Medição de Fenômenos Biológicos
Sensores Resistivos e Circuitos de Medida
Sensores resistivos (potenciômetros, termistores, rtd, strain-gage, ...)
Medição de Fenômenos Biológicos – UFRJ, 2013/2
1
Controle de Versões
2013
Versão 1 – Com base nas notas de aula de COB783 e Op Amp Applications
Handbook, Section 4, edited by Walt Jung (Newnes, 2006).
Última alteração: 10/05/2013
Medição de Fenômenos Biológicos – UFRJ, 2013/2
2
Índice
4 Transdutores Resistivos....................................................................................................................4
4.1 Transdutores Potenciométricos.................................................................................................4
4.1.1 Exemplos de aplicações....................................................................................................7
4.2 Termistores...............................................................................................................................7
4.2.1 Exemplos de aplicações..................................................................................................15
4.3 Resistências termômetro (RTD).............................................................................................15
4.4 Strain Gauge...........................................................................................................................17
4.5 Transdutores piezo resistivos..................................................................................................23
5 Circuitos Comuns com Amplificador Operacional........................................................................26
5.1 Amplificador inversor.............................................................................................................26
5.2 Amplificador não-inversor:.....................................................................................................26
5.3 Amplificador somador............................................................................................................27
5.4 Amplificador subtrator............................................................................................................28
5.5 Amplificador de instrumentação.............................................................................................31
5.6 Conversores Tensão Corrente.................................................................................................32
6 Circuitos Condicionadores em Ponte de Wheatstone.....................................................................34
6.1.1 Medições de resistência em ponte de Wheatstone..........................................................39
6.1.2 Instrumentação para medidas remotas............................................................................43
6.1.3 Problemas com offset......................................................................................................45
6.1.4 Problemas com a temperatura.........................................................................................49
Medição de Fenômenos Biológicos – UFRJ, 2013/2
3
4 Transdutores Resistivos
4.1 Transdutores Potenciométricos
É basicamente um potenciômetro, devidamente excitado (transdutor ativo segundo a nossa
definição prévia), no qual a tensão variável obtida no cursor é modificada em decorrência da ação
de alguma variável mecânica, tal como uma força ou aceleração.
Este é um tipo de transdutor considerado como um transdutor de grande variação de sinal
uma vez que a saída pode variar de 0 a própria tensão da fonte de excitação.
Existem, na prática, vários tipos de potenciômetros possíveis de serem utilizados na
construção deste tipo de transdutor, sendo cada tipo responsável pelas características finais do
mesmo.
A análise no circuito nos mostra que
v out =v in⋅
R L // x⋅R p
,
R L // x⋅R p1− x⋅R p
Medição de Fenômenos Biológicos – UFRJ, 2013/2
4
mas considerando R L =⋅R p
⋅R p⋅x⋅R p
⋅R p x⋅R p
v out =v in⋅
⋅R p⋅x⋅R p
1−x ⋅R p
⋅R p x⋅R p
2
⋅x⋅R p
v out =v in⋅
2
2
2
⋅x⋅R p⋅1−x ⋅R p x⋅1−x ⋅R p
⋅x
v out =v in⋅
x⋅1− x
Porém seria desejável que a saída expressasse somente o deslocamento x, isto é
v out
=x (caso obtido com R L =∞ )
v in
Se o erro relativo entre a função de transferência real e a ideal for definido como
erro=
v out
v in
−
real
v out
v in
v out
v in
ideal
ideal
então
⋅x
−x
x⋅1− x
erro=
x
erro=
−x⋅1−x
x⋅1− x
Derivando-se a função de erro com relação a x e igualando-a a zero, obtém-se a posição de
erro máximo
Medição de Fenômenos Biológicos – UFRJ, 2013/2
5
∂erro [ x⋅1− x]⋅2⋅x−1−x⋅1− x⋅2⋅x−1
=
=0
∂x
[x⋅1−x ]2
∂erro ⋅ 2⋅x −1 x⋅1−x ⋅2⋅x−1−x⋅1− x⋅2⋅x−1
=
=0
2
∂x
[x⋅1−x ]
⋅2⋅x−1
∂erro
=
=0
2
∂x
[ x⋅1− x]
logo
⋅2⋅x−1=0
x=0,5
Então o maior erro, em relação ao valor ideal, ocorre quando o cursor está no meio do curso,
sendo que tal erro é igual a
erro máx =erro x=0,5 =
erro máx =
−0,25
0,25
erromáx =
−1
1
0,25
erro máx =
−1
14⋅
−x⋅1−x
x⋅1−x
Ou seja, o erro máximo é função de α, como esperado. Supondo-se =1 ( R L =R p ) temos
erromáx =
−1
=20 %
14
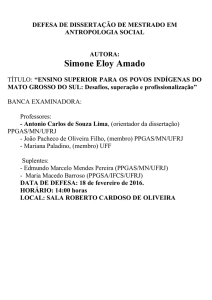
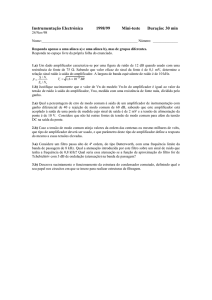
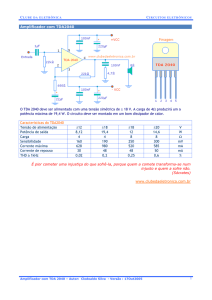
Na figura abaixo são apresentadas as curvas de erro absoluto e relativo com relação a
posição x além dos valores de v(out) para o caso ideal e real onde a vin=1V, RL=10kΩ e RP=10kΩ.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
6
4.1.1 Exemplos de aplicações
4.2 Termistores
São resistores sensíveis à temperatura, que apresentam resistência variando com coeficiente
negativo com temperatura (NTC – os mais comuns) ou positivo (PTC).
Medição de Fenômenos Biológicos – UFRJ, 2013/2
7
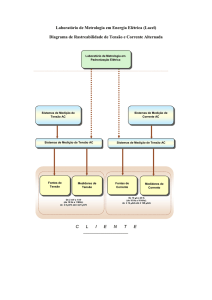
Comparação entre diferentes tipos de sensores de temperatura. Sensors in Biomedical
Applications, Fundamentals,Technology and Applications, Gárbor Harsányi, CRC Press, 2000
http://www.efunda.com/designstandards/sensors/thermistors/thermistors_theory.cfm
Os materiais classicamente utilizados na construção de termistores são semicondutores, uma
vez que a sua resistividade é muito maior do que a resistividade dos metais condutores.
