Capítulo 4 – Memória
Prof. Romis Attux
EA075 – 2015
Obs: Os slides são parcialmente baseados nos dos autores do livro texto e do Prof. Levy Boccato
Partes e Ponderações
Um sistema embarcado possui três grandes categorias
de funcionalidades: processamento, armazenagem e
comunicação.
“Processamento” abrange a atuação no sentido de
modificar dados.
“Armazenagem” corresponde à tarefa de guardar dados
para uso posterior.
“Comunicação” diz respeito à transferência de dados.
Trataremos neste capítulo do problema de
armazenagem, partindo de conceitos de memória.
Aspectos Básicos
Uma memória é capaz de armazenar
uma grande quantidade de bits.
Basicamente, pode-se pensar em m
palavras com n bits cada, num total de
m*n bits, como mostrado abaixo.
Aspectos Básicos
Uma memória desse tipo, “m por n”,
pode ser vista na próxima figura em
mais detalhe. Note que essa memória
precisa de log2(m) bits para
especificar o endereço de uma
palavra e terá n bits para entrada e
saída de dados.
Por exemplo, uma memória 4096 por
8 precisará de 12 bits de
endereçamento e 8 bits de dados.
Aspectos Básicos
Leitura e Escrita
Ler a memória significa acessar o conteúdo de dados
associado a determinado endereço (acessar os dados
contidos numa palavra).
Escrever corresponde à operação de inserir dados no
endereço correspondente a uma palavra.
Um acesso à memória pode ser tanto para escrita
quanto para leitura.
Uma memória que pode ser lida e escrita requer um
sinal de controle, r/w, que indica a operação desejada.
Também é usual que haja um sinal de enable.
Tipos de Memória
Classicamente, divide-se a memória em dois tipos
fundamentais: ROM e RAM.
Uma memória ROM (read-only memory) é,
historicamente, uma memória que o processador
apenas lê, e que é não-volátil (guarda informação sem
estar ligada a uma fonte de energia).
Uma memória RAM (random-acess memory) é,
historicamente, vista como uma memória em que o
processador pode ler e escrever com certa agilidade,
mas que perde seu conteúdo se não alimentada.
Hibridização
Atualmente, esses conceitos não são
mais tão cristalizados. É possível
escrever em memórias ROM via
processador (EEPROM, memória
Flash) e existem RAMs não-voláteis.
Discutiremos então os tipos de
memória
em
termos
de
sua
capacidade
de
escrita
e
da
permanência
do
conteúdo
armazenado.
Possibilidade de Escrita
Todas as memórias podem ser lidas e escritas.
Discutiremos aqui os diferentes tipos de escrita em
memórias, que definem conceitos fundamentais.
Num extremo, temos as memórias em que o
processador escreve com toda agilidade simplesmente
especificando endereço, dados e sinais de controle.
Num meio-termo, temos memórias que podem sofrer
escrita pelo processador, mas num ritmo mais lento.
Por fim, temos memórias que só podem ser escritas
por um aparato especial denominado “programador”.
Retenção dos Dados
Por outro lado, temos a questão da duração dos dados
armazenados. No nível mais baixo nesse quesito estão
as memórias que começam a ter sua informação
perdida quase imediatamente após o processo de
escrita (e precisam de “refreshes” constantes). Em
seguida há memórias que perdem seu conteúdo assim
que deixam de ser alimentadas. Depois há memórias
que podem manter seu conteúdo por dias, meses ou
anos após o desligamento de sua fonte de alimentação.
Por fim, existem memórias que virtualmente nunca
perdem seu conteúdo (exceto em caso de dano ao
chip).
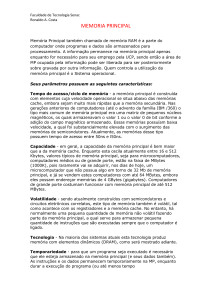
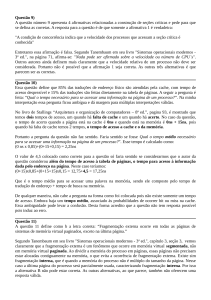
Categorias
Volátil / Não-Volátil
Programável no sistema / Nãoprogramável no sistema.
