Capítulo 2
CINEMÁTICA DE UM SISTEMA DE PARTÍCULAS
2.1 INTRODUÇÃO
Por sistema de partículas, ou sistema de pontos materiais, designa-se um
conjunto finito ou infinito de partículas, de tal modo que a distância entre qualquer
dos seus pontos permanece invariável durante o movimento. Isto significa que
apenas se irá considerar sistemas de partículas rígidos.
O sistema constituído por um número discreto ou finito de partículas é
vulgarmente designado por sistema de partículas discreto ou simplesmente por
sistema de partículas.
O sistema constituído por um número infinito de partículas é vulgarmente
designado por sólido.
Note-se que a noção de corpo rígido é uma abstracção científica porque na
realidade se sabe que não existem corpos completamente indeformáveis.
Neste capítulo será abordado a cinemática de corpos rígidos, investigando-se
as relações existentes entre o tempo, as posições, as velocidades e as acelerações
das várias partículas que formam um corpo rígido.
Os vários tipos de movimento de corpos rígidos podem ser agrupados da
seguinte maneira:
• Movimentos simples
– Translação:
48
quando qualquer linha recta no interior do corpo
se mantiver na mesma direcção durante o
movimento.
Capítulo 2
– Rotação (em torno de um eixo fixo): as partículas movem-se em
planos paralelos e segundo circunferências em
torno do mesmo eixo fixo, designado por eixo de
rotação (as partículas situadas nesse eixo têm
velocidade e aceleração nulas).
• Movimentos compostos
– Movimento plano geral: todas as partículas se movem em planos
paralelos podendo, os seus movimentos, ser
decompostos nos dois movimentos simples
(translação e rotação).
– Movimento em torno de um ponto fixo: trata-se de um
movimento tridimensional de um corpo rígido
ligado num ponto fixo (por exemplo, o
movimento de um pião numa superfície rugosa).
– Movimento geral: qualquer movimento de um corpo que não se
enquadre em nenhum dos anteriores.
2.2 MOVIMENTO DE TRANSLAÇÃO
2.2.1 Definição e características
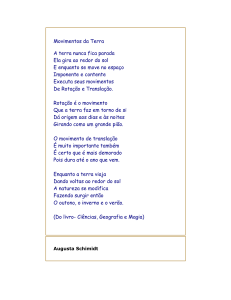
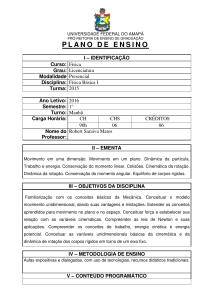
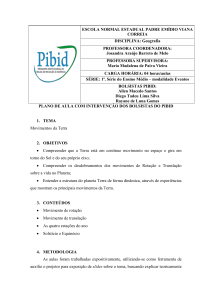
Considere-se um sistema de
partículas em movimento e
sejam A e B duas partículas
quaisquer. No instante de
tempo t, os vectores posição de
A e B em relação a um sistema
de referência fixo designam-se
r
r
por rA e rB , respectivamente,
r
designando rB / A o vector que
liga A a B.
Figura 2.1 – Movimento de translação.
49
Cinemática de um sistema de partículas
r
r
Assim, o vector posição rB pode ser obtido a partir do vector posição rA , se
r
for conhecido rB / A , da seguinte maneira:
r
r
r
rB (t ) = rA (t ) + rB / A (t )
(2.1)
Se o movimento do sistema de partículas é de translação (rectilínea ou
r
curvilínea), então o vector rB / A tem direcção e grandeza constante. Isto é, um
segmento que une dois pontos quaisquer de um sistema de partículas em movimento
de translação mantém-se com um comprimento constante e paralelo a si mesmo.
Derivando a expressão (2.1) em ordem ao tempo, t, vem:
r
r
r
r
drB drA drB / A
vB =
=
+
dt
dt
dt
(2.2)
r
r
r
tendo em conta que rB / A é constante no tempo, portanto, drB / A dt = 0 , e
r
r
v A = drA dt , então:
r
r
vB = v A
,
∀A, B
(2.3)
portanto, num sistema de partículas em translação, a velocidade é igual em todos os
pontos.
Derivando uma vez mais:
r
r
aB = a A
,
∀A, B
(2.4)
identicamente, a aceleração é igual em todos os pontos.
Assim, quando um sistema de partículas se encontra em translação, todos os
pontos do corpo têm, em qualquer instante, a mesma velocidade e a mesma
aceleração. Portanto, a caracterização cinemática do movimento de translação de
um corpo rígido é a mesma para uma partícula qualquer desse corpo.
50
Capítulo 2
2.2.2 Casos particulares do movimento de translação
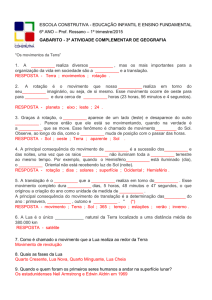
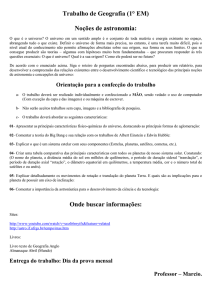
1º caso) Translação com velocidade vectorial instantânea constante
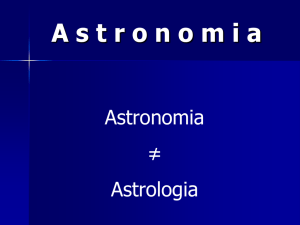
Se em qualquer instante t, a velocidade é
constante em direcção, sentido e grandeza
em todos os pontos do corpo rígido, isto é:
r
∀t , A, B : v (t ) = constante
(2.5)
Figura 2.2 – Translação rectilínea e
uniforme.
então as trajectórias de todos esses pontos são rectilíneas. Neste caso, o
movimento é designado de translação rectilínea e uniforme.
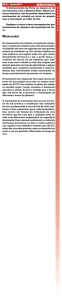
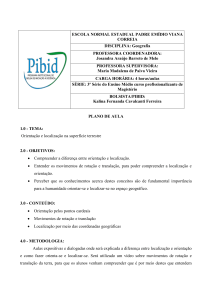
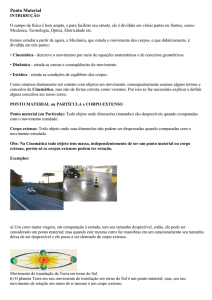
2º caso) Translação com velocidade vectorial instantânea constante em
grandeza – Translação curvilínea
Como só a grandeza da velocidade é
constante, isto é:
∀t , A, B :
r
v (t ) = constante
(2.6)
então o sentido e a direcção podem variar.