A resistência de um termistor pode ser descrito aproximadamente por
Medição de Fenômenos Biológicos – UFRJ, 2013/2
8
RT =R0⋅e
⋅
1 1
–
T T0
onde R0 é a resistência na temperatura de referência T 0
é uma constante que depende do material de construção
T é a temperatura em Kelvin
Tomando-se o logaritmo natural dos dois lados
ln [ R T ]=
− ln [ R0 ]
T T0
Chamando agora de recíproco da temperatura =
1
T
ln [R T ]=⋅−⋅0ln[ R0 ]
que é uma função linear de (onde é a inclinação da curva ln [R T ] versus ).
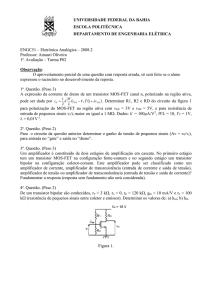
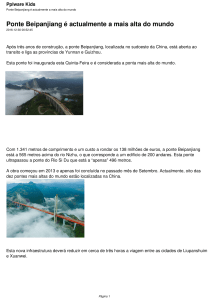
Na forma direta, a curva típica de um termistor é mostrada na figura abaixo, onde os valores
2000K até 5000K correspondem aos valores de β.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
9
Curvas características de NTCs comerciais (Epcos – Electronic Parts and Components)
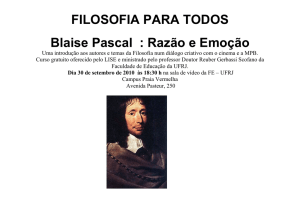
Em algumas aplicações é desejável uma relação linear entre a resistência e a temperatura.
Isto pode ser conseguido, para uma faixa limitada de temperatura, colocando-se um resistor fixo em
paralelo com o termistor. Embora isto acarrete uma redução na sensibilidade do dispositivo, a
sensibilidade original do termistor é relativamente alta, o que ainda garante um resultado final
satisfatório.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
10
Linearização de NTC com resistência em paralelo (Epcos – Electronic Parts Components)
Rp= RT⋅
−2⋅T
2⋅T
A equação acima mostra uma regra simples para linearização em torno de uma só
temperatura. Uma linearização melhor pode ser obtida utilizando-se dois pontos. O valor do resistor
a ser colocado em paralelo pode ser determinado pensando-se inicialmente que o paralelo será:
R=
R P⋅RT
, onde R P é o resistor de compensação e RT é o termistor.
R P RT
Diferenciando-se em relação a temperatura
[
∂R
∂R
R P RT ⋅ T – RT⋅ T
∂R
∂T
∂T
=R P⋅
2
∂T
R P R T
]
∂ RT
∂R
∂T
=R2P⋅
2
∂T
R PR T
Medição de Fenômenos Biológicos – UFRJ, 2013/2
11
é a inclinação da curva resistência versus temperatura.
Escolhe-se agora dois pontos da curva de RT versus temperatura de tal modo que eles
estejam a aproximadamente ¼ dos extremos (ponto 1 a ¼ do início e o ponto 2 a ¼ do final).
Tentaremos agora impor uma igualdade entre as inclinações de associação paralela nos
pontos 1 e 2, assumindo que todos os pontos no intervalo 1-2 terão tal inclinação. Então
∂ RT1
∂ RT2
∂T
∂T
2
2
R P⋅
= RP⋅
2
RP RT
R P RT 2
como
RT =RT = R0⋅e
−
⋅
1 1
–
T T0
= R ⋅e ⋅e
−
T0
0
∂ RT
T
=R0⋅e ⋅ − 2⋅e T
∂T
T
0
T
1
1
⋅ −
∂ RT
T T
=− 2⋅R0⋅e
∂T
T
0
∂ RT
=− 2⋅RT
∂T
T
então
∂ RT1
=− 2⋅RT1
∂T
T1
∂ RT2
=− 2⋅RT2
∂T
T2
Logo
Medição de Fenômenos Biológicos – UFRJ, 2013/2
12
−⋅RT1
T
2
P
2
1
−⋅RT2
T 22
2
P
R⋅
=R ⋅
RP RT1 2
R P RT2 2
R2P 2⋅R P⋅RT1 R2T1 ⋅
2
2
RT2
T 22
= R P2⋅R P⋅RT2 RT2 ⋅
2
2
2
2
2
2
RT1
T 21
2
2
2
2
R P⋅R T2⋅T 1 2⋅RP⋅RT1⋅R T2⋅T 1 RT1⋅RT2⋅T 1 – R P⋅RT1⋅T 2 – 2⋅R P⋅RT2⋅R T1⋅T 2 – RT2⋅RT1⋅T 2=0
supondo
o
cancelamento
dos
termos
2⋅R P⋅RT1⋅RT2⋅T 12 – 2⋅RP⋅RT2⋅RT1⋅T 22 ,
então
2
R2P⋅ RT2⋅T 21 – RT1⋅T 22=RT2
⋅RT1⋅T 22 – R2T1⋅RT2⋅T 21
e
R P=
2
RT2
⋅RT1⋅T 22 – R2T1⋅RT2⋅T 21
RT2⋅T 12 – RT1⋅T 22
A figura abaixo mostra um gráfico de R(T) linearizada por diferentes resistências RP.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
13
Os termistores podem operar em três faixas distintas de funcionamento caracterizadas pela
sua curva v x i. A figura abaixo mostra um exemplo de curva v x i de um dado termistor obtida a
temperatura constante.
Curva V x I de termistores (Epcos – Electronic Parts and Components)
Na curva observa-se uma região linear (onde o autoaquecimento é desprezível) utilizada
para medida de temperatura, uma região de máximo e outra onde a tensão diminui com o aumento
de corrente. Esta região pode ser utilizada em função do autoaquecimento do transdutor (limitadores
de corrente, sensores de nível para líquidos entre outros).
