CONTROLE CHOPPER PARA ACIONAMENTO DE UM MOTOR PMDC
João Vitor Busquim Braga (PIBIC-EM/CNPq), Marcelo Favoretto Castoldi
(Orientador), e-mail: [email protected], [email protected].
Universidade Tecnológica Federal do Paraná/Departamento de Engenharia
Elétrica/Campus Cornélio Procópio, PR.
Engenharias – Máquinas Elétricas e Dispositivos de Potência.
Palavras-chave: Chopper, Corrente contínua, Motor.
RESUMO: Este trabalho foi realizado com o intuito de verificar a aplicação
de um conversor chopper de corrente contínua em corrente contínua (CCCC) a um motor PMDC (permanent magnetic direct current) utilizando o
programa MATLAB/Simulink para demonstrar como esse mecanismo atua
sobre o motor.
circuito de campo e um de
armadura, dispostos em duas
fontes separadas, em paralelo ou
em série, para fornecer corrente
elétrica a máquina [3].
O motor PMDC, por sua vez,
possui ímãs permanentes no lugar
do
circuito
de
campo,
proporcionando uma estrutura
menor e eliminando as perdas
resistivas do enrolamento de
campo. Dessa forma, o motor
PMDC é muito mais vantajoso
[4][5].
Introdução
O chopper é um controle
utilizado para substituir uma
tensão CC fixa por uma tensão CC
ajustável, sendo aplicado em
reguladores de tensão contínua e
em indutores para gerar uma fonte
de
corrente
contínua
[1],
atendendo as exigências da
eletrônica de potência [2].
Através
do
programa
MATLAB/Simulink
foram
realizadas três simulações para a
análise do funcionamento e da
aplicabilidade do controle.
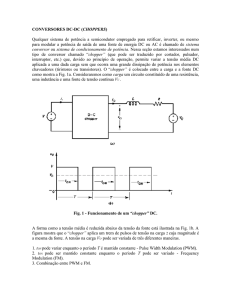
Funcionamento do chopper
Um
chopper
de
um
quadrante (classe A), mostrado na
Figura 1, funciona através de uma
chave acionada por determinado
período.
Materiais e métodos
Motor PMDC
Os motores de corrente
contínua são formados por um
ANAIS III SepesqJr | ISSN – 2237-3659 | www.utfpr.edu.br/cornelioprocopio
Universidade Tecnológica Federal do Paraná | 26 de novembro de 2012 | Cornélio Procópio - PR
1
se consegue uma tensão CC
ajustável e a terceira mostra a
variação da intensidade da rotação
do motor após ser gerado um
torque por uma carga externa.
Figura 1 - Chopper da classe A.
Inicialmente, por estar a
chave aberta, a tensão entre os
terminais da carga é igual a zero.
Fechando a chave por um
determinado período t1, a carga
fica sujeita a uma tensão Vs.
Agora, por um período t2, deixando
a chave aberta, a tensão entre os
terminais da carga se anula [1].
O resultado desse processo
de chaveamento é mostrado na
Figura 2.
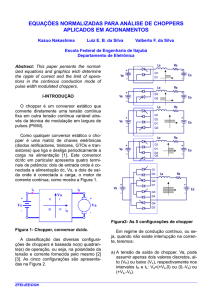
Figura 3 – Chopper da classe E.
As duas chaves ligadas cada
uma a um diodo e aos fios entre a
fonte e o motor têm a função de
evitar a tensão de pico.
Cada chave que compõe o
mecanismo está conectada a um
diodo e a outra chave, formando
dois pares. As chaves são
conectadas em pares (chave 1
com a 4 e chave 2 com a 3) para
que não ocorra curto-circuito.
Consequentemente o sentido da
corrente altera-se de acordo com o
par acionado, sendo positivo para
as chaves 1 e 4 e negativo para as
chaves 2 e 3.
O acionamento de cada par é
feito através do controle mostrado
na Figura 4.
Figura 2 – Formas de onda do
conversor.
Simulações
Utilizando um chopper de
quatro quadrantes (classe E),
esquematizado na Figura 3, mas
que possui o mesmo princípio de
funcionamento que o do anterior,
foram realizadas três simulações:
a primeira mostra como ocorre a
inversão do sentido de rotação do
motor, a segunda demonstra como
ANAIS III SepesqJr | ISSN – 2237-3659 | www.utfpr.edu.br/cornelioprocopio
Universidade Tecnológica Federal do Paraná | 26 de novembro de 2012 | Cornélio Procópio - PR
2
Resultados e Discussão
Primeira simulação
Através das Figuras 5, 6 e 7,
que mostram os gráficos da
velocidade, da corrente e do
torque,
respectivamente,
em
função do tempo; nota-se a
inversão do sentido de rotação do
motor após dois segundos do
acionamento, concluindo-se como
o controle chopper opera.