Esses conceitos terminam por
estabelecer um compromisso (tradeoff).
permanence
Storage
Categorias
Mask-programmed ROM
OTP ROM
Life of
product
EPROM
Tens of
years
Battery
life (10
years)
Ideal memory
EEPROM
FLASH
NVRAM
Nonvolatile
In-system
programmable
SRAM/DRAM
Near
zero
Write
ability
During
fabrication
only
External
programmer,
one time only
External
programmer,
1,000s
of cycles
External
programmer
OR in-system,
1,000s
of cycles
External
programmer
OR in-system,
block-oriented
writes, 1,000s
of cycles
Write ability and storage permanence of memories,
showing relative degrees along each axis (not to scale).
In-system, fast
writes,
unlimited
cycles
Memória ROM - Fundamentos
Uma ROM tradicional é uma memória
não-volátil que pode ser lida por um
processador, mas não sofre escrita
por ele. A escrita nela é feita por
meios externos de programação.
Portanto, uma ROM é programada
antes de ser usada num sistema
embarcado, e, depois, seu conteúdo
não é mais modificado.
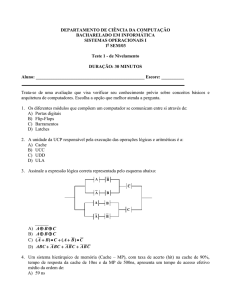
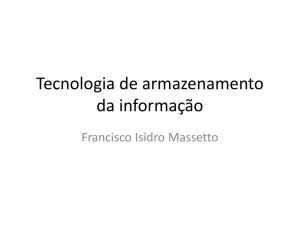
A figura a seguir a seguir mostra o
diagrama de uma memória ROM.
Memória ROM
External view
2k × n ROM
enable
A0
…
Ak-1
…
Qn-1
Q0
Algumas Funções Possíveis
Guardar o programa de um sistema
de propósito geral.
Guardar dados relevantes para o
sistema embarcado (lookup tables,
por exemplo).
Implementar circuitos combinacionais,
caso em que a ROM guarda, em
essência, a tabela-verdade do circuito.
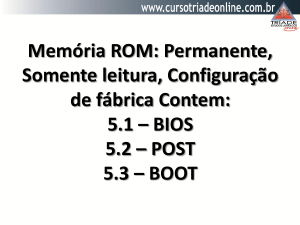
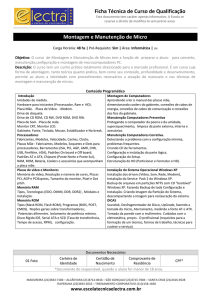
ROM – Esquema Básico
Internal view
8 × 4 ROM
word 0
enable
3×8 decoder
word 1
word 2
A0
word line
A1
A2
data line
programmable connection
wired-OR
Q3
Q2 Q1
Q0
ROM – Esquema Básico
Nesta memória, o conteúdo é
programado fisicamente pela
presença e ausência de conexões.
Por exemplo, se o enable estiver
habilitado e pedirmos a palavra de
endereço 010, teremos como resposta
o dado 1010, devido às conexões ou
ausência delas.
Perceba que o decodificador ativa a
linha da palavra desejada e as
ligações formam a informação.
Programação
Como programas as conexões? Há
várias formas de fazer isso, o que define
diferentes tipos de memórias ROM.
Em ordem de crescente simplicidade de
escrita, falaremos sobre maskprogrammed ROM, one-time
programmable ROM, erasable
programmable ROM (EPROM),
electrically erasable programmable ROM
(EEPROM) e memória Flash. As duas
últimas talvez nem devessem ser
chamadas de ROM...
Mask-Programmed ROM
Nesse caso, as conexões são
definidas na fabricação do chip por
meio de máscaras adequadamente
projetadas.