Uma especificação importante de um termistor é sua constante de dissipação, definida como
a potência (em miliwatts) que causa um aumento de 1ºC de autoaquecimento, para uma dada
temperatura. Valores típicos de tal constante são de 0,5 a 10mW/ºC, sendo a faixa típica de
temperatura de -55ºC a 150ºC
Uma outra importante especificação é a constante de tempo térmica, definida como o tempo
necessário para o termistor atingir 63,2% da diferença entre as temperaturas inicial e final do seu
corpo, quando é submetido a uma mudança abrupta da temperatura (idealmente uma função
Medição de Fenômenos Biológicos – UFRJ, 2013/2
14
degrau), assumindo-se uma condição de potência nula. Valores típicos da constante de tempo
térmica vão de 1 a 50s.
4.2.1 Exemplos de aplicações
4.3 Resistências termômetro (RTD)
São resistências dependentes da temperatura. Normalmente estas resistências são obtidas a
partir de metais ou ligas metálicas. Costumam ser muito lineares, muito estáveis e muito precisos.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
15
Measurement & Instrumentation Principles, Alan S Morris, Butterworth Heinemann, 2001
Seu coeficiente de temperatura é positivo e é capaz de operar em uma faixa de temperatura
muito maior que a dos termistores. Os materiais resistivos exibem uma variação da resistência com
a temperatura porém nem todos possuem características estáveis. Os materiais mais utilizados para
este tipo de sensor são a platina, o níquel e o cobre cuja equação característica e seus coeficientes
são apresentados a seguir.
2
3
RT =Ro⋅1⋅T −T 0 ⋅T −T 0 ⋅T −T 0 ...
Para o caso da Platina entre 0 e 850 ºC temos:
-6
αPt = 3907x10 /K;
-6 2
βPt = -0.5768408x10 /K
Para o caso do Níquel entre -50 e 180 ºC temos:
-6
-5 2
αNi = 5470x10 /K; βNi = 0.639x10 /K ;
Medição de Fenômenos Biológicos – UFRJ, 2013/2
-8 2
γNi = 0.69x10 /K
16
Para o caso do Cobre entre -50 e 180 ºC temos:
-6
αCu = 4260x10 /K (linear)
Estes transdutores apresentam resistência desde uma dezena de Ω até dezenas de kΩ. Assim
como nos termistores se deve evitar correntes de autoaquecimento (normalmente da ordem de
20 mA ou menos) e deformação física que podem fazer com que estes transdutores funcionem
como Strain-Gauges (mostrados a seguir). Estes transdutores apresentam resposta dinâmica lenta,
entre 0,5 e 5 segundos (aumenta com o encapsulamento) mas precisão de 0,01%, elevada
sensibilidade, comportamento razoavelmente linear em torno de um ponto de operação, saída
estável por longa faixa de tempo.
4.4 Strain Gauge
Alguns instrumentos biomédicos usam este tipo de transdutor no processo de conversão de
sua variável básica. Transdutores de pressão invasivos, normalmente montados em cateteres são
exemplos de tal fato.
Um strain gauge é um elemento resistivo que produz uma mudança na sua resistência
elétrica em função de uma deformação mecânica (strain). São dispositivos que apresentam
pequenas variações de sinal e que são normalmente utilizados com uma ponte de Wheatstone.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
17
Lembrando que a resistência deste fio é
Medição de Fenômenos Biológicos – UFRJ, 2013/2
18
R=
⋅L
A
⋅L
∂R
= ∂
∂R ∂R A
⋅L ∂ L
⋅L ∂ A
∂ R ∂ ⋅L ∂
=
⋅ ∂
⋅ ∂ ⋅
⋅
∂ R ∂ A ∂ R ∂ L A ∂ R ∂ A
A ∂R
L ∂ ∂ L ⋅L ∂ A
1= ⋅ ⋅
−
⋅
A ∂ R A ∂ R A2 ∂ R
⋅L
L
∂ R= ⋅∂ ⋅∂ L− 2 ⋅∂ A
A
A
A
Dividindo-se por
⋅L
A
⋅L
∂R
L
A
= ⋅∂ ⋅∂ L− 2 ⋅∂ A ⋅
R
A
A
⋅L
A
∂R ∂ ∂ L ∂ A
=
−
R
L
A
R L A
=
−
R
L
A
Medição de Fenômenos Biológicos – UFRJ, 2013/2
19
Consequentemente, a variação na resistência do elemento é causada por 3 fatores.
a) Mudança relativa do comprimento
b) Mudança relativa na secção transversal
c) Mudança relativa na resistividade
Podemos verificar que não se pode genericamente assumir que a resistividade é constante.
Para elementos de secção transversal circular (grande maioria), a variação relativa da área
está ligada a variação de diâmetro.
A ⋅d d 2 −d 2
=
2
A
⋅d
A d 22⋅d⋅ d d 2−d 2
=
A
d2
e considerando-se d 2 ≪2⋅d⋅ d
A 2⋅d⋅ d
=
2
A
d
A 2⋅ d
=
A
d
Por outro lado a variação relativa de diâmetro está relacionada com a variação relativa de
comprimento através de chamada razão de Poisson ( ). Para fluidos incompressíveis confinados
em tubo flexível uma variação incremental de comprimento é casada com uma variação
correspondente de diâmetro (proporcional a
d ) de modo a manter o volume constante. Neste caso
=0,5 . Em sólidos, no entanto, existe um substancial aumento no volume quando tensões
mecânicas são aplicadas, de tal modo que =0,3 . Então
d
L
=−⋅
, =0,3 ou =0,5 .
d
L
Medição de Fenômenos Biológicos – UFRJ, 2013/2
20
Logo, podemos escreve a variação relativa de resistência como
R L A
=
−
R
L
A
R L 2⋅ d
=
−
R
L
d
R L 2⋅⋅ L
=
−
R
L
L
R L
=
⋅12⋅
R
L
Definindo-se agora um fator de gauge (me) como
me=
R/ R
, temos que
L/ L
me=12⋅
/
L/L
Vários materiais podem ser usados para a confecção de strain gauge, sendo que os mais usuais estão
a seguir.
