LEVITAÇÃO ELETROMAGNÉTICA DE UM DISCO
Rodrigo Valle, Fábio Neves, Richard Stephan, Rubens de Andrade Jr.
LASUP/UFRJ
Resumo: Este trabalho apresenta um experimento didático que explora a levitação de um
disco de material ferromagnético na presença do campo magnético produzido por um
eletroímã. O trabalho ilustra a importante conexão entre teoria, cálculos analíticos,
simulação, projeto e comprovação experimental, enfatizando a oportunidade que este
estudo pode trazer para a formação na área de ciências físicas e engenharia.
1 - Introdução
Experiências de laboratório constituem parte essencial na formação de estudantes de
engenharia, física e ensino técnico. Os trabalhos experimentais devem permitir a
comprovação de conhecimentos teóricos, despertar o interesse pelo método científico,
valorizar a capacidade de projeto que a teoria oferece e apresentar o estado atual das
ferramentas de medida, análise e síntese disponíveis. Além disso, os experimentos devem
ser simples o suficiente para serem reproduzidos e executados.
As experiências de levitação eletromagnética de esferas já foram objeto de uma
série de artigos técnicos e estudos [1-9]. O excelente efeito visual proporcionado por esta
montagem faz com que demonstrações com esferas levitantes sejam encontradas em vários
museus e já possam ser adquiridas comercialmente, como uma rápida busca na internet
comprova [10-13]. No entanto, os cálculos analíticos deste experimento ficam dificultados
pela distribuição não-linear do campo magnético, o que força soluções suportadas em
simulações ou meramente empíricas.
O presente artigo mostra que a levitação de um disco de material ferromagnético
atende aos requisitos didáticos mencionados anteriormente sendo mais indicado para
finalidades educacionais que a levitação de uma esfera. O capítulo 2 descreve o
experimento e os cálculos analíticos são apresentados no capítulo 3. Os projetos dos
sistemas de controle e de potência fazem parte do capítulo 4. Finalmente, as comprovações
experimentais são apresentadas no capítulo 5 e as conclusões e os trabalhos
complementares no capítulo 6.
2 - Descrição do Experimento
A idéia básica desta montagem encontra-se no estabelecimento de um sistema
simples que permita a comprovação experimental de cálculos analíticos de forças
magnéticas e mecânicas.
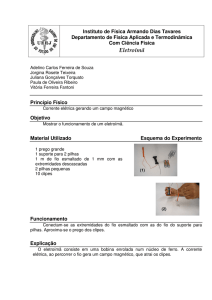
A determinação de forças magnéticas pode ser obtida com certa facilidade no caso
de campos magnéticos constantes. Uma forma simples de se estabelecer um campo
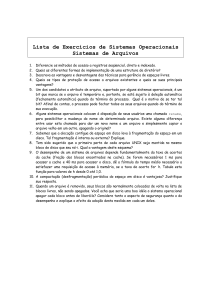
magnético nestas condições está ilustrada na figura 1, que apresenta um disco na
1
proximidade de um eletroímã cilíndrico. O campo magnético, na região de ar entre as faces
do disco e do eletroímã, para pequenos afastamentos, pode ser considerado constante.
Admitindo-se o sistema na posição vertical, com o eletroímã fixo e o disco solto no espaço,
a manutenção de um entreferro constante exige a presença de um sistema de controle que
observe o afastamento “x” e imponha corretamente a corrente “i”, necessária para suportar
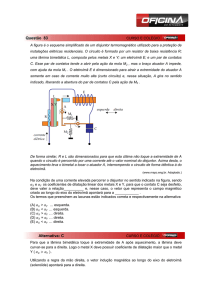
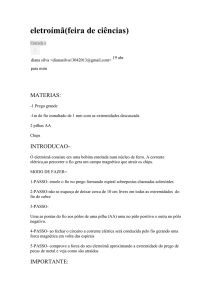
o peso do disco. Além disso, para que a face do disco mantenha-se paralela à face do
eletroímã, deve-se abaixar o centro de gravidade como ilustrado na figura 2. Ou seja,
deseja-se que o ângulo θ entre a face do disco e a linha horizontal, medido a partir do
centro do disco, seja igual a zero.
