TRABALHO DE INSTRUMENTAÇÃO E CONTROLE
1 INTRODUÇÃO
Este trabalhos apresenta, sumariamente, as ações básicas de controle e os modelos de
controle bem como os elementos finais de controle de um processo.
Qualitativamente, o desempenho de um controlador pode ser avaliado pela sua capacidade
de manter a variável controlada próximo ao valor desejado (setpoint), mesmo em presença de
perturbações externas.
Em aplicações práticas, porém, pode ser desejável "medir" o desempenho de um controlador por
meio de um índice que permita buscar melhoras de desempenho.
Alguns índices sugeridos na literatura e na prática são dados a seguir. Em geral, eles consideram a
resposta do controlador a uma perturbação em degrau.
• coeficiente de amortecimento, obtido ao comparar a resposta do controlador à de um sistema
de segunda ordem; Luyben, por exemplo, recomenda um valor entre 0,3 e 0,5;
• overshoot, ou seja, o máximo desvio do setpoint observado logo após a perturbação;
• velocidade de resposta, definida como o tempo necessário para atingir o setpoint (não
necessariamente se estabilizando no setpoint);
• taxa de decaimento, medida como a razão entre as amplitudes de duas oscilações sucessivas;
• tempo de resposta, considerado como o tempo a partir do qual as oscilações se limitam a
uma certa fração (geralmente 5%) da mudança de setpoint;
• diversos índices calculados por integração de uma função do erro ao longo do tempo: ISE
(integral do quadrado do erro), IAE (integral do valor absoluto do erro) ou ITAE (integral do
produto entre tempo e valor absoluto do erro).
Além disso, os conceitos de automação e controle estão intimamente ligados à pneumática e
eltroeletrônica, pois esta área da tecnologia possui dispositivos capazes de anglobar as mais diversas
áreas.
No que diz respeito aos elementos finais de controle, pode-se dizer que estes apresentam
importância relevante nos processos, uma vez que são responsáveis diretos pela modificação dos
valores da variável de processo controlada. Exemplos de elementos finais de controle são resistência
elétrica, motores, atuadores pneumáticos e válvulas de controle.
II) AÇÕES DE CONTROLE E MODELOS DE CONTROLE
1- Controlador Liga-Desliga (ON-OFF)
Num sistema de controle tipo Liga-Desliga (ON-OFF), o elemento de atuação possui apenas
duas posições, ou seja, o dispositivo fornece apenas dois valores na saída.
A
grande
utilização deste tipo de controlador pode ser justificada pela simplicidade da sua construção e pelo
seu baixo custo.
O controlador Liga-Desliga pode ser equacionado da seguinte forma. Seja u(t) o sinal de
saída do controlador e e(t) o sinal de entrada. O sinal de saída u(t) permanece no valor máximo ou
mínimo, dependendo se o valor do erro é positivo ou negativo, de tal forma que:
onde U1 e U2 são constantes. O valor mínimo de U2 é em geral zero ou -U1.
Tais controladores são em geral implementados através de dispositivos elétricos,
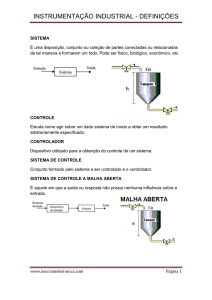
principalmente válvulas solenóides. As Figuras 1 -(a) e (b) ilustram o diagrama de blocos de
controladores Liga-Desliga. A Figura 1-(b) ilustra o diagrama de bloco de um controlador LigaDesliga sujeito a um intervalo diferencial. Neste caso, a saída do controlador u(t) se mantêm com o
valor presente até que a entrada e(t) sofra uma variação equivalente ao intervalo diferencial. Muitas
vezes, o intervalo diferencial é resultado de atritos e folgas não intencionais, mas mais
frequentemente trata-se de uma característica intencional para evitar uma freqüência de
chaveamento excessiva do dispositivo que pode comprometer a sua vida útil.
Figura 1: (a) Diagrama de blocos de um controlador Liga-Desliga - (b) Diagrama de blocos de um
controlador Liga-Desliga com intervalo diferencial.
