O conceito de massa como grandeza derivada do movimento
Rodrigo de Abreu
Centro de Electrodinâmica e Departamento de Física do IST
Resumo
O conceito de massa é frequentemente introduzido através das leis de Newton.
Associado aos conceitos de força e de aceleração na 2ª Lei de Newton f = m a , que se
afirma ser válida em referenciais de inércia. Dado que as Leis de Newton não definem
força nem referencial de inércia o conceito de massa deve ser introduzido por outra via
que seja consistente com conceitos previamente estabelecidos, e aos quais se dê
prioridade. Os conceitos de espaço e de tempo permitem introduzir dois dos conceitos
definidores do movimento - velocidade e aceleração. Mostra-se que admitindo
propriedades de simetria do espaço o conceito de massa emerge como uma relação entre
distâncias, a relação entre as distâncias dos centros de duas esferas de massa m e mp
(massa padrão) e um ponto que se designa por centro de massa e que se encontra em
repouso e em torno do qual as massas descrevem um movimento central. A grandeza
massa é definida pelo movimento. As esferas gravitam em torno do centro de massa
com acelerações na relação das massas, na relação das distâncias ao centro de massa.
Admite-se, inicialmente a aproximação clássica em que o tempo é o mesmo por toda a
parte, qualquer seja o referencial, isto é, admite-se que a velocidade não tem um limite
superior. Nesta aproximação a massa é constante. As correcções relativistas resultam da
existência de um limite superior para a velocidade.
Introdução
Começamos em 1. por apresentar, resumidas ao essencial, algumas das críticas
mais recentes, do final do século passado e deste século, às leis de Newton. Estas
críticas embora tenham contribuído para a formulação da relatividade por Einstein,
existem independentemente dos postulados de invariância da velocidade da luz e de
equivalência da massa inercial e gravitacional. Mostra-se em 2. que se se admite que o
movimento de uma esfera na presença de outra esfera num espaço que se admite
homogéneo e isotropo é uma curva, então existe uma lei de aceleração universal que
permite introduzir a noção de massa. As massas são os coeficientes que definem o
referencial onde se verificam as condições de simetria do movimento. Aparecem,
simultaneamente, numa equação de variação da quantidade de movimento e numa lei de
aceleração universal, que necessariamente, varia com o inverso do quadrado da
distância aos centros das esferas que se consideram. As leis de Kepler emergem como
caso particular, quando uma das massas tende para infinito. A equivalência da massa
inercial e gravitacional não se põe.
Em 3. através de um modelo unidimensional obtêm-se com simplicidade as
equações corrigidas pela introdução da existência de uma velocidade limite. Dado que
no referencial acelerado o movimento é descrito com uma aceleração g a massa deve
poder ser descrita cinemáticamente, aceleramos um corpo em relação às massas que o
constituem. As equações permitem facilmente interpretar a dependência da massa do
seu conteúdo energético. “Acelerar” um corpo é equivalente a “travar” um corpo. Massa
inercial e gravitacional são equivalentes.
O campo electromagnético, ao introduzir a noção de carga tem de ser consistente
com a noção de massa, o electromagnetismo é consistente com a gravitação. Em 4. com
o recurso às formas diferenciais mostra-se a consistência das equações de Maxwell com
a força de Lorentz e a força de Newton. Dado a força ser uma grandeza derivada,
emerge da contracção da forma de Faraday com a velocidade u.
1. A crítica às leis de Newton.
As Leis de Newton têm sido criticadas por diversos autores. São bem
conhecidas as críticas de H. Hertz, A. Kirchhoff, W. Clifford, A. Edington, H.
Poincaré, E. Mach, L. Eisenbud, M. Jammer, R. Brehme, J. Anderson, S. Jodra,
A. Bouquet [1-12]. Fundamentalmente estas críticas baseiam-se nas duas
considerações seguintes:
a) A 1ª Lei de Newton que afirma que um corpo está em repouso ou em
movimento uniforme em linha recta a não ser que esteja actuado por
uma força pressupõe que se sabe o que é força, dado que se um corpo
estiver em movimento rectilíneo e uniforme num referencial não está
em movimento rectilíneo e uniforme em outros referenciais. Como
afirmava Edington um corpo está em movimento rectilíneo e
uniforme excepto se não estiver. É possível introduzir uma função
força, grandeza derivada e com carácter formal. E verificar que esta
função pode ser nula num referencial e não ser nula noutro.
