Edição 21, volume 1, artigo nº 9, Abril/Junho 2012
D.O.I: http://dx.doi.org/10.6020/1679-9844/2109
DESENVOLVIMENTO DE UM SISTEMA DE CONTROLE
NEURAL PARA AUTÓMATOS MÓVEIS
Annabell Del Real Tamariz1, Francisco Alves de Freitas Neto2, Fermin Alfredo
Tang Montané3
1
Universidade Estadual do Norte Fluminense Laboratório de Ciências Matemáticas/Centro de
Ciência e Tecnologia, Campos dos Goytacazes, Rio de Janeiro, Brasil, annabell;[email protected].
2
3
Instituto Federal de Educação, Ciência e Tecnologia Fluminense - Campus Bom Jesus do
Itabapoana, Rio de Janeiro, Brasil,: [email protected]
Universidade Estadual do Norte Fluminense Laboratório de Ciências Matemáticas/Centro de
Ciência e Tecnologia, Campos dos Goytacazes, Rio de Janeiro, Brasil, [email protected]
Resumo – Este artigo apresenta um trabalho de pesquisa na área de
controle, onde foi desenvolvido um sistema de controle inteligente com uma
arquitetura híbrida, implementado num robô-autômato móvel, para tomada
de decisão em otimização de rotas e deslocamento, utilizando Redes
Neurais Artificiais do tipo Hopfield. Sua relevância se deve a vocação que
as Redes Neurais, em especial as recorrentes, possuem ao tratar processos
de otimização em poucos ciclos computacionais e a sua simplicidade para a
implementação em hardware, o que justifica a sua utilização em robôsautômatos móveis. Finalmente serão apresentados os resultados
experimentais obtidos descrevendo o sucesso do controle do robô e da
qualidade de suas decisões durante o percurso de deslocamento.
Palavras-chave: Robótica Móvel, Redes Neurais Artificiais Hopfield,
Sistema de Controle, Arquitetura Híbrida.
Abstract – This paper presents a research work in the control area, we
developed an intelligent control system with hybrid architecture,
implemented in a mobile automaton-robot, for decision-making in route and
movement optimization, using Hopfield´s Artificial Neural Networks. Its
relevance is due to the vocation of Neural Networks, in particular the
recurrents, to deal with optimization processes in a few computational cycles
and its simplicity for hardware implementation, which justifies its use in
mobile automaton-robots. Finally we present the experimental results
obtained describing the successful control of the robot and the quality of its
decisions during the course of its movements.
KeyWords: Mobile Robotics, Hopfield Artificial Neural Networks, Control
System, Hybrid architecture.
www.interscienceplace.org - Página 160 de 196
1. Introdução
Uma das questões mais caras à imaginação inventiva do ser humano é a exploração
dos limites homem-máquina e máquina-homem. No centro desta questão se
encontram a proposta da inteligência artificial (IA), as questões da robótica e o mito
do androide, problemáticas estas prefiguradas desde a antiguidade pelo mito do
autômato (vide a Ilíada de Homero). Com o rápido desenvolvimento da tecnologia na
modernidade este se apresenta sobre o aspecto da complexidade da robótica. O
nome robô vem do tcheco robota, significando, trabalho forçado, ou escravo. A
robótica é a área dedicada ao desenvolvimento de dispositivos que realizam tarefas
onde a presença humana se torna difícil, arriscada e até mesmo impossível. A
robótica móvel corresponde à linha de pesquisa que se concentra no estudo da
forma de locomoção de veículos autônomos e semiautônomos.
O conceito de robôs autônomos ou semiautônomos implica que tais
dispositivos apresentem capacidade de operar no mundo real com certo um nível de
independência. Os robôs devem possuir características tais como: poder de decisão,
capacidade de se adaptar a mudanças de ambiente, e capacidade de aprendizagem
a partir da experiência. As técnicas de IA são utilizadas com essa finalidade,
destacando-se em particular as técnicas de controle inteligente conhecidas como
Redes Neurais Artificiais (RNAs) e Lógica Nebulosa.
