Instituto Superior de Engenharia do Porto
Departamento de Engenharia Electrotécnica
Licenciatura em Engenharia Electrotécnica e de Computadores
SISEL - Sistemas Electromecânicos
Exercícios de
Motores eléctricos em sistemas de controlo
2006
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo
1. Considere as zonas limite de funcionamento da característica T(ω) (binário motor T versus velocidade angular
ω) de um motor DC de excitação separada com binário e velocidade nominais, Tn e ωn, respectivamente. As
figuras A e B representam duas eventuais possibilidades com zonas de funcionamento a velocidades inferior e
superior à velocidade nominal ωn. A sombreado está representada a zona interdita de funcionamento devido a
excederem-se os limites nominais.
T
Figura A
T
Tn
Figura B
Tn
zona A1
zona A2
ω
ωn
0
zona B2
zona B1
ω
ωn
0
Então, pode afirmar-se que o gráfico correcto está representado:
A) A Figura A está correcta e a Figura B está incorrecta
B) As Figuras A e B estão ambas correctas
C) A Figura A está incorrecta e a Figura B está correcta
D) As Figuras A e B estão ambas incorrectas
2. Considere as zonas limite de funcionamento da característica T(ω) (binário motor T versus velocidade angular
ω) de um motor DC de excitação separada controlado pela armadura (i.e. com excitação constante) com binário
e velocidade nominais, Tn e ωn, respectivamente. As figuras A e B representam duas eventuais possibilidades
com zonas de funcionamento a velocidades inferior e superior à velocidade nominal ωn. A sombreado está
representada a zona interdita de funcionamento devido a excederem-se os limites nominais.
T
Figura A
T
Tn
Figura B
Tn
zona A1
0
ωn
zona B2
zona B1
zona A2
ω
0
ωn
ω
Então, para o tipo de controlo efectuado, o sistema pode trabalhar na:
A) Zona A1
B) Zona B1
C) Zona A2
D) Zona B2
1
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo
3. Considere o sistema de controlo de velocidade de motor DC representado na figura. Sejam Una, Tn e ωn, a
tensão nominal na armadura, o binário motor nominal e a velocidade nominal do motor DC, respectivamente.
Nesta situação a região de funcionamento do motor (no plano binário motor T versus velocidade angular ω)
encontra-se no:
A) 1º Quadrante
B) 2º Quadrante
C) 1º e 2º Quadrantes
D) 1º e 4º Quadrantes
4. Considere o sistema de controlo de velocidade de motor DC representado na figura. Sejam Una, Tn e ωn, a
tensão nominal na armadura, o binário motor nominal e a velocidade nominal do motor DC, respectivamente.
T
+Tn
-ωn
2ºQ
1ºQ
3ºQ
4ºQ
rede
3~
+ωn
Ia
Conversor
AC → DC
ω
iF=const.
+
Ua
T, ω
−
-Tn
Suponha um conversor AC→DC tal que –Una ≤ Ua ≤ +Una permitindo a circulação de corrente eléctrica num só
sentido (i.e., Ia ≥ 0). Nesta situação a região de funcionamento do motor (no plano binário motor T versus
velocidade angular ω) encontra-se no:
A) 1º e 4º Quadrantes
B) 1º e 2º Quadrantes
C) 2º Quadrante
D) 1º Quadrante
5. Considere o sistema de controlo de velocidade de motor DC representado na figura.
rede
3~
+
Conversor
AC → DC
iF
Ua
−
T, ω
Conversor
AC → DC
rede
3~
Sejam Una e ωn, respectivamente a tensão nominal na armadura e a velocidade nominal do motor DC. Então,
para iF constante, variando a tensão tal que Ua < Una aplicada pelo conversor AC → DC à armadura do motor
resulta:
B) Uma velocidade ω < ωn
A) Uma velocidade ω > ωn
C) A tensão Ua não tem influência em ω
D) Outro resultado
2
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo
6. Considere o sistema de controlo de velocidade de motor DC representado na figura. Sejam {Uan, Ian} e {Tn ,ωn}
respectivamente, a tensão e a corrente nominais na armadura e o binário e a velocidade nominal.
