Capítulo V
O CORPO RÍGIDO
1. Introdução
Até agora, nos capítulos anteriores, temos estudado sistemas de forças aplicados a
corpos cujas dimensões, para efeitos práticos, se podem reduzir a um ponto. Trata-se
da dinâmica do ponto material que é regida pela 2ª lei de Newton
=
=
Vimos que nestas circunstâncias o único efeito de uma força é o de provocar uma
aceleração no corpo afectado.
≠
≠
=
=
No caso de um corpo com dimensões que não podem ser desprezadas, esta
descrição simples não chega, pois a acção de uma força pode ter duas
consequências:
um movimento de translação variado, como para o ponto material
um movimento de rotação variado
Para sabermos o que se passa na ausência de qualquer força, imaginemos um
astronauta em situação de imponderabilidade na Estação Espacial. Se ele atirar um
lápis através da cabina, nenhuma força estará a actuar, no entanto o movimento do
lápis será complexo, embora regular (figura 1). Ele terá um movimento de rotação
uniforme em torno de um ponto característico, mas como um todo ele também terá
um movimento de translação. Este ponto característico do corpo designa-se por
centro de massa e a sua definição formal será apresentada mais adiante.
Para já ficamos com o enunciado da 1ª lei de Newton para um corpo rígido,
justificado pela experiência imaginária que acabámos de fazer. Na ausência de forças
aplicadas a um corpo rígido, o seu centro de massa terá um movimento rectilíneo e
uniforme e o corpo rodará com uma rotação uniforme em torno do centro de massa.
Se existirem forças mas a sua resultante for nula, então apenas poderemos para já
garantir o movimento de translação do centro de massa, mas não a rotação uniforme.
O efeito de rotação de um sistema de forças pode ser diferente de zero mesmo que a
resultante seja nula.
Cap.5-1
Quando várias forças actuam um corpo
rígido, como se mostra na figura 2, o corpo
terá um movimento complexo feito pela
sobreposição de um movimento de
translação do centro de massa, com um
movimento de rotação realizado em torno
do mesmo centro de massa.
2. O Centro de Massa
Vamos começar por definir o centro de massa para um sistema formado por partículas
discretas pontuais, cada uma com uma massa e um vector posição que define a
sua posição, de coordenadas
. Se for a massa total do sistema,
=
o vector posição do centro de massa de um sistema de partículas ,
pela expressão
, vem dado
=
Cada uma das coordenadas do vector posição vem então dada por
=
=
=
Para um corpo rígido formado por uma distribuição contínua de massa, deve-se
substituir na expressão anterior o somatório pelo integral e a massa de uma partícula
pelo elemento de massa
, obtendo-se a definição do centro de massa de um
corpo rígido como
=
→
=
=
onde
representa de novo a massa total do
sistema
=
O triplo integral indica que este deve ser feito
em todo o volume do corpo, como se indica
na figura 3. Se for conhecida a distribuição de
densidades no interior do corpo, então o
elemento de massa
deve ser substituído por
uma expressão em função do elemento de
volume
=ρ
Cap.5-2
=
No caso de corpos homogéneos,
de densidade constante, que
tenham um centro de simetria,
então o centro de massa coincide
com o centro geométrico do corpo.
No caso de um triângulo o centro
geométrico é também designado
por baricentro.
Existem situações em que o centro de massa de objectos complexos pode ser
calculado de forma simples. É o caso de objectos que sejam formados pela
associação de figuras geométricas simples, ou que contenham recortes de figuras
geométricas. Em qualquer dos casos, cada um dos elementos que compõe o objecto
total pode ser considerado como uma partícula com a sua massa toda concentrada no
seu centro de massa. Em seguida podemos aplicar a expressão para o cálculo do
centro de massa de um sistema de partículas. No caso de um recorte, a ausência de
massa deve ser considerada como uma massa negativa. Vamos ilustrar este princípio
com dois exemplos.
Exemplo 1 Cálculo do centro de massa de um objecto composto
Seja então o objecto representado na figura 5. Trata-se de um corpo recortado de
uma chapa e por isso podemos considerar que não tem espessura, apenas área. O
corpo não tem eixos nem centro de simetria, no entanto ele pode ser considerado
como a associação de dois paralelogramos, como se indica na figura (esta não é a
única decomposição possível). O centro de massa do objecto será então o resultado
da associação de duas partículas, cada uma com a massa toda concentrada no
centro geométrico de cada um dos rectângulos. Para calcular a massa de cada um
dos rectângulos usamos a propriedade do corpo ser homogéneo e sem espessura
para definirmos uma densidade superficial como a massa por unidade de área
σ=
Podemos assim calcular a massa de cada um dos rectângulos e a massa total do
corpo como
=
=σ
= σ
Quanto aos centros de massa de cada um dos rectângulos, as suas coordenadas
obtêm-se directamente da figura 5
=
=
Podemos agora aplicar as expressões que nos dão as coordenadas do centro de
massa para um sistema com duas partículas,
Cap.5-3
=
=
+
σ
=
+
=
+ σ
=
σ
σ
+ σ
=
σ
+
+
=
=
As coordenadas do centro de massa do objecto composto são então dadas por
=
Exemplo 2 Cálculo do centro de
massa de um objecto com recortes
Seja então o exemplo da figura 6 onde
se recortou um disco circular de um
rectângulo. O corpo composto deve
ser considerado como a diferença
entre um rectângulo simples e um círculo, ambos com os centros de massa
coincidentes com o centro geométrico. A diferença em relação ao exemplo anterior é
que neste caso a massa do recorte deve ser considerada como negativa, obtendo-se
as expressões seguintes para o cálculo do centro de massa do objecto
−
−
=
=
−
−
2. Propriedades do Centro de Massa
Vamos partir da definição de centro de massa para um sistema de partículas, rearranjando um pouco os termos
=
Se derivarmos agora ambos os termos em ordem ao tempo, obtemos
=
Isto é, a quantidade de movimento total do sistema de partículas é igual à quantidade
de movimento do seu centro de massa, como toda a massa lá concentrada
=
=
Derivando novamente em ordem ao tempo e usando a 2ª lei de Newton, podemos
escrever
=
=
=
=
Esta última equação significa que quando um sistema de partículas (ou corpo rígido)
se move sob a acção de várias forças, então o centro de massa do sistema/corpo tem
um movimento de translação como se todas as forças e a massa aí estivessem
concentradas. Com massa constante, um corpo rígido deve obedecer à lei de Newton
para a translação do centro de massa
=
Cap.5-4
Por exemplo um atleta ou ginasta que efectua saltos pode ter um movimento bastante
complexo, com piruetas e cambalhotas. No entanto, o centro de massa do atleta deve
ter um movimento simples, idêntico ao de uma partícula sujeita à acção do peso, isto
é, o centro de massa deverá ter uma trajectória parabólica. No caso do salto à vara ou
do salto em altura, o atleta deve passar por cima de uma fasquia. Mas isto não
significa que o centro de massa tenha de passar também por cima da fasquia. De
facto, no seu movimento os atletas deformam o corpo de forma a baixar o mais
possível o seu centro de massa.
O ponto de aplicação do peso nos sistemas de partículas ou em corpos rígidos, é
designado por centro de gravidade. Para corpos de pequenas dimensões, no interior
dos quais a aceleração da gravidade não varia, o centro de gravidade coincide com o
centro de massa. Para corpos de grandes dimensões, uma montanha por exemplo,
onde o peso varia de local para local, o centro de gravidade e o centro de massa já
não serão coincidentes.