O Brasil apresenta alguns estudos (MEZENCIO, 2002; VASCONCELOS, 2007;
DE LA ROCA, 2008) referentes a novas técnicas na área de robótica. É pertinente
afirmar que essa área deve ser tratada como estratégica no domínio tecnológico
pretendido por qualquer país atualmente. As áreas de utilização dessa tecnologia se
estendem desde nanotecnologia até aplicações para otimização de colheitas e
plantações. Carros autoguiados, aviões automáticos, mini-robôs exploradores, nanorobôs para tratamento de doenças, robôs para conserto de dutos, assim como para
avaliação e reparo de estruturas variáveis, são alguns exemplos de aplicação.
Um número maior de universidades e centros de pesquisas nacionais aposta
no incentivo estratégico dessa área como forma de aquisição tecnológica. Tais
www.interscienceplace.org - Página 161 de 196
incentivos são objetivados com base em duas perspectivas. A primeira é alavancar e
suportar o crescimento do parque produtivo brasileiro nos anos vindouros, aonde o
ambiente competitivo força a reformulação de antigas técnicas de produção em
detrimento a técnicas mais modernas, e a segunda é a inserção de novos modelos
de ações em áreas que a presença humana se torna uma agressão ao conceito de
preservação da vida.
Apesar do aumento de incentivos, o Brasil ainda se apresenta em um estágio
bastante atrasado em comparação com seus parceiros desenvolvidos, suscitando a
premente necessidade de ampliar os esforços para a aquisição de tais
conhecimentos.
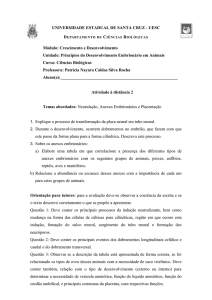
Este trabalho apresenta os resultados de um sistema de controle inteligente
híbrido para um autômato móvel construí-do para atuar sobre uma plataforma plana
simulando um ambiente controlado de deslocamento. Para este experimento,
utilizou-se uma plataforma composta por uma matriz de pontos (vide Figura 1), onde
alguns destes pontos são selecionados para caracterizar objetivos de deslocamento
do autômato. Como restrição, o robô somente pode se deslocar sobre as trilhas que
unem os pontos, desta forma foi possível simular um ambiente de caminhos que se
interconectam.
Figura 1: Representação da Matriz de Pontos
A relevância desta pesquisa reside na capacidade de criarem-se autômatos
móveis para tarefas gerais em ambientes pré-formatados. Dentre as possíveis
aplicações futuras desta pesquisa, pode-se destacar: O deslocamento de robôs de
transporte em autovias, robôs de limpeza de oleodutos, controle automático de
tráfego de trens, ou qualquer outra atividade onde se necessitem de robôs
www.interscienceplace.org - Página 162 de 196
autômatos capazes de se deslocar de forma otimizada em ambientes de
deslocamento pré-definidos (ARAÚJO, 2006; FIGUEIREDO, 2004).
2. ARQUITETURA DO ROBÔ
O sistema de controle inteligente, desenvolvido no presente trabalho, possui uma
arquitetura híbrida, constituída pela união de dois componentes fundamentais: o
componente Deliberativo ou Hierárquico (BOTELHO, 2003), e o componente de
Subsunção ou Reativo (BROOKS, 1986; NILSSON, 1969). No protótipo proposto, o
componente deliberativo é do tipo não embarcado enquanto o componente reativo
encontra-se lotado em um microcontrolador embutido no próprio robô. O
componente deliberativo analisa o ambiente e define as ações a serem
desenvolvidas pelo robô; já o componente reativo toma conta da execução dessas
ações tomando decisões de mais baixo nível, como manter a rota escolhida e
preservação do autômato.
A arquitetura híbrida adotada encontra-se representada na Figura 2. Observase que existem dois componentes principais: Hierárquico e Reativo, cujo
funcionamento e interação serão descrito em detalhes.