rede
3~
iA
iF=const
+
Conversor
AC → DC
Ua
T, ω
−
Suponha um conversor AC → DC tal que −Uan ≤ Ua ≤ +Uan, −Ian ≤ iA ≤ +Ian e que a corrente de excitação iF é
mantida constante no valor nominal iFn. Então, é possível:
A) Velocidades −ωn ≤ ω ≤ +ωn e frenagem com recuperação de energia
B) Velocidades ω > ωn e não permite frenagem com recuperação de energia
C) Somente o binário T = Tn para velocidades −ωn ≤ ω ≤ +ωn
D) Binários −Tn ≤ T ≤ Tn para somente a velocidade ω = ωn
7. Considere o sistema de controlo de velocidade de motor de corrente contínua de excitação separada controlado
pela armadura. Sejam, respectivamente, ω e Τ a velocidade e o binário desenvolvido pelo motor e ua e ia a
tensão e corrente na armadura do motor. Então, em regime permanente, pode dizer-se que:
A) Um aumento da tensão fornecida ua origina um aumento do binário T desenvolvido pelo motor
B) Um aumento do binário T solicitado pela carga ao motor origina um aumento da corrente ia
C) Não é possível variar a velocidade ω
D) Outra situação
8. Considere o sistema de controlo de velocidade de motor DC representado na figura. Sejam Una e ωn,
respectivamente a tensão nominal na armadura e a velocidade nominal do motor DC.
rede
3~
+
Conversor
AC → DC
iF
Ua
−
T, ω
Conversor
AC → DC
rede
3~
Então, mantendo constante a tensão Ua = Una aplicada pelo conversor AC → DC à armadura do motor e variando
a corrente de excitação −iFn≤iF ≤+iFn (onde iFn é o valor nominal) resulta:
B) Uma velocidade ω < ωn
A) Uma velocidade ω > ωn
D) Outro resultado
C) A corrente iFn não tem influência em ω
3
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo
9. Considere o sistema de controlo de velocidade de motor DC representado na figura. Sejam Una, IFn e ωn,
respectivamente, a tensão nominal na armadura, a corrente nominal de excitação e a velocidade nominal do motor
DC.
rede
3~
iF
+
Conversor
AC → DC
Ua
T, ω
−
Suponha um conversor AC → DC com −Una ≤ Ua ≤ +Una e permitindo a circulação de corrente eléctrica num só
sentido. Então, é possível obter:
A) Uma frenagem com recuperação de energia
B) Velocidades ω superiores à nominal se iF > IFn
C) Velocidades ω superiores à nominal se 0 ≤ Ua ≤ +Una
D) Outro resultado
10. Considere o sistema de controlo de velocidade de motor DC representado na figura. Sejam Ua, iF, ω e Τ,
respectivamente, a tensão na armadura, a corrente de excitação, a velocidade e o binário do motor DC. Suponha
que os conversores AC → DC são totalmente tiristorizados e que os conversores 1 e 2 estão montados numa
configuração anti-paralelo. Então, a situação que melhor se adapta a um funcionamento típico do sistema vem:
rede
3~
Bobine interfases
Conversor
1
AC → DC
Conversor
2
AC → DC
rede
3~
Rectificador
+
iF
rede
~
Ua
−
T, ω
A) O motor DC pode funcionar nos quatro quadrantes de binário T versus velocidade ω, com valores de
velocidade não superiores ao nominal
B) O motor DC pode funcionar em dois quadrantes de binário T versus velocidade ω, com valores de velocidade
não superiores ao nominal
C) O motor DC pode funcionar em dois quadrantes de binário T versus velocidade ω, com valores seja inferiores
seja superiores aos nominais
D) Outro caso
4
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo
11. Considere o sistema de controlo de velocidade de um motor DC através do conversor DC/DC representado
na figura.
