MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
2 SISTEMAS LINEARES
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Coordenação do Curso das Engenharias e Tecnologia
Índice de tabelas
Tabela 1- Matéria Prima e Produtos..........................................................................................................................6
Prof .Jorge Roberto Grobe 30/03/2015 09:25:48 11a edição CN24NB
ii
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Coordenação do Curso das Engenharias e Tecnologia
Sumário
CAPITULO 2............................................................................................................................................................4
2 METODOS DIRETOS PARA A SOLUÇÃO DE SISTEMAS LINEARES.........................................................4
TRANFORMAÇÕES ELEMENTARES............................................................................................................5
2.1 ELIMINAÇÃO DE GAUSS...............................................................................................................................6
2.1.1 EXERCÍCIOS.............................................................................................................................................6
2.2 PIVOTAMENTO PARCIAL.......................................................................................................................13
2.2.1 Estratégias De Pivotamento................................................................................................................13
2.2.1.1 Pivotação parcial..............................................................................................................................13
2.3.1 Exercicios............................................................................................................................................15
2.3 PIVOTAMENTO TOTAL OU COMPLETO..............................................................................................17
2.4 FATORIZAÇÃO LU....................................................................................................................................20
2.4.1 EXERCICIOS.....................................................................................................................................23
2.5 FATORAÇÃO DE CHOLESKY ou DECOMPOSIÇAO DE CHOLESKY...............................................28
2.5.1 Exercicios............................................................................................................................................29
2.6 TECNICAS ITERATIVAS PARA SOLUCIONAR SISTEMAS LINEARES............................................33
2.6.1 Metodo Iterativo de Jacobi..................................................................................................................34
2.6.1.1Criterio de Convergencia para o Método de Jacobi....................................................................34
2..6.2 Método Iterativo de Gauss-Seidel......................................................................................................37
2.6.3 Exercicios............................................................................................................................................39
2.7 NOÇÕES DE MAL CONDICIONAMENTO.............................................................................................39
2.7.1 Norma Matricial..................................................................................................................................40
2.7.1.1 Exercicios...................................................................................................................................41
J) MATRIZ INVERSA PELA ADJUNTA.........................................................................................................44
L) USANDO SOFTWARE MATEMÁTICO....................................................................................................45
2.8 APLICAÇÕES NA FERRAMENTA MATEMATICA...............................................................................45
2.5.2 Aplicações da Ferramenta Matematica Scilab....................................................................................47
2.5.3 Aplicações da Ferramenta Matematica wxmaxima............................................................................47
REFERÊNCIAS......................................................................................................................................................50
Prof .Jorge Roberto Grobe 30/03/2015 09:25:48 11a edição CN24NB
iii
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
CAPITULO 2
2 METODOS DIRETOS PARA A SOLUÇÃO DE SISTEMAS LINEARES
•
Para BARROSO (1987, p.17) através de um sistema linear S n de n equações e n
variáveis pode-se aplicar em calculo
de estruturas, redes elétricas e solução de
equações diferenciais, entre outras.
•
Um sistema linear Sn de n equações com n incógnitas:
a11 x 1a 12 x 2...a1n x n =b 1
a x a x ...a 2n x n =b 2
S n= 21 1 22 2
..............
an1 x 1an2 x 2...a nn x n=b n
•
Sob a forma matricial Sn
pode ser escrito como Ax=b, onde A é uma matriz
aumentada quadrada de ordem n, b e x são matrizes n por 1 , e aij é chamado de
coeficiente da variável xj e os bj são chamados de termos independentes.
•
A matriz A é chamada matriz dos coeficientes e a matriz aumentada ou matriz
completa do sistema.
[ ]
a11 a 12 ... a1n b 1
B= a21 a22 ... a 2n b 2
.........
a n1 a n2 ... a nn b n
Os números
= [A:b]1
x 1 , x 2 , . .. , x n constituem uma solução do sistema linear e as equações
transformam em igualdades numéricas.
A solução é escrito na forma de matriz coluna:
[]
x 1T
x
X= 2
...
xn
1Concatenção de matrizes
Prof .Jorge Roberto Grobe 30/03/2015 09:25:48 CN24NB
12 a EDIÇÃO
4
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
•
Os sistemas lineares podem ser classificados quanto ao numero de soluções em
compatível, quando tem solução e incompatível não tem solução.
•
Os sistemas compatíveis podem ser determinados ( uma solução) ou indeterminados
( varias soluções).
TRANFORMAÇÕES ELEMENTARES
BARROSO (1987,p.17)
•
trocar a ordem de duas equações do sistema
•
multiplicar uma equação do sistema por uma constante não nula
•
adicionar duas equações do sistema
LEON (2011, p.13) Sistemas sobredeterminados•
há mais equações que variáveis, são geralmente inconsistentes.
LEON (2011, p.15) Sistemas Subdeterminados
•
menos equações do que variáveis.
•
Um sistema subdeterminado possa ser inconsistente , mas geralmente são consistentes
com um numero infinito de soluções.
Métodos diretos: estes métodos determinam a solução de um sistema linear com um numero
finito de operações. BARROSO(1987, p.17)
DALCIDIO( 1989,p.68), o método de Gauss é indicado para matrizes densas não simétricas
de ordem até 50.
Prof .Jorge Roberto Grobe 30/03/2015 09:25:48 CN24NB
12 a EDIÇÃO
5
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
a) ELIMINAÇÃO DE GAUSS
2.1 ELIMINAÇÃO DE GAUSS
2.1.1 EXERCÍCIOS
1) BOLDRINI ( 1980, p.51), resolva os sistemas lineares:
a) x1+2x2-x3+3x4=1
b) x+y+z=4
c) x +y+z=4
d) x-2y+3z=0
2x+5y-2z=3
2x+5y-2z=3
2x+5y+6z=0
x+7y-7z=5
2) FRANCO (2009, p.162) aplicações práticas. Sejam x1,x2,x3,x4 o numero de quatro
produtos que podem ser produzidos no decorrer de uma semana. Para a produção de cada
unidade , precisa-se de tres tipos diferentes de matérias-primas A, B e C, conforme indicado
na tabela 1.0:
Tabela 1- Matéria Prima e Produtos
materia-prima
produtos
A
B
C
1
1
2
4
2
2
0
1
3
4
2
3
4
3
1
2
Para produzir uma unidade de (1) precisa-se de 1 unidade de A, 2 de B e 4 de C. Se existem
disponíveis 30,20 e 40 unidades de A, B, C, respectivamente , quantas unidades de cada
produto pode ser produzido? Resolva o sistema linear pela eliminação de Gauss.
[]
6
−x 4+ 8
2
X=
−x 4+ 8
2
x4
Prof .Jorge Roberto Grobe 30/03/2015 09:25:48 CN24NB
12 a EDIÇÃO
6
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
3) BOLDRINI ( 1980, p.54)Faça o balanceamento das reações:
a)HF + SiO2 →SiF4+H2O ( dissolução do vidro em HF)
SOLUÇÃO :
xHF + ySiO2 →zSiF4+tH2O
equações do balanceamento da reação química
H: x =2t
F: x=4z
Si: y =z
O: 2y =t
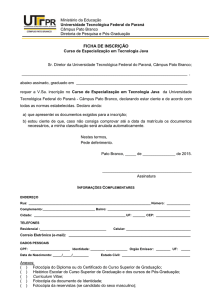
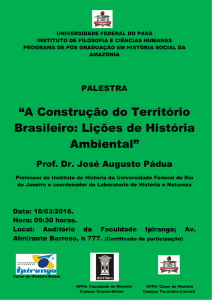
4) LEON (2011, p.17) FLUXO DE TRÁFEGO. Em uma regiao central de certa cidade, dois
conjuntos de ruas mão única se interceptam conforme figura seguir . O volume de trafego
450
310
A
610
D
x1
640
x4
x2
520
B
x3
520
C
600
x3
480
390
* em cada intersecção, o numero de automóveis entrando deve ser o mesmo que o numero
saindo.
x1+450=x2+610 ( intersecção A)
x2+520=x3+480 ( intersecção B)
x3+390=x4+600 ( intersecção C)
Prof .Jorge Roberto Grobe 30/03/2015 09:25:48 CN24NB
12 a EDIÇÃO
7
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
x4+640=x1+310 ( intersecção D)
•
em seguida resolver o sistema linear.