b) A 2ª Lei de Newton que afirma que a alteração do movimento é
proporcional à força actuante e feita na direcção da força, pressupõe
que o conceito de força já foi anteriormente estabelecido, o que não é
o caso. De forma equivalente podia introduzir-se o conceito de Gorce
[13] ou de Xanandu [7]. Acresce a esta critica a de que o movimento,
hoje designado por quantidade de movimento, é definido pelo
produto da massa pela velocidade o que pressupõe a definição de
massa. Newton ao introduzir f = m a, pretendia que a força f existia e
ao actuar numa massa m imprimia-lhe uma aceleração a e não que ao
produto da massa pela aceleração se designasse f [7, 14].
2. A massa como grandeza definida pelo movimento.
A noção de massa emerge associada a duas experiências que estão
intimamente relacionadas, mas que podem parecer ser distintas: a de peso de um
objecto e a dificuldade em empurrar, puxar, ou travar um corpo (ver 3.).
Podemos relacionar estas duas ideias. Notemos desde já, que ao peso está
associada a ideia de que existe uma direcção distinta das outras, a direcção que
designamos por vertical. E se empurrarmos numa direcção horizontal a
2
dificuldade em empurrar é independente da direcção horizontal que se
considere. Esta dificuldade não depende da direcção escolhida, desprezado que
seja o atrito com a superfície onde deslize o corpo.
Considere-se um espaço que se identifique com esta ideia de isotropia
associada ao plano horizontal. Designemos esse espaço por referencial
Newtoniano[7]. Admitamos que era possível eliminar o campo gravitacional.
Deixávamos de ter a vertical como direcção privilegiada. Tudo se passa nesse
espaço isotropicamente. O espaço interior ao “space shutle” é bom exemplo de
espaço onde vigora esta isotropia.
Consideremos que num espaço homogéneo e isótropo introduzimos
uma esfera homogénea. È de admitir que a haver perturbação na homogeneidade
e isotropia do espaço devido à presença da esfera esta perturbação se faça de
acordo com uma simetria esférica. Imaginemos que introduzimos uma segunda
esfera também homogénea e comecemos por admitir que longe de qualquer das
esferas que se considere o espaço não sofreu qualquer alteração, isto é a
dificuldade em por em movimento uma esfera é independente da direcção. Se
neste espaço duas esferas forem introduzidas com velocidades v1 e v2 a direcção
e módulo das velocidades permanece durante o movimento, pelo menos
aproximadamente. Consideremos a linha recta que une o centro das duas esferas.
Escolhamos um ponto arbitrário nesta linha entre os dois centros. É evidente
que este ponto se movimentará com velocidade constante. Se definirmos um
referencial em movimento com este ponto o movimento das duas esferas neste
referencial também é rectilíneo e uniforme. Generalizemos as considerações que
acabamos de fazer admitindo que as trajectórias das duas esferas não são rectas
mas sim curvas e que apenas em determinadas condições experimentais são
aproximadamente rectas – podem ser, por exemplo arcos de uma circunferência
cujo raio é muito maior do que o arco que se está a considerar. Procuremos
analiticamente representar estas considerações.
Introduzamos m1 e m2 tal que
m1 r1 + m2 r2 = 0
(1)
e portanto, derivando em ordem ao tempo, uma e duas vezes
m1 v1 + m2 v2 = 0
(2)
m1 a1 + m2 a2 = 0
(3)
e
em que r1, r2, v1, v2, a1 e a2 são respectivamente os vectores de posição, as velocidades e
os vectores aceleração dos centros das esferas 1 e 2 em relação ao ponto intermédio
definido pelos parâmetros m1 e m2 e que se designa por Centro de Massa, CM.
3
Os vectores aceleração a1 e a2 passam pelo centro das esferas 1 e 2 e por CM
dado estarmos a admitir que as esferas são homogéneas. As esferas comportam-se como
se fossem pontos, os centros das esferas. Para que tal se verifique é necessário que a
aceleração tenha a forma
ai = mj (ri- rj)/⏐(ri- rj)⏐3
(4)
dado que a aceleração resultante das acelerações dos vários pontos da esfera tem de ser
igual à aceleração do centro da esfera. De facto, admitamos que existe uma classe de
curvas associadas ao movimento das esferas r1 (t) e r2 (t). Dada a isotropia e
homogeneidade do espaço ai = f (⏐(ri- rj)⏐) (ri- rj)/ ⏐(ri- rj) ⏐. Admitamos que existe
um ponto que está em repouso entre os dois centros, que verifica (3). Se o ponto existe
então se colocarmos o centro de uma esfera l, de massa arbitrária ml nesse ponto a
aceleração tem de satisfazer a (4), dado a aceleração resultante sobre os vários pontos l
da esfera l associada aos pontos j e i das esferas j e i só é zero no centro da esfera l se se
verificar (4). Reciprocamente se se verifica (4) então existe um ponto entre as duas
esferas que está em repouso, que satisfaz simultaneamente a (3).