Figura 2: Representação da arquitetura de Controle Híbrida
www.interscienceplace.org - Página 163 de 196
Com base na Figura 2, observa-se o sistema de controle se inicia na camada
Planejador da Missão, onde existe uma representação do ambiente e permite-se a
interação com o usuário para a definição das metas e as restrições que robô deverá
atender durante o processo de deslocamento. Em seguida, o Raciocinador
Espacial define a rota a ser percorrida com base na otimização do gasto energético
de deslocamento. A rota otimizada é enviada ao Sequenciador de Plano, que cria a
sequência de ações que será executada e envia essa sequência à componente
reativa. Neste ponto o Controlador de Esquemas monitora os comportamentos do
robô, através de uma biblioteca comportamental pré-definida, em função das
instruções deliberativas e do quadro de instância apresentado pelos seus sensores.
O módulo reativo deve responder da melhor forma possível, caso ocorra
impedimento de execução da instrução deliberativa, garantindo assim a integridade
do sistema e impedindo que a persistência do erro acarrete na impossibilidade da
execução da missão designada.
Esta característica híbrida de modelo de arquitetura, ficou comumente
conhecida como arquitetura AuRA (PIERI, 2002), e pode ser considerada como um
planejador altamente modular. As partes envolvidas deste planejamento podem ser
prontamente substituídas por outras sem o comprometimento do sistema de controle
geral. É importante ressaltar que este paradigma apresenta dois conceitos
fundamentais da automação móvel: A Deliberação (NILSSON, 1969) e a Reação
(BROOKS, 1986).
3. TRATAMENTO NEURAL PARA A RESOLUÇÃO DE ROTAS
Nesta seção descrevem-se as características do ambiente de deslocamento adotado
para os experimentos de controle inteligente do autômato móvel, assim como a
representação do problema de cálculo de rotas ótimas mediante redes neurais.
Considera-se que o autômato móvel precisa deslocar-se a partir de uma base
visitando um conjunto de pontos pré-definidos e retornando a base no final do
percurso. O ambiente no qual o autômato pode-se deslocar é pré-formatado,
semelhante a uma matriz de pontos, na qual somente são possíveis movimentos na
horizontal ou na vertical. A Figura 3(a) mostra a representação de um ambiente de
www.interscienceplace.org - Página 164 de 196
deslocamento para o robô com 20 pontos de deslocamento. No exemplo, o robô tem
como base o ponto 11 e como objetivo a visita de 3 pontos pré-definidos, pontos 6,
13, 18. Observa-se que existem diferentes deslocamentos possíveis entre cada par
de pontos, por exemplo, na Figura 3(a), as rotas 11-7-3-2-6 e 11-7-6 são rotas
alternativas. Deve-se escolher um caminho com o menor custo em centímetros, ou
seja, menor distancia total percorrida. A distância entre cada par de pontos na grade
de deslocamento é conhecida, o que permite calcular o conjunto rotas, com menor
custo, entre os pontos pré-definidos (inclusive a base) (ver Figura 3(b)).
1
2
3
4
1
2
5
6
7
8
5
6
10
11
12
9
4
7
70cm
105cm
9
3
10
8
105cm
11
12
15
16
105cm
13
14
15
16
13
14
105cm
70cm
17
18
19
20
17
(a)
18
19
20
(b)
i
Ponto da matriz de deslocamentos
j
Ponto de Partida/Chegada
k
Ponto de Visita
Figura 3: Exemplo de um ambiente de deslocamento para o robô
Para solucionar este problema combinatório, foi adotado um tratamento
neural recorrente, conhecido como RNA- Holpfield (HAYKIN, 1994), vide Figura 4.
www.interscienceplace.org - Página 165 de 196
Figura 4: Representação de uma Rede Neural Hopfield
Na rede neural, utiliza-se um neurônio para cada ponto de visita pré-definido na
grade, enquanto que os pesos de cada neurônio serão calculados com base na
teoria descrita posteriormente.