•
RESPOSTA: [k+330;k+170;k+210;k]T
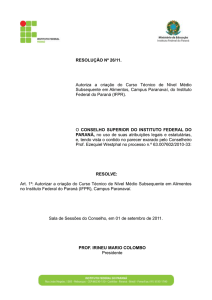
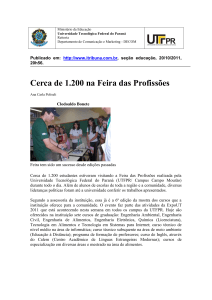
5) LEON (2011, p.24) FLUXO DE TRÁFEGO.Em uma regiao central de certa cidade, dois
conjuntos de ruas mao única se interceptam conforme figura seguir . O volume de tráfego:
380
430
A
x4
x1
D
450
x2
420
400
540
B
x3
420
resposta: x1=280 x2=230 x3=350
C
470
x4=590
LEIS DE KIRCHHOF
LEON(2011, p.18)
1. em qualquer nó , a soma das correntes entrando é igual a soma das correntes saindo.
2. Ao longo de qualquer malha fechada, a soma algebrica de todos os ganhos de tensão deve
ser igual a soma algebrica de todas as quedas de tensão.
Prof .Jorge Roberto Grobe 30/03/2015 09:25:48 CN24NB
12 a EDIÇÃO
8
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
6)LEON(2011, p.18)
As quedas de tensao E cada resistor são dadas pela lei de Ohm, E=iR onde i representa a
corrente em ampéres e R a resistencia em ohms.
Solução : primeira lei i1+i3=i2 ( nó A)
i2=i1+i3 ( nó B)
segunda lei
4i1 +2i2=8 malha superior
2i2 +(2+3)i3=9 malha inferior
resposta: i1=1 i2=2 i3=1
Prof .Jorge Roberto Grobe 30/03/2015 09:25:48 CN24NB
12 a EDIÇÃO
9
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
7) LEON( 2011, p.25)
a) solução : (nó A) i1+i3=i2
( nó B) i2=i1+i3
2i1 +2i2=16
2i2 +3i3=0 resposta:[ 5;3;-2]
b) solução ( no A) i2=i1+i3
( no B) i2=i1+i3
2i1+ 4i2=20
4i2+2i3=20
Prof .Jorge Roberto Grobe 30/03/2015 09:25:50 CN24NB
12 a EDIÇÃO
10
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
c) solução : (nó A) i1+i3==i2
( nó B) i1+i4=i2
( nó C) i3+i6=i5
( nó D) i5=i4+i6
malha superior 2i2+4i1=8
malha
2i2+4i5=0
malha inferior 4i5 +5i6=10
resposta: (2,0,-2,-2,0,2)
8) BARROSO(1987, p.37), determinar o vetor solução dos sistemas lineares através do
método de Eliminação de Gauss: 4 casas
2x13x2x3−x4=6,9
−x1 x2−4x3x4=−6,6
a)
solução exata do sistema
x1 x2x3x4=10,2
4x1−5x2x3−2x4=−12,3
[
[
[
−1 1 −4 1 −6,6
2
3
1 −1
6,9
1
1
1
1
10,2
4 −5 1 −2 −12,3
−1 1 −4
0
5 −7
0
2
−3
0 −1 −15
]
]
1 −6,6
1 −6,3
2
3,6
2 −38,7
−1 1 −4 1 −6,6
0 −1 −15 2 −38,7
0
2
−3 2
3,6
0
5 −7 1 −6,3
]
pivo:-1 operações: 2L1+L2 ; 1*L1+L3 ; 4L1+ L4
permutando L2 e L4
pivo: -1 operações: 2L2+L3 ; 5*L2+L4
Prof .Jorge Roberto Grobe 30/03/2015 09:25:50 CN24NB
12 a EDIÇÃO
11
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
[
[
−1 1 −4 1
−6,6
0 −1 −15 2 −38,7
0
0 −33 6 −73,8
0
0 −82 11 −199,8
]
pivo : -33 -2,4848*L3+ L4
−1 1 −4
1
−6,6
0 −1 −15
2
−38,7
0
0 −33
6
−73,8
0
0
0
−3,9088 −16,4218
x4=4,2012 x3=3,0002
[ ]
6,8968
b̃ = −6,6
10,2006
−12,3
x2=2,0994
]
x1=0,8998
[ ]
0,0032
0
resíduo=
−0,0006
0
* todos os resíduos menores que 10-2
Prof .Jorge Roberto Grobe 30/03/2015 09:25:51 CN24NB
12 a EDIÇÃO
12
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
b) PIVOTAMENTO PARCIAL
2.2 PIVOTAMENTO PARCIAL
2.2.1 Estratégias De Pivotamento
2.2.1.1 Pivotação parcial
CLAUDIO(1989, p.76-79) , é o mesmo que algoritmo de Gauss, com um troca
▪
de linhas sistemáticas, de modo a minimizar os erros de arredondamento.
A escolha dos pivôs é feita da seguinte maneira:
▪
1. é o elemento de maior valor absoluto na coluna 1
2. é o elemento de maior valor absoluto na coluna 2 da matriz-resto.
* outra variante técnica do pivotamento parcial é tornar os pivos unitários visando diminuir o
erro de arredondamento.
2.2.1.2 GILAT ( 2008, p. 124) Potenciais dificuldades encontradas com a aplicação do método
de eliminação de Gaus
a) o elemento pivo é igual a zero
•
se o valor do pivo for igual a zero pode ser corrigido com a mudança da ordem das
linhas ( outro pivo diferente de zero) chamado de pivotação.
b)o elemento pivo é pequeno em relação aos demais termos da linha pivo.
•
Ocorre erros de arredondamento significativos.
9) Seja o sistema linear SPF( 10,4,-10,10) :
0,0003x1 + 12,34x2=12,343
0,4321x1 +x2=5,321
soluçao exata:
solução:
[
[ ]
X=
10
1
0,0003 12,34 12,343
0,4321
1
5,321
]
* usando notação de ponto flutuante o numero 12,343= 0,12343*102= 0,1234*102=12,34
[
0,0003 12,34 12,34
0,4321
1
5,321
]
Prof .Jorge Roberto Grobe 30/03/2015 09:25:51 CN24NB
12 a EDIÇÃO
13
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
usando a eliminação de Gauss.
m1=-0,4321/0,0003=-1440,3333=0,14403333*104 =-1440 ( SPF(10,4,-10,10)
[
•
-1440*12,34+1=-17768,6=-0,177686*105=0,1777*105=-17770
•
-1440*12,34+5,321=-17764,279=-0,1776*105=-17760
0,0003 12,34
12,34
0
−17770 −17760
]
x2=0,9994
operação realizada :m1*L1+L2
primeira linha
0,0003*x1+12,34*x2=12,34
0,0003*x1+12,34*0,9994=12,34
0,0003*x1+12,33=12,34
x1=33,33
Aplicando o pivotamento parcial
[
[
0,4321
1
5,321
0,0003 12,34 12,34
0,4321
1
5,321
0
12,34 12,34
]
]
m1=0,0003/0,4321=0,0006943=0,6943*10-3
x2=1 x1=10
10) FRANCO( 2009, p.146-147) Através do método de eliminação de Gauss, resolver o
sistema linear:
0,0001x1+ x2=1
x1+x2=2
usando em todas as operações com tres digitos significativos.
X=[0;1]
solução :
[
[
0,0001 1 1
1
1 2
]
0,0001
1
1
0
−9999 −9998
]
m1=-10000
Prof .Jorge Roberto Grobe 30/03/2015 09:25:51 CN24NB
12 a EDIÇÃO
14
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
x2=1 e x1=0
11) Resolver pelo pivoteamento parcial
resposta: x=[1;1]
[
1
1 2
0,0001 1 1
]
m1=-0,0001
[
1 1 2
0 1 1
]
x1=1 x2=1
2.3.1 Exercicios
12) CLAUDIO (1987, p.89) Resolva o sistema linear com pivoteamento parcial usando 5
casas após a virgula:
2,4759 x1 +1,6235x2+4,6231x3=0,0647
1,4725 x1+ 0,9589x2-1,3253x3=1,0473
2,6951x1+2,8965x2-1,4794x3=-0,6789
[
2,6951
2,8965
−1,4794 −0,6789
0
−0,62363 −0,51702 1,41822
0
−1,03743 5,98218 0,68839
]
m1=-0,54636 m2=-0,91867
m1*L1+L2
m2*L1+L3
[
2,6951
2,8965
−1,4794 −0,6789
0
−1,03743 5,98218 0,68839
0
0
−4,11309 1,00441
]
m3=-0,60113
m3*L2+L3
Prof .Jorge Roberto Grobe 30/03/2015 09:25:51 CN24NB
12 a EDIÇÃO
15
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
[
1,84056
X = −2,07169
−0,24420
] [
0,06469
b̃ = 1,04732
−0,67889
]
[
0,00001
b−b̃ =resíduo=r= −0,00002
−0,00001
para calcular b̃ faz-se a substituição do
]
X no sistema de equações.
