Congresso de Inovação, Ciência e Tecnologia do IFSP - 2016
SISTEMA DE LOCALIZAÇÃO POR TRIANGULAÇÃO ULTRASSÔNICA
PRISCILA M.V. KOMATSU 1, ALEXANDRE B. CAMPO2
1
2
Graduando em Engenharia de Controle e Automação, Bolsista PIBIFSP, IFSP, câmpus São Paulo, [email protected]
Professor do Departamento de Elétrica do Instituto Federal de São Paulo, câmpus São Paulo, [email protected]
Área de conhecimento (Tabela CNPq): Sistemas Eletrônicos de Medida e de Controle – 3.04.02.05-0
Apresentado no
7° Congresso de Iniciação Científica e Tecnológica do IFSP
30 de novembro a 02 de dezembro de 2016 - Matão-SP, Brasil
RESUMO: Este trabalho tem como objetivo a pesquisa e desenvolvimento de um equipamento
eletrônico; capaz de localizar um objeto móvel em um perímetro limitado, utilizando um sinal de
ultrassom, um algoritmo de triangulação como base para dimensionar a posição do objeto que se
deseja localizar. Esta pesquisa se divide em três partes principais; o hardware (sensores ultrassônicos,
desenvolvido com componentes comuns no mercado e de baixo custo), o algoritmo de triangulação e
por fim, o software de interface dados – usuário (utilizado uma versão estudante do software
profissional LabView), que tem como função a exposição da localização do objeto ao usuário. Foram
coletadas as medidas das distâncias captadas pelo hardware e os valores de tensão do sinal
interpretado pelo software, sendo então apresentadas de forma gráfica. Considerando este trabalho
ainda em andamento, espera-se desenvolver um sistema de baixo custo, que tenha boa confiabilidade
em pequena e médias distâncias.
PALAVRAS-CHAVE: determinar posição; transdutor ultrassônico; localização de um objeto.
LOCATION SYSTEM BY ULTRASONIC TRIANGULATION
ABSTRACT: At this work is presented the development of an electronic equipment capable of
locating a moving object in a limited area, using ultrasound, and a triangulation algorithm as the basis
to scale the position of the object if you want to find. This research is divided into three main parts; the
hardware (ultrasonic sensors, developed with common components on the market and cost), the
triangulation and finally algorithm, data interface software - user (used one student version of
professional software LabView), whose function is the display of the user object location. The
measurements of the distances captured by the hardware and the signal voltage values interpreted by
the software, shown graphically was collected. Since this work is still in progress, it is expected to
develop a low-cost system that would have a good reliability in a small and medium distances.
KEYWORDS: determine position; ultrasonic transducer; location of an object
INTRODUÇÃO
Para controlar algum objeto e sua movimentação, podendo esse objeto ser um robô, muitas vezes é
necessário saber sua localização num espaço tridimensional (BEDI et al., 2009). Para isso este
trabalho tem como meta a criação de um hardware microcontrolado que possa determinar essa
localização, tendo como base pontos fixos de referência ao seu redor (ABDULLA et al., 2001).
Para o hardware, um elemento viável a ser explorado é a velocidade de propagação do som ser
igual a 343 m/s (HALLIDAY,2006), basta que o objeto emita um sinal de ultrassom, e com base na
diferença de tempo em que os receptores de referência captam o som é possível determinar a sua
distância em relação a ele. Utilizando transdutor ultrassônico fabricado a partir de material
piezoelétrico, e com o circuito eletrônico apropriado, pode se alcançar até 100m de distância entre dois
pontos
(BALBINOT e BRUSAMARELLO, 2007).
MATERIAL E MÉTODOS
Procurou-se montar o circuito eletrônico com componentes de baixo custo e que se encontrasse
facilmente no mercado. Assim os componentes escolhidos para o transdutor ultrassônico, foram o
microfone de eletreto, e a cápsula piezoelétrico. Como o sinal gerado por eles é de baixa tensão, foi
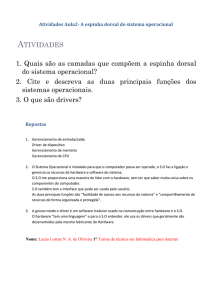
necessário implementar um circuito amplificador AmpOp (CAPUANO et al., 2010). O esquema elétrico
do emissor e receptor estão sendo mostrada na figura 1.
Figura 1. Circuito eletrônico emissor e receptor de ultrassom (CAPUANO et al., 2010).