Quando a resultante das forças for nula, então o centro de massa ou está em repouso
ou tem um movimento rectilíneo uniforme. Esta situação designa-se por equilíbrio de
translação do corpo rígido. No entanto o corpo pode estar em rotação com
movimento variado. A resultante nula das forças não garante o equilíbrio do corpo
rígido, apenas o equilíbrio de translação.
3. O Momento de uma Força
3.1 Definição
O exemplo mais simples do poder de rotação de uma força é a abertura de uma porta.
Habitualmente a porta é empurrada pela extremidade mais afastada das dobradiças.
Se tentarmos ver o que sucede quando a mesma força é aplicada num ponto cada
vez mais próximo das dobradiças, verificamos que a abertura da porta se torna cada
vez mais difícil até se atingir um ponto em que é mesmo impossível mover a porta. De
facto se aplicarmos uma força directamente sobra a dobradiça, nunca será possível
fazer rodar a porta, por maior que seja a força.
Este exemplo simples mostra-nos duas coisas. Em primeiro lugar que o poder de
rotação de uma força depende não só da força (módulo, direcção e sentido), como
também do seu ponto de aplicação. Em segundo lugar, só podemos falar de rotação
em relação a qualquer coisa, que pode ser um eixo, como as dobradiças da porta, ou
um ponto fixo no corpo.
Imaginemos agora que seguramos a porta por um fio cujo comprimento podemos
variar à nossa vontade. Se o fio estiver preso na porta sempre no mesmo ponto e esta
estiver esticada perpendicularmente à porta, verificamos que o poder de rotação da
força não depende da posição na corda em que aplicamos a força. O fio representa a
recta que serve de suporte à força aplicada. Esta recta é designada por linha de
acção da força. Verificamos assim uma 3ª propriedade do poder de rotação das
forças, este não se altera se a força se desloca ao longo da sua linha de acção.
Cap.5-5
A grandeza física que mede o poder de rotação de uma força é o momento da força
que se representa pela letra
. O momento de uma força
aplicada num ponto P
de posição em relação ao ponto O (ver figura 7) é definido pela expressão
= ×
Na figura 7a vemos a situação a 3 dimensões enquanto que na figura 7b se vê a
projecção da força e do vector posição no plano XY (a sombreado na figura 7a). Pelas
propriedades do produto externo, podemos dizer que o módulo do momento da força
vale
=
α=
=
α
A distância b que aparece na definição do módulo da força chama-se de braço da
força. Ela representa a distância entre a linha de acção da força e o ponto (ou eixo)
em torno do qual se efectua a rotação. Essa distância é medida na perpendicular,
como se mostra na figura 7. O módulo do momento de uma força é assim igual ao
produto da força pelo seu braço.
Vemos assim justificadas as propriedades do poder de rotação que intuitivamente
tínhamos visto com o exemplo de uma porta. O poder de rotação da força aumenta
com a distância da linha de acção da força ao eixo de rotação (braço da força). Por
outro lado, o braço da força não depende da posição da força ao longo da sua linha
de acção e por isso o momento de uma força não depende da posição da força na
sua linha de acção, como tínhamos inferido.
Quando a linha de acção da força passa pelo eixo de rotação o momento da força é
nulo. Podemos empurrar a dobradiça da porta com uma força que por maior que ela
seja, nunca conseguiremos fazer rodar a porta.
O momento da força é um vector cuja
direcção é perpendicular ao plano
e
. Na
definido pelos vectores
figura 7 essa direcção é representada
pelo eixo ZZ, uma vez que o vector
posição e a força se encontram no
plano XY. O sentido do vector momento
é dado pela regra do saca-rolhas ou
pela regra da mão direita, como temos
Cap.5-6
visto para o produto interno (figura 8).
3.2 Forças no plano
Quando todas as forças e vectores posição se encontram num mesmo plano, o que
ocorre nas aplicações que iremos estudar, não é necessário aplicar a definição do
momento da força através de um produto externo para calcular o poder de rotação da
força. Nesta situação podemos realizar um cálculo expedito que passamos a
descrever.
1) Se as forças e vectores posição
estão num plano então os momentos
estarão
todos
numa
direcção
perpendicular ao plano e essa direcção
será representada por um ponto. Os
momentos poderão ter então um
sentido para fora do plano do papel ou
para dentro do plano do papel. Para
definirmos qual destes sentidos é o
positivo, podemos indicá-lo por um arco
de circunferência orientado, como se
mostra na figura 9. Se uma força fizer
rodar o corpo no sentido indicado o seu
momento será positivo, caso contrário
ele será negativo.
2) Uma vez definido um sentido positivo, o valor do momento será dado pelo produto
da força pelo braço, com o sinal positivo ou negativo dado pelo sentido de rotação do
movimento
=±
Por exemplo, referindo-nos à situação descrita na figura 9, o momento da força
será positivo, enquanto que o momento da força
=
é negativo
=−
4. O Equilíbrio do Corpo Rígido
4.1 Equilíbrio de rotação
Um corpo rígido estará em equilíbrio de rotação em relação a um ponto O quando a
soma dos momentos em relação a esse ponto for nula, isto é,
=
Se o ponto O não estiver definido à partida, isto é, se o corpo poder rodar em torno de
qualquer ponto, então o corpo rígido só estará em equilíbrio se for possível garantir a
igualdade anterior, para todo e qualquer ponto do espaço. Esta é naturalmente uma
condição muito difícil de se verificar na prática. A situação mais interessante é aquela
Cap.5-7
que se refere ao equilíbrio global do corpo rígido, quer em translação, quer em
rotação. Esta é uma situação mais simples de tratar graças ao teorema que iremos
mostrar já de seguida.
4.2 Teorema dos eixos paralelos para o momento da força
Consideremos, como na figura 10, uma
força aplicada no ponto P. O momento
dessa força em relação ao ponto O é
.
Seja agora o ponto O’ em relação ao qual o
vector posição da força vale = + onde
é o vector que une os dois pontos
=
. Qual é a relação que existe entre
o momento calculado em relação a O’ e o
momento calculado em relação a O? Pelo
desenho da figura 10, é fácil escrever
= × = + × = ×
+ ×
=
+ ×
Se em vez de uma força tivermos um sistema de várias forças, sendo o momento da
força uma grandeza aditiva, podemos então escrever, usando a relação anterior, para
o momento total do sistema de forças em relação ao ponto O’,
, a expressão
=
=
+
×
=
+ ×
Isto é, o momento do sistema em relação a O’ é igual ao momento em relação a O
mais o produto externo do vector pela resultante de todas as forças
=
+ ×
= , então o
Como consequência, se a resultante de todas as forças for nula,
momento do sistema de forças é idêntico, seja qual for o ponto em relação ao qual ele
é calculado,
=
=
∀
Quando a resultante é nula, o ponto em relação ao qual se calcula o momento do
sistema de forças é arbitrário.
4.3 O binário de forças
O sistema mais simples de forças
que é capaz de fazer rodar um
corpo rígido, mas que não tem
nenhum efeito de translação, é o
binário de forças. Como a figura
11 mostra, um binário de forças é
formado por um par de forças
simétricas,
e −
, cujas linhas
de acção não são coincidentes,
encontrando-se à distância
entre si. Sendo um par de forças simétricas, a sua
Cap.5-8
resultante é nula e por isso, pela 2ª lei de Newton, o seu efeito de translação é nulo.