Figura 1 - Concepção básica do experimento.
Figura 2 - Deslocamento do Centro de Gravidade (CG) do experimento.
2
3 - Cálculos Analíticos
3.1 - Circuito Magnético
Chamando a área total do eletroímã de “A”, o mesmo foi confeccionado de tal
forma que:
A
2
πR12 = π (R − R 2 ) = .
(1)
2
Com isto, para x << R, a relutância no ar fica composta de duas parcelas iguais de
valor:
ℜ=
1 2x
,
µο A
(2)
onde “x” representa o comprimento do entreferro. Considerando-se a permeabilidade
magnética do ferro muito superior à do ar, o fluxo estabelecido no entreferro fica
determinado pelo circuito da figura 3.
Figura 3 - Circuito Magnético.
ϕ=
Ni µο NA i
=
⋅
2ℜ
4
x
(3)
A densidade de fluxo magnético vale:
B=
ϕ
A/ 2
=
µο N i
2
(4)
⋅ .
x
3.2 - Força Eletromagnética
A força eletromagnética pode ser determinada pela derivada da energia armazenada
em relação ao deslocamento. A energia armazenada vale:
2
µ Ni A
1
1 B2
,
E a = BHV =
Ax = ο
2
2 µο
2 2 x
3
(5)
logo:
2
f =
µ AN 2 i
dE a
=− ο
.
8
dx
x
(6)
O sinal negativo que aparece na equação na equação acima indica que se trata de
uma força de atração. Para facilitar as manipulações algébricas, o produto
foi
substituído por uma constante K. Logo, a expressão da força eletromagnética é dada por:
2
i
f = K .
x
(7)
A intensidade da força por unidade de área vale:
2
f µο Ni
1 B2
.
=
=
A 2 2x
2 µο
(8)
Neste ponto, é interessante destacar que se for possível estabelecer uma densidade
de campo magnético de 1T no entreferro, a equação (8) leva a um valor de 40N/cm2, o que
é bastante significativo.
Chamando o peso do disco de P, a corrente io necessária para suportá-lo em
equilíbrio a uma distância xo do eletroímã, segundo a equação (7), é dada por:
i
P = f ( x o , i 0 ) = K ο
xο
resulta:
(9)
Linearizando a força em torno desta posição de equilíbrio determinada por (io, xo),
f = f ( x 0 , i0 ) +
Fazendo:
e
2
.
∂f
∂f
( x0 , i0 )δx + ( x0 , i0 )δi.
∂x
∂i
2
(10)
i
∂f
( x 0 , i0 ) = K x = 2 K 0 3
∂x
x0
(11)
i
∂f
( x0 , i0 ) = K i = 2 K 0 2 ,
∂i
x0
(12)
a força eletromagnética é reescrita como:
f = P + K x δx + K i δi.
(13)
3.3 - Dinâmica do Deslocamento Vertical
A equação dinâmica que rege o deslocamento vertical do disco vale:
m
d 2x
= ∆f = f − P,
dt 2
4
(14)
em que “m” é a massa do disco (1,378 kg). Substituindo a equação (13) na equação (14),
tem-se:
d 2 ∆x
m 2 = K xδx + K iδi.
(15)
dt
Após realizar algumas simples manipulações algébricas nesta equação e aplicar a
Transformada de Laplace, chega-se à função de transferência do sistema:
K
2 Kx
δΧ( s ) = i δΙ( s ),
s −
m
m
δΧ( s)
=
δΙ( s)
Ki
m
.
Kx
2
s −
m
(16)
(17)
Tomando-se como entrada a variação de corrente no eletroímã, o sistema possui
Kx
.
dois pólos reais em ±
m
De acordo com Valle [14], para este experimento, Kx = 429,29 N/m e Ki = 1,97 N/A.
3.4 - Momento Mecânico
Qualquer pequeno desvio angular θ do centro do disco, sugerido na figura 1, fará
com que o equilíbrio seja destruído, tendo em vista que a força magnética é inversamente
proporcional ao deslocamento. Esta situação, na presente proposta, será compensada por
um momento mecânico dado por:
Momento mecânico = PLsenθ .