Figura 2.3 – Translação uniforme
curvilínea.
Neste caso, o movimento é designado de translação uniforme curvilínea.
3º caso) Translação com velocidade vectorial instantânea não constante
Neste caso, como a velocidade é variável no tempo, a translação diz-se
variável.
51
Cinemática de um sistema de partículas
2.3 MOVIMENTO DE ROTAÇÃO (EM TORNO DE UM EIXO FIXO)
2.3.1 Definição e características
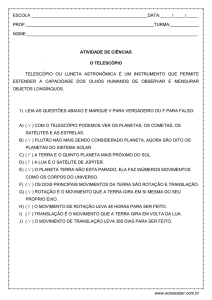
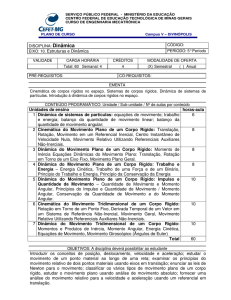
Diz-se que um sólido executa um movimento
de rotação quando existem pontos de uma
dada linha recta, ∆, que se encontram fixos
(em repouso) durante o movimento. A esta
direcção, ∆, de pontos fixos dá-se o nome de
eixo de rotação.
Todas as partículas que não se encontram
sobre o eixo de rotação descrevem uma
trajectória circular cujo plano é normal ao
eixo e cujo centro se situa sobre esse eixo.
Figura 2.4 – Rotação em torno de um
eixo fixo.
Portanto, todas as partículas do corpo rígido têm a mesma velocidade angular
no mesmo instante, podendo, todavia, ser diferente de instante para instante.
Por isso, o movimento de rotação de um sólido é mais facilmente descrito em
termos de deslocamentos angulares e de velocidades angulares, uma vez que eles
são, num dado instante, iguais entre as diferentes partículas.
O movimento de rotação é, usualmente, descrito de dois modos alternativos:
− através do ângulo de rotação, θ(t); ou,
− através do vector rotação ou vector velocidade angular, ω(t).
2.3.2 Descrição do movimento de rotação através do ângulo de rotação θ(t)
Considere-se um corpo rígido em movimento de rotação e sejam A e B duas
partículas quaisquer não pertencentes ao eixo de rotação. Sejam θA e θB os ângulos
de rotação nesses pontos medidos em relação a um plano de referência que contém
o eixo de rotação Oz e o eixo Ox, e seja ϕ o ângulo de desfasamento dos planos
52
Capítulo 2
temporais que contêm, respectivamente, A e B e o eixo de simetria. O ângulo de
rotação θA(t) pode ser definido por:
θ A (t ) = θ B (t ) + ϕ , ∀A, B
a) Representação no sistema Oxyz.
(2.7)
b) Corte por um plano perpendicular ao
eixo de rotação Oz.
Figura 2.5 – Movimento de rotação em torno do eixo Oz.
Como o movimento do corpo rígido é de rotação, então o ângulo de
desfasamento, ϕ, é constante durante esse movimento. Portanto, derivando a
expressão em ordem ao tempo, vem:
ωA =
dθ A dθ B dϕ
=
+
dt
dt
dt
(2.7)
como o ângulo ϕ é constante no tempo, a derivada dϕ dt é igual a zero, logo:
ω A = ω B ; ∀A, B
(2.8)
ou seja, as velocidades angulares instantâneas são iguais em todas as partículas.
Face ao exposto, fica evidente que as grandezas cinemáticas, como a
r
r
velocidade vectorial instantânea, v (t ) , e a aceleração vectorial instantânea, a (t ) , de
um corpo rígido em movimento de rotação, podem ser definidos de forma idêntica
àquela abordada para a cinemática da partícula, uma vez que o ângulo de rotação, a
velocidade angular e, consequentemente, a aceleração angular é igual em todos os
pontos do corpo.
53
Cinemática de um sistema de partículas
Assim, a velocidade vectorial instantânea de um corpo rígido sujeito a um
movimento de rotação é definida por ter:
− Direcção: tangente à trajectória no ponto considerado, que se
encontra localizado num plano perpendicular ao eixo de
rotação passando pela partícula considerada.
− Sentido:
o da progressão do movimento associado à trajectória
circular de cada partícula.
r
r
r
− Grandeza: v (t ) = vθ (t ) = r (t ) ⋅ ω
Da mesma forma, a aceleração vectorial instantânea de um corpo rígido sujeito
a um movimento de rotação é definido por:
r
r
r
a (t ) = at (t ) + an (t ) ;
r
r
dv r d 2 s r
at (t ) = dt ⋅ u = dt 2 ⋅ u = r ⋅ α ⋅ u
2
ar (t ) = v ⋅ nr = r ⋅ ω 2 ⋅ nr
n
R
(2.9)
− Direcção: é definida de forma a que tg (δ ) = at an .
− Sentido:
para o interior da trajectória.
r
− Grandeza: a = at2 + an2 = r ⋅ α 2 + ω 4
2.3.3 Descrição do movimento de rotação através do vector rotação
Quando se estudou o movimento circular de uma partícula viu-se que a
velocidade vectorial instantânea pode ser expressa por:
r
r
r
v A (t ) = ω (t ) × rA (t ) ; ∀A
(2.10)
Também se viu no ponto anterior que num corpo rígido em rotação as velocidades
angulares em todas as partículas desse corpo são iguais num dado instante, isto é:
∀A, B
ω A (t ) = ω B (t )
(2.11)
Isto significa que a velocidade angular de qualquer partícula de um corpo rígido em
rotação designa a velocidade angular do sólido.
54
Capítulo 2
Sabendo que o vector velocidade angular tem direcção perpendicular ao plano
do movimento circular (ou seja, a direcção do eixo de rotação, ∆) então esse vector
pode ser definido como:
r
r
ω (t ) = ω (t ) ⋅ u∆
(2.12)
r
onde u ∆ é o versor do eixo de rotação ∆.
r
Deforma idêntica, o vector aceleração angular, α , do sólido em rotação é
definido por:
r
r
dω (t ) dω (t ) r
α (t ) =
=
⋅ u ∆ = α (t ) ⋅ u ∆
dt
dt
r
(2.13)
Verifica-se que a velocidade vectorial instantânea
do sólido em rotação é sempre dada por:
r
r
r
dr (t ) r
= ω (t ) × r (t )
v (t ) =
(2.14)
dt
independentemente da origem do sistema de
eixos cartesiano, desde que esteja situado no eixo
de rotação.