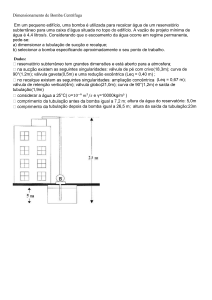
A Figura 2 ilustra um sistema de controle do nível de um líquido, onde uma válvula
eletromagnética controla a altura do líquido h no tanque através da variação do fluxo de entrada de
água qi. O tanque pode ser esvaziado através de uma válvula que controla o fluxo de saída. A
válvula possui somente dois estados: aberta ou fechada. Desta forma, o fluxo de entrada de água qi
é constante ou nulo.
Figura 2: (a) Sistema de controle de nível - (b) Válvula eletromagnética.
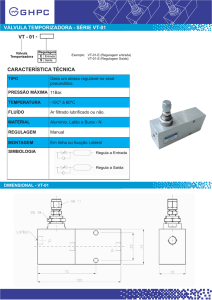
Figura 3: Nível de líquido h(t).
A Figura 3 ilustra a altura do líquido h variando entre os dois valores limites que acionam a
mudança de estado da válvula eletromagnética. Note que o valor da altura h segue uma das duas
curvas exponenciais que correspondem a curva para o enchimento do tanque e para o esvaziamento
do tanque. Ainda na mesma figura, é possível concluir que a amplitude de oscilação pode ser
reduzida através da redução do intervalo diferencial. Isto no entanto, tem como conseqüência um
aumento da freqüência de chaveamento da válvula comprometendo sua vida útil. A magnitude do
intervalo diferencial deve ser determinado considerando um balanço entre a precisão e o tempo de
vida do componente.
3
Controlador Proporcional (P)
4
Para um controlador com ação de controle proporcional a relação entre a ação de controle
u(t) e o erro de atuação e(t) é dado por:
ou expresso na variável de Laplace como:
onde Kp é denominado constante proporcional.
O diagrama de bloco deste tipo de controlador está ilustrado na Figura 4.
Figura 4: Diagrama de blocos de um controlador proporcional.
3- Controlador Integral (I)
Na ação de controle integral, o valor da ação de controle u(t) varia proporcionalmente ao
sinal de erro e(t):
Ou,
A sua função de transferência pode ser representada como:
Se o valor de e(t) dobra, então o valor de u(t) varia duas vezes mais rápido. Se e(t) = 0 o
valor de u(t) permanece estacionário.
O diagrama de bloco deste tipo de controlador está ilustrado na Figura 5.
Figura 5: Diagrama de blocos de um controlador integral.
4- Controlador Derivativo (D)
O controle apenas derivativo não seria viável, pois não responderia ao sinal de erro, mas
somente à sua tendência de variação.
Quando somada a saída proporcional do amplificador com a do diferenciador, ambos tendo
o sinal de erro na entrada, temos o controlador proporcional e derivativo.
A vantagem deste controle é a velocidade de resposta, que se deve à imediata reação do
diferenciador: inicialmente, o erro é grande, e o diferenciador fornece um sinal forte ao atuador, que
provoca rápida variação na grandeza controlada, à medida que o erro vai diminuindo, o
diferenciador apresenta uma saída menor (de acordo com a velocidade de variação na grandeza),
reduzindo a ação do atuador, o que evita que se passe (ou passe demais) do valor desejado (entrada).
A desvantagem é que o diferenciador é um circuito muito susceptível a ruídos de alta
freqüência, pois é um filtro passa-altas, o que pode levar a distúrbios durante o processo de controle.
A ação de controle proporcional-derivativa é definida como:
e a função de transferência é dada por:
onde a constante KP é o ganho proporcional e a constante TD é denominada tempo
derivativo.
A ação de controle derivativa fornece uma ação de controle proporcional à derivada do erro.
O tempo derivativo Td é o intervalo de tempo que a ação de controle derivativa antecede a ação de
controle proporcional.
A Figura 6 ilustra o diagrama de blocos do controlador PD e a o gráfico saída do
controlador u(t) caso a entrada e(t) seja uma rampa unitária.
Figura 6 : (a) Diagrama de blocos de um controlador PD - (b) entrada e(t) como rampa
unitária - (c) saída do controlador u(t).