No modelo neural da Figura 4, a saída yi, de cada neurônio, aqui representado
por círculos, está ligada ás entradas de todos os demais, e se esta ligação for
simétrica, isto é, se os pesos do neurônio i ao neurônio j fossem iguais aos pesos do
neurônio j ao neurônio i, leia-se wij= wji, sendo i, j = 1, ... ,N, onde N é o numero de
neurônios da rede, temos uma RN Hopfield que converge a uma estabilidade
garantida (HOPFIELD, 1985). Portanto, pode-se concluir que as redes neurais
Hopfield trabalham com pesos de conexões previamente estabelecidos, que estão
diretamente relacionados com a aplicação envolvida. Este estabelecimento de pesos
é confirmado, pois segundo (HAYKIN, 1994), este modelo não apresenta uma fase
de treinamento supervisionado.
Esta construção levanta algumas questões, pois este modelo altamente
recorrente determina que qualquer alteração em uma das saídas repercute-se nas
entradas dos demais neurônios. Podemos concluir que a evolução deste quadro
pode acarretar a duas questões definitivas: ou a rede encontra um estado de
equilíbrio ou diverge de forma indefinida. Caso esta última situação ocorra, este
modelo neural será de pouca utilidade.
www.interscienceplace.org - Página 166 de 196
4. REDES HOPFIELD CONTÍNUAS
As Redes Neurais Hopfield (RN Hopfield) quando comparadas com as Redes
Binárias, apresentam uma sensível diferença por tratar-se de uma ativação não
discreta (sigmóide). Por esta razão, os valores de saída não apresentam resultados
discretos, mas sim uma variação contínua entre 0 e 1. Em termos práticos, as
aplicações das Redes Contínuas são diferentes das Discretas. Enquanto as
discretas têm a função de endereçamento de memória baseado no conteúdo, as
contínuas são basicamente utilizadas para a resolução de problemas de otimização
combinatória. O fator que leva ao seu uso para esta finalidade está no alto grau de
paralelismo inerente desta estrutura. Isto permite um alto desempenho quando
comparados com algoritmos sequenciais (HOPFIELD, 1982).
Em (HOPFIELD, 1985), define-se uma RN Hopfield Contínua como se fosse
um sistema de equações diferenciais não lineares. A progressão dos cálculos
envolvidos resulta em uma equação energética (vide Equação 1) do sistema a ser
minimizada ao longo das iterações:
xj
N
N
1 N N
1
1
E ji xi x j
(
x
)
dx
I jxj
j
2 i 1 j 1
j 1 R j 0
j 1
(1)
Hopfield e Tank demonstraram que este sistema neural sempre converge
desde que sejam respeitadas as condições iniciais descritas anteriormente,
independentemente dos valores iniciais propostos. Porem não existe garantias de
que o valor otimizado obtido corresponda ao mínimo global, normalmente o que se
obtém são mínimos locais que dependem dos valores iniciais. No mesmo artigo,
ainda demonstrou-se, que um modelo bem equacionado sempre apresentará um
mínimo global dentre os muitos mínimos locais alcançados (HOPFIELD, 1985).
A grande questão, e um dos principais problemas desenvolvidos neste
trabalho, é a determinação dos pesos neurais para efetuar os cálculos de
otimização. Enquanto nos processos de reconhecimento de padrões os pontos de
estabilidade são coincidentes com os próprios padrões que determinam os pesos de
conexões, a otimização necessita determinar estes valores sem conhecer o destino
da convergência, pois este é o próprio valor buscado (valor ótimo). A falta de um
método rigoroso faz com que sejam utilizados recursos heurísticos ou até mesmo
www.interscienceplace.org - Página 167 de 196
estocásticos para esta determinação. Apesar das dificuldades, Redes Neurais
altamente
recorrentes
são
capazes
de
otimizar
problemas
combinatórios
(HOPFIELD, 1985). Em particular, o uso de RN Hopfield Contínuas tem sido
utilizada com grande sucesso devido à qualidade de suas respostas e
principalmente devido a sua velocidade de convergência (HAYKIN, 1994). De fato,
qualquer função objetiva quadrática pode ser reescrita de acordo com a equação
energética da rede neural Hopfield, Equação1.