13) BARROSO (1987, p.37) ,determinar o vetor solução dos sistemas lineares através do
método da Pivotação parcial. * 4 casas após a virgula
2x13x2x3−x4=6,9
−x1 x2−4x3x4=−6,6
a)
x1 x2x3x4=10,2
4x1−5x2x3−2x4=−12,3
Prof .Jorge Roberto Grobe 30/03/2015 09:25:51 CN24NB
12 a EDIÇÃO
16
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
c) PIVOTAMENTO TOTAL OU COMPLETO
2.3 PIVOTAMENTO TOTAL OU COMPLETO
•
Em sistema linear escolhe o elemento de maior módulo e não pertencente à coluna dos
termos independentes.
•
Quando ocorre um pivo nulo deve-se efetuar uma troca de linhas para escolher um
pivo não nulo.
•
Outra maneira de se evitar o pivo nulo é usar o método da pivotação completa.
•
Esta pivotação minimiza a ampliação dos erros de arredondamento durante as
eliminação, sendo recomendado na resolução de sistemas lineares de maior porte.
BARROSO(1987, p.40).
14) BARROSO (1987, p.37) ,determinar o vetor solução dos sistemas lineares através do
método da Pivotação Completa : 4 casas após a virgula
2x1+3x2+ x3− x4=6,9
−x1+ x2−4x3+ x4=−6,6
a)
x1+ x2+ x3+ x4=10,2
4x1−5x2+ x3−2x4=−12,3
SOLUÇAO:
permutou a L1 com L4
4 −5 1 −2 −12,3
−1 1 −4 1 −6,6
1
1
1
1
10,2
2
3
1 −1
6,9
pivo: -5
0,2*L1+L2
0,2*L1+L3
0,6*L1+L4
Prof .Jorge Roberto Grobe 30/03/2015 09:25:51 CN24NB
12 a EDIÇÃO
17
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
4
−5
1
−2 −12,3
−0,2 0 −3,8 0,6 −9,06
1,8
0
1,2
0,6
7,74
4,4
0
1,6 −2,2 −0,48
pivo: 4,4
permutou a L4 com L2
4
−5
1
−2 −12,3
4,4
0
1,6 −2,2 −0,48
1,8
0
1,2
0,6
7,74
−0,2 0 −3,8 0,6 −9,06
operações L2 ~ L3 ; L2~L4
-0,4091*L2+L3
0,0455*L2+L4
4 −5
1
−2
−12,3
4,4 0
1,6
−2,2 −0,48
0
0
0,5454
1,5
7,9364
0
0 −3,7272 0,5 −9,0818
pivo: -3,7272
0,1463*L3+L4
permutar L4 ~L3
1,5731 x4=6,6077
[ ]
0,9002
2,1
VETOR SOLUÇAO: X =
3
4,2004
[ ]
6,9
b̃ = −6,5998
10,2005
−12,3
[ ]
0
resíduo= −0,0002
−0,0005
0
* todos os resíduos menores que 10-3
Prof .Jorge Roberto Grobe 30/03/2015 09:25:51 CN24NB
12 a EDIÇÃO
18
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
4x13x22x3 x4=10
x12x23x34x4=5
b)
x1−x2−x3−x4=−1
x1x2x3 x4=3
4 3
2
1
10
0 1,25 2,5 3,75 2,5
0 -1,75 -1,5 -1,25 -3,5
0 0,25 0,5 0,75 0,5
Pivo: 4
4 3
2
1
0 1,25
2,5
3,75 2,5
0 -1,3333 -0,6667 0
10
-2,6667
0 0
0
0
0
Pivo:3,75 Pivo: -0,6667
primeira equação :
4*x1+3*x2+2*x3+1*x4=10
isolando a variável do pivo
10−x 4−2∗x 3−3∗x 2
4
x 1=
segunda equação
1,25*x2+2,5*x3+3,75*x4=2,5
isolando a variável do pivo
x 4=
2,5−1,25∗x 2−2,5∗x 3
3,75
terceira equação
-1,3333*x2-0,6667*x3=-2,6667
isolando a variável do pivo
x 2=
−2,6667+0,6667∗x 3
−1,3333
quarta equação
0x3=0 (variável livre- aparece em todas as equações)
x 3=λ
Prof .Jorge Roberto Grobe 30/03/2015 09:25:51 CN24NB
12 a EDIÇÃO
19
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
15) BARROSO( 1987, p.41) Resolver o sistema linear , usando 5 casas após a vírgula:
0,8754 x 1+ 3,0081 x 2 +0,9358 x3 +1,1083 x 4=0,8472
2,4579 x 1−0,8758 x 2+1,1516 x 3−4,5148 x 4=1,1221
resposta: X=[1;-1;2;1]T
5,2350 x 1−0,8473 x 2−2,3582 x3 +1,1419 x 4=2,5078
2,1015 x 1 +8,1083 x 2−1,3232 x 3 +2,1548 x 4=−6,4984
i) pivotamento total ii) pivotamento parcial
iii) eliminação de Gauss
d) FATORIZAÇÃO LU
2.4 FATORIZAÇÃO LU
•
Para KOLMAN (1999, p.443), uma matriz é decomposta como um produto de uma
matriz triangular inferior com uma matriz triangular superior.
•
Esta decomposição leva o algoritmo para resolver um sistema linear Ax=b.
•
A popularidade deste método faz com que forneça uma maneira mais “ barata” de
resolver um sistema linear quando se faz uma mudança no vetor b de Ax=b.
•
A decomposição para resolver o sistema linear , onde U e´ a matriz triangular superior
e L e´ uma matriz triangular inferior.
•
A matriz U e´ resolvida sem colocar a matriz aumentada [ U: b], e possuem todos os
elementos diagonais diferentes de zero.
•
A solução é obtida de baixo para cima. Para a construção da matriz L, coloca-se na
diagonal principal iguais a 1.
•
Colocar na primeira coluna L1 , respectiva os multiplicadores com sinal trocado e
assim por diante.
•
Suponha que uma matriz A n x n pode ser escrita com um produto de uma matriz
triangular inferior L com uma matriz triangular superior U, ou seja : A=LU.
•
Entåo diz-se que A tem uma fatorização LU ou decomposição LU.
•
Substituindo A=LU, no sistema Ax=b, escreve-se (LU)x=b. Fazendo Ux=z , então essa
equação matricial fica escrita Lz=b.
Prof .Jorge Roberto Grobe 30/03/2015 09:25:51 CN24NB
12 a EDIÇÃO
20
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
Segundo BURDEN (2003, p.339-341), esta fatoração e´ chamada de método de Doolitle e
requer que valores iguais a 1 estejam na diagonal de L.
Então as matrizes L e U podem ser escritas:
Para LAY (1999, p.125) , existem matrizes unidades triangulares inferiores E1...Ep tais
que:
E p ... E 1∗A=U
A=( E p ... E 3 . E 2 . E 1)−1∗U ou
−1
−1
−1
L=E−1
1 ∗E 2 ∗E 3 ... E P
A=L*U
O método de Crout requer valores iguais a 1 estejam na diagonal de U
Seja Ax=b
fonte:http://www.monografias.com/trabajos92/factorizacion-matrices/image023.png
•
A=Lc*Uc
•
A matriz Lc (matriz triangular inferior) possui diagonal principal diferente de zero e
diferente de 1 e é obtida da seguinte maneira:
•
Lc=L*D ( as matrizes L e D são obtidas da fatoração LU, onde D é matriz diagonal
da matriz U) , esta matriz Lc é triangular inferior.
