ELEMENTOS ELETROMECÂNICOS
¾Potenciômetro
¾Motor elétrico
¾Gerador
Elemento
Entrada
Saída
Potenciômetro
Posição do contato
deslizante
Diferença de
potencial
Motor elétrico
Diferença de potencial
Rotação do motor
Rotação do eixo
Diferença de
potencial
Gerador
Potenciômetro
vo
θ
=
V θ máx
vo
saída
θ
= =
= const ante × θ
entrada V θ máx
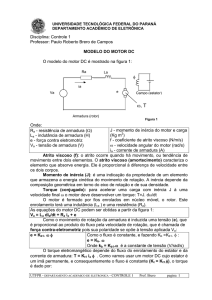
O Motor CC
(a) Acionando uma carga
(b) Princípio básico de um motor
Princípio de funcionamento do motor CC
Princípio de funcionamento do motor CC
Princípio de funcionamento do motor CC
Motor CC
Converte um sinal de entrada elétrico em um sinal de saída mecânico
Enrolamento de armadura – bobina
Enrolamento de campo
F = Bia L sen α
α = 90 o
Com N espiras
F = NBia L
Torque no enrolamento
T = NBia Lb
NLb = k1 = const ante
T = k1 Bia
A armadura é uma bobina girante em um campo magnético.
A força contra-eletromotriz (fcem) é:
vb = k 2 Bω
ω = velocidade angular
K2 =constante
Motor Controlado pela Corrente de Armadura
B = constante
vb = k3ω
K3 =constante
if = corrente de campo = constante
O motor é controlado ajustando-se a tensão de armadura va
va − vb = La
dia
+ Ra ia
dt
dia
va − k3ω = La
+ Ra ia
dt
A corrente ia na armadura gera o torque T
T = k1 Bia = k 4ia
Somatório de Torques = T − torque de amortecimento
I
dω
= k 4ia − cω
dt
Eqs para o motor controlado pela corrente de armadura
va − k3ω = La
I
dia
+ Ra ia
dt
dω
= k 4ia − cω
dt
Motor Controlado pela Corrente de Campo
ia = corrente de armadura = constante
O motor é controlado ajustando-se a tensão de campo vf
v f = Rf if + Lf
di f
dt
A densidade de fluxo B é proporcional a corrente de
campo if e ia é constante
T = k1 Bia = k5i f
B = k ⋅if
Somatório de Torques = T − torque de amortecimento
I
dω
= k5i f − cω
dt
Eqs para o motor controlado pela corrente de campo
v f = Rf if + Lf
I
di f
dt
dω
= k5i f − cω
dt
Diagrama de blocos para os motores
Controlado pela corrente de armadura
Controlado pela corrente de campo
LINEARIDADE
Mola ideal
F = kx
Mola real
Relação não-linear
∆y = m∆x
Eq. Linearizada no ponto de operação P
Exemplo: Velocidade de escoamento de líquido q em um orifício
q = Cd A
2( p1 − p2 )
ρ
⇒
[
q=C
]
( p1 − p2 )
d C ( p1 − p2 )
dq
m=
=
=
d ( p1 − p2 )
d ( p1 − p2 )
2
C
( po1 − po 2 )
Para pequenas variações no ponto de operação
∆q = m∆( p1 − p2 )
q = qo + m∆( p1 − p2 )
Exemplo
3
m
C=2
Se
s.kPa
Ponto de operação
m=
( po1 − po 2 ) = 4 kPa
C
2
=
= 0,5
2 ( po1 − po 2 ) 2 4
∆q = m∆( p1 − p2 ) = 0,5∆( p1 − p2 )
m3
qo = C ( po1 − po 2 ) = 2 4 = 4
s
q = qo + m[( p1 − p2 ) − ( po1 − po 2 )] = 4 + 0,5[( p1 − p2 ) − 4]