Os parâmetros do sistema são os seguintes:
- Tensão aplicada U=100 V.
- Parâmetros do motor:
Resistência
da armadura
Ra (Ω)
0,5
Indutância
da armadura
La (mH)
10
Constante
do motor
Km (V/rpm)
0,05
- Carga solicita uma corrente na armadura constante de Ia = 10 A.
- ton: intervalo de tempo em que o interruptor está ligado (on).
- toff: intervalo de tempo em que o interruptor está desligado (off).
- T=ton+toff: período do sinal PWM (Pulse Width Modulation).
a) Para um “duty cycle” D1=ton/T do interruptor do conversor, o motor roda à velocidade N1. Então, para um
“duty cycle” D2>D1, o motor rodará a uma velocidade N2, tal que:
A) N2<N1
B) N2=N1
C) N2>N1
D) Outro resultado
b) A velocidade máxima Nmáx que o motor atinge é de:
A) Nmáx=2200 rpm
B) Nmáx=1900 rpm
C) Nmáx=2000 rpm
D) Nmáx=1500 rpm
12. Um motor DC de ímans permanentes possui as seguintes características: Pn = 40 kW; Un = 230 V;
ωn = 1750 rpm. Este motor apresenta uma corrente In = 205 A à carga nominal e uma resistência do circuito da
armadura de Ra = 0.097 Ω. Considere desprezáveis as perdas mecânicas do motor.
a) Determine a velocidade de rotação deste motor quando o binário de carga é TL = 150 Nm e a tensão aplicada
aos terminais do circuito da armadura é Ua = 230 V.
b) Determine a tensão que deve ser aplicada aos terminais do circuito da armadura de forma a que o motor rode a
metade da velocidade nominal com o mesmo binário de carga aplicado (TL = 150 Nm).
5
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo
13. Considere um sistema de controlo do motor assíncrono e as curvas T(ω) de binário versus velocidade para o
motor e a carga representados na figura.
Tmotor
T
Tcarga
ω
ωn
0
Então, o sistema electrónico de alimentação do motor consiste em:
motor
assíncrono
B)
A)
motor
assíncrono
Conversor
AC → AC
+
T, ω
rede
3~
T, ω
Inversor
−
alimentação
DC
C)
motor
assíncrono
Conversor
AC → DC
T, ω
Conversor
AC → DC
rede
3~
D) Outro
14. Considere o sistema de controlo de velocidade de motor assíncrono accionando uma carga, conforme
representado na figura, onde s e Τ representam, respectivamente, o deslizamento e o binário do motor. Além
disso, seja f a frequência da tensão sinusoidal U fornecida pelo inversor. Então, a curva T(s) de binário versus
deslizamento que melhor se adapta ao funcionamento típico deste sistema no modo U/f ≈ constante deverá ser da
forma:
T
A)
T
Tcarga
0
B)
T
Tcarga
s
0
C)
Tcarga
Tcarga
s
0
D)
T
s
0
s
6
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo
15. Considere o sistema de controlo de velocidade de motor assíncrono accionando uma carga, conforme
representado na figura, onde ω e Τ representam, respectivamente, a velocidade e o binário. Considere que os
valores nominais da tensão e frequência de alimentação são, respectivamente, Un e fn. Além disso, seja ωn a
velocidade nominal do motor e f a frequência da tensão sinusoidal U fornecida pelo inversor.