5. METODOLOGIA
Para solução deste problema utilizando uma RN Hopfield, as unidades neurais foram
organizadas em uma matriz bidimensional de n x n, onde n corresponde ao número
de pontos a serem visitados pelo robô móvel. A representação da rede neural
adotada no caso de estudo é mostrada na Figura 5. No exemplo da Figura,
destacam-se em azul as entradas do neurônio Xi. Mostra-se em vermelho a
retroalimentação, em particular a sinapse entre o neurônio Xi e Yj.
y11
y12
yXi
wXi,Yj
yYj
y44
Figura 5 Representação Rede Neural Adotada
A Tabela 1 ilustra com um exemplo a representação de uma saída neural no
caso de n=4 pontos de visitação. Cada linha da matriz representa um ponto
selecionado a ser visitado e cada coluna representa a ordem de visitação de cada
ponto.
www.interscienceplace.org - Página 168 de 196
Ponto
1°
1
*
2
2°
3°
4°
*
3
*
4
*
Tabela 1: Representação de uma saída neural otimizada
Portanto para que a solução neural seja útil é necessário que sua saída
corresponda a uma matriz onde só ocorra ativação neural em um neurônio de cada
linha, (cada ponto só pode ser visitado uma vez), e um neurônio por coluna, (só
pode haver um ponto visitado por vez). Assim a ativação de um neurônio da linha x
na j-ésima coluna, corresponde à visitação deste ponto x após j-1 pontos serem
visitados.
Podemos generalizar o problema de determinar o percurso de menor custo
afirmando que é equivalente à minimização das distâncias entre os pontos. Com
base nesta afirmação, adota-se a função de pesos proposta por Hopfield e Tank
(HOPFIELD, 1985), para calcular os pesos de conexão entre os neurônios.
A
(
1
)
B
(
1
)
C
Dd
(
)
1
se
i
j
onde
:
0
se
i
j
Xi
,
Yj
XY
ij
ij
XY
XY
j
,
i
1 j
,
i
1
(2)
ij
Na equação 2, XiYj, corresponde ao peso da sinapse do neurônio da linha Y,
coluna j para o neurônio da linha X com a coluna i. O símbolo ij, representa a
função de Kronecker (MACHADO, 1999). O símbolo dXY representa a distância entre
os pontos Y e X. Os valores A, B, C e D são constantes positivas usados como
parâmetros para ajustar a rede. Observa-se que algumas componentes da equação
(2), serão eliminadas caso referenciem neurônios na mesma linha ou coluna.
Vale observar que existe outro caminho equivalente obtido ao percorrer o
caminho resultante no sentido inverso, porem, este caminho será desconsiderado, já
que implica em cálculos desnecessários.
Se o cálculo for bem sucedido a rede deverá convergir para um resultado final
onde só existirá uma linha ativada e apenas uma coluna ativada para cada solução
neural, representando assim uma solução viável para o problema combinatório. Se
www.interscienceplace.org - Página 169 de 196
ainda, os ajustes dos parâmetros A, B, C, e D, estiverem corretos a saída deverá
representar uma solução heurística de boa qualidade próxima do percurso de custo
mínimo entre os pontos considerados.
O maior desafio no uso de otimização combinatória com Redes Neurais
Recorrentes é a determinação dos parâmetros A, B, C, e D da equação dos pesos
neurais desenvolvida por Hopfield e Tank, vide Equação (2). Para a determinação
destas constantes, aplicou-se um método empírico, pois apesar do esforço de
Matsuda (KONISHI, 2001), de encontrar um modelo formal para a determinação
destas constantes, não foram obtidos resultados qualitativos aplicando seu método.