Não há a possibilidade de reescrita, e
o conteúdo só é perdido se houver
dano ao circuito.
OTP ROM
Trata-se de uma ROM programada pelo usuário uma única vez
(OTP – one-time programmable).
Para programar uma PROM, o usuário fornece um arquivo que
indica o padrão de conexões desejado. Um equipamento
denominado “programmer” então queima diversos fusíveis do
circuito removendo as conexões que não devem existir. É por isso
que essa PROM só pode ser usada uma vez.
Esse tipo de memória não sofre modificações após a escrita (exceto
se mais fusíveis forem queimados ou houver dano), sendo de
robustez atraente para produtos finais. Veremos que outras PROMs
podem sofrer modificações acidentais com maior probabilidade.
EPROM – Erasable
Programmable ROM
EPROMs são memórias que podem ser escritas e apagadas.
Elas usam transistores MOS como elementos de
armazenagem, numa configuração de gate flutuante. O
programmer injeta elétrons nesse gate usando tensões
relativamente altas (12 a 25 V), fazendo com que os elétrons
tunelem pelo isolante, como mostrado na figura a seguir.
Quando se retira a tensão, os elétrons ficam presos no gate,
e houve a programação de um bit “0”.
Ler uma EPROM é muito mais rápido que escrever nela, já
que não é preciso realizar a programação.
EPROM – Erasable
Programmable ROM
EPROM – Erasable
Programmable ROM
Para apagar a memória, usa-se a
incidência de luz ultravioleta sobre o
chip por 5 a 30 minutos, após o que o
chip pode ser reprogramado.
Para que a luz UV chegue ao chip, o
encapsulamento contém uma janela
de quartzo (windowed device).
EPROMs padrão guardam seu
conteúdo por pelo menos 10 anos.
EPROM – Erasable
Programmable ROM
Comparação
Em comparação com a OTP-ROM,
uma EPROM possui menor tempo de
armazenagem garantida (10 anos) e
há risco de que o conteúdo seja
corrompido em ambientes com muito
ruído elétrico ou radiação. No produto
final, é recomendável cobrir as janelas
dos chips para diminuir a chance de
mudanças espúrias.
EEPROM
Uma EEPROM é uma electrically erasable PROM, ou seja, uma
PROM apagável eletricamente.
Portanto, não só a programação é feita de maneira elétrica, mas
também o apagamento e programação.
Portanto, trata-se de uma memória que pode sofrer tanto leitura
quanto escrita (a escrita segue um ciclo de apagamento e escrita).
EEPROMs tipicamente são munidas de um controlador de memória
que provê uma interface simples ao usuário. Nesse caso,
praticamente diluem-se as fronteiras entre ROM e RAM, embora a
escrita numa EEPROM seja um processo mais custoso que a
leitura.
Memória Flash
A memória flash também é baseada
no princípio de gate flutuante, mas
permite de maneira orgânica o
apagamento de blocos de palavras.
Isso é interessante, pois agiliza a
operação do sistema de memória
quando se lida com grandes
quantidades de dados.
Memória RAM - Fundamentos
Memórias RAM (random-access
memory) são memórias que pode ser
lidas e escritas com facilidade.
Escrever numa RAM envolve um
custo parecido com o de uma leitura,
em contraste com o que ocorre com
as ROM programáveis, nas quais a
escrita é bem mais custosa que a
leitura.
Tipicamente, RAMs são memórias
voláteis.
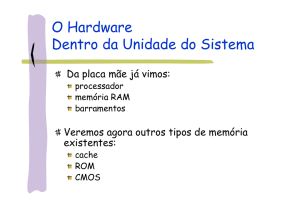
Memória RAM – Exemplo
Simples
A seguir apresentamos o diagrama de uma memória RAM simples.