Em resumo: se admitirmos que duas esferas com velocidades v1 e v2 se deslocam
num espaço homogéneo e isótropo, o movimento das esferas pode ser definido pelas
equações anteriores. Existe um ponto nesse espaço que está parado ou em movimento
rectilíneo e uniforme. m1 e m2 são as massas das esferas. As massas estão na razão das
distâncias ao centro de massa. Escolhida uma massa padrão mp as massas poderiam ser
medidas através da relação das várias distâncias associadas ao movimento. A outra
forma de medir m é através da aceleração do planeta terra e através da aceleração de
uma mola que se lhe oponha e que se admite proporcional à elongação da mola. Os
resultados experimentais da observação do movimento dos planetas em torno do sol,
sintetizados por Kepler nas suas três leis 1 , levaram Newton a formular leis que davam
conta desse movimento. De facto se a massa de uma das esferas consideradas
anteriormente tender para infinito (a massa do sol é muito superior à massa de cada
planeta) a aceleração a que fica sujeito o planeta i é dado por (4) onde mj passa a ser a
massa do sol e ri- rj é a distância do centro do planeta ao centro do sol. A órbita do
planeta é uma elipse e o sol está num dos focos da elipse. Neste caso a aceleração da
esfera i não depende de mi. Temos de imediato a razão de ser do princípio de
equivalência de Einstein, dado que a questão relativa à igualdade da massa inercial e
gravitacional nem sequer se põe. A relatividade geral emerge das condições anteriores
mais a condição da existência de uma velocidade limite. È possível estender as
condições anteriores para outras situações :
Introduzamos um vector de posição do centro de massa em relação a um outro
referencial que não adira ao centro de massa. Temos evidentemente que
R = mi ri /m,
(5)
1
Se a aceleração varia com o inverso do quadrado da distância todas as curvas correspondentes ao movimento, para um mesmo
ângulo centrado no sol, definem dois pontos em que se verifica igual variação da velocidade. De facto dado a aceleração ser dirigida
para o sol e variar com o inverso do quadrado da distância a variação de velocidade não depende do raio dado o tempo de percurso
entre os dois pontos da curva ser proporcional ao quadrado do raio. Esta condição é satisfeita se as trajectórias forem cónicas em que
o sol está num foco [15]. Tal verifica-se mesmo que a trajectória seja uma hipérbole, e se esteja a considerar partes da hipérbole
próximas da assimptota. Parece uma recta, mas não é uma recta. As “rectas” são cónicas.
4
em que se usou a convenção de Einstein da soma nos índices repetidos (mudos) e m é a
soma dos mi, e i varia de 1 a N. È evidente que se soubermos o movimento no centro de
massa através de (5) podemos determinar o movimento em qualquer outro referencial,
isto é podemos determinar R em função do tempo, qualquer que seja o referencial.
Trata-se de um problema puramente cinemático. Por exemplo: consideremos duas
esferas em queda livre num campo gravitacional constante. Temos que a aceleração das
várias massas mi é constante e igual à aceleração do centro de massa. O referencial do
centro de massa é um referencial Newtoniano e o movimento das massas mi no
referencial
onde existe a aceleração constante está completamente resolvido.
Consideremos como segundo exemplo o do movimento de uma carga eléctrica em
movimento na presença de uma outra carga eléctrica de massa muito elevada, fixa. A
generalização compatível com a experiência resulta da sobreposição à aceleração
gravitacional de uma aceleração Coulombiana em tudo idêntica à aceleração universal
da gravitação. A generalização e busca de covariância das leis da Física emergiu da
noção fundamental de massa, ligada ao movimento (ver 4.). Esta associação ao
movimento foi feita por Newton. Mas a relação entre massa inércial e gravitacional
ficou escamoteada devido à introdução do conceito considerado essencial de força. O
cálculo da força a partir da variação da quantidade de movimento por unidade de tempo
permite obter de forma simples interpretações muito interessantes [7, 14, 16, 17]. Dado
poder ser ponto de partida é fundamental que se compreenda de forma clara quais os
pressupostos que lhe estão associados e que se evitem eventuais definições tautológicas
que poderão originar dificuldades de compreensão ou falsas interpretações [7, 14, 18,
19].