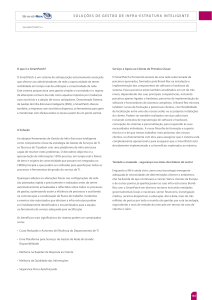
O objeto poderá ser posicionado dentro de uma área inicial de 3x3 metros quadrados, os receptores
ultrassônicos serão posicionados ao redor dele. No objeto será acoplado um emissor ultrassônico, em
que sua frequência de operação será acima da frequência audível, ou seja acima de 20 kHz
(PILLING, 2011). Como mostra a figura 2.
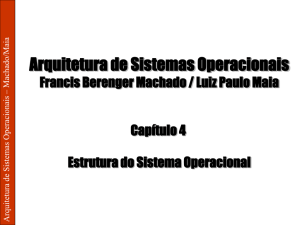
Além do emissor e do receptor, há uma central, placa de aquisição de dados que vai receber os
tempos de emissão e recepção, como mostra na figura 3. E através da diferença de tempo dos dois,
aplicando na equação da velocidade (1). Obtêm-se a distância entre eles.
Figura 2. Representação do posicionamento dos receptores e do objeto
Figura 3 – Representação da transmissão entre emissor/receptor com a central
Sendo o valor da velocidade do som no ar a 20 ºC, ser igual a 343 m/s (HALLIDAY,2006), a distância
entre os dispositivos Rx e Tx pode ser estimada por meio da seguinte equação (1):
(1)
em que,
– variação da distância, m;
– velocidade do som, m/s;
- variação de tempo, s .
Fonte: (HALLIDAY,2006)
RESULTADOS E DISCUSSÃO
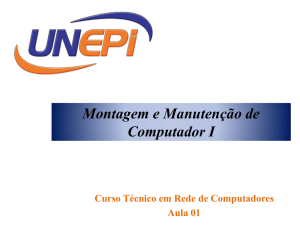
Abaixo a relação da distância pela tensão do sinal captado pelo receptor, com um comprimento
máximo de 2 m. A pesquisa está em andamento, e espera-se uma boa precisão na determinação do
local onde se encontra o objeto.
CONCLUSÕES
O sistema composto pelo hardware e pelo software está em fase de teste, tendo possibilitado a
emissão e a recepção do sinal em uma distância de até quatro metros. Espera-se conseguir um maior
alcance, viável financeiramente e com baixo peso, para isso empregou-se como transdutores
ultrassônicos a capsula piezoelétrica em alta frequência e o microfone de eletreto. Pretende-se também
estudar meios de aumentar o alcance através da codificação do sinal emitido, melhorando a relação
sinal ruído.
AGRADECIMENTOS
Agradeço ao IFSP- Campus São Paulo, pelo financiamento do projeto e ao Prof. Dr. Alexandre
Brincalepe Campo, por ser meu orientador.
REFERÊNCIAS
ABDULLAH, Y.A. EL-HENNAWY, H. ; MAHROUS, S. Em : The effect of base stations
configurations on the accuracy of hyperbolic position location in macrocellular and
microcellular GSM systems. Proceedings of the Eighteenth National Radio Science Conference,
NRSC 2001. (Volume:1 ), 2001.
BALBINOT, ALEXANDRE; BRUSAMARELLO, VALNER J. Em : Instrumentação e
Fundamentos de Medidas. Rio de Janeiro: LTC,2007, capítulo 8, pág 9. ISBN 9788521615637
Volume 2.
BEDI, H. ; BOSCO, M.S.D. ; SHASHIDHAR, V . Accuracy of 3D location computation in
GSM through NS2 , First International Conference on Networks and Communications, NETCOM
'09, 2009.
CAPUANO, FRANCISCO G.; MARINO, MARIA A. M. Em : Laboratório de Eletricidade
e Eletrônica - Teoria e prática. 24° edição, Ed Érica, 2010.
HALLIDAY, DAVID; RESNICK, ROBERT; WALKER, Jearl. Fundamentos de física:
Gravitação, Ondas e Termodinâmica. 7. ed. Rio de Janeiro: LTC, 2006. 4 v. ISBN 97885216148452 Volume 2.
PILLING S. Em: Apostila de Biofísica – Ondas, som e introdução a bioacústica.
Universidade do Vale do Paraíba – UNIVAP, capítulo 3, pág 15, 2011. Disponível em:
http://www1.univap.br/spilling/BIOF/BIOF_04_Ondas,%20som%20e%20bioacustica.pdf Acesso em:
24 abril, 2016, às 16:10h