Note a presença de um sinal r/w e do fluxo bidirecional de dados.
external view
r/w
2k × n read and write
memory
enable
A0
…
Ak-1
…
Qn-1
Q0
Memória RAM - Estrutura
O nome “acesso aleatório” vem em
contraste com memórias de acesso
sequencial, como fitas magnéticas,
por exemplo.
Há dois tipos básicos de RAM –
SRAM (static RAM) e DRAM (dynamic
RAM). Na primeira, a informação é
gravada numa estrutura equivalente à
de um flip-flop, e, na segunda, a
unidade de gravação básica é um
capacitor.
SRAM – Estrutura de
Armazenagem
Uma SRAM utiliza uma estrutura de flip-flop para armazenar
a informação. A estrutura retém a informação enquanto é
alimentada, em contraste com o que ocorre com uma DRAM.
Utiliza-se tipicamente SRAM em partes da memória que
requerem alto desempenho (e.g. cache).
SRAM
Data'
Data
W
DRAM – Estrutura de
Armazenagem
Uma DRAM utiliza uma estrutura contendo um
transistor MOS e um capacitor para guardar a
informação.
Cada bit, portanto, requer apenas um transistor, mas
isso ao custo de que a informação armazenada no
capacitor tende gradualmente a se perder (pelo
processo de descarga). Assim, cada célula precisa
sofrer periodicamente um processo de refresh.
DRAM
Data
W
DRAM – Estrutura de
Armazenagem
A taxa de refresh mínima de uma
memória DRAM típica é de cerca de
15 microssegundos.
Pela forma como DRAMs são
projetadas, a leitura de uma célula já
ocasiona seu refresh.
DRAMs tendem a ser mais lentas que
SRAMs.
NVRAM – RAM Não-Volátil
Uma NVRAM é uma memória RAM nãovolátil, ou seja, que é capaz de guardar seu
conteúdo mesmo sob uma perda de
alimentação.
Uma possibilidade é ter, por exemplo, uma
SRAM com uma bateria dedicada (algumas
baterias podem durar até 10 anos).
Outra é ter uma SRAM acoplada a uma
EEPROM ou flash espelho que guarda de
maneira perene o conteúdo da memória e
restaura esse conteúdo em caso de perda.
Exemplos – HM6264 (RAM) e
27C256 (ROM) – 8 bits
Composição de Memórias
O projetista de um sistema
embarcado pode se deparar com a
necessidade de utilizar certa
configuração de memórias tendo
apenas componentes de tamanho
diferente.
Por exemplo, ele pode precisar de
2k x 8 ROMs, mas ter apenas 4k x 16
ROMs. Por outro lado, ele pode se ver
na situação contrária.
Composição de Memórias
Quando a memória disponível é maior que o
necessário, o projetista pode usar apenas as
linhas menos significativas de endereços e
dados e ignorar as demais.
O caso em que a memória disponível é
menor que o necessário requer mais esforço.
Suponhamos, primeiramente, o caso em que
as memórias tem o número certo de
palavras, mas as palavras têm tamanho
insuficiente. Nesse caso, os chips podem ser
concatenados como a seguir.
Composição de Memórias
Composição de Memórias
Por outro lado, suponhamos que as
memórias tenham o tamanho de palavra
correto, mas número insuficiente de palavras.
Neste caso, criam-se linhas adicionais de
endereço e utilizam-se decodificadores.
Por exemplo, suponhamos que precisemos
de uma ROM com o dobro de palavras das
presentes nos chips de que dispomos. É
possível operar como mostrado a seguir
(criando uma linha de endereço adicional que
seleciona o chip).
Composição de Memórias
Composição de Memórias
Se fosse preciso quadruplicar (em vez
de dobrar) o tamanho da memória,
poder-se-ia usar um decodificador 2 x 4
e criar duas linhas de endereço
adicionais.
Se tivermos uma combinação dos dois
casos (palavras pequenas e poucas
palavras), podemos combinar as duas
técnicas. Faz-se a concatenação e, em
seguida, aplica-se o método de inclusão
de decodificadores. Um esboço é
mostrado a seguir.