3. As correcções relativistas
A transformação de Lorentz emerge da existência de uma velocidade limite [20,
21].
A noção de tempo está associada à noção de distância através da noção de movimento,
da ideia de velocidade. Associada a massa ao movimento, a transformação de Lorentz,
inevitavelmente, corrige as expressões da física clássica, não relativista. Podemos
construir um formalismo quadridimensional e descrever a energia e o momentum
através de um quadrivector, cuja norma, localmente, é dada por
E 2 − p 2 k 2 = m0 k 2
(6)
em que E é a energia, p o módulo da quantidade de movimento e k a velocidade limite
[20].
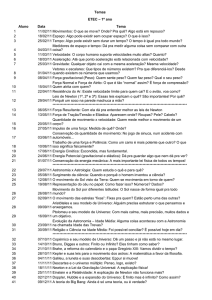
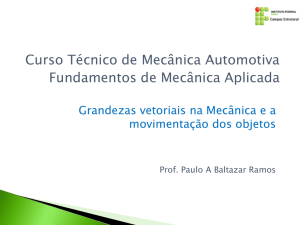
Consideremos uma caixa de altura H, com uma aceleração g em relação a um
determinado referencial Newtoniano RN:
B
g
H
RN
g
A
Fig. 1
A massa m indicada pela esfera move-se perpendicularmente a A e B. No interior da caixa
a massa m fica submetida a uma aceleração g
5
No interior da caixa qualquer massa m é submetida a uma aceleração igual a g
mas com sentido contrário como se indica na fig. 1. Vamos seguidamente demonstrar
que o resultado das colisões da massa m em A e B dá origem a uma força, obtida
através da variação da quantidade de movimento por unidade de tempo, que é igual à
massa m multiplicada por g [22]. A massa da caixa contêm a massa da esfera, embora a
esfera “voe” entre A e B – a massa é um efeito cinemático [22]. Obtemos deste modo
uma interpretação da massa consistente com a definição dada em 2., diferente da que se
pode obter através de um dado modelo electromagnético [23, 24], mais de acordo com
outro[25-27].
A conservação da energia do movimento entre A e B permite escrever
m A k 2 = m B k 2 + m B gh = m B k 2 (1 +
gH
)
k2
(7)
De (6), temos
p 2 k 2 = E 2 − m02 k 4
(8)
Em A e B, (7) e (8) permite escrever
m A2 k 4 − m02 k 4 = p A2 k 2 = m B2 k 4 (1 +
p A2 k 2 = p B2 k 2 + mB2 k 4
gH 2
) − m02 k 4
2
k
gH
gH
(
2
+
)
k2
k2
(9)
(10)
e se gh << k 2
p A2 = p B2 + 2mB2 gH
(11)
De (11) temos
m A2 v A2 = m B2 v B2 + 2 m B2 gH
(12)
m02 v A2
m02
=
(v B2 + 2 gH ).
2
2
v
v
1 − A2 1 − B2
k
k
Obtemos, desta forma um resultado consistente com
que se pode escrever
v A = v B2 + 2 gH
6
H
, e dado estarmos a considerar gh << k 2 . De facto quando gH << k 2 , se
v A + vB
2
v A2 , B
v A2
v B2
(v B + gt ) 2
= 1 − 2 ≅ 1. Se v B → k , v A → k e (1 − 2 ) = 1 −
≅ 1− 2 .
k
k
k2
k
dado v A = v B + gt A e t A =
-2
v B << k , v A << k e γ A,
B
De (11) temos
( p A − p B )( p A + p B ) = 2m B2 gH ,
(13)
2m B2 gH
,
p A + pB
(14)
p A = pB +
2m A v A = 2m B v B + 2 × 2m B2 gH /(m A v A + m B v B ),
2m A v A = 2m B v B + m B g 2 H /(
e como
γA
v A + v B ) / 2.
