ELETRÔNICA DE POTÊNCIA I
CONTROLE DE MALHA FECHADA PARA MOTORES CC
Parte 1 – Modelagem do motor
O evolução dos dispositivos de controle da corrente elétrica, notadamente os
FETs (Field Effect Transistor) de potência e os IGBTs (Isolated Gate Bipolar
Transistor) tem levado a um aprimoramento dos sistemas de acionamento
elétrico empregando motores de indução, que em relação aos motores de
corrente contínua apresentam as seguintes vantagens:
São mais baratos
São mais robustos a ambientes mais agressivos
Exigem muito menos manutenção que os motores CC
A grande deficiência dos motores de indução estava justamente nas
estratégias de acionamento dos mesmos que pudessem alterar a freqüência e
a amplitude das tensões de acionamento dos mesmos, o que foi
definitivamente superado com as técnicas de acionamento utilizando PWM
(Pulse Width Modulation) associadas a técnicas de controle que permitem
desacoplar, via algoritmos sofisticados, o controle do fluxo do estator e da
corrente do estator dos motores de indução.
Com tudo o que foi dito acima, existem ocasiões nas quais a controlabilidade, e
até mesmo a pré-existência de uma estrutura baseada em máquinas de
corrente contínua são os fatores motivadores para a utilização das mesmas
em sistemas de controle de velocidade e torque e mesmo posição em sistemas
industriais.
Vamos fazer aqui um estudo dos reguladores de velocidade, ou seja de
sistemas que uma vez fornecida um sinal de referência de velocidade, o
sistema se incumbe de ajustar a velocidade do sistema ao valor relativo a este
sinal de controle. Os motores de corrente contínua, quando operando em
malha aberta, apresentam características torque-velocidade que indicam que a
velocidade se altera quando a solicitação de torque varia e esta solicitação de
torque é totalmente dependente da carga que o motor está acionando.
Quando lidamos com motores de corrente contínua acionados por conversores
estáticos (construídos com semicondutores do tipo SCR) diretamente a partir
da rede CA disponível, temos que enfrentar o problema de ajustar o ângulo de
disparo dos tiristores a medida que as solicitações de torque se alteram de
modo a manter a velocidade no nível previamente ajustado dentro do menor
tempo de ajuste possível, alem disso, existe também o fato no qual as
variações bruscas no sistema de cargas gera transitórios de correntes que
podem danificar os SCRs
A minimização do tempo de resposta dinâmica do sistema, exige a elaboração
de um modelo matemático para o motor de corrente contínua de modo que o
conhecimento dos parâmetros deste modelo permitam aos engenheiros
estabelecerem critérios de projeto que auxiliem na elaboração do sistema de
controle, que nesta condição deve ser de malha fechada, ou seja deve existir
um sinal de realimentação de velocidade que comparado com o sinal de
referência de velocidade, gere uma ação de correção da velocidade através do
ajuste do ângulo de disparo dos tiristores.
A resposta do sistema de malha fechada pode ser estudada usando as
técnicas de função de transferência. Em seguida elaboraremos um
desenvolvimento sistemático das funções de transferência de vários blocos e
também de todo um sistema de controle analógico de malha fechada. De
maneira a facilitar a compreensão, o sistema é reduzido a menor ordem
possível.
Os motores de corrente contínua (CC) de excitação de campo independente
tem um controle de velocidade relativamente mais fácil de realizar e como é
mostrado na figura 1, na maioria das aplicações a tensão de armadura do
motor é controlada por um sistema de realimentação em malha fechada.
Outros aspectos protetivos, tais como limitação de corrente, são incorporados
no sistema de malha fechada. Estudaremos agora a resposta de um sistema
de controle de malha fechada onde as funções de transferência do motor e
seus componentes de controle associados e a resposta geral do sistema são
analisadas para avaliarmos a resposta geral do sistema de acionamento.
A função de transferência do motor
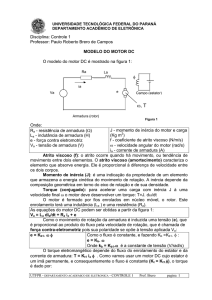
Considerando um motor CC de excitação independente com controle
pela armadura (o campo de excitação também pode ser utilizado para controlar
a velocidade do motor, veja discussão em sala de aula) como mostrado na
figura 2.a. A equação da malha de tensão é dada por (1).