Composição de Memórias
Hierarquia de Memória
Quando se projeta um sistema de
memória, vive-se um dilema: desejase memória rápida e barata.
No entanto, memória rápida tende a
ser cara e memória barata tende a ser
lenta.
Um caminho para se atingir um
compromisso é criar uma hierarquia
de memória, como ilustrado a seguir.
Hierarquia de Memória
Hierarquia de Memória
Do ponto de vista de sistemas embarcados, utiliza-se
uma memória maior e mais lenta (Main Memory) para
guardar o programa e os dados.
Utiliza-se também uma memória menor e mais rápida
(Cache), que é mais cara, para guardar blocos
acessados na memória principal. Por uma questão de
localidade, é provável que esses blocos sofram
diversos usos antes de serem trocados.
Embora o diagrama mostre apenas uma memória
cache, pode-se construí-la usando, eventualmente,
vários níveis.
Hierarquia de Memória
Alguns sistemas envolvem outras
formas de memória, como discos
magnéticos e fitas, mas, em sistemas
embarcados, isso não é comum.
Normalmente, projeta-se memória
cache com tecnologia SRAM, por sua
velocidade, o que explica por que a
memória cache é mais cara e menor
que a memória principal (por exemplo,
uma DRAM). Também explica-se seu
tamanho pelo fato de ela estar no
mesmo chip do processador em geral.
Memória Cache
Tipicamente, uma memória cache opera da
seguinte forma: quando se deseja acessar
um endereço de memória, verifica-se
primeiro se há uma cópia na cache.
Se houver, tem-se um acerto (cache hit), e o
acesso é rápido. Se não for o caso, tem-se
uma falha (cache miss), e tipicamente se
transporta o endereço e alguns vizinhos para
a cache.
Essa descrição levanta muita possibilidades,
que buscaremos discutir a seguir.
Mapeamento Direto
A figura a seguir ilustra o esquema. Note que o endereço
possui dois campos, index e tag. Index corresponde ao
endereço no espaço da cache, e, portanto, seu número de
bits é log2(tamanho_cache). O tamanho aqui quer dizer
número de linhas, como veremos adiante.
Perceba que vários endereços da memória principal
apontarão para o mesmo endereço na cache. Por esse
motivo, armazena-se na cache, juntamente com o conteúdo
da memória, a tag. Se os endereços de index batem, verificase se há coincidência de tags e verifica-se um bit de validade
(V), que revela se o dado corresponde a uma informação
válida trazida da memória principal.
Mapeamento Direto
Mapeamento Direto
Por fim, usa-se o campo offset para
buscar, numa linha da cache, a
palavra específica.
Uma linha da cache (ou bloco) é um
número de endereços adjacentes
inseparáveis trazidos da memória
principal para a cache. Tamanhos
típicos vão de 4 a 8 endereços.
Mapeamento Totalmente
Associativo
Neste caso, cada endereço de cache contém
não só o conteúdo da memória, mas o
endereço completo.
Para verificar se determinado conteúdo está
na cache, realiza a comparação da tag do
endereço com todas as tags armazenadas.
Em caso de cache hit, utiliza-se o offset para
buscar, dentro do bloco, a palavra desejada.
Note que o número de linhas da cache não é
determinado pelo formato do endereço.
Mapeamento Totalmente
Associativo
Mapeamento Associativo por
Conjuntos
Nesse caso, busca-se um compromisso entre os
dois paradigmas vistos anteriormente.
Como no mapeamento direto, o campo index
mapeia cada endereço de memória num único
campo da cache, mas agora esse campo contém
os tags de um ou mais blocos de palavras
(formando um conjunto). Para resolver essa
ambiguidade, faz-se, para esses blocos, uma
comparação simultânea (associativa) das tags.
Uma cache com conjuntos de N blocos é
chamada de N-way set-associative cache (N = 2,
4, 8 são opções comuns).