γB
(15)
(16)
gH << k 2
2 m A v A = 2 m B v B + m B gT
(17)
em que T é o período entre colisões em A e B. Obtemos deste modo que a força em A,
FA, e em B, FB satisfazem a
F
A
= F
B
+ m
B
g
(18)
No limite clássico temos
v A = v B + gt A
(19)
2m0 v A = 2m0 v B + m0 g 2t A
(20)
FA = FB + m0 g
(21)
7
v B → k , emon
Quando
hω
A
2hω
k
[20,
28 ], temos
= h ω B (1 + gH / k 2 )
A
=
(22)
2hω B
(1 + gH / k 2 )
k
(23)
T = 2H / k
(24)
2hω
kT
(25)
A
=
2hω B
(1 + gH / k 2 )
kT
F A = FB +
2hω B
gH / k 2
kT
(26)
F A = FB +
hω B
g
k2
(27)
4. A força de Newton e sua relação com a força de Lorentz: a
transformação de E e de B.
Seguidamente mostra-se a consistência das equações de Maxwell com a força de
Newton, bastando para tal que a grandeza derivada f=dp/dt, seja igual a f=q(E+v x B),
a força de Lorentz. De facto as equações de Maxwell contêm a informação associada à
força de Lorentz, dado que a forma de Faraday contraída com o o quadrivector
velocidade define o quadrivector força de Lorentz. Se as equações de Maxwell resultam
da aplicação de uma estatística quântica às partículas do campo electromagnético [28,
29], então as partículas do campo electromagnético dão origem à força de Lorentz que
determina o movimento consistentemente com a gravitação, com a massa [30, 31].
Consideremos o 4-vector força de Minkowski
Fα =
dP α
.
dτ
(28)
Escrevamos a transformação de Lorentz:
.
x 0 = ( x 0 + βx1 )δ ( β )
(29)
x1 = ( x 1 + βx 0 )δ ( β )
(30)
x2 = x 2
(31)
x3 = x3
(32)
8
em que
1
δ ( β ) = (1 − β 2 ) 2 .
F 0 = ( F 0 + βF 1 )δ ( β )
(33)
F 1 = ( F 1 + βF 0 )δ ( β )
(34)
F2 = F 2
(35)
F3 = F3
(36)
em que
F α = (γ ( f .u ), γf )
em que γ = (1 − u 2 ) −1 / 2 , u é a velocidade da partícula em S e f é a força de Newton
f = dp / dt .
O 4 - vector
velocidade
U α = ( γ , γ u ) em que U
Temos portanto
0
de Minkowski
= (U
0
é
− β U 1 ) δ ( β ).
γ = ( γ − βγ u x ) δ ( β ) = δ ( β ) γ (1 − β u x )
(37)
De (33 ) e (37) temos
( f .− u) =
( f .u ) − β f x
1 − βu x
(34 ) e (37 ) permitem
f − β ( f .u )
f x = x
1 − βu x
(38)
escrever
(39)
Se f = q ( E + u × B ) então
f x = qE x + q ( u y B z − u z B y ). (37), (38) e (39) permitem
BZ =
Ey =
Bz − βE y
1− β
2
E y − βBz
Ex = Ex
1− β
2
By =
EZ =
determinar
B y + βE z
1− β
2
E z + βBz
1− β
2
Bx = Bx
9
As equações de Maxwell escrevem-se no espaço de Minkowski [30, 32]
dF = 0
(40)
d F = Z0 J
*
*
em que Z 0 =
(41)
ε0
, F e *F são a forma de Faraday e o seu dual,
μ0
F = EΛdt + B.
(42)
Se contrairmo s F com U (4 - vector vel ocidade ) temos
F (u) =< Edx 0 + B, U >=< Edx 0 + B, U >=< Edx 0 > + < B, U >
(43)
que pode ser escrito na forma [25]
F (u) = γ ( E.u)dx 0 − γE − γ (u × B) i dx i
(44)
em que i = 1, 2 e 3. Logo o 4 - vector associado a qF (u) é o 4 - vector força de Lorentz
f l i = ( qγ ( E.U ), γ ( qE + q(u × B))
(45)
em que i = 0, 1, 2 e 3.
CONCLUSÃO
As Leis de Newton são o ponto de partida, o alfa da física teórica. Assim sendo é
natural que dificuldades surjam a jusante, se tiverem origem a montante, na nascente.