Material
Sensibilidade (S ou me)
Platinum (Pt 100%)
6,1
Platinum-Iridium (Pt 95%, Ir 5%)
5,1
Platinum-Tungsten (Pt 92%, W 8%)
4,0
Isoelastic (Fe 55.5%, Ni 36% Cr 8%, Mn 0.5%) *
3,6
Constantan / Advance / Copel (Ni 45%, Cu 55%) *
2,1
Nichrome V (Ni 80%, Cr 20%) *
2,1
Karma (Ni 74%, Cr 20%, Al 3%, Fe 3%) *
2,0
Armour D (Fe 70%, Cr 20%, Al 10%) *
2,0
Monel (Ni 67%, Cu 33%) *
1,9
Medição de Fenômenos Biológicos – UFRJ, 2013/2
21
Material
Sensibilidade (S ou me)
Manganin (Cu 84%, Mn 12%, Ni 4%) *
0,47
Nickel (Ni 100%)
-12,1
A tabela acima mostra que as variações de resistência R/ R são bastante pequenas. Normalmente
obtém-se somente alguns poucos milivolts na saída de um transdutor strain gauge. Variações maiores podem
ser obtidas com elementos como silício, que é um caso mais de piezo resistividade do que de variação de
resistividade.
A platina possui um relativamente grande R/ R e pode ser usada em ambientes corrosivos, mas
apresenta variações em função da temperatura que introduzem erros por vezes inaceitáveis. O seu valor de
me=6 deve-se majoritariamente a sua grande variação de resistividade. Uma vez que
=0,3
L
=4,4⋅
.
L
Para strain gauge feitos de mercúrio confinado em tubos flexíveis, o valor máximo de R/ R é
determinado majoritariamente pelo material do tubo (normalmente silicone). Para este material
≈0 e
=0,5 e consequentemente me=2.
Variações de temperatura representam uma fonte e erro ambiental expressiva nos
transdutores strain gauge. Tais erros são divididos em erros de sensibilidade e erros de offset. Os
erros de sensibilidade podem ser corrigidos através do uso de um termistor em série com a tensão
de excitação da ponte de Wheatstone. Na compensação de offset é necessário inicialmente
diferirmos os chamados strain gauge limitados e os não limitados. Os primeiros são dispositivos
montados em estruturas mecânicas que limitam deformação acima de um determinado valor. Já os
não limitados são aqueles onde a deformação pode ser qualquer, inclusive assumindo valores que
podem causar a destruição dos mesmos. Os tipos não limitados são, normalmente, mais lineares que
os limitados.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
22
4.5 Transdutores piezo resistivos
Os dois tipos de transdutores anteriormente discutidos, potenciométrico e strain gauge,
poderiam ser assim resumidos:
Medição de Fenômenos Biológicos – UFRJ, 2013/2
23
Potenciométrico: possui grande variação de saída, necessita de eletrônica simples (ou
nenhuma), mas apresenta complexidade mecânica e geralmente é ruidoso sob condições de vibração
mecânica.
Strain gauge: possui pequena variação de sinal de saída, usualmente precisa de eletrônica de
amplificação e ou condicionamento de sinal, normalmente é de construção ou montagem mais fácil,
é pequeno e possui bom desempenho em ambientes não favoráveis.
Os transdutores piezo resistivos representam uma tentativa de se combinar as melhores
características dos dois tipos anteriormente mencionados. São basicamente transdutores do tipo
strain gauge que apresentam grade variação de saída, requerem eletrônica de condicionamento
simples e é de fácil incorporação ao projeto “mecânico” do instrumento.
Normalmente pensamos na lei de Ohm na sua forma simples e escalar onde
macroscopicamente a tensão e a corrente se correlacionam como v=i⋅r . Porém, do ponto de vista
microscópio devemos relacionar o gradiente do potencial (ou campo elétrico) com a densidade de
corrente isto é
∇ V = E =J⋅
Onde a equação de antenas só estará correta se o meio for considerado isotrópico.
Para o caso de materiais formados por estruturas cristalinas, teríamos
E 1=11⋅J 112⋅J 213⋅J 3
E 2=21⋅J 1 22⋅J 223⋅J 3
E 3= 31⋅J 132⋅J 2 33⋅J 3
onde cada sobrescrito se refere a cada uma das direções ortogonais que definem o cristal.
O efeito piezo resistivo se refere a mudança de resistividade devido a tensão mecânica.
Logo, para o caso acima mencionado existirão, além das tensões lineares, tensão de rotação e de
Medição de Fenômenos Biológicos – UFRJ, 2013/2
24
cisalhamento que tornarão a análise bastante complexa. A despeito de tal fato ainda seria possível
definirmos um fator de gauge.
me=
/
L/ L
Para barras de silício tipo P com o eixo dominante na direção (1,1,1) teríamos, por exemplo,
me(1,1,1) da ordem de 100 a 175, sendo tal valor dependente de dopagem. Uma vez que um strain
gauge de fio possui, me entre 2 e 6, pode-se dizer que um strain gauge de silício é muito mais
sensível que este.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
25
5 Circuitos Comuns com Amplificador Operacional
5.1 Amplificador inversor
A Figura 5.1 mostra o circuito básico de um amplificador inversor a base de AO
(amplificador operacional).
Figura 5.1: Desenho básico de um amplificador inversor.
Se considerarmos o AO como ideal, o equacionamento do ganho fica muito facilitado pelo
uso de duas considerações:
1. A corrente que flui por R1 é a mesma que flui por R2 (a corrente de entrada do
amplificador operacional é zero);
2. O potencial na entrada negativa é igual ao potencial na entrada positiva (neste caso
igual a zero).
A solução para o problema é a equação 5.1.
Como i 1 =
v 0 =−
R2
R1
vi
v0
e i 1 =−
, então
R1
R2
vi
( 5.1 )
5.2 Amplificador não-inversor:
A Figura 5.2 mostra o desenho básico de um amplificador não inversor formado por AO.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
26
Figura 5.2: Desenho de um amplificador não inversor básico.
Supondo que o AO seja ideal, a solução do problema é encontrada fazendo-se a tensão na
entrada negativa (divisor de tensão formado por R1 e R2) igual a tensão de entrada vi. Neste caso a
equação 5.2 é a solução do problema.