Figura 2.6 – Definição do movimento
de rotação através do
vector rotação.
A justificação da afirmação anterior pode ser obtida definindo o vector
r
posição r (t ) ilustrado na figura 2.6 através da seguinte adição vectorial:
r
r
r (t ) = r ' (t ) + O' O
(2.15)
então,
r
r
r
r
r
r
r
r
dr (t ) r
v (t ) =
= ω (t ) × r (t ) = ω (t ) × r ' (t ) + O ' O = ω (t ) × r ' (t ) + ω (t ) × O' O
dt
[
]
(2.16a)
r
r
como os vectores ω (t ) e O ' O são paralelos, então o produto vectorial ω (t ) × O ' O é
igual ao vector nulo. Verifica-se portanto que:
55
Cinemática de um sistema de partículas
r
r
r
r
r
dr (t ) r
v (t ) =
= ω (t ) × r (t ) = ω (t ) × r ' (t ) ; ∀O, O '
dt
(2.16b)
Assim, a determinação do vector velocidade instantânea pode ser obtida a
partir do vector rotação e do vector posição, independentemente da origem, O ou
O', considerada no eixo de rotação.
De igual modo, a aceleração vectorial instantânea de qualquer partícula P de
um corpo rígido em movimento de rotação é definida como:
r
r
r
dv p (t ) d r
r
r
r
dω (t ) r
drP (t )
a p (t ) =
= [ω (t ) × rP (t )] =
× rP (t ) + ω (t ) ×
=
dt
dt
dt
dt
r
r
r
r
= α (t ) × rP (t ) + ω (t ) × v p (t )
(2.17)
r
A aceleração vectorial instantânea a p pode ser definida através da soma das
seguintes duas parcelas:
r
r
r
a p (t ) = at (t ) + an (t ) ; com
P
P
r
r
r
at (t ) = α (t ) × rP (t )
r
r
r
an (t ) = ω (t ) × v p (t )
P
(2.18)
P
r
2.3.4 Operador de rotação, ω ×
r
Como se viu anteriormente, a velocidade vectorial instantânea, v (t ) , de um
sólido em rotação é dada por:
r
r
r
v (t ) = ω (t ) × r (t )
(2.19)
independentemente da posição do ponto de origem situado no eixo de rotação.
Como, por definição:
r
r
dr (t )
v (t ) =
dt
então igualando as expressões (2.19) e (2.20), vem:
r
r
dr (t ) r
= ω (t ) × r (t )
dt
56
(2.20)
(2.21)
Capítulo 2
Isto significa que o operador matemático d dt de derivação temporal é equivalente
r
r
ao operador matemático ω × , desde que o operando (neste caso r ) sobre o qual o
operador actua seja um vector de grandeza constante. Na realidade, num corpo
rígido em rotação, todas as partículas mantêm a mesma distância ao eixo de rotação,
r
embora a direcção e o sentido de r se altere.
NOTA: Em geral, o movimento de rotação de um sólido apresenta uma velocidade
vectorial instantânea de grandeza variável. Por isso é que:
r
r
dv (t ) r
≠ ω (t ) × v (t )
(2.22)
dt
r
No entanto, quando o movimento circular é uniforme (isto é, v =constante)
então verifica-se a seguinte igualdade:
r
r
dv (t ) r
= ω (t ) × v (t )
(2.23)
dt
De facto, viu-se anteriormente que no movimento circular uniforme o
vector aceleração instantânea só tem componente normal dada por:
r
r
r
an (t ) = ω (t ) × v (t )
(2.24)
r
Mais uma vez se confirma que o operador de rotação ω × tem o
significado do operador matemático d dt quando o operando tem
grandeza constante.
Exercício de aplicação
57
Cinemática de um sistema de partículas
58
Capítulo 2
59
Cinemática de um sistema de partículas
2.4 MOVIMENTO GERAL DO SÓLIDO
2.4.1 Velocidade e aceleração
O movimento geral de um corpo rígido no espaço pode ser decomposto em
movimentos simples elementares independentes constituídos por movimentos de
translação e rotação.
O movimento de um corpo rígido pode ser caracterizado por um dos seguintes
movimentos-tipo:
– Movimento plano:
Todas as partículas se deslocam em planos paralelos.
– Movimento em torno de um ponto fixo: O corpo efectua a designada
precessão em torno de um ponto fixo (por exemplo, o
pião a girar em torno de um ponto de contacto com o
solo).
– Movimento de rotação e deslizamento (movimento roto-translatório): Os
pontos do eixo de rotação deslocam-se sobre ele,
permanecendo sobre essa direcção (exemplo:
movimento de um parafuso ou movimento helicoidal).
Sejam A e B duas partículas de
um corpo rígido. Como se viu
anteriormente, o vector posição
r
rB pode ser obtido da seguinte
maneira:
r
r
r
rB (t ) = rA (t ) + rB / A (t ) (2.25)
Desta
forma,
o
vector
r
velocidade em B, vB , é por
definição igual a:
r
r
r
r
drB (t ) drA (t ) drB / A (t )
=
+
vB (t ) =
dt
dt
dt
(2.26)
Figura 2.7 – Movimento geral.
60
Capítulo 2
Ou seja:
r
r
r
vB (t ) = v A (t ) + vB / A (t )
(2.27)
r
em que vB / A (t ) é a velocidade de B relativamente ao referencial Ax'y'z', ligado ao
ponto A e de orientação fixa. Dado que o ponto A está fixo neste referencial, o
movimento do corpo relativo a Ax'y'z' é o movimento de um corpo com um ponto
r
fixo. Assim, a velocidade vB / A (t ) pode obter-se como a velocidade em torno do
r
ponto fixo A, ou seja, do movimento circular, com vector rotação ω , em torno do
eixo de rotação que passa pelo ponto A:
r
r
r
vB / A (t ) = ω (t ) × rB / A (t )
(2.28)
Portanto, a velocidade num ponto qualquer, B, de um corpo rígido com um
movimento geral é dado por:
r
r
r
r
vB (t ) = v A (t ) + ω (t ) × rB / A (t )
(2.29)
r
em que a primeira parcela da soma vectorial, v A (t ) , representa a componente de
r
r
translação e a segunda parcela, ω (t ) × rB / A (t ) , representa a componente de rotação.