Mostrou-se que o conceito de massa pode ser estabelecido através do movimento. A
ideia de que o movimento “natural” é rectilíneo e uniforme cria preconceitos, ideias
feitas, mas que não resistem a diversas análises críticas, que têm sido feitas. O
movimento só faz sentido se definido em relação a um conceito primeiro. Ao “éter”, ao
Zero Point Field, em relação a um “corpo”, ao “espaço”. As diversas teorias da
Gravitação surgem destas conceptualizações do movimento. Newton pensou no
movimento em relação ao “espaço absoluto”. Einstein pensou no movimento num
“espaço curvo”. Rosen pensou no movimento num espaço plano em que os padrões de
medida é que mudam. Duas esferas bastam para que se possa começar a estruturar o
10
movimento. Se se admite que duas esferas se movem segundo curvas que revelam a
simetria das esferas, então existe uma lei de aceleração universal que revela esta
simetria. O movimento “natural” não tem necessariamente que ser rectilíneo e uniforme.
Admitir que o é, pode ser um preconceito, do qual só com dificuldade nos consigamos
livrar. Da mesma forma pode ser que a assunção de que a velocidade não está limitada
seja apenas um preconceito, e não uma firmação que se deva considerar óbvia,
inevitável. Pode ser que resulte apenas da experiência a baixas velocidades. A noção
que temos de tempo, como um absoluto, está intimamente ligada a esta experiência
limitada das baixas velocidades. Newton poderia ter chegado à conceptualização da
relatividade restrita se tivesse posto em causa a ideia de que a velocidade não estava
limitada. E para tal não necessitava do “resultado”, que por vezes se afirma ser
experimental, de que a velocidade da luz no vácuo é a mesma em todos os “referenciais
de inércia”. Não existem experiências que mostrem que a velocidade da luz é a
velocidade limite, e não uma velocidade próxima da velocidade limite. As experiências
corroboram as teorias ou não. Se se admite que a velocidade da luz é a velocidade limite
não se pode experimentalmente mostrar que não o é (na hipótese de o não ser),
directamente, se diferir de uma quantidade experimentalmente muito pequena da
velocidade limite (as experiências de Michelson-Morley-Miller, embora baseadas na
ideia de que a luz se propagava no éter, mostraram a dificuldade de se tirar uma
conclusão pela negativa. Teoricamente, no entanto não é indiferente pensar-se que é a
velocidade limite ou que está próxima da velocidade limite, porque “praticamente” a
“luz” passava a poder estar parada, na segunda teoria ! Se Newton juntasse à limitação
da velocidade, a ideia de que o movimento livre, “natural”, é uma curva, tal bastaria
para que chegasse também à conclusão de que o tempo dependia do local, e não apenas
do referencial. De facto, a classe de curvas que revelam a simetria do movimento de
duas esferas permitem definir a massa das duas esferas através da aceleração que tem de
variar com o quadrado da distância ao centro das duas esferas e satisfazer a uma lei de
conservação da quantidade de movimento. Os diversos movimentos possíveis das duas
esferas dependem de dois coeficientes que são as massas das esferas. Os movimentos
possíveis são todos matematicamente equivalentes. No caso de uma das esferas ter
massa “infinita” o movimento da outra esfera é uma cónica, “centrada” na primeira
esfera. Newton ao atribuir ao movimento dos planetas a atracção do sol, de uma força
que actuava no planeta, contaminou as análises posteriores com tal pressuposto. Com a
ideia de força. Deu uma explicação. Não se limitou a uma descrição. Generalizou
experiências do quotidiano (evidentemente que não nos estamos a referir à associação
genial da queda da maçã e da lua) para o movimento sem contacto de um planeta em
torno do sol. De facto a lei da aceleração universal introduz uma só massa, e não dois
conceitos de massa, inercial e gravitacional. A força de atracção universal é que
necessitava de um outro conceito de massa que lhe desse um carácter autónomo,
independentemente da massa inercial. Com um só conceito, Newton, como mais tarde
Einstein, prescindiria de um princípio de equivalência. Com uma partícula a oscilar
entre duas placas A e B, facilmente se atinge a transformação de Lorentz. Se conclui
que o tempo depende da altura (através do efeito Mössbauer) e se conclui que a massa
pode ser interpretada como um efeito cinético, que não depende da interacção com o
vácuo, como recentemente se sugeriu. È que pode ser que a adesão do formalismo
electromagnético ao da gravitação resulte não de uma realidade física mas de um
acidente formal, resultado de Newton ter introduzido a força não como grandeza
derivada mas sim como entidade física fundamental. É a carga conceito primeiro e a
massa grandeza derivada (conforme recentemente foi sugerido por Haisch, Rueda e
Puthoff) ou a recíproca é que é verdadeira?