R1
⋅v = v
R1 + R 2 0 i
v 0=
R1 +R 2
R
⋅v i=1 2 ⋅vi
R1
R1
v o R 1R2
R
=
=1 2
vi
R1
R1
( 5.2 )
5.3 Amplificador somador
A Figura 5.3 mostra a topologia do amplificador somador inversor básico implementado
com AO.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
27
Figura 5.3: Circuito do amplificador somador inversor básico.
Como podemos observar, o amplificador somador consistir de uma série de amplificadores
inversores ligados em paralelo. Isto nos leva a aplicar a técnica de superposição de fontes, para
equacionar a tensão de saída deste circuito. Aqui também levamos em conta que o AO possui
características ideais de funcionamento, assim, a saída será dada pela equação Error: Reference
source not found ou, no caso particular de todas as resistências serem iguais, pela equação Error:
Reference source not found.
i1=
v1
R1
, i2 =
v2
R2
, i3 =
v3
R4
, i 4=−
v0
R4
i1 + i 2 + i 3 = i 4
v 0 =- R4
v1
R1
v2
R2
v3
R3
( 5.3 )
se R1=R2=R3=R, então a equação Error: Reference source not found pode ser reescrita
conforme a equação Error: Reference source not found.
vO=
−R4
⋅ v1 v 2v 3
R
( 5.4 )
5.4 Amplificador subtrator
O amplificador subtrator (diferencial) básico é apresentados na Figura 5.4. A configuração
permite alterar o ganho do amplificador mas a impedância de entrada é baixa.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
28
Figura 5.4: Amplificador diferencial básico
Por superposição:
Para a entrada vcm e v2
v O = v CM v 2
R4
R R1
⋅ 2
R3 R4
R1
Para a entrada formada por vcm e v1
v O =−
R2
⋅ v v
R1 CM 1
Somando as duas equações, e após algum algebrismo
[
v 0=
]
R 1⋅R 4−R 2⋅R3
R2
R4 1 R2 / R1
⋅v CM − ⋅v 1 ⋅
⋅v
R1⋅ R3 R 4
R1
R3 1R 4 / R 3 2
Se
R2
R1
=
R3
R4
então
Medição de Fenômenos Biológicos – UFRJ, 2013/2
29
v 0=
R2
v −v .
R1 2 1
Observe que a influência de vcm é nula, se a razão entre as resistências R 2 e R1 for
exatamente igual a razão entre as resistências R3 e R4. Para calcular a CMRR do subtrator em
função da falta de casamento entre as resistências pode-se utilizar a equação 5.1 (Precision Matched
Resistors Automatically Improve Differential Amplifier CMRR – Here’s How, Linear Technology)
CMRR R
ONLY
≈
()
()
1
⋅(G +1)
2
( 5.1 )
1 ΔR
⋅
2 R
A Tabela 5.1 mostra como o CMRR do circuito pode mudar com relação a tolerância dos
resistores.
Tabela 5.1: CMRR do subtrator em função da tolerância dos resistores
Tolerância dos Resistores (%)
5
2
1
0,1
Acm subtrator (ganho 1)
0,1
0,04
0,02
0,002
CMRRsubtrator (ganho 1)
10x (20dB)
25x (27dB)
50x (33dB)
500x (54dB)
A CMRR do circuito completo, levando em conta a influência da CMRR do amplificador
pode ser obtida por
CMRR R
ONLY
≈
()
()
1
⋅(G +1)
2
1
1
1 ΔR
⋅(G+1)+
CMRR amp 2
2 R
()
( 5.2 )
Observe que a própria impedância da fonte pode causar um desbalanço nos resistores e
diminuir a CMRR da configuração. Por esta razão é desejável uma topologia onde a impedância de
entrada seja extremamente elevada. A construção integrada deste amplificador também minimiza os
erros entre as resistências e propicia um CMRR maior. Isto, entretanto, impede o ajuste do ganho
com a alteração de um único resistor. Exemplos destes circuitos integrados são o AMP03, o AD28,
AD629 da Analog Devices, e os INA149 e INA146 da Texas Instruments.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
30
5.5 Amplificador de instrumentação
Os amplificadores de instrumentação são circuitos que amplificam a diferença entre duas
tensões, mantendo uma elevada impedância de entrada, uma elevada rejeição a sinais de modo
comum e um ganho diferencial ajustável (preferencialmente), funcionando de forma similar ao
próprio AO, porém com ganhos menores. O circuito clássico para amplificador de instrumentação, e
que resolve todos os problemas apresentados é apresentado na Figura 5.5.
Figura 5.5: Amplificador de instrumentação com três operacionais.
O circuito pode ser resolvido por superposição:
Supondo v2 aterrada, o potencial na entrada negativa do AO de baixo é zero, logo
v O1=v 1⋅
RR3
R
v O2=−v 1⋅
R3
R
Supondo v1 aterrada, o potencial na entrada negativa do AO de cima é zero, logo
v O2=v 2⋅
RR3
R
Medição de Fenômenos Biológicos – UFRJ, 2013/2
31
v O1=−v 2⋅
R3
R
Como a saída do segundo estágio já foi calculada anteriormente e vale
v 0=
R2
R1
v 2−v1
então
vO =
v 0=
R 2 R2⋅R3
⋅
⋅ v 2−v 1
R1
R
R2
R1
1
2R 3
R
e 2 −e 1
Esta topologia apresenta alta rejeição a tensões de modo comum (se os R3 são diferentes, há
um erro no ganho mas não no CMRR), ganho elevado, ganho ajustável apenas com um resistor,
impedância de entrada (diferencial e de modo comum) elevada em ambas as entradas. Além disto se
o amplificador tiver ganho unitário, somente o offset dos amplificadores de entrada vão ser
significativos na determinação do offset de saída. Se os amplificadores de entrada forem iguais o
drift na saída do amplificador fica reduzido. Nesta configuração o primeiro estágio é responsável
pelo ganho e o segundo estágio é responsável pelo CMRR e para que este valor seja elevado o
amplificador de instrumentação é comercializado em um único integrado.