A aceleração de B obtém-se por um raciocínio idêntico. Primeiro escreve-se:
r
r
r
aB (t ) = a A (t ) + aB / A (t )
(2.30)
r
em que aB / A é a aceleração de B relativamente ao referencial Ax'y'z' ligado a A e de
r
orientação fixa. Assim, a aceleração aB / A pode obter-se como a aceleração em torno
do ponto fixo A, ou seja, do movimento circular em torno do eixo de rotação que
r
passa por A e é caracterizado pelo vector rotação ω :
r
r
r
aB / A (t ) = (aB / A )t (t ) + (aB / A )n (t ) =
r
r
r
r
= α (t ) × rB / A (t ) + ω (t ) × vB / A (t ) =
r
r
r
r
r
= α (t ) × rB / A (t ) + ω (t ) × [ω (t ) × rB / A (t )]
(2.31)
Portanto, a aceleração num ponto qualquer, B, de um corpo rígido em movimento
(geral) é dado por:
r
r
r
r
r
r
r
aB (t ) = a A (t ) + α (t ) × rB / A (t ) + ω (t ) × [ω (t ) × rB / A (t )]
(2.32)
61
Cinemática de um sistema de partículas
r
em que a primeira parcela da soma vectorial, a A (t ) , representa a componente de
translação e as segunda e terceira parcelas representam a componente de rotação,
r
r
correspondendo a segunda parcela, α (t ) × rB / A (t ) , à componente tangencial e a
r
r
r
terceira parcela, ω (t ) × [ω (t ) × rB / A (t )], à componente normal.
As equações de velocidade e de aceleração de um corpo rígido em movimento
geral mostram que esse movimento é equivalente, num dado instante, à soma de
uma translação, na qual todas as partículas do corpo têm a mesma velocidade e a
mesma aceleração que a partícula de referência A, e um movimento (de rotação) no
qual a partícula A se considera fixa.
2.4.2 Teoria do campo das velocidades de um corpo rígido
Como se viu no ponto anterior, a velocidade absoluta da partícula B em
movimento geral, no referencial absoluto ou fixo, é dada por:
r
r
r drA drB / A
+
=
vB =
dt
dt
r
r
r
r
di '
dj '
dk '
= vA + x ⋅
+ y⋅ + z⋅
(2.33)
dt
dt
dt
r
sendo v A a velocidade no ponto A do referencial móvel relativamente ao referencial
fixo.
Por outro lado, de acordo com o conceito de operador de rotação, visto em
2.3.4, o operador matemático d dt de derivação temporal é equivalente ao
r
r r
r
operador matemático ω × desde que os operandos (neste caso i ' , j ' e k ' ) sobre o
qual o operador actua, sejam vectores de grandeza constante. Assim,
r
di ' r r
=ω ×i '
(2.34a)
dt
r
dj ' r r
= ω × j'
(2.34b)
dt
r
dk ' r r
=ω ×k'
(2.34c)
dt
representando estas três expressões as fórmulas de Poisson. Assim,
62
Capítulo 2
(
r
r
r
r r
r
vB = v A + ω × x ⋅ i '+ y ⋅ j '+ z ⋅ k '
)
(2.35)
ou seja, como se viu anteriormente:
r r
r r
vB = v A + ω × rB / A
(2.36)
representando esta expressão a designada lei das velocidades de um corpo rígido,
r
onde vB representa o vector do campo de velocidades. Assim,
r
vB
– Velocidade absoluta de B pertencente ao sólido móvel em
movimento geral, no referencial fixo ou absoluto.
r
vA
r
– Velocidade vectorial instantânea no referencial fixo do ponto
A do sólido móvel e, portanto, do referencial móvel; como se
o sólido não rodasse no espaço, isto é, como se o sólido
apenas estivesse submetido ao movimento de translação
independente da velocidade de todas as partículas dada por
r
vA .
r
ω × rB / A – Velocidade vectorial instantânea de qualquer partícula B do
sólido móvel, devido ao movimento de rotação instantâneo do
sólido em torno do seu eixo de rotação instantâneo
r
caracterizado pelo vector ω .
NOTAS: O vector do campo de velocidades do movimento geral de um sólido
contém os casos particulares de translação pura e rotação pura.
1. Translação pura (movimento geral de um corpo rígido sem rotação):
r r
r r
∀A, B
ω = 0 ⇒ vB = v A
(2.37)
2. Rotação pura (movimento geral de um corpo rígido sem translação):
r r
r
r r
∀A, B
v A = 0 ⇒ vB = ω × rB / A
(2.38)
r
3. ω é um vector livre
Verifica-se que a expressão (2.36) é sempre a mesma qualquer que seja o
referencial considerado:
r r
r r
vB = v A + ω × rB / A
(2.39a)
63
Cinemática de um sistema de partículas
r r
r r
vC = v A + ω × rC / A
(2.39b)
subtraindo as expressões (2.39a) e (2.39b) obtém-se:
r r
r r
r
vB − vC = ω × (rB / A − rC / A ) ⇒
⇒
r r
r r
vB = vC + ω × rB / C
r
ou seja, ω é um vector livre.
Exercício de aplicação
64
(2.40)
Capítulo 2
65
Cinemática de um sistema de partículas
2.5 MOVIMENTO PLANO DO SÓLIDO
2.5.1 Definição
O movimento plano de um corpo
rígido é um movimento durante o
qual todos os pontos do corpo se
deslocam paralelamente a um plano
fixo. Durante o movimento plano,
todos os pontos do corpo situados
sobre uma perpendicular ao plano
deslocam-se do mesmo modo.
2.5.1.1.1.1.1.1
a) Movimento paralelo a um plano fixo π.
Por isso, para se estudar o
movimento do corpo basta estudar o
movimento de qualquer secção, S(t),
obtida pela intersecção do corpo por
um plano paralelo ao plano fixo de
referência.
b) Corte obtido pelo plano β paralelo ao plano π.
Figura 2.8 –
Movimento plano de um sólido.
Figura 2.9a – Decomposição do movimento plano (exemplo 1).
66
Capítulo 2
Figura 2.9b – Decomposição do movimento plano (exemplo 2).