•
Para obter a matriz triangular superior UC do método de Crout , divide cada linha
matriz U ( fatoração LU ) pelos elementos da diagonal principal.
•
Então pode- se escrever :A=Lc*Uc
•
ou a matriz pode ser fatorada na forma de:
Prof .Jorge Roberto Grobe 30/03/2015 09:25:51 CN24NB
12 a EDIÇÃO
21
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
•
A=L*D*Uc= Lc*UC
•
L= matriz triangular inferior com diagonal igual a 1 da fatoração LU
•
D= matriz diagonal de U
•
UC= matriz triangular superior com diagonal principal igual a 1.
O esforço computacional
•
•
CUNHA(2009, p.34) , em um sistema triangular requer n2 operações.
2n 3
2n 3 3n 2 7n
Para eliminação de Gauss requer
e para n grande
+
−
3
3
2
6
Na fatoração LU tem dois sistemas triangulares portanto requer 2n2 operações.
ALGORITMO DA FATORIZAÇÃO LU DOOLITLE
Os elementos da matriz L são os aij e os de U são os uij .
u1k a1k
u jk a jk
j1
jk
k 1, , n
j 1
ji u ik
k j, , n ; j 2
i 1
a j1
j 2, , n
u11
1
a jk
u kk
k 1
ji u ik
i 1
j k 1, , n ; k 2
fonte: http://MetodosNumericoseEstatisticos/MNEaula04.ppt
Prof .Jorge Roberto Grobe 30/03/2015 09:25:51 CN24NB
12 a EDIÇÃO
22
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
2.4.1 EXERCICIOS
x 1 x 23x 4=4
2x 1x 2− x 3x 4=1
3x 1−x 2 −x 32x 4 =−3
−x 12x 23x 3−x 4=4
16)BURDEN( 2003, p.340), seja o sistema linear
[
1 1
0
3
0 −1 −1 −5
U=
0 0
3
13
0 0
0 −13
] [
1
0
2
1
L=
3
4
−1 −3
0
0
1
0
0
0
0
1
]
RESPOSTA: [ -1;2;0;1]T
17) BURDEN (2003, p.345) Resolver o seguinte sistema linear pelas seguintes fatorações:
2x 1−x 2 + x 3=−1
3x 1+ 3x 2+ 9x 3=0
3x 1+ 3x 2+ 5x 3=0
i) Doolitle
solução 1:
passo1: eliminação de Gauss
[
2 −1 1
A= 3 3 9
3 3 5
] [
2 −1 1
U = 0 4,5 7,5
0 4,5 3,5
] [
2 −1 1
U = 0 4,5 7,5
0 0 −4
] [
1 0 0
L= 1,5 1 0
1,5 1 1
]
operações
m1=-3/2=-1,5 m1*L1+L2
m2=-3/2=-1,5
m2*L1+L3
m3=-4,5/4,5=-1 m3*L2+L3
passo 2: Ux=z e Lz=b
resposta: Z=[-1;1,5;0]
X=[-1/3;1/3;0]
solução 2:
Prof .Jorge Roberto Grobe 30/03/2015 09:25:51 CN24NB
12 a EDIÇÃO
23
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
[
1
0 0
L= L 21 1 0
L 31 L32 1
] [
u11 u12 u13
U = 0 u 22 u 23
0
0 u33
] [ ]
2 −1 1
A= 3 3 9
3 3 5
ii) Crout
A=LDLc
a matriz Lc é obtida atraves da matriz
[
2 −1 1
U = 0 4,5 7,5
0 0 −4
[ ]
2
2
elemento de cada diagonal, U c = 0
−1
2
4,5
4,5
0
[
][
0
][
1
2
7,5
4,5
−4
−4
1 0 0 2 0
0 1 −0,5 0,5
AC = 1,5 1 0 0 4,5 0 0
1
5 /3
1,5 1 1 0 0 −4 0
0
1
[
][
[
]
, dividindo cada linha pelo
1 −0,5 0,5
U c= 0
1
5/3
0
0
1
]
]
]
]
1 0 0 2 0
0
L=
L*D=
1,5 1 0 0 4,5 0
1,5 1 1 0 0 −4
[
][
2 0
0 1 −0,5 0,5
= A= 3 4,5 0 0
1
5 /3
3 4.5 −4 0
0
1
A=(L*D) *Uc
iii) solução pela fatoração LU
Lz=b e Ux=z
resposta: Z=[-0,5;1/3;0] X=[-1/3;1/3;0]
Prof .Jorge Roberto Grobe 30/03/2015 09:25:52 CN24NB
12 a EDIÇÃO
24
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
18) KOLMANN (1999, p.448) , resolver os sistemas lineares Ax=b pelas seguinte fatorações:
i) Doolitle ii) Crout
a) A=[ 2 3 4;4 5 10;4 8 2] b=[6;16;2]
solução
i) fatoração LU - doolitle
[
] [
]
] [
]
2 3
4
U = 0 −1 2
0 0 −2
1 0 0
L= 2 1 0
2 −2 1
ii) crout
[
1 0 0
L= 2 1 0
2 −2 1
2 0
0
D= 0 −1 0
0 0 −2
[
2 0
0
Lc = L∗D= 4 −1 0
4 2 −2
•
]
Na matriz Uc é obtida atraves da matriz U e para obter a diagonal principal 1 é preciso
dividir cada linha pelo elemento da diagonal principal.
[ ]
2
2
U c= 0
0
3
2
−1
−1
0
4
2
2
−1
−2
−2
[ ]
1
U c=
0
0
3
2
2
1 −2
0 1
, então matriz A pode ser fatorada da seguinte
maneira:
[
2 0
0
Lc = L∗D= 4 −1 0
4 2 −2
]
[ ]
1
U c=
0
0
3
2
2
1 −2
0 1
, A=Lc*Uc
ou pode ser decomposta na
forma : A=L*D* Uc
Prof .Jorge Roberto Grobe 30/03/2015 09:25:52 CN24NB
12 a EDIÇÃO
25
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
[
1 0 0
L= 2 1 0
2 −2 1
] [
2 0
0
D= 0 −1 0
0 0 −2
]
[ ]
1
U c=
0
0
3
2
2
1 −2
0 1
iii) solução do sistema linear pela fatoração LU.
Lz=b
•
[
] []
[]
6
b= 16
2
1 0 0
L= 2 1 0
2 −2 1
resposta :
6
z= 4
−2
Ux=z
[
2 3
4
U = 0 −1 2
0 0 −2
] []
6
z= 4
−2
[]
4
x= −2
1
iv) solução do sistema pelo método de Crout
Lc*z=b
•
[
] []
[]
2 0
0
Lc = 4 −1 0
4 2 −2
6
b= 16
2
3
Z=
resposta:
−4
1
•
Uc=Z
Prof .Jorge Roberto Grobe 30/03/2015 09:25:52 CN24NB
12 a EDIÇÃO
26
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
[ ]
1
U c=
0
0
3
2
2
1 −2
0 1
[]
3
Z= −4
1
[]
4
resposta: X = −2
1
b) A=[ 2 8 0;2 2 -3;1 2 7] b=[18;3;12]
c)A=[ -3 1 -2;-12 10 -6; 15 13 12] b=[15;82;-5]
[
... ... 3 ...
4 −1 10 8
19)FRANCO (2009, p.128) Aplicando-se a fatoração LU A=
... −3 12 11
0 −2 −5 10
as
matrizes
[
... ... ... ...
2 ... ... ...
L=
3 0 ... ...
.. ... 1 ...
] [
... −1 ... 5
0 1 ... −2
U=
... 0 3 −4
0 ... 0 10
]
.
Preencher
]
os
obteve-se
espaços
pontilhados, usando o método de Doolitle.
Respostas: A=[ a11=2 a12=-1 a13=5 a31=6 ] L= diagonal principal igual a 1 , L31=0
L32=-2 ]
U= [ u11=2 u12 =-1 u13=3 u23=4 ]
KOLMAN(1998, p.244) diagonalização de matrizes: B=P−1∗A∗P
A= matriz primitiva
P=autovetores
B=resulta na diagonal os autovalores
Prof .Jorge Roberto Grobe 30/03/2015 09:25:52 CN24NB
12 a EDIÇÃO
27
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
e) FATORAÇÃO DE CHOLESKY ou DECOMPOSIÇAO DE CHOLESKY
2.5 FATORAÇÃO DE CHOLESKY ou DECOMPOSIÇAO DE CHOLESKY
•
Em BURDEN (2003, p.349), o método de Cholesky, que requer que lii =uii para cada i.