De fato, a tarefa para determinação dos valores dos parâmetros da equação
energética neural mostrou-se bastante árdua mesmo para um número reduzido de
pontos. Porem o seu uso justifica-se quando se trata de sistemas de tempo real, pois
a velocidade de convergência é relativamente alta quando comparadas com outros
métodos inexatos. Outro fator importante para seu uso em sistemas robóticosautômatos móveis está no alto poder de paralelismo inferido nestes sistemas, o que
facilmente permite uma migração para outras soluções em hardware em detrimento
do consumo de recursos computacionais processados.
6. RESULTADOS EXPERIMENTAIS
Os resultados experimentais confirmaram as expectativas como sendo uma
plataforma factível capaz de solucionar as necessidades de locomoção do robôautômato móvel, para o problema proposto especifico, com alto desempenho. A
Figura 6 apresenta o protótipo denominado R3.
www.interscienceplace.org - Página 170 de 196
Figura 6: Vista frontal do protótipo R3
Para melhor detalhar o funcionamento do sistema deliberativo da arquitetura
híbrida adotada, podemos observar os módulos desenvolvidos:
Modelo Ambiental: Foi necessária a descrição da matriz de deslocamento.
Este ponto é fundamental para a correta tomada de decisão quanto à
rota, bem como ferramenta fundamental de acompanhamento do
deslocamento do autômato, Figura 7.
Figura 7: Matriz de Deslocamento
Seleção de Pontos: Para maior imparcialidade quanto ao teste,
demonstrando a sua capacidade de percorrer qualquer conjunto de
pontos do ambiente, um gerador estocástico de pontos foi desenvolvido
onde 5, dos 24 pontos da matriz são selecionados para a visitação. O
aplicativo é capaz de montar uma matriz de custo de deslocamento, entre
os pontos determinados. Estas distâncias, juntamente com os fatores A,
B, C, D, da Equação (2), são fundamentais para a determinação dos
pesos neurais. Na Figura 8 apresentam-se os valores destas constantes
obtidos após sucessivos testes.
Figura 8: Valores dos parâmetros A,B,C,D obtidos.
Otimizador de Rotas: Este certamente é o núcleo de todo o projeto, pois
utiliza recursos de “Inteligência Artificial” para minimizar o caminho a ser
percorrido pelo robô dentro de seu ambiente de deslocamento atendendo
www.interscienceplace.org - Página 171 de 196
a visitação dos pontos determinados pelo módulo de “Seleção de Pontos”.
A determinação da condição inicial da entrada neural é fundamental para
a convergência da rede no mínimo energético global da rede Hopfield
(HAYKIN, 1994). Esta determinação foi obtida por geração estocástica,
variando continuamente os valores entre 0(zero) e 1(um). Este ponto é
também crucial para o cálculo de uma rota de qualidade: diferentes
entradas podem trazer diferentes mínimos locais. Para tentar obter uma
qualidade superior às respostas, o sistema deliberativo gera otimizações
diferentes para diversas entradas, acumulando sempre o melhor resultado
obtido.
Figura 9: Representação da convergência neural em função dos padrões
estocásticos iniciais
A Figura 9 apresenta um gráfico para análise dos resultados, baseado no
problema proposto pela Figura 7. Neste estão dispostos os custos onde ocorreram à
convergência em função dos valores de instâncias das entradas neurais iniciais.
Neste exemplo, podemos encontrar claramente a presença de 3, grupos de
convergência. O primeiro obteve valores de custo superiores a 2, considerados os
piores resultados de otimização. O segundo grupo obteve valores de custo
intermediários com valores entre 1 e 1,5. Neste caso pode-se verificar que este
representa a maioria das convergências. Atribui-se a este, o fato da imprecisão da
escolha dos parâmetros A, B, C, D da Equação (2), e pela possibilidade de
ocorrência de pontos de convergência indesejáveis, naturais de redes Hopfield
www.interscienceplace.org - Página 172 de 196
(HAYKIN, 1994). Finalmente podem-se observar os valores de convergência em
torno de 0.5. Estes sim, ótimos resultados do problema. Neste caso ainda está clara
a existência de uma grande quantidade de pontos de convergência para um grande
grupo de condições neurais iniciais.