(18)
A montagem deve ser tal que o momento mecânico seja superior ao momento
produzido pelas forças eletromagnéticas.
3.5 - Momento Eletromagnético
Este cálculo será simplificado desprezando-se a região onde se encontram os
condutores de cobre. O raio da calota adicionada ao disco foi projetado para que
deslocamentos angulares não afetassem a medida do sensor de posição e, como
conseqüência, a corrente circulante no eletroímã. Assim, para um pequeno deslocamento
angular e valendo-se das equações (9) e (11), a variação da força por área é dada por:
∆f
2P
=
∆x = k∆x.
A
xο ⋅ (πR 2 )
5
(19)
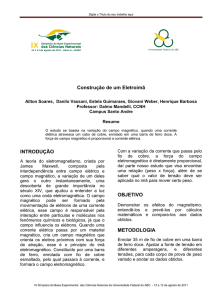
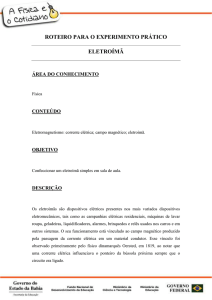
O momento eletromagnético, para um pequeno deslocamento angular θ , resulta da
integral de superfície do elemento de momento eletromagnético (dp) visto na equação
(20). Na figura 4, pode-se ver o elemento de área utilizado na integração.
(
Elemento de Momento = dp = 2 (k∆x ) dr ⋅ 2 R 2 − r 2
Equação (19)
Área
) r.
(20)
Braço de
alavanca
R
2 (R2-r2)1/2
r
dr
Figura 4 - Determinação do momento produzido pelas forças eletromagnéticas.
Para pequenos deslocamentos angulares temos:
∆x = rθ .
(21)
Integrando1 obtemos:
R
Momento Eletromagn ético = ∫r =0 dp = kθπ
R4
.
4
(22)
3.6 - Dinâmica do Deslocamento Angular
Para que o Momento Mecânico seja maior que o Momento Eletromagnético é
necessário que a equação (18) seja maior que a equação (22), portanto
PL θ >
R4
2P
θπ
,
4
xο πR 2
L>
1
2
2
2
∫ r R − r dr =
r 2
2
2r − R
8
(
)
)
(23)
R2
.
2 xο
(24)
(
R2 − r2 +
R4
r
sen −1
8
R
6
Esta condição garante que o disco manterá sua face paralela à face do eletroímã.
Para R = 3,5cm e xο = 1 cm, L > 6,1cm.
4 - Projetos dos Sistemas de Controle e de Potência
4.1 - Controle do sistema
O controle do sistema foi implementado no real time toolbox do Simulink, uma
ferramenta de simulações em tempo real do software Matlab. Os sinais dos sensores são
transmitidos ao computador, processados, gerando, assim, o sinal de comando do circuito
de potência. A figura 5 representa o experimento em estudo, onde x0 é a referência de
posição em relação ao sensor ultra-sônico.
Figura 5 - Representação do experimento.
De acordo com Valle [14], o ganho do sensor de posição ultra-sônico vale
Kpos=248,36 V/m e o ganho do sensor de corrente (sensor de efeito Hall) Kc = 0,51 V/A.
4.2 – Síntese do Controlador
Com base na equação (17), o sistema de controle fica representado pela figura 6.
+
-
C(s)
∆i
Ki
m
K
s2 − x
m
∆x
Figura 6 - Sistema de controle.
O ganho da planta, bem como a posição dos seus pólos, depende da posição de
equilíbrio (x0). No entanto, em qualquer situação, um regulador PD permite estabilizar o
sistema como mostra o diagrama de Lugar das Raízes traçado na figura 7. A escolha do
7
ganho ou posição do zero implicará basicamente na mudança do comportamento dinâmico
do sistema realimentado, mas o ajuste pode ser suficientemente robusto para garantir a
estabilidade em todos os casos. Com o sistema estabilizado pela ação do controlador por
avanço de fase, o erro de regime permanente foi levado à zero adicionando um integrador
ao controlador. Assim sendo:
(s + 56)
1
C ( s ) = 6,94
+ 0,2 .
s
(s + 280)
(25)
Figura 7 - Lugar da Raízes com compensador PD.