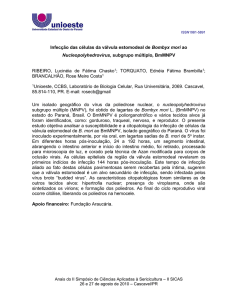
Efeitos da ação de controle integral e derivativa
Se para um sistema de controle de uma planta que não possui um integrador 1=s for
utilizado um controlador proporcional, um erro estacionário ou offset ocorrerá para uma entrada do
tipo degrau. Este erro estacionário pode ser eliminado caso seja utilizado uma ação de controle
integral.
Na ação de controle integral, o sinal de controle u(t) é equivalente a área do gráfico do sinal
de erro e(t) até o instante t. Desta forma, o sinal de controle u(t) pode ter um valor diferente de zero
mesmo que o erro e(t) seja equivalente a zero. como ilustrado na Figura 7-(a) Isto é obviamente
impossível para o caso de controle proporcional. A Figura 7-(b) ilustra o gráfico do sinal de controle
u(t) e o correspondente do sinal de e(t) para ocaso de controle proporcional. Note que a ação de
controle integral apesar de remover o offset pode levar o sistema a ter um comportamento
oscilatório de amplitude decrescente ou até crescente o que é indesejável.
Figura 7: (a) Gráficos de e(t) e u(t) mostrando erro nulo para ação de controle não nula
(ação integral) - (b) Gráfico de e(t) e u(t) mostrando erro nulo quando a ação de controle
também é nula (ação proporcional).
5- Controladores Pneumáticos
Empregado na automação de diversas instalações, propicia funcionalidade em variadas
aplicações com controle permanente de operação.
Para alcançar o seguimento da força no subsistema pneumático propõe-se a lei de controle:
onde ua é um sinal de controle auxiliar, KP é uma constante positiva, A é a área do pistão e s é o
erro definido.
A dinâmica do subsistema pneumático em malha fechada:
O projeto do sinal ua e da constante KP é baseado na função escalar não negativa V2:
Obtém-se a derivada ao longo das trajetórias em malha fechada do subsistema pneumático:
Definindo o sinal de controle auxiliar no caso ideal como
resulta
No caso ideal, a expressão resulta
6- Controles eletroeletrônicos:
Alimentação dos Instrumentos
A energia está associada aos instrumentos de dois modos: através da alimentação e do
método de transdução. Qualquer instrumento para funcionar necessita de uma fonte de energia. Esta
fonte de energia pode ser externa e explícita, quando o instrumento é alimentado.
As duas fontes clássicas de alimentação de instrumentos são a eletrônica e a pneumática.
Instrumentos eletrônicos são alimentados por uma fonte externa de voltagem, típica de 24 V cc.
Esta alimentação geralmente é feita por um único par de fios que simultaneamente conduz a
informação e a alimentação.
Por questão econômica e de segurança, raramente se usa um instrumento de medição no
campo alimentado com uma bateria integral (colocado no seu interior).
Instrumentos pneumáticos são alimentados por uma fonte externa de ar comprimido, típica
de 140 kPa (20 psi). Cada instrumento pneumático montado no campo é alimentado
individualmente através de um conjunto filtro-regulador ajustável ou fixo. O filtro elimina, num
estágio final, as impurezas, umidade e óleo contaminantes do ar comprimido. O regulador, ajustável
ou fixo, geralmente abaixa a pressão mais elevada de distribuição para o valor típico de 140 kPa. O
sinal padrão de transmissão pneumática é de 20 a 100 kPa.
Existem ainda instrumentos de montagem local que não necessitam de nenhuma alimentação
externa para seu funcionamento. Eles são chamados de autoalimentados. Eles utilizam a própria
energia do processo para seu funcionamento.
Exemplos de indicadores e registradores que não necessitam de alimentação externa são:
1. indicador local de pressão, com elemento sensor tipo bourdon C, helicoidal, espiral,
helicoidal ou fole.
2. indicador local de temperatura com elemento sensor tipo bimetal.
3. indicador ou registrador local de vazão com elemento sensor de pressão diferencial
(diafragma).