Como se pode observar nos dois exemplos das figuras 2.9 (a e b), o
movimento plano geral de um sólido pode ser considerado como a soma de uma
translação com uma rotação.
2.5.2 Velocidade absoluta e velocidade relativa no movimento plano
No ponto anterior viu-se que qualquer movimento plano de uma placa pode
ser substituído por uma translação, definida pelo movimento de qualquer ponto de
referência A e, simultaneamente, por uma rotação em torno de A. A velocidade
r
absoluta vB de uma partícula B da placa obtém-se a partir da fórmula da velocidade
relativa deduzida em 2.4.1:
r
r
r
vB (t ) = v A (t ) + vB / A (t )
(2.41)
Figura 2.10 – Velocidade absoluta e velocidade relativa.
67
Cinemática de um sistema de partículas
r
A velocidade v A corresponde à translação da placa com o ponto A, enquanto
r
que a velocidade relativa vB / A está associada à rotação da placa em torno do ponto A
e é medida em relação ao referencial centrado em A e com orientação fixa.
r
r
Representando por rB / A o vector posição de B relativamente a A, e por ω (ou
r
ω ⋅ k ) a velocidade angular da placa em relação aos eixos com orientação fixa
r
então, a velocidade relativa, vB / A , pode ser definida por:
r
r
r
vB / A (t ) = ω (t ) × rB / A (t ) ; com
r
vB / A = r ⋅ ω
(2.42)
na qual r é a distância do ponto A ao ponto B. Substituindo na expressão (2.41),
vem:
r r
r
r
vB (t ) = v A (t ) + ω (t ) ⋅ k × rB / A (t )
(2.43)
A caracterização da cinemática do movimento plano através das
representações vectoriais com produtos vectoriais é, de certo modo, mais trabalhosa
que outros tipos de representação cinemática do movimento plano que recorrem a
outras características do movimento plano.
Assim, como a teoria do campo de velocidades (TCV), isto é a cinemática, é
uma teoria de campo de momentos (TCM) do vector campo de velocidade, também
existe uma propriedade projectiva da TCV obtida de modo análogo à propriedade
projectiva da TCM (vista na disciplina de Mecânica I):
r r
r r
vB = v A + ω × rB / A ⇒
⇒
r r
r r
r r
r
vB ⋅ rB / A = v A ⋅ rB / A + ω × rB / A ⋅ rB / A
(2.44)
r r
r
como os vectores ω × rB / A e rB / A são
perpendiculares, então o seu produto escalar é
nulo, vindo:
Figura 2.11 – Propriedade projectiva.
68
⇒
r r
r r
vB ⋅ rB / A ⋅ cos β = v A ⋅ rB / A ⋅ cos α
⇒
vB ⋅ cos β = v A ⋅ cos α
⇒
(2.45)
Capítulo 2
Por intermédio desta relação, se for conhecido o vector velocidade num ponto
e a direcção da velocidade noutro ponto, a grandeza dessa outra velocidade é
determinável pelo teorema das projecções das velocidades.
A caracterização cinemática do movimento plano pode então ser feito através
das trajectórias dos pontos da secção plana, das suas velocidades e acelerações,
como já referido anteriormente.
– Equações paramétricas (duas equações temporais para a localização no
espaço, para cada instante t, e uma equação temporal para definir a
variação angular, ϕ, em cada instante t):
x = x(t )
y = y (t )
ϕ = ϕ (t )
(2.46)
O ângulo de rotação de qualquer direcção será:
θ (t ) = ϕ (t ) − ϕ (t0 ) ; geralmente t0 = 0
(2.47)
– As velocidades de qualquer ponto B serão tais que:
r r
r
r
vB (t ) = v A (t ) + ω (t ) ⋅ k × rB / A (t )
(2.48)
– As acelerações serão:
r
r r
r r
r
r
dvB (t ) r
aB (t ) =
= a A (t ) + α (t ) ⋅ k × rB / A (t ) + ω (t ) ⋅ k × ω (t ) ⋅ k × rB / A (t )
dt
[
]
(2.49)
r
em que a primeira parcela da soma vectorial, a A (t ) , representa a
componente de translação e as segunda e terceira parcelas representam a
componente de rotação, correspondendo a segunda parcela,
r r
α (t ) ⋅ kr × rB / A (t ) r, à componente tangencial e a terceira parcela,
r
ω (t ) ⋅ k × ω (t ) ⋅ k × rB / A (t ) , à componente normal.
[
]
69
Cinemática de um sistema de partículas
Exercício de aplicação
70
Capítulo 2
2.5.3 Centro instantâneo de rotação (CIR) no movimento plano
O conceito de centro instantâneo de rotação (CIR) permite aplicar um processo
alternativo ao anterior de descrever o campo de velocidades de uma secção plana
em movimento geral.
Define-se centro instantâneo de
rotação como sendo o ponto do
plano da secção que num
determinado
instante
tem
velocidade nula.
Figura 2.12 – Centro instantâneo de rotação (CIR).
71
Cinemática de um sistema de partículas
Assim, as velocidades de todas as partículas da secção são as mesmas que se
obteriam pela rotação dessa secção em torno de um eixo perpendicular ao plano e
que passasse pelo ponto CIR:
v A = ω ⋅ rA / CIR
(2.50)
em que rA / CIR representa a distância entre o ponto genérico A e o centro instantâneo
r
r
de rotação (CIR). Note-se que os vectores v A e rA / CIR são perpendiculares.
A posição do CIR pode definir-se através da
consideração das direcções dos vectores velocidade
de duas partículas, A e B, da secção. O CIR obtém-se
r
pelo traçado da perpendicular a v A passando por A e
r
da perpendicular a vB passando por B e determinando
o ponto de intersecção destas duas linhas.
Figura 2.13 – Determinação da
posição do CIR.
Para verificar que de facto o ponto assim determinado é o centro instantâneo
de rotação, considere-se, por redução a uma hipótese absurda que a velocidade no
CIR não era nula, isto é, vCIR ≠ 0 . Por aplicação do teorema das projecções das
velocidades tem-se que:
v A ⋅ cos α = vCIR ⋅ cos β
(2.51)
r
r
como os vectores v A e rA / CIR são perpendiculares, ou seja α é igual a 90° (portanto,
cos α = 0 ), então:
v A ⋅ cos α = 0
⇒
vCIR ⋅ cos β = 0
(2.52)
como se considerou por hipótese que a velocidade no CIR não era nula ( vCIR ≠ 0 )
então a segunda igualdade expressa em (2.52) só seria possível se cos β = 0 , ou
seja, se β fosse igual a 90°. Neste caso, a velocidade no CIR teria que se
r
perpendicular a rA / CIR .