•
A matriz definida positiva é chamada definida positiva simétrica.
•
Em PERESSINI (1988), a fatoração LLT resolve um sistema linear Ax=b onde U= LT
é uma matriz triangular superior com os elementos da diagonal positivos.
•
Condição para uma matriz ser definida positiva de tamanho n xn:
•
a) aii>0 para cada i=1,2,...,n
•
b) xTAx>0 para todo vetor n-dimensional.
•
c)determinante matrizes condutoras ou submatrizes são positivas.
•
d) na eliminação de Gauss sem intercambio de linhas todos os pivôs positivos.
•
Matriz nxn A e chamada de estritamente em diagonal quando
•
•
é valido para cada i=1,2,...,n
BURDEN (2003, p.346).
KOLMANN(1998, p.399) uma matriz simétrica A é positica definida se e somente se
todos os autovalores são posítivos.
•
A matriz L na fatorizaçao de Cholesky da matriz definida positiva pode ser calculada
pela seguinte matriz equação A=LLT.
[ ][ ]
l 11 ....
l 21 l 22 ....
....
l n1 l n2 ... l nn
l 11 l 21 ... l n1
... l 22 ... l n2
........
l nn
=A=L*LT
Para resolver o sistema Ax=b faz-se:
Lz=b e Lty=z
ou pode ser fatorada a matriz simétrica definida positiva conforme RUGGIERO ( 1996,p.147)
•
A=GGT
•
A=LU
Prof .Jorge Roberto Grobe 30/03/2015 09:25:52 CN24NB
12 a EDIÇÃO
28
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
•
A=LDLT
•
U=DLT
D= √ D diagonal da matriz U
A=(L∗D)∗( D∗LT ) sendo G=L∗D A=GGT
2.5.1 Exercicios
20)BURDEN (2003, p.352-357)
(
)
4
−1
1
a) Fatores a matriz A= −1 4,25 2,75 pelos seguintes métodos :
1 2,75 3,5
i) doolitle
ii) crout
iii) cholesky
solução 1: doolitle
(
1
0
0
L= −0,25
1
0
0,25 0,75 1
) (
4 −1 1
U= 0 4 3
0 0 1
)
a diagonal principal :4.4,1 são autovalores da matriz U
solução 2: crout
Lc=L*D Uc= dividir cada linha pelo elemento da diagonal principal
(
)(
)(
1
0
0 4 0 0 4 /4 −1/4 1/4
−0,25
1
0 0 4 0 0
4/ 4 3/4
0,25 0,75 1 0 0 1 0
0
1/1
[
4 0 0
Lcrout = −1 4 0
1 3 1
*
]
[
1 −1 /4 1/4
U crout = 0
1
3/4
0
0
1
)
]
Lcrout =U doolitle * matriz simétrica
Prof .Jorge Roberto Grobe 30/03/2015 09:25:52 CN24NB
12 a EDIÇÃO
29
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
solução 3: cholesky
A matriz LDLT:
(
)(
)(
1
0
0 4 0 0 1 −0,25 0,25
−0,25
1
0 0 4 0 0
1
0,75
0,25 0,75 1 0 0 1 0
0
1
)
* calcular a raiz quadrada da diagonal principal da matriz U ( doolitle)
1
0
0
−0,25
1
0
0,25 0,75 1
(
(
1
0
0
−0,25
1
0
0,25 0,75 1
(
)(
)(
)
√4
0
0
√4
0
0
)(
)
0
√4
0
0 1 −0,25 0,25
1
0,75
0 0
0
1
√1 0
0
√4
0
0
0
√1
)
2
0 0
G= −0,5 1 0
0,5 1,5 1
conclusão:
(
) (
) (
2
0 0
2 −0,5 0,5
4
−1
1
t
G= −0,5 2 0 G = 0
2
1,5 A= −1 4,25 2,75
0,5 1,5 1
0
0
1
1 2,75 3,5
)
produto :G*Gt =A
Prof .Jorge Roberto Grobe 30/03/2015 09:25:52 CN24NB
12 a EDIÇÃO
30
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
b) Mostrar que a matriz simétrica é definida positiva.
(
)
2 −1 0
A= −1 2 −1
0 −1 2
Dica: calcular os determinantes das submatrizes
c) Considere as matrizes
7 2 0 e
6
4 −3 , mostre que é possível ou
A= 3 5 −1 B= 4 −2 0
0 5 −6
−3 0
1
não fatorar pela decomposição de Cholesky.
21) Resolva os sistemas lineares pela fatorações
i) doolitle
ii) crout
iii) cholesky
a) 2x1 –x2 =3
-x1 +2x2 –x3=-3
-x2 +2x3=1
b)
4x1 +x2 +x3+x4=0,65
x1 +3x2 –x3 +x4=0,05
x1- x2 +2x3 =0
x1+x2 + 2x4 =0,5
Prof .Jorge Roberto Grobe 30/03/2015 09:25:52 CN24NB
12 a EDIÇÃO
31
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
22) FRANCO (2009,p.145) Aplicando-se o processo de Cholesky a matriz A, obteve-se :
[
... 2 ... ...
... 8 10 −8
A=
3 10 14 −5
... −8 ... 29
]
=L*Lt onde
[
1 ... ... ...
L= 2 ... ... ...
... 2 1 ...
0 −4 ... 2
]
Preencher os espaços
pontilhados com valores adequados.
23) FRANCO (2009,p.159) Relacione os sistemas lineares :
I)
II)
[]
3x 2+ 2x3 =5
x 1+ 4x 2+ x 3=6
2x 2+ 5x3=7
1
resposta: X = 1
1
[ ]
[] []
−2x1 + 2x 2=−1
1,357
X
=
x 1+ 3x 2− x 3=3 resposta:
0,8572
0,9286
−x 2+ 2x 3=1
x 1+ 2x 2+ x 3=4
4
1
Z=
X
=
2x
+
6x
=8
III)
resposta:
0
1
1
2
1
1
x 1+ 4x 3=5
e resolva pela eliminação de Gauss ou decomposição de Cholesky.
24) Dada a matriz
[
2
1 −1
A= 1 10 2
−1 2
4
]
calcular A-1 utilizando o processo de Cholesky.
25) BURDEN( 2003,p.358) Encontre α de modo que
[
α 1 −1
A= 1 2 1
−1 1 4
]
seja definida
positiva.
Prof .Jorge Roberto Grobe 30/03/2015 09:25:52 CN24NB
12 a EDIÇÃO
32
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
f) MÉTODOS ITERATIVOS
2.6 TECNICAS ITERATIVAS PARA SOLUCIONAR SISTEMAS LINEARES
•
Para BURDEN (2003, p.381), os métodos iterativos de Jacobi e de Gauss-Seidel
surgiram no final do século XVIII.
•
Estas técnicas são raramente utilizadas para solucionar sistemas lineares de pequenas
dimensões.
•
Em sistemas grandes, com uma grande porcentagem de entradas zero, essas técnicas
são eficientes em termos tanto de calculo como de armazenamento.
•
São sistemas que surgem na analise de circuitos e na solução numérica de problemas
de valor limite e equações diferenciais parciais.
•
Esta técnica iterativa para resolver sistemas linear nxn Ax=b começa com um
aproximação inicial x(o) para a solução x e gera uma seqüência de vetores x K para k
=0 até ꝏ(infinito) , que converge para x.
•
O sistema Ax=b e convertido em um sistema equivalente na forma x=Tx+c para
alguma matriz T e algum vetor c fixos.
•
Quando o vetor inicial xo ter sido selecionado, a seqüência de vetores para aproximar
a solução ‘e gerada calculando-se:
k
x =Tx
k−1
c para cada k=1,2,3...
Prof .Jorge Roberto Grobe 30/03/2015 09:25:52 CN24NB
12 a EDIÇÃO
33
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
g) MÉTODO DE JACOBI
2.6.1 Metodo Iterativo de Jacobi
BURDEN(2003, p.383)
A equação Ax=b ou (D-L-U)x=b , é transformada em Dx=(L+U)x+b, isolando x,
•
tem-se :
−1
−1
x=D LU xD b para D matriz não singular.