Pneumático ou Eletrônico
Os instrumentos de medição e controle necessitam de uma fonte de energia externa para o
seu funcionamento adequado. Dependendo da natureza desta fonte de energia, os instrumentos
podem ser classificados em:
1. pneumáticos, onde estão incluídos os puramente mecânicos.
2. eletrônicos, ou também chamados de elétricos.
Ambos os tipos de instrumentos podem executar as mesmas funções, apresentando
vantagens e desvantagens, quando comparados. Esta comparação já foi clássica, na década de 1970,
mas hoje há uma predominância da instrumentação eletrônica sobre a analógica.
A escolha entre pneumático ou eletrônico não é apenas a escolha de um instrumento isolado,
mas de todo um sistema de instrumentação de controle do processo. A escolha pode depender do
tipo de processo e das variáveis envolvidas.
A escolha do sistema de instrumentação influi e implica na definição de outros
equipamentos e sistemas. Ou seja, quando se escolhe uma instrumentação pneumática, há a
necessidade de se ter um compressor de ar de instrumento, de capacidade adequada à quantidade de
instrumentos, com filtros, secadores, estágios de redução e todo um sistema de interligações e
distribuição através de tubos plásticos ou de cobre.
Quando se escolhe uma instrumentação eletrônica, deve-se considerar o sistema de
alimentação elétrica, com eventual opção de reserva de bateria para suprir a energia na falta da
alimentação alternada principal. Mesmo com toda a instrumentação eletrônica, deve ser considerado
o uso do compressor de ar de instrumento, para alimentar, no mínimo, os transdutores I/P, pois as
válvulas de controle são atuadas pneumaticamente.
Instrumento pneumático
O instrumento pneumático é aquele que necessita, para seu funcionamento, da alimentação
de ar comprimido, pressão típica de 120 kPa (20 psig). O sinal padrão de informação pneumática é
o de 20 a 100 kPa (0,2 a 1,0 kgf/cm2 ou 3 a 15 psi).
O dispositivo para gerar o sinal padrão é o conjunto bico palheta. A distância entre o bico
que sopra e a palheta que se move em função da variável medida modula o sinal de saída entre 20 e
100 kPa. O dispositivo para detectar o sinal padrão é o fole receptor.
Mesmo com o uso intensivo e extensivo de instrumentos eletrônicos, ainda hoje se usa muito
a válvula de controle com atuador pneumático. Por sua simplicidade, confiabilidade e economia, a
válvula de controle com atuador pneumático ainda será usada como elemento final de controle
padrão por muitos anos.
Instrumento eletrônico
O instrumento eletrônico é alimentado por energia elétrica, geralmente de 24 Vcc. Mesmo
quando ele é alimentado pela linha alternada de 120 Vca, seus circuitos internos a semicondutores
necessitam de corrente contínua para sua polarização e portanto todos os instrumentos possuem uma
fonte de alimentação integralizada.
O sinal padrão para a transmissão de corrente eletrônica é 4 a 20 mA cc. Já foi usado o sinal
de 10-50 mA cc, porém, por causa da segurança e compatibilidade com computadores digitais, ele
desapareceu.
Existe também o sinal padrão de transmissão de 1 a 5 Vcc, porém ele não é adequado para
grandes distancias, pois a resistência parasita da fiação atenua o sinal transmitido.
A alimentação dos instrumentos eletrônicos de campo é feita através do
mesmo par de fios que conduz o sinal padrão de informação. Tais transmissores
são chamados de 2-fios. Pretendeu-se diminuir o sinal padrão para faixa menor que 4 a 20 mA, para
que a alimentação fosse de 5 Vcc, porém, isso não se realizou.
Atualmente, quando se tem todo o sistema digital, a transmissão é feita digitalmente. Ainda
não há um protocolo padrão de transmissão digital e os fabricantes usam os seus protocolos
proprietários, como HART, da
Fisher- Rosemount, FOXCOM, da Foxboro. Em outubro de
1996 deverá ser assinado uma tentativa de padronização do Fieldbus.
O instrumento eletrônico pode ser uma fonte de energia e por isso ele não é
seguro, a não ser que sejam tomados cuidados especiais de fabricação e instalação. Ele deve possuir
uma classificação elétrica especial, compatível com a classificação de área do local onde ele vai
operar.