Tabela 1 – Parâmetros do Controlador
Parâmetros
Valor
Z
-56 (s-1)
P
-280 (s-1)
Kp
6,94
O diagrama de blocos do sistema está ilustrado na figura 8 e a simulação no tempo
para uma reposta ao degrau de referência neste sistema está ilustrada na figura 9.
8
Figura 8 – Diagrama de blocos da simulação do sistema.
Figura 9 - Resposta ao degrau unitário do sistema de controle
4.3 - Circuito de imposição de corrente
Esta parte do sistema é responsável por gerar a corrente que passa pelo eletroímã, de
forma que o disco se mantenha na posição de equilíbrio. O eletroímã é o atuador da malha
de controle. O circuito de potência é composto por dois mosfets e dois diodos formando
uma ponte.
Eletroímã
VCC
Figura 10 - Esquema do circuito de imposição de corrente.
Quando o sinal de controle é positivo, os dois mosfets são acionados e é aplicada
uma tensão positiva no eletroímã (+VCC), ou seja, a corrente que passa no eletroímã
aumenta e atrai a esfera. Quando o sinal de controle é negativo, os mosfets são bloqueados
9
e é aplicada uma tensão negativa no eletroímã (-VCC), ou seja, a corrente que passa nele
decresce e a esfera tende a cair.
Portanto, os mosfets irão chavear e a corrente média ficará igual à corrente de
referência i0 quando a esfera estiver na posição de equilíbrio x0.
5 - Resultados
5.1 – Resposta ao degrau
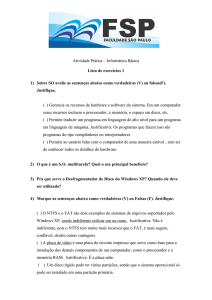
Partindo da posição de equilíbrio, foram impostas duas variações em degrau na
referência. A
figura 11 mostra o disco levitando na posição de referência e a figura 12 mostra a
resposta experimental do sistema aos degraus positivo e negativo.
Figura 11 - Disco levitando.
Figura 12 - Posição medida e referência de
posição para variações em degrau.
A freqüência de chaveamento dos mosfets foi de aproximadamente 300 Hz.
5.2 – Resposta em freqüência
Para se obter a resposta em freqüência do sistema, foram impostas variações
senoidais na referência e obtidas as seguintes respostas:
(a)
(b)
10
(c)
(d)
(e)
(f)
Figura 13 – Posições medidas e referências para as freqüências, em Hz, de: a) 0,1; b) 0,5; c) 1,0;
10,0; e) 15,0 e f) 20,0.
d)
6 - Conclusão
O presente artigo demonstrou a viabilidade de combinar o ensino de controle,
eletromagnetismo, mecânica, eletrônica de potência, instrumentação e processamento de
sinais através de uma interessante experiência de laboratório.
Os resultados obtidos com variações em degrau mostraram que o controlador
conseguiu estabilizar o sistema com erro de regime zero. Porém houve uma assimetria em
relação aos degraus positivo e negativo, evidenciando a não linearidade do sistema.
Para as variações senoidais na referência, nas freqüências de 0,1 Hz, 0,5 Hz e
1
Hz a amplitude da saída foi maior que a amplitude da entrada, evidenciando que estas
freqüências estão abaixo da freqüência natural de ressonância do sistema. Para a freqüência
de 10 Hz a amplitude da saída começou a diminuir e a defasagem angular entre a saída e a
entrada passou a ser aproximadamente 180°. Com 15 Hz a amplitude da saída já se
apresenta aproximadamente igual à amplitude da entrada e para 20 Hz a amplitude da saída
é menor que a amplitude da entrada, com defasagem angular de 180°, indicando que esta
freqüência é maior que a freqüência natural do sistema.