A Figura 10 mostra ainda que com uma seleção aleatória de condições iniciais,
rapidamente a rede converge para o mínimo global se o ponto de energia mínima
global corresponder a uma grande quantidade de valores neurais iniciais.
Figura 10: Gráfico do valor de convergência neural em função do número
de gerações de padrões iniciais
A Figura 11 mostra o resultado plotado na interface da aplicação. Verifica-se
neste exemplo, que os resultados qualitativos são de boa qualidade.
Figura 11: Convergência neural - Plotagem do resultado obtido.
www.interscienceplace.org - Página 173 de 196
Sequenciador de Instruções: Uma vez definido a ordem de visitação dos
pontos com o menor custo de deslocamento, é fundamental que o
sistema deliberativo gere uma sequencia de instruções para que o
autômato percorra o caminho necessário até atingi-los. A transmissão
desta sequencia até o autômato está vinculada com a percepção da
chegada em cada estágio intermediário: o robô deve completar uma
instrução antes de receber outra.
Como descrito anteriormente, faz parte das restrições do problema que o
robô só percorra o caminho sobre as linhas que unem os pontos de uma
matriz. Por este motivo, o algoritmo visa minimizar o número de
movimentos
enviados
para
o
autômato.
Esta
otimização
foi
particularmente facilitada pelas equidistâncias dos pontos do modelo
ambiental, pois nestas condições, o trabalho se reduz a uma minimização
de instruções de rotações. Uma decomposição da trajetória inicial em
retas sobrepostas às ligações dos pontos da matriz foi suficiente para
obtenção de resultados satisfatórios, vide Figura 12.
Figura 4: Resposta do Sequenciador de Instruções
www.interscienceplace.org - Página 174 de 196
Tradutor de Comandos: O sistema embarcado do autômato está baseado
em um micro-controlador. Os dados recebidos por ele (instruções do
deliberativo) devem ser traduzidos para uma sinalização de baixo nível
apropriadamente codificada para a transmissão de rádio.
O ponto mais importante deste modelo é que a existência de uma abordagem
híbrida tornou claramente mais simples o desenvolvimento deliberativo do sistema
de controle. Deve ficar claro que o deliberativo é incapaz de detalhar todas as
manobras efetuadas pelo robô, ele simplesmente aguarda a completude do
movimento. Todos os procedimentos intermediários de deslocamento são de
responsabilidade da subsunção.
Desta forma podemos concluir que as principais características do sistema
deliberativo são:
Representação do modelo ambiental de R3;
Uso de RN Hopfield contínua como otimizador de rotas;
Capacidade de criar rotas sobre as linhas da matriz de pontos
(necessidade para os sensores do R3);
7. CONCLUSÕES
Com base nos objetivos iniciais, de se criar um sistema de controle para um
autômato móvel que fosse capaz de se deslocar em um ambiente controlado. Podese observar que os resultados obtidos com a abordagem neural foram bastante
satisfatórios. A construção do protótipo e o desenvolvimento de seu sistema de
controle usando uma abordagem RN-Hopfield, não só atingiram os objetivos iniciais,
como também apresentaram grande fluidez na coordenação dos atuadores do robô.
Outra questão que se pode observar foi a importância da adoção de
métodos de alto desempenho para controle de robôs autônomos através de
sistemas altamente conexionistas, como a Rede Hopfield, que além de apresentar
alto desempenho na convergência, também apresentam característica de migração
para sua implementação puramente em hardware, apesar das dificuldades de se
obter os valores dos parâmetros (A, B, C, D), Equação (2). Deve-se lembrar que a
robótica móvel sempre está envolvida com sistemas de alto desempenho,
www.interscienceplace.org - Página 175 de 196
principalmente tratando-se de robôs autômatos onde toda a reatividade as
adversidades devem partir de seu sistema de controle.