Resulta na forma matricial da técnica iterativa de Jacobi:
•
x
k+1
−1
(k)
−1
=D ( L+U ) x + D b para k=0,1,2,...
Introduzindo a notação
T j=D−1 LU e c j=D−1 b , então a técnica iterativa de Jacobi
passa a ter a forma x k+1=Tx k +c
Critério de interrupção de Passo:
∥x k −x k −1∥
tol
∥ x k∥
( tol=tolerância)
Para BARROSO (1987, p.52), continua-se a gerar aproximações até que um dos critérios seja
satisfeito:
max ∣x
k1
− x ∣tol
k
ou k>M , M=numero maximo de iterações.
Nota: a tolerância (Epsílon) fixa o grau de precisão das soluções.
2.6.1.1Criterio de Convergencia para o Método de Jacobi
a) BARRROSO (1989,p.67) Criterio das Linhas: é condição suficiente para que a iteração
convirja, que:
n
∣a ii∣>
∑
j=1 e j≠i
∣aij∣ para i=1,2,..n
b) Criterio das colunas:é condição suficiente para que a iteração convirja, que:
n
∣a jj∣>
∑
i=1 ei≠ j
∣aij∣
Prof .Jorge Roberto Grobe 30/03/2015 09:25:52 CN24NB
12 a EDIÇÃO
34
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
Na pratica são usados criterios de suficiencia de convergência tanto para o metodo de Jacobi
e Gauss-Seidel.
Este Criterio de convergência para o metodo de Jacobi converge testanto se a matriz dos
coeficientes é estritamente diagonalmente dominante.FRANCO (2009, p.173)
26)O Sistema linear Ax=b dado por
10x1 –x2 +2x3=6
-x1 +11x2 –x3+3x4=25
2x1-x2+10x3-x4=-11
3x2-x3+8x4=15
resolva pelo método de Jacobi.
[]
0
o 0
X
0
0
, e o critério de parada
ϵ<10−3
solução:
isolar cada variável x1,x2,x3,x4 e encontrar as equações e compor a matriz T com
a diagonal igual a zero.
k
x =Tx
k−1
c
Construir uma tabela para x1,x2,x3 e x4
Usar o vetor inicial nulo.
Prof .Jorge Roberto Grobe 30/03/2015 09:25:52 CN24NB
12 a EDIÇÃO
35
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
k
x1
0
1
2
3
4
5
6
7
8
9
10
x2
0
0,6000
1,0473
0,9326
1,0152
0,9890
1,0032
0,9981
1,0006
0,9997
1,0001
x3
0
2,2727
1,7159
2,0533
1,9537
2,0114
1,9922
2,0023
1,9987
2,0004
1,9998
x4
0
-1,1000
-0,8052
-1,0493
-0,9681
-1,0103
-0,9945
-1,0020
-0,9990
-1,0004
-0,9998
criterio de parada
0
1,8750
0,8852
1,1309
0,9738
1,0214
0,9944
1,0036
0,9989
1,0006
0,9998
FALSO
FALSO
FALSO
FALSO
FALSO
FALSO
FALSO
FALSO
FALSO
VERDADEIRO
Sintaxe: E(ABS(C5-C4)<10^-3;ABS(D5-D4)<10^-3;ABS(E5-E4)<10^-3;ABS(F5-F4)<10^-3)
2.6.1.2 Exercicios
27) Obtenha as 4 primeiras iterações do método de Jacobi para os seguintes sistemas lineares,
usando xo=0.
a)3x1-x2+x3=1
3x1+6x2+2x3=0
3x1+3x2+7x3=4
28) Resolva o seguinte sistema linear :
a)
[
][
][ ] [ ]
1 0 0 2 3 −1 x1
2
2 1 0 0 −2 1 x2 = −1
−1 0 1 0 0
3 x3
1
Prof .Jorge Roberto Grobe 30/03/2015 09:25:52 CN24NB
12 a EDIÇÃO
36
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
h) MÉTODO DE GAUSS-SEIDEL
2..6.2 Método Iterativo de Gauss-Seidel
•
A forma matricial do método de Gauss-Seidel é:
(D-L)xk=Uxk-1+b
Isolando xk tem-se:
xk= (D-L)-1Uxk-1+(D-L)-1b
•
Em LAY (1999),uma matriz A, nxn é chamada de estritamente dominante se o modulo
de cada elemento da diagonal principal é maior que a soma dos módulos dos outros
elementos da sua linha.
•
A velocidade de convergência depende do quanto os elementos da diagonal principal
dominam as somas de linhas correspondentes.
2.6.2.1 Criterio de Convergência para o Método de Gauss-Seidel.
FRANCO ( 2009,p.177-178) , o metodo de Gauss-Seidel converge se :
a) criterio de Sassenfeld for satisfeito :
max i 1 onde os Βi=α s são calculados por recorrencia através de :
1in
Prof .Jorge Roberto Grobe 30/03/2015 09:25:53 CN24NB
12 a EDIÇÃO
37
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
fonte:http://www.ctec.ufal.br/professor/enl/metnum/condicao_para_convergencia.htm
n - ordem do sistema linear que se deseja resolver
aij - coeficientes das equações do sistema
Este critério garante que o método de Gauss-Seidel convergirá para um dado SEL se a
quantidade M, definida por:
M = max β i
1≤i≤n
for menor que 1 (M<1
M<1).
29) O sistema linear dado
10x1 –x2 +2x3=6
-x1 +11x2 –x3+3x4=25
2x1-x2+10x3-x4=-11
3x2-x3+8x4=15
resolva pelo metodo de Gauss-Seidel.
Solução:
k
x1
0
1
2
3
4
5
x2
0
0,6000
1,0302
1,0066
1,0009
1,0001
x3
0
2,3273
2,0369
2,0036
2,0003
2,0001
x4
0
-0,9873
-1,0145
-1,0025
-1,0003
-1,0002
criterio de parada
0
0,8789
0,9843
0,9984
0,9998
0,9998
FALSO
FALSO
FALSO
FALSO
VERDADEIRO
30)Mostre que o método de Gauss-Seidel gera uma seqüência que converge para a solução do
seguinte sistema, desde que as equações estejam devidamente arrumadas:
x1-3x2+x3=-2
-6x1+4x2+11x3=1
5x1-2x2-2x3=9
Prof .Jorge Roberto Grobe 30/03/2015 09:25:53 CN24NB
12 a EDIÇÃO
38
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
2.6.3 Exercicios
31) FRANCO (2008, p.194) Considere cada um dos seguintes sistemas lineares :
I)
x12x25x3=20
3x1−3x27x3=18
x16x2− x3=10 II) x13x2x3=10
10x1−2x27x3=27
4x1x22x3=12
a) sem rearranjar as equações, tente achar as soluções iterativamente, usando os métodos de
Jacobi e Gauss-Seidel, começando com
x o =1,001 , 2,01,3 ,01t .
b) rearranje as equações de tal modo que satisfaçam os critérios de convergência e repita o
que foi feito no item (a).
c)verifique suas soluções nas equações originais.
i) NOÇÕES DE MAL CONDICIONAMENTO
2.7 NOÇÕES DE MAL CONDICIONAMENTO
•
BARROSO ( 1987, p.74), para avaliar a precisão da solução
resíduo r =b− A∗̂x , onde
•
Se
x̂
x
do sistema Ax=b, o
é a solução computada.
x for uma boa aproximação para x , é esperado que as componentes de r seja
valores pequenos.
•
Valores pequenos para as componentes do resíduo podem não indicar que
x seja
uma boa aproximação para x.
Prof .Jorge Roberto Grobe 30/03/2015 09:25:53 CN24NB
12 a EDIÇÃO
39
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
32) a) Seja o sistema linear
x1+ 1,001x2=2,001
0,999x1+ x2=1,999
•
a solução exata do sistema [ 1;1] r=[0;0]
•
para
x =[2; 0,001] o resíduo r=[-0,00001; 0]
b)x1+ 1,001x2=2
0,999x1+ x2=1,999
solução: [-999;1000] resíduo=[0;0]
*o sistema é mal condicionado
c) Seja o sistema linear:
0,992x + 0,873y=0,119
0,481x+0,421y=0,060 solução :[1,-1]T
d) 0,992 x +0,873y=0,12 ( valor perturbado)
0,481x+0,421y=0,060
solução:[0,8154 ; -0,7891]
e) Uma matriz mal condicionada é a matriz de Hilbert.