Como sugestão de trabalho futuro, a medição da posição poderá ser substituída pela
medição da densidade de fluxo no entreferro (B) e da corrente no eletroímã (i), como ensina
a equação (4). Com isto, consegue-se eliminar a necessidade de um caro sensor de posição
por sensores de efeito Hall de baixo custo.
11
7 – Agradecimentos
À FAPERJ e ao CNPq pelo apoio financeiro. À Guilherme Sotelo, Ocione Machado
e Genésio Sant-Anna pelo apoio no desenvolvimento do trabalho.
8 - Referências
1. GOMES, R.R., SOTELO, G.G., STEPHAN, R. M. COMPARAÇÃO DE CONFIGURAÇÕES PARA UM
LEVITADOR ELETROMAGNÉTICO PELO MÉTODO DOS ELEMENTOS FINITOS In: CONGRESSO
BRASILEIRO DE ELETROMAGNETISMO, 2004, SÃO PAULO;
2. GOMES, R.R., SOTELO, G.G., STEPHAN, R. M. DESENVOLVIMENTO DE UM SISTEMA
DIDÁTICO PARA LEVITAÇÃO ELETROMAGNÉTICA COM O AUXÍLIO DO MÉTODO DOS
ELEMENTOS FINITOS In: CONGRESSO BRASILEIRO DE AUTOMÁTICA, 2004, GRAMADO;
3. HURLEY, W. G., ELECTROMAGNETC DESIGN OF A MAGNETIC SUSPENSION SYSTEM, IEEE
TRANSACTIONS ON EDUCATION, VOL.40, NO 2, MAY 1997;
4. VILMA A. O., TOGNETTI, E.S, SIQUEIRA, D. ROBUST CONTROLLERS ENHANCED WITH
DESIGN AND IMPLEMENTATION PROCESSES, IEEE TRANSACTIONS ON EDUCATION, VOL. 49,
NO. 3, AUGUST 2006;
5. BARANOWSKI, J.; PIATEK, P. NONLINEAR DYNAMICAL FEEDBACK FOR MOTION CONTROL
OF MAGNETIC LEVITATION SYSTEM. POWER ELECTRONICS AND MOTION CONTROL
CONFERENCE 2008, EPE-PEMC 13TH, PP. 1446 - 1453, POLAND.
6. JAYAWANT, B. V. ; SINHA, P. K.; WHEELER, A. R.; WHORLOW, R. J.; WILLSHER, J.
DEVELOPMENT OF 1-TON MAGNETICALLY SUSPENDED VEHICLE USING CONTROLLED D.C.
ELECTROMAGNETS. IN. PROC IEEE , VOL.123, PP. 941 - 948, 1976, UNITED KINGDOM.
7. NAUMOVIĆ, M. B. MODELING OF A DIDACTIC MAGNETIC LEVITATION SYSTEM FOR
CONTROL EDUCATION. TELECOMMUNICATIONS IN MODERN SATELLITE, CABLE AND
BROADCASTING SERVICE. 6TH INTERNATIONAL CONFERENCE ON TELSIKS, VOL.2, PP. 783 786, OCTOBER 1-3 2003, SERBIA AND MONTENEGRO.
8. SINHA, P. K. ELECTROMAGNETIC SUSPENSION: DYNAMICS AND CONTROL. IEE CONTROL
ENGINEERING SERIES, ENGLAND 1987.
9. WILLIAM, G. H.; HYNES, M.; WÖLFLE, W. H. PWM CONTROL OF A MAGNETIC SUSPENSION
SYSTEM. IEEE TRANSACTIONS ON EDUCATION, VOL. 47, NO. 2, PP. 165 - 173, MAY 2004,
IRELAND.
10. WWW.XUMP.COM;
11. HTTP://WWW.FASCINATIONS.COM;
12. HTTP://SCIENTIFICSONLINE.COM;
13. HTTP://SHOP.NATIONALGEOGRAPHIC.COM;
14. VALLE, R. L. S. LEVITAÇÃO ELETROMAGNÉTICA DE UM DISCO. PROJETO FINAL DEE/UFRJ,
2010, RIO DE JANEIRO.
12