Circuitos integrados com amplificadores de instrumentação alcançam CMRR maiores do
que 100 dB ( CMRR > 105), mas este valor costuma decair com a frequência. Exemplos clássicos de
amplificadores de instrumentação integrado são o AD620, AD8221 da Analog Devices, o INA118 e
o INA103 da Texas Instruments.
5.6 Conversores Tensão Corrente
Conversores tensão corrente são muito úteis para a implementação de fontes de corrente
controladas por tensão. A topologia mais conhecida é a Howland, mostrada na Figura 5.6 e
discutida no artigo A Comprehensive Study of the Howland Current Pump da Texas Instruments.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
32
Observe que a principal característica destes circuitos conversores tensão corrente, ou fontes de
corrente, é que a corrente sobre a carga não depende da carga.
Figura 5.6: Conversor Tensão-Corrente tipo Howland
No circuito da esquerda, se retirarmos o resistor R, conectado a entrada vin, e o resistor RL,
o equivalente Thévenin do circuito restante resulta em uma resistência negativa de valor -R.
Substituindo o circuito pelo seu equivalente e a fonte vin em série com R pelo seu equivalente
Norton, é fácil perceber que a corrente na carga, de cima para baixo, é igual a
i RL=
vin
R
Para o circuito da direita a corrente na carga, de cima para baixo, é igual a
i RL=−
vin
R
Medição de Fenômenos Biológicos – UFRJ, 2013/2
33
6 Circuitos Condicionadores em Ponte de Wheatstone
Vários transdutores como os RTDs e os strain gages apresentam pequenas variações de
resistência com relação a variável de interesse, e normalmente são utilizados em uma montagem
chamada ponte de Wheatstone (criada por S. H. Christie em 1883 e aprimorada por C Wheatstone
em 1843). Os sensores são colocados nos braços da ponte, que pode ser alimentada com fonte de
tensão ou corrente conforme indicado na figura abaixo. Na ponte, uma ou mais impedâncias mudam
seu valor proporcionalmente a grandeza que se deseja medir. Isto provoca um desequilíbrio nas
tensões da ponte que pode ser detectado por um amplificador. Eventualmente este amplificador
também pode ser responsável por linearizar ou filtrar o sinal captado da ponte.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
34
Apesar das duas formas serem possíveis a mais comum é aquela com alimentação em
tensão. Nela, considerando que Av é o ganho do amplificador e Vcc é o valor da fonte de
alimentação, a tensão na saída do amplificador será
(
v 0 = Av⋅Vcc⋅
)
R2
R3
−
,
R 1 + R2 R 3 +R4
enquanto que, para o circuito alimentado com fonte de corrente, o sinal na saída do
amplificador é dado por
R3 R4
R1 R 2
v O =Av⋅I⋅ R2⋅
−R3⋅
.
R 1R 2R 3R 4
R1 R2 R3 R 4
Em ambos os casos o amplificador foi considerado ideal, ou seja, com impedância de
entrada infinita. Isto nem sempre é verdade, e, assim como no caso apresentado para o circuito com
potenciômetro, se a impedância de entrada do amplificador não for infinita um erro sistemático será
adicionado a saída do circuito. A análise completa do problema, considerando a impedância de
entrada do amplificador, pode ser feita por meio de equivalentes Thévenin vistos a partir de cada
entrada do amplificador. Este foi o procedimento adotado abaixo para o caso da alimentação em
tensão mas pode ser facilmente estendido para o caso da alimentação em corrente.
Z3
v TH1=v⋅
Z 3Z 4
Medição de Fenômenos Biológicos – UFRJ, 2013/2
35
Z TH1 =
Z 3⋅Z 4
Z 3Z 4
v TH2 =v⋅
Z TH2 =
Z2
Z 1Z 2
Z 1⋅Z 2
Z 1Z 2
v TH =v TH1 −v TH2=v⋅
Z3
Z2
−
Z 3Z 4 Z 1Z 2
Z 3⋅Z 4
Z ⋅Z
1 2
Z 3Z 4 Z 1 Z 2
Z TH =Z TH1Z TH2 =
Com as equações apresentadas fica evidente que a relação entre a tensão de saída da ponte e
a variação de resistência dos elementos sensores pode ser bastante complexa. Um caso de interesse
existe quando todos os elementos da ponte são resistivos e iguais e uma certa variação
(desbalanceamento) ocorre em apenas um dos braços, digamos o braço 4. Neste caso
Z 1=Z 2=Z 3=R e Z 4=R⋅1 .
Assim a tensão de Thévenin pode ser simplificada
R
R
−
RR⋅1 RR
1
1
−
2 2
v TH =v⋅
v TH =v⋅
Medição de Fenômenos Biológicos – UFRJ, 2013/2
36
v TH =v⋅
−
2⋅2
assumindo pequenas variações de resistência, isto é, pequeno ( ≪2 )
v TH =−v⋅ .
4
A resistência de Thévenin também pode ser recalculada como sendo
RTH =
R⋅R⋅1
R⋅R
RR R R⋅1
RTH =
R R⋅1
2
2
RTH =R⋅
1 1
.
2 2
Assumindo muito pequeno (muito menor do que 1)
RTH =R
Observe que tanto a tensão quanto a resistência de Thévenin variam em função das
variações de Z4, e que RTH é aproximadamente igual as resistências empregadas na ponte. Isto quer
dizer que o uso de sensores com impedância baixa é desejado, pois os erros relativos oriundos
destas variações e da impedância de entrada do amplificador serão baixos.
Outro caso de interesse ocorre quando existe um desbalanceamento igual e oposto em
braços laterais tal que Z 1=Z 2=R , Z 3= R⋅1− e Z 4=R⋅1 .
Neste caso teremos
[
v TH =v⋅
R⋅1−
R
−
R⋅1−R⋅1 RR
]
Medição de Fenômenos Biológicos – UFRJ, 2013/2
37
[
v TH =v⋅
1− 1
−
2
2
]
v TH =−v⋅ , e
2
RTH =
R⋅1−⋅R⋅1
R⋅R
RR R⋅1−R⋅1
RTH =
R R⋅1−⋅1
.