Aij =
1
i j−1
Um modo de se detetar o mal condicionamento é através do determinante normalizado da
matriz dos coeficientes do sistema dado; se o determinante normalizado for sensivelmente
menor que a unidade, o sistema será mal condicionado.
Se A é uma matriz de ordem n , seu determinante normalizado, denotado por det(Norm A) é
dado por :
det norm A=
det A
1 2 ... n
onde
= i ,1 i ,2 i ,n
2
2
2
2.7.1 Norma Matricial
Segundo FRANCO (2008, p.16-17) , seja A uma matriz (nxn) . Define-se:
Prof .Jorge Roberto Grobe 30/03/2015 09:25:53 CN24NB
12 a EDIÇÃO
40
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
n
∥A∥∞ = máx ∑ ∣aij∣ ( norma linha)
1in j=1
2.7.1.1 Exercicios
33) Considere as matrizes
∥A∥∞
∥B∥∞
[ ]
2 1
A=
3 2
[ ]
3 2 1
B= 2 2 1
3 3 2
,
[
2 1
3 −1
4 3
8
2
C=
6 7 10 1
3 −1 0
1
]
, calcule
∥C∥∞ .
34)BURDEN (2003, p.372),seja a a matriz A=[1 2 1;0 3 -1;5 -1 1] calcule a ∥A∥∞ .
35)Seja o sistema linear x1+2x2+3x3=1
2x1+3x2 +4x3=-1
3x1+4x2+6x3=2
sendo dado
T
T
X =[0 ;−7 ; 5] solução geral e X =[−0,33 ;−7,9 ; 5,8] solução aproximada
∞ e∥A X −b∥∞ Respostas: 0,9 e 0,27.
calcule : ∥X − X∥
•
Para CLAUDIO (1989, p.79-84), seja um sistema sistema linear Ax=y e os vetores
soluções x1 e x2 duas aproximações exata para x.
•
Qual das aproximações é melhor?
•
Uma forma trivial seria calcular os resíduos dados por r1=y-Ax1 e r2=y-Ax2.
36)Seja o sistema linear:
0,24x+0,36y+,12z=0,84
0,12x+0,16y+0,24z=0,52
0,15x+0,21y+0,25z=0,64
e sejam x1=[25,-14,-1]T e x2=[-3,4,0]T
Os resíduos são :
[ 0 0 0,08] e [0,12 0,24 0,25]
Prof .Jorge Roberto Grobe 30/03/2015 09:25:53 CN24NB
12 a EDIÇÃO
41
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
A solução exata : [-3,4,1]T , embora modulo r1 < modulo de r2, a solução de x2 é melhor que
x1.
Conclusão:
Nem sempre a aproximação de menor resíduo é a melhor ou mais exata.
Um problema é dito mal condicionado se pequenas alterações nos dados de entrada
ocasionam grandes erros no resultado final.
Quando o sistema linear é 2x2 é fácil de verificar ( construção das retas) , mas quando
aumenta o tamanho do sistema é preciso um meio de medir este condicionamento.
Seja o sistema linear Ax=b e o sistema linear com alguma perturbação Ax=b’ . Então a
solução Ax=b’ é x’ .
Qual é a modificação em x , sabendo que b foi alterado para b’ .
Ax=b
A(x-x’)=b-b’
(x-x’)=A-1(b-b’)
Aplicando a norma de vetores, indicada por uma barra e a norma de matrizes indicada por
duas barras ∥.∥∞ .
Aplicando uma propriedade de norma de matrizes:
∣x −x '∣≤∥A−1∥∣b−b '∣ (1)
Divindo por |x|:
∣x −x '∣ ∥A−1∥
≤
∣b−b '∣
∣x∣
∣x∣
Pode-se escrever :
∥x∥≤∥A−1∥∥b∥
Prof .Jorge Roberto Grobe 30/03/2015 09:25:53 CN24NB
12 a EDIÇÃO
42
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
1 ∥A∥
≤
(2)
∥x∥ ∣b∣
Multiplicando as equações (1) e (2) ambos os membros.
∣x −x '∣
∣b−b '∣
≤∥A−1∥∥A∥
∣x∣
∣b∣
valor relativo provocado pela alteração fator
dos sistema linear de b para b’
de valor relativo de perturbação
ampliação
feita no sistema Ax=b
A definição de condicionamento é dado por:
cond (A)= ||A||* ||A-1||
FRANCO (2008, p.153) o cond (A) será considerado grande quando valer por volta de 10000
ou mais. Então o sistema será mal condicionado.
37)Sejam os sistemas lineares
a) x1+ 1,001x2=2,001
0,999x1+ x2=1,999
b)0,992x + 0,873y=0,119
0,481x+0,421y=0,060
calcule cond (A)= ||A||* ||A-1|| e verifique se os sistemas são mal ou bem condicionado.
38) ARENALES (2008, p.49) Considere o sistema linear :
[
][ ] [
][ ] [
] [
]
x1
x1
1
1
2
1
1
2
=
=
b)
1 1.00001 x 2
2.00001
1 1.00001 x 2 1.9999
resolva-os e calcule o condicionamento das matrizes e escreva se é mal ou bem condicionado.
a)
39) BURDEN ( 2003, p.402) O seguintes sistemas lineares Ax=b tem x como solução real e
∥b− A x̃ ∥
x̃ como soluçaõ aproximada. Calcule ∥x − x̃ ∥∞ ; K ( A)∞ ;
∥A∥∞
3,9 1,6 x 1 = 5,5
1
0,98
X=
X̃ =
a)
6,8 2,9 x 2
9,7
1
1,1
[
][ ] [ ]
[]
Prof .Jorge Roberto Grobe 30/03/2015 09:25:53 CN24NB
[ ]
12 a EDIÇÃO
43
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
b) x1 +2x2 =3
1,0001 x1 +2x2=3,0001
[]
X=
1
1
[ ]
0,96
X̃ =
1,02
J) MATRIZ INVERSA PELA ADJUNTA
. Cálculo da matriz C dos cofatores de A. Seja A, a matriz
, então a matriz C dos cofatores
de A é
Cofator Ai,j do elemento a11 (1):
Cofator Ai,j do elemento a12 (3):
Cofator Ai,j do elemento a21 (2):
Cofator Ai,j do elemento a22 (0):
De posse dos valores dos cofatores escrevemos a matriz C dos
cofatores:
Prof .Jorge Roberto Grobe 30/03/2015 09:25:59 CN24NB
12 a EDIÇÃO
44
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
3. Cálculo da matriz Adjunta de A.A matriz adjunta A é a transposta da matriz C dos cofatores, isto
é:
A = Ct
Portanto temos:
4. Cálculo da inversa A-1, pelo teorema
encontrados anteriormente no teorema temos:
Multiplicando
pelos elementos da matriz A, obtemos enfim a inversa de A.
fonte:http://www.infoescola.com/matematica/matriz-inversa-inversao-por-matriz-adjunta/
L) USANDO SOFTWARE MATEMÁTICO
2.8 APLICAÇÕES NA FERRAMENTA MATEMATICA
•
SOLUÇAO NO WXMAXIMA PELO COMANDO TRIANGULARIZE
•
INFORMA A MATRIZ MATRIZ AMPLIhADA DO SISTEMA.
(%i4) Matrix([2,3,1,-1,6.9],[-1,1,-4,1,6.6],[1,1,1,1,10.2],[4,-5,1,-2,-12.3])
•
LINHA DE COMANDO: triangularize(%i4);
(%o9)matrix([20,30,10,-10,69],[0,-2200,-200,0,-5220],[0,0,-6000,-16500,-87300
[0,0,0,-
322500,-1750500])
*a matriz fica tela em forma de matriz escalonada ou triangularizada.
Prof .Jorge Roberto Grobe 30/03/2015 09:26:00 CN24NB
12 a EDIÇÃO
45
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
* para resolver este sistema linear utilizando o comando TRIANGULARIZE , neste caso
precisa-se de uma calculadora.