motor
assíncrono
Inversor
+
−
U, f
T, ω
Então, a curva de tensão versus frequência de alimentação U(f) deverá ser da forma:
B)
U
A)
U
Un
Un
ω<ωn
fn
f
0
ω>ωn
Un
Un
f
0
D)
U
C)
U
ω<ωn
fn
0
ω>ωn
f
f
ω<ωn
fn
0
ω>ωn
ω<ωn
fn
ω>ωn
16. Considere o sistema de controlo de velocidade (ω) de motor assíncrono representado na figura.
motor
assíncrono
rede
3~
T, ω
Carga TL(ω)
Então, para um binário de carga TL(ω), variando o ângulo de disparo ψ dos tirístores obtém-se a característica:
(ωS – velocidade de sincronismo para f=50Hz e ψ2>ψ1>0)
A)
B)
T
T
Ψ2
Ψ=0
TL(ω)
Ψ1
Ψ1
Ψ=0
TL(ω)
Ψ2
0
ωS
ω
C) Com o sistema representado na figura não é
possível variar a velocidade de um motor
assíncrono.
0
ωS
ω
D) Outro resultado
7
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo
17. Considere os dois sistemas de controlo do motor assíncrono representados abaixo.
Sistema 1
Sistema 2
motor
assíncrono
motor
assíncrono
+
rede
3~
−
Inversor
T, ω
ω, T
Sejam ω e T, respectivamente as velocidades instantânea e o binário fornecido à carga. Então, pode afirmar-se
que, em condições normais de funcionamento:
A) Os sistemas 1 e 2 proporcionam uma eficiência energética idêntica
B) O sistema 1 permite obter velocidades de rotação ω superiores à nominal
C) Os dois sistemas permitem obter binários T inferiores ao nominal
D) Outro resultado
18. Considere o sistema de controlo de velocidade de motor assíncrono accionando uma carga constituída por um
ventilador, conforme representado na figura. Sejam ω − velocidade instantânea do motor, ωn - velocidade
nominal do motor, Τ − binário instantâneo do motor, Τn - binário nominal do motor.
rede
3~
motor
assíncrono
T, ω
Carga
Então, pode dizer-se que:
A) O sistema permite obter binários Τ > Τn (para qualquer valor de ω)
B) O sistema somente permite obter binários Τ < Τn e velocidades ω < ωn
C) O sistema permite obter somente velocidades ω > ωn
D) O sistema permite obter somente velocidades ω = ωn
19. Considere o sistema de controlo do motor assíncrono representado na figura. Sejam ω e ωn, respectivamente
as velocidades instantânea e nominal do motor e T o binário fornecido à carga.
motor
assíncrono
rede
3~
ω, T
Então, o sistema introduz harmónicos de ordem elevada na tensão aplicada ao motor pelo que:
A) Resulta uma velocidade ω > ωn
B) Resulta somente a velocidade ω = ωn mas aumenta o binário T fornecido à carga
C) Melhora o rendimento energético do motor qualquer que seja a velocidade ω
D) Outro resultado
8
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo
20. Considere o sistema de controlo de velocidade de motor assíncrono representado na figura.
motor
assíncrono
ventilação
forçada
+
Inversor
−
T, ω
a) Dado que o sistema incorpora uma unidade de ventilação forçada pode afirmar-se que:
A) A carga não solicita binários T próximos do nominal para velocidades ω baixas
B) A carga solicita binários T próximos do nominal para velocidades ω baixas
C) Para velocidades ω baixas a carga só solicita binários T muito inferiores ao nominal
D) O motor assíncrono trabalha sempre a velocidades ω elevadas
b) Seja fn = 50 Hz a frequência nominal da tensão de alimentação do motor assíncrono. Para velocidades ω de
funcionamento do motor assíncrono superiores à nominal, o inversor deve providenciar uma tensão de
alimentação com frequência f tal que:
A) f = fn
B) f < fn
C) f > fn
C) Indiferente
21. Considere o sistema de controlo de velocidade de motor síncrono accionando uma carga, conforme
representado na figura, onde ω e Τ representam, respectivamente, a velocidade e o binário (δ - ângulo de carga).