No entanto, elas têm poder de rotação. Usando o teorema dos eixos paralelos, esse
poder de rotação, o momento do binário, pode ser avaliado em relação a qualquer
ponto do espaço. Escolhemos por isso, por exemplo, o ponto P’ da figura 11. O
momento da força − é nulo uma vez que a sua linha de acção passa pelo ponto.
Por isso o momento do binário em relação ao ponto P’ será exclusivamente devido à
força . Esse momento é um vector perpendicular ao plano do papel e o sentido da
rotação que produz é o indicado pela seta da figura 11. O módulo do momento do
binário será então
=
Isto é, o momento de um binário, em módulo, é igual ao produto do módulo da força
pela distância entre as linhas de acção das forças, o braço do binário. Pelo terorema
dos eixos paralelos, visto anteriormente, este momento é sempre o mesmo, seja qual
for o ponto considerado para a rotação.
4.4 Condições gerais para o equilíbrio do corpo rígido
Uma vez que um corpo rígido pode ter dois movimentos, de rotação e de translação,
ele só poderá estar em equilíbrio se estiver simultaneamente em equilíbrio de rotação
e em equilíbrio de translação.
Como vimos no início deste capítulo, um corpo rígido está em equilíbrio de translação
desde que a resultante de todas as forças for nula. Nestas condições o centro de
massa do corpo rígido ou está em repouso ou tem movimento rectilíneo uniforme.
Para o corpo rígido estar em equilíbrio de rotação, acabámos de ver, que se torna
necessário que a soma dos momentos de todas as forças, em relação a qualquer
ponto do espaço, seja nula. Mas, se o corpo rígido já estiver em equilíbrio de
translação (resultante nula) então para garantir o equilíbrio de rotação basta verificar a
condição de equilíbrio para um ponto arbitrário do espaço.
Estas duas condições, que asseguram o equilíbrio do corpo rígido, podem ser
sintetizadas pelas equações vectoriais seguintes
=
=
4.5 Exemplos de aplicação do equilíbrio do corpo rígido
A alavanca interfixa
A alavanca é uma das máquinas simples mais antigas usadas pela humanidade. O
objectivo de uma alavanca é o de diminuir(ou aumentar) a força aplicada (força
potente) que é necessária para vencer uma outra força (força resistente), por
intermédio de uma barra que pode oscilar em torno de um ponto (o fulcro). As
alavancas classificam-se de acordo com o posicionamento relativo destes três
elementos, a força potente, a força resistente e o fulcro. Uma alavanca interfixa é uma
Cap.5-9
alavanca em que o fulcro se encontra no
interior da barra, estando as forças
potente
e
resistente
nas
suas
extremidades. Um exemplo esquemático
encontra-se ilustrado na figura 12. Hoje
em dia são numerosas as utilizações de
alavancas interfixas, um martelo para
arrancar pregos, um pé-de-cabra, um
alicate, o pedal da embraiagem de um
automóvel, etc.
No caso da figura 12 pretendemos com o
auxílio da alavanca, suspender e
equilibrar o peso
da massa M, usando
aplicada na outra
uma força menor
extremidade da barra. Vamos desprezar
aqui o peso da barra. Por isso, as forças
que estão aplicadas sobre a barra são,
para além do peso
e da força , a reacção na barra aplicada no fulcro, . Esta
reacção aplicada em pontos em torno dos quais um corpo rígido pode rodar, como a
barra da alavanca, podem ter uma orientação qualquer. Neste caso, estamos em
presença de um sistema de forças paralelas e por isso podemos assegurar que a
reacção será vertical e de baixo para cima.
Para a barra estar em equilíbrio, temos primeiro que assegurar que ela está em
equilíbrio de translação. Para isso a resultante de todas as forças deve ser nula.
Usando o eixo YY indicado na figura podemos escrever para o equilíbrio de translação
+ + =
→
− − + =
→
= +
Esta equação permite-nos calcular o módulo da reacção, se soubermos o peso e a
força aplicada.
Para garantir o equilíbrio de rotação devemos calcular o momento de todas as forças
em relação a um ponto arbitrário, por nós escolhido. Podemos escolher, por exemplo,
o ponto F, o fulcro. A escolha deste ponto é muito importante pois devemos
lembrarmo-nos que o momento de qualquer força cuja linha de acção passe pelo
ponto é nulo e assim essa força desaparece dos nossos cálculos. A escolha do ponto
F permite-nos assim eliminar a reacção no cálculo dos momentos.
Escolhido o ponto, procedemos ao cálculo simplificado dos momentos, usando a
metodologia apresentada anteriormente. O sentido positivo da rotação é o indicado na
figura. Por isso, o momento do peso é negativo enquanto que o modelo da força
aplicada é positivo. Temos assim, usando para os braços das forças as distâncias
indicadas na figura 12
=
=−
=
Pelo equilíbrio de rotação do corpo rígido podemos então escrever
=
→
−
+
=
Resolvendo em ordem à força F, obtemos
Cap.5-10
=
Concluímos assim que, numa alavanca interfixa (em que desprezámos o peso da
barra) a economia da força aplicada é proporcional à razão entre as distâncias de
aplicação das linhas de acção das forças potente e resistente. Quanto mais afastada
estiver a força potente em relação ao fulcro, mais eficaz será a alavanca.
Onde está a reacção normal?
Este problema foi inspirado num artigo que apareceu na Gazeta de Física (publicação
da Sociedade Portuguesa de Física) no ano de 2002. A questão colocada tem a ver
com a localização do ponto de aplicação da reacção normal, quando se estuda o
equilíbrio de um corpo rígido assente num plano inclinado.
Na dinâmica do ponto material, todas as forças se podiam considerar aplicadas no
mesmo ponto e por isso esta questão nunca se colocou. No caso de um corpo rígido
ela é importante. Se inclinarmos demasiado um plano inclinado, o corpo pode tombar.
Em que condições ocorre essa situação? Como iremos ver, esta questão está
directamente relacionada com a localização do ponto de aplicação da reacção normal.
× . Ele está assente
Consideremos o bloco indicado na figura 13, de dimensões
num plano com inclinação α . O bloco está em equilíbrio sob a acção de 3 forças, o
peso , o atrito estático
e a reacção normal
. O peso está aplicado no centro
geométrico do bloco (por ser um corpo homogéneo) e o atrito está aplicado num ponto
a meio da base. A questão que se coloca é saber em que ponto está aplicada a
reacção normal. Esta posição é identificada pela distância , distância entre a linha de
acção da reacção e o eixo normal.
O estudo deste problema é feito a partir do equilíbrio do corpo rígido, de translação e
de rotação. O equilíbrio de translação exige que a resultante de todas as forças,
aplicadas no mesmo ponto, seja nula
Cap.5-11
+ + =
Usando o sistema de eixos indicado na figura, esta equação vectorial traduz-se num
sistema de duas equações escalares, cuja resolução permite obter a expressão da
reacção normal e do atrito em função do peso
α− =
=
α
α=
−
α
=
O equilíbrio de translação não permite determinar a posição da linha de acção da
reacção normal. Para esse efeito temos de usar o equilíbrio de rotação. Como a
resultante das forças é nula, o equilíbrio pode ser avaliado em relação a um ponto
arbitrário. Podemos escolher, por exemplo, o ponto O, o centro geométrico do bloco.