Há basicamente dois tipos de instrumentos eletrônicos: à base de corrente
e à base de tensão. As características dos instrumentos à base de corrente são:
1. todos os instrumentos devem ser ligados em serie. Para garantir a integridade do sistema,
devem existir dispositivos de proteção que possibilitem a retirada ou colocação de componentes da
malha, sem interrupção ou interferência de funcionamento. Caso não haja essa proteção, quando um
instrumento da malha é retirado, ou mesmo se estraga, toda a malha fica desligada.
2. a ligação em serie também influi no valor máximo da impedância da malha. A malha de
instrumentos à base de corrente, onde todos são ligados em serie, a soma das impedâncias de
entrada de todos os instrumentos é limitada por um valor máximo, que é função geralmente do nível
de alimentação da malha. Desse modo, é limitado o número de instrumentos ligados em serie numa
malha. Quando esse limite é ultrapassado, a solução é usar o instrumento repetidor de corrente,
também chamados, casadores de impedância.
3. as impedâncias de entrada dos instrumentos são baixas (dezenas a centenas de ohms) e
portanto as correntes circulares são relativamente elevadas (mA). Isso equivale a dizer que o
consumo de energia é elevado e há grande dissipação de calor. As características dos instrumentos à
base de tensão são:
a) todos os instrumentos são ligados em paralelo. Os diagramas de ligação, como
conseqüência, são mais simples, pois podem ser unifilares.
b) os componentes apresentam alta impedância de entrada, de modo que a
retirada, colocação ou defeito dos no seu funcionamento normal.
c) como os instrumentos possuemaltíssimas impedâncias de entrada (MΩ) as correntes
circulantes são baixíssimas (µA ou pA). O nível de energia dissipada é baixo e o calor dissipado é
desprezível.
Como recomendação: utiliza-se instrumento à base de corrente para a transmissão de sinais,
pois não há problemas de atenuação com as distancias envolvidas e utiliza-se o sistema com
instrumentos à base de tensão para a manipulação local dos sinais, dentro do painel, para usufruir
das vantagens de baixo consumo, baixa dissipação de calor, facilidade de ligações, flexibilidade de
conexões.
Analógica Pneumática
A primeira onda aconteceu no inicio da instrumentação, cerca de 1940, com a
instrumentação pneumática. A instrumentação analógica pneumática foi uma evolução natural da
instrumentação mecânica.
Os primeiros instrumentos mecânicos eram de uso local, ligados diretamente ao processo e
serviam apenas para fornecer indicações e registros locais para a (difícil) monitorização do
processo, pelos operadores espalhados por toda a área da planta.
Com a criação do sinal padrão de 3 a 15 psig (20 a 100 kPa), foi possível a centralização do
controle, em salas específicas. Todas as funções necessárias para o operador eram facilmente
disponíveis, tais como indicação, registro, transmissão, computação analógica, alarme e controle.
As distâncias envolvidas tipicamente não excediam a 300 metros, porém se obteve o controle
satisfatório
para as exigências da época da maioria absoluta dos processos industriais.
Os instrumentos pneumáticos, com a exceção das plantas de pequeno porte e das que já os
utilizam, deixaram de ser usados intensamente. A sua fabricação tornou-se muito cara, quando
comparada com a dos instrumentos eletrônicos digitais, principalmente por causa de sua demanda
cada vez mais reduzida.
Analógica Eletrônica
Esta onda aconteceu entre 1945 e 1965 e é devida ao aparecimento do sinal padrão
eletrônico de 4 a 20 mA cc (o primeiro sinal de 10 a 50 mA cc teve vida curta) e ao aparecimento
dos instrumentos eletrônicos analógicos miniaturizados, que efetivamente possibilitaram o uso
definitivo da sala de controle centralizada, com grande densidade de instrumentos.
Todas as funções necessárias de indicação, registro, transmissão, computação analógica,
alarme e controle foram aperfeiçoadas, o tempo de resposta diminuiu sensivelmente, a flexibilidade
aumentou, a distância de transmissão passou para até 3000 m.