Seja f a frequência da tensão fornecida pelo inversor e seja f1 < f2 < f3.
motor
síncrono
Inversor
+
ventilação
forçada
−
T, ω
Então, as curvas de binário versus velocidade T(ω) serão da forma:
A)
T
C)
T
B)
T
δ=90º
δ=90º
δ=0º
0
ω3
ω2
ω1 ω
δ=90º
ω3
ω2
ω1 ω
δ=90º
δ=0º
δ=0º
0
D)
T
0
ω1
ω2
ω3 ω
δ=0º
0
ω1
ω2
ω3 ω
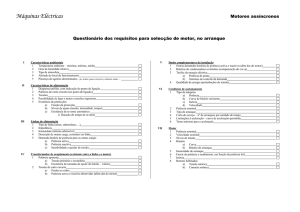
22. Considere um sistema de controlo de posição que adopta como actuador um motor passo a passo. Então,
pode dizer-se que se trata de uma aplicação envolvendo:
A) Potências muito elevadas (e.g. MW)
B) Binários muito elevados (e.g. 100 Nm)
C) Uma eficiência energética muito elevada
D) Outro resultado
9
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo
23. Considere o accionamento de uma carga através de um motor passo a passo. Então, em geral, trata-se de um
accionamento requerendo:
A) Elevados binários
B) Facilidade de ‘interface’ com circuito digital de controlo
C) Elevadas potências
D) Elevada eficiência energética
24. Considere a sequência temporal de excitação de fases de um motor passo a passo (com três fases)
representada na figura.
corrente
na fase A
tempo
corrente
na fase B
tempo
corrente
na fase C
tempo
Então, pode dizer-se que se trata de uma sequência de excitação de fases de:
A) Uma fase
B) Meio passo
C) Duas fases
D) Outro resultado
25. Considere a alimentação de fases de um motor passo a passo com as fases A, B, C. A figura representa a
corrente nas fases versus tempo.
corrente
fase A
t
fase B
t
fase C
t
Então, pode dizer-se que se trata de um modo de alimentação:
A) Unipolar
B) Bipolar
C) Outro resultado
26. Considere a alimentação de um motor passo a passo com duas fases {A, B} representada na figura.
corrente
na fase A
tempo
corrente
na fase B
tempo
Então, pode dizer-se que se trata de:
A) Uma sequência de excitação de fases de “uma fase”
B) Uma sequência de excitação de fases de “meio passo”
C) Uma sequência de excitação de fases de “duas fases”
D) Uma sequência de excitação de fases de “Mini-passo” (ou “Micro-passo”)
10
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo
27. Considere a alimentação bipolar de um motor passo a passo com duas fases {A,B} em que se pretende
adoptar uma sequência de excitação de fases de meio passo. A figura mostra a corrente iA(t) na fase A, onde 8τ
representa o período de repetição.
iA(t)
corrente
na fase A
+I
−I
tempo
0
τ
2τ 3τ 4τ 5τ 6τ 7τ 8τ
Então, a corrente na fase B vem:
A) iB(t)=+I se 2τ<t<3τ, iB(t)=−I se 4τ<t<5τ, iB(t)=0 no restante
B) iB(t)=+I se τ<t<4τ, iB(t)=−I se 5τ<t<8τ, iB(t)=0 no restante
C) iB(t)=+I se τ<t<3τ, iB(t)=−I se 5τ<t<7τ, iB(t)=0 no restante
D) Outro resultado
28. Considere a sequência temporal de excitação de fases de um motor passo a passo (com três fases {A,B,C} e
alimentação bipolar) da figura onde iA, iB, iC e t representam, respectivamente, as correntes nas fases e o tempo.
iA
t
iB
t
iC
t
Então, pode dizer-se que se trata de uma sequência de excitação de fases de:
A) Uma fase
B) Meio passo
C) Duas fases
D) Outro resultado
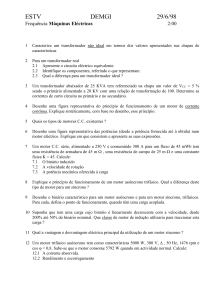
29. Considere a alimentação bipolar de um motor passo a passo com quatro fases {A,B,C,D}. A figura mostra a
corrente ia(t) na fase A, durante um certo período de tempo.