Mapeamento Associativo por
Conjuntos (2-way)
Mapeamento Associativo por
Conjuntos – Uma Ilustração
Comparações
O mapeamento direto é relativamente simples de
implementar, mas pode levar a várias
ocorrências de cache miss se duas ou mais
linhas com o mesmo index são acessadas
frequentemente, pois elas se expulsarão
mutuamente da cache.
Por outro lado, caches puramente associativas
são eficientes, mas requerem uma lógica de
comparação complexa.
Caches associativas por conjunto representam
um meio-termo entre ambos os casos.
Políticas de Substituição
A política de substituição de uma
cache é o método para decidir qual
linha substituir quando se usa um
método associativo ou associativo por
conjuntos. No caso direto, não há
escolha.
Uma primeira política é escolher
aleatoriamente o bloco. Embora seja
simples de implementar, a política
nada faz para aproveitar um bloco que
possa ser usado mais vezes.
Políticas de Substituição
Outra política é fazer a substituição do
bloco least recently used (LRU). Isso
leva a um bom desempenho, mas
requer hardware complexo para
manter o controle dos acessos aos
blocos.
Por fim, a política FIFO (First-In / FirstOut) mantém uma fila de tamanho N
para regular a entrada e a saída dos
blocos.
Políticas de Escrita
Quando se escreve num dado contido na
memória cache, é preciso restaurar a
coerência entre a informação contida nesta
memória e na memória principal. Há duas
grandes políticas para isso: write-through e
write-back.
Na técnica write-through, cada vez que se
escreve numa palavra da cache, atualiza-se
a memória principal. Isso é simples mas
pode levar a escritas inúteis e lentas, já que
a informação na cache poderia vir a ser
reescrita antes de voltar à memória principal.
Políticas de Escrita
Por outro lado, na política write-back,
só se atualiza a memória principal
quando o bloco é substituído e se ele
foi escrito. Nesse caso, é preciso
dispor de um bit extra, chamado de
dirty bit, em cada bloco, para indicar a
necessidade de atualizar a memória
principal ao se retirar o bloco da
cache.
Impacto no Desempenho do
Sistema
O projeto e configuração de caches
pode ter um grande impacto no
desempenho do sistema e no seu
consumo de potência.
Alguns parâmetros fundamentais:
tamanho da cache, grau de
associatividade, tamanho de bloco (ou
linha).
O tamanho da cache é medido
diretamente pelo número de bytes que
ela pode conter.
Impacto no Desempenho do
Sistema
Aumentar a memória leva a uma
diminuição em cache misses, mas o
acesso a palavras pode ser mais lento.
Um exemplo do livro-texto ajuda a tornar
isso mais claro. Imagine que projetemos
uma memória cache pequena, de 2
Kbytes, para o processador. Ela possui
15% de misses. O custo de acessar a
memória principal é de 20 ciclos, e o
custo de acessar apenas a cache é de 2
ciclos. Nesse caso, temos 0,85*2 +
0,15*20 = 4,7 ciclos em média.
Impacto no Desempenho do
Sistema
Suponha agora que tenhamos uma
memória de 4Kbytes. Ela tem taxa de
acerto de 93,5%, mas requer um ciclo
extra para acesso. Temos 3*0,935 +
0,065*20 = 4,105 ciclos. Há uma
melhora. Porém suponha que usemos
agora uma memória de 8Kbytes.
Nesse caso, temos 94,435% de
acerto, mas a um custo de um ciclo a
mais para acesso à cache. Agora,
teríamos 4,8904 ciclos em média,
uma piora.
Impacto no Desempenho do
Sistema
Note que um aumento indiscriminado
pode levar a uma piora em termos de
tempo. Usualmente os projetistas evitam
isso tornando a cache associativa ou
aumentando o tamanho de bloco. No
entanto, também há penalidades de
latência nesses casos.
Para concluir, apresentamos um gráfico
que mostra o efeito do grau de
associatividade no desempenho da
cache para um conjunto de benchmarks.
Impacto no Desempenho do
Sistema