2
2
Assumindo muito pequeno (muito menor do que 1)
RTH =R
Neste caso, a tensão de saída da ponte é linear sem nenhuma aproximação nem restrição às
variações de resistência dos sensores. Apesar disto RTH ainda varia com a entrada. Várias outras
condições levam à VTH lineares seja com alimentação em tensão ou corrente. Convém notar,
entretanto, que resistências que variam da mesma forma devem ser colocadas em diagonal na ponte,
e resistências que variam de forma oposta devem ocupar posições em um mesmo braço.
As montagens de ponte mais comuns são aqueles onde apenas 1 elemento sensor está
presente na ponte (condição não linear), ou 2 elementos sensores estão presentes em um mesmo
braço da ponte (situação comum em medidores de pressão ou fluxo) ou todos os elementos da ponte
variam (este é quase um padrão industrial, sendo o tipo mais comum para células de carga). Para o
caso de dois elementos variando em um mesmo braço da ponte a saída não será linear se a ponte for
alimentada com tensão (terá a mesma não linearidade do caso com 1 sensor e o dobro da
sensibilidade).
A alimentação em corrente também apresenta um caso não linear, onde apenas uma
resistência da ponte varia. Mesmo nesta situação este tipo de alimentação pode ser vantajosa em
casos de alimentação remota, pois sofre menos influência da resistência dos fios e, portanto,
favorece o uso de cabos mais baratos e com menos fios (como será visto mais adiantes) além de ser
mais imune a interferências externas.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
38
6.1.1 Medições de resistência em ponte de Wheatstone
Para entender o problema da medida de resistência pode se utilizar um exemplo numérico. O
RTD mais comum é o PT 100, um sensor de platina com resistência de 100Ω. Ele tem coeficiente
térmico (TC) aproximado de 0,385%/oC. Então para medir 1oC é necessário discriminar variações
de resistência de 0,385Ω. Outro exemplo são os strain gauges, eles podem variar 1% de seu valor
para o fundo de escala. Isto pode significar variação máxima de 3,5Ω numa medida de força. Para
medidas com resolução de 10 bits seria necessário detectar variações de resistência de
aproximadamente 0,0035Ω. Normalmente variações de resistência desta ordem de grandeza são
medidas com o uso de uma ponte de Wheatstone. A saída da ponte é de alguns mV quando a
alimentação é da ordem de 10V. Isto leva a sensibilidades de 1mV/V até 10mV/V.
Mesmo com a sensibilidade das pontes dependendo da tensão de alimentação esta não pode
ser aumentada indistintamente, pois leva a aquecimento dos sensores, e se este problema for
diminuído ao máximo, com a redução dos valores para fonte, a sensibilidade também fica muito
diminuída. Além disto fontes de alimentação para a ponte devem ser muito estáveis, pois variações
na tensão de alimentação produzem variação na sensibilidade da ponte. Para resolver este problema
pode se utilizar fontes de referência para alimentar as pontes. Existem fontes de referência muito
mais precisas do que as fontes de alimentação como por exemplo o AD589 (1,2%), o REF195
(0,2%) e o AD588 (0,01%) da Analog Devices. Uma alternativa para o uso de fontes de referência é
a medida na qual a tensão da fonte de alimentação é utilizada para corrigir o ganho do canal de
medição. Na figura abaixo a fonte de alimentação da ponte é usada como referência para o máximo
valor de conversão do ADC. Com este arranjo o conversor se adapta as variações da fonte
produzindo uma medida menos sensível as variações da fonte.
Com relação ao amplificador, normalmente utiliza-se o amplificador de instrumentação, seja
ele com dois ou três amplificadores operacionais. O amplificador de instrumentação apresenta
Medição de Fenômenos Biológicos – UFRJ, 2013/2
39
elevada impedância de entrada, elevado CMRR (anula a tensão de modo comum da ponte) e, de
preferência baixo ruído, offset e drift.
Apesar de todos estes cuidados o circuito acima continua sendo não linear, pois a ponte com
apenas um elemento variando (comum com RTD) não é linear. Neste caso
Vcc
Δ R/ R
v O =Av⋅ ⋅
4 1+Δ R/2R
(
)
o que significa que, para Vcc=10V, R=100Ω, ∆R=0,1% (0,1Ω) a tensão de saída da ponte
será Vo=2,49875mV. Isto nos leva a um erro de
Erro=
2,500000−2,49875
=0,05 % .
2,500000
Caso ∆R=1% (1,0Ω) a tensão de saída da ponte será Vo=24,8756mV. Isto nos leva a um
erro de
Erro=
25,00000−24,8756
=0,5 % .
25,00000
Assim sendo se percebe que a ponte apresenta uma linearidade de ∆R/2, independente do
sensor colocado nela ser ou não linear. O problema da linearidade deve, então, ser resolvido de
outra forma. Para linearizar esta ponte podem ser utilizados alguns circuitos com amplificadores
operacionais, tomando cuidado para que estes AOs sejam escolhidos em função do seu alto ganho,
Medição de Fenômenos Biológicos – UFRJ, 2013/2
40
baixo offset, baixo ruído e alta estabilidade térmica. Amplificadores como os AD708, OP2177,
OP213 e INA333 podem ser utilizados para esta função. Nas figuras abaixo todas as montagens
apresentam saída linear mesmo quando apenas um elemento da ponte varia.
V o=
v 0=
( )
VB Δ R
R
⋅ ⋅ 1+ 1
2 R
R2
Vcc
⋅Δ R
R
Medição de Fenômenos Biológicos – UFRJ, 2013/2
41
Se R6 =
Av⋅R 5
2
Vcc Δ R
⋅
4 R
então v O =Av⋅
Os circuitos a seguir também podem ser utilizados para linearizar pontes com um ou dois
elementos variando, conforme indicado, e alimentação em fonte de tensão. A desvantagem destes
circuitos é que as pontes precisam ser abertas, o que nem sempre é possível, pois algumas vezes a
ponte é comprada lacrada. A saída de cada uma das pontes será
( )
ΔR
2⋅R
para um elemento variando e
ΔR
R
para dois elementos variando.