Considerando o mesmo raciocínio entre B e CIR, e mantendo a mesma
hipótese (absurda) inicial, concluí-se que a velocidade em CIR também teria que ser
r
r
r
perpendicular a rB / CIR . Como rA / CIR e rB / CIR não têm a mesma direcção, então a
igualdade:
72
Capítulo 2
vCIR ⋅ cos β = 0
(2.53)
só é possível se a velocidade no CIR for nula ( vCIR = 0 ).
O grande interesse na aplicação do conceito de centro instantâneo de rotação
consiste na possibilidade de determinar de forma expedita a velocidade em qualquer
ponto da secção, uma vez conhecida a localização do CIR. Nesta situação, a
velocidade em qualquer ponto da secção pode ser obtida multiplicando unicamente
a velocidade angular com a distância desse ponto ao CIR. De facto, pela lei geral
das velocidades tem-se que:
r r
r
r
vB = vCIR + ω × rB / CIR
(2.54)
r
r
como vCIR = 0 , então:
r r
r
vB = ω ⋅ k × rB / CIR
(2.55)
ou seja:
r
r
v B = ω ⋅ rB
/ CIR
(2.56)
Portanto, a grandeza das velocidades em dois quaisquer pontos são proporcionais às
suas distâncias ao CIR:
v A ω ⋅ rA / CIR rA / CIR
=
=
v B ω ⋅ rB / CIR rB / CIR
(2.57)
Alguns casos particulares de localização do CIR
1º)
Movimento plano de rolamento, sem deslizamento, de um cilindro
qualquer sobre uma superfície fixa
O centro instantâneo de rotação em qualquer instante – CIR(t) – situa-se
no ponto de contacto do corpo com a superfície fixa (vsup.fixa=0):
73
Cinemática de um sistema de partículas
Figura 2.14 – Localização do CIR na superfície fixa de contacto.
Neste caso, a superfície fixa é a trajectória dos CIR’s (lugar geométrico
dos pontos instantâneos com velocidade nula)
2º)
Localização do CIR quando as velocidades em dois pontos quaisquer A e
B são paralelas e a direcção AB não é perpendicular à direcção comum
das velocidades
Figura 2.15 – Localização do CIR dum corpo em translação instantânea.
Pelo teorema das projecções das velocidades, vem:
v A ⋅ cos α = vB ⋅ cos β
(2.58)
como o ângulo α é igual ao ângulo β, então os respectivos co-senos são
iguais, logo, a igualdade (2.58) só será válida se as velocidades em A e B
forem iguais:
α = β ⇒ cos α = cos β ⇒ v A = vB ; ∀A, B
(2.59)
Este caso corresponde a uma situação de translação instantânea pura,
logo as velocidades em qualquer ponto são iguais e, consequentemente, o
CIR encontra-se no infinito.
3º)
74
Localização do CIR quando as velocidades em dois pontos quaisquer A e
B são paralelas e a direcção AB perpendicular à direcção comum das
velocidades
Capítulo 2
Como se viu anteriormente,
v A rA / CIR
=
vB rB / CIR
(2.60)
Pelo teorema de Tales é possível
determinar a posição do CIR.
Figura 2.16 – Localização do CIR.
Exercício de aplicação
75
Cinemática de um sistema de partículas
2.6 CINEMÁTICA DO MOVIMENTO RELATIVO
2.6.1 Considerações gerais e definições
O objectivo deste sub-capítulo é estudar as características do movimento de
uma partícula ou de um sistema de partículas num referencial móvel, conhecida a
descrição desse movimento num referencial (pseudo-)fixo em relação ao qual o
movimento do referencial móvel é detectado.
Existem inúmeras aplicações deste tipo de movimento, como por exemplo:
– movimento de um passageiro num comboio em movimento relativamente à
estação;
– movimento de um astronauta relativamente à nave em movimento
relativamente à Terra;
– movimento de zonas atmosféricas ou oceânicas relativamente a outras
zonas atmosféricas ou oceânicas em movimento;
– etc.
Neste tipo de movimentos consideram-se dois referenciais: um referencial
S1(x, y, z) considerado absoluto ou fixo e um referencial S(x, y, z) considerado
móvel em relação ao referencial S1 fixo.
O movimento absoluto de uma partícula M, ou de um sistema de partículas,
em relação ao referencial fixo S1, pode ser considerado como a resultante
cinemática do movimento de condução e do movimento relativo, assim definidos:
– Movimento relativo –
movimento de qualquer partícula M em relação ao
referencial móvel S.
– Movimento de condução, transporte ou arrastamento – movimento do
referencial móvel S relativamente ao referencial
fixo S1, como se as partículas M não se movessem
no referencial móvel S, isto é, como se
pertencessem a um corpo que está “colado” ao
referencial S.
76
Capítulo 2
No exemplo atrás referido de um passageiro em movimento num comboio em
movimento relativamente à estação (fixa), as analogias são as seguintes:
– Movimento relativo –
é o movimento do passageiro em relação ao
comboio (ou seja, está ligado ao referencial
móvel);
– Movimento de condução, transporte ou arrastamento – é o movimento do
comboio relativamente ao exterior ou à estação (ou
seja, é o movimento que o passageiro teria em
relação ao exterior se estivesse “amarrado” à
cadeira);
– Movimento absoluto ou resultante – é o movimento do passageiro que se
encontra sobre um comboio que, por sua vez,
também está em movimento relativamente à
estação (fixa).
Figura 2.17 – Movimento relativo.
Neste caso, a posição de um ponto M qualquer pode ser obtido da seguinte
forma:
r
r
r
rM / O (t ) = rO / O (t ) + rM / O (t ) ; ∀M , ∀t
(2.61)
1
1
ou seja,
r r
r
r
r
r
r
x1 (t ) ⋅ i1 + y1 (t ) ⋅ j1 + z1 (t ) ⋅ k1 = rO / O (t ) + x(t ) ⋅ i (t ) + y (t ) ⋅ j (t ) + z (t ) ⋅ k (t )
1
(2.62)
77
Cinemática de um sistema de partículas
r
r r r
r r
onde i1 , j1 e k1 são os versores espacialmente e temporalmente fixos; e, i , j e k
são os versores de orientação espacial variável no tempo.