Embora seja tecnicamente possível distancias maiores, na prática, esta é a máxima distância
para transmissão com fio; distâncias maiores envolvem a técnica de telemetria. Com o sinal padrão
eletrônico tornou-se possível a manipulação de até quatro ou cinco sinais simultâneos, quando no
pneumático só se manipulavam dois sinais de cada vez.
Sob o ponto de vista de controle, as instrumentações analógicas pneumática e eletrônica
foram caracterizadas pela analise do comportamento dinâmico da malha de controle, cujo principal
objetivo era a determinação das condições de estabilidade e a implementação dos algoritmos de
controle, como o clássico PID. Os resultados obtidos eram satisfatórios e estes tipos de
instrumentação, analógica pneumática e eletrônica, foram aplicados intensivamente na indústria
petroquímica, nas refinarias de petróleo e nas plantas de papel e celulose. Porém, alguns limites
foram também reconhecidos:
1. a precisão e os recursos dos equipamentos analógicos são limitados,
2. a instrumentação analógica é pouco flexível; sua reconfiguração requer mudança de fiação
(hardwire) ou de equipamento (hardware), de engenharia (mindware), leva tempo e custa caro.
3. há problemas com a estabilidade do sistema, quando existem perturbações ou variações de
carga freqüentes no sistema controlado.
4. há problemas com a linearidade dos sistemas de controle; a maioria dos processos
apresenta ganhos variáveis com a carga e com o ponto de trabalho.
Todos os problemas e dificuldades referentes ao controle implicaram no desenvolvimento de
teorias matemáticas para diminui-los ou elimina-los, como os critérios de estabilidade de Routh,
Hurwitz, Liapunov, transformada de Laplace e transformada Z. Estas teorias matemáticas
envolviam equações transcendentais, que eram pouco entendidas pelo pessoal de instrumentação,
mesmo com formação acadêmica.
III) ELEMENTOS FINAIS DE CONTROLE
1- Válvulas de Controle
O elemento final de controle mais utilizado na indústria química é a válvula de controle.
Basicamente, a válvula de controle é uma válvula capaz de variar a restrição ao escoamento de um
fluido em resposta a um comando recebido na forma de um sinal padrão.
A válvula de controle é a versão industrial da torneira (bem mais sofisticada) que temos em
casa, acrescida de um atuador, que permite sua abertura via um sinal eletrônico. Ou seja, o sinal
eletrônico contendo ação de controle do processo que vem da sala de controle é conectado à válvula
de controle via um cabo de sinal eletrônico. Na válvula este sinal possibilita a abertura / fechamento
gradual, de forma a proporcionar a ação de controle desejada sobre a variável de processo a ser
controlada.
Em geral, o movimento da haste da válvula é obtido pelo balanço entre duas forças: a tensão
de uma mola ligada à haste (função da posição da haste), e a força exercida sobre um diafragma na
cabeça da válvula (função da pressão de ar na cabeça da válvula). O comando da válvula é feito pela
variação da pressão de ar fornecido à válvula.
Atualmente, é comum encontrar válvulas com posicionadores eletropneumáticos, que permitem que
o sistema de controle envie um sinal de 4 a 20 mA diretamente para a válvula. Em outros sistemas,
o sinal eletrônico deve ser convertido em um sinal pneumático por meio de um conversor I/P.
Um dos aspectos importantes na especificação de uma válvula de controle é a sua posição de
falha, ou seja, sua posição na ausência do sinal de controle externo. Esta especificação é geralmente
ditada pela segurança do processo. Em algumas aplicações, como no suprimento de vapor para um
aquecedor, é desejável que a válvula feche na falta de um sinal de comando: esta válvula é chamada
de falha-fecha, ou ar-para-abrir. Em outras situações, a segurança do processo exige a abertura da
válvula em caso de falha do sistema: falha-abre, ou ar-para-fechar.
O tamanho da válvula é normalmente dado por um coeficiente de tamanho, Cv. Este
coeficiente é determinado experimentalmente pela passagem de fluido pela válvula. Para líquidos
sem flasheamento, por exemplo, a vazão através da válvula é dada por:
onde F é a vazão; x é a posição da haste da válvula expressa em percentagem da abertura;
f(x) representa a fração da vazão máxima (em função da posição da válvula).