Figura 1
(1)
onde
(2)
Nessas expressões, ea(t) é a tensão instantânea aplicada na armadura do
motor, ia(t) é a corrente de armadura, Ra é a resistência de armadura, La é
indutância de armadura, eg(t) é a força contra-eletromotriz da armadura, é o
fluxo magnético no entreferro n(t) é a velocidade instantânea do eixo do motor
e kf é uma constante que relaciona a corrente de campo do motor com o fluxo
magnético no entreferro, que é produzido pelo circuito de campo.
Com relação a circuito de campo, o mesmo não é modelado no sistema sob
análise, assim admitimos que o campo seja alimentado por tensão nominal,
corrente nominal e produza o fluxo nominal utilizado em na análise realizada.
A equação de balanço de torque, que leva em conta tanto os torques exigidos
para vencer o atrito e o momento de inércia e mais o torque demandado pela
carga é dada por (3)
(3)
Onde o torque produzido pelo motor de corrente contínua é dado pela
expressão (4).
(4)
No domínio da transformada de Laplace, as equações 1 a 4 podem ser escritas
como
(5)
(6)
(7)
(8)
Da equação (5) podemos escrever:
(9)
onde a La / Ra é a constante de tempo elétrica do circuito de armadura do
motor.
Da equação 7 obtemos:
(10)
onde m J / B é a constante de tempo mecânica do motor.
Essas relações são mostradas na figura 2b. Note que a malha de
realimentação se apresenta na forma de uma força contra-eletromotriz. Esta
força contra-eletromotriz provê a moderada regulação de velocidade inerente
ao motor CC com excitação independente. Da figura 2b, admitindo a condição
de linearidade, podemos generalizar para as entradas de tensão de armadura
Ea (s) e o torque da carga TL( s) a seguinte relação:
(11)
que por inspeção fazendo inicialmente TL( s) = 0 e depois Ea ( s) = 0 podemos
escrever:
(11a)
(11b)
(11c)
(11d)
Figura 2
Modelagem do motor CC
Considerando o torque nulo para uma analise relacionada apenas com o sinal
(tensão) de referência de velocidade, a partir das equações 11, 11a e 11b,
podemos escrever:
(12)
Em geral
, ou seja, a resposta dinâmica da constante de tempo da
parte elétrica do modelo é muito menor que a constante de tempo da parte
mecânica, dai o transitório elétrico é muito mais rápido que o mecânico o que
torna a parte mecânica dominante uma vez que o sistema está dinamicamente
atrelado ao comportamento mecânico do sistema. Com estas considerações,
vamos desprezar o efeito do transitório elétrico e levar em conta apenas o
transitório mecânico do sistema, o que reduz a equação (12) à equação (12a):
(12a)
Onde
(12b)
(12c)
Da figura 2b obtemos a expressão (13).
(13)
Onde
Das equações (12) e (13):
(14)
Deste modo, o motor pode ser representado, para o propósito de analise da
tensão de controle, como dois blocos como é mostrado na figura 3.
Figura 3
Exercícios de aplicação:
Exercício 1) Um motor C apresenta os seguinte parâmetro operacionais:
a) Tensão nominal de armadura e de campo shunt de 200V.
b) Corrente nominal de 18A
c) Potência 4,5 hp
d) Velocidade nominal = 3000 rpm
e) Resistência de armadura = 0,45Ω
f) Indutância de armadura 0,042H
g) Momento de inércia = 0,087kg2m
h) Coeficiente de atrito viscoso =0,005Nm/rad/seg
i)
j)
k) Resistência de campo = 200Ω
Admitindo que a máquina seja ligada diretamente a um barramento CC de
200V já alimentada com tensão nominal de campo em regime e a carga
desconectada, calcular, utilizando o modelo simplificado, a resposta da
velocidade e da corrente em função do tempo.
A corrente é determinada por:
Que no domínio do tempo é:
Obviamente a sobre corrente observada na expressão de ia(t) danificará a
máquina CC se a mesma for conectada diretamente ao barramento CC na
condição de malha aberta.
Exercício 2) Repetir os cálculos realizados no exercício 1 utilizando o modelo
não simplificado da máquina.