Como sentido positivo da rotação escolhemos o sentido indicado na figura com uma
seta. Em relação a este ponto o momento do peso é nulo (a linha de acção passa
pelo ponto), o momento do atrito é positivo enquanto que o momento da reacção
normal é negativo,
=
=
=−
Pelo equilíbrio de rotação do corpo rígido podemos então escrever
=
→
−
=
Resolvendo, obtemos
=
α
=
α
=
α
Por construção geométrica, ilustrada na figura 13, podemos ver que este valor é
exactamente o cateto oposto do triângulo rectângulo definido pelo peso, eixo normal e
plano inclinado. Isto é, a reacção normal está aplicada exactamente no ponto em que
a linha de acção do peso intersecta o plano inclinado. Podemos agora apreciar melhor
em que condições é que o corpo “perde o equilíbrio” e tomba. O corpo irá tombar
quando o ponto de aplicação da reacção normal sair da base do corpo, isto é, quando
a projecção do peso no plano inclinado cair fora da base. Esta conclusão é geral,
aplicando-se mesmo a corpos não homogéneos.
5. A dinâmica de rotação do corpo
rígido
Até este momento estudámos a cinemática
e a dinâmica da translação e da rotação
em paralelo. Por exemplo, a figura 14
mostra a relação que existe entre os
vectores velocidade (linear) e velocidade
angular ω , quando um corpo de massa
descreve um movimento circular de raio ,
com vector posição .
Estamos por isso em condições de
apresentar numa tabela comparativa as
grandezas já conhecidas para a translação e rotação,
Cap.5-12
Translação
Rotação
θ
ω
γ
= ×
???
???
???
Tipo
Cinemática
Cinemática
Cinemática
Dinâmica
Dinâmica
Dinâmica
Dinâmica
Como podemos apreciar, faltam ainda encontrar na dinâmica de rotação as grandezas
correspondentes ao momento linear (ou quantidade de movimento), à massa e à
energia cinética de translação.
Vamos começar pelo análogo da quantidade de movimento. Em dinâmica de rotação,
essa grandeza chama-se momento angular e representa-se habitualmente por um
“L” maiúsculo, . A sua definição é muito semelhante à do momento de uma força.
e à distância
Uma partícula de massa , animada de uma velocidade
ponto O, tem um momento angular
em torno desse ponto definido por
= ×
de um
= ×
Atendendo à figura 14, é possível perceber que o momento angular é um vector que
tem a mesma direcção e sentido do vector velocidade angular ω . No sistema
internacional de unidades, SI, o momento angular não tem uma unidade particular. Ela
é apenas ! " #"$% .
Para saber o valor do módulo do momento angular devemos atender à relação
vectorial entre e ω (figura 14)
ω
= ×
=
× ω×
→
= =
Uma vez que
tem a direcção e sentido de ω , podemos então escrever que uma
partícula em rotação em torno de um eixo, tem um momento angular dado por
=
ω
Por analogia com a expressão da quantidade de movimento para a translação,
=
, podemos dizer que o factor que multiplica a velocidade angular na expressão
do momento angular é o análogo da inércia na translação. De facto, o produto da
massa pelo quadrado da distância ao eixo de rotação é a grandeza que mede a
inércia de rotação da partícula. Esta grandeza designa-se por momento de inércia, &
&=
Em termos desta nova grandeza teremos então que o momento angular de um corpo
em rotação em torno de um eixo se pode exprimir por
= &ω
Cap.5-13
Como vemos, existe uma analogia perfeita de = &ω com =
, onde a massa se
substitui pelo momento de inércia e a velocidade pela velocidade angular.
Podemos agora apresentar finalmente a equação para a dinâmica de rotação,
análoga à 2ª lei de Newton para a translação. Essa equação é
=
=
em perfeita analogia com
Se o movimento se processa em torno de um eixo, o momento angular admite uma
expressão em função do momento de inércia e, no caso deste ser constante,
podemos escrever
&ω
ω
=
=&
= &γ
em perfeita analogia com
=
. Recordemos que a grandeza γ = ω
é a
aceleração angular.
Para completar a tabela anterior, é fácil de ver intuitivamente qual é a expressão para
a energia cinética de rotação de um corpo em torno de um eixo. Basta substituir a
massa pelo momento de inércia e a velocidade pela velocidade angular
)+
* '(
=
→
)+
'(
=
&ω
Apresentamos agora a tabela anterior, já completa com as novas grandezas definidas,
comparando as grandezas físicas de translação e de rotação.
Translação
Rotação
θ
ω
γ
= ×
= ×
&=
= &ω
&ω
Tipo
Cinemática
Cinemática
Cinemática
Dinâmica
Dinâmica
Dinâmica
Dinâmica
6. O momento de inércia
6.1 Definição para sistemas de partículas e corpos simples
Quando um corpo é composto por várias partículas, cada uma com massa diferente e
a uma distância diferente do eixo de rotação, então o momento de inércia total do
corpo é simplesmente a soma dos momentos de inércia individuais de cada partícula
Cap.5-14
&=
Quando se tem uma distribuição contínua de massa, o somatório é substituído pelo
integral para cada pequena porção de massa
&=
O integral é triplo pois tem de ser efectuado para todo o volume do corpo. Devemos
=ρ
ainda recordar que, usando a definição de densidade, se tem
.
Vamos ilustrar a forma de cálculo do momento
de inércia para uma situação simples, como
seja o cálculo do momento de inércia de uma
porta, homogénea, em torno das suas
dobradiças. Vamos considerar que a porta é
plana e que tem apenas uma largura e uma
altura , como se indica na figura 15. Se for σ
a densidade superficial, isto é, a massa por
unidade de superfície, então o elemento de
tem uma massa dada por
massa
=σ
e a massa total vale
=σ
Se substituirmos agora na definição do momento de inércia, obtemos
&=
σ
=
,
=σ
=σ
=σ
=σ
=
,
O cálculo do momento de inércia para figuras geométricas simples pode ser feito da
mesma forma, resolvendo integrais de superfície ou de volume.
Cap.5-15
A figura 16 apresenta as expressões para o momento de inércia de rotação em
torno de um eixo para algumas figuras simples e diferentes eixos. Podemos
acrescentar à lista o momento de inércia de uma casca esférica, isto é, apenas a
superfície exterior de uma esfera
&=
Um fio fino, de comprimento e massa , tem um momento de inércia em relação a
um eixo perpendicular ao fio e que passa pelo centro de massa dado por
&=
Como vemos, a inércia de rotação que é medida pelo momento de inércia, depende
da massa dos objectos, mas sobretudo da forma como a massa se distribui em
torno do eixo de rotação. Por exemplo, uma bailarina ou um atleta, modificam a
forma do seu corpo, afastando ou aproximando os braços, enrolando ou esticando o
corpo, de forma a alterar o seu momento de inércia.
No caso do planeta Terra, onde o seu interior (núcleo) é muito mais denso que as
camadas exteriores (manto e crosta), o momento de inércia real é por isso menor do
que o momento de inércia de uma terra homogénea, com a mesma massa total.
6.2 Teorema dos eixos paralelos
Todos as expressões do momento de inércia que foram indicados se referem a
eixos que passam pelo centro de massa dos corpos. A razão para isto reside no
facto que o momento de inércia em relação a qualquer outro eixo paralelo a um eixo
que passe pelo centro de massa, tem um cálculo muito simples, que resulta do
teorema dos eixos paralelos. Para o deduzir, precisamos de recordar a definição de
centro de massa,
=
onde representa a massa total do sistema.