ia(t)
+I
tempo
−I
0
τ
2τ
3τ
4τ
5τ
6τ
7τ
8τ
9τ
10τ
11τ
Sabendo que 8τ representa o período de repetição e que se trata de uma sequência de excitação de fases de meio
passo, então, pode dizer-se que a alimentação da fase C vem:
ic(t)=0 no restante, 0 < t < 8τ
A) ic(t)=+I se τ< t < 4τ, ic(t)=−I se 5τ < t < 8τ,
ic(t)=0 no restante, τ < t < 9τ
B) ic(t)=+I se 2τ < t < 5τ, ic(t)=−I se 6τ < t < 9τ,
C) ic(t)=+I se 3τ < t < 6τ, ic(t)=−I se 7τ < t < 10τ, ic(t)=0 no restante, 2τ < t < 10τ
D) Outro resultado
11
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo
30. Considere a alimentação de um motor passo a passo no modo bipolar. Então, pode concluir-se que:
A) O motor passo a passo é, necessariamente, de relutância variável
B) O motor passo a passo é, necessariamente, de íman permanente ou híbrido
C) Não é possível tirar conclusões sobre o tipo construtivo do motor passo a passo
D) Outro resultado
31. Considere a característica T(ω) de binário versus velocidade de um motor passo a passo representada na
figura.
T
zona A
zona B
zona C
ω
Então, pode dizer-se que tipicamente se tem:
A) zona A- sobrevelocidade, zona B- arranque/paragem, zona C- ressonância
B) zona A- ressonância, zona B- arranque/paragem, zona C- sobrevelocidade
C) zona A- ressonância, zona B- sobrevelocidade, zona C- arranque/paragem
D) zona A- arranque/paragem, zona B- ressonância, zona C- sobrevelocidade
32. Considere a característica T(ω) de binário versus velocidade ω de um motor passo a passo representada na
figura e uma carga mecânica composta por uma inércia J e um atrito B.
T
zona A
ω
Então, pode dizer-se que a zona A
A) É invariável com o valor de B
B) É variável: T(ω) diminui para valores crescentes de B
C) É variável: T(ω) aumenta para valores crescentes de B
D) Outro resultado
33. Considere a característica T(ω) de binário versus velocidade de um motor passo a passo representada na
figura.
T
zona A
ω
Então, pode dizer-se que a zona A deve ser :
A) Adoptada sempre pois o motor passo a passo apresenta maior eficiência
B) Adoptada somente para circuitos de alimentação resistivos
C) Evitada pois corresponde a uma instabilidade de funcionamento
D) Não existe qualquer razão para adoptar ou evitar a zona A
12
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo
34. Considere a característica T(ω) de binário versus velocidade de um motor passo a passo representada na
figura.
T
leg
ω
Então, se J representar a inércia do rotor e da carga, pode dizer-se que a legenda leg deve ser:
A) leg = “J crescente”
B) leg = “J decrescente”
C) leg = “J constante”
D) Outro resultado
35. Considere o circuito de alimentação de um motor passo a passo representado na figura.
Então, trata-se de um circuito do tipo:
A) resistivo
C) “bipolar”
B) “chopper”
D) Outro tipo de circuito
36. Considere o circuito de alimentação de um motor passo a passo representado na figura. A introdução do
condensador C em paralelo com a resistência série Rs pode conduzir a uma melhoria do desempenho em certas
situações conforme representado no gráfico binário vs velocidade.
Explique, sucintamente, o papel do condensador C, as suas vantagens, limitações e/ou eventuais inconvenientes.
13
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo
37. Considere o circuito de alimentação de um motor passo a passo (MPP) representado na figura seguinte.
a) Descreva sucintamente o funcionamento deste circuito.
b) Quais as principais vantagens e limitações deste circuito de alimentação dos enrolamentos de MPP?