V o =−V B⋅
( )
V o =−V B⋅
Medição de Fenômenos Biológicos – UFRJ, 2013/2
42
6.1.2 Instrumentação para medidas remotas
Para medidas remotas, onde a ponte é colada distante do circuito de excitação e captação, é
possível empregar técnicas que compensam os erros introduzidos pelos longos fios. Os métodos
mais conhecidos são os de extensões de três fios para a interconexão de um único elemento que
varia ou de seis fios para interconectar toda a ponte.
O esquema da figura abaixo ilustra o problema. Neste exemplo o elemento sensor esta
distante 30 metros do resto da ponte a qual ele está interconectado e a interconexão é feita por fios
AWG 30, de cobre, com um total de Rfio=10,5Ω @ 25oC e TC=0,385%/oC. A resistência dos fios
tira a ponte do equilíbrio, o que pode ser compensado com uma resistência Rcor=21Ω. Entretanto
variações de temperatura levam novamente a ponte ao desequilíbrio.
Supondo VB=10V, R=350Ω, ∆R=1% para o fundo de escala, e Rfio=10,904Ω @ 35oC,
então a saída da ponte varia de acordo com as equações abaixo.
V o =0 – 23,45 mV @ 25 o C e
V o =5,44 – 28,83 mV @ 35 o C .
Isto significa um erro de offset de +23% FS (5,44/23,45) e um erro de linearidade de -0,26%
FS ((28,83-5,44)/23,45). A correção para este problema pode ser feita não com o resistor de
correção (Rcor) mas com três fios que levam ao sensor (figura abaixo). Supondo as mesmas
condições do problema anterior, então a saída da ponte pode ser calculada como
Medição de Fenômenos Biológicos – UFRJ, 2013/2
43
V o =0 – 24,15 mV @ 25 o C e
V o =0 – 24,13 mV @ 35 o C .
Observa-se agora, um erro de offset nulo e um erro de sensibilidade de apenas 0,08% FS.
Isto ocorre pois a ponte ficou balanceada com a resistência dos fios que levam ao sensor e que
variam com a temperatura, mantendo a ponte permanentemente em equilíbrio.
Caso toda aponte esteja distante pode se adotar o uso de seis fios para interconectá-la. Neste
caso o maior problema é manter a alimentação da ponte o mais constante possível. A resistência dos
fios, entretanto, varia com a temperatura, o que se traduz em variações na tensão de alimentação da
ponte. O circuito apresentado na figura abaixo mostra como a alimentação sobre a ponte pode ser
mantida constante independente da impedância dos fios. Este sistema de medida com seis fios é,
algumas vezes, chamado de Kelvin. Apesar do efeito dos fios ter sido removido ainda é importante
manter a estabilidade da fonte de alimentação da ponte. A outra forma de evitar problemas com os
longos fios de interconexão é utilizar fonte de corrente para a alimentação da ponte. Em qualquer
um dos casos é importante atentar para a corrente de saída requerida para os amplificadores
operacionais. Com alimentação de 10V e resistências de 350Ω a corrente na saída dos operacionais
é da ordem de 30mA.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
44
6.1.3 Problemas com offset
Outro problema que deve ser evitado é o do efeito termopar (diferença de tensão que surge
quando dois metais diferentes são unidos e mantidos em temperaturas diferentes) entre os fios que
conectam a ponte aos circuitos de captação de sinais. Para manter uma exatidão de 0,1%, ou
melhor, em uma ponte onde a saída máxima é de 20mV os erros devem ser menores do que 20µV
no offset.
O efeito de termopar entre fios de diferentes materiais como a solda e o cobre
(aproximadamente 2µV/oC) ou Kovar (material utilizado em alguns terminais de circuitos
integrados) e o cobre (aproximadamente 35µV/oC) ou entre cobre e terminais de borneiras,
conectores, chaves... Este problema só pode ser evitado mantendo as conexões que formam os
termopares na mesma temperatura, o que significa conexões próximas e sem barreiras entre elas.
Para minimizar problemas com offset e drift a escolha do amplificador de instrumentação
adequado pode ajudar. Os operacionais OP177 e OP1177 apresentam baixo offset, drift, IB e ruído.
Alternativamente podem ser empregados integrados com arquitetura chopper estabilizadas como o
ADA4528, o AD8629 ou o AD8630, OPA335 e INA326. Também podem ser empregadas
excitações alternadas com ondas quadradas ou senoidais. A excitação com onda quadrada pode ser
vista nas próximas figuras. Na primeira a fonte E OS representa o offset do amplificador e não é
afetado pela inversão da fonte. O tratamento matemático pode ser feito com amostradores
Medição de Fenômenos Biológicos – UFRJ, 2013/2
45
analógicos e subtratores ou digitalmente após a conversão de um AD. A segunda figura mostra uma
forma prática de inverter a polaridade na tensão de alimentação da ponte. Esta inversão de
polaridade pode ser feita por uma ponte H (um DRV8832 por exemplo) ou por circuitos
especialmente desenvolvidos para este condicionamento como o AD7730.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
46
O AD7730 está preparado entre outras coisas para medidas com seis fios e apresenta
internamente circuitos digitais para compensação de offset e conversão AD. Seu uso não é simples e
requer programação feita por uma interface SPI.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
47
Outros integrados também podem ser utilizados para o condicionamento de sinais como o
PGA309 mostrado na figura abaixo.
Para excitação senoidal é possível utilizar circuitos com demoduladores integrados como o
AD698 e o AD598 que também são usados para medidas com LVDT.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
48
6.1.4 Problemas com a temperatura
Variações de temperatura tendem a desequilibrar a ponte caso as suas resistências
apresentem diferentes coeficientes térmicos ou estejam sujeitas a diferentes temperaturas. A forma
mais simples de compensar este erro é fazendo com que as resistências de um mesmo braço sejam
iguais. Isto requer o uso de, pelo menos, dois sensores, nem que um deles seja empregado apenas
para estabilizar termicamente a ponte. Alternativamente sensores como RTDs ou termistores
poderiam ser empregados para a compensação mas a compensação costuma ser mais difícil e ficar
restrita a uma faixa menor de temperatura.
Medição de Fenômenos Biológicos – UFRJ, 2013/2
49


![avc dia 31 de outubro[1]](http://s1.studylibpt.com/store/data/004402075_1-5bade71e2cf826c01afca0c710ebd5c6-300x300.png)