Se a origem do sistema de eixos coincide
= , logo,
com o centro de massa, então
observa-se a identidade
=
Consideremos agora uma massa
pertencente a um sistema de partículas,
situada a uma distância
do eixo )
perpendicular ao plano da figura, como se
indica na figura 17. O seu momento de inércia vale
& =
Em relação ao eixo paralelo E’, o momento de inércia vale
& =
Cap.5-16
= +
Uma vez que se tem
podemos escrever para a distância
= ⋅ =
+
⋅
+
=
+
+
⋅
Para o sistema de partículas, devemos somar para todos os componentes
&=
=
+
+
⋅ =&+
+
⋅
Se o eixo E passa pelo centro de massa, então pela propriedade enunciada
anteriormente, o último termo é nulo, simplificando-se esta relação, que passa a ser
designado pelo teorema dos eixos paralelos para o momento de inércia: se for &
o momento de inércia de um corpo em relação a um eixo que passa pelo centro de
massa, então o momento de inércia &-relativamente a um outro eixo, paralelo ao
primeiro e a uma distância dele, obtém-se pela expressão
& =&+
O momento de inércia de uma porta
Para ilustrar a aplicação do teorema dos
eixos paralelos, vamos calcular o
momento de inércia de um rectângulo de
largura a e altura b em relação a um eixo
que passa pelas dobradiças e coincide
com o eixo YY, como se indica na figura
18.
Para facilitar os cálculos, uma vez que o
corpo é homogéneo, podemos definir uma
densidade superficial como a massa por
unidade de área
σ=
=σ
→
=σ
O elemento de massa vale assim
inércia, escrevemos
&=
=
σ
=σ
. Pela definição de momento de
=σ
=σ
=σ
=
Este momento de inércia foi calculado em relação a um eixo que não passa pelo
centro de massa. O eixo paralelo que passa pelo centro de massa está a uma
distância de .
# do bordo. Aplicando o teorema dos eixos paralelos, podemos
escrever
=& =&
+
=&
+
Logo, obtemos para o momento de inércia de um rectângulo em relação a um eixo
que passa pelo seu meio a expressão
&
=
−
Cap.5-17
=
Um disco em rotação como reservatório de energia
Um disco em rotação a alta velocidade contém uma grande quantidade de energia.
Para o apreciar consideremos o seguinte exemplo. Seja um disco de massa /0 !
com um raio de #0+ rodando com uma frequência de 10222
.O
'3
momento de inércia do disco em relação ao eixo de rotação vale
&=
=
!
A frequência de rotação, em
., vale ω =
A energia cinética de rotação pode então ser colocada como
)+ =
&ω =
×
5=
!4
Por comparação, uma bateria de automóvel tem uma energia eléctrica da ordem de
%222!4" e a sua massa é de aproximadamente 15 kg. Vemos assim que um disco
de 75 kg em rotação tem uma energia que é 26 vezes superior à de uma bateria,
com uma massa que é apenas 5 vezes maior.
Podemos estimar a distância que um automóvel pode viajar com a energia do disco
considerando por exemplo um automóvel de massa 022! que se desloca vencendo
um atrito de coeficiente de atrito cinético 0.1 . A força de atrito, num plano horizontal
vale então (usando 6%2 .#)
=
+ =
O disco em rotação deve então fornecer a energia necessária para vencer a força
de atrito ao longo de um trajecto de comprimento L, que vale
4
×
=4 = +
→
=
=
=
!
+
7. O Princípio de Conservação do Momento Angular
7.1 Enunciado do princípio
Num sistema de partículas podemos
considerar dois tipos de forças, as
forças exteriores e as forças interiores,
como se ilustra na figura 19. Pela lei da
acção e reacção as forças interiores
ocorrem sempre as pares, com forças
que são simétricas e com a mesma
linha de acção. Por isso, o momento
das forças interiores é nulo
=
=
Isto significa que apenas os momentos
das forças exteriores podem fazer
variar o momento angular de um
sistema de partículas ou corpo rígido.
Cap.5-18
Daqui se deduz o princípio de conservação do momento angular: quando o
momento das forças exteriores for nula, então o momento angular de um sistema
mantém-se constante
7
=
=+
&ω = +
Este princípio permite explicar um conjunto variado de observações.
7.2 Exemplos de aplicação
Uma patinadora artística quando está em rotação sobre si própria, ela pode variar a
velocidade de rotação, variando o momento de inércia movendo os braços. As
forças exteriores são o peso e a reacção normal, que passam pelo centro de massa
da bailarina e por isso o seu momento é nulo. Sendo assim temos a conservação do
momento angular, isto é, o produto do momento de inércia pela velocidade angular
de rotação é constante. Se a bailarina reduz o momento de inércia, aproximando os
braços do corpo, a velocidade de rotação deve aumentar. Pelo contrário, quando a
bailarina afasta os braços do corpo, havendo conservação do momento angular, a
velocidade de rotação deve diminuir.
A mesma interpretação deve ser feita para os ginastas e atletas que efectuam saltos
com piruetas. No ar a única força exterior aplicada aos atletas é o peso cujo ponto
de aplicação é o centro de massa. Por isso o momento desta força em relação ao
centro de massa é nulo e deve haver conservação do momento angular. Sendo
assim, quando o atleta se enrola sobre si próprio ele diminui o seu momento de
inércia e, por consequência, aumenta a sua velocidade de rotação. O atleta obtém o
efeito oposto quando estica o corpo. Devemos recordar que a deformação do corpo
é feita por forças internas que não entram na contabilidade do momento angular do
sistema de partículas.
A duração do dia, isto é, o período de rotação da Terra, de valor 23 h 56 m, é muito
variável a uma escala que é hoje mensurável, graças aos instrumentos de medida
do tempo que dispomos hoje em dia. Por exemplo, o sismo de Samatra de 26 de
Dezembro de 2004, com uma magnitude de momento estimada de 9.3, provocou
uma alteração da forma da Terra, tornando-a mais redonda. Este efeito é análogo
ao de uma bailarina que aproxima os braços do corpo, isto é, provocou uma
diminuição no momento de inércia do Globo. Por isso, uma vez que as forças em
jogo foram forças internas, o momento angular do planeta manteve-se constante e
por consequência a redução do momento de inércia correspondeu a um aumento da
frequência de rotação do Globo. Como o período é o inverso da frequência, tivemos
como consequência uma diminuição do período de rotação, uma diminuição da
duração do dia que se estima em #"
81µ (Eos,Vol. 86, No. 1, 4 Janeiro 2005, pp 12). Este valor está no limiar de detecção das técnicas actuais.
Um outro processo que afecta a duração do dia é a circulação atmosférica. Se
considerarmos apenas as componentes sólida e gasosa do globo, este é composto
por dois elementos e o seu momento angular é a soma de ambos os momentos
angulares em relação ao eixo de rotação da Terra
Cap.5-19
=
*
= & *ω
+
*
+& ω
Havendo conservação do momento angular, um aumento da circulação atmosférica
deverá ter como consequência uma diminuição da rotação do globo sólido e, por
consequência, um aumento do período de rotação ou seja, um aumento da duração
do dia. Pelo contrário, uma diminuição da circulação atmosférica irá provocar uma
diminuição da duração do dia. Este efeito é mensurável e explica a variabilidade que
é observada na duração do dia.
8. A dinâmica de Rotação das Placas Tectónicas
8.1 Rotação das placas e referenciais absolutos
As placas tectónicas são corpos rígidos com a forma de cascas esféricas que são
actuadas por forças, aplicadas no seu interior e também nas suas fronteiras. Uma
vez que as placas têm o seu movimento confinado à superfície da Terra, vimos já
que num globo esférico este movimento se descreve por uma rotação em torno de
um eixo, é o Teorema de Euler que foi visto no capítulo 2, cinemática. Por isso, a
equação dinâmica que rege as placas tectónicas é a dinâmica de rotação, e a acção
das forças é traduzida por momentos
)
=
=&
ω
Esta segunda equação é válida desde que o momento de inércia da placa em
relação ao eixo de rotação não sofra alteração.