11
REFERÊNCIAS
1. Hertz, H. Principles of Mechanics (The Macmillan Company, New York,
1889).
2. Kircchhoff, A. Vorlesung über Mathematishe Physic: Mechanik (Leipzig,
1874).
3. Clifford, W. K. The Common Sense of the Exact Sciences (Appleton and
Company, New York, 1885).
4. Edington, A. S. The Nature of the Physical World (The Macmillan
Company, New York, 1929).
5. Poincaré, H. La Science et l’Hypothèse (Ernest Flamarion 26, Rue Racine,
Paris) (1943).
6. Mach, E. Science of Mechanics (Open Court Publishing Company, La Salle,
Illinois, 1942).
7. Eisenbud, L. Am. J. Phys. 26, 144 (1958).
8. Anderson, J. L. Am. J. Phys. 58, 1192 (1990).
9. Brehme, R. W. Am. J. Phys. 53, 952 (1985).
10. Jammer, M. La Recherche 5, 221 (1974).
11. Jodra, S. Science et Vie (Hors Serie), nº 20, p.6 (1998).
12. Bouquet, A. Science et Vie (Hors Serie), nº 20, p.74 (1998).
13. Feynman, R. Leighton, R. Sands, M. The Feynman Lectures on Physics
(Addison-Wesley, Reading, Massachussets) vol. 1, 12-1 (1976).
14. Abreu, R. de Técnica 3, 47 (1994).
15. Goodstein, D. L. Goodstein, J. R. A lição esquecida de Feynman (Gradiva,
Ciência Aberta) (1996).
16. Abreu Faro, M. Abreu, R. A one-dimensional model of irreversibility, EPS
10, TRENDS IN PHYSICS, 314, SEVILHA (1996).
17. Abreu Faro, M. e M. Hermínia Marçal Energia confinada em cavidade de
parede móvel. Análise da evolução para o equilíbrio. Interpretação física.
Memórias da Academia das Ciências de Lisboa, Classe de Ciências, Tomo
XXXVIII, 1998.
12
18. Tiersten, M. and Soodak, H Am. J. Phys. 66(9), 810 (1998).
19. Abreu, R. Tese de doutoramento, IST (1983).
20. Abreu, R. Gazeta de Física vol. 21, fasc. 3, 9 (1998).
21. Resina Rodrigues, J. M. Introdução à teoria da relatividade restrita (IST
PRESS, Instituto Superior Técnico, Lisboa) p.21 (1998).
22. Abreu, R. Termodinâmica de uma massa imersa numa atmosfera (a
publicar).
23. Haisch, B. Rueda, A. Puthoff, H. The Sciences, Nov/Dec., 2 (1994).
24. Haisch, B. Rueda, A. Puthoff, H. Inertia as a Zero Point Field Lorentz Force
Phys. Rev. A, 49, 678-694 (1994).
25. Einstein, A. Sobre a Electrodinâmica dos Corpos em Movimento, Textos
Fundamentais da Física Moderna, O Princípio da Relatividade (Fundação
Calouste Gulbenkian-reprodução de Ann.d. Phys. 17 (1905)), 47 (1972).
26. Einstein, A. A Inércia de um corpo será dependente do seu conteúdo
energético?, Textos Fundamentais da Física Moderna, O Princípio da
Relatividade (Fundação Calouste Gulbenkian-reprodução de Ann.d. Phys. 17
(1905)), 87 (1972).
27. Einstein, A. Os Fundamentos da Teoria da Relatividade Geral, Textos
Fundamentais da Física Moderna, O Princípio da Relatividade (Fundação
Calouste Gulbenkian-reprodução de Ann.d. Phys. 17 (1905)), 141 (1972).
28. Mayants, L. Phys. Essays 2(3), 223 (1989).
29. Dyson, F. Am. J. Phys. 58(3), 209 (1990).
30. Abreu, R. Aplicação das formas Diferenciais à Electrodinâmica Relativista,
Tese Complementar de Doutoramento, IST (1983).
31. Resina Rodrigues, J. M. Introdução à Teoria da Relatividade Restrita (IST
PRESS, Instituto Superior Técnico, Lisboa) p.72 (1998).
32. Abreu Faro, M. Formas Diferenciais e Electromagnetismo, Centro de
Electrodinâmica (1981).
13