Alem das otimizações neurais, as demais etapas de seu sistema de controle,
também foram eficientes, o autômato demonstrou extrema capacidade de
recuperação e cumprimento da rota mesmo em situações bem adversas.
A abordagem clássica híbrida e a divisão das etapas de seu sistema de
controle, também influenciaram bastante na alta performance e adaptabilidade do
robô, principalmente devido modularização que estas apresentam.
Cabe aqui ressaltar que a adoção de novos sensores e de novos atuadores
viabiliza adaptações deste modelo de controle para execução de tarefas em
ambientes diversos com um amplo número de possíveis aplicações em áreas tais
como indústria, automação de escritórios, auxilio a deficientes físicos ou idosos. Por
exemplo, a adoção de sonares e ajustes no modelo reativo, poderia levar o
autômato para fora de sua plataforma de deslocamento, podendo habitar corredores
ou até mesmo, dutos de transporte de materiais.
Este trabalho fez parte da dissertação de mestrado de um dos autores e
atualmente é tema de pesquisa em iniciação científica de alunos do curso de ciência
da computação da UENF e de estágio de estudantes do Instituto Federal
Fluminense em Campos dos Goytacazes.
Referências Bibliográficas
ARAÚJO, S. A. Navegação Autônoma de Robôs. In: Anais do XXII Simpósio
Brasileiro de Telecomunicações. 2006.
BOTELHO, S. Construindo Robôs Autônomos Holonômicos para Jogar Futebol.
Lab. de I.A. – FURG. Rio Grande do Sul. 2003.
BENINI FABRICIU ALARCÃO VEIGA. Rede Neural Recorrente com Pertubação
Simultânea aplicada no problema do Caixeiro Viajante. Dissertação de
Mestrado. Escola de Engenharia de São Carlos, USP. 2008.
BROOKS, R. A robust layered control system for a mobile robot. IEEE Journal of
Robotics and Automation. 1986.
www.interscienceplace.org - Página 176 de 196
DE LA ROCA , R. F. Você conhece a cirurgia robótica em urologia?. Disponível
em: http://www.minhavida.com.br/especialistas/colunas/53-ricardo-la-roca.htm. Acessado
em Abril 2012. 2008.
FIGUEIREDO, L. Introdução ao Controle de Sistemas não Holonômicos. SBA
Controle & Automação. Vol.15. 2004.
HAYKIN, S. Neural Networks - A Comprehensive Foundation. Macmillan College
Publishing Company, Inc. 1994.
HOPFIELD, J. .; TANK, D.W. Neural Computation of Decisions in Optimization
Problems. Biological Cybernetics. Vol.52, pp.141-152. 1985.
HOPFIELD, J. Neural Networks and Physical Systems with Emergent Collective
Computational Abilities. In: Proceedings of the National Academy of Sciences of
the U.S.A. 1982.
KONISHI, J. Tabu Search for solving optimization problems on Hopfield Neural
Networks. Japão: Division of Systems and Information Engineering, Graduate
School of Engineering, Hokkaido University. 2001.
MACHADO, A. Aplicação da Rede de Hopfield no encaminhamento em redes de
dados. Departamento de Engenharia Informática. Faculdade de Ciências e
Tecnologia. Universidade de Coimbra. 1999.
NILSSON, N. A mobile automaton: An application of intelligence techniques. In:
Proceedings of the 1st. International Joint Conference on Artificial Intelligence.
1969.
PIERI, E. Curso de Robóica Móvel. Universidade Federal de Santa Catarina UFSC, 2002.
MEZENCIO, R. Implementação do método de campos potenciais para
navegação de robôs móveis baseadas em computação reconfigurável.
Dissertação de Mestrado,Universidade de São Paulo, Agosto, 2002.
TOURINO, S. R. G. Guiagem do robô móvel xr4000 para inspeção via internet
de tubulações industriais soldadas. Universidade de Brasília, junho, 2000.
VASCONCELOS, L. Ciências sem fronteiras. Revista Desafios do
desenvolvimento, 2007.
www.interscienceplace.org - Página 177 de 196