As observações dos movimentos das placas no seu passado geológico têm
mostrado que estas se movem durante longos períodos de tempo com uma
velocidade aproximadamente constante, interrompida por curtos períodos onde se
dá uma variação rápida. São os momentos de reorganização da tectónica de placas.
Podemos por isso dizer que à escala geológica do milhão de anos, o movimento das
placas se processa com velocidade angular constante
ω * + ≈+
Esta observação tem uma consequência extremamente importante sobre a
dinâmica das placas. Ela implica que a soma dos momentos das forças aplicadas é
nula e que por isso o momento angular das placas se deve manter constante
ω * + ≈+
) =
* + =+
Dito de outra maneira, as placas tectónicas estão em equilíbrio de rotação.
Por consequência, as placas tectónicas ou não têm rotação, ou têm uma rotação
com um movimento uniforme em torno de um eixo. Esta propriedade tem permitido
aos geofísicos definir um referencial para medir a velocidade de todas as placas
que, pelo seu fundamento físico, se aproxima do ideal de “referencial absoluto” para
as placas. Este referencial é designado pelas letras NNR de “No-Net-Rotation” por
ser precisamente aquele referencial em que o movimento de rotação de todas as
placas do globo é nulo.
Cap.5-20
Um outro referencial “absoluto” habitualmente usado é o referencial dos “hotspots”
ou referencial dos pontos quentes. Neste contexto devemos entender como
movimento “absoluto” um movimento que seja referenciado em relação ao manto
inferior, cujo movimento se crê ser muito lento, mesmo em relação ao movimento
das placas. Admitindo que os “hotspots” são manifestações superficiais de plumas
mantélicas cuja origem está no manto profundo, elas podem ser por isso usados
como pontos de referência marcando a posição desse referencial ideal. Esta
descrição simplista é hoje muito contestada na comunidade científica com dois
campos opostos muito fortes na sua argumentação científica. De qualquer forma, a
evidência de movimentações relativas importantes entre os “hotspots” presentes em
diferentes oceanos tem diminuído o possível significado “absoluto” a eles ligado.
Os valores exactos das forças que actuam sobre as placas tectónicas são pouco
conhecidos por observação directa, no entanto as propriedades físicas dos materiais
envolvidos permitem fazer dessas forças uma boa estimativa. Como iremos ver de
seguida, existem forças aplicadas às placas que dependem da velocidade relativa
das placas em relação ao manto. O valor dessas forças depende por isso do
referencial que é usado para medir as velocidades das placas. É por isso possível
estimar um referencial para o qual se observe de facto a equação de equilíbrio de
rotação,
) =
Este é também um referencial candidato a “referencial absoluto”, pelo seu
fundamento físico, e é designado por “referencial de momento nulo”. Devido à
dificuldade nos eu cálculo, o seu uso não é muito comum.
8.2 As forças que actuam as placas tectónicas
Neste parágrafo vamos discutir a importância relativa das diferentes forças que
actuam sobre as placas tectónicas. A questão mais importante a responder é “qual é
a principal força responsável pelo movimento das placas?”. Se esta pergunta for
feita aos cientistas da Terra, Geólogos e Geofísicos, ou se procurarmos a resposta
nos livros de divulgação ou da especialidade, a resposta maioritária é “a convecção
no manto”. A nossa perspectiva é diferente e tentaremos ilustrá-la brevemente já em
seguida.
Em primeiro lugar, devemos recordar que o movimento das placas se processa com
velocidade angular constante, o que significa que o efeito global de todas as forças
é nulo. Isto é, a soma das forças potentes deve ser igual à soma das forças
resistentes. Por isso, se identificarmos uma força “motora” principal, devemos
também identificar as forças que se lhe opõem exactamente com o mesmo vigor.
Uma vez que as forças resistentes são forças de atrito e o seu efeito depende da
velocidade (atrito viscoso e não o atrito sólido que estudámos anteriormente), a
identificação das forças motoras mais importantes pode ser feita tentando associar
as velocidades “absolutas” das placas com as possíveis causas para o seu
movimento.
Em segundo lugar devemos considerar que há forças que actuam nas fronteiras de
placas, e que são por isso proporcionais ao comprimento dessas fronteiras,
Cap.5-21
enquanto que há forças que actuam no interior das placas e que por isso deveriam
estar relacionadas com a sua superfície. A figura 20 mostra as principais forças que
se consideram aplicadas às placas tectónicas. De fora fica apenas a força resistente
de colisão continente-continente que dá origem à formação de cadeias de
montanhas.
A tabela seguinte identifica cada uma das forças e caracteriza-as quanto ao ponto
de aplicação e ao seu efeito no movimento das placas.
Força
FRP
FAO
FAC
FC
FSP
FT
FAS
FST
Nome
“Ridge-Push”
Empurrão da dorsal
Atrito nos oceanos
Aplicação
Ao longo das dorsais
fronteiras divergentes
Em toda a superfície
oceânica da placa
Atrito nos continentes
Em toda a superfície
continental da placa
Força de colisão
Ao longo das zonas de subducção
fronteiras convergentes
“Slab-Pull”
Em toda a área da placa em
Puxão da subducção subducção, fronteiras convergentes
Força nas
Ao longo das falhas transformantes
transformantes
fronteiras conservativas
Atrito na subducção
Em toda a superfície da placa
em subducção no manto
Força de sucção na
Ao longo das zonas de subducção
trincheira
fronteiras convergentes
Tipo
Motora
???
???
Resistente
Motora
Resistente
Resistente
Motora
A força FRP, o empurrão da dorsal, é uma força que resulta da elevação topográfica
dos fundos oceânicos na vizinhança das dorsais. A placa litosférica, por estar mais
elevada nessa região, tem tendência a “cair”, escorregando sobre a astenosfera que
está por baixo, como se fosse um plano inclinado.
As forças que são genericamente designadas por “convecção do manto” de facto
traduzem a acção das astenosfera e manto sub-litosférico sobre as placas
Cap.5-22
tectónicas. Na figura essas forças estão identificadas como FAO e FAC deixando o
seu nome e direcção antever qual é a opinião aqui tomada relativamente ao seu
carácter, motor ou resistente. No entanto, deixaremos por enquanto esse campo em
branco na tabela anterior.
As forças que actuam nas zonas de subducção, força de colisão FC, e as forças que
actuam nas falhas transformantes, são claramente forças resistentes, embora de
importância, talvez reduzida. Nas zonas de subducção existe uma força motora, FST
a sucção na trincheira, que é responsável por muitos elementos que se encontram
nas placas oceânicas, como os arcos insulares e divergência “back-arc”, mas a sua
importância para a movimentação global das placas deve ser reduzida.
O puxão da subducção, “slab-pull” ou FSP, é uma força extremamente importante
que actua sobre as placas em subducção. Ela resulta do facto da litosfera oceânica
ser mais fria e por isso mais densa que o manto subjacente, criando por isso uma
forte instabilidade gravítica. É este peso adicional da placa fria que dá origem a esta
força. Quando encontra uma abertura, a placa afunda-se pelo seu próprio peso, sem
precisar de ajuda. Na opinião de alguns cientistas, esta é a principal força
responsável pela movimentação das placas. Quando a placa entra em subducção
ela irá penetrar num manto cada vez mais viscoso com a profundidade. É por isso
natural que a força de resistência ao movimento das placas seja mais importante em
profundidade do que na astenosfera. Esta força de resistência no manto mais
profundo é identificada como FAS ou força de atrito na subducção.