Figura 4 – Mecanismo de acionamento
do conversor.
O pulso com valor de 100%
da tensão VCC é direcionado para
determinado par de acordo com a
constante
estabelecida
pelo
seletor, sendo que o valor 0 é
atribuído às chaves 1 e 4 e o valor
1, às 2 e 3. O seletor também
determina por quanto tempo qual
constante será utilizada.
Na primeira simulação, a
rotação do motor é inicialmente
negativa e, após dois segundos,
torna-se positiva.
Na segunda simulação, o
sentido do motor não se altera,
permanecendo positivo.
Após dois segundos de
acionamento, o pulso sofre uma
variação de 40%, passando a
emitir uma tensão com 60% de
VCC.
Por fim, na terceira e última
simulação, novamente, o sentido
de rotação permanece positivo, e a
tensão com valor fixo.
Um segundo depois do
acionamento do motor, sobre este
é gerado por uma carga um torque
de intensidade de 4 Nm, causando
uma variação na rotação do motor.
Figura 5 – Gráfico da velocidade
com inversão do sentido.
Figura 6 – Gráfico da corrente com
inversão do sentido.
Figura 7 – Gráfico do torque com
inversão do sentido.
ANAIS III SepesqJr | ISSN – 2237-3659 | www.utfpr.edu.br/cornelioprocopio
Universidade Tecnológica Federal do Paraná | 26 de novembro de 2012 | Cornélio Procópio - PR
3
Segunda simução
Terceira simulação
Com as Figuras 8, 9 e 10 (os
gráficos da velocidade, da corrente
e do torque, respectivamente, em
função do tempo), verifica-se que,
inicialmente, o motor atua com
100% do valor de VCC e, após dois
segundos, com 60%, convertendo
uma tensão CC fixa em ajustável.
Adotando
a
mesma
sequência de gráficos anteriores,
as Figuras 11, 12 e 13 mostram
uma pequena variação sofrida
pelo motor após um segundo do
acionamento deste em função da
entrada de uma carga externa com
torque de intensidade de 4 Nm.
Figura 8 – Gráfico da velocidade
com tensão ajustável.
Figura 11 – Gráfico da velocidade
com entrada de carga.
Figura 9 – Gráfico da corrente com
tensão ajustável.
Figura 12 – Gráfico da corrente
com entrada de carga.
Figura 10 – Gráfico do torque com tensão
ajustável.
Figura 13 – Gráfico do torque com
entrada de carga.
ANAIS III SepesqJr | ISSN – 2237-3659 | www.utfpr.edu.br/cornelioprocopio
Universidade Tecnológica Federal do Paraná | 26 de novembro de 2012 | Cornélio Procópio - PR
4
[4] KRISHNAN, R. Electric motor
drives: modeling, analysis, and
control. Prentice Hall, N.J.,
1980.
[5] MILLER, T. J. E. Brushless
permanent-magnet
and
reluctance
motor
drives.
Oxford University Press,
Clarendon, 1993.
Considerações Finais
Analisando os resultados
obtidos através da simulação de
um controle chopper de quatro
quadrantes conectado a um motor
PMDC, pode-se concluir como o
primeiro opera, invertendo o
sentido de rotação do motor e
convertendo uma tensão CC fixa
em uma ajustável, mostrando
como o conversor pode ser
aplicado de diferentes formas em
máquinas de corrente contínua, a
fim de se conseguir manipular esta
última, como no controle de sua
velocidade.
Agradecimentos
Agradeço ao CNPq
concessão da bolsa.
pela
Referências
[1]
RASHID, Muhammad H.
Eletrônica
de
Potência:
circuitos,
dispositivos
e
aplicações. São Paulo: Makron
Books, 1999. 819p.
[2] VAS, P. Electrical machines
and drives: a space-vector
theory
approach.
Oxford
University Press, Clarendon,
1993.
[3] PEARMAN, Richard A. Power
electronics: solid state motor
control. Reston Pub. Co.,
1980.
ANAIS III SepesqJr | ISSN – 2237-3659 | www.utfpr.edu.br/cornelioprocopio
Universidade Tecnológica Federal do Paraná | 26 de novembro de 2012 | Cornélio Procópio - PR
5