A função f(x) representa uma propriedade importante da válvula, a sua característica
inerente. A característica da válvula é determinada por diversos fatores, especialmente formato do
obturador e do assento. São comuns na indústria as válvulas de característica linear, onde f(x) = x, e
as de característica de igual percentagem, nas quais f(x) = ax-1, onde a é um parâmetro com valor
entre 20 e 50 dependendo do projeto da válvula.
O dimensionamento de válvulas de controle deve levar em conta a faixa de controlabilidade
desejada. A queda de pressão na válvula, usada no cálculo do Cv, depende da abertura da válvula e
de outros fatores referentes a condições de escoamento (outros equipamentos em série, etc.).
2- Atuadores
Atuadores são elementos finais de controle, que tem por objetivo reposicionar uma variável,
de acordo com um sinal gerado por um controlador.
Eles atuam diretamente no processo, modificando as suas condições.
São dispositivos utilizados para conversão de sinais elétricos provenientes dos
controladores, em ações requeridas pelos sistemas que estão sendo controlados.
Atuadores Pneumáticos:
Normalmente empregado em sistemas onde se requer altas velocidades nos movimentos,
com pouco controle sobre o posicionamento final, em aplicações onde o torque exigido é
relativamente baixo.
• Lineares - Pistões de simples e dupla ação.
• Rotativos - Motores pneumáticos.
Atuadores Hidráulicos:
Utilizados principalmente em sistemas onde são requeridos elevados torques, sobretudo no
acionamento de máquinas de grande porte e em robôs de alta velocidade de
posicionamento.
Comandado por eletroválvulas que controlam os fluxos de óleo do sistema, controlando os
movimentos.
• Alto torque desenvolvido
• Alta relação torque/peso
• Alta performance
• Baixa manutenção
Atuadores Elétricos:
• Motor de passo:
-Baixo Torque
-Acionamento simples
-Baixa relação peso/potência.
São comumente utilizados, hoje, em sistemas que operam e malha aberta, não exigindo a
presença de sensores ou controladores mais elaborados.
Sua maior aplicação está em periféricos para informática.
Atuadores Elétricos:
• Motor de Corrente Contínua: Tendo um desempenho muito superior ao motor de passo,
o motor CC o substituiu em algumas aplicações , pois seu acionamento e controle também são
bastante simples.
• Motor de corrente alternada síncrono:
• Motor de corrente alternada assíncrono (de indução): Largamente utilizado em acionamentos onde
controles de velocidade e posicionamento não são requeridos, devido ao
seu baixo custo e robustez.
3- Posicionadores
Os posicionadores são elementos destinados a localizar, fechar, travar, centralizar peças. Por
serem compactos, são ainda facilmente utilizados nas aplicações que necessitam uma mola (por
exemplo – pino extrator). São constituídos por um corpo com rosca, que contém uma mola e um
pino ou uma esfera. A mola pressiona o pino continuamente.
Quando utilizado como localizador, deve-se fazer uma rosca onde o posicionador será aplicado. Na
outra peça deve ser feito um furo que recebe a esfera ou pino do posicionador. O sistema permite
certa regulagem da força necessária para deslocar a peça localizada. Isto é obtido rosqueando mais
ou menos o posicionador.
São fornecidos três modelos básicos:
com esfera (K)
com pino (B)
retrátil (R)
Os posicionadores pneumáticos e eletro-pneumáticos permitem a operação de pequenos
atuadores em situações de pressões diferenciais elevadas, eliminam erros e aumentam a velocidade
de atuação. Controladores de anel simples para montagem em painel, indicados para um ou
múltiplos valores de controle.
1 IV) CONCLUSÃO
Controle de processos é uma das inúmeras tecnologias que podem e estão sendo aplicadas
para obter melhoramentos no desempenho operacional. Muitas companhias já reconhecem
que existe um grande retorno econômico com a aplicação desta tecnologia, desde a simples
sintonia de malhas até a implementação de controladores avançados, baseados em modelos.
1 V) BIBLIOGRAFIA
Maruyama, Newton; Ações de Controle básicas
www.poli.usp.br
www.wikipédia.com.br
www.li.facens.br/eletronica
Orlandi, José Geraldo; Elementos finais de Controle