Sem ser exaustivos, iremos agora apresentar alguns argumentos que nos permitem
inferir a importância relativa de cada uma das forças identificadas, seguindo a
1
discussão feita por Cox e Hart (1986) .
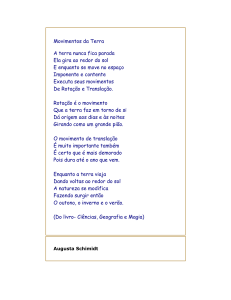
Relativamente às forças existentes
na base do manto, a “convecção do
manto”,
elas
devem
ser
proporcionais à área das placas pois
actuam sobre toda a superfície.
Vejamos qual a relação que existe
entre a velocidade das placas e a
sua área, dada na figura 21. Como
se pode observar, não há nenhuma
relação
clara.
Temos
placas
grandes que são rápidas, temos
placas grandes que são lentas e
temos placas pequenas que são
rápidas. Esta figura não prova nem
rejeita a possibilidade destas forças
serem forças motoras, embora lance
alguma dúvida.
! "# $
Figura 21
%
Cap.5-23
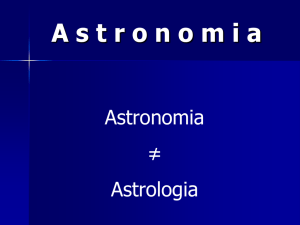
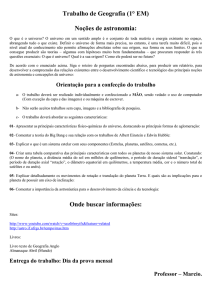
Se considerarmos apenas a área
continental das placas, como se
mostra na figura 22, então já há um
padrão que parece emergir. De facto,
se retirarmos a Índia, todas as placas
com um domínio continental extenso
estão do lado das placas lentas. Esta
figura sugere que a acção do manto
por baixo dos domínios continentais é
uma acção resistente e não motora,
como prevê o modelo “clássico” da
tectónica de placas. Se atendermos a
que a espessura da astenosfera,
camada do manto com uma baixa
viscosidade situada imediatamente
por baixo da litosfera, é reduzida ou
mesmo nula por baixo dos continentes, é fácil de perceber que neste caso as placas
ficam em contacto com um meio mais viscoso e logo a força de atrito será maior.
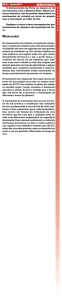
Na figura 23 apresentamos a
comparação entre a velocidade das
placas e a dimensão das falhas
transformantes nas suas fronteiras.
Como vemos não há nenhuma
relação aparente. A força de
resistência nas falhas transformante
não parece ter um grande papel na
dinâmica das placas tectónicas.
Para estudar o efeito do “empurrão
da dorsal” devemos estudar a relação
que existe entre a velocidade
“absoluta
das
placas”
e
o
comprimento total das dorsais
existentes nas fronteiras divergentes.
No entanto, existem placas com
dorsais de ambos os lados e por isso
será natural que os efeitos destas
dorsais se cancelem. Por isso, na
figura 24 apresenta-se a relação
entre o comprimento total (a
tracejado) e o comprimento não
compensado das dorsais, que
exprime precisamente o comprimento
de dorsal que não é contrariada por
uma dorsal no lado oposto. Nesta
figura é aparente alguma relação
entre
o
comprimento
não
compensado da dorsal e a velocidade
das placas. Podemos assim sugerir que o “empurrão da dorsal” é uma força motora
Cap.5-24
importante, mas não a força mais significativa.
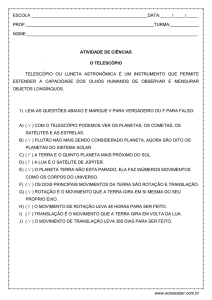
Para estudar a importância do
“puxão da dorsal” ou “slab-pull”
também
devemos
considerar
apenas o comprimento não
compensado
das
fronteiras
convergentes. A relação entre este
comprimento e a velocidade das
placas está ilustrado na figura 25.
Aqui
podemos
identificar
claramente dois grupos de placas
tectónicas, as que têm zonas de
subducção são rápidas e as que
não têm são lentas. Este é um dos
argumentos que é usado para
justificar que o “puxão da dorsal” é
a principal força motora da
tectónica de placas. Como vimos na introdução a esta discussão, se encontramos a
força motora mais importante, ela deve ser contrariada por uma força resistente
igualmente importante. A força resistente mais significativa que resiste ao
movimento de queda da placa em subducção deve ser a força de atrito no manto
mais profundo e mais viscoso. O balanço de forças é feito na placa em subducção
mas tem como consequência uma elevada velocidade no movimento das placas.
Que é feito então da convecção do manto? Não há dúvidas relativamente à
existência desta convecção, mas neste modelo dinâmico, esta convecção em vez de
ser controlada por baixo, arrastando as placas consigo de forma passiva, é ao
contrário dirigida por cima, isto é, é a movimentação das placas que faz mover o
manto por arrastamento. Este modelo encontra-se ilustrado no esquema da figura
26.
Figura 26 – Esquema alternativo para a convecção do manto
Neste modelo existem duas formas de convecção. O primeiro modo de convecção é
aquele que está associado à movimentação das placas. As correntes descendentes
no manto estão associadas às zonas de subducção mas não existem correntes
Cap.5-25
ascendentes organizadas. O movimento ascendente é difuso, disperso por uma
superfície bastante larga, e o que se passa nas dorsais é um movimento
ascensional passivo. As placas afastam-se e o manto sobe para compensar o
espaço vazio. Este efeito é superficial e não tem nenhuma raiz profunda. Não
existem células de convecção típicas como as que se vêm em todos os livros de
estudo.
A segunda forma de convecção está associada às plumas mantélicas. Apesar de
serem postas em causa hoje em dia, parece ser possível verificar que pelo menos
alguns dos “hotspots” que se observam hoje à superfície da Terra têm uma origem
profunda, ou na descontinuidade dos 600 km, ou na descontinuidade entre o núcleo
e o manto. Este modo de convecção é secundário relativamente à cinemática de
placas, embora de grande importância no estudo do vulcanismo.
8.3 A energia cinética de rotação das placas tectónicas
Sabendo que as placas devem ser consideradas como corpos rígidos, podemos
proceder agora ao cálculo da sua energia cinética média, corrigindo o método usado
no final do capítulo 4. Vamos por isso neste parágrafo usar a expressão da energia
cinética de rotação
)+ =
&ω
Considerando como antes que a velocidade média das placas vale %2+ . , isto é,
= +
=
× −
então a velocidade angular média das placas pode ser obtida como
ω=
= ×
−
Para calcular o momento de inércia da placa, usaremos a expressão que é válida
para uma casca esférica que roda em torno de um eixo que passa pelo seu centro
&=
Para a massa das placas usaremos o mesmo valor que foi deduzido anteriormente,
a partir de uma densidade média e de um volume calculado com uma espessura
litosférica de /2!
=ρ = ×
!
Substituindo este valor na expressão do momento de inércia obtemos
&=
×
!