De seguida vai-se identificar quais as variáveis e as constantes associadas aos
movimentos absoluto, relativo e de transporte (ou condução).
– Movimento relativo:
r
r
r
r
variáveis – x1(t), y1(t), z1(t), x(t), y(t), z(t), i (t ) , j (t ) , k (t ) , rO / O (t )
r r r
constantes – i1 , j1 , k1
1
– Movimento condução, transporte ou arrastamento:
r
r
r
r
variáveis – i (t ) , j (t ) , k (t ) , rO / O (t )
1
constantes – x(t), y(t), z(t)
– Movimento relativo:
variáveis – x(t), y(t), z(t)
r
r
r
r
constantes – i (t ) , j (t ) , k (t ) , rO / O (t )
1
2.6.2 Teorema da composição das velocidades
Por definição, a velocidade absoluta é dada por:
r
r
r
r
drM / O (t )
r
= x&1 (t ) ⋅ i1 + y&1 (t ) ⋅ j1 + z&1 (t ) ⋅ k1
vabs (t ) =
dt
1
ou então,
[
]
r
r
d r
vabs (t ) =
rO / O (t ) + rM / O (t )
dt
r
r
r
r
drO / O (t ) d
=
+
x(t ) ⋅ i (t ) + y (t ) ⋅ j (t ) + z (t ) ⋅ k (t )
dt
dt
r
r
r
r
r
r
r
drO / O (t )
di
dj
dk
=
+ x& ⋅ i + x ⋅ + y& ⋅ j + y ⋅ + z& ⋅ k + z ⋅
dt
dt
dt
dt
1
1
1
78
[
]
(2.63)
Capítulo 2
=
r
drO / O (t )
1
dt
r
r
r
r di
r
r
dk
dj
+ x& ⋅ i + y& ⋅ j + z& ⋅ k + x ⋅ + y ⋅ + z ⋅
dt
dt
dt
(
)
Mas, por sua vez, a velocidade relativa é:
r
r
r
r
r
drM / O (t ) d
=
x(t ) ⋅ i + y (t ) ⋅ j + z (t ) ⋅ k
vrel (t ) =
dt
dt
r
r
r
r
⇒ vrel (t ) = x& ⋅ i + y& ⋅ j + z& ⋅ k
[
]
(2.64)
⇒
(2.65)
Comparando com a velocidade absoluta e tendo em conta que,
r
r
r
vabs (t ) = vrel (t ) + vcond (t )
(2.66)
r
então conclui-se que a velocidade de condução ou de transporte, vcond , é dada por:
r
r
r
r
drO / O (t ) di
r
dk
dj
+ x ⋅ + y ⋅ + z ⋅
vcond (t ) =
dt
dt
dt
dt
1
(2.67)
Tendo em conta as fórmulas de Poisson, apresentadas nas expressões 2.34,
sabe-se que:
r
r
di r
dt = ω cond × i
r
r
dj r
=
×
j
ω
cond
dt
r
dk r
r
= ω cond × k
dt
(2.68)
r
onde ω cond é o vector rotação associado à rotação do corpo rígido (e, portanto, do
referencial móvel que lhe está associado), com movimento de condução de
r
velocidade angular ω cond . Deste modo,
r
r
r
r
drO / O (t )
r
dk
dj
di
+ x⋅ + y⋅ + z⋅
vcond (t ) =
dt
dt
dt
dt
r
r
r
r
drO / O (t )
r
r
r
=
+ x ⋅ ω cond × i + y ⋅ ω cond × j + z ⋅ ω cond × k
dt
r
r
r
r
dr (t ) r
= O/O
+ ω cond × x ⋅ i + y ⋅ j + z ⋅ k
dt
1
1
1
(
)
79
Cinemática de um sistema de partículas
=
r
drO / O (t )
1
dt
r
r
+ ω cond (t ) × rM / O (t )
(2.69)
ou seja, é uma expressão do tipo:
r
r
r
r
vcond (t ) = v0 (t ) + ω cond (t ) × rM / O (t )
(2.70)
que traduz a cinemática do movimento geral do corpo rígido.
Resumindo, o teorema da composição das velocidades refere que a velocidade
vectorial absoluta de uma partícula M que se encontra em movimento em relação a
um referencial fixo é a soma vectorial da velocidade relativa dessa partícula em
relação ao referencial móvel com a velocidade do referencial móvel em relação ao
referencial fixo (velocidade de transporte, condução ou arrastamento), ou seja:
r
r
r
vabs (t ) = vrel (t ) + vcond (t )
r
r
r
r
vrel (t ) = x& ⋅ i + y& ⋅ j + z& ⋅ k
r
r
r
r
vcond (t ) = v0 (t ) + ω cond (t ) × rM / O (t )
2.6.3 Teorema da composição das acelerações ou teorema de Coriólis
Por definição, a aceleração absoluta é dada por:
r
r
r
r
d 2 rM / O (t )
r
&
&
&
&
&
&
x
(
t
)
i
y
(
t
)
j
z
(
t
)
k
aabs (t ) =
=
⋅
+
⋅
+
⋅
1
1
1
1
1
1
dt 2
1
ou então,
r
r
r
r
r
r
r
r
d drO / O (t )
di
dj
dk
+ x& ⋅ i + x ⋅ + y& ⋅ j + y ⋅ + z& ⋅ k + z ⋅
aabs (t ) =
dt dt
dt
dt
dt
r
r
r
r
r
r
r
d 2 rO / O (t )
di
di
d 2i
dj
=
+ &x& ⋅ i + x& ⋅ + x& ⋅ + x ⋅ 2 + &y& ⋅ j + y& ⋅ +
dt 2
dt
dt
dt
dt
r
r
r
r
r
2
2
r
dj
d j
dk
dk
d k
+ y& ⋅ + y ⋅ 2 + &z& ⋅ k + z& ⋅
+ z& ⋅
+ z⋅ 2
dt
dt
dt
dt
dt
1
1
80
(2.71)
Capítulo 2
r
r
r
r
r d 2i
r
r
d 2 rO / O (t )
r
d2 j
d 2k
aabs (t ) =
+ &x& ⋅ i + &y& ⋅ j + &z& ⋅ k + x ⋅ 2 + y ⋅ 2 + z ⋅ 2 +
dt 2
dt
dt
dt
r
r
r
di
dj
dk
+ 2 ⋅ x& ⋅ + y& ⋅ + z& ⋅
dt
dt
dt
1
(
)
Por sua vez, a aceleração relativa é:
r
r
r
r
r
dvrel (t ) d
arel (t ) =
=
x& (t ) ⋅ i + y& (t ) ⋅ j + z& (t ) ⋅ k
dt
dt
r
r
r
r
⇒ arel (t ) = &x&(t ) ⋅ i + &y&(t ) ⋅ j + &z&(t ) ⋅ k
[
]
(2.72)
⇒
(2.73)
Também por definição, a aceleração de transporte é:
r
r
r
r
r
r
dvcond (t ) d drO / O
di
dj
dk
acond (t ) =
=
+ x⋅ + y⋅ + z⋅
dt
dt dt
dt
dt
dt
1
⇒
r
r
r
r
d 2 rO / O (t )
r
d 2i
d2 j
d 2k
+ x⋅ 2 + y⋅ 2 + z⋅ 2
acond (t ) =
dt 2
dt
dt
dt
1
⇒
(2.74)
Identificando os termos respectivos com a expressão (2.72), verifica-se que:
r
r
r
di
r
r
r
dj
dk
aabs = arel + acond + 2 ⋅ x& ⋅ + y& ⋅ + z& ⋅
dt
dt
dt
(2.75)
onde a parcela adicional que surge nesta expressão (e que não aparece na
correspondente expressão da velocidade) é designada de aceleração complementar
ou aceleração de Coriólis:
r
r
r
di
r
dj
dk
acor = 2 ⋅ x& ⋅ + y& ⋅ + z& ⋅
dt
dt
dt
(2.76)
ou aplicando as fórmulas de Poisson (2.34):
(
r
r
r
r
r
r
r
acor = 2 ⋅ x& ⋅ ω cond × i + y& ⋅ ω cond × j + z& ⋅ ω cond × k
r
r
r
r
= 2 ⋅ ω cond × x& ⋅ i + y& ⋅ j + z& ⋅ k
(
)
)
(2.77)
r
vrel
81
Cinemática de um sistema de partículas
assim a aceleração de Coriólis pode ser definida condensadamente pela seguinte
expressão:
r
r
r
acor = 2 ⋅ ω cond × vrel
(2.78)
Então, o teorema da composição das acelerações diz que:
r
r
r
r
aabs = arel + acond + acor
(2.79)
Note-se que esta parcela adicional da aceleração (a aceleração de Coriólis) é
calculada a partir de características dos movimentos elementares tais como a
r
r
velocidade angular ω cond do movimento de condução e a velocidade vrel do
movimento relativo.
Logo, em qualquer corpo móvel, num referencial móvel em movimento
relativamente a um referencial fixo existirá aceleração de Coriólis, a qual implicará
o desenvolvimento de uma força adicional (ou complementar) sobre o corpo (de
r
r
acordo com o princípio fundamental da dinâmica: F = m ⋅ a ), que é designada de
r
força de Coriólis, Fcor .
Entre as aplicações e as consequências da existência da força de Coriólis em
problemas de cinemática de movimento relativo, menciona-se alguns exemplos:
– sentido de rotação dos vórtices atmosféricos nos hemisférios norte e sul;
– forças de Coriólis associadas ao movimento do astronauta reparando um
satélite no espaço;
– forças de Coriólis associadas a determinados fenómenos marítimos;
– variação terrestre das marés;
– estudo da evolução de fenómenos meteorológicos.
2.6.4 Casos particulares – Princípio da relatividade newtoniana
Se o sistema referencial móvel S tiver um movimento de translação em relação
r
r r
ao referencial fixo S1, então os versores i , j e k , bem como qualquer direcção
considerada no referencial móvel, ocuparão durante o movimento posições paralelas
r r r
entre si, pelo que os versores i , j e k , serão vectores constantes. Logo:
82
Capítulo 2
r
r
r
di dj dk r
=
=
=0
dt dt dt
(2.80)
e os teoremas da composição das velocidades e da composição das acelerações
serão expressos, respectivamente, por:
r
r
r
v abs = vrel + vcond
;
em que
r
r
r
r
v rel = x& ⋅ i + y& ⋅ j + z& ⋅ k
r
d rO / O (t )
r
vcond =
dt
(2.81)
1
r
r
r
r
arel = &x& ⋅ i + &y& ⋅ j + &z& ⋅ k
r
d 2 rO / O (t )
r
r
r
r
(2.82)
aabs = arel + acond ; em que acond =
2
dt
r
r
acor = 0
r
r r
A aceleração de Coriólis é nula atendendo ao facto dos versores i , j e k , serem
vectores constantes, ou seja, as respectivas derivadas são nulas, como está expresso
em (2.80), resultando, de acordo com a expressão (2.76), no anulamento da
aceleração de Coriólis.
1
r
r
Note-se que drO / O dt e d 2 rO / O dt 2 representam, respectivamente, as
velocidades e as acelerações do centro do referencial móvel em movimento de
translação, as quais coincidem com as velocidades e as acelerações do designado
movimento de transporte (condução ou arrastamento) do referencial móvel S
relativamente ao referencial fixo S1.
1
1
Se para além das premissas anteriores, o movimento de translação do
referencial móvel S relativamente ao referencial fixo S1, for um movimento
r
r
rectilíneo e uniforme, então d 2 rO / O dt 2 = 0 e o teorema da composição das
acelerações será:
1
r
r
aabs = arel
(2.83)
Desta expressão conclui-se que um corpo terá a mesma aceleração em dois
referenciais que executem, um em relação ao outro, um movimento de translação
83
Cinemática de um sistema de partículas
rectilíneo e uniforme. Isto traduz o designado Princípio da Relatividade
Newtoniana. Assim:
1º) Um movimento de translação rectilíneo e uniforme comum aos aparelhos
de medida e aos observadores, não altera as observações mecânicas;
2º) É impossível justificar com experiências mecânicas, realizadas num
sistema de partículas mecânico, se este está em repouso ou em
movimento rectilíneo e uniforme. Ou seja, repouso e movimento
rectilíneo e uniforme são duas facetas equivalentes da mesma realidade
mecânica.
84