Se o orifício é uma válvula de controle de
vazão, a área é ajustada para variar o
fluxo. Neste caso q varia com A e p
q = CA
dq
m1 =
=C
dA
( p1 − p2 )
( p1 − p2 )
dq
m2 =
=
d ( p1 − p2 ) 2
∆q = m1∆A + m2 ∆( p1 − p2 )
q = qo + m1∆A + m2 ∆( p1 − p2 )
CA
( po1 − po 2 )
Exemplo
Um termistor é usado para medir temperatura em um sistema de
controle. A relação entre a resistência R do termistor e sua
temperatura T é dada por:
R = k e − cT
Linearizar essa equação no ponto de operação To
Solução
dR
m=
= − kc e −cTo
dT T =To
(
)
∆R = m∆T = − kc e − cTo (T − To )
(
)
R = Ro + m∆T = k e − cTo + − kc e − cTo (T − To )
R=ke
− cTo
[1 − c(T − To )]
ELEMENTOS MECÂNICOHIDRÁULICOS
A vazão através da válvula, na forma linearizada é
q = qo + m1∆A + m2 ∆( p1 − p2 )
9Para o fluido entrando na câmara a diferença de pressão é (ps-p1) e para
a saída (p2-po)
9Linearização no ponto de operação da válvula fechada, logo qo = 0,
9A área é proporcional a xi,
9A variação na pressão no lado de entrada do pistão é -∆p1 relativa a ps,
9A variação na pressão no lado da saída é ∆p2 relativa a po.
Para a abertura de entrada
q = m1 xi + m2 (− ∆p1 )
Para a saída
q = m1 xi + m2 ∆p2
Somando as duas eqs
2q = 2m1 xi − m2 (∆p1 − ∆p2 )
q = m1 xi − m3 (∆p1 − ∆p2 )
[*]
m2
m3 =
2
Volume do cilindro é A.xo
Para o cilindro a variação de volume é:
dxo
q=A
+ qL
dt
qL é a taxa de vazamento
Substituindo q da eq. [*]
dxo
m1 xi − m3 (∆p1 − ∆p2 ) = A
+ qL
dt
[**]
O vazamento qL ocorre na abertura entre o pistão
e o cilindro, portanto de área constante
qL = m4 (∆p1 − ∆p2 )
Substituindo qL na eq. [**]
dxo
+ m4 (∆p1 − ∆p2 )
m1 xi − m3 (∆p1 − ∆p2 ) = A
dt
dxo [***]
m1 xi − (m3 + m4 )(∆p1 − ∆p2 ) = A
dt
A força exercida na carga devido a
= (∆p1 − ∆p2 ) A
diferença de pressão é
Amortecimento devido ao atrito
Segunda Lei de Newton
dx
=c
dt
∑ F = ma
2
d xo
dxo
m 2 = (∆p1 − ∆p2 ) A − c
dt
dt
Rearranjando essa equação:
2
m d xo c dxo
(∆p1 − ∆p2 ) =
+
2
A dt
A dt
Substituindo pela diferença de pressão na equação [***]
m d 2 xo c dxo
dxo
= A
+
m1 xi − (m3 + m4 )
2
A dt
dt
A dt
Rearranjando
(m3 + m4 )m d 2 xo
c(m3 + m4 ) dxo
= m1 xi
+ A+
2
A
A
dt
dt
Esta eq. pode ser simplificada
(m3 + m4 )m d 2 xo A2 + c(m3 + m4 ) dxo
+
= m1 xi
2
A
dt
A
dt
(m3 + m4 )m d 2 xo dxo
Am1
+
= 2
xi
2
2
A + c(m3 + m4 ) dt
dt
A + c(m3 + m4 )
onde:
d 2 xo dxo
τ 2 +
= k xi
dt
dt
(m3 + m4 )m
τ= 2
A + c(m3 + m4 )
Am1
k= 2
A + c(m3 + m4 )
Exercícios
Exercício para a próxima semana: Exercício 1 ao 7 e 9 ao
14, página 111, Livro Engenharia de Controle, W. Bolton,
Makron Books, 1995.