A energia cinética de rotação vale então
)+ = ×
5=
!5
Este valor é um pouco inferior ao valor estimado anteriormente, considerando um
5=
!5 .
movimento de translação para as placas )+ = ×
Cap.5-26
9. Dinâmica de rotação num plano inclinado
9.1 O falcão de Malta
O “Falcão de Malta” é o título de um filme, protagonizado por Humphrey Bogart, que
faz o papel de um detective privado em busca de uma relíquia de ouro muito
preciosa, do tempo dos Templários. No final, após várias peripécias, vem-se a
descobrir que a relíquia afinal era uma falsificação feita de chumbo maciço. Esta
história serve de pano de fundo para o seguinte problema.
Temos à nossa disposição
dois
cilindros
dourados,
exactamente com a mesma
massa. Um é de chumbo
maciço e pouco valioso,
enquanto que o outro é de
ouro e oco, como se mostra
na figura 27. Uma vez que
externamente
os
dois
cilindros são idênticos, uma
forma não destrutiva e
simples de os identificar é a
de usar a propriedade que
os destingue, a forma como
a massa se distribui em torno do seu eixo de simetria. Como sabemos, esta
distribuição de massa influencia o momento de inércia dos corpos e por isso
podemos dizer que o cilindro de ouro tem um momento de inércia maior enquanto
que o de chumbo tem um momento de inércia menor
&
=
+
>
&
=
Para por em evidência a diferença dos momentos de inércia podemos deixá-los rolar
por um plano inclinado, sem escorregamento. Devido às diferenças nos momentos
de inércia os cilindros não irão cair em simultâneo. Qual é o cilindro de ouro? O
primeiro a chegar ao fim do plano ou o segundo?
Para responder a esta questão vamos calcular a velocidade final de queda de um
cilindro usando a conservação da energia mecânica. Este princípio pode ser
aplicado pois não existe atrito cinético, o cilindro roda sem escorregar. O ponto de
contacto do cilindro com o plano está em repouso e a força de atrito que aí actua é o
atrito estático que não realiza trabalho. As restantes forças que actuam são o peso,
que é conservativa, e a reacção normal, que não realiza trabalho.
Devemos então igualar as energias mecânicas no topo e na base do plano
inclinado, tendo no entanto em consideração que o corpo rígido tem uma energia
cinética de translação e também uma energia cinética de rotação. Escrevemos
então
)
=)
→
Cap.5-27
=
+ &ω
Para usarmos esta expressão,
devemos primeiro determinar qual a
relação
que
existe entre a
velocidade de translação do centro
de massa e a velocidade de rotação
do corpo em torno do centro de
massa. Para este efeito devemo-nos
socorrer da figura 28 onde se
mostra um pequeno deslocamento
de um cilindro em rotação, sem
escorregar, sobre um plano.
O disco 1 representa a posição inicial e o disco 2, a cheio, a posição final. O disco
desloca-se da direita para a esquerda. Neste movimento o centro de massa sofreu
um deslocamento de translação ∆ . No mesmo intervalo de tempo, o ponto de
contacto P passou para a posição P’, sofrendo por isso um deslocamento escalar
∆
a que corresponde um deslocamento angular ∆θ . Não havendo
escorregamento, o deslocamento do centro de massa deve ser idêntico ao
deslocamento do bordo do disco no mesmo intervalo de tempo. Usando a relação
entre o arco de circunferência e o ângulo ao centro, obtemos a identidade.
∆ = ∆ = ∆θ
Dividindo ambos os termos da equação por ∆ e tomando o limite quando ∆ →
obtemos uma relação entre as respectivas derivadas, isto é, uma relação entre as
velocidade de translação do centro de massa e a velocidade angular de rotação em
torno do centro de massa
=
θ
=ω
→
ω=
Podemos agora substituir esta última expressão na equação de conservação da
energia mecânica para obter
&
=
+ &
→
+
=
Tem-se então finalmente uma expressão para a velocidade de um cilindro na base
do plano inclinado dada por
=
+
&
Aplicando esta expressão ao nosso problema, onde dispomos de dois cilindros
exactamente com as mesmas dimensões e mesma massa, verificamos que, como o
momento de inércia figura em denominador, quanto maior for o momento de inércia,
menor será a velocidade de queda do cilindro
& >&
<
O cilindro com a queda mais lenta é o cilindro de ouro, o mais precioso. De facto,
como o cilindro de ouro tem um momento de inércia maior que o de chumbo, a
repartição da energia potencial pelas energias cinéticas de translação e de rotação
deve dar uma quantidade maior à rotação do que à translação (em comparação com
o cilindro de chumbo).
Cap.5-28
9.2 Aceleração de um cilindro em queda
Vamos agora estudar a queda de um
corpo cilíndrico por um plano
inclinado. O corpo rola sem escorregar
pela superfície, o que significa que o
ponto de contacto do cilindro com o
plano está fixo. A força de atrito aí
aplicada é uma força de atrito estático,
mas não atrito estático máximo, pelo
que o seu valor é desconhecido. As
restantes forças aplicadas sobre o
cilindro são o peso, aplicado no centro
de massa (centro geométrico) e a
reacção normal, também aplicada no
ponto de contacto do cilindro com o
plano (figura 29).
Como resultado da acção destas 3
forças o cilindro tem um movimento de
translação do seu centro de massa
e também
com uma aceleração
um movimento de rotação acelerado
em torno do centro de massa, com
uma aceleração angular γ . Vimos já
no parágrafo anterior, e por isso não
vamos repetir, que no movimento de
um cilindro sobre um plano sem
escorregar se tem a igualdade entre
as grandezas escalares
=ω
Se derivarmos esta expressão em ordem ao tempo teremos
=γ
→
γ=
Sabemos que o centro de massa de um corpo rígido tem um movimento de
translação regido pela 2ª lei de Newton, como se todas as forças aí estivessem
aplicadas e toda a massa aí estivesse concentrada. Usando o diagrama de forças
da figura 29b, podemos escrever
=
→
+ + =
Usando o sistema de eixos da figura 29b podemos escrever o sistema de equações
−
α− =
→
−
α=
=
α
A 1ª das equações não tem solução pois temos uma equação com duas incógnitas,
o valor da aceleração do centro de massa e o valor do atrito.
Para resolver esta indeterminarão devemos usar a equação da dinâmica de rotação
Cap.5-29
=&
ω
= &γ
Os momentos e o vector aceleração angular são vectores perpendiculares ao plano
da figura e para eles vamos considerar o sentido positivo aquele que é indicado com
uma seta na figura 29a. Os momentos são calculados em relação ao ponto O que
coincide com o centro de massa, usando o método expedito que se aplica quando
todas as forças estão no mesmo plano.
Uma vez que as linhas de acção da reacção normal e do peso passam pelo ponto
O, os seus momentos são nulos (figura 29). Sobra apenas o momento do atrito que
é positivo. O braço do atrito é igual ao raio do disco (figura 29). Podemos assim
escrever
=
=
=
A equação da dinâmica de rotação do disco escreve-se então
= &γ = &
Daqui podemos tirar a expressão para a força de atrito
=&
Substituindo na equação anterior para a dinâmica de translação do centro de massa
temos
&
α
α −&
=
→
α=
+
→
=
&
+
Na dinâmica do ponto material, o corpo não tem dimensões e o momento de inércia
é nulo. Nessas circunstâncias a equação anterior dá o mesmo resultado que se
=
α . Quanto maior for o momento
obteve na dinâmica do ponto material,
de inércia do corpo cilíndrico, para a mesma massa, menor será a aceleração de
queda do corpo. A mesma conclusão a que tínhamos chegado antes por outra via,
ao estudar o problema do “Falcão de Malta”.
Cap.5-30