38. Considere o circuito de alimentação de um motor passo a passo representado na figura.
Quais são as principais vantagens e limitações deste circuito de alimentação dos enrolamentos de MPP.
14
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo
39. Considere o motor passo a passo, multi-secção, com três fases {A, B, C} e 10 dentes no rotor, representado
esquematicamente na figura.
Determine o passo θ e indique o sentido de rotação quando se alimentam as fases na sequência S = CAB CAB...
40. Considere o sistema com um motor passo-a-passo (MPP) de relutância variável de 4 fases (A, B, C, D) e de 2
pólos representado na figura seguinte.
SA
A
SB
SC
B
D
SD
C
Esboce as sequências temporais de excitação de um passo e de meio passo do MPP no sentido indirecto
(i.e. sentido dos ponteiros do relógio) nos diagramas a seguir apresentados. Comece a sequência pela fase A e
pela posição do rótor indicada na figura.
15
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo (soluções)
Soluções
1. A
(ver página 2.8 dos apontamentos das aulas teóricas)
2. A
3. D
4. B
5. B
6. A
7. B
(ver página 2.6 dos apontamentos das aulas teóricas)
8. D
ω > ωn e ω < ωn
9. D
(ver página 2.12 dos apontamentos das aulas teóricas)
10. A
11. a) C
11. b) B
N max =
U max − R a I a
K
12. a)
U a = Ra I a + K b ω
230 − 0.097 × 205
⇔ K b = 0.12 V/rpm
1750
Kb =
P = Tω
40000
⇔ Tn = 218.27 Nm
Tn =
2π
1750 ×
60
T = Ki Ia
Ki =
Tn
218.27
⇔ Ki =
= 1.064 Nm/A
205
In
230-0.097
ω=
150
Ki
K
⇔ ω = 1803 rpm
12 b)
U a = Ra I a + K b ω
Ua = 0.097 ×
150
+ 0.12 × 875 = 118,7 V
1.064
13. B)
1
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo (soluções)
14. A)
15. D
16. A
17. C
18. B
19. D
20. a) B
20. b) C
21. C)
22. D
23. B
24. B
25. A
26. C
27. B
28. B
29. D
a forma de onda da alimentação da fase C é simétrica da apresentada para a fase A
30. B
31. D
32. B
33. C
34. A
35. D
(aula prática 7)
36. ver livro “Motores passo a passo”, pg. 52 (secção 4.5.1)
37. a)
O circuito apresentado é o circuito de alimentação com multiplicação de tensão. Supondo o condensador C
carregado à tensão de alimentação Vcc, quando se inicia a alimentação de uma fase, o transístor T é colocado em
condução e o díodo D fica polarizado a V=2Vcc. Com o fornecimento de corrente ao enrolamento, o condensador
descarrega-se parcialmente. Dado que V=Vcc+vc, onde vc representa a tensão no condensador, a descarga de C
implica a diminuição da tensão fornecida. Bloqueando o transístor T a alimentação passa pelo díodo D pelo que
a tensão fornecida vem V=Vcc e o condensador recupera a carga através da resistência Rs.
37 b)
Este circuito de alimentação proporciona uma subida rápida da corrente através de um aumento da tensão
aplicada aos enrolamentos resultante de uma pré-carga de um condensador. Esta estratégia é adoptada em
2
SISEL - Sistemas Electromecânicos
Motores eléctricos em sistemas de controlo (soluções)
regimes de arranque e paragem onde permite um desempenho superior ao de um simples circuito resistivo
convencional.
38. Circuito de alimentação série. Ver livro “Motores passo a passo”, pg. 55 (secção 4.5.5)
39.
10 dentes/secção, 3 secções
360º
θ=
= 12º
10 × 3
Sentido horário
40. página 2.36 dos apontamentos das aulas teóricas.
3