EXERCICIO NUMERO 10
SOLUÇÃO 1:WXMÁXIMA
(%i2) algsys([x=2*t, x=4*z, y=z, 2*y=t], [x,y,z,t]);
(%o2) [[x=%r1,y=%r1/4, z=%r1/4,t=%r1/2]]
%r( variável livre que pode ser atribuida como w
t=w/2 z=w/4
y=w/4 x=w
SOLUÇÃO 2 : SCILAB
A=[1 0 0 -2;1 0 -4 0;0 1 -1 0; 0 2 0 -1]
b=[0;0;0;0]
X8=linsolve(A,-b)
* encontra apenas solução nula
disp('comando RREF ')
disp('matriz ampliada do sistema')
Ab8=[A8,b8]
disp('forma escada ')
X81=rref(Ab8)
[
1
0
0
0
0
1
0
0
0 −2 0
0 −0,5 0
1 −0,5 0
0
0
0
]
* a partir desta matriz na forma escada tem que resolver a mão este sistema linear.
SOLUÇÃO 1 : SCILAB COMANDO : linsolve
A=[ 2 -1 3;4 -3 2;1 1 1; 3 1 1]
b=[11;0;6;4]
X=linsolve(A,-b)
SOLUÇÃO 2 : SCILAB COMANDO : RREF
Prof .Jorge Roberto Grobe 30/03/2015 09:26:00 CN24NB
12 a EDIÇÃO
46
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
disp('comando RREF ')
disp('matriz ampliada do sistema')
Ab=[A,b]
disp('forma escada ')
X2=rref(Ab)
SOLUÇÃO 3 : WXMÁXIMA
COMANDOS: EQUAÇÕES/SISTEMAS LINEARES /NUMERO DE EQUAÇÕES/ DIGITAR
AS VARIÁVEIS
(%i1) linsolve([2*x-y+3*z=11, 4*x-3*y+2*z=0, x+y+z=6, 3*x+y+z=4], [x,y,z]);Dependent
equations eliminated: (4)(%o1) [x=-1,y=2,z=5]
* aqui é possível ver quando o sistema é possível e indeterminado, uma solução e impossível.
APLICAÇÕES NA FERRAMENTA MATEMATICA WXMAXIMA
•
(%i10) matrix([3,2], [1,6]);
•
(%o10) matrix([3,2],[1,6])
•
(%i11) lu_factor (%o10);
•
(%o11) [matrix([3,2],[1/3,16/3]),[1,2],generalring]
•
(%i12) get_lu_factors(%o11);
•
(%o12) [matrix([1,0],[0,1]),matrix([1,0],[1/3,1]),matrix([3,2],[0,16/3])]
APLICAÇÕES NA FERRAMENTA MATEMATICA SCILAB
>> A=[ 3 2;1 6]
>> [L,U,P]= lu(A)
*P=matriz permutação
2.5.2 Aplicações da Ferramenta Matematica Scilab
>>L =chol(A) * resultado matriz triangular superior e a matriz triangular inferior
fazer transposta: L'*L=B
2.5.3 Aplicações da Ferramenta Matematica wxmaxima
•
(%i12) matrix( [4,3], [3,8]);
•
(%o12) matrix([4,3],[3,8])
•
(%i13) cholesky (%o12);
•
(%o13) matrix([2,0],[3/2,sqrt(23)/2])
Prof .Jorge Roberto Grobe 30/03/2015 09:26:00 CN24NB
12 a EDIÇÃO
47
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
40) Exemplo: Uma matriz mal condicionada é a matriz de Hilbert
USANDO O WXMAXIMA:
(%i1) h [i, j] := 1 / (i + j - 1);
1
h := --------i, j i + j - 1
(%i2) genmatrix (h, 3, 3);
[ 1 1]
[1 - -]
[ 2 3]
[
]
[1 1 1]
(%o2)
[- - -]
[2 3 4]
[
]
[1 1 1]
[- - -]
[3 4 5]
(%o1)
fonte: http://maxima.sourceforge.net/docs/manual/pt/maxima_25.html
Função: mat_cond (M, 1)
Função: mat_cond (M, inf)
•
•
Retorna o número condiciona da norma de ordem p da matriz m.
Os valores permitidos para p são 1 e inf.
•
Essa função utiliza a factorização linear alta para inverter a matriz m.
•
Dessa forma o tempo de execução para mat_cond é proporcional ao cubo do tamanho
da matriz;
•
lu_factor determina as associações baixa e alta para o número de condição de norma
infinita em tempo proporcional ao quadrado do tamanho da matriz.
•
(%i6) matrix( [1,2], [5,9]);
Prof .Jorge Roberto Grobe 30/03/2015 09:26:00 CN24NB
12 a EDIÇÃO
48
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
•
(%o6) matrix([1,2],[5,9])
•
(%i7) mat_cond(%o6,1);
•
(%o7) 154
•
(%i8) mat_cond(%o6,inf);
•
(%o8) 154
•
a principio esta calculando a norma infinita pelas linhas
•
ou
•
mat_norm(A,inf); norma infinita das linhas
APLICAÇÕES NA FERRAMENTA MATEMATICA SCILAB
-->A=[1 2; 5 9]
A =
1.
2.
5.
9.
-->cond(A)
ans = 110.99099
Prof .Jorge Roberto Grobe 30/03/2015 09:26:00 CN24NB
12 a EDIÇÃO
49
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
REFERÊNCIAS
•
ARENALES, Selma Helena de Vasconcelos; DAREZZO, Artur (Autor). Cálculo
numérico: aprendizagem com apoio de software. São Paulo, SP: Thomson
Learning, 2008. x, 364 p.
•
KOLMAN, Bernard. Introdução à Álgebra Linear Com Aplicações. 6a edição. RJ.
Editora LTC.1999.
•
BARROSO, L.C. et. al. Cálculo Numérico(com aplicações) 2.ed. SP. Editora
Harbra.1987.
•
BURDEN, R.L e FAIRES, J.D. Analise Numérica. Pioneira Thomson Learning.
2003.
•
LAY, D. C. Algebra Linear e suas aplicações.2a edição Editora LTC.RJ. 1999.
•
PERESSINI, A. L.et .al. The Mathematics of Nonlinear Programing.USA.1988.
•
CLAUDIO, D.M e MARINS, J.M.Calculo Numérico Computacional.Teoria e
Pratica.Editora Atlas.SP.1989.
•
LEON, Steven J. Álgebra linear com aplicações. 8. ed. Rio de
Janeiro, RJ: LTC, 2011. xi, 451p. ISBN 85-216-1150-1.
•
STEINBRUCH, A; WINTERLE, P. Álgebra Linear.2.ed. SP.McGRaw-Hill.1987.
•
BOLDRINI, L. J.et.al. Algebra Linear. 3a edição. SP. Editora Harbra. 1980.
•
BATSCHELET, E. Introdução A Matemática para Biocentistas. SP.Editora da
Universidade de São Paulo.1978.
•
Disponivel em
MetodosNumericoseEstatisticos/MNEaula04.ppt
acessado em
16/02/2009.
•
Disponivel
em
http://maxima.sourceforge.net/docs/manual/pt/maxima_25.html,
acessado em 17/09/2009.
•
FRANCO, Neide Bertoldi. Cálculo numérico. São Paulo, SP: Pearson Prentice Hall,
2009. xii, 505 p. ISBN 8576050870.
•
disponível
em
www.dsc.ufcg.edu.br/~cnum/.../CN_Sistemas_%20Parte2.ppt
acessado em 31/03/2011.
Prof .Jorge Roberto Grobe 30/03/2015 09:26:00 CN24NB
12 a EDIÇÃO
50
-,
MINISTÉRIO DA EDUCAÇÃO
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS PATO BRANCO
Curso das Engenharias
•
GILAT, Amos; SUBRAMANIAM, Vish. Métodos numéricos para engenheiros e
cientistas: uma introdução com aplicações usando o MATLAB . Porto Alegre:
Bookman, 2008. 479 p
•
Disponível
em
http://www.monografias.com/trabajos92/factorizacion-
matrices/image023.png, acessado em 01/11/2013.
•
fonte:http://www.infoescola.com/matematica/matriz-inversa-inversao-por-matrizadjunta/ , acessado em 16/04/2014.
•
Disponível em
http://www.ctec.ufal.br/professor/enl/metnum/condicao_para_convergencia.htm,
acessado em 01/09/2014.
Prof .Jorge Roberto Grobe 30/03/2015 09:26:00 CN24NB
12 a EDIÇÃO
51