Orientação para projeto
de conversores CC-CC através de aplicativos
em Java”. Controle & Automação (Impresso),
v. 21, pp. 272-282.
Canesin, C. A.; Gonçalves, F. A. S. e Sampaio, L.
P.,.(2010). “Simulation Tools for Power
Electronics
Courses
Based
in
Java
Technologies”.
IEEE
Transactions
on
Education, v. 53, pp. 580-586.
De Castro, A.; Zumel, P.; García, O.; Riesgo, T.
and Uceda, J., Fevereiro 1999, “Concurrent
and Simple Digital Controller of an AC/DC
Converter with Power Factor Correction”.
IEEE Trans. Ind. Electron., vol. 46, pp. 3-12.
Donoso-Garcia, P. F.; Cortizo, P. C. e Morais L. M.
F. (2008).”Ensino orientado ao projeto: uma
experiência para o ensino de eletrônica nas
2818
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
disciplinas de laboratório de eletrônica e
eletrônica de potência”, Eletrônica de Potência,
vol. 13, no. 2, pp. 109-116.
El-Bolok, H.M., 1990, “A Microprocessor-Based
Firing Circuit For Thyristors Working Under A
Three-Phase Variable-Frequency Supply”,
IEEE Transactions on Industrial Electronics,
vol.37, pp. 152-155.
Farooq, U.; Hasan, K.M.; ul Hasan, M.; Asad,
M.U.; Iqbal, A. and Akhtar, M.K., (2010).
“Microcontroller Based Low Cost Controlled
Training Module for Power Electronics
Laboratory”. IEEE International Conference
on Signal Acquisition and Processing, pp: 220
- 223.
Faruque, M. O.; Zhang, Y. and Dinavahi, V,
(2006). “Detailed Modelling of Cigre Hvdc
Benchmark System Using PSCAD/ EMTDC
and PSB/SIMULINK”, IEEE Trans. on Power
Delivery vol 21 no. 1, 378-387.
Garcia, F. S.; Ferreira, A. A. e Pomilio, J. A.
(2008). “Plataforma de ensino de eletrônica de
potência versátil e de baixo custo”, Eletrônica
de Potência, vol. 13, no. 2, pp.85-90.
Mirbod, Ali and El-Amawy, Ahmed, (1986), “A
General-Purpose
Microprocessor-Based
Control”, IEEE Transactions on Industrial
Electronics, vol.33, pp: 310 - 317.
Mohan, N.; Undeland, T. M. and Robbins, W. P.
(1995). Power Electronics: Converters,
Applications and Design. 3 Ed. New York:
John Wiley & Sons, Inc.
Sheng, L. W.; Razani, A. and Prabhakaran, N.
(2010). “Control of High Voltage Direct
Current (HVDC)
Bridges for Power
Transmission Systems”.
IEEE Student
Conference on Research and Development
(SCOReD).
Simard, R. and Rajagopalan, V., agosto 1975,
“Economical Equidistant Pulse Firing Scheme
for Thyristorized DC Drives” ”, IEEE
Transactions on Industrial Electronics, vol.ieci22, pp. 425-429.
Song, E.-H. e Kwon, B.-H.., 1991, “A Direct
Digital Control for the Phase-Controlled
Rectifier”, IEEE Transactions on Industrial
Electronics, vol.38, pp. 337-343.
ISBN: 978-85-8001-069-5
2819